A New First Break Picking for Three-Component VSP Data Using Gesture Sensor and Polarization Analysis


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
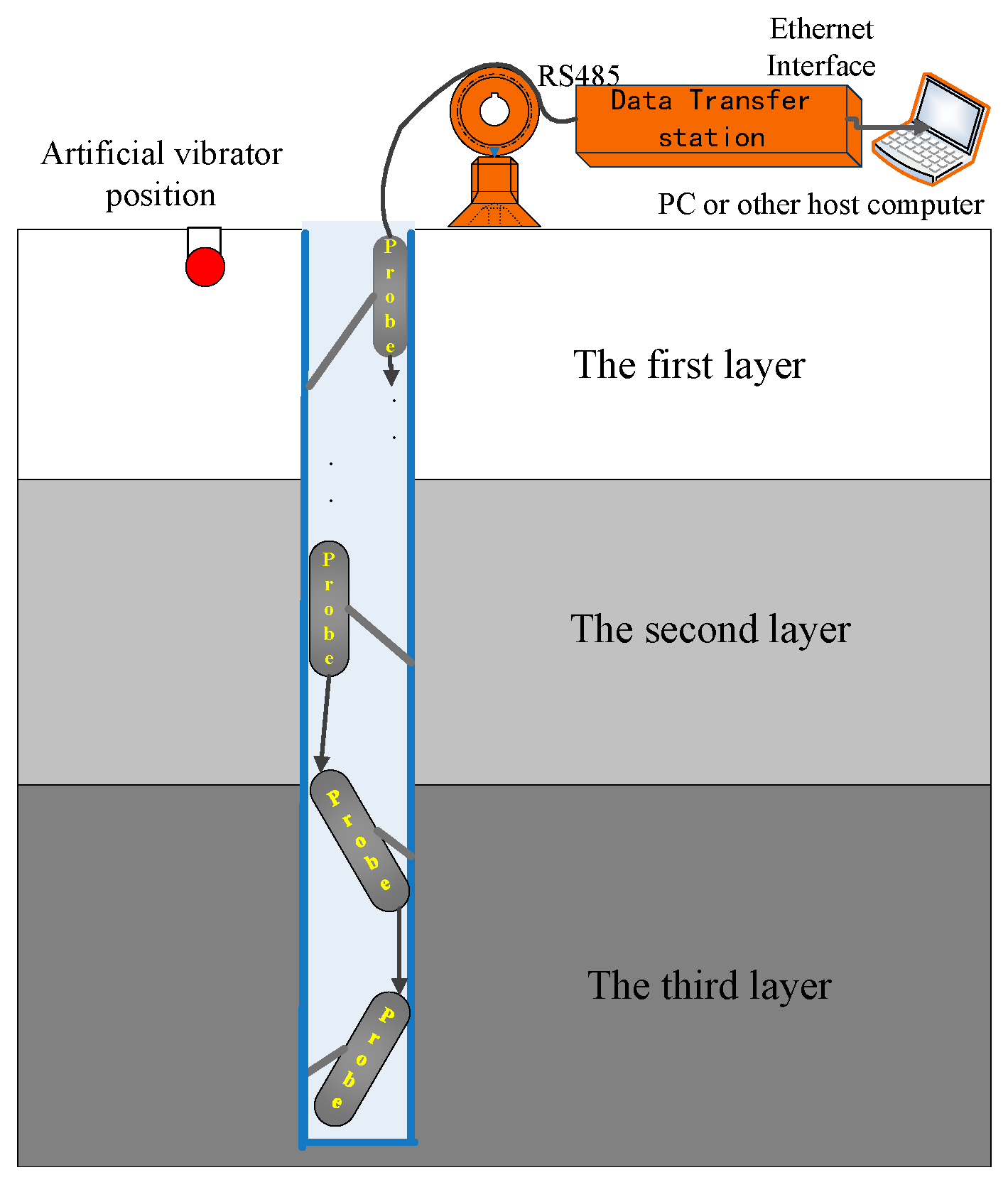
:1. Introduction
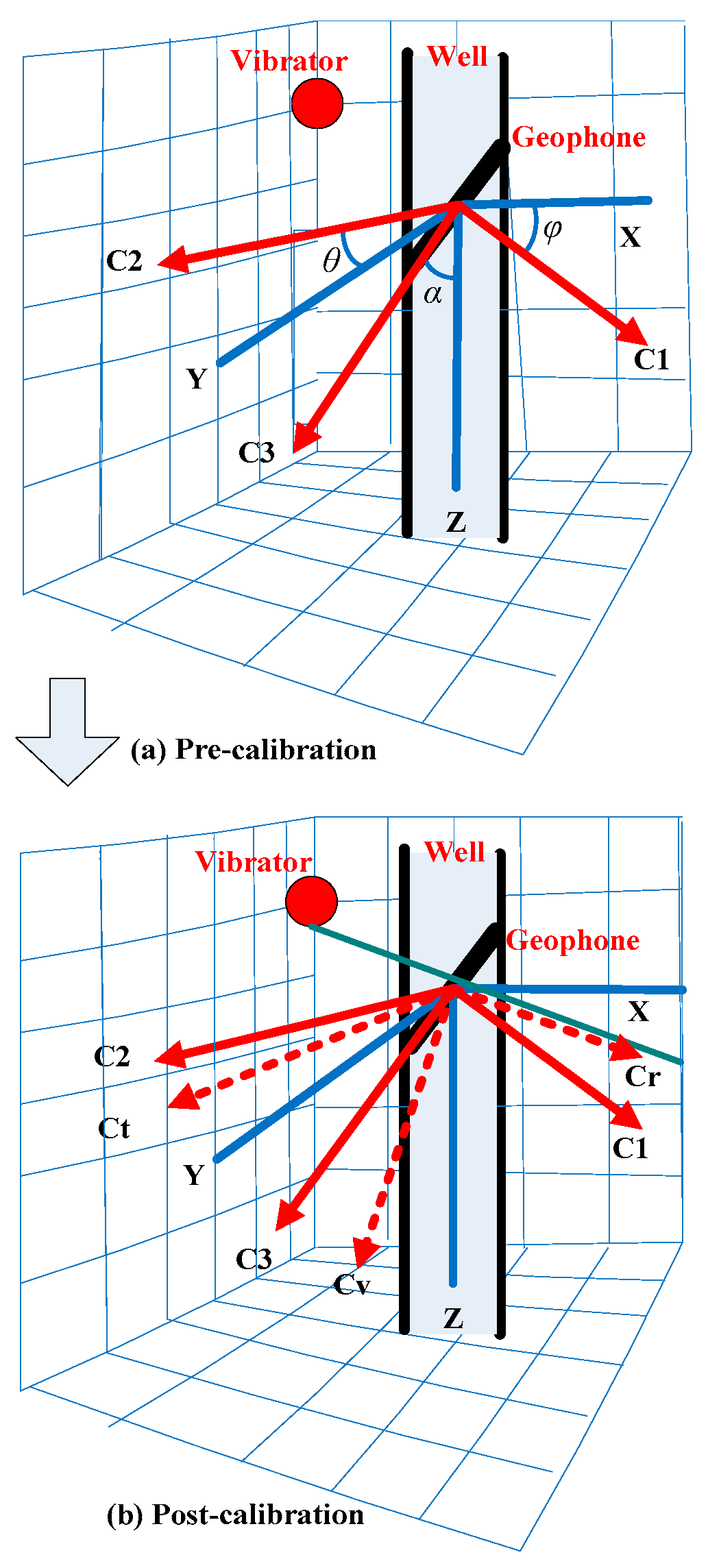
2. Rotation Calibration Algorithm Combined with Gesture Information
2.1. Gesture Information Detection Method
2.2. Rotation Calibration Algorithm
3. Improved AR-AIC Algorithm Using Polarization
3.1. AR-AIC Algorithm
3.2. Polarization Analysis
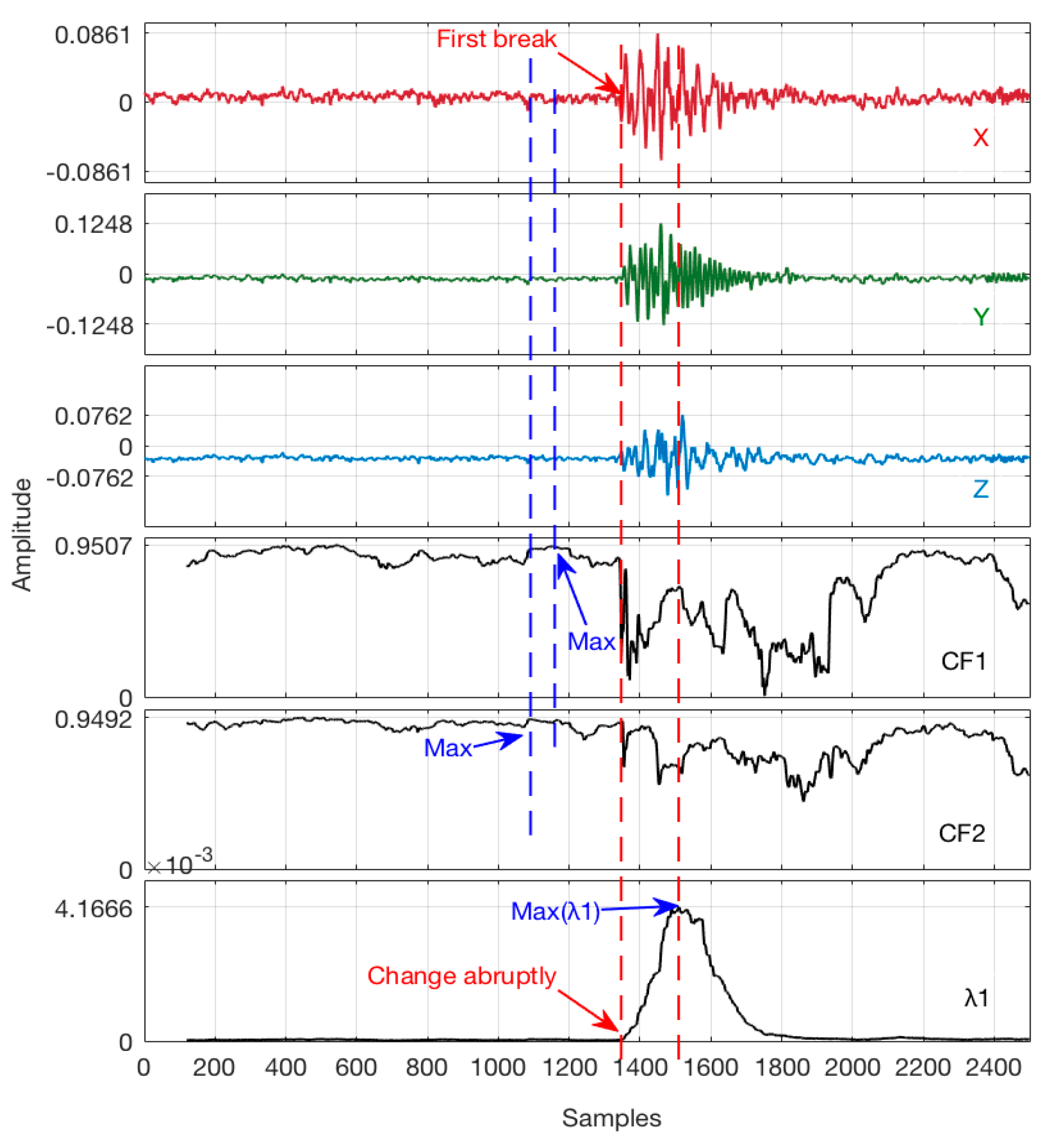
3.3. Improved Algorithm
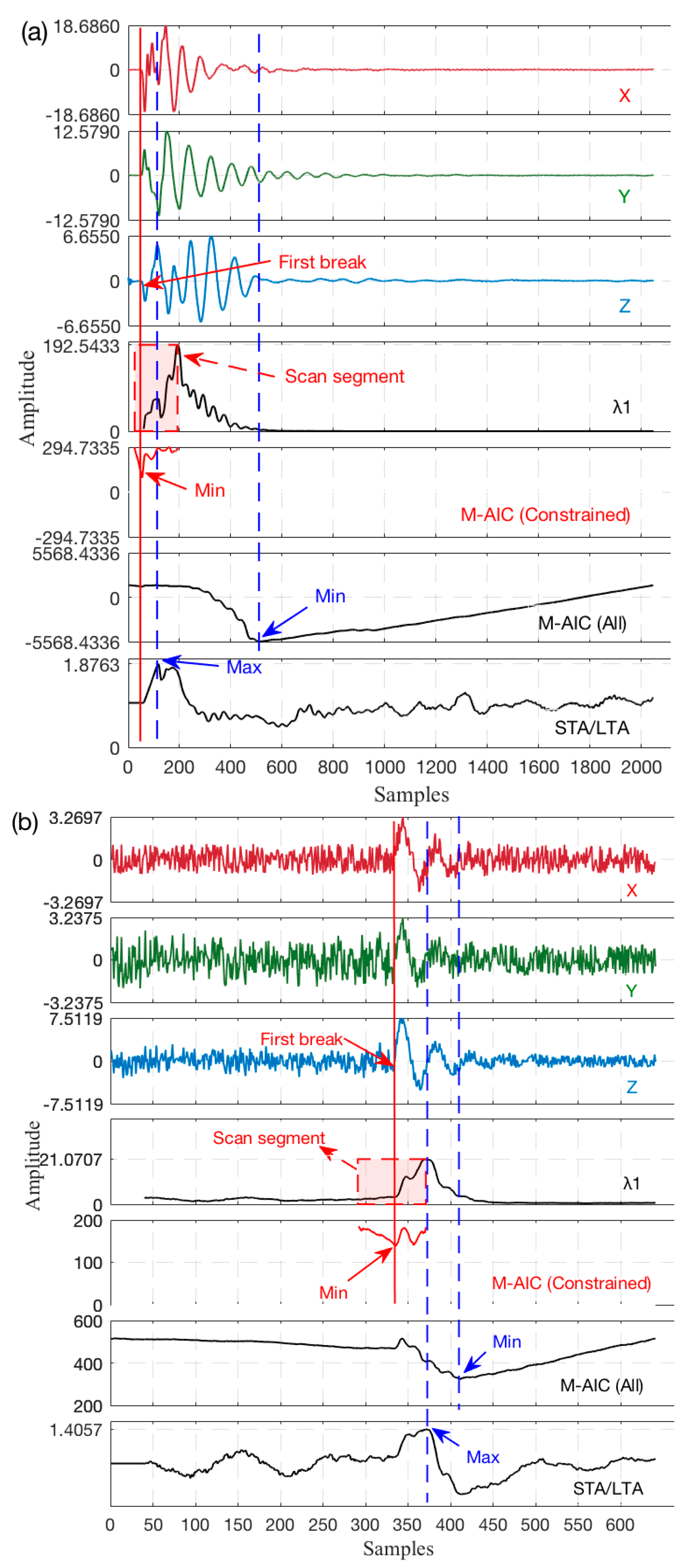
- (1)
- Selecting the scanning segment. Choosing the point which is two time windows length earlier than the location of the largest eigenvalue λ1 as the starting point by means of polarization analysis based on covariance matrix calculation, the eigenvalue λ1 can be determined based on the slope. Correspondingly, it will be seen as the end point when λ1 reaches its maximum.
- (2)
- First break picking. Directly applying the M-AIC algorithm to the established seismic data segment via step (1), then choosing the global minimum as the first break.
4. Tests and Discussion
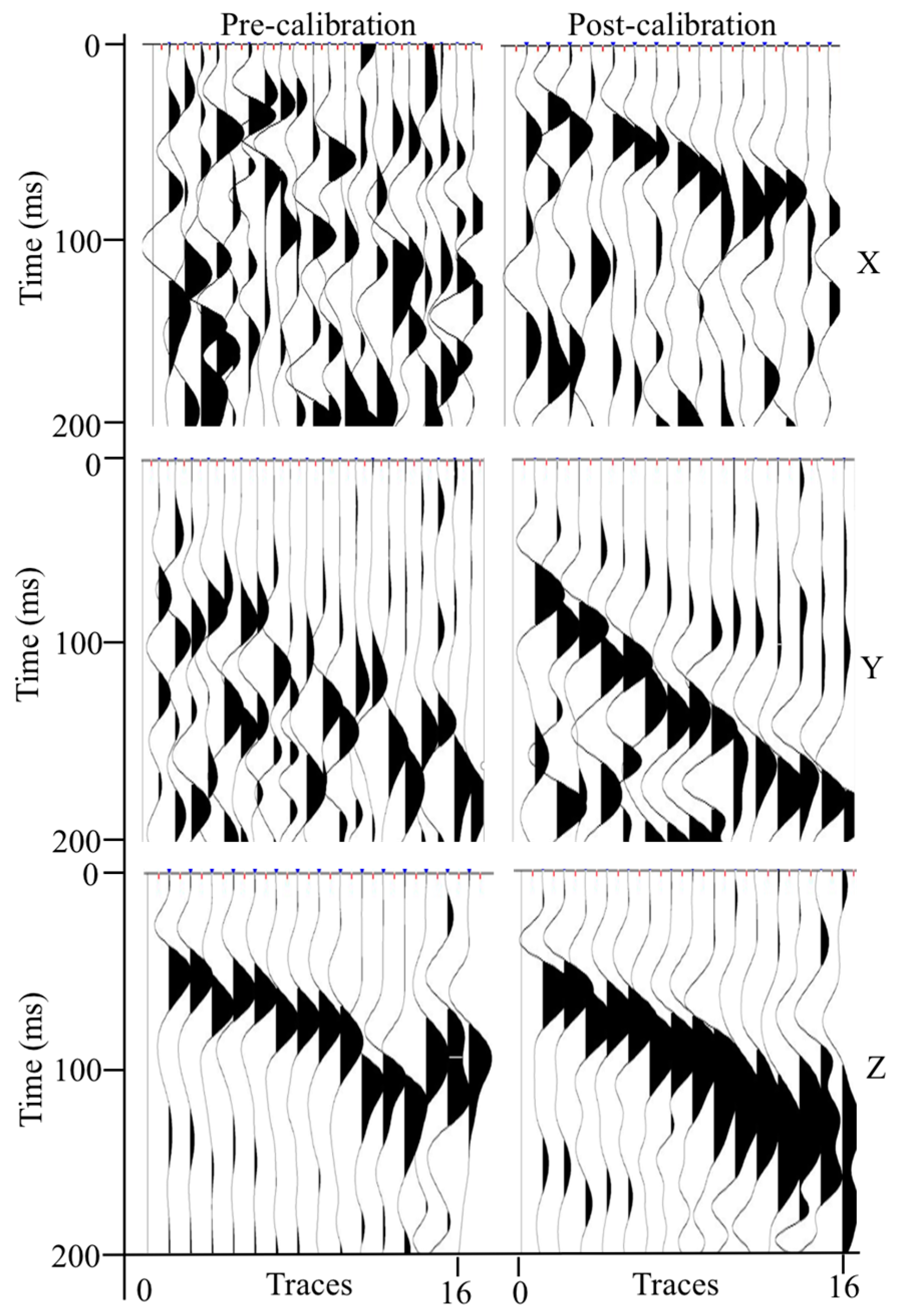
4.1. Rotation Calibration Comparison Test
4.2. Picking Algorithm Test
4.3. Field Application Test
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Blias, E. Optimization approach to automatic first arrival picking for three-component three-dimensional vertical seismic profiling data. Geophys. Prospect. 2012, 60, 1024–1029. [Google Scholar] [CrossRef]
- Akram, J.; Eaton, D.W. A review and appraisal of arrival-time picking methods fordownhole microseismic data. Geophysics 2016, 81, KS71–KS91. [Google Scholar] [CrossRef]
- Karastathis, V.; Aspiotis, T.; Tselentis, A.; Russill, N. Automatic S-Wave Picking based on Time-Frequency Analysis for Passive Seismic Applications; SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Dallas, TX, USA, 2016; pp. 2760–2764. [Google Scholar]
- Sabbione, J.I.; Velis, D. Automatic first-breaks picking: New strategies and algorithms. Geophysics 2010, 75, V67–V76. [Google Scholar] [CrossRef]
- Akram, J. Automatic P-wave arrival time picking method for seismic and micro-seismic data. In CSPG CSEG CWLS Convention; CSEG: Calgary, AB, Canada, 2011. [Google Scholar]
- Lomax, A.; Satriano, C.; Vassallo, M. Automatic picker developments and optimization: FilterPicker—A robust, broadband picker for real-time seismic monitoring and earthquake early warning. Seismol. Res. Lett. 2012, 83, 531–540. [Google Scholar] [CrossRef]
- Akaike, H. Autoregressive model fitting for control. Ann. Inst. Stat. Math. 1971, 23, 163–180. [Google Scholar] [CrossRef]
- Akaike, H. Markovian representation of stochastic processes and its application to the analysis of autoregressive moving average processes. Ann. Inst. Stat. Math. 1974, 26, 363–387. [Google Scholar] [CrossRef]
- Li, X.; Shang, X.; Morales-Esteban, A. Identifying P phase arrival of weak events: The Akaike Information Criterion picking application based on the Empirical Mode Decomposition. Comput. Geosci. 2017, 100, 57–66. [Google Scholar] [CrossRef]
- Nakamula, S.; Takeo, M.; Okabe, Y.; Matsuura, M. Automatic seismic wave arrival detection and picking with stationary analysis: Application of the KM2O-Langevin equations. Earth Planets Space 2007, 59, 567–577. [Google Scholar] [CrossRef]
- Saatçılar, R.; İnan, S.; Cankurtaranlar, A.; Duygun, F.; Demirbağ, E.; Ergintav, S.; Yılmaz, M.; Toygar, A.R.; Kösebalaban, A.; Yalçın, M.N. An environmentally-friendly integrated seismic imaging for coal exploration in the Miocene Soma Basin, Western Turkey. Int. J. Oil Gas Coal Technol. 2014, 4, 399–414. [Google Scholar]
- MacBeth, C.; Zeng, X.; Li, X.Y.; Queen, J. Multicomponent near-surface correction for land VSP data. Geophys. J. Int. 1995, 1, 301–315. [Google Scholar] [CrossRef]
- Zeng, X.; McMechan, G.A. Two methods for determining geophone orientations from VSP data. Geophysics 2006, 71, V87–V97. [Google Scholar] [CrossRef]
- D’Alessandro, A.; D’Anna, G. Retrieval of ocean bottom and downhole seismic sensors orientation using integrated MEMS gyroscope and direct rotation measurements. Adv. Geosci. 2014, 40, 11–17. [Google Scholar] [CrossRef]
- Maeda, N. A method for reading and checking phase times in auto-processing system of seismic wave data. Zisin 1985, 38, 365–379. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, S.; Liu, C.; Yuan, X.; Liu, S. A dual-linear kalman filter for real-time orientation determination system using low-cost MEMS sensors. Sensors 2016, 16, 264. [Google Scholar] [CrossRef] [PubMed]
- Jungletronics. GY-85—A Quick Datasheet Study. Available online: https://medium.com/jungletronics/gy-85-a-quick-datasheet-study-79019bb36fbf (accessed on 18 September 2017).
- Matthias, E. Arduino Implementation for GY-85 (ADXL345 Accelerometer, ITG3200 Gyroscope and HMC5883L Magnetometer). Available online: https://github.com/madc/GY-85 (accessed on 18 September 2017).
- Brunner, T.; Lauffenburger, J.P.; Changey, S.; Basset, M. Magnetometer-augmented imu simulator: In-depth elaboration. Sensors 2015, 15, 5293–5310. [Google Scholar] [CrossRef] [PubMed]
- Chiang, C.Y.; Jeng, J.T.; Lai, B.L.; Luong, V.S.; Lu, C.C. Tri-axis magnetometer with in-plane giant magnetoresistance sensors for compass application. J. Appl. Phys. 2015, 117. [Google Scholar] [CrossRef]
- Tian, J.; Yang, W.; Peng, Z.; Tang, T.; Li, Z. Application of MEMS accelerometers and gyroscopes in fast steering mirror control systems. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Bagalà, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Zijlstra, W.; Klenk, J. Evaluation of accelerometer-based fall detection algorithms on real-world falls. PLoS ONE 2012, 5, e37062. [Google Scholar] [CrossRef] [PubMed]
- Domingues, J.M.B. Quadrotor Prototype. Available online: https://fenix.tecnico.ulisboa.pt/downloadFile/395139421061/EXTENDED%20ABSTRACT.pdf (accessed on 18 September 2017).
- Crocoll, P.; Seibold, J.; Scholz, G.; Trommer, G.F. Model-aided navigation for a quadrotor helicopter: A novel navigation system and first experimental results. Navigation 2014, 61, 253–271. [Google Scholar] [CrossRef]
- Takanami, T.; Kitagawa, G. A new efficient procedure for estimation of onset times of seismic waves. J. Phys. Earth 1988, 36, 267–290. [Google Scholar] [CrossRef]
- Sleeman, R.; van Eck, T. Robust automatic P-phase picking: An online implementation in the analysis of broadband seismogram recordings. Phys. Earth Planet. Inter. 1998, 113, 265–275. [Google Scholar] [CrossRef]
- Leonard, M. Comparison of manual and automatic onset time picking. Bull. Seismol. Soc. Am. 2000, 90, 1384–1390. [Google Scholar] [CrossRef]
- Zhang, H.; Thurber, C.H.; Rowe, C.A. Automatic p-wave arrival detection and picking with multiscale wavelet analysis for single component recordings. Bull. Seismol. Soc. Am. 2003, 93, 1904–1912. [Google Scholar] [CrossRef]
- Ross, Z.E.; Ben-Zion, Y. Automatic picking of direct P, S seismic phases and fault zone head waves. Geophys. J. Int. 2014, 199, 368–381. [Google Scholar] [CrossRef]
- Baillard, C.; Crawford, W.C.; Ballu, V.; Hibert, C.; Mangeney, A. An automatic kurtosis-based P-and S-phase picker designed for local seismic networks. Bull. Seismol. Soc. Am. 2014, 104, 394–409. [Google Scholar] [CrossRef]
- Jurkevics, A. Polarization analysis of three-component array data. Bull. Seismol. Soc. Am. 1988, 78, 1725–1743. [Google Scholar]
- Kanasewich, E.R. Time Sequence Analysis in Geophysics; University of Alberta: Edmonton, AB, Canada, 1981. [Google Scholar]
- Wang, X.Z. Study on Application of Wavelet Transform in Compressing Seismic Data and Picking the Onset Time of Seismic Phase. Ph.D. Thesis, Institute of Geophysics, China Earthquake Administration, Beijing, China, 2004. [Google Scholar]
- Jin, Z.L. Micro-seismic Wave First Arrival auto Pickup and Source Location Effect Analysis. Master’s Thesis, Jilin University, Jilin, China, March 2016. (In Chinese). [Google Scholar]
- Trnkoczy, A. Understanding and Parameter Setting of STA/LTA Trigger Algorithm. Available online: http://gfzpublic.gfz-potsdam.de/pubman/item/escidoc:4097:2/component/escidoc:4098/IS_8.1_rev1.pdf (accessed on 18 September 2017).








© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Tuo, X.; Shen, T.; Wang, R.; Courtois, J.; Yan, M. A New First Break Picking for Three-Component VSP Data Using Gesture Sensor and Polarization Analysis. Sensors 2017, 17, 2150. https://doi.org/10.3390/s17092150
Li H, Tuo X, Shen T, Wang R, Courtois J, Yan M. A New First Break Picking for Three-Component VSP Data Using Gesture Sensor and Polarization Analysis. Sensors. 2017; 17(9):2150. https://doi.org/10.3390/s17092150
Chicago/Turabian StyleLi, Huailiang, Xianguo Tuo, Tong Shen, Ruili Wang, Jérémie Courtois, and Minhao Yan. 2017. "A New First Break Picking for Three-Component VSP Data Using Gesture Sensor and Polarization Analysis" Sensors 17, no. 9: 2150. https://doi.org/10.3390/s17092150
APA StyleLi, H., Tuo, X., Shen, T., Wang, R., Courtois, J., & Yan, M. (2017). A New First Break Picking for Three-Component VSP Data Using Gesture Sensor and Polarization Analysis. Sensors, 17(9), 2150. https://doi.org/10.3390/s17092150