Energy Harvesting Hybrid Acoustic-Optical Underwater Wireless Sensor Networks Localization



Abstract
:1. Introduction
- A novel hybrid acoustic-optical underwater wireless sensor network localization technique is proposed in order to benefit from the advantages of both acoustic and optical communication.
- A weighted multiple observations paradigm is proposed for hybrid estimated distances to suppress the noisy observations and give more importance to accurate observations. Considering the hybrid acoustic and optical RSS model, the closed form solution for Cramer–Rao lower bound (CRLB) is also derived to improve the localization accuracy of the proposed technique.
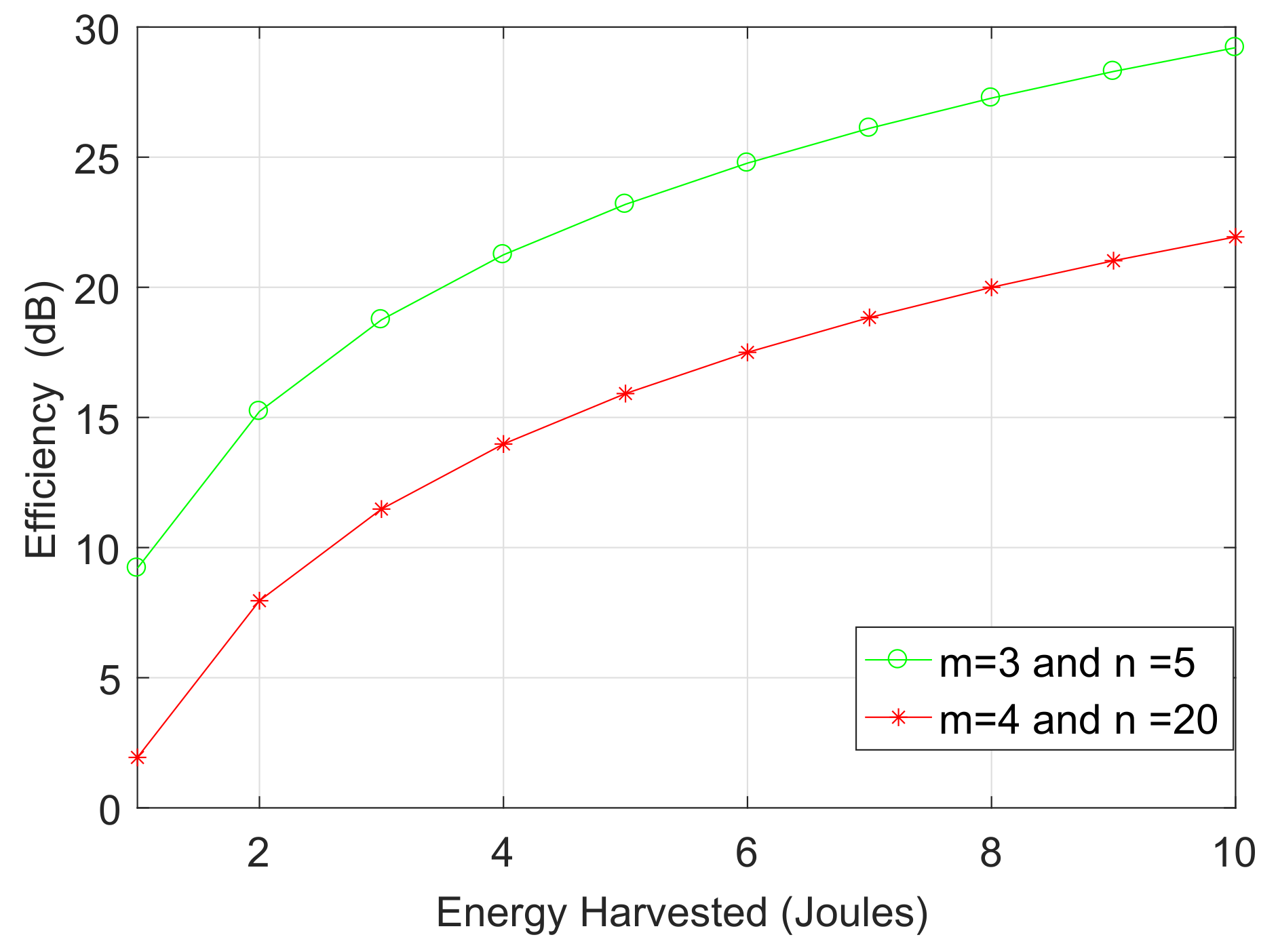
- We consider energy harvesting for the battery limited sensor nodes and show the impact of harvested energy on the network lifetime maximization and energy efficiency.
1.1. Notations and Symbols
1.2. Paper Organization
2. System Model and Proposed Technique
2.1. System Model
- Step 1: The sensor nodes sweep the neighboring region using the optical channel and find the ranges to its neighbors.
- Step 2: Nodes which are not within the reach of an optical channel are communicated by using the acoustic channel and computes the acoustic ranges.
- Step 3: The surface buoy fuses the optical and acoustic ranges to compute the pairwise estimated distance matrix and applies a weighted multiple observation dimensionality reduction to find out the location of each sensor node.
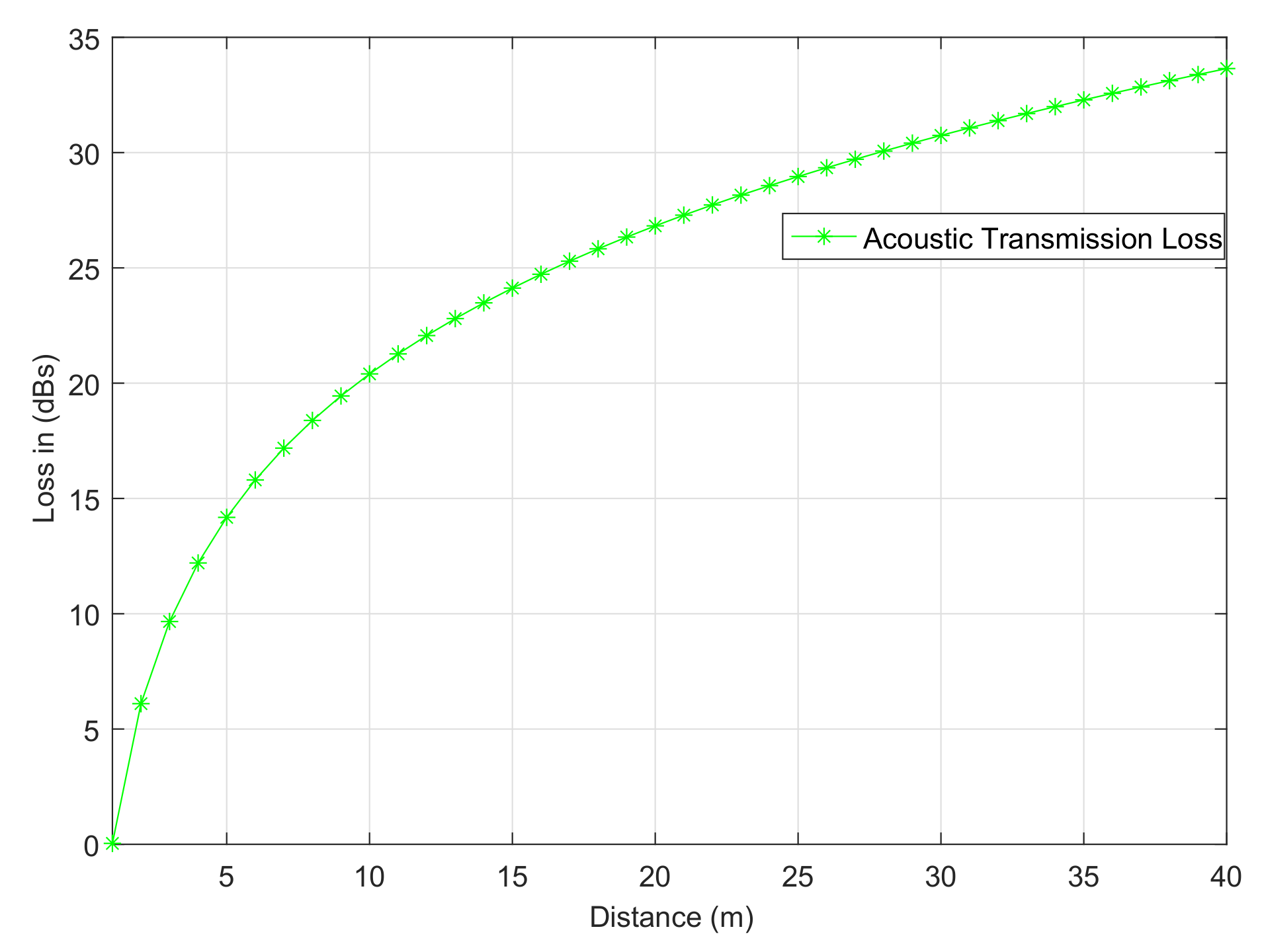
2.2. Acoustic Underwater Ranging
2.3. Optical Underwater Ranging
2.4. Proposed Localization Technique
2.4.1. Updating for fixed
2.4.2. Updating for Fixed
2.4.3. Impact of Energy Harvesting on Localization Performance
2.4.4. Complexity Analysis of the Proposed Technique
3. Performance Analysis
4. Numerical Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- NRDC. Manmade Noises Can Drown out the Sounds That Whales and Other Marine Mammals Rely on for Life’s Most Basic Functions from Navigating to Mating; Technical Report; NRDC: New York, NY, USA, 2017. [Google Scholar]
- Yao, G.; Jin, Z.; Su, Y. An environment-friendly spectrum decision strategy for underwater acoustic networks. J. Netw. Comput. Appl. 2016, 73, 82–93. [Google Scholar] [CrossRef]
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A Survey of Underwater Optical Wireless Communications. IEEE Commun. Surv. Tutor. 2017, 19, 204–238. [Google Scholar] [CrossRef]
- Chaplin, M. Water Absorption Spectrum. Available online: http://www1.lsbu.ac.uk/water/water_vibrational_spectrum.html (accessed 20 August 2017).
- Duntley, S.Q. Light in the Sea. J. Opt. Soc. Am. 1963, 53, 214–233. [Google Scholar] [CrossRef]
- Gilbert, G.D.; Stoner, T.R.; Jernigan, J.L. Underwater Experiments on The Polarization, Coherence, and Scattering Properties of A Pulsed Blue-Green Laser. Proc. SPIE 1966, 0007, 7–14. [Google Scholar]
- Ahmadi, A.; Shojafar, M.; Hajeforosh, S.F.; Dehghan, M.; Singhal, M. An efficient routing algorithm to preserve k-coverage in wireless sensor networks. J. Supercomput. 2014, 68, 599–623. [Google Scholar] [CrossRef]
- Smaragdakis, G.; Matta, I.; Bestavros, A. SEP: A Stable Election Protocol for clustered heterogeneous wireless sensor networks. In Proceedings of the Second International Workshop on Sensor and Actuator Network Protocols and Applications (SANPA ’04), Boston, MA, USA, 22 August 2004. [Google Scholar]
- Naranjo, P.G.V.; Shojafar, M.; Mostafaei, H.; Pooranian, Z.; Baccarelli, E. P-SEP: A prolong stable election routing algorithm for energy-limited heterogeneous fog-supported wireless sensor networks. J. Supercomput. 2017, 73, 733–755. [Google Scholar] [CrossRef]
- Ahmad, A.; Ahmed, S.; Imran, M.; Alam, M.; Niaz, I.A.; Javaid, N. On energy efficiency in underwater wireless sensor networks with cooperative routing. Ann. Telecommun. 2017, 72, 173–188. [Google Scholar] [CrossRef]
- Khizar, M.; Wahid, A.; Pervaiz, K.; Sajid, M.; Qasim, U.; Khan, Z.A.; Javaid, N. Enhanced Energy Efficient Depth Based Routing Protocol for Underwater WSNs. In Proceedings of the 2016 10th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS), Fukuoka, Japan, 6–8 July 2016; pp. 70–77. [Google Scholar]
- Tuna, G.; Gungor, V.C. A survey on deployment techniques, localization algorithms, and research challenges for underwater acoustic sensor networks. Int. J. Commun. Syst. 2017, 30, 1–21. [Google Scholar] [CrossRef]
- Li, H.; Tian, C.; Lu, J.; Myjak, M.J.; Martinez, J.J.; Brown, R.S.; Deng, Z.D. An Energy Harvesting Underwater Acoustic Transmitter for Aquatic Animal. Nat. Sci. Rep. 2016, 6, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Srujana, B.S.; Mathews, P.; Harigovindan, V. Multi-source Energy Harvesting System for Underwater Wireless Sensor Networks. Procedia Comput. Sci. 2015, 46, 1041–1048. [Google Scholar] [CrossRef]
- Chandrasekhar, V.; Seah, W. An Area Localization Scheme for Underwater Sensor Networks. In Proceedings of the Asia Pacific OCEANS, Singapore, 16–19 May 2007; pp. 1–8. [Google Scholar]
- Bian, T.; Venkatesan, R.; Li, C. Design and Evaluation of a New Localization Scheme for Underwater Acoustic Sensor Networks. In Proceedings of the IEEE GLOBECOM, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–5. [Google Scholar]
- Liu, B.; Chen, H.; Zhong, Z.; Poor, H.V. Asymmetrical Round Trip Based Synchronization-Free Localization in Large-Scale Underwater Sensor Networks. IEEE Trans. Wirel. Commun. 2010, 9, 3532–3542. [Google Scholar] [CrossRef]
- Teymorian, A.Y.; Cheng, W.; Ma, L.; Cheng, X.; Lu, X.; Lu, Z. 3D Underwater Sensor Network Localization. IEEE Trans. Mob. Comput. 2009, 8, 1610–1621. [Google Scholar] [CrossRef]
- Zhou, Z.; Cui, J.H.; Zhou, S. Efficient localization for large-scale underwater sensor networks. Ad Hoc Netw. 2010, 8, 267–279. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, R.; Li, Z.; Cheng, C.; Zhang, K. Improved reverse localization schemes for underwater wireless sensor networks: Poster abstract. In Proceedings of the 16th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN 2017), Pittsburgh, PA, USA, 18–21 April 2017; pp. 323–324. [Google Scholar]
- Erol-Kantarci, M.; Mouftah, H.T.; Oktug, S. A Survey of Architectures and Localization Techniques for Underwater Acoustic Sensor Networks. IEEE Commun. Surv. Tutor. 2011, 13, 487–502. [Google Scholar] [CrossRef]
- Tan, H.P.; Diamant, R.; Seah, W.K.; Waldmeyer, M. A survey of techniques and challenges in underwater localization. Ocean Eng. 2011, 38, 1663–1676. [Google Scholar] [CrossRef]
- Hosseini, M. New Hybrid RSS-based Localization Mechanism For Underwater Wireless Sensor Networks. Int. J. Comput. Commun. Netw. (IJCCN) 2011, 1, 1–10. [Google Scholar]
- Rushworth, A. A Review of: “Underwater Acoustic System Analysis”. Int. J. Remote Sens. 1985, 6, 365–366. [Google Scholar] [CrossRef]
- Etter, P. Recent Advances In Underwater Acoustic Modeling And Simulation. J. Sound Vib. 2001, 240, 351–383. [Google Scholar] [CrossRef]
- Thorp, W.H. Analytic Description of the Low Frequency Attenuation Coefficient. J. Acoust. Soc. Am. 1967, 42, 270. [Google Scholar] [CrossRef]
- Corless, R.M.; Gonnet, G.H.; Hare, D.E.G.; Jeffrey, D.J.; Knuth, D.E. On the Lambert W function. Adv. Comput. Math. 1996, 5, 329–359. [Google Scholar] [CrossRef]
- Akhoundi, F.; Minoofar, A.; Salehi, J.A. Underwater positioning system based on cellular underwater wireless optical CDMA networks. In Proceedings of the Wireless and Optical Communication Conference (WOCC), Newark, NJ, USA, 7–8 April 2017; pp. 1–3. [Google Scholar]
- Shifrin, K. Physical Optics of Ocean Water; AIP Press: New York, NY, USA, 1998. [Google Scholar]
- Arnon, S.; Kedar, D. Non-line-of-sight underwater optical wireless communication network. J. Opt. Soc. Am. A 2009, 26, 530–539. [Google Scholar] [CrossRef]
- Watson, G. Computing Helmert transformations. J. Comput. Appl. Math. 2006, 197, 387–394. [Google Scholar] [CrossRef]
- Schwartz, E.L.; Shaw, A.; Wolfson, E. A numerical solution to the generalized mapmaker’s problem: Flattening nonconvex polyhedral surfaces. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 1005–1008. [Google Scholar] [CrossRef]
- Tenenbaum, J.B.; de Silva, V.; Langford, J.C. A Global Geometric Framework for Nonlinear Dimensionality Reduction. Science 2000, 290, 2319–2323. [Google Scholar] [CrossRef] [PubMed]
- Larsson, E. Cramer-Rao bound analysis of distributed positioning in sensor networks. IEEE Signal Process. Lett. 2004, 11, 334–337. [Google Scholar] [CrossRef]
- Rajawat, K.; Kumar, S. Stochastic Multidimensional Scaling. IEEE Trans. Signal Inf. Process. Netw. 2017, 3, 360–375. [Google Scholar] [CrossRef]
- Laufer, B.; Talmon, R.; Gannot, S. Semi-supervised Sound Source Localization Based on Manifold Regularization. IEEE/ACM Trans. Audio Speech Lang. Process. 2016, 24, 1393–1407. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | EM Waves | Acoustic Waves | Optical Waves |
|---|---|---|---|
| Communication Distance | 100 m | Upto 20 Km | 10–100 m |
| Transmit Power | Few mW to Hundred of Watts | 10–100 W | Few Watts |
| Cost | High | High | Low |
| Data Rate | Up to 100 Mbps | In Kbps | Up to Gbps |
| Symbol | Variable | Symbol | Variable |
|---|---|---|---|
| m | Number of anchor nodes | Noise variance | |
| n | Number of sensor nodes | Divergence angle | |
| Spherical spreading loss | T | Time duration | |
| Cylindrical spreading loss | Actual two-dimensional location of a node | ||
| Absorption coefficient | Matrix of Estimated distances | ||
| Euclidean distance | Weighting coefficients | ||
| Estimated distance | Importance of an observation | ||
| Wavelength | Controlling parameter | ||
| Extinction coefficient | Actual locations of all the nodes | ||
| Number of photons | Estimated locations of all the nodes | ||
| Propagation loss | Scaling factor | ||
| Received power at node j | Rotation factor | ||
| Transmitted power by node i | Translation factor | ||
| Optical efficiencies | Energy consumption | ||
| Trajectory angle | Noise co-variance matrix | ||
| r | Transmission range | Mean square error | |
| Estimated acoustic distance | Estimated optical distance |
| Observations | m | n | Error Function | |
|---|---|---|---|---|
| 1st | 3 | 5 | 1.77 m | 0.11 |
| 2nd | 3 | 5 | 0.56 m | 0.01 |
| 3rd | 3 | 5 | 0.17 m | 0.001 |
| 4th | 3 | 5 | 0.05 m | 2.3 |
| Multiple | 3 | 5 | - | 2.3 |
| Observations | m | n | Error Function | |
|---|---|---|---|---|
| 1st | 4 | 20 | 1.56 m | 0.19 |
| 2nd | 4 | 20 | 0.49 m | 0.06 |
| 3rd | 4 | 20 | 0.15 m | 0.018 |
| 4th | 4 | 20 | 0.04 m | 0.0036 |
| Multiple | 4 | 20 | - | 9.6 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.-S. Energy Harvesting Hybrid Acoustic-Optical Underwater Wireless Sensor Networks Localization. Sensors 2018, 18, 51. https://doi.org/10.3390/s18010051
Saeed N, Celik A, Al-Naffouri TY, Alouini M-S. Energy Harvesting Hybrid Acoustic-Optical Underwater Wireless Sensor Networks Localization. Sensors. 2018; 18(1):51. https://doi.org/10.3390/s18010051
Chicago/Turabian StyleSaeed, Nasir, Abdulkadir Celik, Tareq Y. Al-Naffouri, and Mohamed-Slim Alouini. 2018. "Energy Harvesting Hybrid Acoustic-Optical Underwater Wireless Sensor Networks Localization" Sensors 18, no. 1: 51. https://doi.org/10.3390/s18010051
APA StyleSaeed, N., Celik, A., Al-Naffouri, T. Y., & Alouini, M. -S. (2018). Energy Harvesting Hybrid Acoustic-Optical Underwater Wireless Sensor Networks Localization. Sensors, 18(1), 51. https://doi.org/10.3390/s18010051