Background Registration-Based Adaptive Noise Filtering of LWIR/MWIR Imaging Sensors for UAV Applications

Abstract
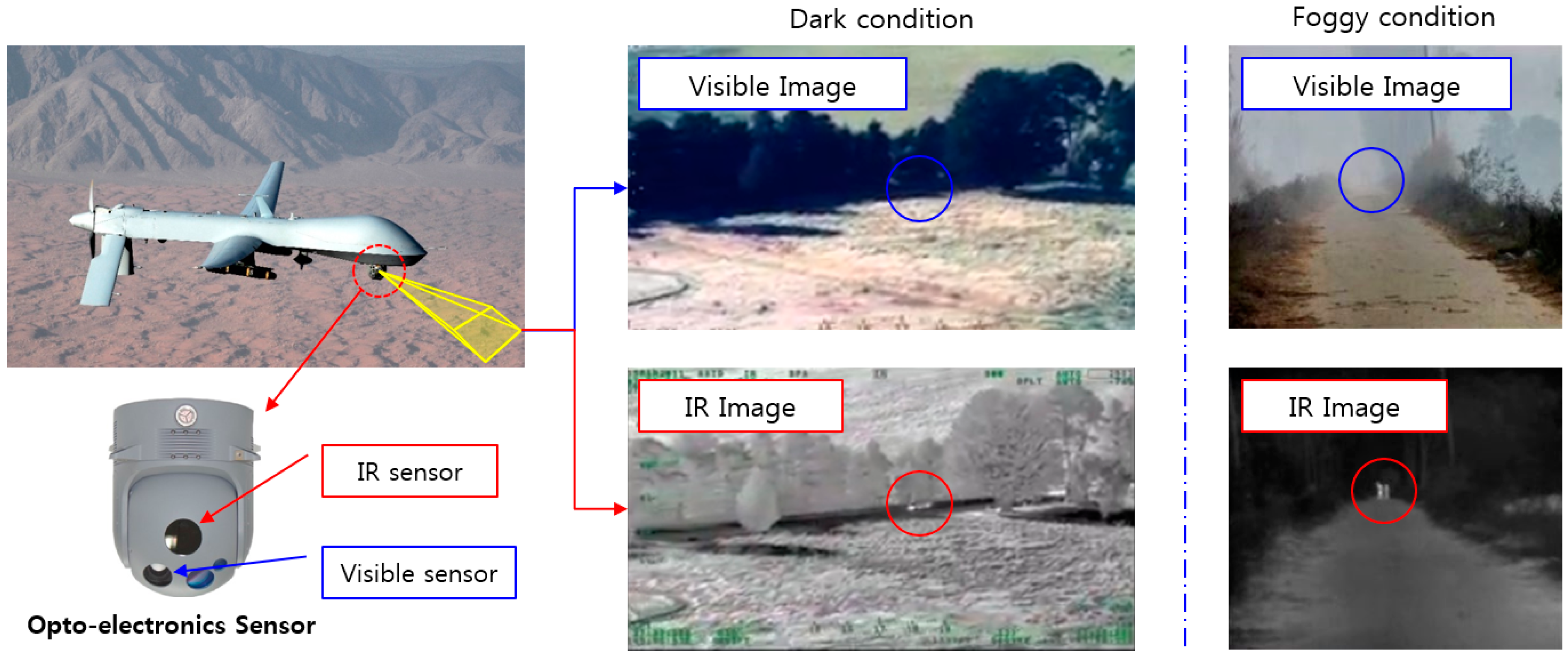
:1. Introduction
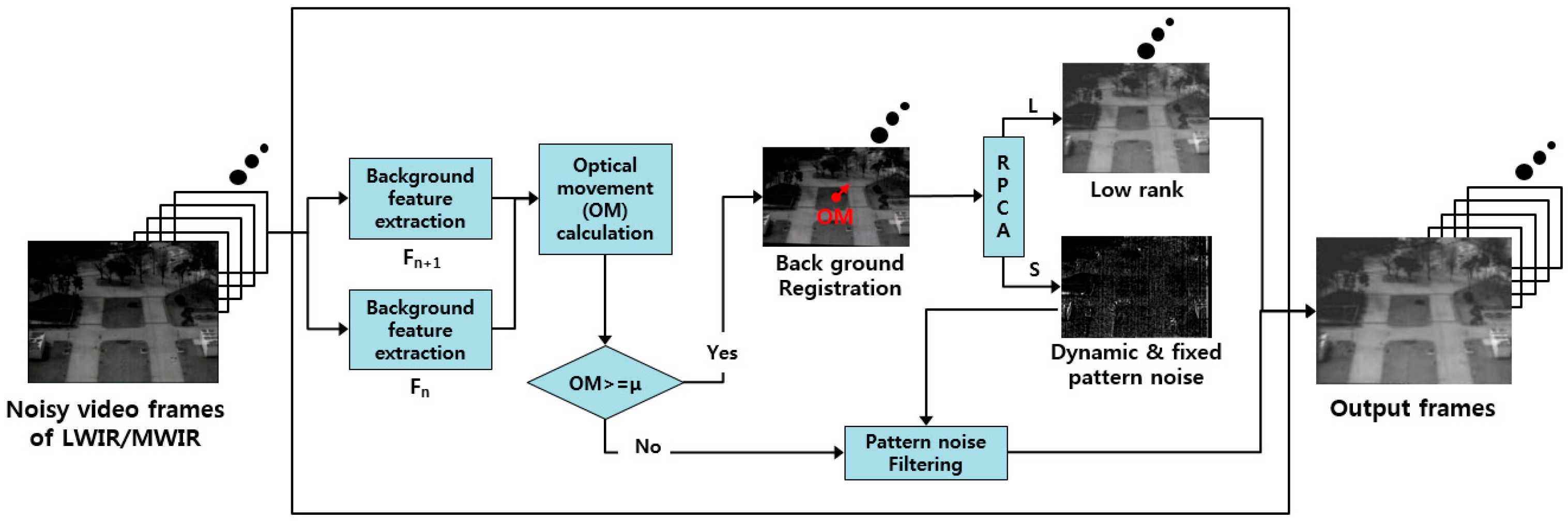
2. Proposed Background Registration-Based Adaptive Noise Filtering Method
| Algorithm 1. Background Registration-Based Adaptive Noise Filtering | ||||||
| ||||||


3. Quantitative Evaluation Method
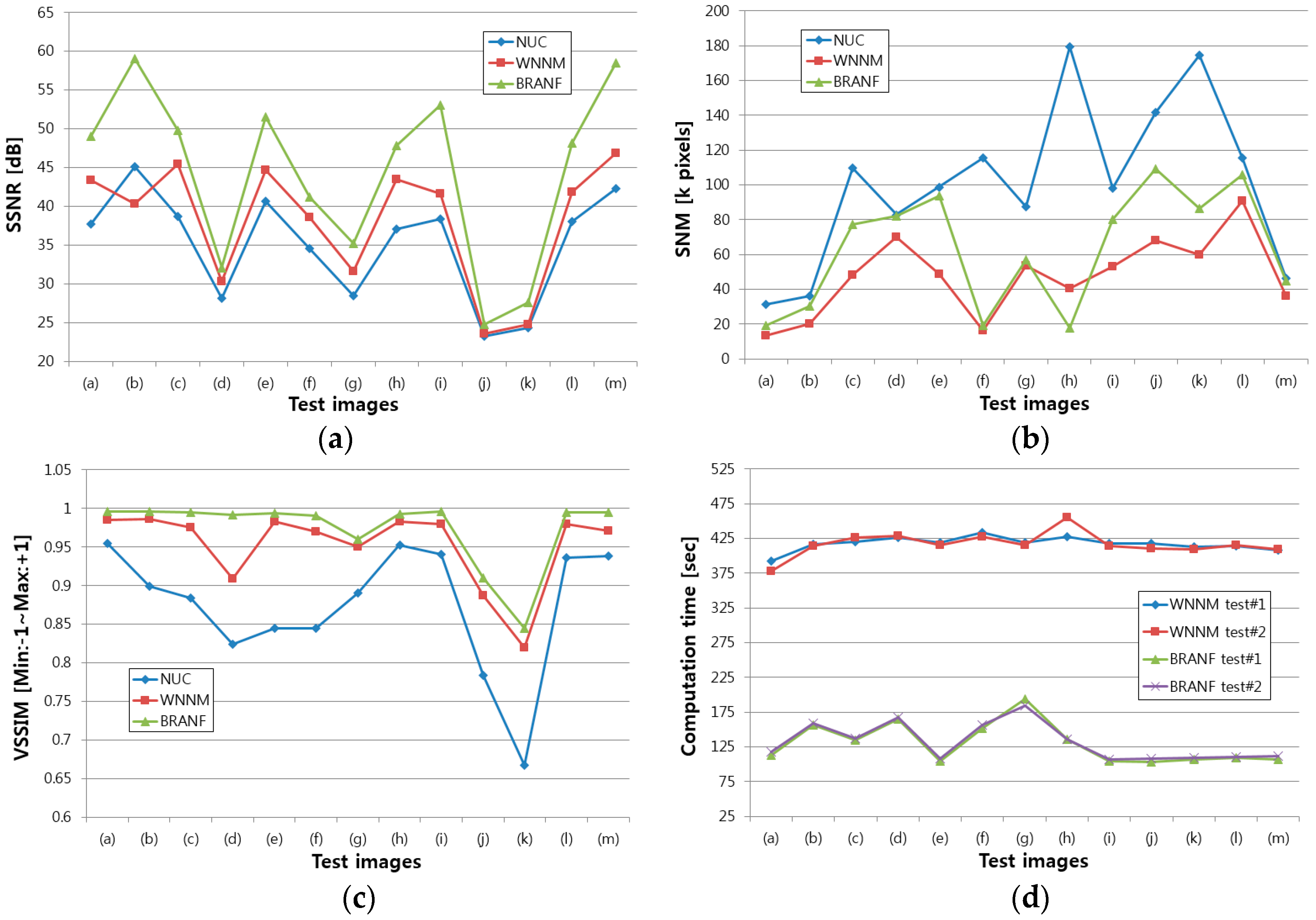
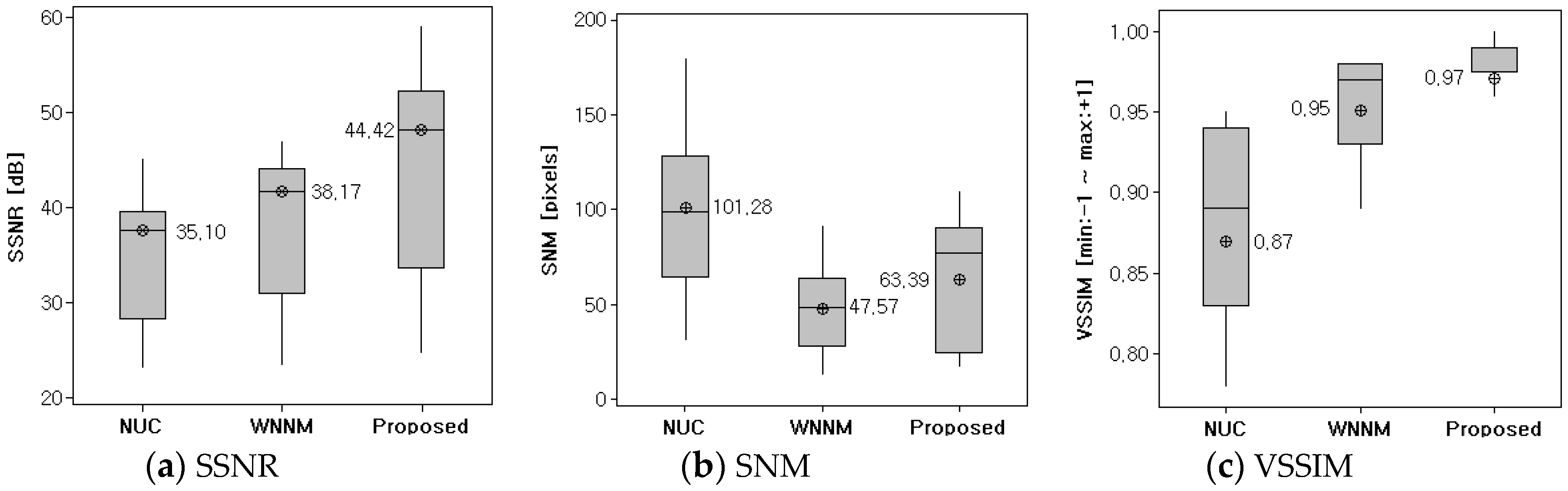
3.1. SSNR Index
3.2. SNM Index
3.3. VSSIM Index
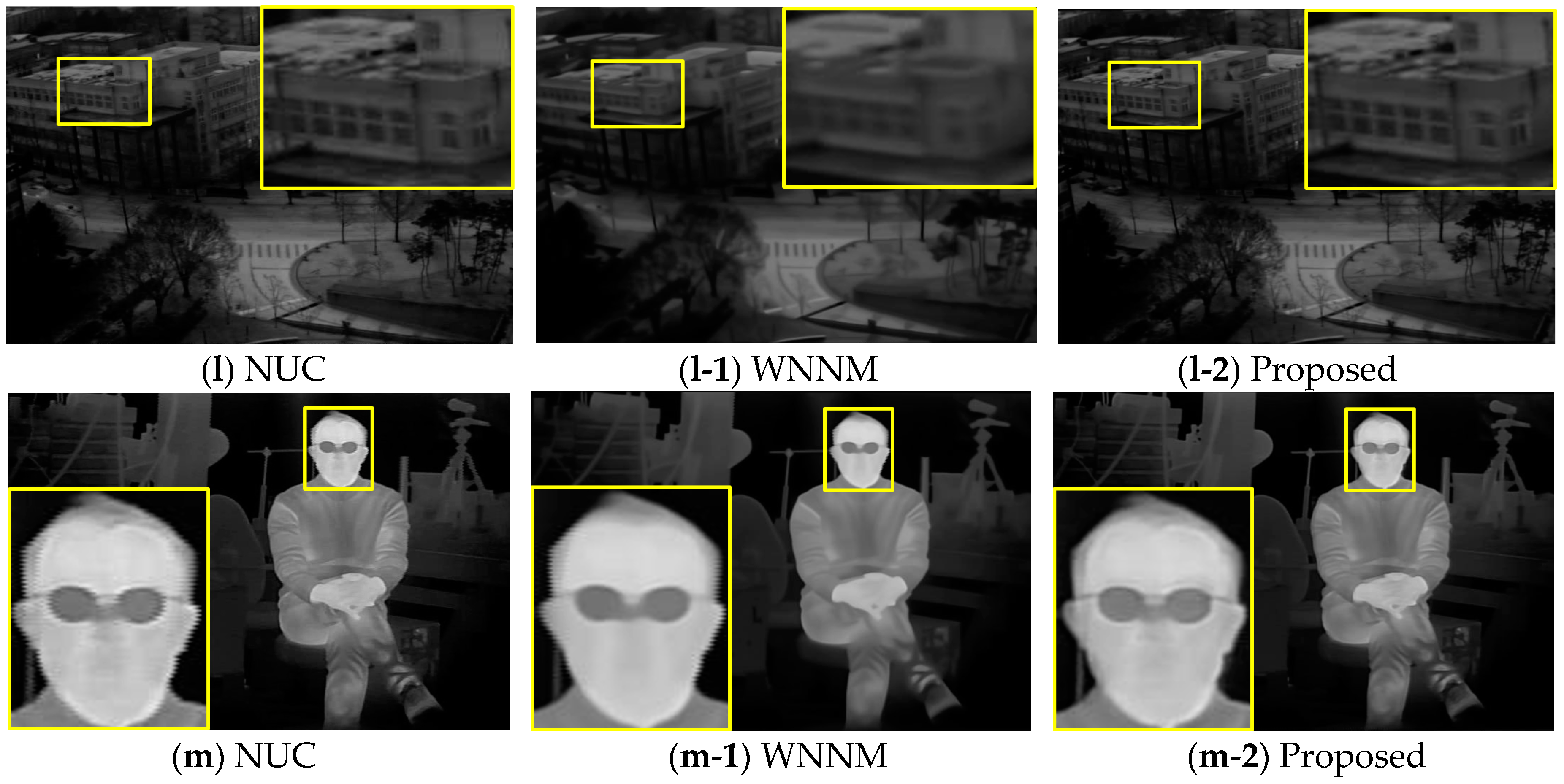
4. Experimental Results and Analysis
5. Conclusions
Supplementary Materials
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ma, J.; Chen, C.; Li, C.; Huang, J. Infrared and visible image fusion via gradient transfer and total variation minimization. Inf. Fusion 2016, 31, 100–109. [Google Scholar] [CrossRef]
- Wescam. Available online: http://www.wescam.com/index.php (accessed on 15 July 2016).
- Liu, X.; Lu, X.; Shen, H.; Yuan, Q.; Jiao, Y.; Zhang, L. Stripe Noise Separation and Removal in Remote Sensing Images by Consideration of the Global Sparsity and Local Variational Properties. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3049–3060. [Google Scholar] [CrossRef]
- Yuan, Q.; Zhang, L.; Shen, H. Hyperspectral image denoising employing a spectral–spatial adaptive total variation model. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3660–3677. [Google Scholar] [CrossRef]
- Mudau, A.E.; Willers, C.J.; Griffith, D.; Roux, F.P. Non-uniformity correction and bad pixel replacement on LWIR and MWIR images. In Proceedings of the IEEE Saudi International Electronics, Communications and Photonics Conference (SIECPC), Riyadh, Saudi Arabia, 24–26 April 2011; pp. 1–5. [Google Scholar]
- Ratliff, B.M.; Kaufman, J.R. Scene-based correction of fixed pattern noise in hyperspectral image data using temporal reordering. Opt. Eng. 2015, 54, 093102. [Google Scholar] [CrossRef]
- Boutemedjet, A.; Deng, C.; Zhao, B. Robust Approach for Nonuniformity Correction in Infrared Focal Plane Array. Sensors 2016, 16, 1890. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Yang, M.Y.; Tisse, C.L. Effective Strip Noise Removal for Low-Textured Infrared Images Based on 1-D Guided Filtering. IEEE Trans. Circuits Syst. Video Technol. 2016, 26, 2176–2188. [Google Scholar] [CrossRef]
- Kim, M.Y.; Velubolu, K.C.; Lee, S.G. Lateral scanning linnik interferometry for large field of view and fast scanning: Wafer bump inspection. Int. J. Optomech. 2011, 5, 271–285. [Google Scholar] [CrossRef]
- Chang-Yan, C.; Ji-Xian, Z.; Zheng-Jun, L. Study on Methods of Noise Reduction in a Stripped Image. ISPRS 2008, XXXVII, 213–216. [Google Scholar]
- Tendero, T.; Landeau, S.; Gilles, J. Non-uniformity correction of infrared images by midway equalization. Image Process. Line 2012, 2, 134–146. [Google Scholar] [CrossRef]
- Kim, S. Two-point correction and minimum filter-based nonuniformity correction for scan-based aerial infrared cameras. Opt. Eng. 2012, 51, 106401. [Google Scholar] [CrossRef]
- Hardie, R.C.; Hayat, M.M.; Armstrong, E.; Yasuda, B. Scene-based nonuniformity correction with video sequences and registration. Appl. Opt. 2000, 39, 1241–1250. [Google Scholar] [CrossRef] [PubMed]
- Black, W.T.; Tyo, J.S. Feedback-integrated scene cancellation scene-based nonuniformity correction algorithm. J. Electron. Imaging 2014, 23, 023005. [Google Scholar] [CrossRef]
- Gu, S.; Xie, Q.; Meng, D.; Zuo, W.; Feng, X.; Zhang, L. Weighted nuclear norm minimization and its applications to low level vision. Int. J. Comput. Vis. 2017, 121, 183–208. [Google Scholar] [CrossRef]
- D’Andrès, L.; Salvador, J.; Kochale, A.; Süsstrunk, S. Non-Parametric Blur Map Regression for Depth of Field Extension. IEEE Trans. Image Process. 2016, 25, 1660–1673. [Google Scholar] [CrossRef] [PubMed]
- Tomasi, C.; Kanade, T. Detection and Tracking of Point Features. Pattern Recognit. 2004, 37, 165–168. [Google Scholar]
- Bouwmans, T.; Sobral, A.; Javed, S.; Jung, S.K.; Zahzah, E.H. Decomposition into low-rank plus additive matrices for background/foreground separation: A review for a comparative evaluation with a large-scale dataset. Comput. Sci. Rev. 2017, 23, 1–71. [Google Scholar] [CrossRef]
- Zhang, H.; He, W.; Zhang, L.; Shen, H.; Yuan, Q. Hyperspectral image restoration using low-rank matrix recovery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4729–4743. [Google Scholar] [CrossRef]
- Candès, E.J.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis. J. ACM 2011, 58, 11. [Google Scholar] [CrossRef]
- Gao, Z.; Cheong, L.F.; Shan, M. Block-sparse RPCA for consistent foreground detection. In Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 690–703. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning, 8th ed.; Springer: Cambridge, UK, 2007; pp. 561–586. [Google Scholar]
- He, W.; Zhang, H.; Zhang, L.; Shen, H. Total-variation-regularized low-rank matrix factorization for hyperspectral image restoration. IEEE Trans. Geosci. Remote Sens. 2016, 54, 178–188. [Google Scholar] [CrossRef]
- Tsai, F.; Chen, W.W. Striping noise detection and correction of remote sensing images. IEEE Trans. Geosci. Remote Sens. 2008, 46, 4122–4131. [Google Scholar] [CrossRef]
- Liu, X.; Shen, H.; Yuan, Q.; Lu, X.; Zhou, C. A Universal Destriping Framework Combining 1-D and 2-D Variational Optimization Methods. IEEE Trans. Geosci. Remote Sens. 2017. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Noise Types | Examples | Noise Filtering Methods (O: Perfect, : Partial, X: Incomplete Solutions) | |||||
|---|---|---|---|---|---|---|---|---|
| NUC [2] | TPC [4] | SBNUC [5] | FiSC [6] | WNNM [16] | Proposed | |||
| Fixed pattern (grid, cloud, etc.) |  | O | O | O | O | O | O | |
| Basic Types of Noise | Shading phenomenon |  | O | O | O | O | O | O |
| Dead pixels |  | O | O | O | O | O | O | |
| ① Moving dots and lines |  | X | △ | O | X | O | O | |
| Problematic Noise | ② Wavefront abberation |  | X | X | X | X | X | O |
| ③ Long term variant (LTV) fixed pattern noise |  | X | △ | △ | △ | △ | O | |
| Methods | Summary Description | Advantage | Disadvantage |
|---|---|---|---|
| NUC [2] | One reference method using black body |
|
|
| TPC [4] | Two reference method using built-in thermal electric coolers (TECs) |
|
|
| SBNUC [5] | Background motion and sequence-based nonuniformity correction |
|
|
| FiSC [6] | Uniformity correction based on time shift estimate of two frames |
|
|
| WNNM [16] | Low rank-based image noise reduction methods |
|
|
| Proposed BRANF | Dynamic, abberation, and long-term variable noise reduction using adaptive filtering algorithms |
|
|
| LWIR/ MWIR1 (Targets) | Images (Figure 10 and Figure 11) | Noise Types | SSNR (↑) | SNM (↓) | VSSIM (↑) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| NUC [2] | WNNM [16] | Proposed | NUC | WNNM | Proposed | NUC | WNNM | Proposed | |||
| MWIR (Room) | (a) | Lines, dots | 37.65 | 43.31 | 48.98 | 31.44 | 13.48 | 19.39 | 0.95 | 0.98 | 1.00 |
| MWIR (Room) | (b) | Lines | 45.10 | 40.30 | 59.00 | 36.30 | 20.00 | 30.54 | 0.89 | 0.98 | 0.99 |
| LWIR (Field) | (c) | Oblique lines | 38.68 | 45.44 | 49.75 | 109.63 | 48.05 | 77.34 | 0.88 | 0.97 | 0.99 |
| MWIR (Field) | (d) | Wavefront aberration | 28.12 | 30.29 | 32.08 | 82.82 | 69.91 | 82.14 | 0.82 | 0.91 | 0.99 |
| MWIR (Field) | (e) | Wavefront aberration | 40.62 | 44.66 | 51.49 | 98.79 | 48.65 | 93.85 | 0.84 | 0.98 | 0.99 |
| LWIR (Field) | (f) | LTV lines | 34.51 | 38.60 | 41.15 | 115.37 | 16.50 | 19.38 | 0.84 | 0.97 | 0.99 |
| MWIR (Wide FOV2) | (g) | Oblique lines | 28.40 | 31.56 | 35.20 | 87.49 | 53.54 | 56.83 | 0.89 | 0.95 | 0.96 |
| MWIR (Narrow FOV) | (h) | Oblique lines | 37.08 | 43.42 | 47.82 | 179.17 | 40.34 | 17.94 | 0.95 | 0.98 | 0.99 |
| LWIR (Field) | (i) | LTV lines | 38.36 | 41.64 | 53.04 | 97.90 | 52.89 | 80.24 | 0.94 | 0.98 | 0.99 |
| LWIR (Field) | (j) | LTV lines | 23.26 | 23.53 | 24.75 | 141.67 | 68.17 | 109.14 | 0.78 | 0.89 | 0.91 |
| LWIR (Field) | (k) | Severe lines | 24.31 | 24.73 | 27.53 | 174.48 | 59.83 | 86.58 | 0.66 | 0.82 | 0.84 |
| LWIR (Field) | (l) | Less lines | 38.05 | 41.86 | 48.13 | 115.50 | 91.03 | 105.91 | 0.93 | 0.98 | 0.99 |
| LWIR (Room) | (m) | Jitters | 42.27 | 46.86 | 58.51 | 46.06 | 36.08 | 44.77 | 0.94 | 0.97 | 0.99 |
 : the best performance of each measurement.
: the best performance of each measurement.© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, B.H.; Kim, M.Y.; Chae, Y.S. Background Registration-Based Adaptive Noise Filtering of LWIR/MWIR Imaging Sensors for UAV Applications. Sensors 2018, 18, 60. https://doi.org/10.3390/s18010060
Kim BH, Kim MY, Chae YS. Background Registration-Based Adaptive Noise Filtering of LWIR/MWIR Imaging Sensors for UAV Applications. Sensors. 2018; 18(1):60. https://doi.org/10.3390/s18010060
Chicago/Turabian StyleKim, Byeong Hak, Min Young Kim, and You Seong Chae. 2018. "Background Registration-Based Adaptive Noise Filtering of LWIR/MWIR Imaging Sensors for UAV Applications" Sensors 18, no. 1: 60. https://doi.org/10.3390/s18010060
APA StyleKim, B. H., Kim, M. Y., & Chae, Y. S. (2018). Background Registration-Based Adaptive Noise Filtering of LWIR/MWIR Imaging Sensors for UAV Applications. Sensors, 18(1), 60. https://doi.org/10.3390/s18010060