Electrostatic Sensor Application for On-Line Monitoring of Wind Turbine Gearboxes

Abstract
:1. Introduction
2. The Electrostatic Sensor
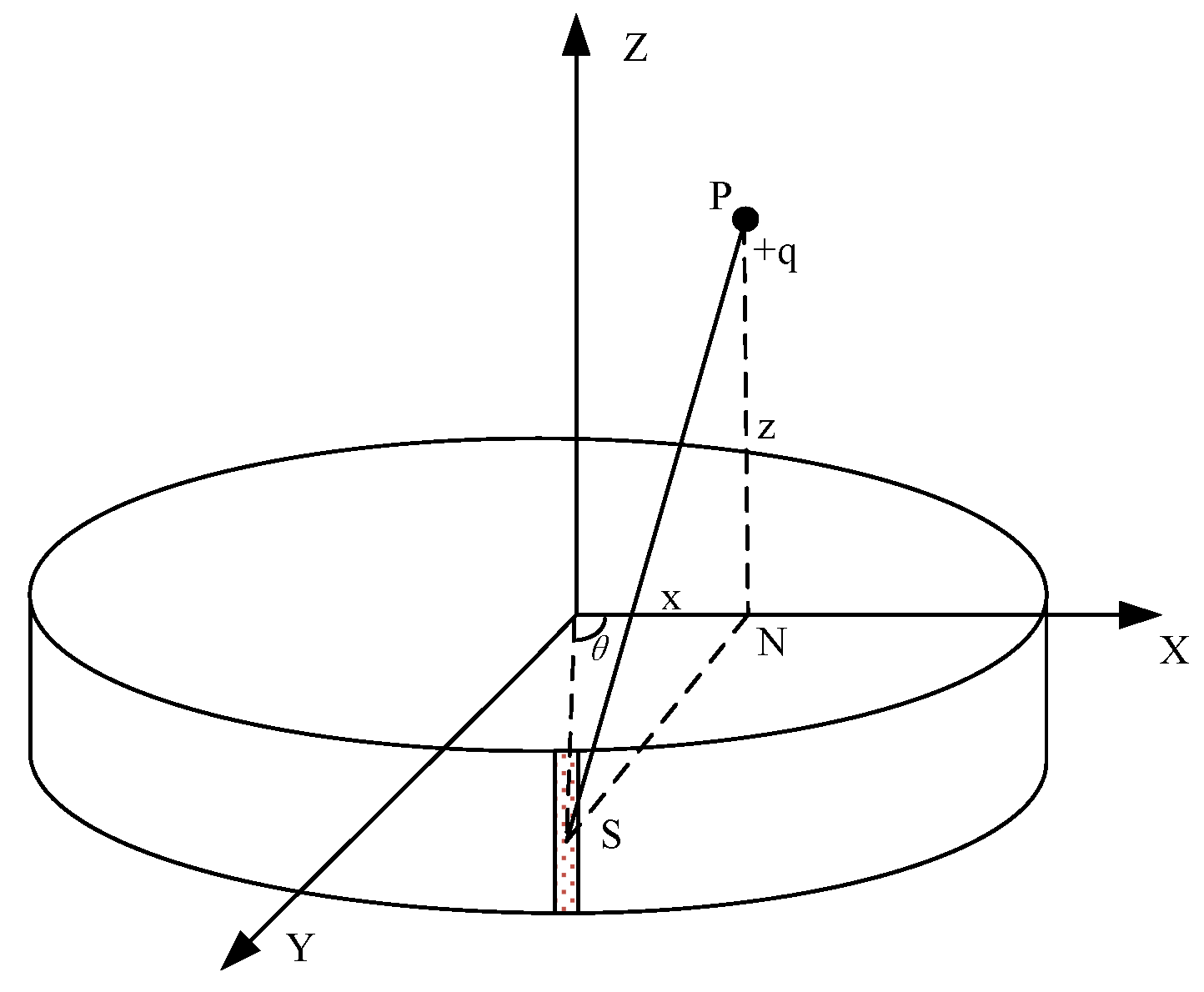
2.1. Mathematical Model of the Electrostatic Sensor
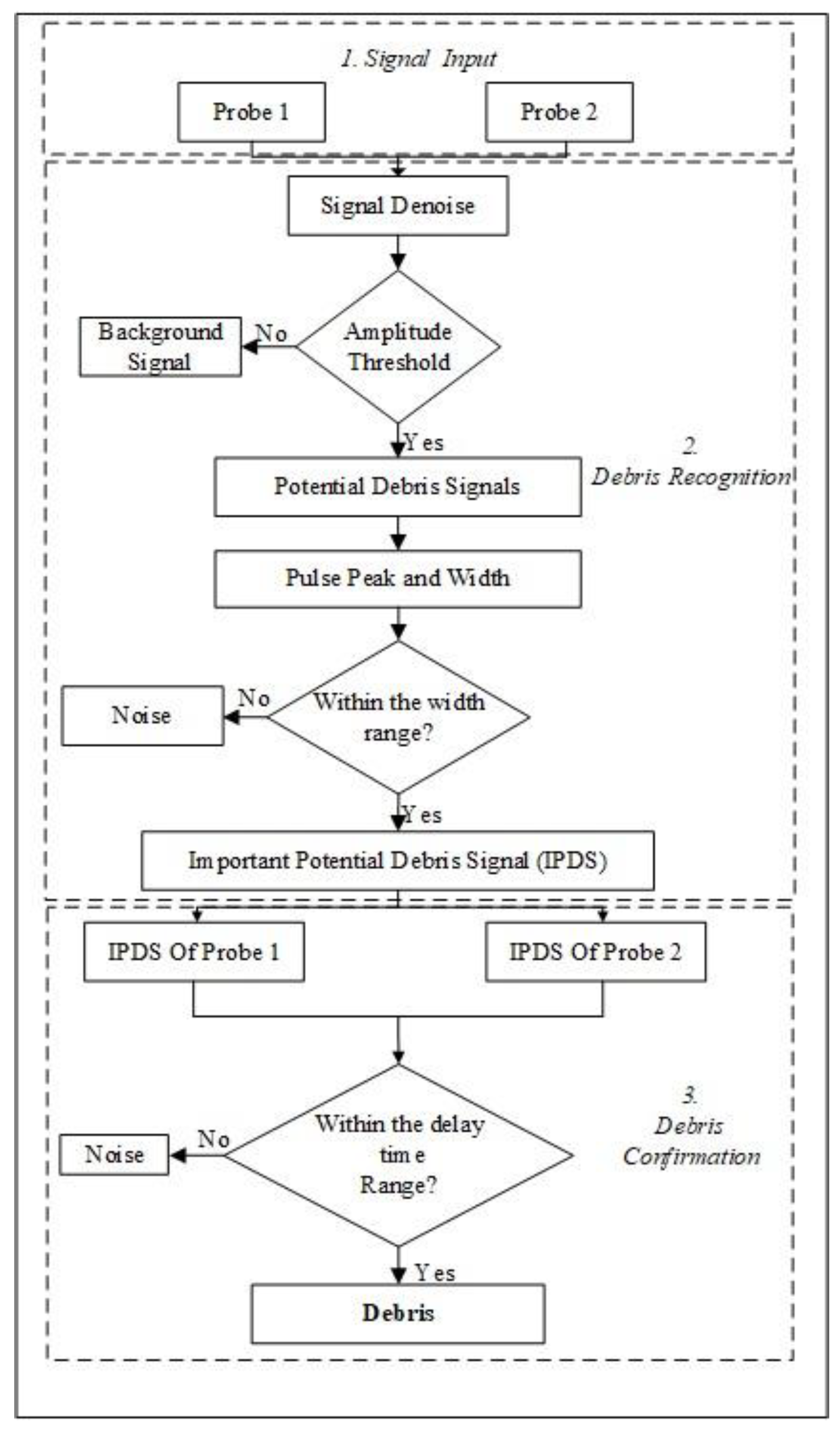
2.2. Debris Recognition Method using Electrostatic Signals
- Step 1:
- Input the signals of the two probes.
- Step 2:
- Noise reduction. As the electrostatic signals belong to weak signals, strong noise can cause the debris characteristic pulse signal to be submerged in the noise and become difficult to identify. In order to improve the recognition accuracy, it is necessary to perform noise reduction first. In this paper, the main noise in the signal is the power frequency interference of 50 Hz. Therefore, a Finite Impulse Response (FIR) digital notch filter is used to eliminate the power frequency interference, the stop-band of which is set to 45–55 Hz.
- Step 3:
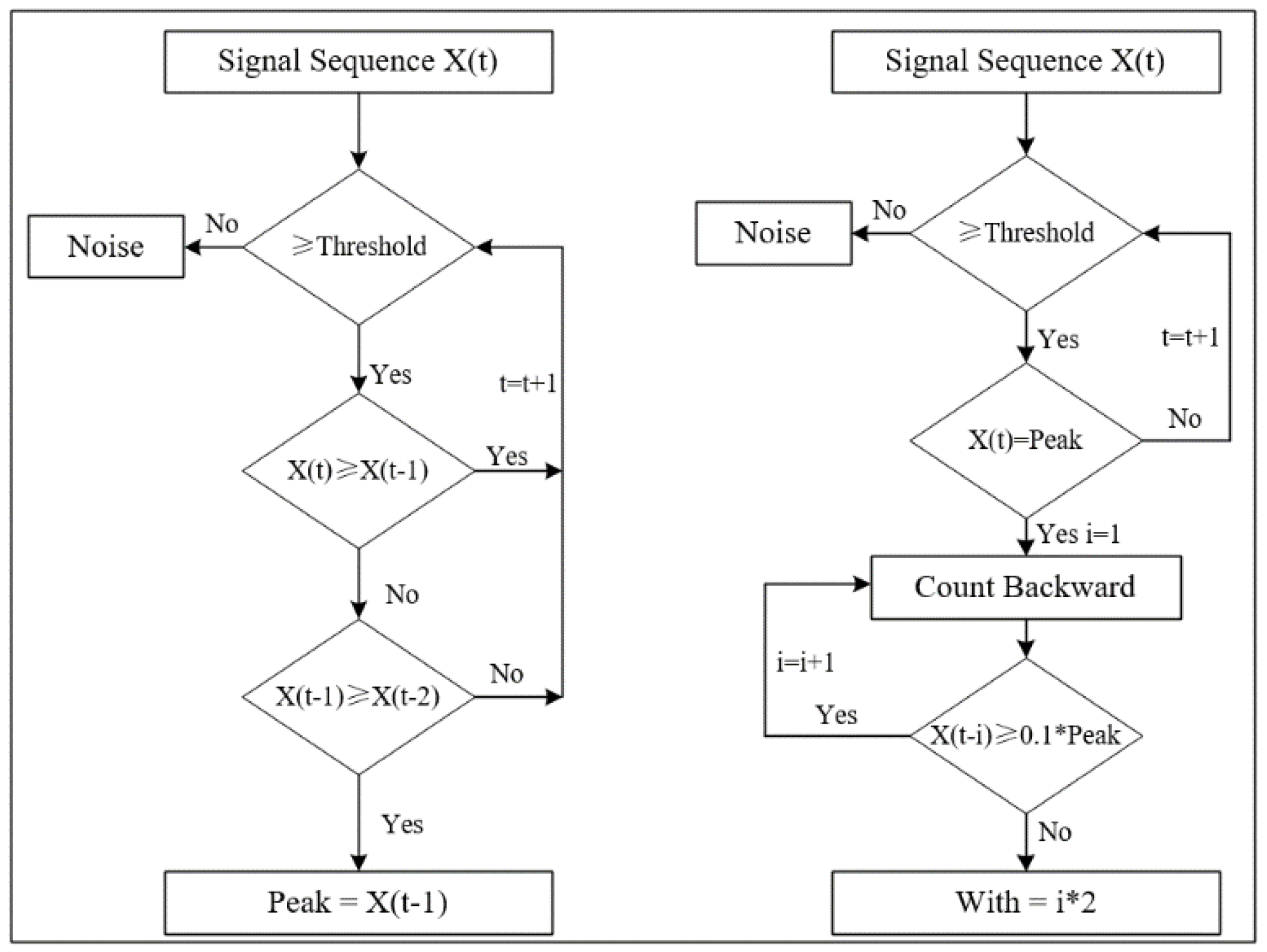
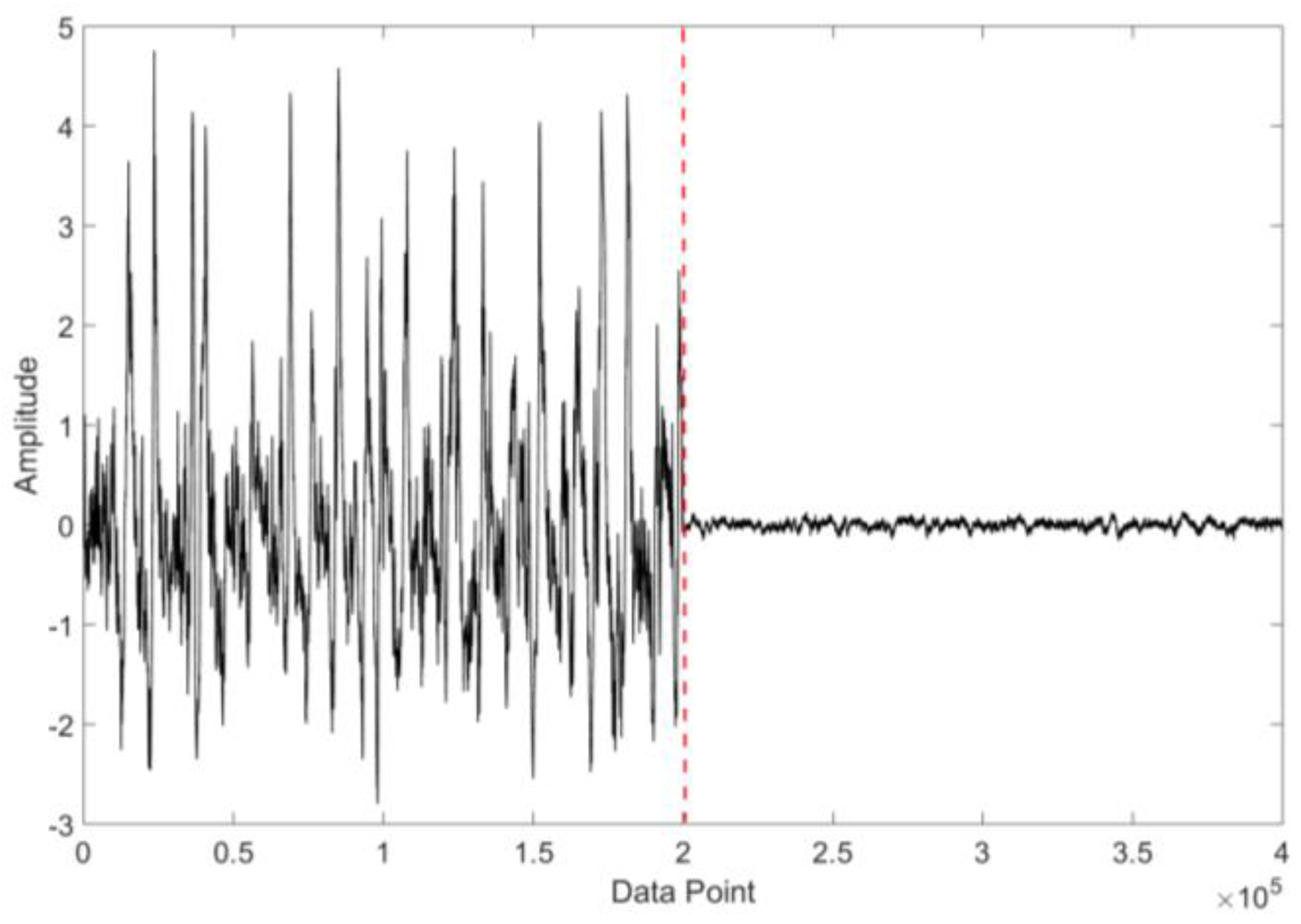
- Identify the Potential Debris Signal. To distinguish between the debris signal and the random noise signal, an amplitude threshold is set according to the background signal magnitude level. The signal above threshold is considered to be the Potential Debris Signal and the signal below threshold is considered to be the noise.
- Step 4:
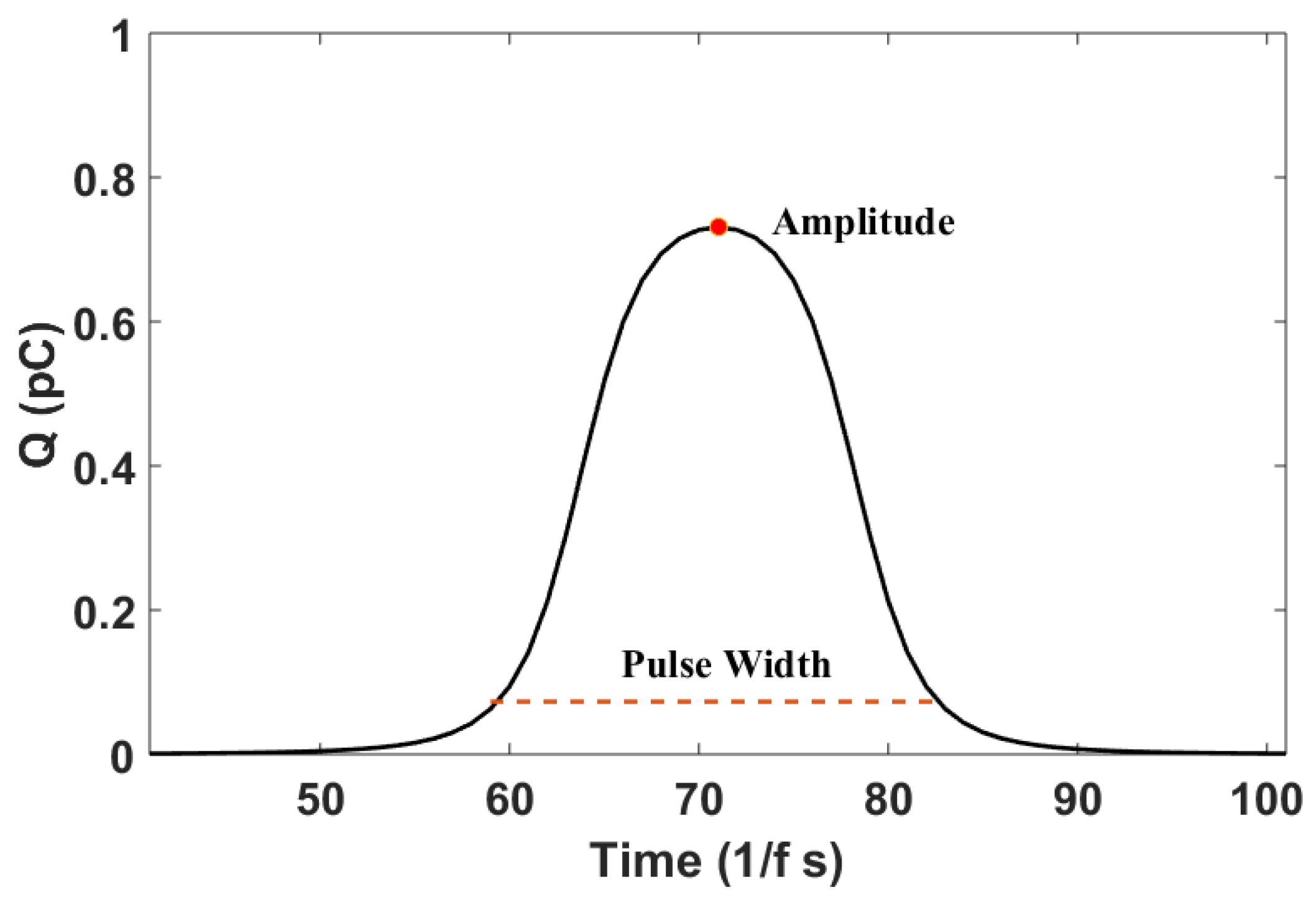
- Identify the Peak and Pulse width of the Potential Debris Signal. The detailed identification method is presented in Figure 6. For the pulse peak, the identification method is obvious. After finding the peak value, count the signal sequence backward until it reaches 0.1 times the peak value. The resulting count value multiplied by twice the sampling interval is the width of the debris characteristic pulse.
- Step 5:
- Identify the Important Potential Debris Signal (IPDS). According to the pulse width, determine whether the signal is caused by debris or interference. For interference, its pulse width is usually very short. For the debris signal, the pulse width has a certain range corresponding to the flow rate, which can be determined by the analysis of the model and experiments. A pulse width threshold is set to distinguish the interference from the potential debris signal. The signal within the width range is set as the IPDS, and the signal below the lower limit of the width range is considered to be the noise.
- Step 6:
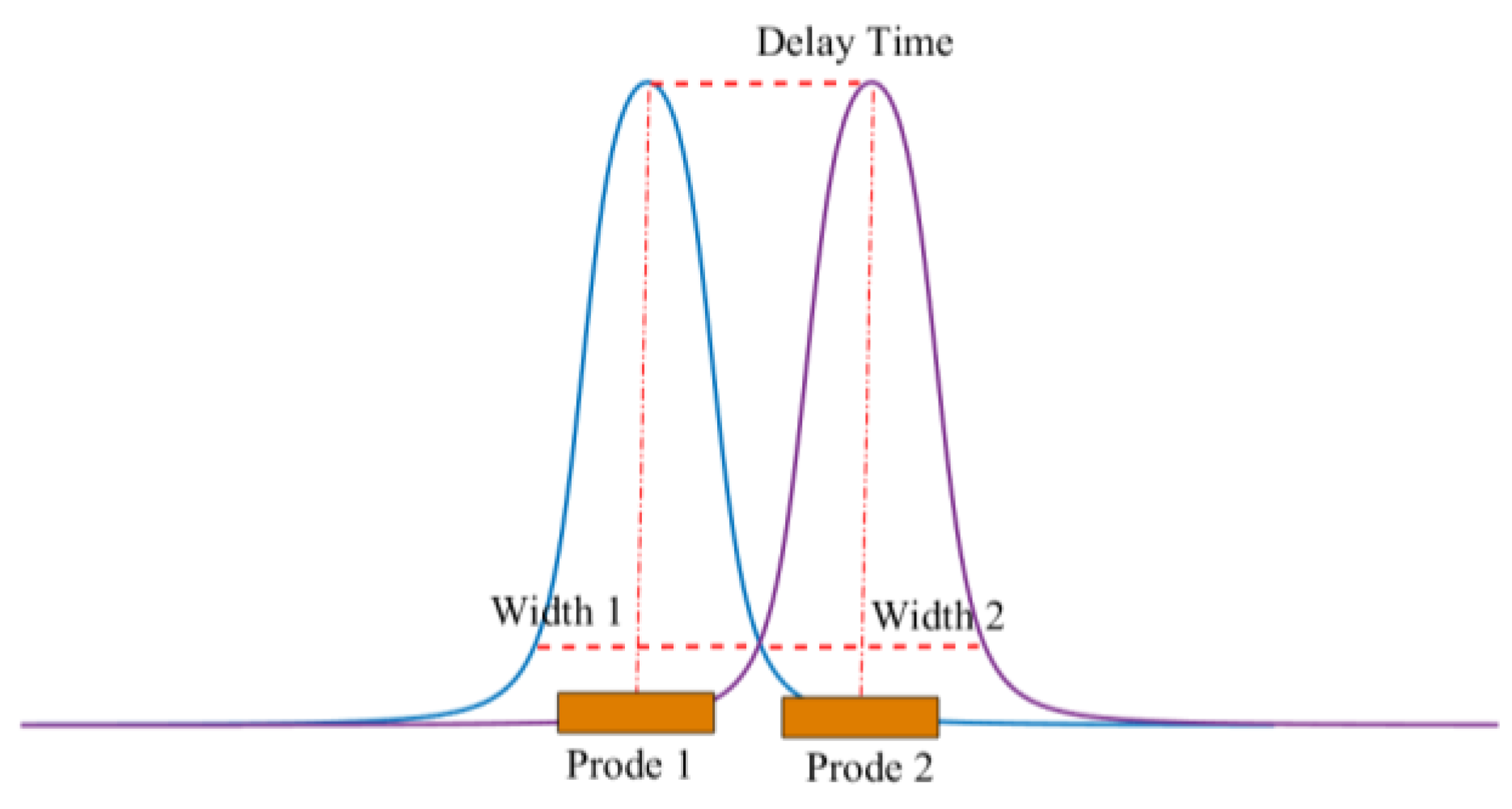
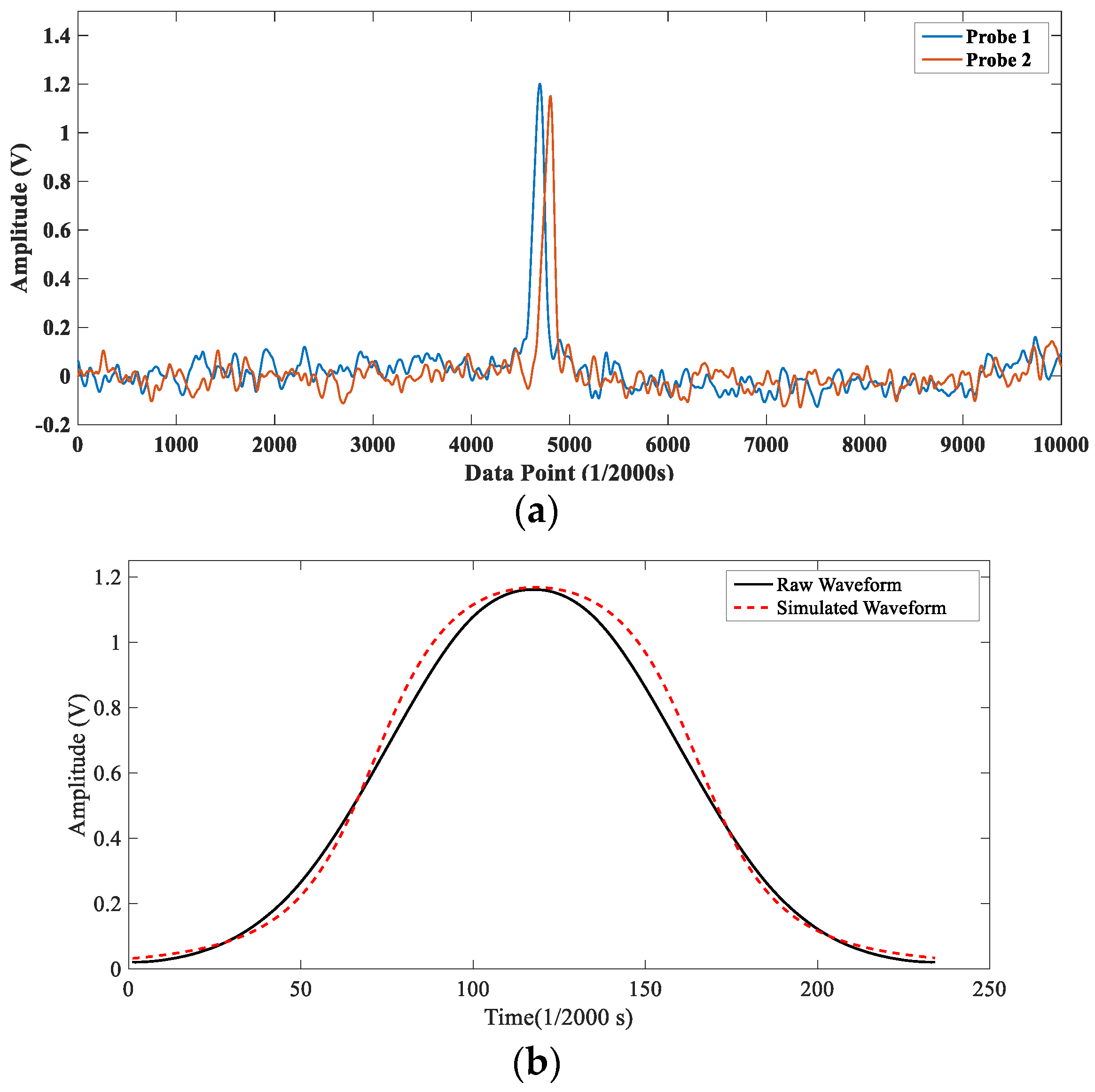
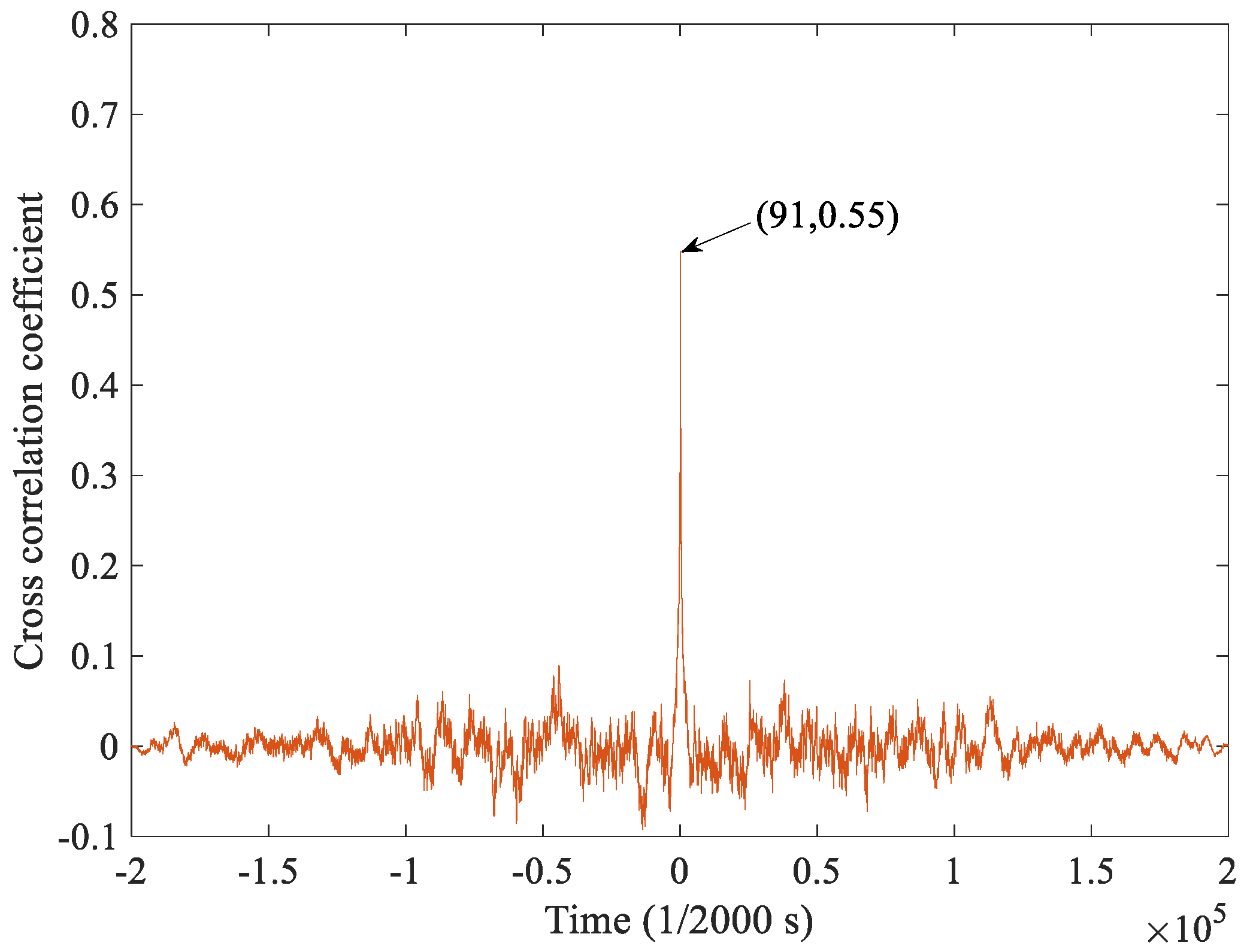
- Conform the debris signals with the two probes. As the debris passes through the first probe and the second probe, there is a delay time between the occurrence time of the debris signals in the two probes. Whereas, if the IPDS is caused by the interference, the IPDS will occur in the two probes at the same time. Therefore, by verifying the delay time between the IPDSs in the two probes, the debris can be finally confirmed.
3. Experimental Setup and Test Procedure
3.1. Experimental Setup
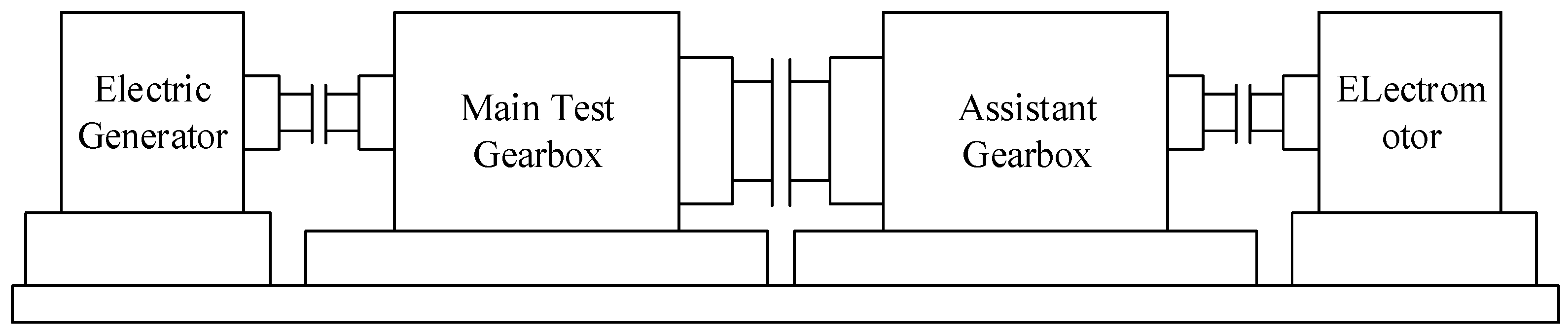
3.1.1. Gearbox Bench Test Device
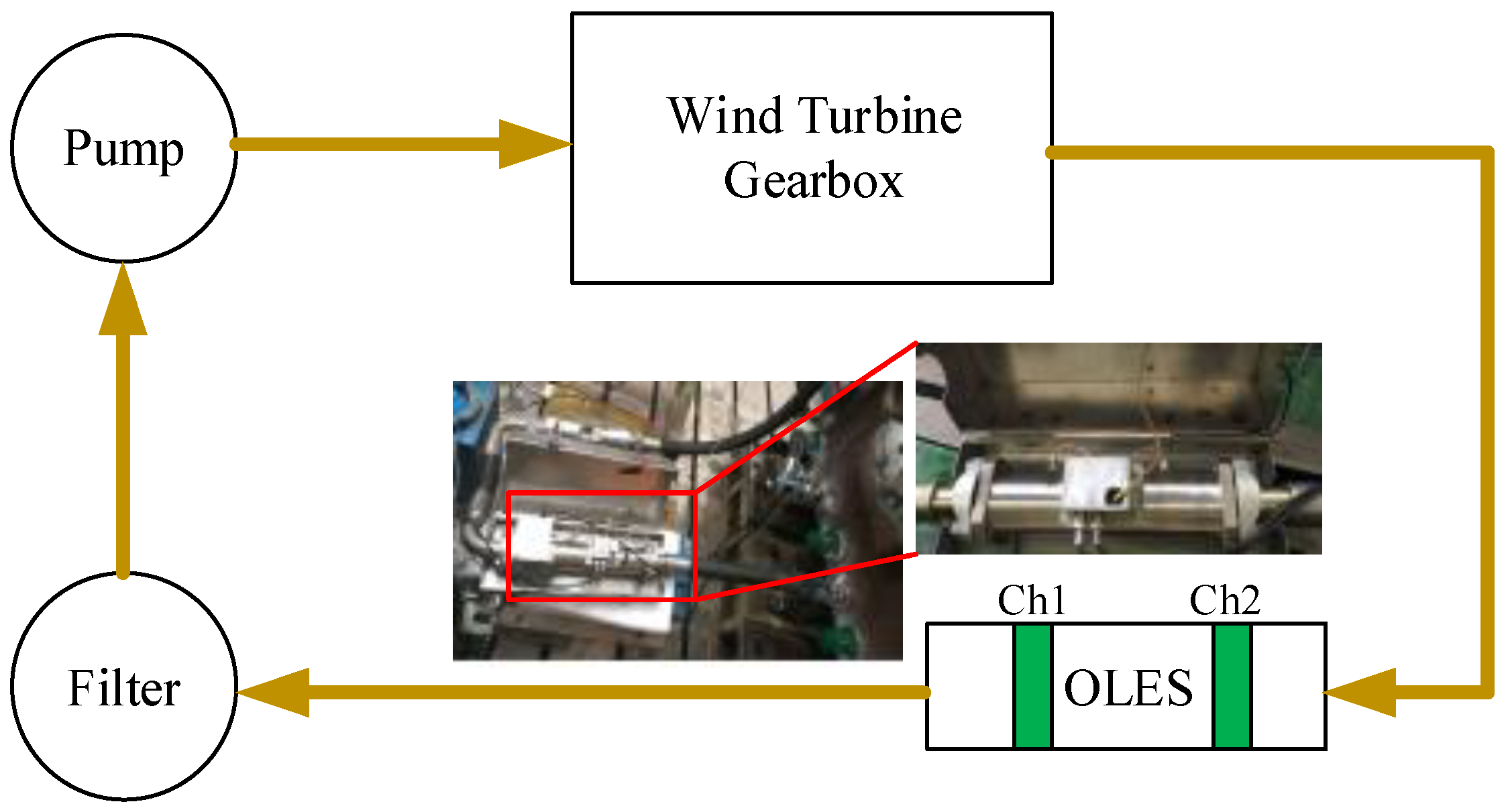
3.1.2. Electrostatic Monitoring System
3.2. Test Procedure
4. Results and Analysis
4.1. The Raw Signal
4.1.1. The Debris Characteristic Signal
4.1.2. The Background Signal
4.1.3. Background Signals in Different Conditions
The Status of the Lubricating Oil Pump
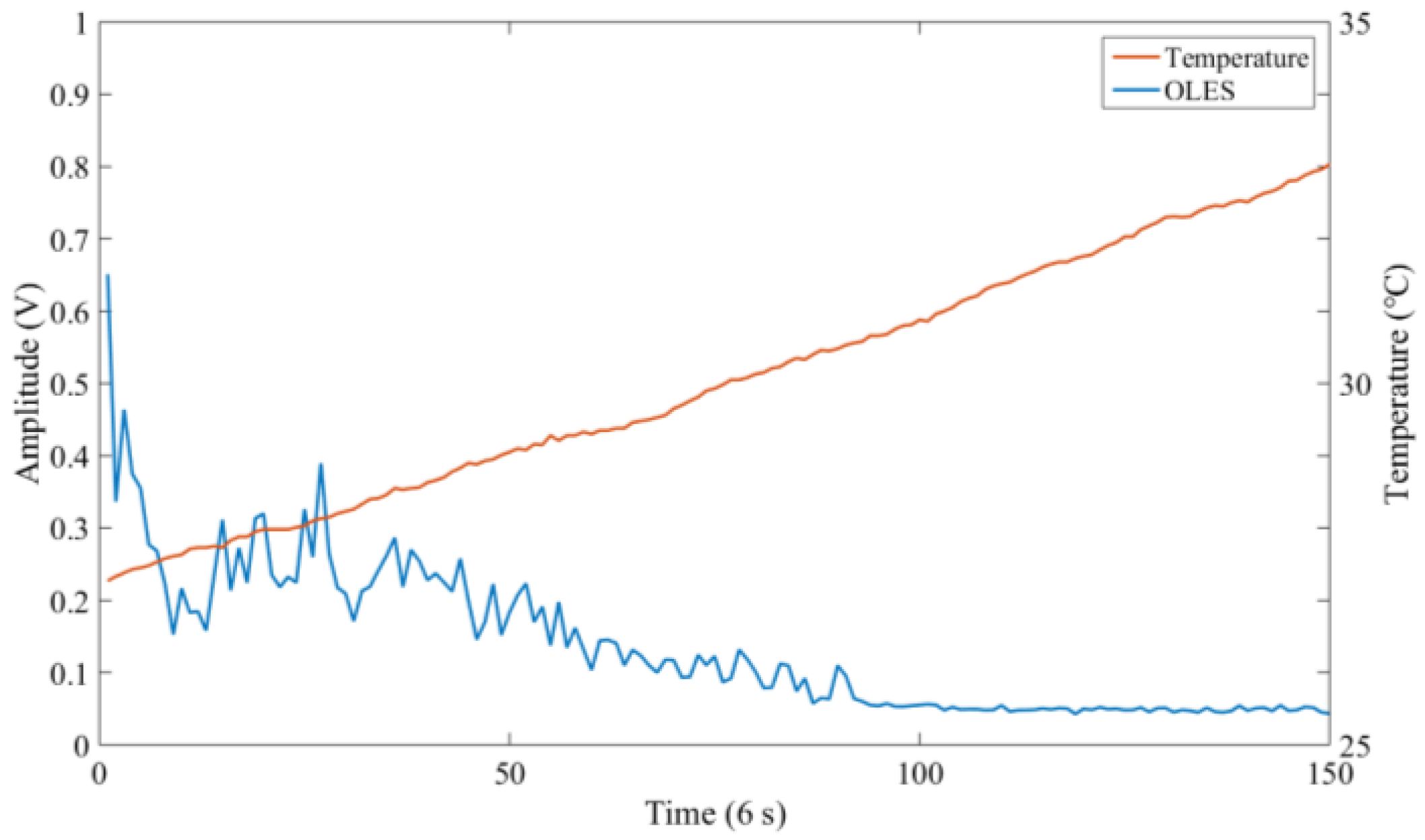
Oil Temperature
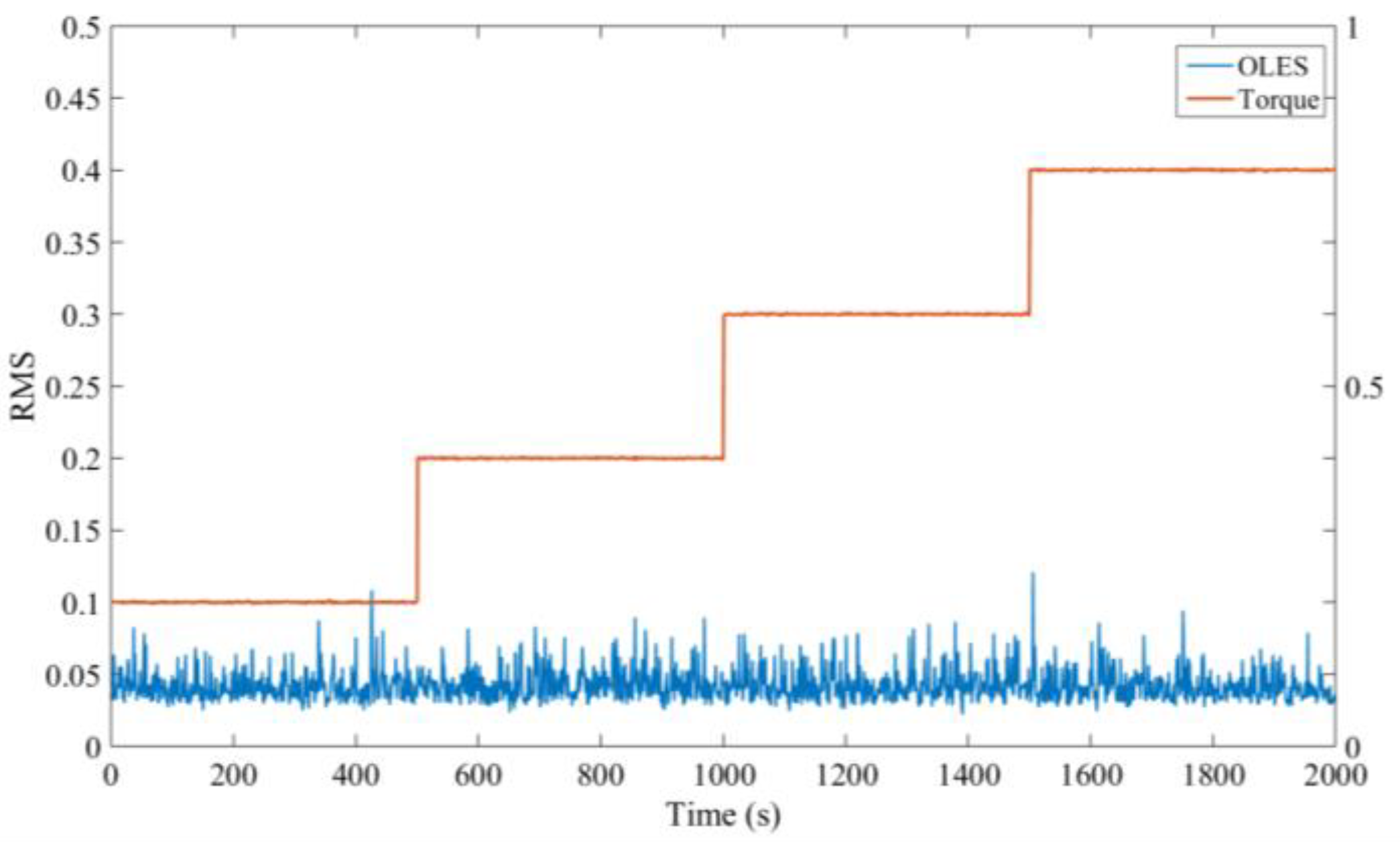
Effect of the Gearbox Torque on the Background Signal
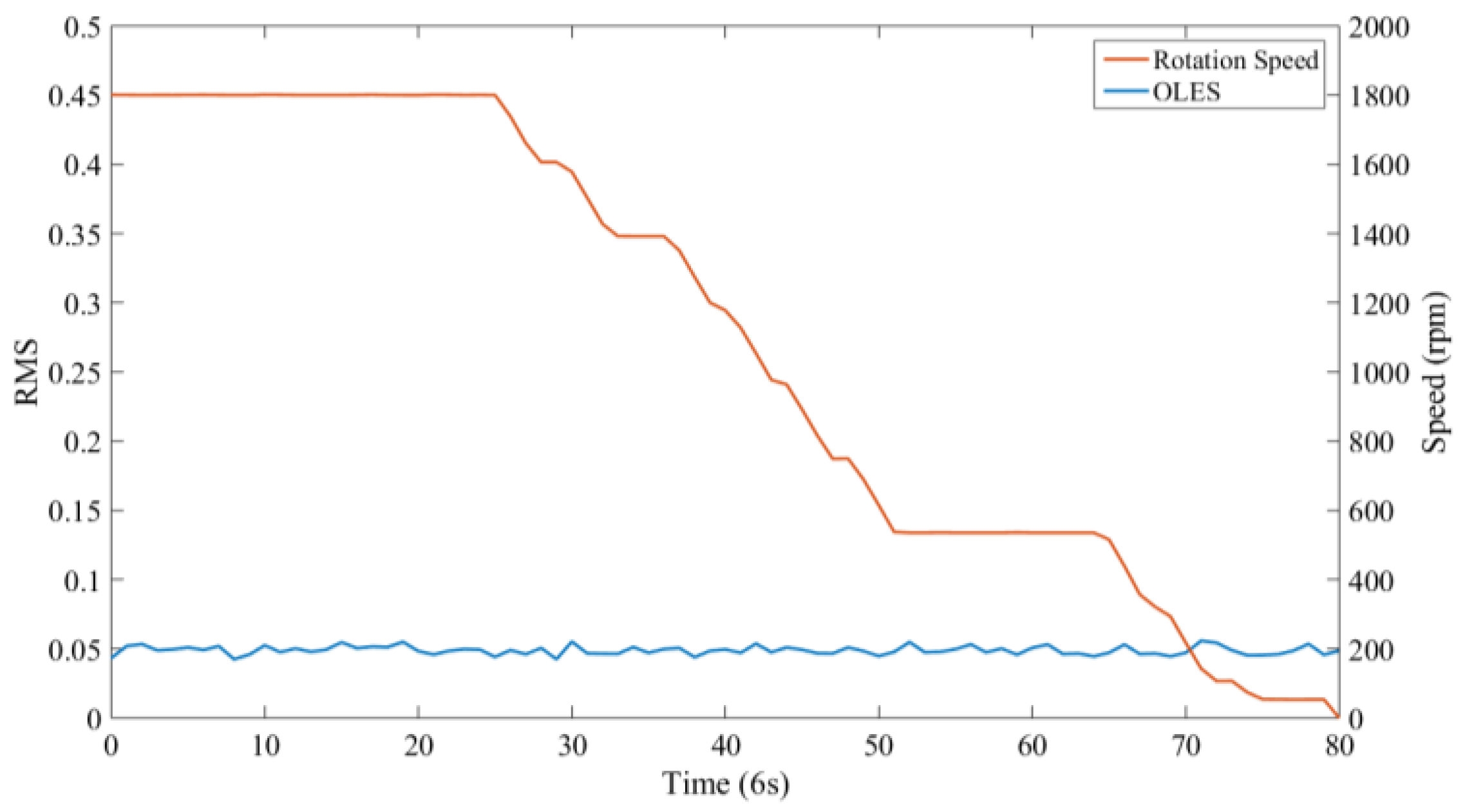
Effects of the Gearbox Rotation Speed on the Electrostatic Signals
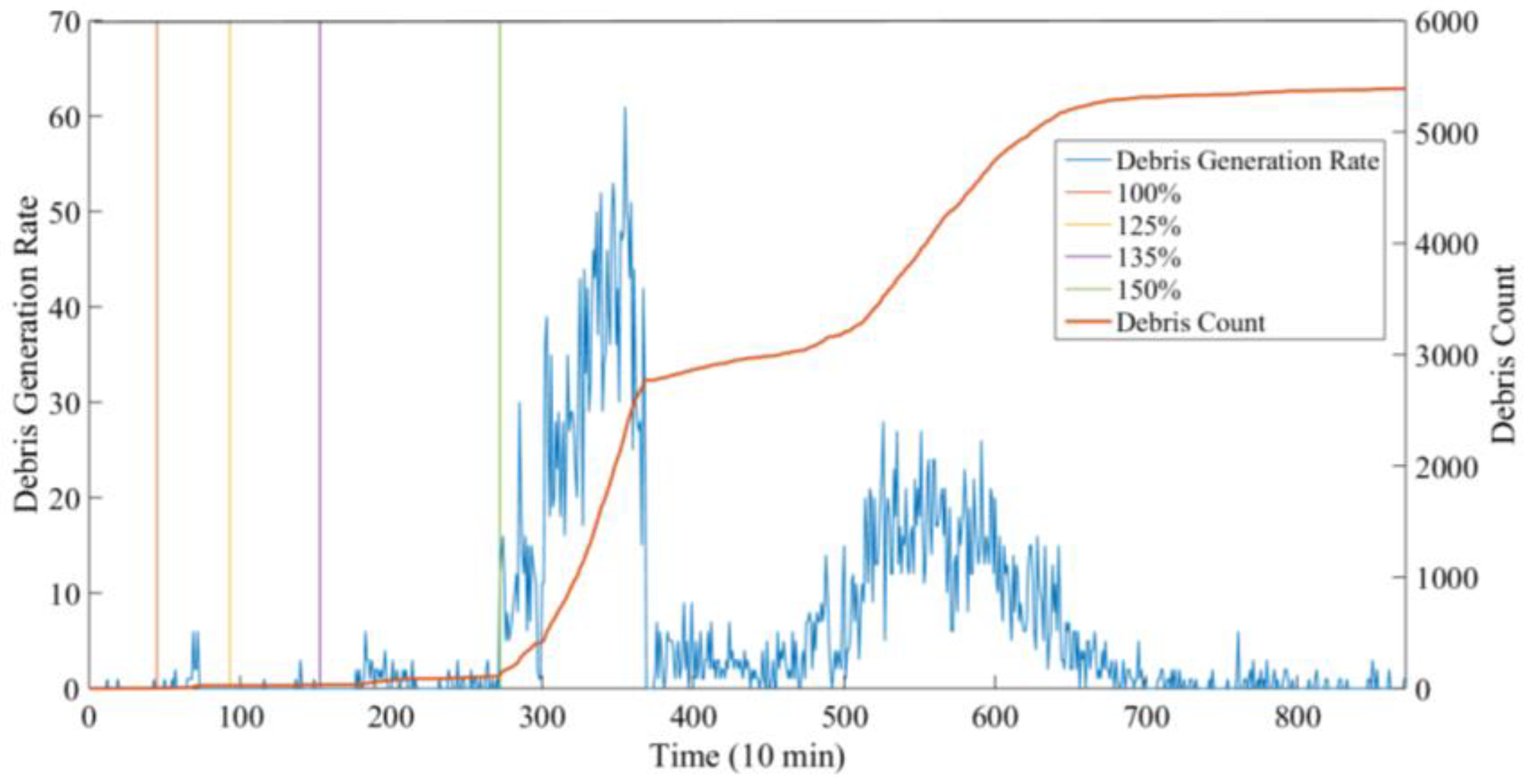
4.2. Wear Debris Analysis
4.3. Wear Debris Size Analysis
4.4. Charge Leakage Analysis
5. Conclusions
- (1)
- With the proposed debris recognition method, the electrostatic sensor can capture the debris characteristic pulse effectively in the practical application. The measured result of the OLES indicated the anomalous condition of the gearbox successfully, as proven by the subsequent inspection of the gearbox.
- (2)
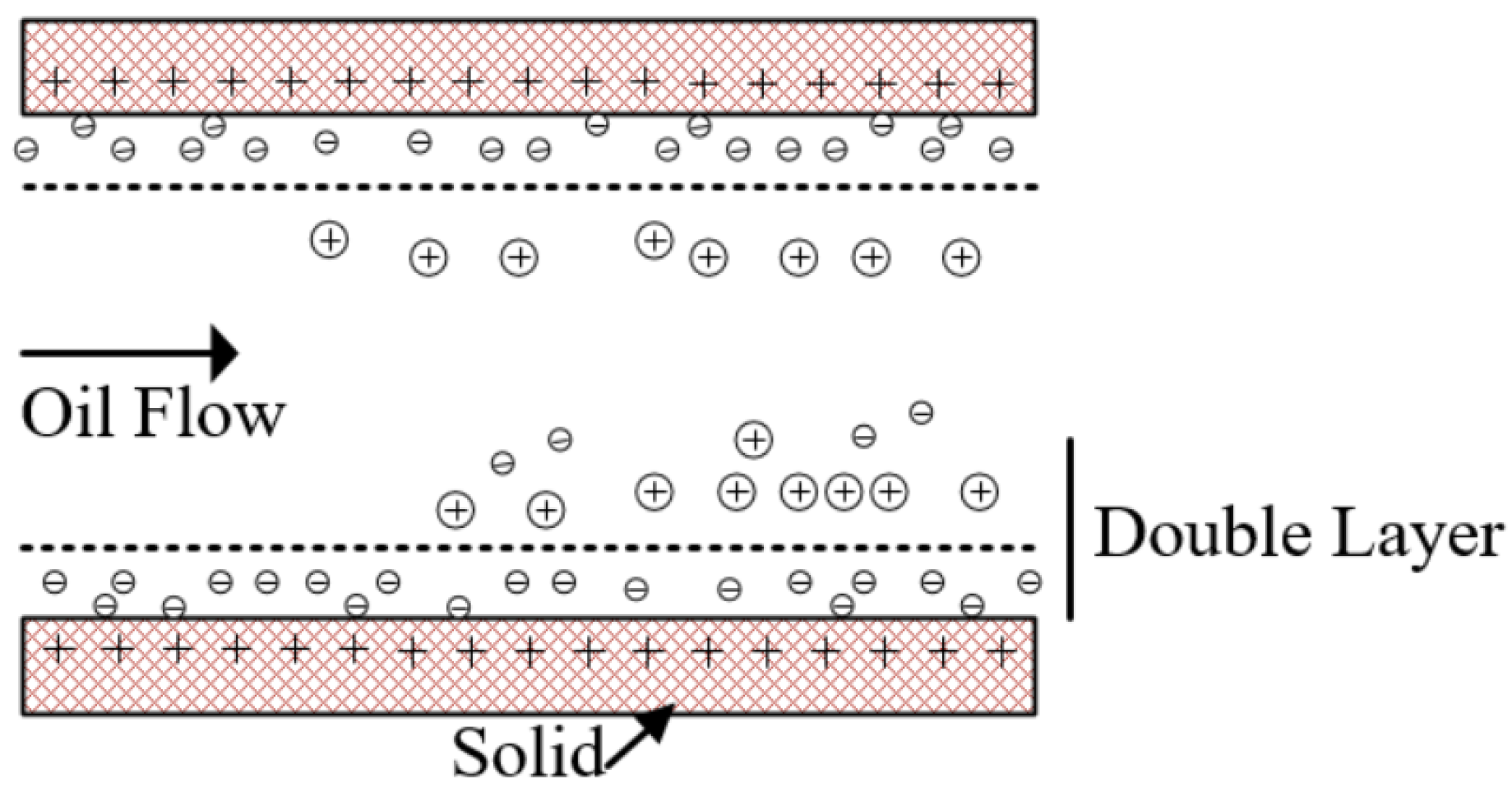
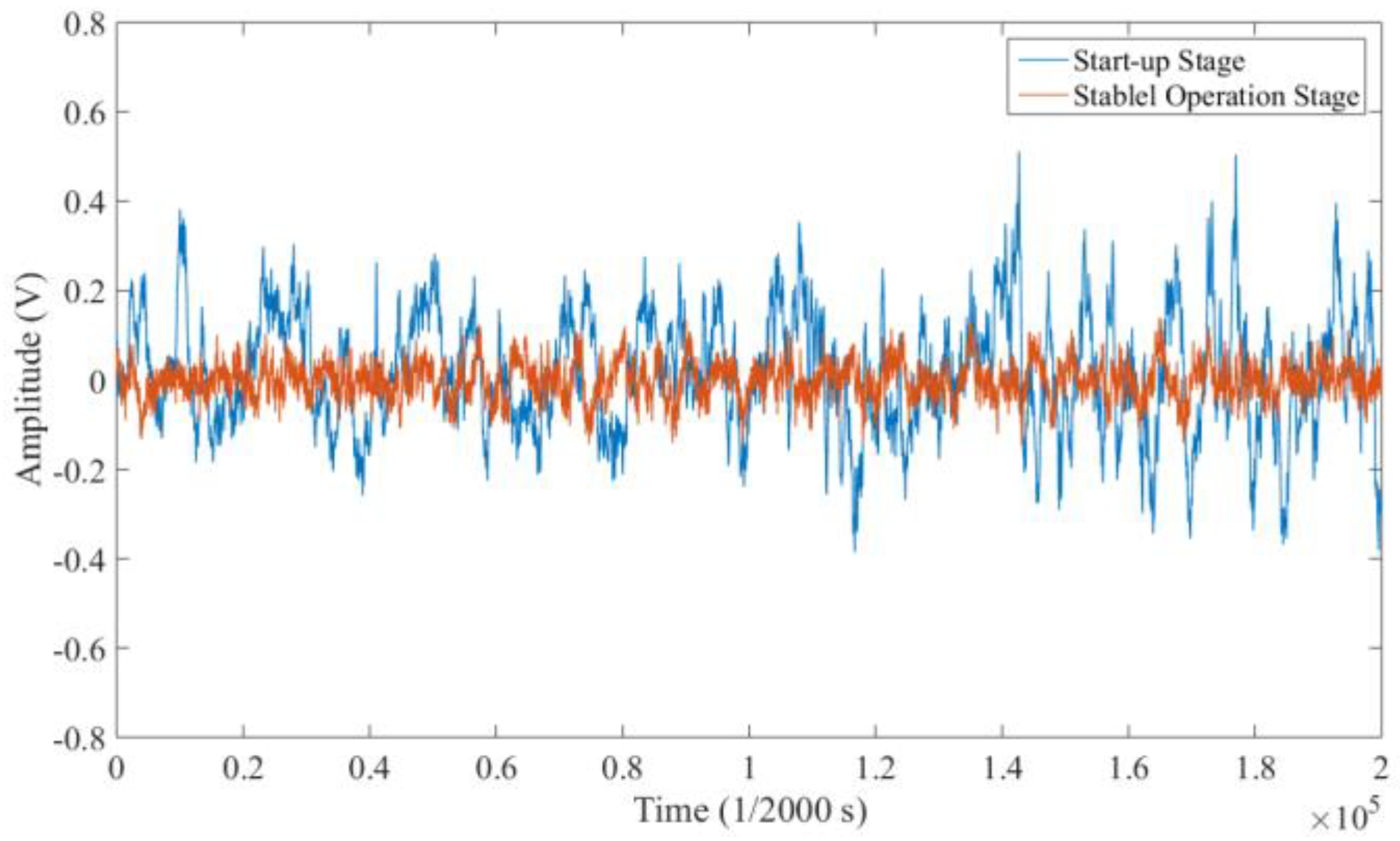
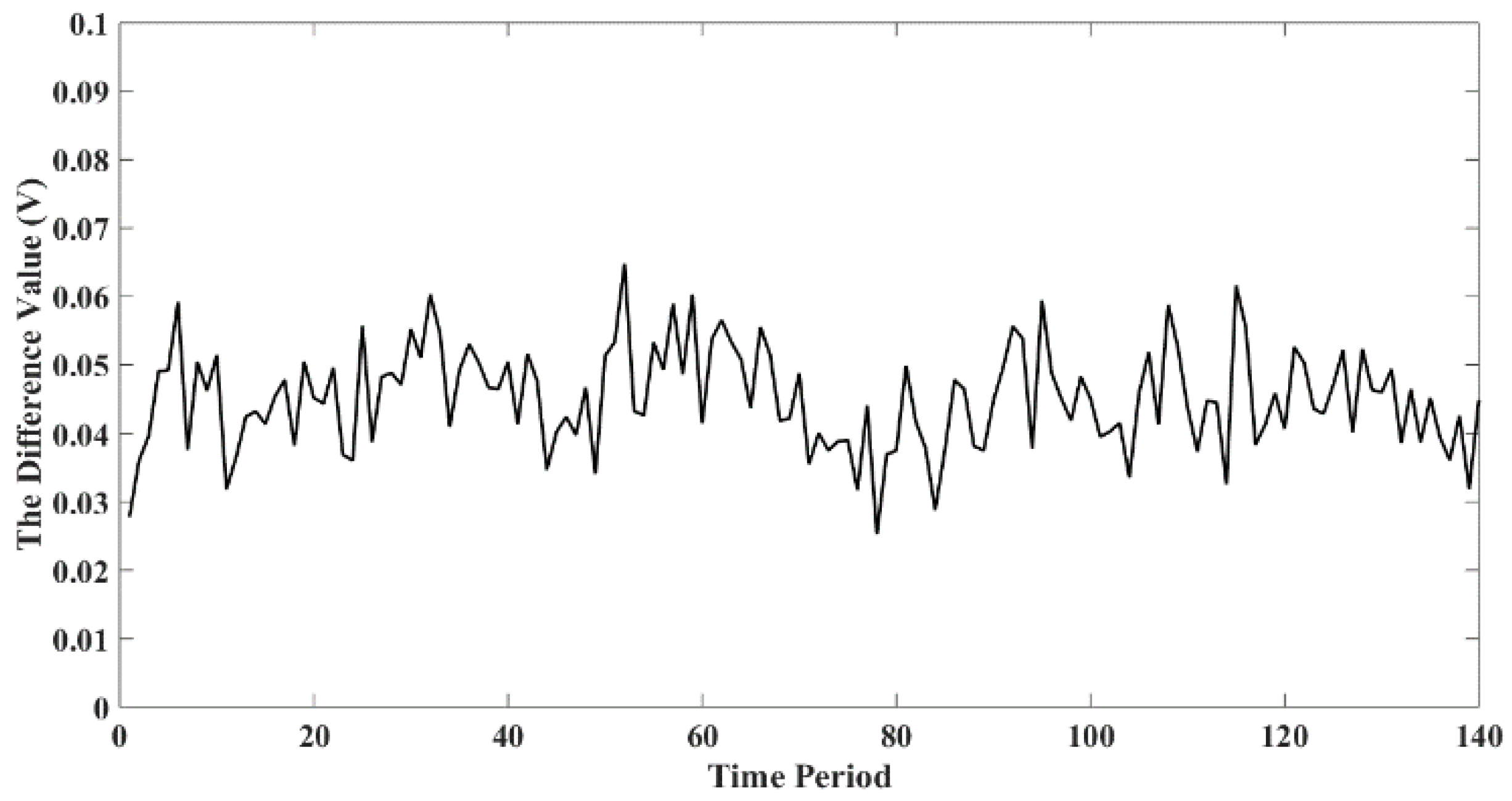
- In the wind turbine gearbox bench test, the electrostatic signal contains the background signal with certain magnitudes due to the charging of the oil flow, which is related to the oil temperature and the oil flow rate, but has no relationship with the operating conditions of the gearbox. As the temperature and the flow rate of the oil remain stable after the startup phase, the electrostatic sensor is effective in all operation phases of the wind turbine except the short start-up phase, indicating that the electrostatic sensor has a strong application applicability in the wind turbine gearbox.
- (3)
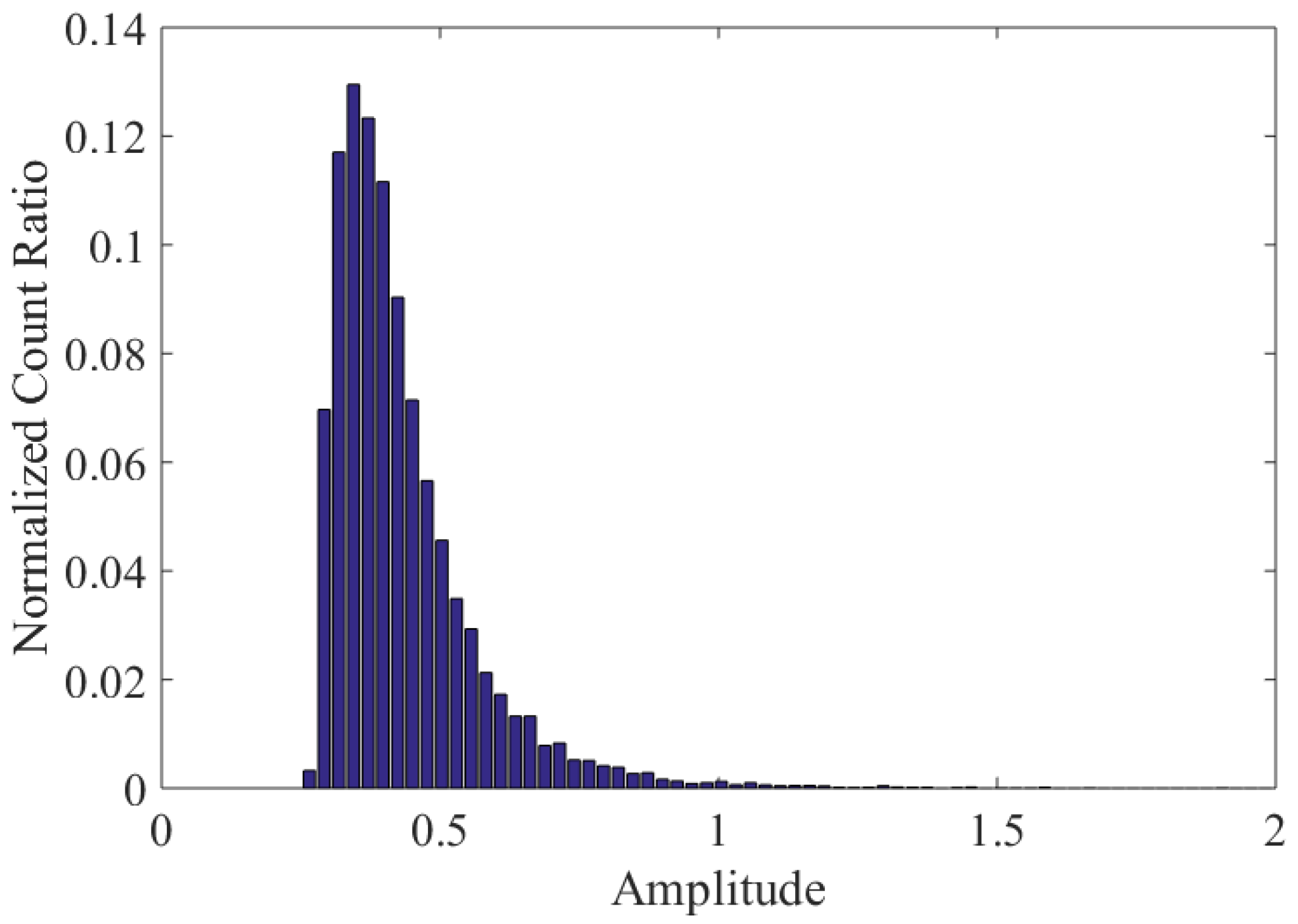
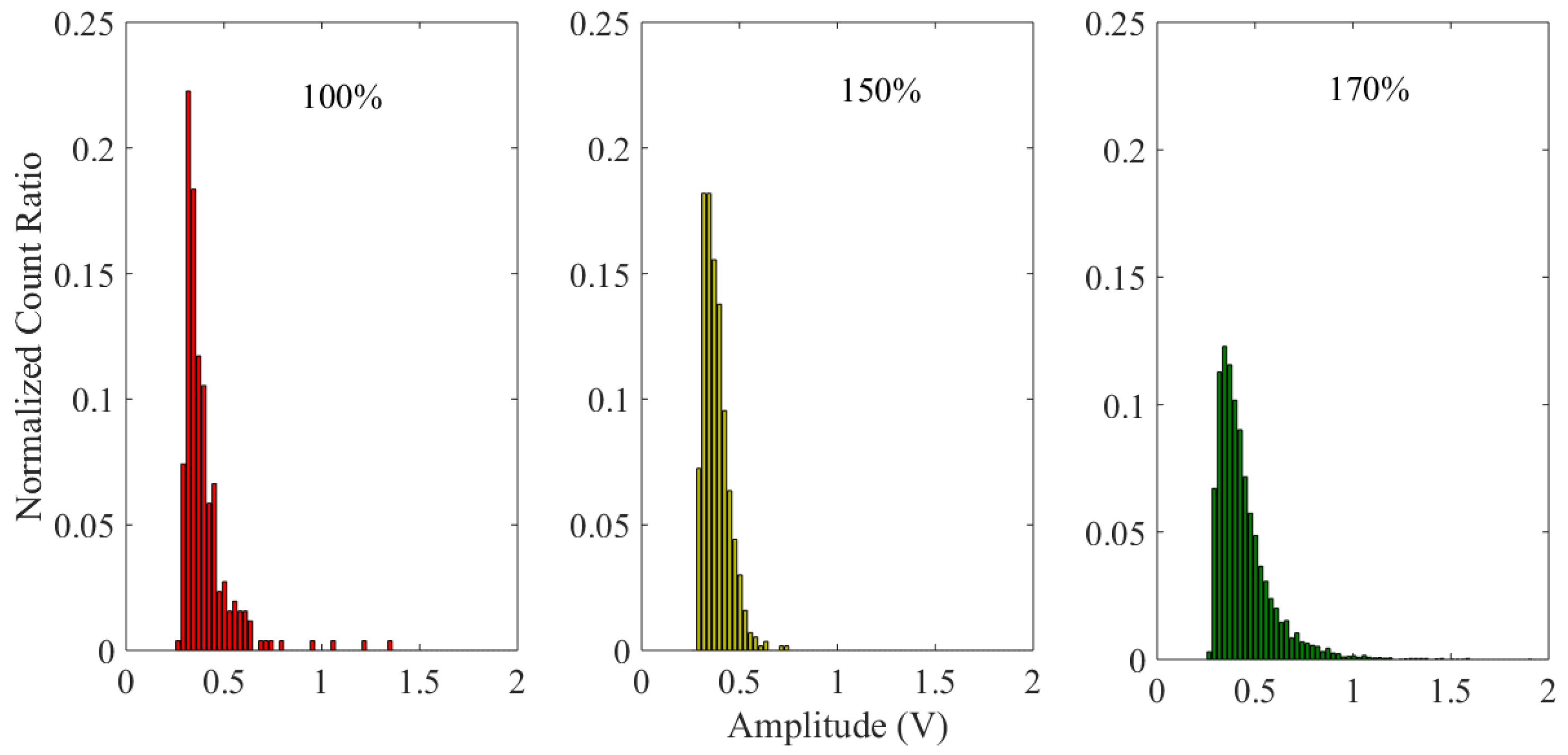
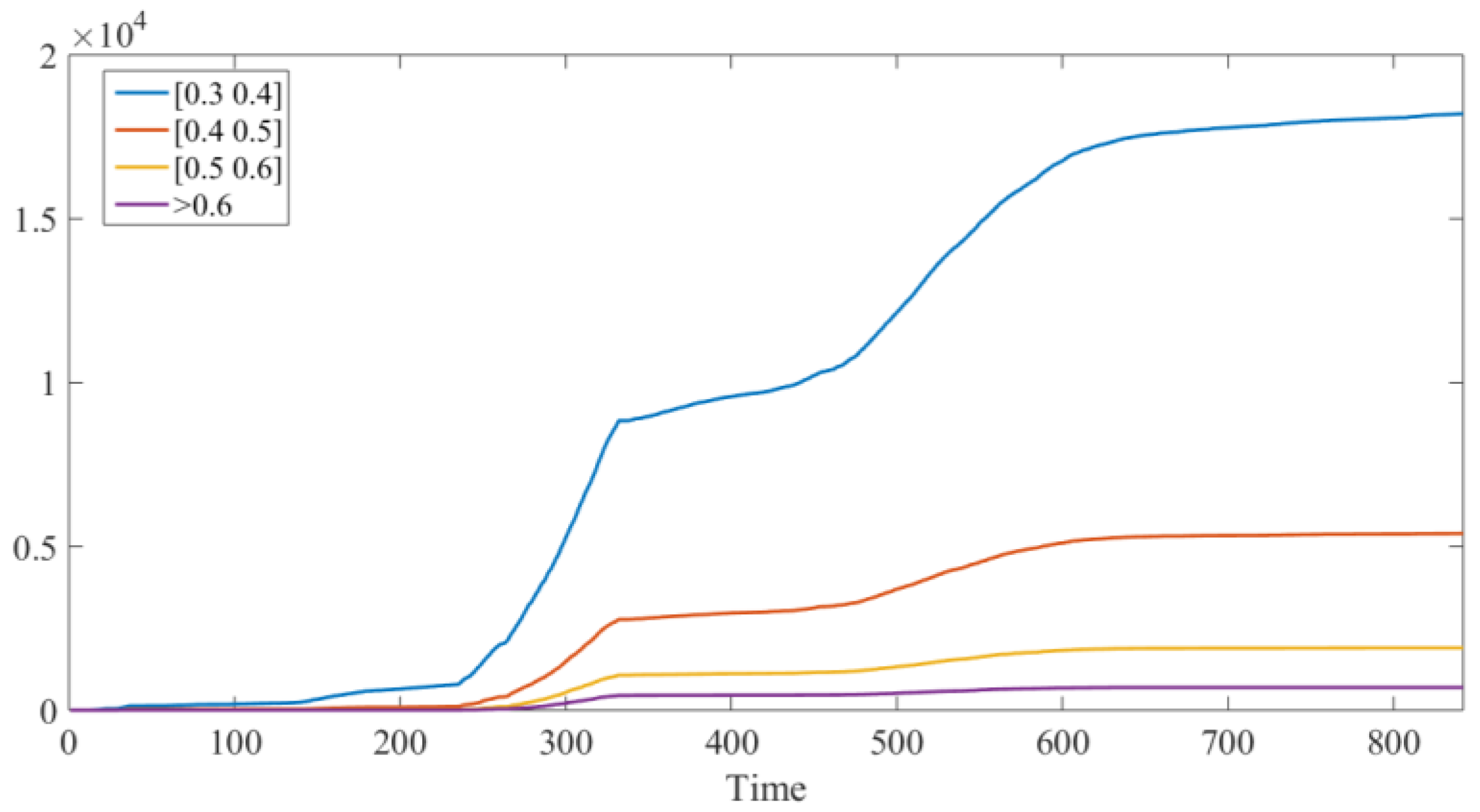
- During the whole test, the amplitude of the recognized debris pulse signal mainly concentrates in the low amplitude interval. In addition, the amplitude concentration gradually increases with machine operation time, which is consistent with the wear debris size growth rule in the gearbox. This result proves that there is a positive correlation between the wear debris size and the amplitude of the debris characteristic pulse, providing a direction for further research on the acquisition of wear debris size information by electrostatic signals.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| OLES | Oil-line electrostatic sensor |
| FZG | A gear rig test |
| SFETs | Seeded fault engine tests |
| FIR | Finite Impulse Response |
| IPDS | Important potential debris signal |
| Uout | The output voltage of the charge amplification circuit |
| Q | The charge induced on the probe by the debris |
| Cf | The feedback capacitance of the amplifying circuit |
| q | The charge of the debris |
| D | The diameter of the probe |
| W | The axial length of the probe |
| θ | The azimuth angle of the micro-element sensing region S in the coordinate system of the model |
| z | The coordinate of the debris in the Z direction |
| x | The coordinate in the X direction |
| F(x, θ) | The distance between the projection N on the XOY plane of the debris and the micro-element S |
| Upeak | The peak value of the debris characteristic pulse |
| The pulse width of the debris characteristic pulse | |
| The delay time between the two pulses on the two probes induced by the debris | |
| Dprobe | The distance between the two probes |
| The velocity of the debris | |
| Qp | The charge of the particle |
| α | A constant associated with the material of the debris and the medium the debris in |
| dp | The equivalent diameter of the particle |
| γ | The constant determined by the test |
References
- Nie, M.; Wang, L. Review of Condition Monitoring and Fault Diagnosis Technologies for Wind Turbine Gearbox. Procedia CIRP 2013, 11, 287–290. [Google Scholar] [CrossRef]
- Lu, B.; Li, Y.Y.; Wu, X.; Yang, Z.Z. A review of recent advances in wind turbine condition monitoring and fault diagnosis. In Proceedings of the 2009 IEEE Power Electronics and Machines in Wind Applications, Lincoln, NE, USA, 24–26 June 2009. [Google Scholar]
- Dupuis, R. Application of Oil Debris Monitoring for Wind Turbine Gearbox Prognostics and Health Management. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, Portland, OR, USA, 13–16 October 2010; pp. 10–16. [Google Scholar]
- Tabatabaeipour, S.M.; Odgaard, P.F.; Bak, T.; Stoustrup, J. Fault Detection of Wind Turbines with Uncertain Parameters: A Set-Membership Approach Energies. Sensors 2012, 5, 2424–2448. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.M.; Hong, H. Fuzzy Gain-Scheduled Active Fault-Tolerant Control of a Wind Turbine. J. Franklin Inst. 2014, 351, 3677–3706. [Google Scholar] [CrossRef]
- Sanchez, H.; Escobet, T.; Puig, V.; Odgaard, P.F. Fault Diagnosis of an Advanced Wind Turbine Benchmark Using Interval-Based ARRs and Observers. IEEE Trans. Ind. Electron. 2015, 62, 3783–3793. [Google Scholar] [CrossRef]
- Casau, P.; Rosa, P.; Tabatabaeipour, S.M.; Silvestre, C.; Stoustrup, J. A Set-Valued Approach to FDI and FTC of Wind Turbines. IEEE Trans. Control Syst. Technol. 2015, 23, 245–263. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.M.; Hong, H. Wind Turbine Fault Diagnosis and Fault-Tolerant Torque Load Control against Actuator Faults. IEEE Trans. Control Syst. Technol. 2015, 23, 1351–1372. [Google Scholar] [CrossRef]
- Loutas, T.H.; Roulias, D.; Pauly, E. The combined use of vibration, acoustic emission and oil debris on-line monitoring towards a more effective condition monitoring of rotating machinery. Mech. Syst. Sig. Process. 2011, 25, 1339–1352. [Google Scholar] [CrossRef]
- Ebersbach, S.; Peng, Z.; Kessissoglou, N.J. The investigation of the condition and faults of a spur gearbox using vibration and wear debris analysis techniques. Wear 2006, 260, 16–24. [Google Scholar] [CrossRef]
- Zhu, X.; Zhong, C.; Zhe, J. Lubricating oil conditioning sensors for online machine health monitoring—A review. Tribol. Int. 2017, 109, 473–484. [Google Scholar] [CrossRef]
- Edmonds, J.; Resner, M.S.; Shkarlet, K. Detection of precursor wear debris in lubrication systems. In Proceedings of the 2000 IEEE Aerospace Conference, Big Sky, MT, USA, 25 March 2000; pp. 73–77. [Google Scholar]
- Zhan, H.; Song, Y.; Zhao, H.; Gu, J.; Yang, H.; Li, S. Study of the sensor for on-line lubricating oil debris monitoring. Sens. Transducers 2014, 175, 214–219. [Google Scholar]
- Li, C.; Peng, J.; Liang, M. Enhancement of the wear particle monitoring capability of oil debris sensors using a maximal overlap discrete wavelet transform with optimal decomposition depth. Sensors 2014, 14, 6207. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Liang, M. Separation of the vibration-induced signal of oil debris for vibration monitoring. Smart Mater. Struct. 2011, 20, 045016. [Google Scholar] [CrossRef]
- Tasbaz, O.D.; Wood, R.J.K.; Browne, M.; Powrie, H.E.G.; Denuault, G. Electrostatic monitoring of oil lubricated sliding point contacts for early detection of scuffing. Wear 1999, 230, 86–97. [Google Scholar] [CrossRef]
- Powrie, H.E.G.; Fisher, C.E. Engine health monitoring: Towards total prognostics. In Proceedings of the 1999 IEEE Aerospace Conference, Snowmass, CO, USA, 7 March 1999; pp. 11–20. [Google Scholar]
- Powrie, H.E.G.; Fisher, C.E.; Tasbaz, O.D.; Wood, R.J.K. Performance of an Electrostatic Oil Monitoring system during an FZG gear scuffing test. In Proceedings of the International Conference on Condition Monitoring, Sunderland, UK, 6–9 July 1999; pp. 145–155. [Google Scholar]
- Harvey, T.J.; Morris, S.; Wang, L.; Wood, R.J.K.; Powrie, H.E.G. Real-time monitoring of wear debris using electrostatic sensing techniques. J. Eng. Tribol. 2007, 221, 27–40. [Google Scholar] [CrossRef]
- Harvey, T.J.; Wood, R.J.K.; Denuault, G.; Powrie, H.E.G. Effect of oil quality on electrostatic charge generation and transport. J. Electrostat. 2002, 55, 1–23. [Google Scholar] [CrossRef]
- Harvey, T.J.; Wood, R.J.K.; Powrie, H.E.G.; Warrens, C. Charging Ability of Pure Hydrocarbons and Lubricating Oils. Tribol. Trans. 2004, 47, 263–271. [Google Scholar] [CrossRef]
- Akio, K.; Shigenori, M. Use of Electrostatic Charge Monitoring for Early Detection of Adhesive Wear in Oil Lubricated Contacts. J. Tribol. 2002, 124, 288–296. [Google Scholar]
- Wang, L.; Wood, R.J.K.; Care, I.; Powire, H.E.G. Electrostatic wear sensing of ceramic-steel lubricated contacts. Tribol. Interface Eng. Ser. 2004, 43, 711–720. [Google Scholar]
- Harvey, T.J.; Wood, R.J.K.; Powrie, H.E.G. Electrostatic wear monitoring of rolling element bearings. Wear 2007, 263, 1492–1501. [Google Scholar] [CrossRef] [Green Version]
- Powrie, H. Use of electrostatic technology for aero engine oil system monitoring. In Proceedings of the 2000 IEEE Aerospace Conference, Big Sky, MT, USA, 25 March 2000; pp. 57–72. [Google Scholar]
- Yan, Y.; Byrne, B.; Woodhead, S.; Coulthard, J. Velocity measurement of pneumatically conveyed solids using electrodynamic sensors. Meas. Sci. Technol. 1995, 6, 515. [Google Scholar] [CrossRef]
- Harvey, T.J.; Wood, R.J.K.; Denuault, G.; Powire, H.E.G. Investigation of electrostatic charging mechanisms in oil lubricated tribo-contacts. Tribol. Int. 2002, 35, 605–614. [Google Scholar] [CrossRef]
- Carnie, S.L.; Torrie, G.M. The Statistical Mechanics of the Electrical Double Layer; John Wiley & Sons: Hoboken, NJ, USA, 2007; pp. 141–253. [Google Scholar]
- Rossner, M.; Singer, H. Measurement of micrometer particles by means of induced charges. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, San Diego, CA, USA, 1–5 October 1989; pp. 2233–2238. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Torque (%) | Speed (rpm) | Duration (h) |
|---|---|---|---|
| 1 | 20 | 1800 | 1 |
| 2 | 40 | 1800 | 1 |
| 3 | 60 | 1800 | 1 |
| 4 | 80 | 1800 | 1 |
| 5 | 100 | 1800 | 1.5 |
| 6 | 125 | 1800 | 10 |
| 7 | 135 | 1800 | 10 |
| 8 | 150 | 1800 | 20 |
| 9 | 170 | 1800 | 100 |
| Speed (rpm) | Torque | Initial Temperature of Oil (°C) | End Temperature of Oil (°C) |
|---|---|---|---|
| 1800 | 100% | 27.23 | 33.03 |
| No. | Torque | Speed (rpm) | State of the Oil Pump | Oil TEMPERATURE (°C) |
|---|---|---|---|---|
| 1 | 20% | 1800 | High | 44.32 |
| 2 | 40% | 1800 | High | 44.21 |
| 3 | 60% | 1800 | High | 44.97 |
| 4 | 80% | 1800 | High | 45.51 |
| State of the Oil Pump | Torque (Nm) | Oil Temperature (°C) |
|---|---|---|
| High | 2400 | 33.46 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, H.; Zuo, H.; Wang, H. Electrostatic Sensor Application for On-Line Monitoring of Wind Turbine Gearboxes. Sensors 2018, 18, 3574. https://doi.org/10.3390/s18103574
Mao H, Zuo H, Wang H. Electrostatic Sensor Application for On-Line Monitoring of Wind Turbine Gearboxes. Sensors. 2018; 18(10):3574. https://doi.org/10.3390/s18103574
Chicago/Turabian StyleMao, Huijie, Hongfu Zuo, and Han Wang. 2018. "Electrostatic Sensor Application for On-Line Monitoring of Wind Turbine Gearboxes" Sensors 18, no. 10: 3574. https://doi.org/10.3390/s18103574
APA StyleMao, H., Zuo, H., & Wang, H. (2018). Electrostatic Sensor Application for On-Line Monitoring of Wind Turbine Gearboxes. Sensors, 18(10), 3574. https://doi.org/10.3390/s18103574