SCFSen: A Sensor Node for Regional Soil Carbon Flux Monitoring

Abstract
:1. Introduction
- (1)
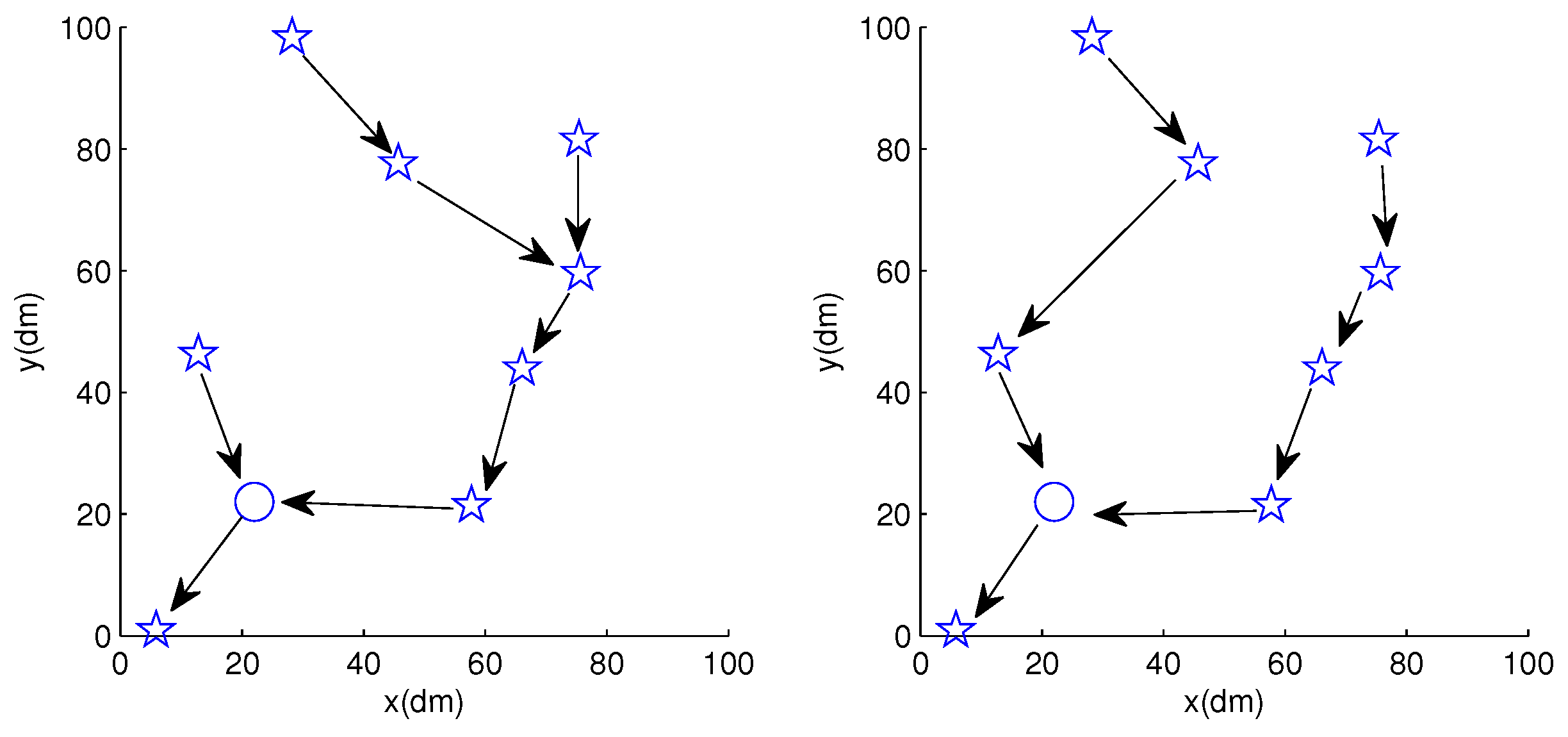
- Measurements should be taken in multiple positions to dominate the whole monitored region. For the spatial heterogeneity of soil respiration, the sampling positions should be sufficient to express the region based on the spatial correlation.
- (2)
- Measurements should be carried out and the data should be kept on gathering for a relatively long time. For the temporal variation of soil respiration, each measurement only denotes the soil respiration situation at that moment. We need measure the soil carbon flux at different time in each sampling position in the monitored region.
- (3)
- Measurements in different positions should be able to be synchronized controlled. Simultaneous measurement results of different positions can exactly express the overall situation of the region at the same moment.
- (1)
- The designing and implementation of SCFSen, a new instrument for soil carbon flux measurement, are introduced. From the aspect of functionality, SCFSen can support WSN communication besides soil carbon flux measurement, which make it suitable for regional soil carbon flux monitoring by constructing a sensor network.
- (2)
- The energy consumption of SCFSen is analyzed and compared with that of LI-8100. The working time of SCFSen can be about 23 days if three consecutive measurements are taken per hour, which is more than two times longer than that of LI-8100 for the same measurement task. SCFSen can keep working for about 55 days if it is set to take one measurement per hour. Furthermore, SCFSen can be recharged by a solar panel in practice, which leads to much longer working time and the possibility for sustainable monitoring.
- (3)
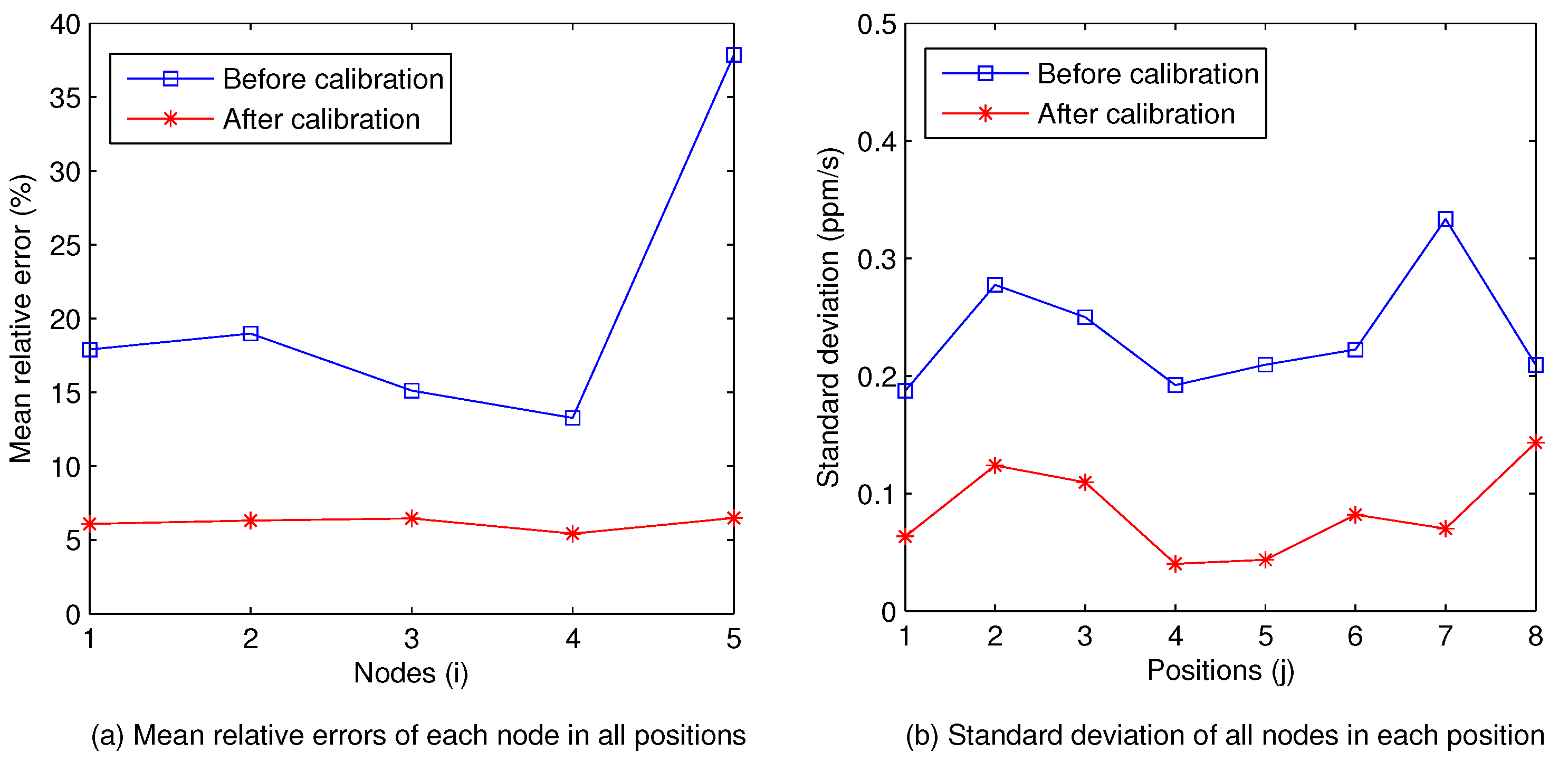
- A grouped calibration method for SCFSen nodes is proposed and tested. After calibration, the mean relative errors of SCFSen nodes can be reduced from over 15% to about 6%, taking the result of LI-8100 as ground truths. The difference between the results from two different instruments is reasonable.
2. Method of Soil Carbon Flux Measurement
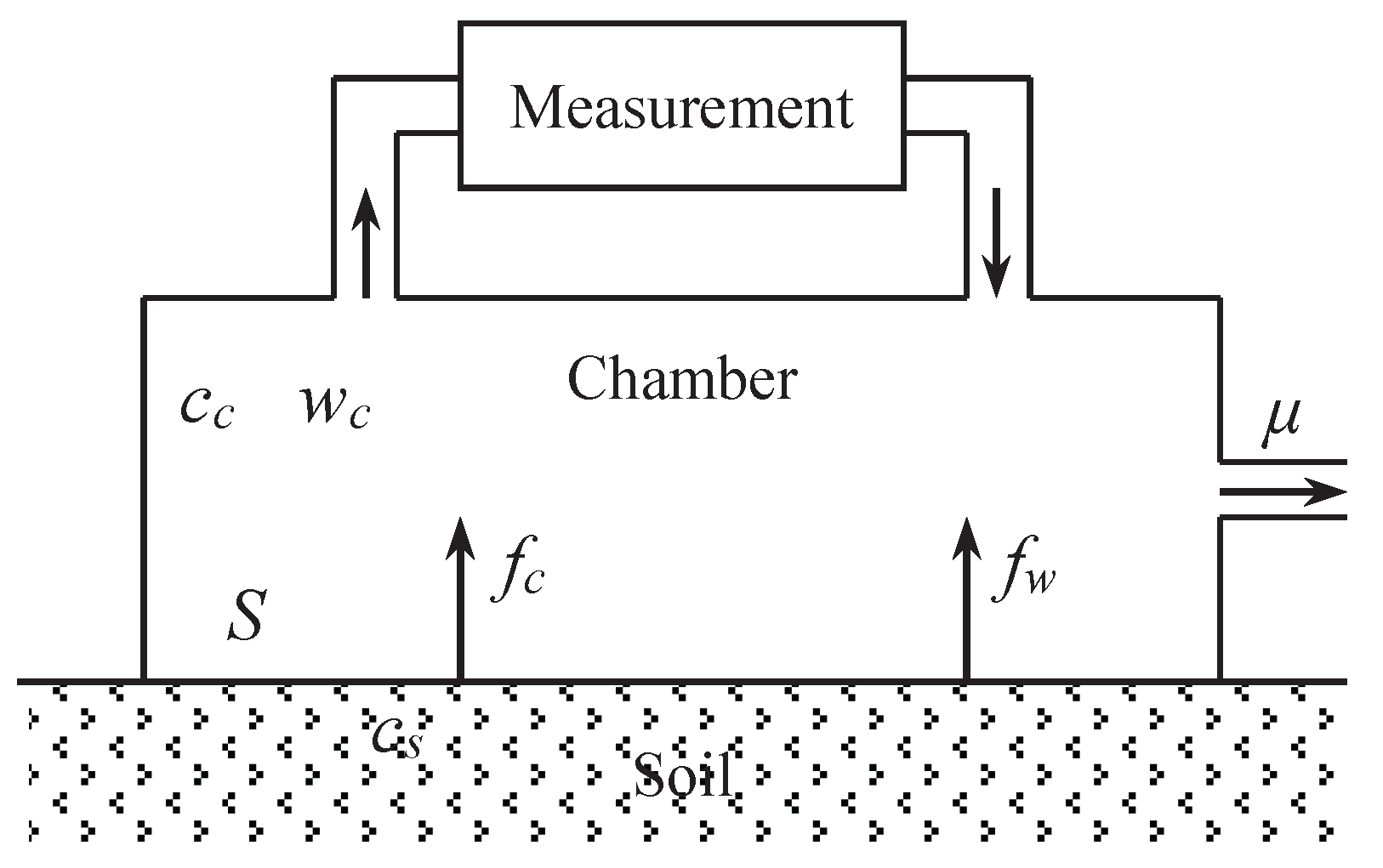
2.1. Model of Dynamic Chamber Method
2.2. Measurement of Changing Rate of Carbon Dioxide Concentration in the Chamber
2.3. Calculation of Soil Carbon Flux
3. The Design and Implementation of SCFSen
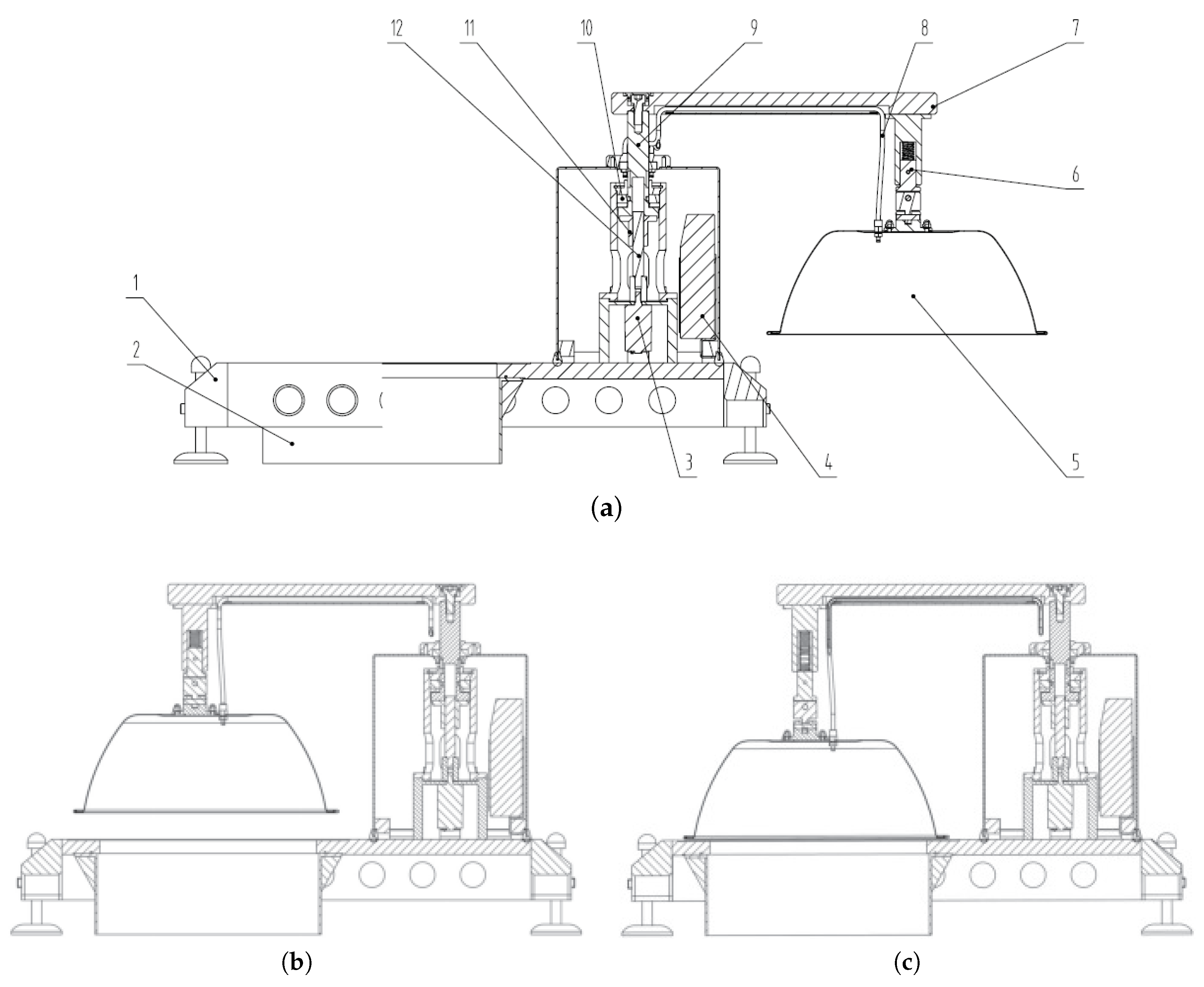
3.1. The Mechanical Structure
3.2. The Control Circuit Structure
3.3. Energy Consumption Estimation
4. Calibration of SCFSen
4.1. Preliminary Experiment
4.2. Method of Calibration
5. Experiment and Analysis
5.1. Calibration
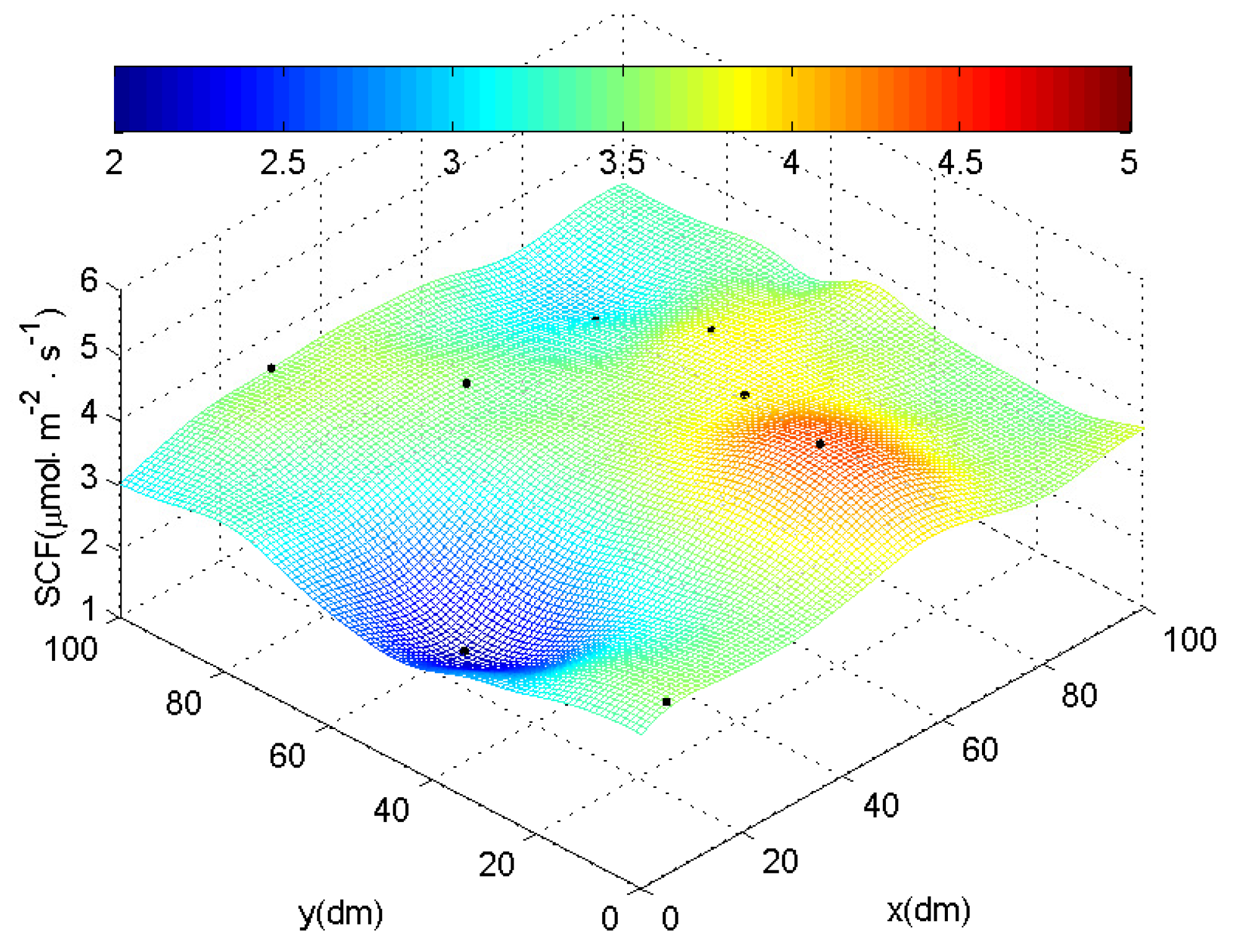
5.2. Deployment and Measurement
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Raich, J.W.; Nadelhoffer, K.J. Belowground carbon allocation in forest ecosystems: Global trends. Ecology 1989, 70, 1346–1354. [Google Scholar] [CrossRef]
- Xu, M.; Shang, H. Contribution of soil respiration to the global carbon equation. J. Plant Physiol. 2016, 203, 16–28. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phillips, C.L.; Bond-Lamberty, B.; Desai, A.R.; Lavoie, M.; Risk, D.; Tang, J.; Todd-Brown, K.; Vargas, R. The value of soil respiration measurements for interpreting and modeling terrestrial carbon cycling. Plant Soil 2017, 413, 1–25. [Google Scholar] [CrossRef]
- Barba, J.; Cueva, A.; Bahn, M.; Barron-Gafford, G.; Bond-Lamberty, B.; Hanson, P.; Jaimes, A.; Kulmala, L.; Pumpanen, J.; Scott, R.; Wohlfahrt, G.; Vargas, R. Comparing ecosystem and soil respiration: Review and key challenges of tower-based and soil measurements. Agric. Forest Meteorol. 2018, 249, 434–443. [Google Scholar] [CrossRef]
- Sanderman, J.; Creamer, C.; Baisden, W.T.; Farrell, M.; Fallon, S. Greater soil carbon stocks and faster turnover rates with increasing agricultural productivity. Soil 2017, 3, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Schlesinger, W.H. Carbon balance in terrestrial detritus. Annu. Rev. Ecol. Syst. 1977, 8, 51–81. [Google Scholar] [CrossRef]
- Wan, S.; Norby, R.J.; Ledford, J.; Weltzin, J.F. Responses of soil respiration to elevated CO2, air warming, and changing soil water availability in a model old-field grassland. Glob. Chang. Biol. 2007, 13, 2411–2424. [Google Scholar] [CrossRef]
- Dossou-Yovo, E.; Brüggemann, N.; Jesse, N.; Huat, J.; Ago, E.; Agbossou, E. Reducing soil CO2 emission and improving upland rice yield with no-tillage, straw mulch and nitrogen fertilization in northern Benin. Soil Till. Res. 2016, 156, 44–53. [Google Scholar] [CrossRef]
- Brus, D.J.; Gruijter, J.J.D. A hybrid design-based and model-based sampling approach to estimate the temporal trend of spatial means. Geoderma 2012, 173–174, 241–248. [Google Scholar] [CrossRef]
- Brus, D.J.; de Gruijter, J.J. Effects of spatial pattern persistence on the performance of sampling designs for regional trend monitoring analyzed by simulation of space-time fields. Comput. Geosci. 2013, 61, 175–183. [Google Scholar] [CrossRef]
- Joseph, B.; Yavitt, J.B.; Burtis, J.C.; Smemo, K.A.; Welsch, M. Plot-scale spatial variability of methane, respiration, and net nitrogen mineralization in muck-soil wetlands across a land use gradient. Geoderma 2018, 315, 11–19. [Google Scholar] [CrossRef]
- LI-8100A Automated Soil CO2 Flux System. Available online: https://www.licor.com/env/products/ soil_flux/ (accessed on 6 February 2018).
- Lark, R.M. Spatially nested sampling schemes for spatial variance components: Scope for their optimization. Comput. Geosci. 2011, 37, 1622–1641. [Google Scholar] [CrossRef]
- Tavares, R.L.M.; Souza, Z.M.D.; Scala, N.L., Jr.; Castioni, G.A.F.; Souza, G.S.D.; Torres, J.L.R. Spatial and temporal variability of soil CO2 flux in sugarcane green, harvest systems. Rev. Bras. Cienc. Solo. 2016, 40, 1–14. [Google Scholar] [CrossRef]
- Mu, L.; Fang, L.; Liang, Y. Temporal and spatial variation of soil respiration under mulching in a greenhouse cucumber cultivation. Pesqui Agropecu Bras. 2016, 51, 869–879. [Google Scholar] [CrossRef] [Green Version]
- Mo, L.; He, Y.; Liu, Y.; Zhao, J.; Tang, S.; Li, X.; Dai, G. Canopy Closure Estimates with GreenOrbs: Sustainable Sensing in the Forest. In Proceedings of the 7th International Conference on Embedded Networked Sensor Systems (Sensys ’09), Berkeley, CA, USA, 4–6 November 2009; pp. 99–112. [Google Scholar]
- Adu-Manu K., S.; Adam, N.; Tapparello, C.; Ayatollahi, H.; Heinzelman, W. Energy-Harvesting Wireless Sensor Networks (EH-WSNs): A Review. ACM Trans. Sen. Netw. 2018, 14, 10:1–10:50. [Google Scholar] [CrossRef]
- Du, W.; Li, Z.; Liando, J.C.; Li, M. From rateless to distanceless: Enabling sparse sensor network deployment in large areas. IEEE/ACM Trans. Netw. 2016, 24, 2498–2511. [Google Scholar] [CrossRef]
- Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Jawad, A.M.; Ismail, M. Energy-Efficient wireless sensor networks for precision agriculture: A review. Sensors 2017, 17, 1781. [Google Scholar] [CrossRef] [PubMed]
- Bai, X.; Wang, Z.; Zou, L.; Alsaadi F., E. Collaborative fusion estimation over wireless sensor networks for monitoring CO2 concentration in a greenhouse. Inf. Fus. 2018, 42, 119–126. [Google Scholar] [CrossRef]
- Barrenetxea, G.; Ingelrest, F.; Schaefer, G.; Vetterli, M.; Couach, O.; Parlange, M. SensorScope: Out-of-the-box environmental monitoring. In Proceedings of the 7th International Conference on Information Processing in Sensor Networks (IPSN ’08), St. Louis, MO, USA, 22–24 Aprial 2008; pp. 332–343. [Google Scholar]
- Song, W.-Z.; Huang, R.; Xu, M.; Shirazi, B.; Lahusen, R. Design and Deployment of Sensor Network for Real-Time High-Fidelity Volcano Monitoring. IEEE Trans. Parallel Distrib. Syst. 2010, 21, 1658–1674. [Google Scholar] [CrossRef]
- Dyo, V.; Ellwood, S.A.; Macdonald, D.W.; Markham, A.; Trigoni, N.; Wohlers, R.; Mascolo, C.; Pásztor, B.; Scellato, S.; Yousef, K. Wildsensing: Design and deployment of a sustainable sensor network for wildlife monitoring. ACM Trans. Sens. Netw. 2012, 8, 29:1–29:33. [Google Scholar] [CrossRef]
- Xu, C.; Zheng, Z.; Qi, C. Practical deployments of SEMAT on wireless sensor networks in the marine environment. In Proceedings of the 9th IEEE International Conference on Mobile Ad-Hoc and Sensor Networks (MSN ’13), Dalian, China, 11–13 December 2013; pp. 442–448. [Google Scholar]
- Li, Z.; Wang, N.; Franzen, A.; Taher, P.; Godsey, C.; Zhang, H.; Li, X. Practical deployment of an in-field soil property wireless sensor network. Comput. Stand. Inter. 2014, 36, 278–287. [Google Scholar] [CrossRef]
- Estrada-López, J.J.; Castillo-Atoche A., A.; Vázquez-Castillo, J.; Sánchez-Sinencio, E. Smart Soil Parameters Estimation System Using an Autonomous Wireless Sensor Network With Dynamic Power Management Strategy. IEEE Sens. J. 2018, 18, 8913–8923. [Google Scholar] [CrossRef]
- Davis, T.W.; Liang, X.; Kuo, C.; Liang, Y. Analysis of Power Characteristics for Sap Flow, Soil Moisture, and Soil Water Potential Sensors in Wireless Sensor Networking Systems. IEEE Sens. J. 2012, 12, 1933–1945. [Google Scholar] [CrossRef]
- Kang, J.; Jin, R.; Li, X. Regression Kriging-Based Upscaling of Soil Moisture Measurements From a Wireless Sensor Network and Multiresource Remote Sensing Information Over Heterogeneous Cropland. IEEE Geosci. Remote Sens. 2015, 12, 92–96. [Google Scholar] [CrossRef]
- Xu, D.; Dong, L.; Borana, L.; Liu, H. Early-Warning System With Quasi-Distributed Fiber Optic Sensor Networks and Cloud Computing for Soil Slopes. IEEE Access 2017, 5, 25437–25444. [Google Scholar] [CrossRef]
- Zemmour, H.; Baudoin, G.; Diet, A. Soil Effects on the Underground-to-Aboveground Communication Link in Ultrawideband Wireless Underground Sensor Networks. IEEE Antenn. Wirel. Propag. 2017, 16, 218–221. [Google Scholar] [CrossRef]
- Pumpanen, J.; Kolari, P.; Ilvesniemi, H.; Minkkinen, K.; Vesala, T.; Niinisto, S.; Lohila, A.; Larmola, T.; Morero, M.; Pihlatie, M.; et al. Comparison of different chamber techniques for measuring soil CO2 efflux. Agric. For. Meteorol. 2004, 123, 159–176. [Google Scholar] [CrossRef]
- Kandel, T.P.; Lærke, P.E.; Elsgaard, L. Effect of chamber enclosure time on soil respiration flux: A comparison of linear and non-linear flux calculation methods. Atmos. Environ. 2016, 141, 245–254. [Google Scholar] [CrossRef]
- Heinemeyer, A.; Mcnamara N., P. Comparing the closed static versus the closed dynamic chamber flux methodology: Implications for soil respiration studies. Plant Soil 2011, 346, 145–151. [Google Scholar] [CrossRef]
- Li, J.; Wang, G.; Allison, S.D.; Mayes, M.A.; Luo, Y. Soil carbon sensitivity to temperature and carbon use efficiency compared across microbial-ecosystem models of varying complexity. Biogeochemistry 2014, 119, 67–84. [Google Scholar] [CrossRef]
- Jeong, S.H.; Eom, J.Y.; Lee, J.H.; Lee, J.S. Effect of rainfall events on soil carbon flux in mountain pastures. J. Ecol. Environ. 2017, 41, 37. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Chipset |
|---|---|
| Wireless transceiver module | CC2420 |
| Carbon dioxide sensor | T6615 |
| Temperature and humidity sensor | SHT15 |
| Motor drive module | ZGA17RU877i5600 |
| Buck converter | MAX1836 |
| Rechargeable battery | YSD-12980 |
| LCD screen | QC12864B |
| Modules | Current (mA) | Duration | Illustration |
|---|---|---|---|
| Main control module | 0.5 | 60 min | |
| Initialization | 47.4 | 100 s | Warming up |
| Positive rotation of motor | 66.4 | 25 s | Chamber closing |
| Negative rotation of motor | 16.8 | 25 s | Chamber opening |
| Measurement & transmission | 100.0 | 3 min |
| i | |||
|---|---|---|---|
| 1 | 0.9524 | 1.1231 | −0.5856 |
| 2 | 0.9417 | 1.0561 | −0.4592 |
| 3 | 0.9262 | 0.8521 | 0.0468 |
| 4 | 0.9632 | 0.6618 | 0.4849 |
| 5 | 0.9456 | 0.753 | −0.0589 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Wu, X.; Mo, L.; Zhao, J. SCFSen: A Sensor Node for Regional Soil Carbon Flux Monitoring. Sensors 2018, 18, 3986. https://doi.org/10.3390/s18113986
Wang G, Wu X, Mo L, Zhao J. SCFSen: A Sensor Node for Regional Soil Carbon Flux Monitoring. Sensors. 2018; 18(11):3986. https://doi.org/10.3390/s18113986
Chicago/Turabian StyleWang, Guoying, Xiaoping Wu, Lufeng Mo, and Jizhong Zhao. 2018. "SCFSen: A Sensor Node for Regional Soil Carbon Flux Monitoring" Sensors 18, no. 11: 3986. https://doi.org/10.3390/s18113986
APA StyleWang, G., Wu, X., Mo, L., & Zhao, J. (2018). SCFSen: A Sensor Node for Regional Soil Carbon Flux Monitoring. Sensors, 18(11), 3986. https://doi.org/10.3390/s18113986