Enhanced Accuracy of CMOS Smart Temperature Sensors by Nonlinear Curvature Correction

Abstract
:1. Introduction
2. Materials and Methods
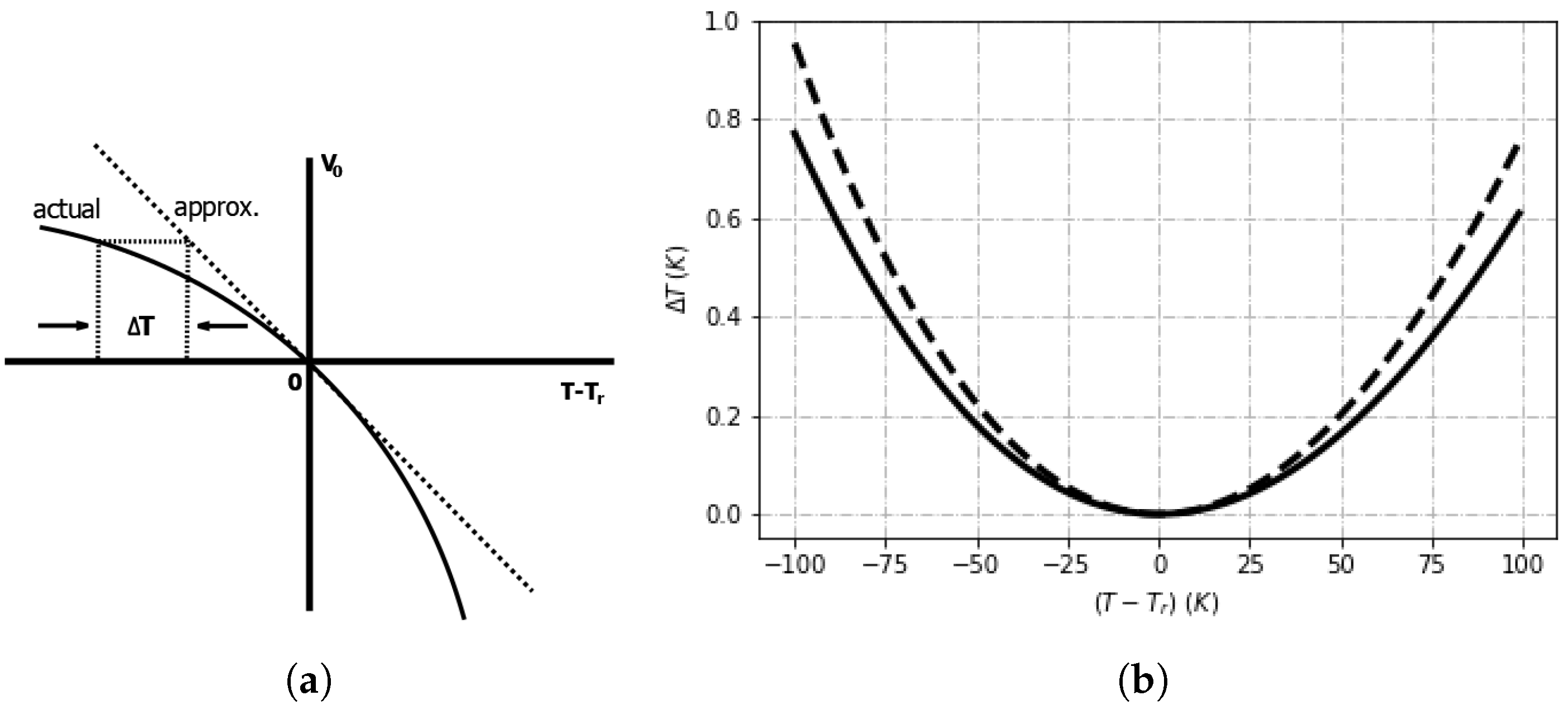
2.1. Curvature Correction
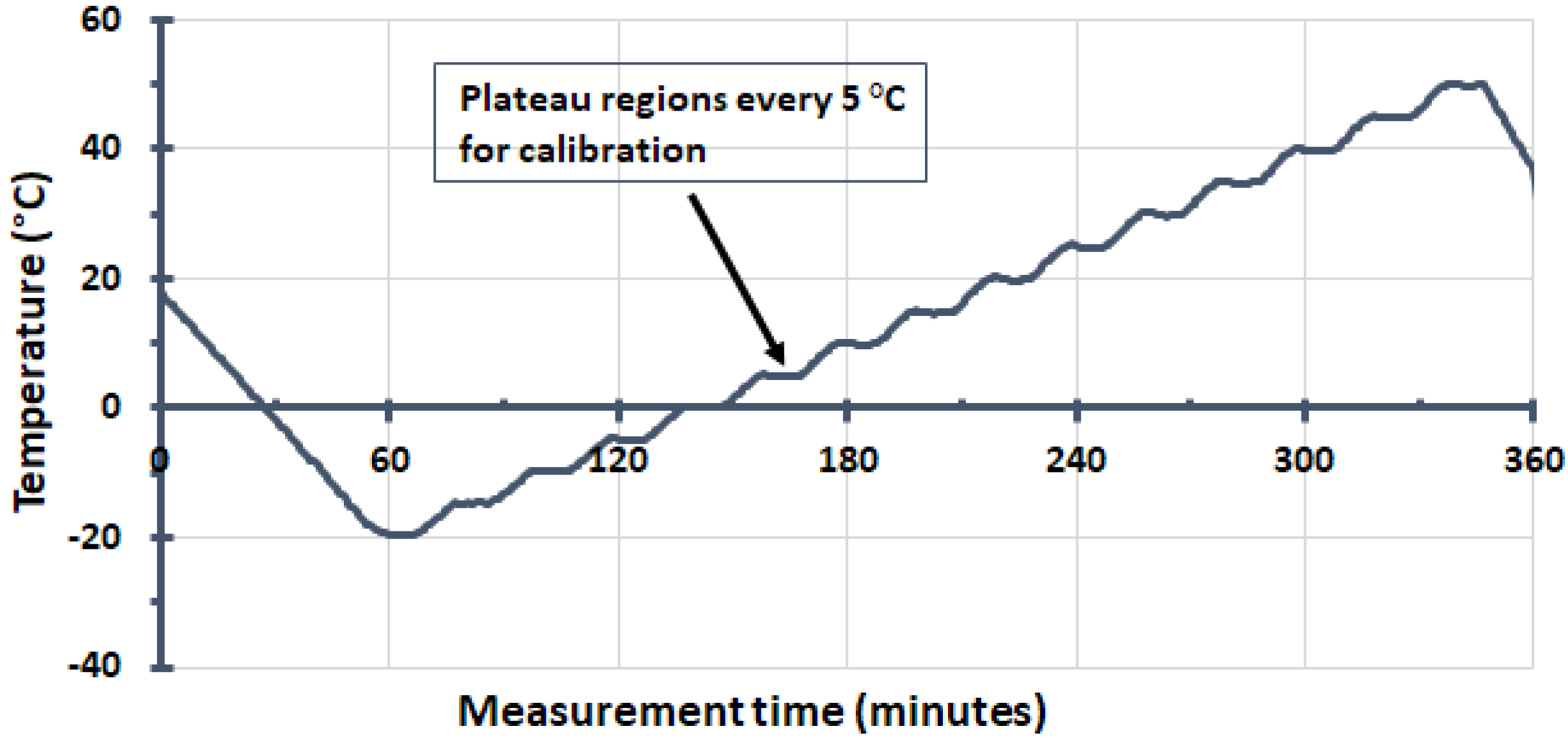
2.2. Measurement Procedure
- Measure all the output sensor temperatures for each calibration reference temperature.
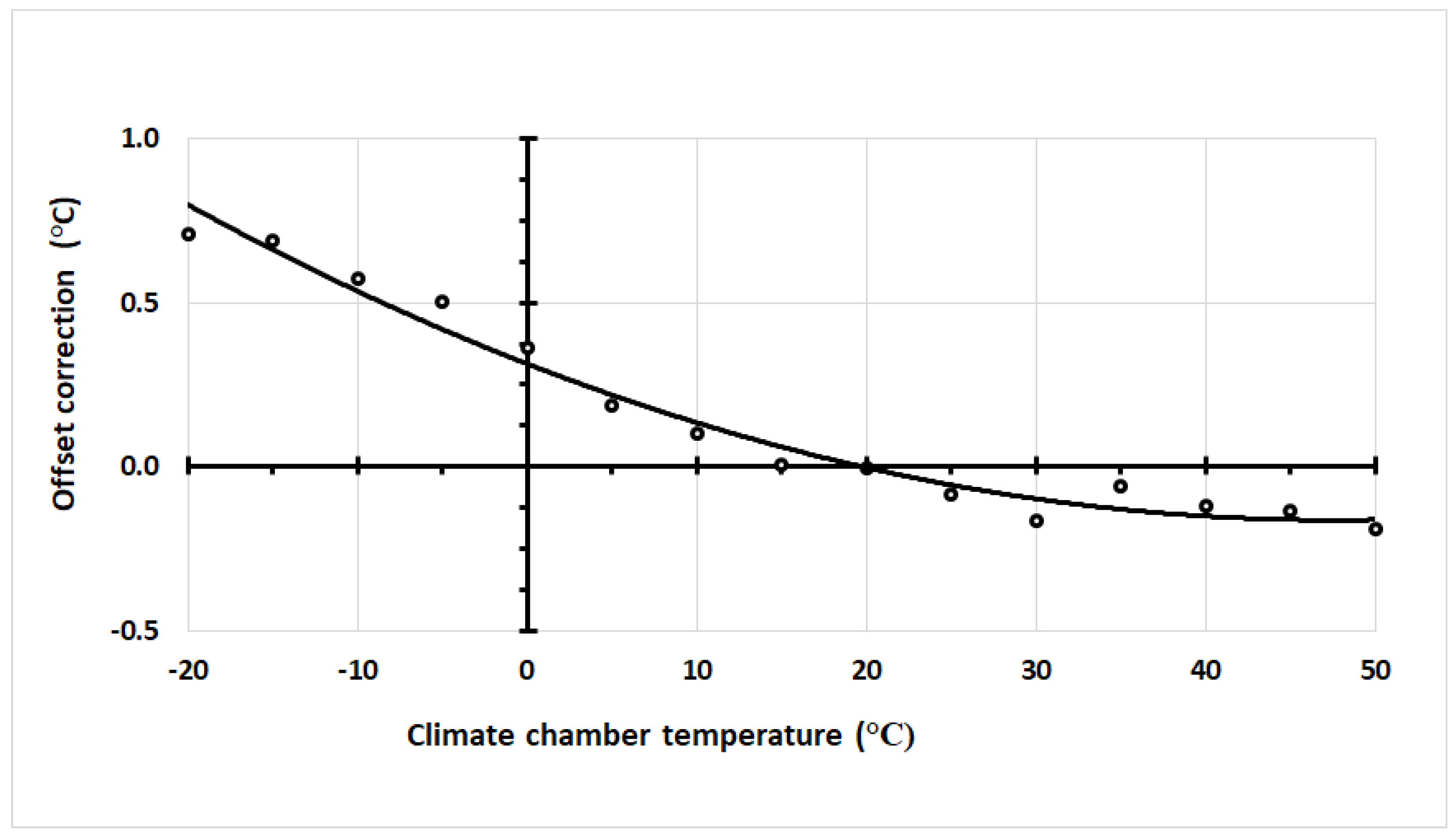
- Calculate the temperature offset correction between sensor measurements and reference temperatures.
- Best fitting second-order polynomial are calculated from the measured temperature offsets (step 2).
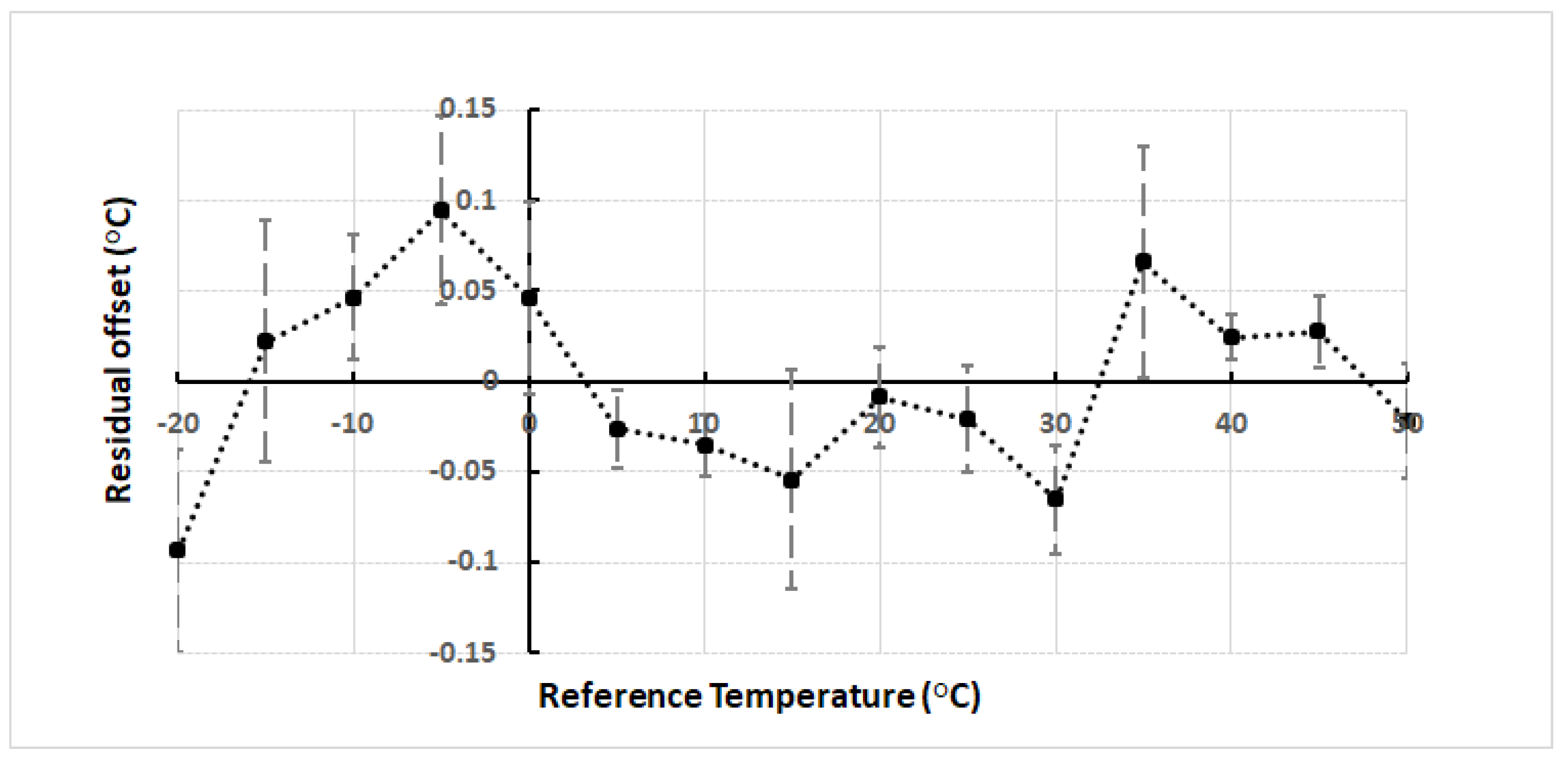
- Evaluate the residual errors at each reference due to the best fitting curve.
2.3. Experimental Arrangement
2.3.1. Climate Chamber
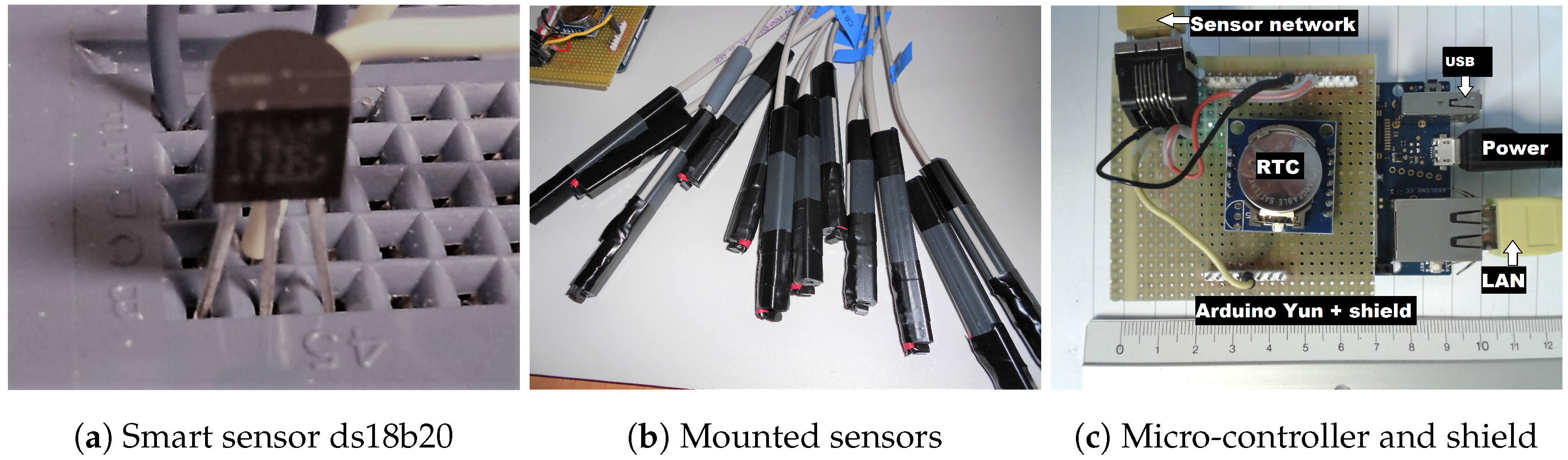
2.3.2. Smart Temperature Sensors
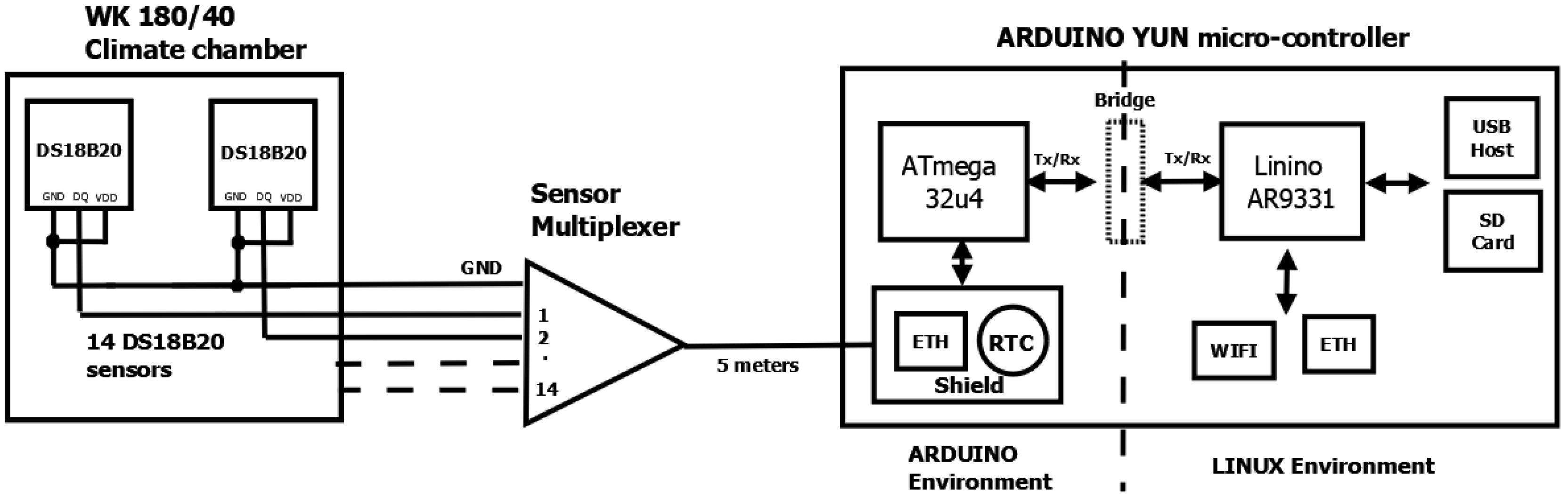
2.3.3. Micro Controller
3. Results
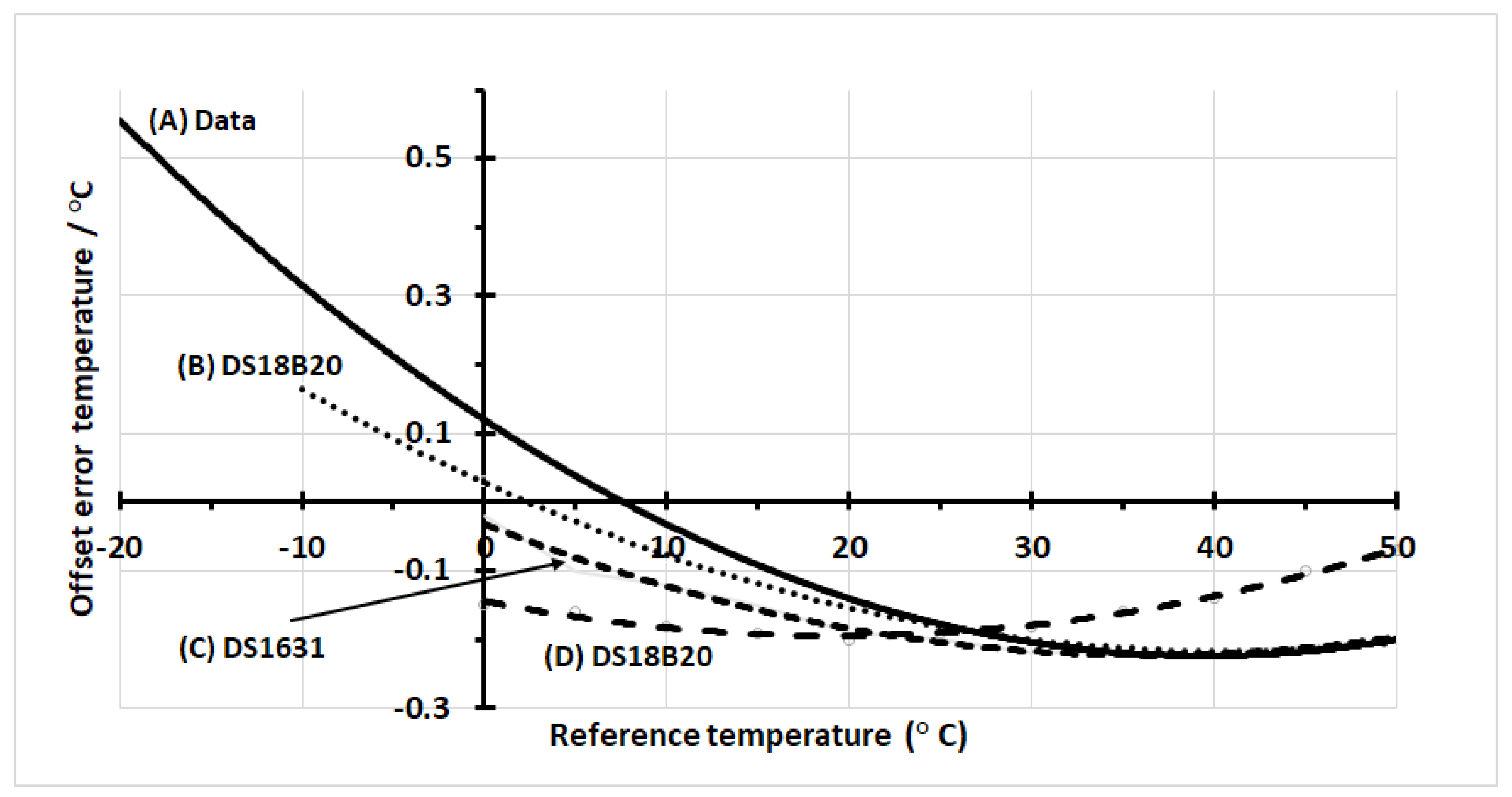
- Label A represents our results previously presented as the mean error curve in Figure 6.
- Label B results from the webpage ‘frequently asked questions for ds18b20 (FAQS: DS18B20)’ on the maxim integrated website, which shows the mean error for the ds18b20 sensor as a function of temperature and supply voltage [20]. There is a marginal difference in curvature with results and those of this paper showing a minima at the same reference temperature.
- Label D gives the result from the data sheet for the ds18b20 [16]. Observe that the minima are approximately 20 °C less than that of the other three, which presumably must be a difference in the foundry calibration temperature.
4. Discussion
4.1. Accuracy
4.2. Repeatability
4.3. Calibration
4.4. Limitations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| IC | Integrated Circuit |
| CMOS | Complementary Metal-Oxide Semiconductor |
| RTD | Resistance Temperature Detector |
| ADC | Analogue-to-Digital Converter |
| BJT | Bipolar Junction Transistor |
| RTC | Real Time Clock |
| PTAT | Proportional to Absolute Temperature |
References
- Incropera, F.; DeWitt, D. Fundamentals of Heat and Mass Transfer, 5th ed.; Wiley: New York, NY, USA, 2008. [Google Scholar]
- Adkins, C. Equilibrium Thermodynamics, 3rd ed.; Cambridge Univerity Press: Cambridge, UK, 1983. [Google Scholar]
- Michalski, L.; Eckersdorf, K.; Kucharski, J.; McGhee, J. Temperature Measurement, 2nd ed.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002. [Google Scholar]
- Pertijs, M.A.P.; Huijsing, J.H. Precision Temperature Sensors in CMOS Technology, 1st ed.; Analog circuits and signal processing series; Springer: Dordrecht, The Netherlands, 2006; ISBN 978-1-4020-5257-6. [Google Scholar] [CrossRef]
- Meijer, G.C. Thermal sensors based on transistors. Sens. Actuators 1986, 10, 103–125. [Google Scholar] [CrossRef]
- Makinwa, K. Smart temperature sensors in standard CMOS. Procedia Eng. 2010, 5, 930–939. [Google Scholar] [CrossRef]
- Pertijs, M.A.P.; Aita, A.L.; Makinwa, K.A.A.; Huijsing, J.H. Low-Cost Calibration Techniques for Smart Temperature Sensors. IEEE Sens. J. 2010, 10, 1098–1105. [Google Scholar] [CrossRef]
- Udrea, F.; Santra, S.; Gardner, J.W. CMOS Temperature sensors-concepts, state-of-the-art and prospects. In Proceedings of the International Semiconducto Conference (CAS), Sinaia, Romania, 13–15 October 2008; pp. 31–40. [Google Scholar]
- Bitella, G.; Rossi, R.; Bochicchio, R.; Perniola, M.; Amato, M. A Novel Low-Cost Open-Hardware Platform for Monitoring Soil Water Content and Multiple Soil-Air-Vegetation Parameters. Sensors 2014, 14, 19639–19659. [Google Scholar] [CrossRef] [PubMed]
- Subair, S.; Abraham, L. Analysis of Different Temperature Sensors for Space Applications. Int. J. Innov. Sci. Eng. Technol. 2014, 1, 35–40. [Google Scholar]
- Bondarenko, O.; Kininmonth, S.; Kingsford, M. Underwater Sensor Networks, Oceanography and Plankton Assemblages. In Proceedings of the 2007 3rd International Conference on Intelligent Sensors, Sensor Networks and Information, Melbourne, Australia, 3–6 December 2007; pp. 657–662. [Google Scholar] [CrossRef]
- Pertijs, M.A.P.; Makinwa, K.A.A.; Huijsing, J.H. A CMOS temperature sensor with a 3σ inaccuracy of ±0.1 °C from −55 °C to 125 °C. IEEE J. Solid-State Circuits 2005, 40, 2805–2815. [Google Scholar] [CrossRef]
- Souri, K.; Chae, Y.; Makinwa, K.A.A. A CMOS Temperature Sensor With a Voltage-Calibrated Inaccuracy of ±0.15 °C 3σ from 55 °C to 125 °C. IEEE J. Solid-State Circuits 2013, 48, 292–301. [Google Scholar] [CrossRef]
- Aita, A.L.; Pertijs, M.A.P.; Makinwa, K.A.A.; Huijsing, J.H. A CMOS smart temperature sensor with a batch-calibrated inaccuracy of ±0.25 °C (3σ) from −70 °C to 130 °C. In Proceedings of the 2009 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 8–12 February 2009; pp. 342–343. [Google Scholar] [CrossRef]
- WT3 and WK3 Temperature and Climate Test Chambers. Available online: http://weiss-uk.com/products/temperature-and-climatic-testing/ (accessed on 22 January 2018).
- DS18S20: High-Precision 1-Wire Digital Thermometer. Available online: https://datasheets.maximintegrated.com/en/ds/DS18B20.pdf (accessed on 10 December 2017).
- Arduino—ArduinoBoardYun. Available online: https://www.arduino.cc/en/Main/ArduinoBoardYun (accessed on 10 January 2018).
- TUTORIAL 1796, Overview of 1-Wire Technology and Its Use. Available online: https://www.maximintegrated.com/en/app-notes/index.mvp/id/1796 (accessed on 22 January 2018).
- Lewis, G.D.; Merken, P. Investigation of the dynamic thermal infrared signatures of a calibration target instrumented with a network of 1-wire temperature sensors. In Proceedings of the Infrared Imaging Systems: Design, Analysis, Modeling, and Testing XXVII, Baltimore, MD, USA, 17–21 April 2016. [Google Scholar]
- FAQS DS18B20. Available online: https://www.maximintegrated.com/en/support/faqs/ds18b20-faq.html (accessed on 22 January 2017).
- DS1631/DS1631A/DS1731 High-Precision Digital Thermometer and Thermostat. Available online: https://datasheets.maximintegrated.com/en/ds/DS1631-DS1731.pdf (accessed on 10 December 2017).
- Tansley, D.; Fletcher, S.; Longstaff, A.P. Smart sensor for surface temperature measurement on manufacturing machines. In Proceedings of Computing and Engineering Annual Researchers’ Conference (CEARC’13); Lucas, G., Ed.; University of Huddersfield: Huddersfield, UK, 2013; pp. 55–60. [Google Scholar]
- Application Note 208: Curve Fitting the Error of a Bandgap—Based Digital Temperature Sensor. Available online: https://www.maximintegrated.com/en/app-notes/index.mvp/id/208 (accessed on 10 January 2018).
- Fruett, F.; Meijer, G.C.M.; Bakker, A. Minimization of the mechanical-stress-induced inaccuracy in bandgap voltage references. IEEE J. Solid-State Circuits 2003, 38, 1288–1291. [Google Scholar] [CrossRef]
- Bakker, A. High-Accuracy CMOS Smart Temperature Sensor. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2000. [Google Scholar]
- Yousefzadeh, B.; Makinwa, K.A. A BJT-based temperature sensor with a packaging-robust of ±0.3 °C (3σ) from −55° to +125 °C after heater assisted voltage calibration. In Proceedings of the Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; pp. 162–163. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficients | a | b | c |
|---|---|---|---|
| Mean curve | |||
| T (ref.) | 0 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 | ||||
| T (data) | 0.25 | 5.08 | 9.99 | 14.90 | 19.90 | 24.84 | 29.75 | 34.88 | 39.83 | 44.85 | 49.82 | ||||
| T (offset) | 0.01 | 0.10 | 0.10 | 0.16 | 0.25 | 0.12 | 0.17 | 0.15 | 0.18 | ||||||
| T (res.) | 0.10 | 0.02 | 0.03 | 0.05 | 0.00 | 0.00 | 0.05 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lewis, G.D.; Merken, P.; Vandewal, M. Enhanced Accuracy of CMOS Smart Temperature Sensors by Nonlinear Curvature Correction. Sensors 2018, 18, 4087. https://doi.org/10.3390/s18124087
Lewis GD, Merken P, Vandewal M. Enhanced Accuracy of CMOS Smart Temperature Sensors by Nonlinear Curvature Correction. Sensors. 2018; 18(12):4087. https://doi.org/10.3390/s18124087
Chicago/Turabian StyleLewis, Gareth D., Patrick Merken, and Marijke Vandewal. 2018. "Enhanced Accuracy of CMOS Smart Temperature Sensors by Nonlinear Curvature Correction" Sensors 18, no. 12: 4087. https://doi.org/10.3390/s18124087
APA StyleLewis, G. D., Merken, P., & Vandewal, M. (2018). Enhanced Accuracy of CMOS Smart Temperature Sensors by Nonlinear Curvature Correction. Sensors, 18(12), 4087. https://doi.org/10.3390/s18124087