Assessment of the Accuracy of a Multi-Beam LED Scanner Sensor for Measuring Olive Canopies



 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
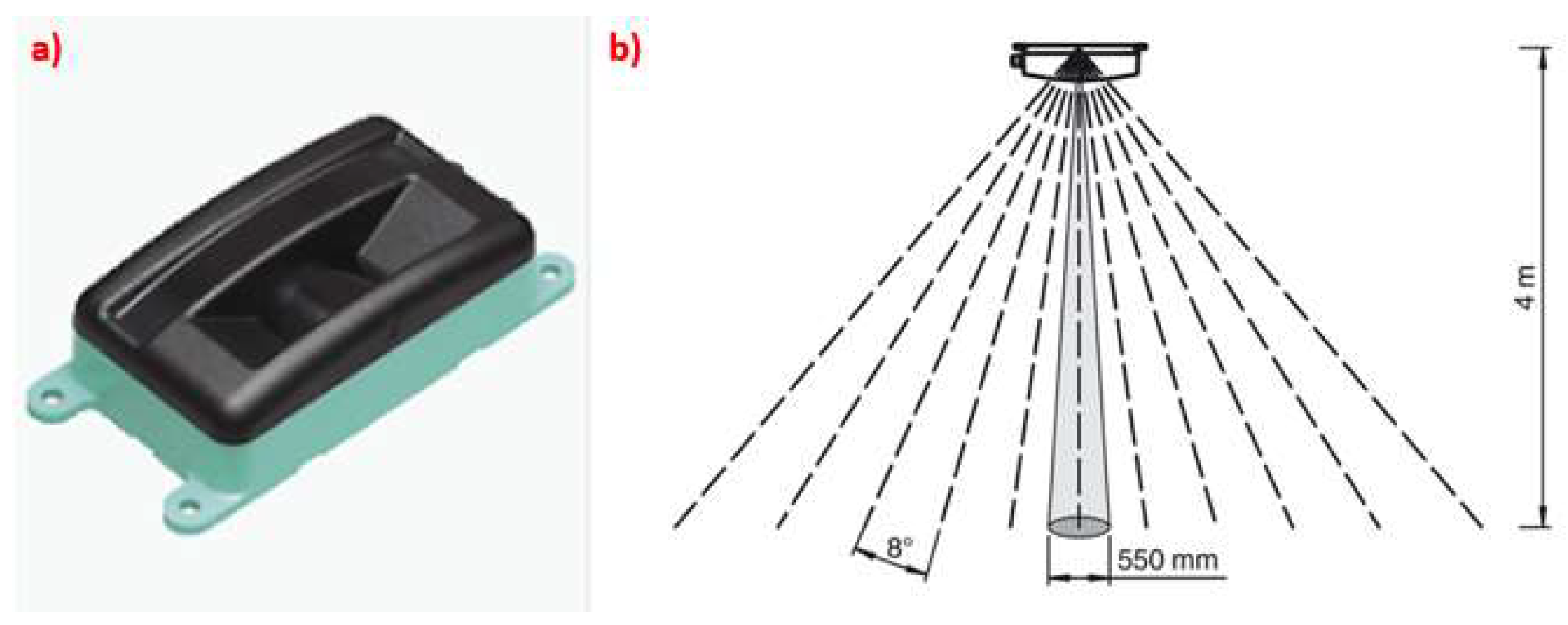
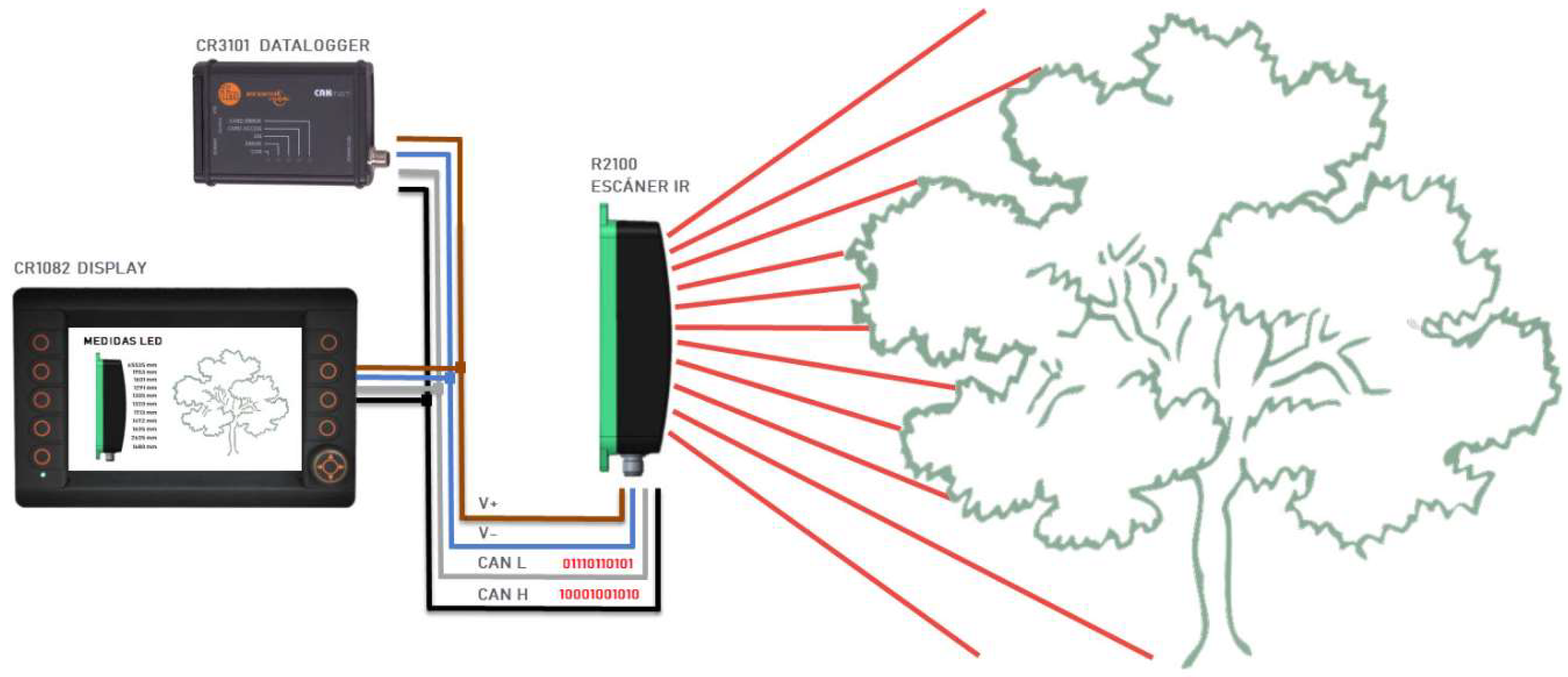
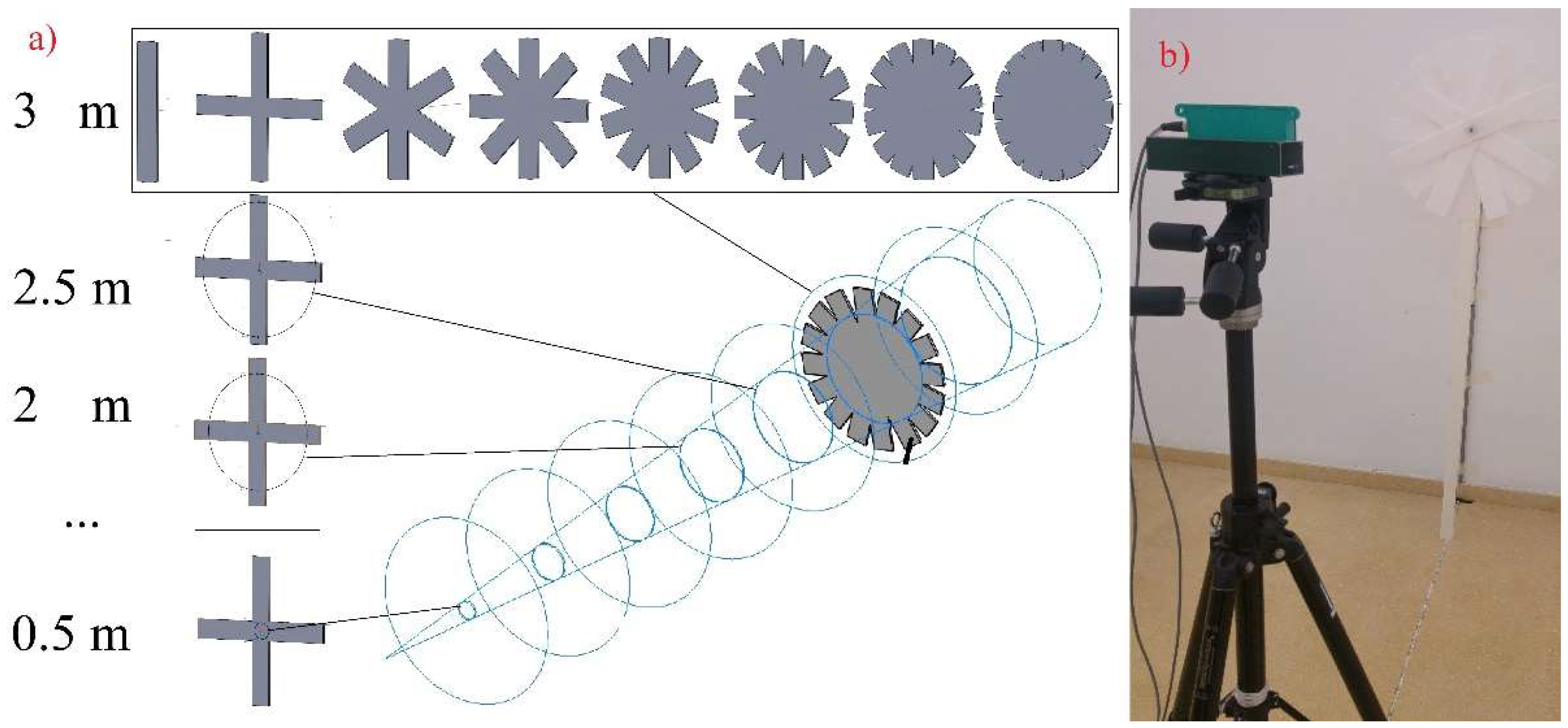
2.1. Measuring System
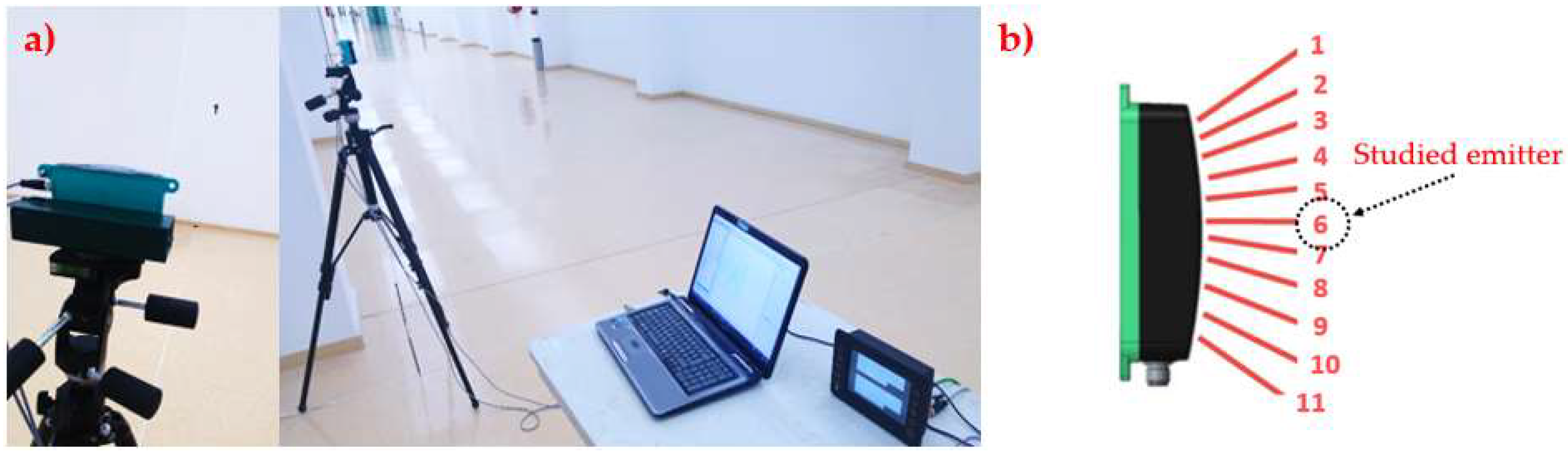
2.2. Laboratory Arrangement
2.2.1. Absolute and Relative Accuracy of the Sensor
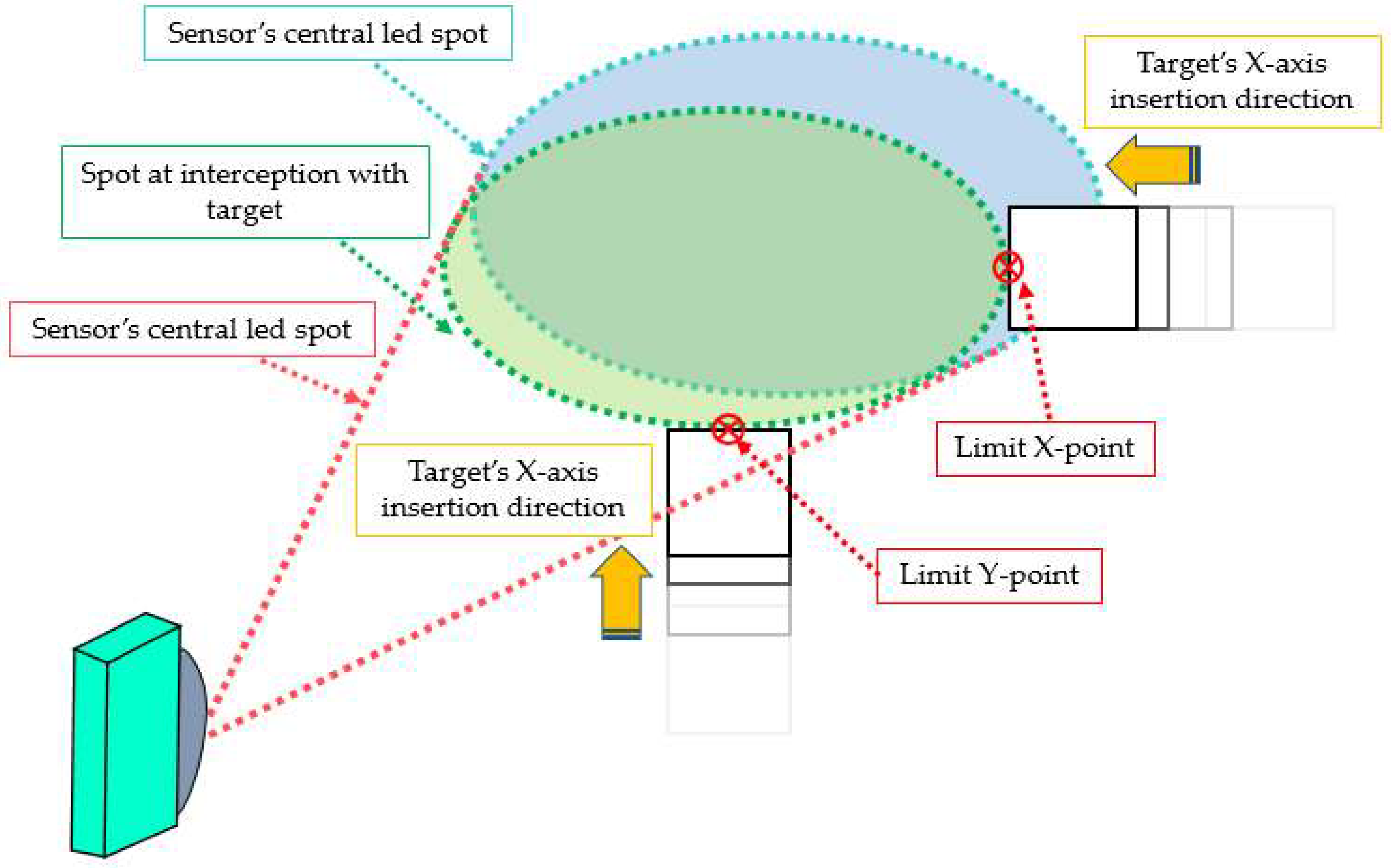
2.2.2. Cone Width Measurement
2.2.3. Density Influence on Sensor’s Accuracy
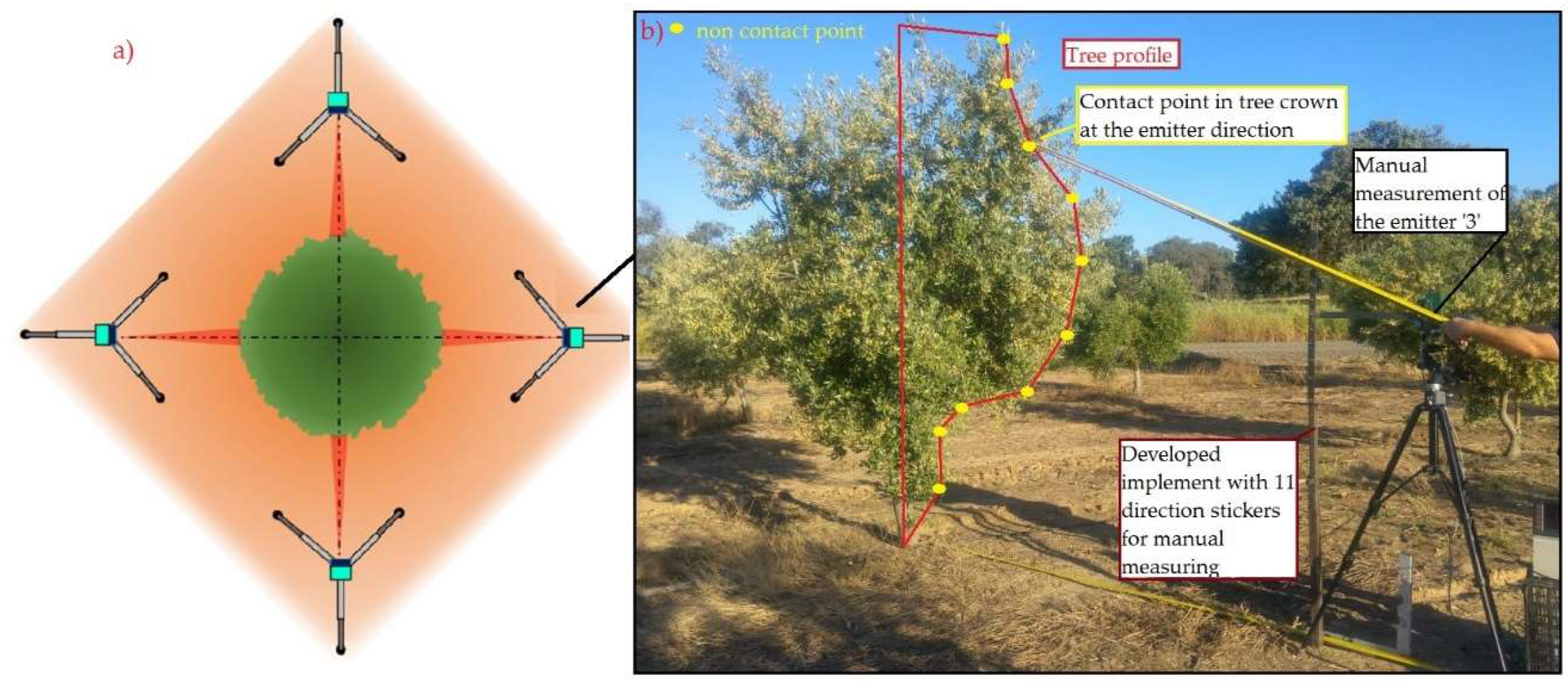
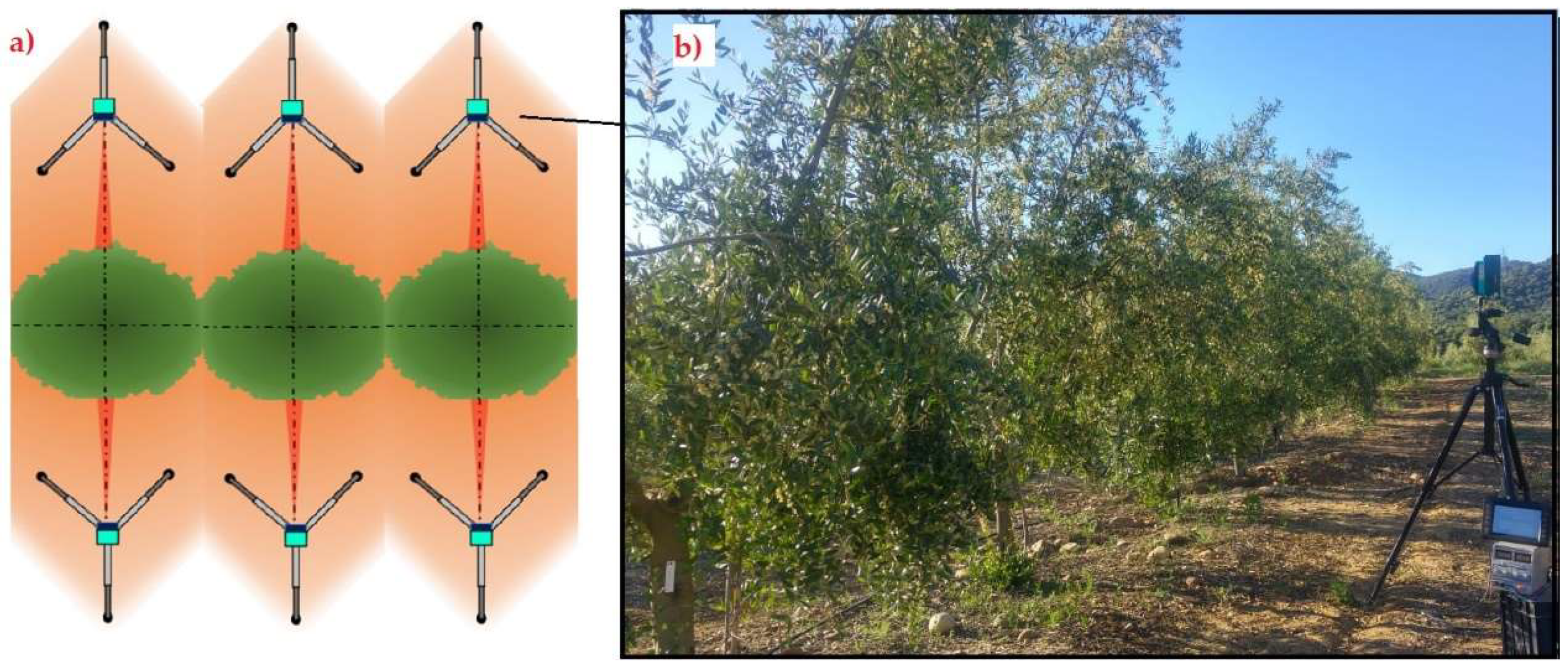
2.3. Field Arrangement
3. Results
3.1. Laboratory Results
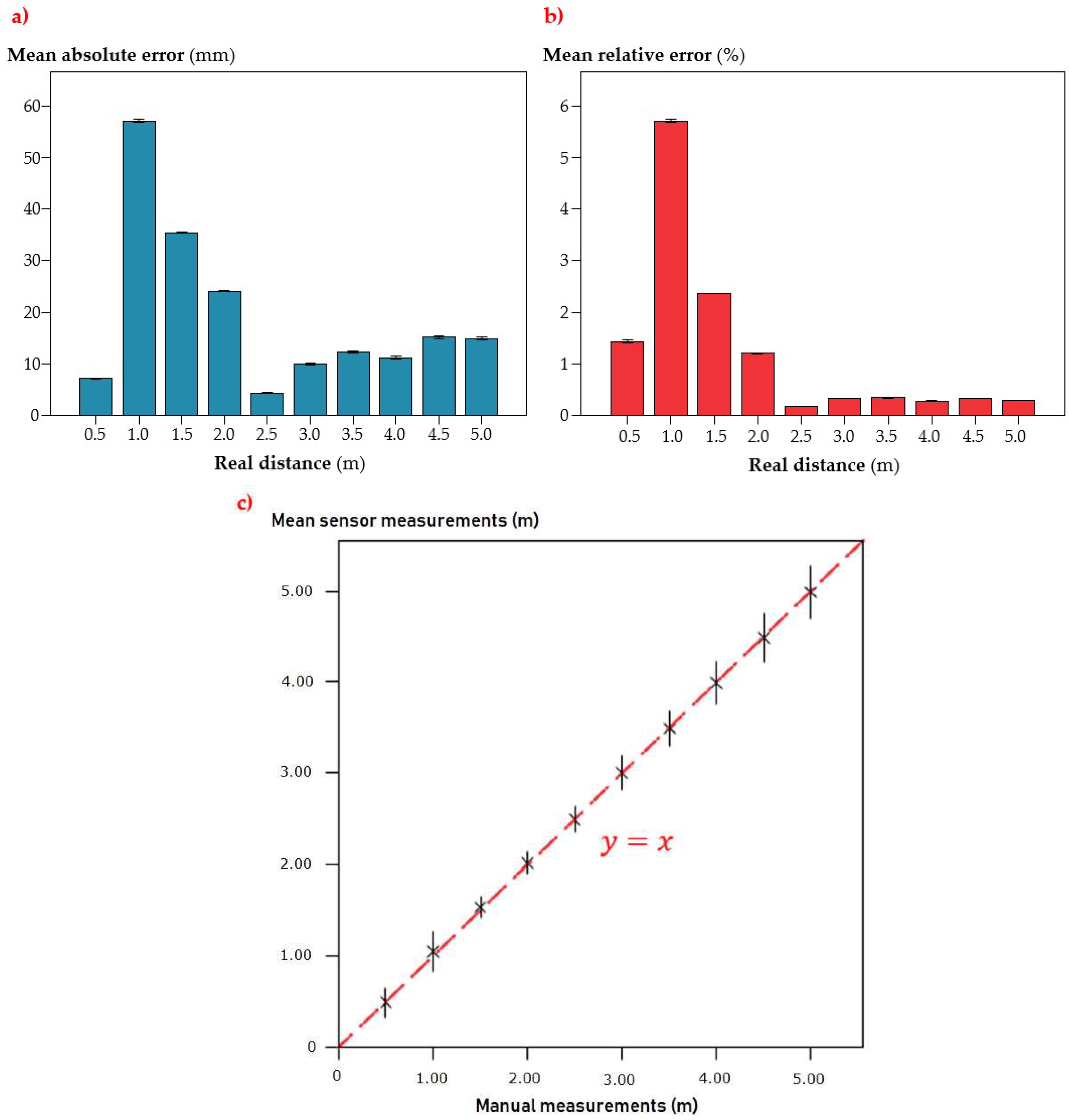
3.1.1. Sensor’s Accuracy Assessment
3.1.2. Sensor’s Cone Width Assessment
3.1.3. Sensor’s Accuracy with Density-Varying Target
3.2. Field Results
4. Conclusions
- The sensor showed a high accuracy in the laboratory tests, with absolute errors under 60 mm and relative ones under 6%. This error increased at 1 m distance from the target, and rapidly decreased for further distances, which means that this sensor should work at, at least, 1.5 m away from the canopy. In general, from this distance up to 5 m, absolute errors decrease below 20 mm and relative errors below 1%. The sensor measurements are highly repetitive, with very low deviation in both laboratory and field conditions. This means that, in the same conditions, the sensor will give the same measurement with very low variation, which makes it reliable when aiming irregular targets, such as real canopies.
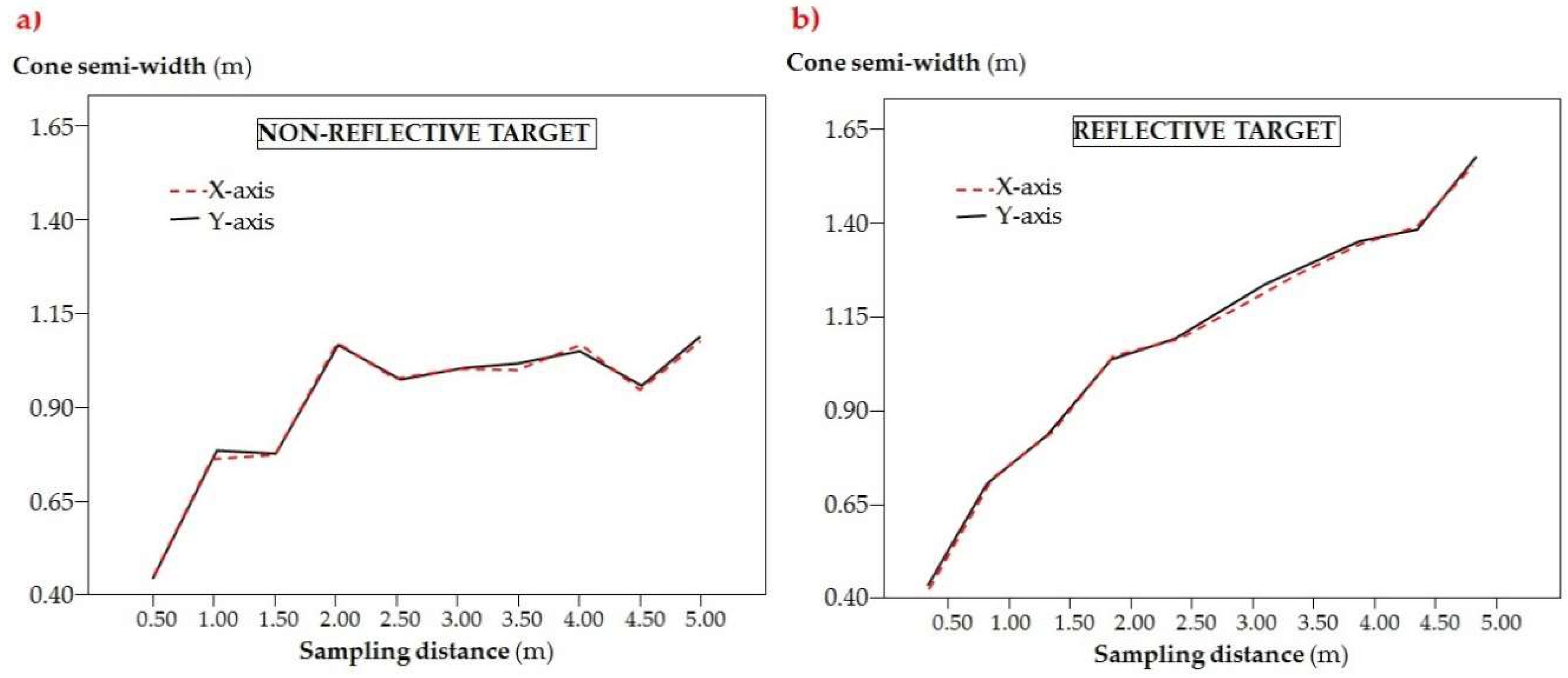
- The sensor’s cone width was considerable, reaching 3.2 m at 5 m distance. This could provide measurement mistakes when aiming at precise points, but loses importance because of the superposition of different emitters, which scan the canopy and, crucially, solve this inconvenience. Another important drawback, the overlap between consecutive emitters, does not take place because of the sensor’s construction. The reflectivity of the target crucially influences the sensor’s cone width, being much higher in the reflective ones, especially for long distances.
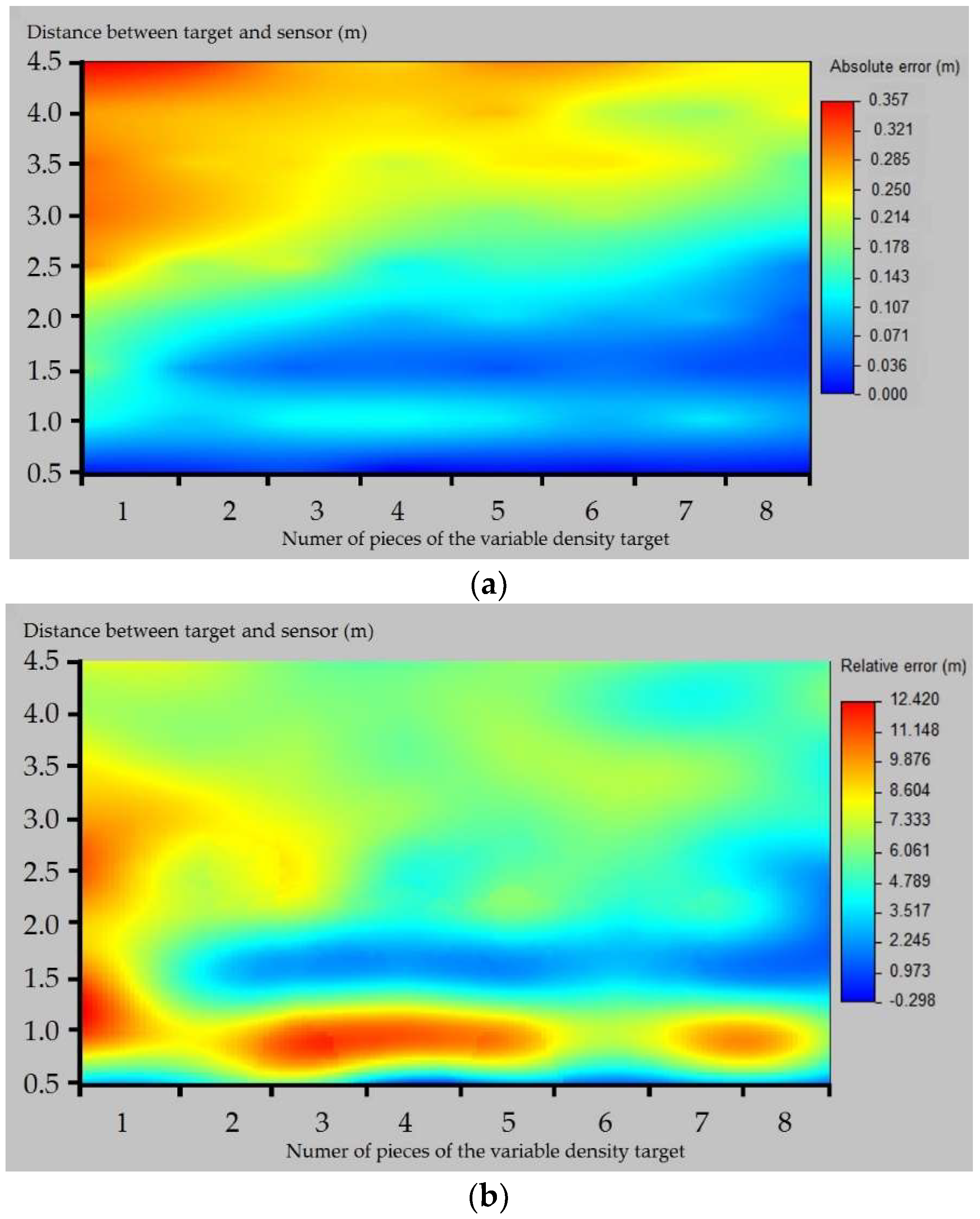
- The target density crucially affects the sensor’s accuracy, as with the measurement distance. Thus, the higher the density, the higher the accuracy. Exactly the opposite behavior was found for the distance, whose increase results in accuracy decrease. The aforementioned parameters did not offer a completely linear reduction of the accuracy, as the sensor presented some particularities in specific points, especially at 1 m sampling distance, where the relative errors rose importantly.
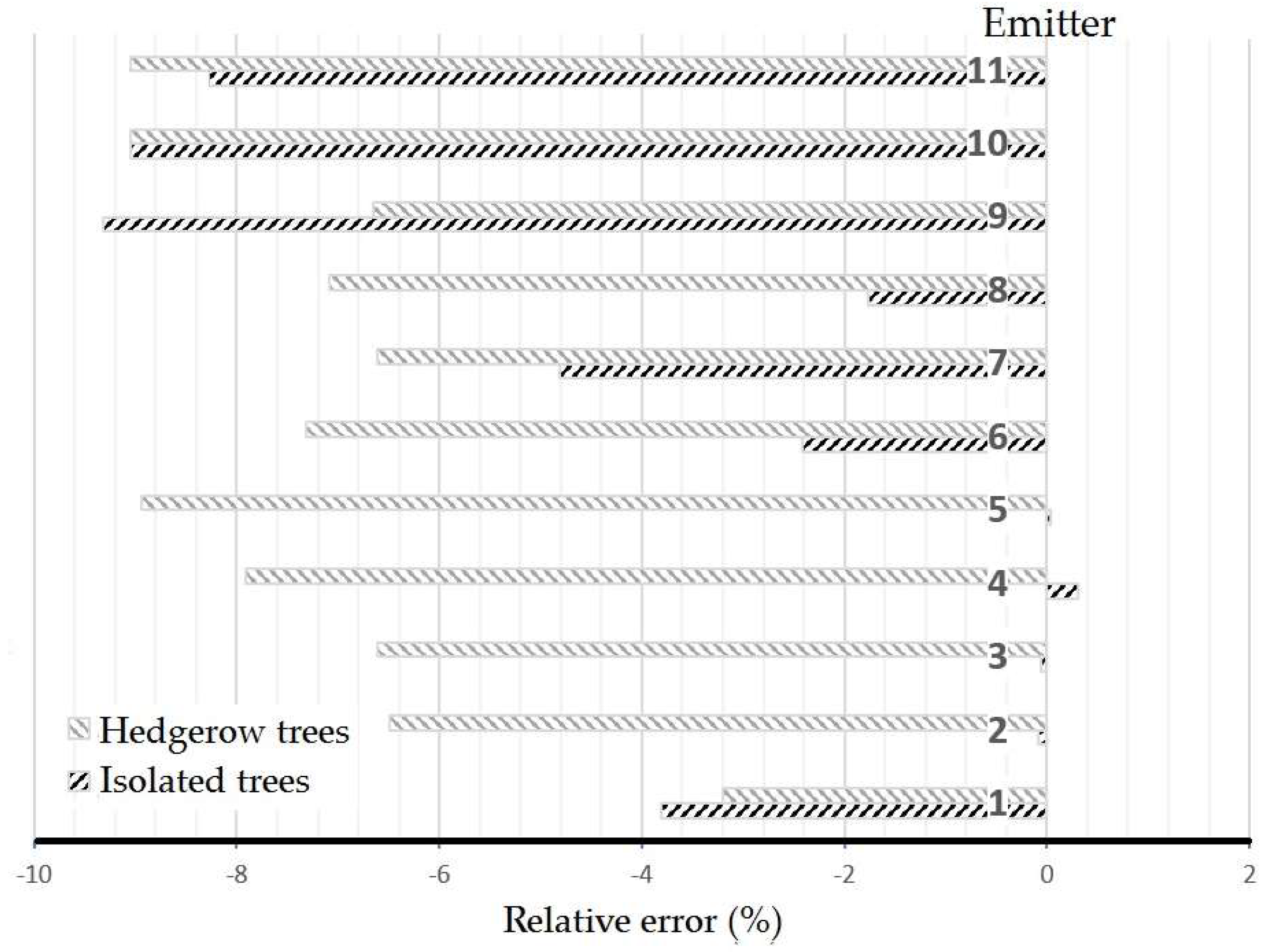
- The field trials showed the sensor’s accuracy when aiming at real olive canopies. The different emitters behaved differently according to the tree type: the isolated trees gave lower errors but higher heterogeneity, and the opposite in the hedgerow trees. In general, errors were below 10% and, in the case of the central and lower emitters in the isolated trees, they were nearly 0. The highest and lowest emitters presented problems for not measuring normally, as the first did not find a valid target and the second found many low-density branches that increased the error. The volume estimation methodologies resulted in different degrees of accuracy in both cases. While the intensive trees gave good results in terms of volume estimation by the studied sensor, the hedgerow tree volumes were underestimated. This could be solved by adjusting models against precise LiDAR sensors in future studies. The geometric estimations resulted in a severe over-estimation of the isolated tree volume and in an accurate estimation of the hedgerow tree volume. This could have an important limitation for irregular canopy profiles.
- The evaluated sensor offered a reasonable degree of accuracy for field operations, for example pesticide dose adjustment, pruning, or canopy contact harvesters. For volume estimation purposes, LiDAR sensors are more appropriate for their lower measurement errors. The multi-beam scanner sensor seems a valid alternative to manual methodologies or the ultrasonic sensors present in commercial sprayers, and allows for a proper profile definition for real-time use, not only in olives trees but also in other crops because of its operation principles.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Balsari, P.; Doruchowski, G.; Marucco, P.; Tamagnone, M.; Van De Zande, J.; Wenneker, M. A System for Adjusting the Spray Application to the Target Characteristics. Agric. Eng. Int. CIGR J. 2008, X, 1–11. [Google Scholar]
- Cross, J.V.; Walklate, P.J.; Murray, R.A.; Richardson, G.M. Spray deposits and losses in different sized apple trees from an axial fan orchard sprayer: 1. Effects of spray liquid flow rate. Crop Prot. 2001, 20, 13–30. [Google Scholar] [CrossRef]
- Duga, A.T.; Ruysen, K.; Dekeyser, D.; Nuyttens, D.; Bylemans, D.; Nicolai, B.M.; Verboven, P. Spray deposition profiles in pome fruit trees: Effects of sprayer design, training system and tree canopy characteristics. Crop Prot. 2015, 67, 200–213. [Google Scholar] [CrossRef] [Green Version]
- García-Ramos, F.J.; Vidal, M.; Boné, A.; Malón, H.; Aguirre, J. Analysis of the air flow generated by an air-assisted sprayer equipped with two axial fans using a 3D sonic anemometer. Sensors 2012, 12, 7598–7613. [Google Scholar] [CrossRef]
- Gil, E.; Arnó, J.; Llorens, J.; Sanz, R.; Llop, J.; Rosell-Polo, J.; Gallart, M.; Escolà, A. Advanced Technologies for the Improvement of Spray Application Techniques in Spanish Viticulture: An Overview. Sensors 2014, 14, 691–708. [Google Scholar] [CrossRef] [Green Version]
- Llorens, J.; Gallart, M.; Llop, J.; Miranda-Fuentes, A.; Gil, E. Difficulties to apply ISO 22866 requirements for drift measurements. A particular case of traditional olive tree plantations. Asp. Appl. Biol. 2016, 132, 31–38. [Google Scholar]
- Miranda-Fuentes, A.; Rodríguez-Lizana, A.; Gil, E.; Agüera-Vega, J.; Gil-Ribes, J.A. Influence of liquid-volume and airflow rates on spray application quality and homogeneity in super-intensive olive tree canopies. Sci. Total Environ. 2015, 537, 250–259. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef] [Green Version]
- Llop, J.; Gil, E.; Llorens, J.; Miranda-Fuentes, A.; Gallart, M. Testing the suitability of a terrestrial 2D LiDAR scanner for canopy characterization of greenhouse tomato crops. Sensors 2016, 16, 1435. [Google Scholar] [CrossRef]
- Walklate, P.J.; Weiner, K.-L.; Parkin, C.S. Analysis of and Experimental Measurements made on a Moving Air-Assisted Sprayer with Two-Dimensional Air-Jets Penetrating a Uniform Crop Canopy. J. Agric. Eng. Res. 1996, 63, 365–377. [Google Scholar] [CrossRef]
- Sola-Guirado, R.R.; Castro-García, S.; Blanco-Roldán, G.L.; Jiménez-Jiménez, F.; Castillo-Ruiz, F.J.; Gil-Ribes, J.A. Traditional olive tree response to oil olive harvesting technologies. Biosyst. Eng. 2014, 118, 186–193. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Llorens, J.; Gamarra-Diezma, J.L.; Gil-Ribes, J.A.; Gil, E. Towards an optimized method of olive tree crown volume measurement. Sensors 2015, 15, 3671–3687. [Google Scholar] [CrossRef]
- Landers, A.J. Developments towards an automatic precision sprayer for fruit crop canopies. In 2010 Pittsburgh, Pennsylvania, June 20–June 23, 2010; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2010. [Google Scholar]
- Jeon, H.Y.; Zhu, H. Development of a Variable-Rate Sprayer for Nursery Liner Applications. Trans. ASABE 2012, 55, 303–312. [Google Scholar] [CrossRef]
- Rosell-Polo, J.R.; Sanz, R.; Llorens, J.; Arnó, J.; Escolà, A.; Ribes-Dasi, M.; Masip, J.; Camp, F.; Gràcia, F.; Solanelles, F.; et al. A tractor-mounted scanning LIDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements. Biosyst. Eng. 2009, 102, 128–134. [Google Scholar] [CrossRef] [Green Version]
- Giles, D.K.; Delwiche, M.J.; Dodd, R.B. Sprayer control by sensing orchard crop characteristics: Orchard architecture and spray liquid savings. J. Agric. Eng. Res. 1989, 43, 271–289. [Google Scholar] [CrossRef]
- Pérez-Ruiz, M.; Agüera, J.; Gil, J.A.; Slaughter, D.C. Optimization of agrochemical application in olive groves based on positioning sensor. Precis. Agric. 2010, 12, 564–575. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Ozkan, H.E.; Zhu, H.; Derksen, R.C.; Krause, C.R. Spray Deposition inside Tree Canopies from a Newly Developed Variable-Rate Air-Assisted Sprayer. Trans. ASABE 2013, 56, 1263–1272. [Google Scholar] [CrossRef]
- Escolà, A.; Rosell-Polo, J.R.; Planas, S.; Gil, E.; Pomar, J.; Camp, F.; Llorens, J.; Solanelles, F. Variable rate sprayer. Part 1—Orchard prototype: Design, implementation and validation. Comput. Electron. Agric. 2013, 95, 122–135. [Google Scholar] [CrossRef]
- Gil, E.; Llorens, J.; Llop, J.; Fàbregas, X.; Escolà, A.; Rosell-Polo, J.R. Variable rate sprayer. Part 2—Vineyard prototype: Design, implementation, and validation. Comput. Electron. Agric. 2013, 95, 136–150. [Google Scholar] [CrossRef]
- Sola-Guirado, R.R.; Ceular-Ortiz, D.; Gil-Ribes, J.A. Automated system for real time tree canopy contact with canopy shakers. Comput. Electron. Agric. 2017, 143, 139–148. [Google Scholar] [CrossRef]
- Gamarra-Diezma, J.L.; Miranda-Fuentes, A.; Llorens, J.; Cuenca, A.; Blanco-Roldán, G.L.; Rodríguez-Lizana, A. Testing Accuracy of Long-Range Ultrasonic Sensors for Olive Tree Canopy Measurements. Sensors 2015, 15, 2902–2919. [Google Scholar] [CrossRef] [Green Version]
- Méndez, V.; Catalán, H.; Rosell-Polo, J.R.; Arnó, J.; Sanz, R. LiDAR simulation in modelled orchards to optimise the use of terrestrial laser scanners and derived vegetative measures. Biosyst. Eng. 2013, 115, 7–19. [Google Scholar] [CrossRef] [Green Version]
- Villalobos, F.J.; Orgaz, F.; Mateos, L. Non-destructive measurement of leaf area in olive (Olea europaea L.) trees using a gap inversion method. Agric. For. Meteorol. 1995, 73, 29–42. [Google Scholar] [CrossRef]
- Zaman, Q.; Schumann, A.W. Performance of an ultrasonic tree volume measurement system in commercial citrus groves. Precis. Agric. 2005, 6, 467–480. [Google Scholar] [CrossRef]
- Cross, J.V.; Murray, R.A. Relationship between orchard tree crop structure and performance characteristics of an axial fan sprayer. Asp. Appl. Biol. 2000, 57, 285–292. [Google Scholar]
- Iniesta, F.; Testi, L.; Orgaz, F.; Villalobos, F.J. The effects of regulated and continuous deficit irrigation on the water use, growth and yield of olive trees. Eur. J. Agron. 2009, 30, 258–265. [Google Scholar] [CrossRef]
- Sola-Guirado, R.R.; Castillo-Ruiz, F.J.; Jiménez-Jiménez, F.; Blanco-Roldan, G.L.; Castro-Garcia, S.; Gil-Ribes, J.A. Olive actual “on year” yield forecast tool based on the tree canopy geometry using UAS imagery. Sensors 2017, 17, 1743. [Google Scholar] [CrossRef]
- Yadav, S.; Rizvi, I.; Kadam, S. Urban tree canopy detection using object-based image analysis for very high resolution satellite images: A literature review. In Proceedings of the 2015 International Conference on Technologies for Sustainable Development (ICTSD), Mumbai, India, 4–6 February 2015; pp. 4–9. [Google Scholar] [CrossRef]
- Underwood, J.P.; Hung, C.; Whelan, B.; Sukkarieh, S. Mapping almond orchard canopy volume, flowers, fruit and yield using lidar and vision sensors. Comput. Electron. Agric. 2016, 130, 83–96. [Google Scholar] [CrossRef]
- Kise, M.; Zhang, Q.; Rovira-Más, F. A Stereovision-based crop row detection method for tractor-automated guidance. Biosyst. Eng. 2005, 90, 357–367. [Google Scholar] [CrossRef]
- Rovira-Más, F.; Zhang, Q.; Reid, J.F. Creation of Three-dimensional Crop Maps based on Aerial Stereoimages. Biosyst. Eng. 2005, 90, 251–259. [Google Scholar] [CrossRef]
- Llorens, J.; Gil, E.; Llop, J.; Queraltó, M. Georeferenced LiDAR 3D Vine Plantation Map Generation. Sensors 2011, 11, 6237–6256. [Google Scholar] [CrossRef] [Green Version]
- Tumbo, S.D.; Salyani, M.; Whitney, J.D.; Wheaton, T.A.; Miller, W.M. Investigation of laser and ultrasonic ranging sensors for measurements of citrus canopy volume. Appl. Eng. Agric. 2002, 18, 367–372. [Google Scholar] [CrossRef]
- Gil, E.; Escolà, A.; Rosell, J.R.; Planas, S.; Val, L. Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Prot. 2007, 26, 1287–1297. [Google Scholar] [CrossRef] [Green Version]
- Wei, J.; Salyani, M. Development of a laser scanner for measuring tree canopy characteristics: Phase 2. Foliage density measurement. Trans. ASABE 2005, 48, 1595–1602. [Google Scholar] [CrossRef]
- Pai, N.; Salyani, M.; Sweeb, R.D. Regulating airflow of orchard airblast sprayer based on tree foliage density. Trans. ASABE 2009, 52, 1423–1428. [Google Scholar] [CrossRef]
- Palleja, T.; Landers, A.J. Real time canopy density estimation using ultrasonic envelope signals in the orchard and vineyard. Comput. Electron. Agric. 2015, 115, 108–117. [Google Scholar] [CrossRef]
- Escolà, A.; Planas, S.; Rosell, J.; Pomar, J.; Camp, F.; Solanelles, F.; Gracia, F.; Llorens, J.; Gil, E. Performance of an Ultrasonic Ranging Sensor in Apple Tree Canopies. Sensors 2011, 11, 2459–2477. [Google Scholar] [CrossRef] [Green Version]
- Zaman, Q.U.; Schumann, A.W.; Hostler, H.K. Estimation of citrus fruit yield using ultrasonically-sensed tree size. Appl. Eng. Agric. 2006, 22, 39–44. [Google Scholar] [CrossRef]
- Stajnko, D.; Berk, P.; Lešnik, M.; Jejčič, V.; Lakota, M.; Strancar, A.; Hočevar, M.; Rakun, J. Programmable ultrasonic sensing system for targeted spraying in orchards. Sensors 2012, 12, 15500–15519. [Google Scholar] [CrossRef]
- Giuliani, R.; Magnanini, E.; Fragassa, C.; Nerozzi, F. Ground monitoring the light-shadow windows of a tree canopy to yield canopy light interception and morphological traits. Plant Cell Environ. 2000, 23, 783–796. [Google Scholar] [CrossRef] [Green Version]
- Bietresato, M.; Carabin, G.; Vidoni, R.; Gasparetto, A.; Mazzetto, F. Evaluation of a LiDAR-based 3D-stereoscopic vision system for crop-monitoring applications. Comput. Electron. Agric. 2016, 124, 1–13. [Google Scholar] [CrossRef]
- Sanz, R.; Rosell, J.R.; Llorens, J.; Gil, E.; Planas, S. Relationship between tree row LIDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LIDAR 3D Dynamic Measurement System. Agric. For. Meteorol. 2013, 171, 153–162. [Google Scholar] [CrossRef] [Green Version]
- Sanz-Cortiella, R.; Llorens-Calveras, J.; Escolà, A.; Arno-Satorra, J.; Ribes-Dasi, M.; Masip-Vilalta, J.; Camp, F.; Gracia-Aguila, F.; Solanelles-Batlle, F.; Planas-DeMarti, S.; et al. Innovative LIDAR 3D Dynamic Measurement System to Estimate Fruit-Tree Leaf Area. Sensors 2011, 11, 5769–5791. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moorthy, I.; Miller, J.R.; Berni, J.A.J.; Zarco-Tejada, P.; Hu, B.; Chen, J. Field characterization of olive (Olea europaea L.) tree crown architecture using terrestrial laser scanning data. Agric. For. Meteorol. 2011, 151, 204–214. [Google Scholar] [CrossRef] [Green Version]
- Rosell, J.R.; Llorens, J.; Sanz, R.; Arnó, J.; Ribes-Dasi, M.; Masip, J.; Escolà, A.; Camp, F.; Solanelles, F.; Gràcia, F. Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning. Agric. For. Meteorol. 2009, 149, 1505–1515. [Google Scholar] [CrossRef] [Green Version]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Ultrasonic and LIDAR Sensors for Electronic Canopy Characterization in Vineyards: Advances to Improve Pesticide Application Methods. Sensors 2011, 11, 2177–2194. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Campillo, R. Los productos químicos en la olivicultura actual. Phytoma España 1998, 102, 159–167. [Google Scholar]
- Parliament, E. European Directive 2009/128/EC for the Sustainable Use of Pesticides; European Parliamentary Research Service: Brussels, Belgium, 2009; pp. 71–86. [Google Scholar]
- Giles, D.K.; Delwiche, M.J.; Dodd, R.B. Control of orchard spraying based on electronic sensing of target characteristics. Trans. ASAE 1987, 30, 1624–1636. [Google Scholar] [CrossRef]
- Ganzelmeier, H.; Rautmann, D. Drift, drift reducing sprayers and sprayer testing. Asp. Appl. Biol. 2000, 57, 1–10. [Google Scholar]
- Brown, D.L.; Giles, D.K.; Oliver, M.N.; Klassen, P. Targeted spray technology to reduce pesticide in runoff from dormant orchards. Crop Prot. 2008, 27, 545–552. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Cuenca, A.; Godoy-Nieto, A.; González-Sánchez, E.J.; de Fuentes, P.M.; Blanco-Roldán, G.L.; Gil-Ribes, J.A. Field testing and monitoring of newly designed airblast sprayers in traditional olive orchards. In Proceedings of the 14th Workshop on Spray Application Techniques in Fruit Growing, Hasselt, Belgium, 10–12 May 2017. [Google Scholar]
- Torrent, X.; Garcerá, C.; Moltó, E.; Chueca, P.; Abad, R.; Grafulla, C.; Román, C.; Planas, S. Comparison between standard and drift reducing nozzles for pesticide application in citrus: Part II. Effects on canopy spray distribution, control efficacy of Aonidiella aurantii (Maskell), beneficial parasitoids and pesticide residues on fruit. Crop Prot. 2017, 94, 83–96. [Google Scholar] [CrossRef]
- Doruchowski, G.; Balsari, P.; Van De Zande, J. Development of a crop adapted spray application system for sustainable plant protection in fruit growing. In Proceedings of the International Symposium on Application of Precision Agriculture for Fruits and Vegetables, Orlando, FL, USA, 6 January 2008; Volume 824, pp. 251–260. [Google Scholar]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Variable rate dosing in precision viticulture: Use of electronic devices to improve application efficiency. Crop Prot. 2010, 29, 239–248. [Google Scholar] [CrossRef] [Green Version]
- Miranda-Fuentes, A.; Rodríguez-Lizana, A.; Cuenca, A.; González-Sánchez, E.J.; Blanco-Roldán, G.L.; Gil-Ribes, J.A. Improving plant protection product applications in traditional and intensive olive orchards through the development of new prototype air-assisted sprayers. Crop Prot. 2017, 94, 44–58. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Emitter | Standard Deviation (mm) |
|---|---|
| 1 | 11.41 |
| 2 | 12.13 |
| 3 | 12.17 |
| 4 | 10.62 |
| 5 | 9.32 |
| 6 | 8.87 |
| 7 | 11.62 |
| 8 | 14.37 |
| 9 | 17.82 |
| 10 | 24.36 |
| 11 | 18.93 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sola-Guirado, R.R.; Bayano-Tejero, S.; Rodríguez-Lizana, A.; Gil-Ribes, J.A.; Miranda-Fuentes, A. Assessment of the Accuracy of a Multi-Beam LED Scanner Sensor for Measuring Olive Canopies. Sensors 2018, 18, 4406. https://doi.org/10.3390/s18124406
Sola-Guirado RR, Bayano-Tejero S, Rodríguez-Lizana A, Gil-Ribes JA, Miranda-Fuentes A. Assessment of the Accuracy of a Multi-Beam LED Scanner Sensor for Measuring Olive Canopies. Sensors. 2018; 18(12):4406. https://doi.org/10.3390/s18124406
Chicago/Turabian StyleSola-Guirado, Rafael R., Sergio Bayano-Tejero, Antonio Rodríguez-Lizana, Jesús A. Gil-Ribes, and Antonio Miranda-Fuentes. 2018. "Assessment of the Accuracy of a Multi-Beam LED Scanner Sensor for Measuring Olive Canopies" Sensors 18, no. 12: 4406. https://doi.org/10.3390/s18124406
APA StyleSola-Guirado, R. R., Bayano-Tejero, S., Rodríguez-Lizana, A., Gil-Ribes, J. A., & Miranda-Fuentes, A. (2018). Assessment of the Accuracy of a Multi-Beam LED Scanner Sensor for Measuring Olive Canopies. Sensors, 18(12), 4406. https://doi.org/10.3390/s18124406