1. Introduction
With the increasing attention being paid to healthcare, wireless sensor networks for physiological monitoring have been widely applied in daily life. The rapid development of biosensors provides a means for real-time monitoring for healthcare and can help realize ubiquitous healthcare. Patients could be monitored by doctors from a personal monitoring device in any environment and without restricting activity. Nanoscale sensors can detect physiological parameters inside the body and then transmit signals to a sensor attached on the skin. Thereafter, the data can be wirelessly transmitted by radio frequency (RF) communication networks. Various body sensors, such as accelerometers and monitors for ECG, temperature, glucose, and SpO
2, have been developed for pervasive healthcare monitoring systems [
1]. These sensors are placed inside the body or attached to the skin to monitor the health status of a patient. For example, diabetics use an implanted glucose sensor and a wearable insulin actuator to adjust their glucose level. When the glucose level increases, the glucose sensor transmits a signal to the actuator, which has a microneedle attached to the skin that triggers the injection of insulin. The system monitors the patient in real-time, and does not require patient hospitalization. Physiological data can be wirelessly transmitted through RF to doctors for analysis [
2]. This can reduce the patient healthcare costs and the frequency of hospital visits. With recent developments in nanotechnology, materials science, and integrated circuits, researchers are focusing more attention on the demands of wearable healthcare systems. However, there are still few standards or effective communication methods for body-area networks, especially for implanted sensors. Therefore, communication among sensor nodes is an important role for current and future device development.
RF waves have been successfully used in wireless communication systems. Conventionally, in body sensor networks (BSNs), an RF microchip is embedded in the sensor board for communication [
3,
4]. To reduce the size of the sensor module, it is necessary to reduce the size of the RF antenna chips [
5,
6,
7]. The RF modules in portable devices also consume battery power quickly [
8,
9]. This is a concern for implantable sensors, because it is difficult to change the batteries frequently. Depending on the specific environment, RF electromagnetic waves have poor propagation in water. This is a particular problem for in-body communication, because 60% to 70% of the human body is made of water. The RF signals transmitted through tissues suffer high attenuation. To enhance the signal, high-power RF devices are used, which can result in heating of soft tissue because of absorption. Furthermore, RF signals are easily affected when other electronic devices operate at the same frequency. The RF bandwidth is limited, which inherently limits the communication rates [
10]. Physical monitoring data are considered confidential personal medical information, which requires the wireless system to be secure to prevent eavesdropping or interference. A lack of security could be a risk for the patient, especially in the case of a monitoring board with a therapy actuator. Prolonged RF radiation can overheat tissue, which can lead to bioeffects [
11,
12]. Health concerns therefore impose restrictions on RF signal levels.
To address all of these issues, we propose using ultrasonic waves as the communication medium for healthcare systems. Ultrasound has been pervasively applied in medicine [
13]. Therefore, it can be an alternative method for short-distance digital communication. Ultrasound has advantages over electromagnetic waves in the application of implantable medical devices: The human body is composed mostly of water, and RF waves are subject to high absorption. For communication purposes, an RF module requires high transmission power. That requirement increases the size and weight of an implantable sensor. Researchers have thus focused on microsize and low power consumption for implantable sensors. Furthermore, the RF spectrum hosts many devices, such as Wi-Fi and Bluetooth devices. The interference generated can affect the reliability of intrabody networks and the security of patients. Information about patients could be eavesdropped upon, which causes a security concern. Ultrasound could propagate along the body or inside the body, which enhances security. In addition, the frequency choice is more flexible compared with that of RF communication. From research conducted over the past decades, ultrasonic waves are known to have better propagation characteristics than RF waves in medical applications. Previous studies have provided software-based ultrasonic sensor networks; however, there was no real experimental realization [
14,
15,
16] on digital communication. Therefore, we attempted to use ultrasonic wave communication between sensors on the basis of an experimental setup used for body sensor networks.
The rest of this paper is organized as follows. In
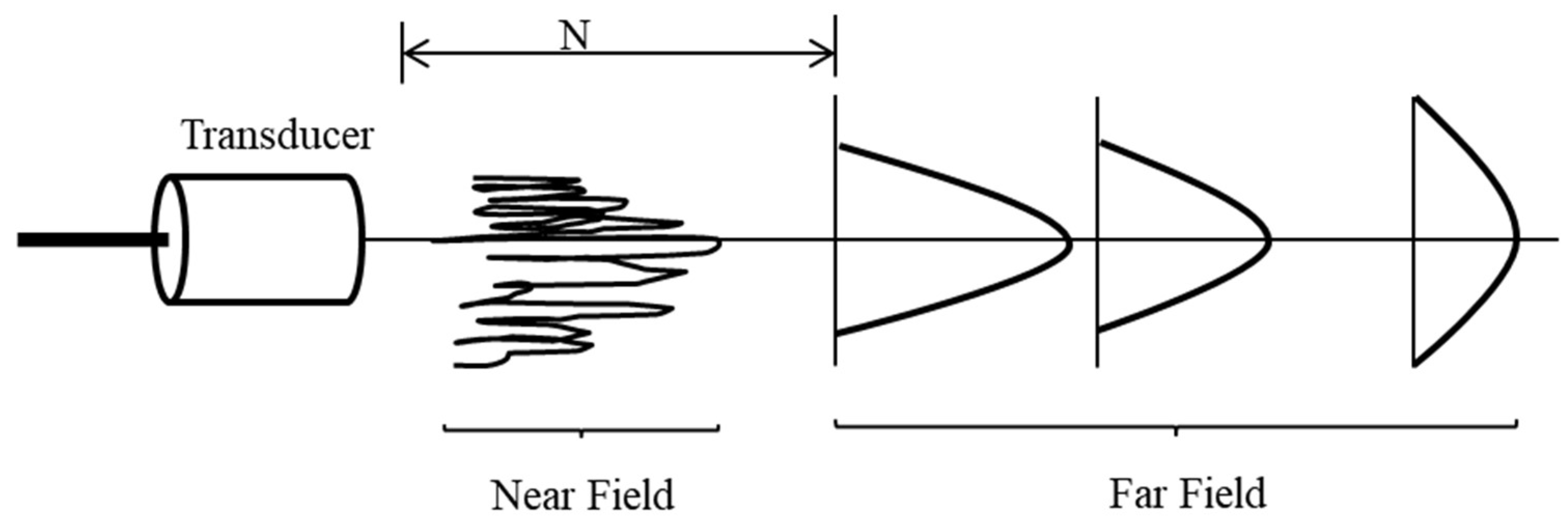
Section 2, we introduce the principles of ultrasonic waves, including the attenuation of ultrasonic waves and the fundamentals of propagation along the body. In
Section 3, we illustrate the modulation method of communication and the design of the experimental setup, and discuss the experimental and simulation waveforms. In
Section 4, we present the results and discuss the performance of ultrasonic waves through a BSN. The conclusion is provided in
Section 5.
3. Method
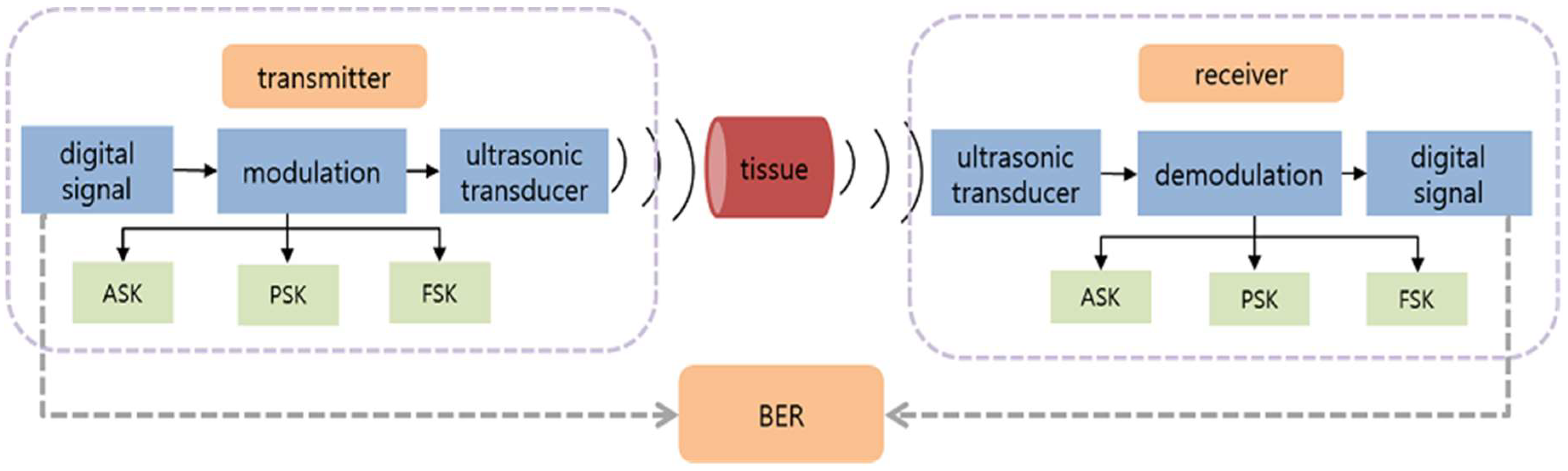
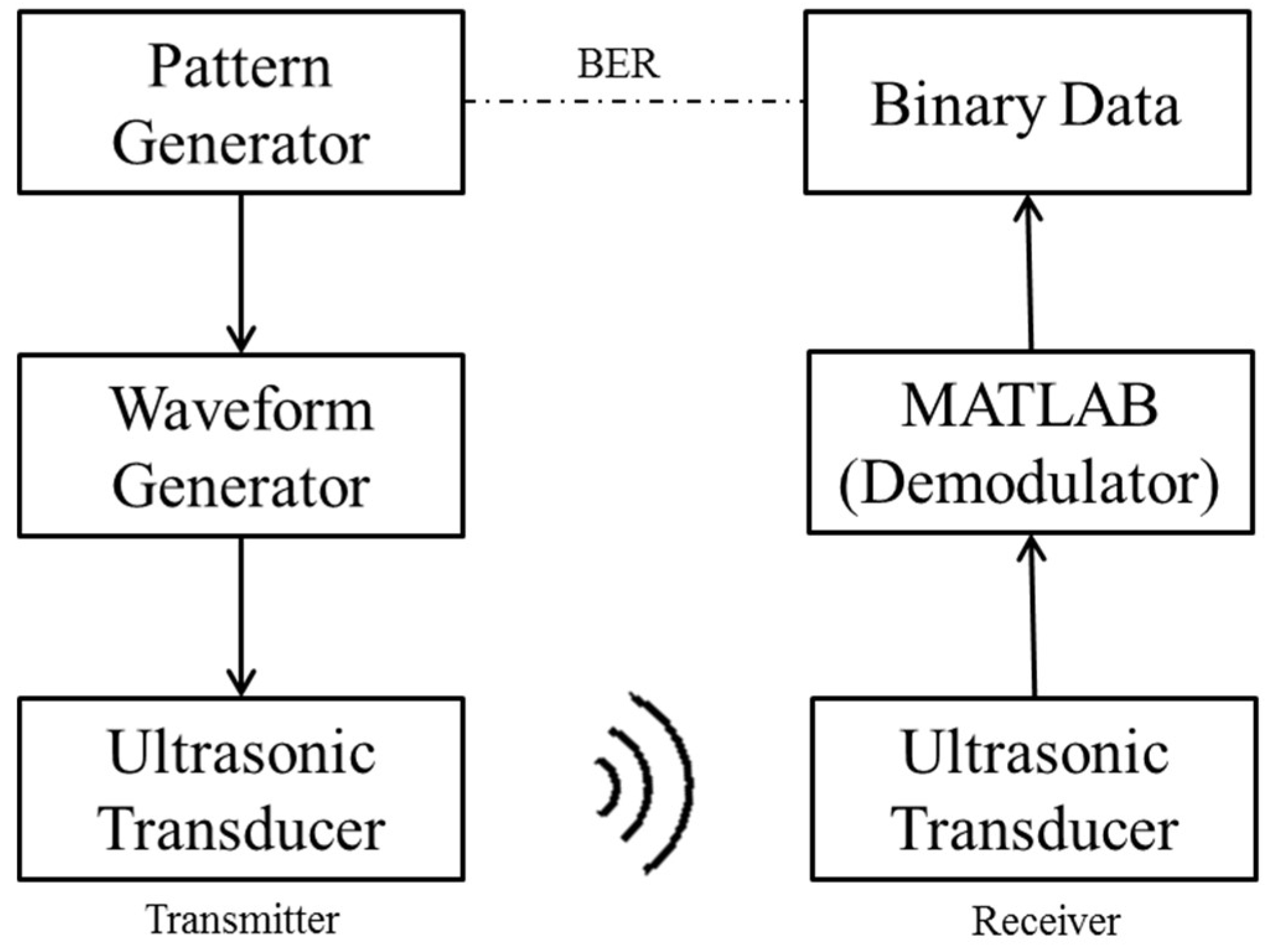
The ultrasonic communication system was designed in two parts. The transmission part includes the signal generator which generates digital signal, modulation, and ultrasonic transducer. Three principal digital communication modulation schemes were used in the experiments: amplitude shift keying (ASK), frequency shift keying (FSK), and phase shift keying (PSK). In this study, only binary modulation was considered. Binary ASK is in the term of on-off keying (OOK). The receiver part included the ultrasonic transducer as the receiver. The digital signal was modulated and then sent to the ultrasonic transducer. The received ultrasound signal was demodulated to the original digital signal. Finally, the bit error rate (BER) was calculated for evaluation of the three modulation methods.
Figure 2 shows the architecture of the ultrasonic communication for BSNs.
ASK is a form of amplitude modulation that represents digital signals as amplitude variations of the carrier wave. Binary ASK signaling is the simplest form of ASK with two symbol states. A zero-amplitude carrier transmission represents a 0, and a non-zero amplitude indicates a 1. Binary ASK signaling is also OOK. The general analytical expression for the modulated signal
Si(
t) is
where
E is the symbol energy,
T is the symbol time duration, the amplitude term
has
M discrete values, and
φ is the phase. In the case of OOK,
M is equal to 2, corresponding to two waveform types.
FSK is a frequency modulation scheme that conveys data using distinct frequencies to represent symbol states. The simplest FSK is binary FSK (BFSK). BFSK uses a pair of discrete frequencies to transmit binary 0 and 1 information. The general analytical expression for a modulated BFSK signal is
PSK conveys data by changing the phase of the carrier. Binary PSK (BPSK) here has only two phases, 0 and π. The mathematical expression is
3.1. Experimental Setup
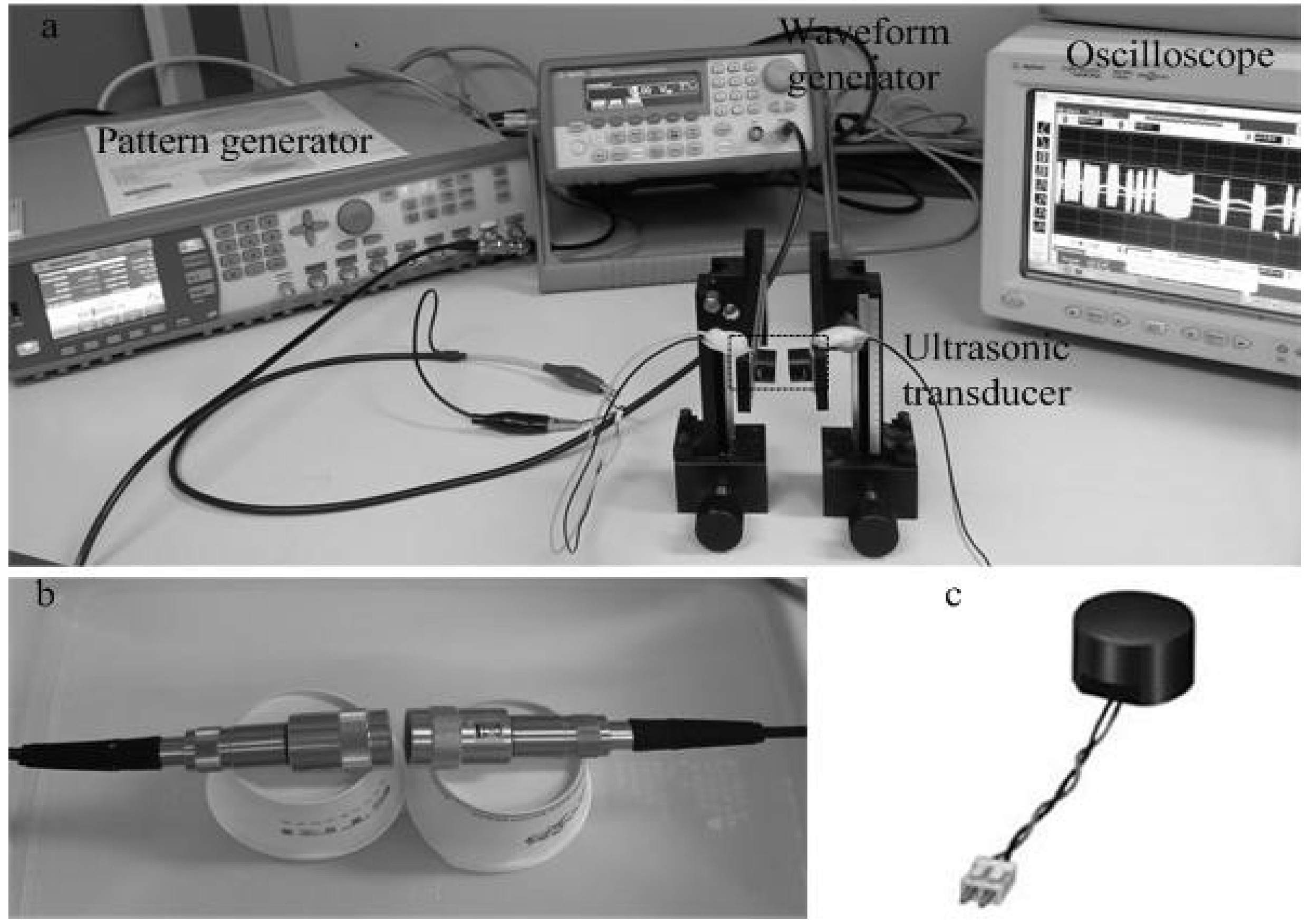
To set up the experiment, we considered several points. First, we could not use a human subject for the experiment because of ethical considerations. Hence, beef was considered as a substitute for soft tissue. Second, ultrasonic transducers emit ultrasonic waves in a propagation medium such asin air or water environment. Third, the narrow frequency bandwidth of the ultrasonic transducer is a limitation, especially for FSK modulation. Fourth, the different healthcare communication scenarios, such as in-body to in-body, in-body to on-body, and on-body to off-body, had to be considered. For BSNs, communication could be inside the body. With one sensor on the skin and the other under the skin, the inside sensor could monitor physical parameters, such as blood inside the body, then transmit the information to the receiver on the skin. Next, the sensor on the skin transmits the signal to the hospital via an RF communication method. The distance between the two sensors measures from a few mm up to 1 cm, considered applicable for short-range communications. Therefore, we do not consider long distances for inside body communication. The application is applicable for implantable sensors because it is designed for short-range communications. The experimental setup was operated in air and water environments based on the property of two types of ultrasonic transducers, as shown in
Figure 3. The commercial ultrasonic transducer has limited frequencies. We first chose the Murata (40 kHz) transducer for OOK and BPSK modulation. However, it could not receive signals for BFSK modulation because of its narrow bandwidth. Next, we chose the Olympus 500 kHz for BFSK modulation, which is a relatively low frequency commercial ultrasonic transducer. With an increasing operating frequency, the size of the transducer is decreased, resulting in higher signal attenuation [
2,
18]. It should be considered among frequency and attenuation. Owing to the limited frequencies of the commercial ultrasonic transducer, we did not have many tradeoffs for these factors during the experiments. The tradeoffs among these factors will drive the design for a specific application.
Binary bits were generated by a pattern generator. A waveform generator was used to generate ASK, FSK, and PSK signals. The output ultrasonic signals were measured by an oscilloscope.
Figure 3b shows the ultrasonic transducer (Olympus) that was used in water for FSK modulation [
19]. The transducer shown in
Figure 3c (Murata) was used in air for ASK and PSK modulation [
20].
3.2. OOK Modulation
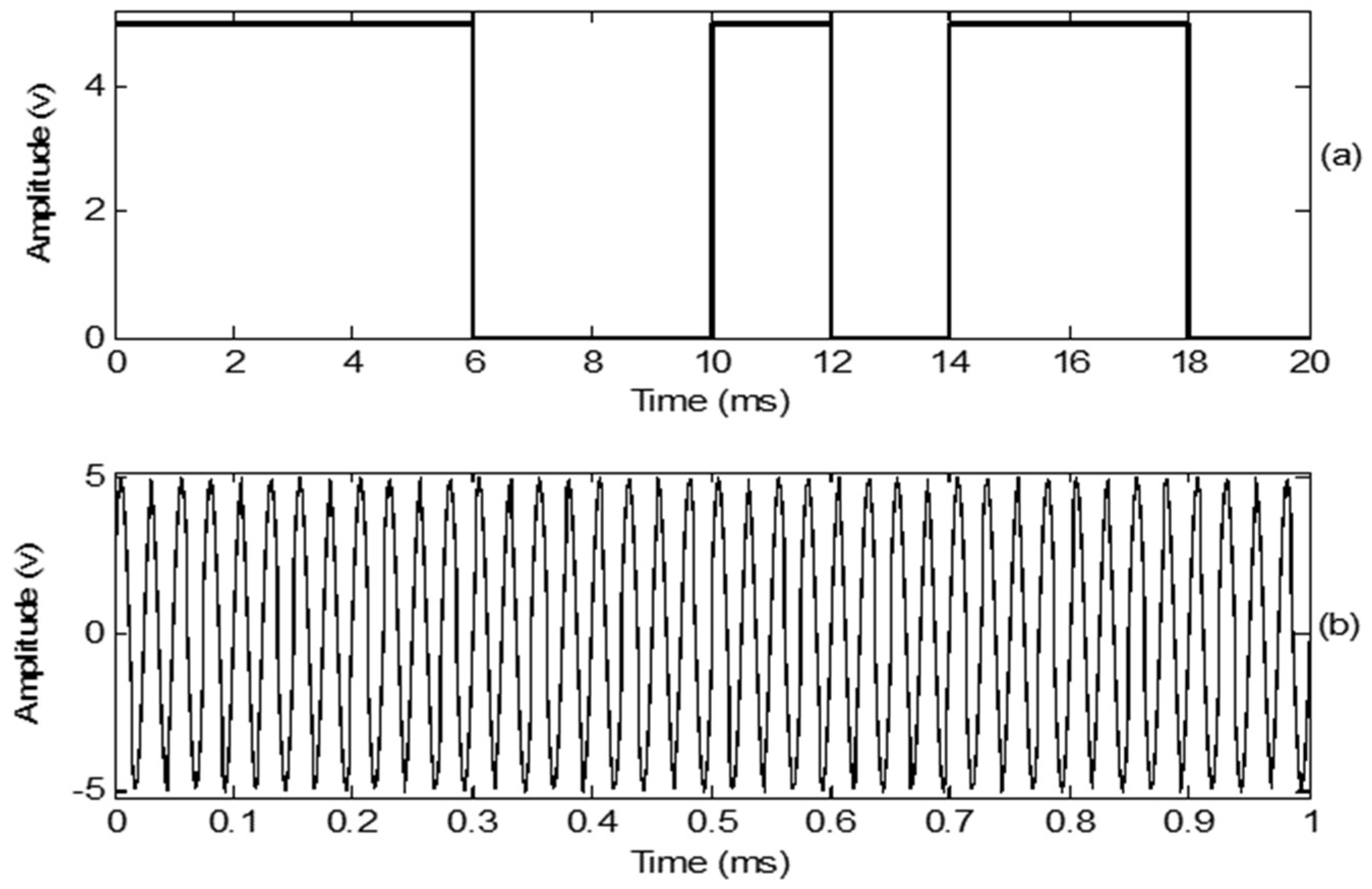
The input digital signal was a 10 bit binary stream (1110010110) at a data rate of 500 bps. The ultrasonic transducer frequency was 40 kHz for OOK and BPSK modulation. The amplitude was set to 5 V. The baseband digital and carrier signals are shown in
Figure 4.
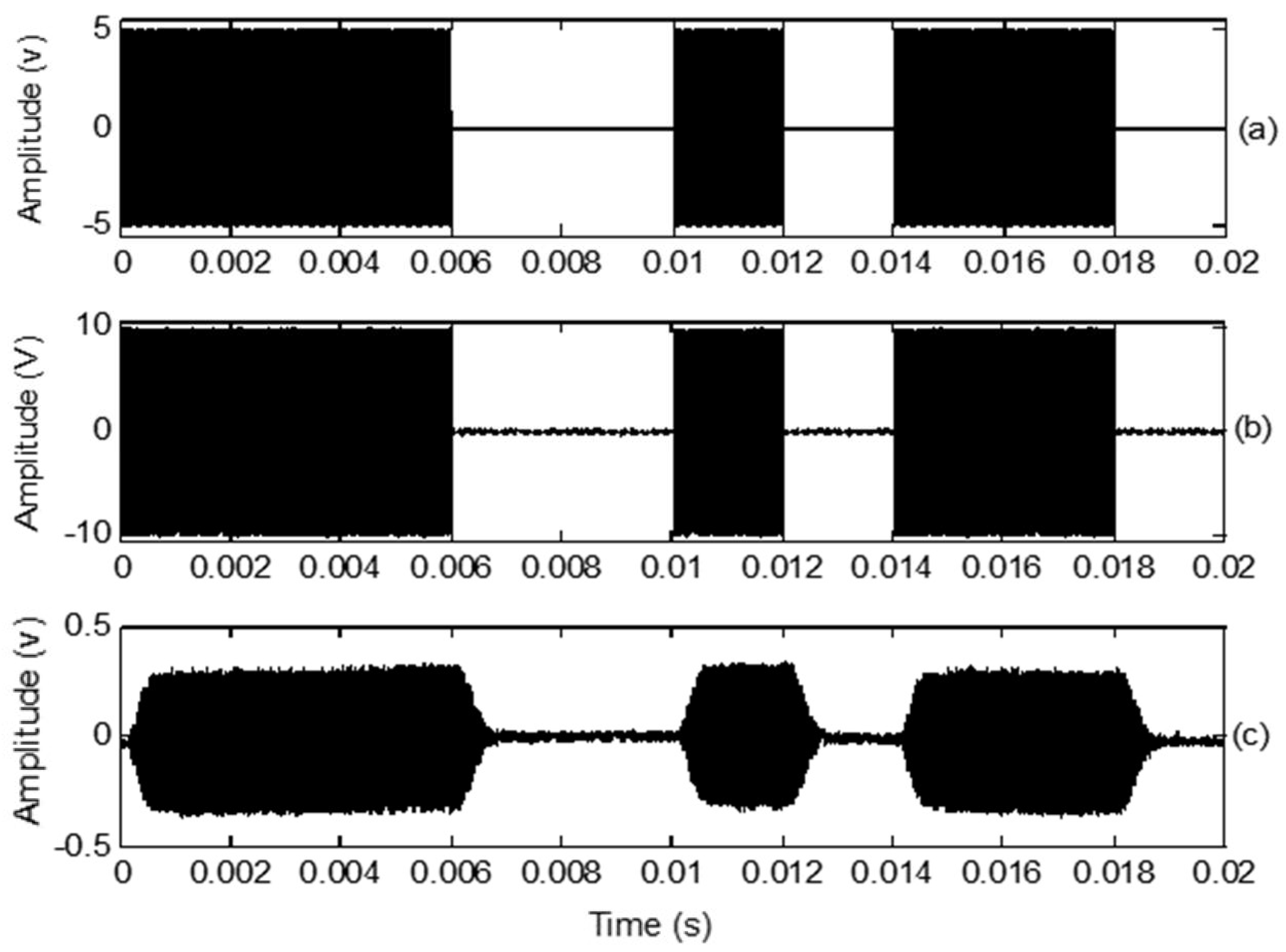
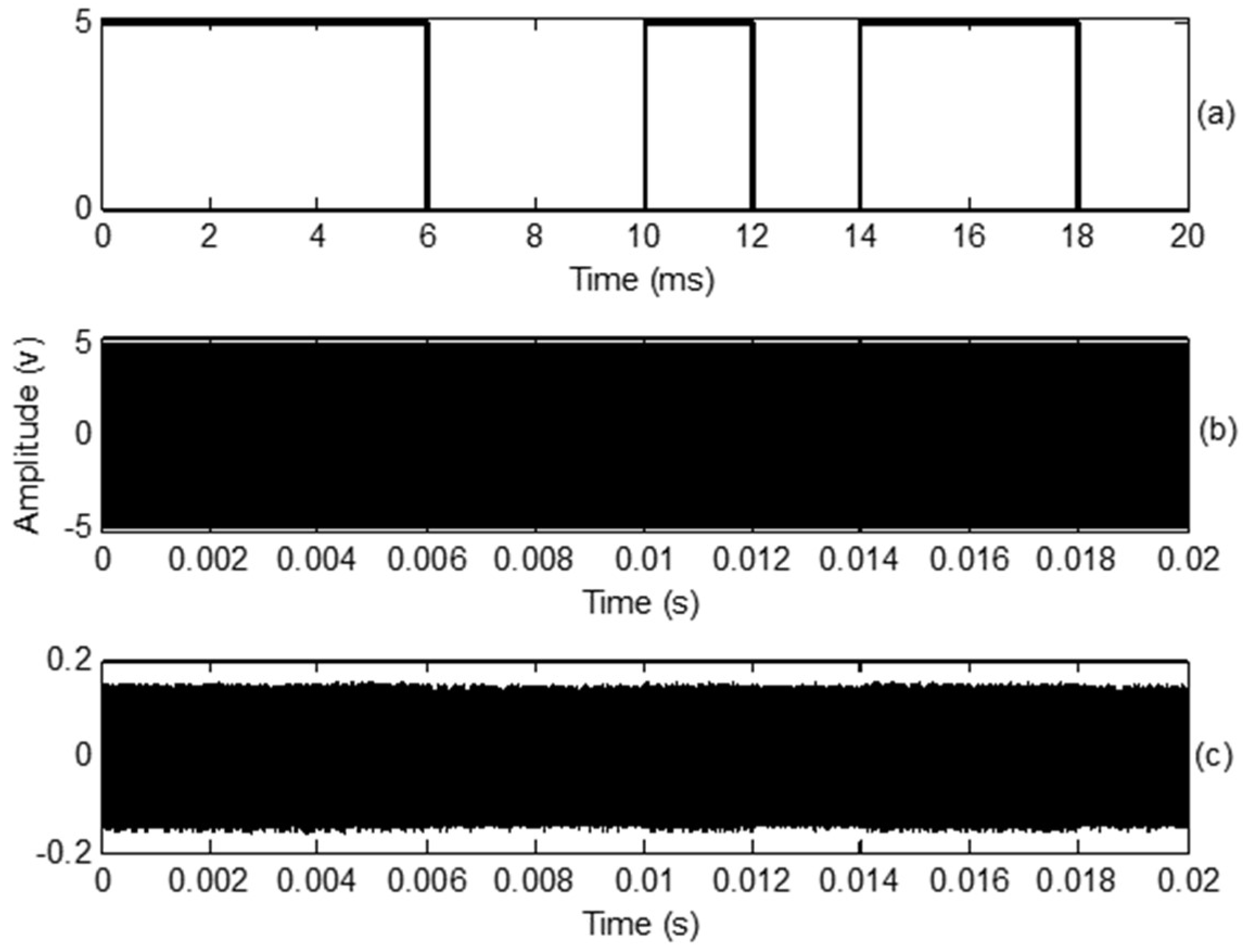
The simulated, transmitted, and received OOK signals are shown in
Figure 5. The carrier frequency was set to 40 kHz. The simulated OOK signal was theoretically calculated in MATLAB, as shown in
Figure 5a.
Figure 5b shows the oscilloscope trace of the transmitted OOK signals generated without connecting the ultrasonic transducer.
Figure 5c shows that the amplitude of the received OOK signals is sharply reduced; however, the symbol sequences are still distinguishable. The transition from 1 to 0 or 0 to 1 has a delay, which is caused by the impulse response of the transmitting and receiving transducers. At high data rates, the waveform was highly distorted.
3.3. BPSK Modulation
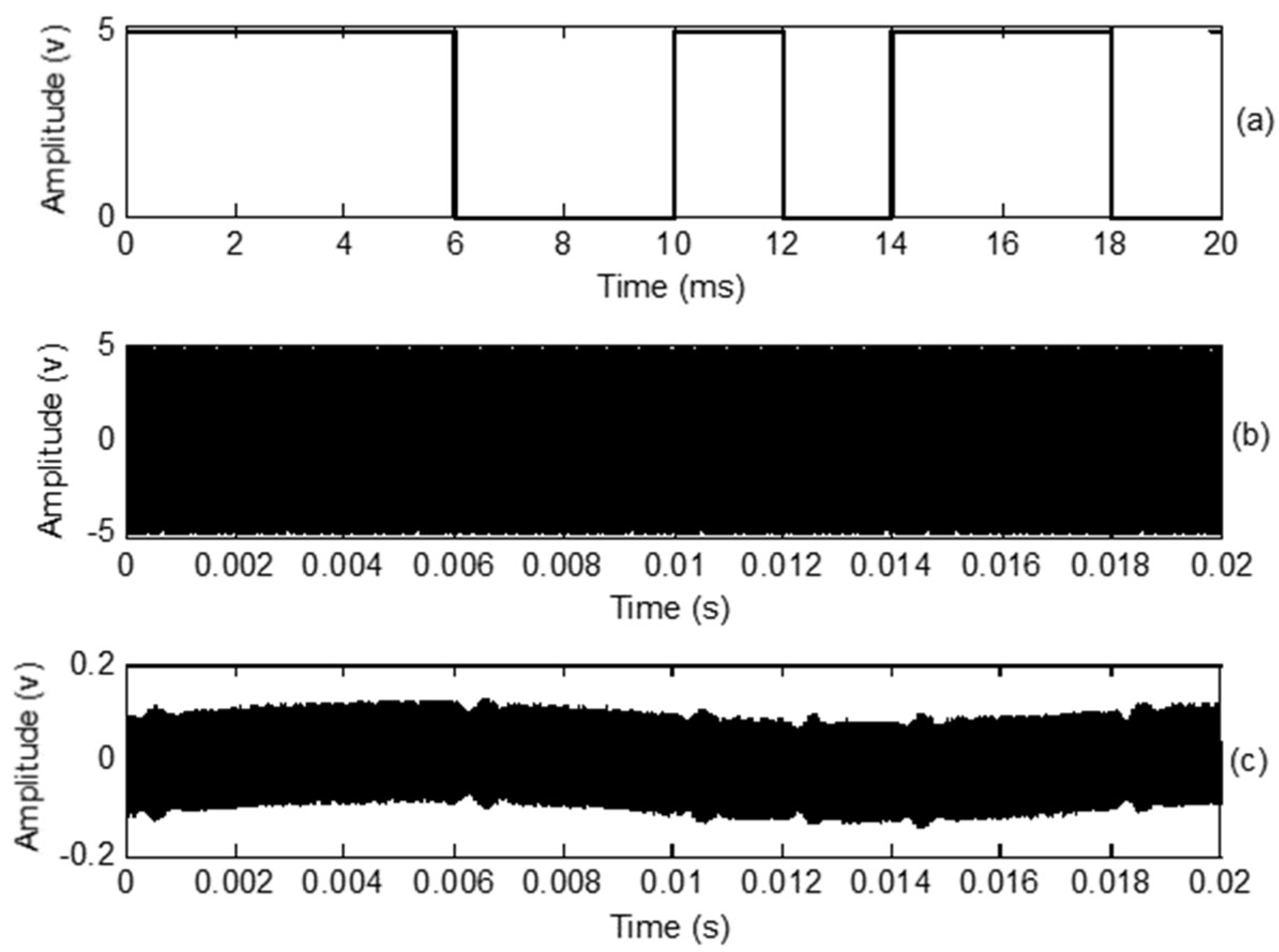
Figure 6 shows the baseband digital signal along with the transmitted and received BPSK signals. The carrier frequency was chosen as 40 kHz. A 180° phase change was imposed when the symbol changed from 1 to 0 or 0 to 1. As shown in
Figure 6c, there was a small “bump” when the symbol changed. The shape of the received BPSK signal was sinusoidal.
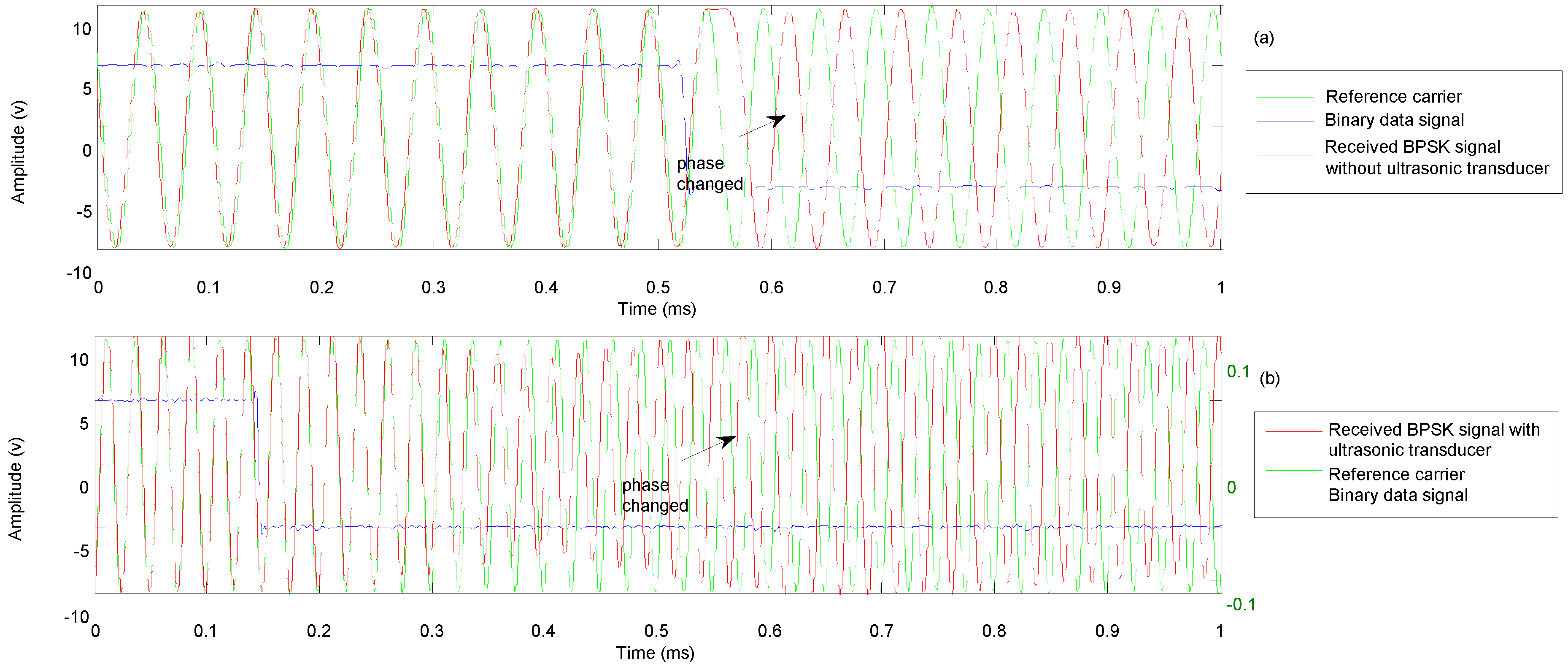
Figure 7 is an enlargement of the 1 to 0 transition in the transmitted (
Figure 7a) and received signals (
Figure 7b). It can be seen that the phase of the transmitted signal rapidly changes with the digital signal. The received signal is obtained after the transmitted signal passes through the propagation medium and both ultrasonic transducers. In
Figure 7b, it can be seen that the received signal remains in-phase with the reference carrier for some time, and the phase then changes along with an amplitude reduction. Finally, the amplitude recovers when a phase change of 180° is achieved. This causes the “bump” in the received signal.
3.4. BFSK Modulation
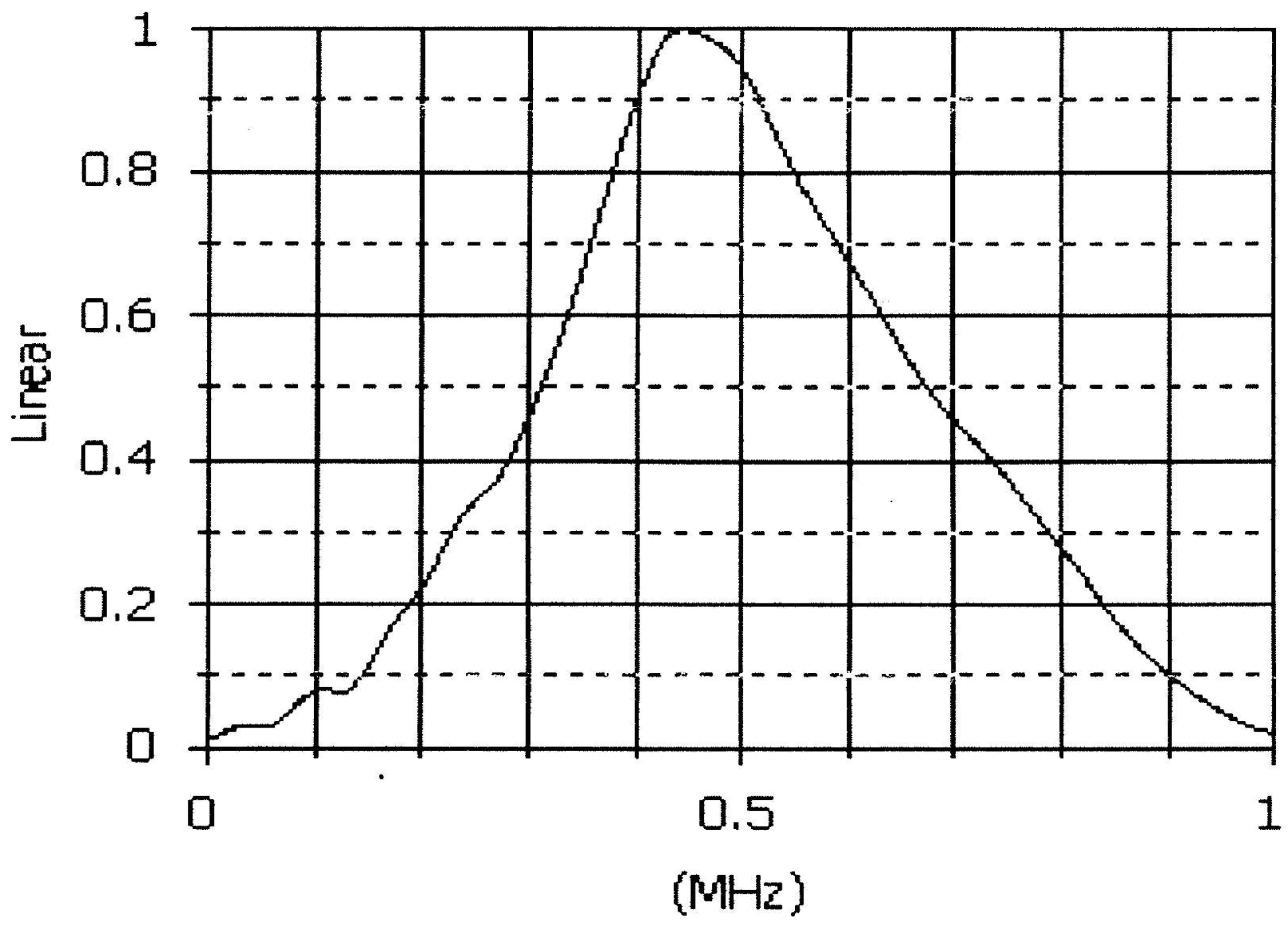
Two discrete frequencies are required for BFSK. According to our survey, almost all commercial ultrasonic transducers have a narrow bandwidth; empirical tests had to be carried out to obtain the same amplitude at different frequencies. We used 500 kHz central frequency ultrasonic transducers (Olympus Immersion Transducer V318) in our experiment. The transducer response to frequency is shown in
Figure 8. The test was performed five times and the average voltage was recorded. The amplitude test results are shown in
Table 1. The input amplitude is 5 V. The 470 and 490 kHz frequencies have similar amplitudes, as indicated by the bold characters. Finally, 470 and 490 kHz were selected to represent 0 and 1, respectively.
BFSK modulation was used for the experiment in water. The baseband digital signal, transmitted BFSK signal, and received BFSK signal are compared in
Figure 9. The received BFSK signal is not as severely delayed as the OOK and BPSK signals. The data rate and shape were also not affected much. The frequency shift was examined with an oscilloscope. The shift time depended on the data rate, as in the other two modulation schemes.
5. Conclusions and Future Work
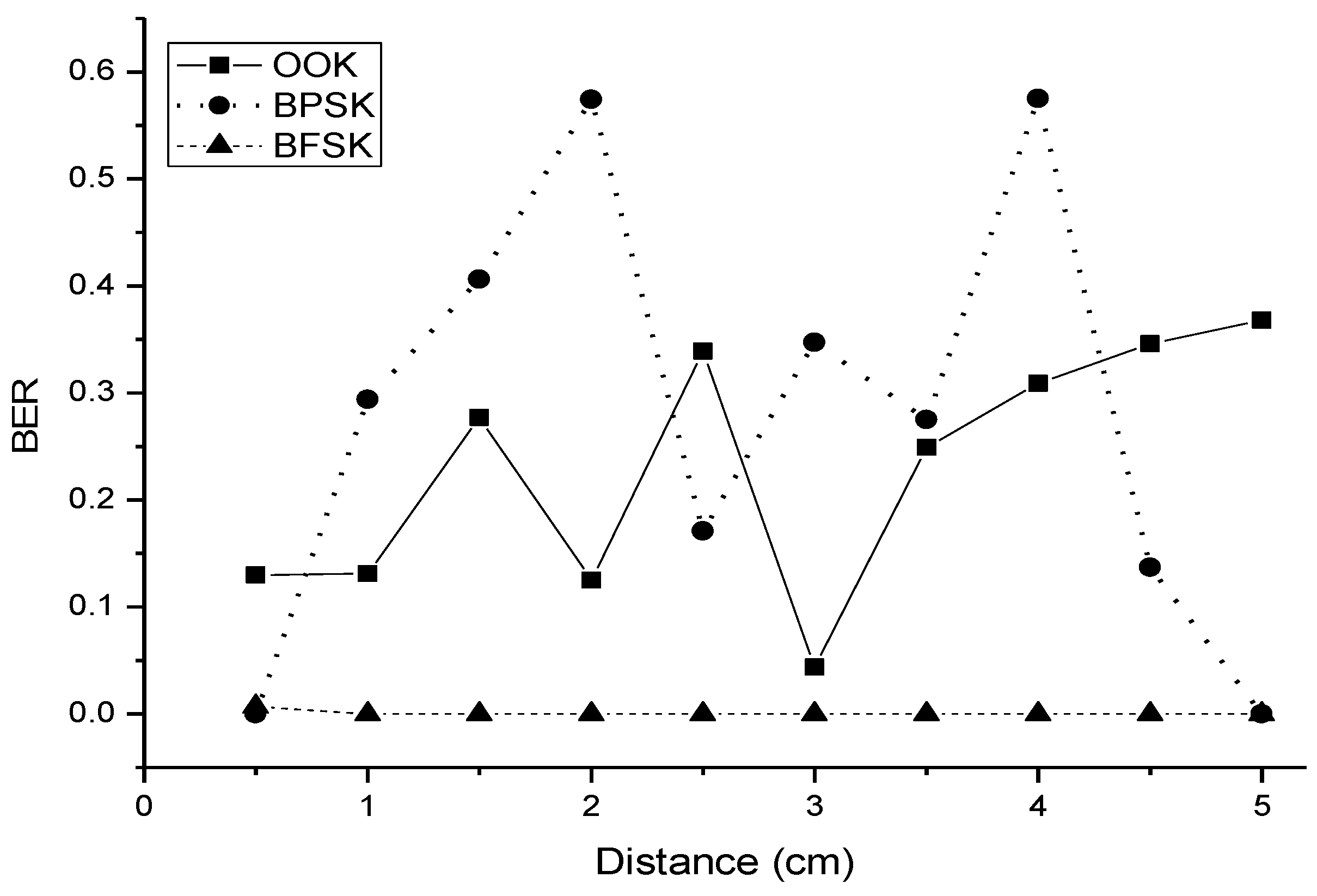
The novelty of this study was in its use of ultrasonic waves for wireless communication for healthcare systems. The experimental results for the three principal modulation schemes of OOK, BPSK, and BFSK are provided. The experiment was set up in both water and air. The binary data rate was set to 500 bps, and the carrier frequencies were 40 kHz for OOK and BPSK, and 470 kHz and 480 kHz for BFSK modulation. Although all three modulation schemes show potential for digital communication, BFSK had better performance in terms of both the BER and the shape of the modulation signal. OOK had a higher average voltage (0.3 V) than BFSK (0.18 V) and BPSK (0.15 V).
This study is based on an analysis of the feasibility of using ultrasonic communication. It is difficult to detect the signal from the receiver. To detect the signal, we studied the physical characteristics of ultrasound, frequency selection; investigated commercial transducers and their properties for analysis, and designed the experiment. In a future study, we will attempt to use an amplifier, apply robust modulation, and enhance the demodulation algorithm to reduce the BER.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}