Performance Evaluation of LoRa Considering Scenario Conditions

 ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
- -
- An exhaustive evaluation of LoRaWAN with emphasis in its adaptation capabilities is presented.
- -
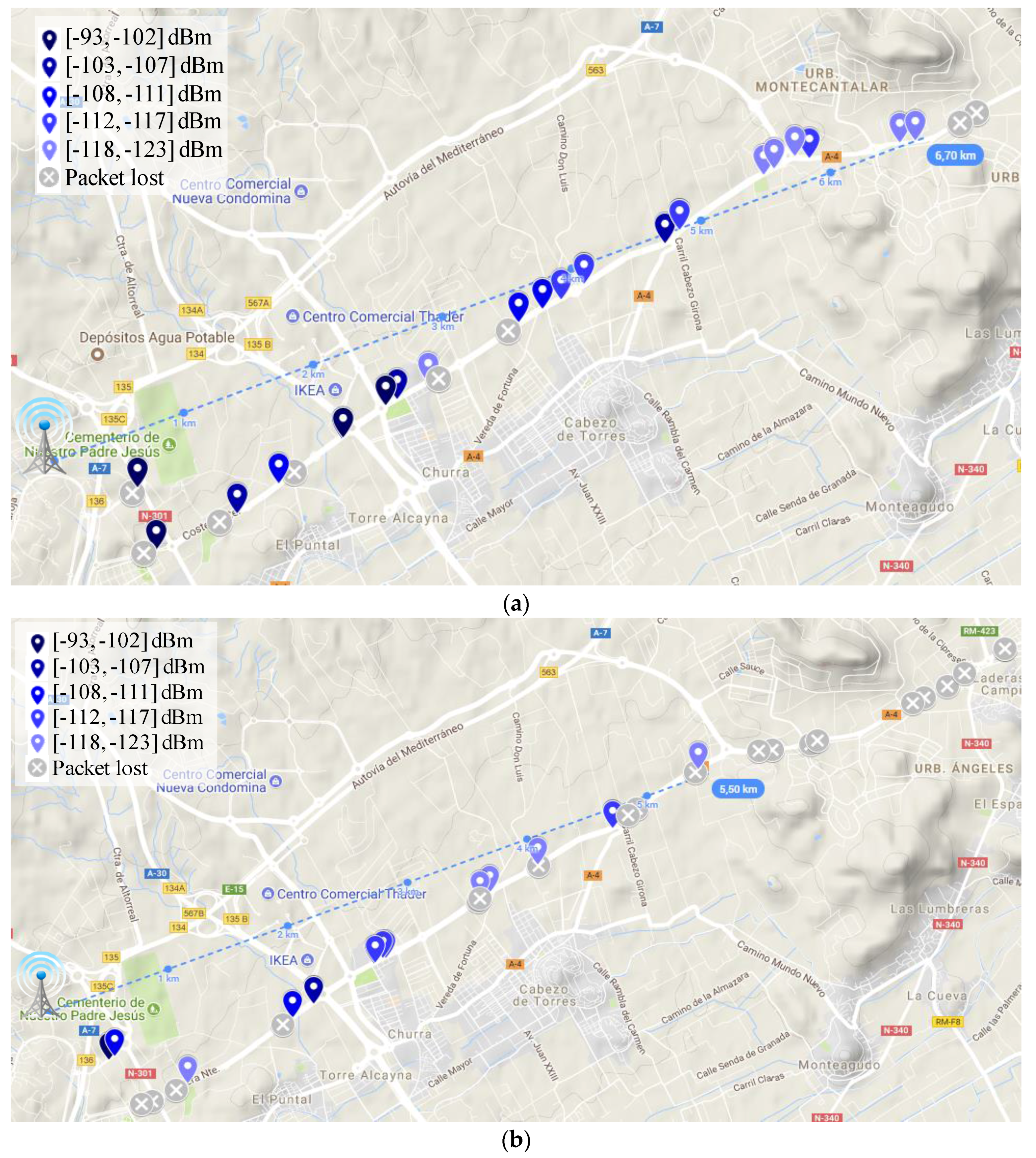
- The performance of LoRaWAN in different environments with pre-defined propagation conditions, namely, urban, suburban, and rural is explored. The impact of end-node mobility on the system performance is also discussed.
- -
- Under this diversity of scenarios, the best LoRaWAN configuration for each use case is identified and discussed.
2. Related Work
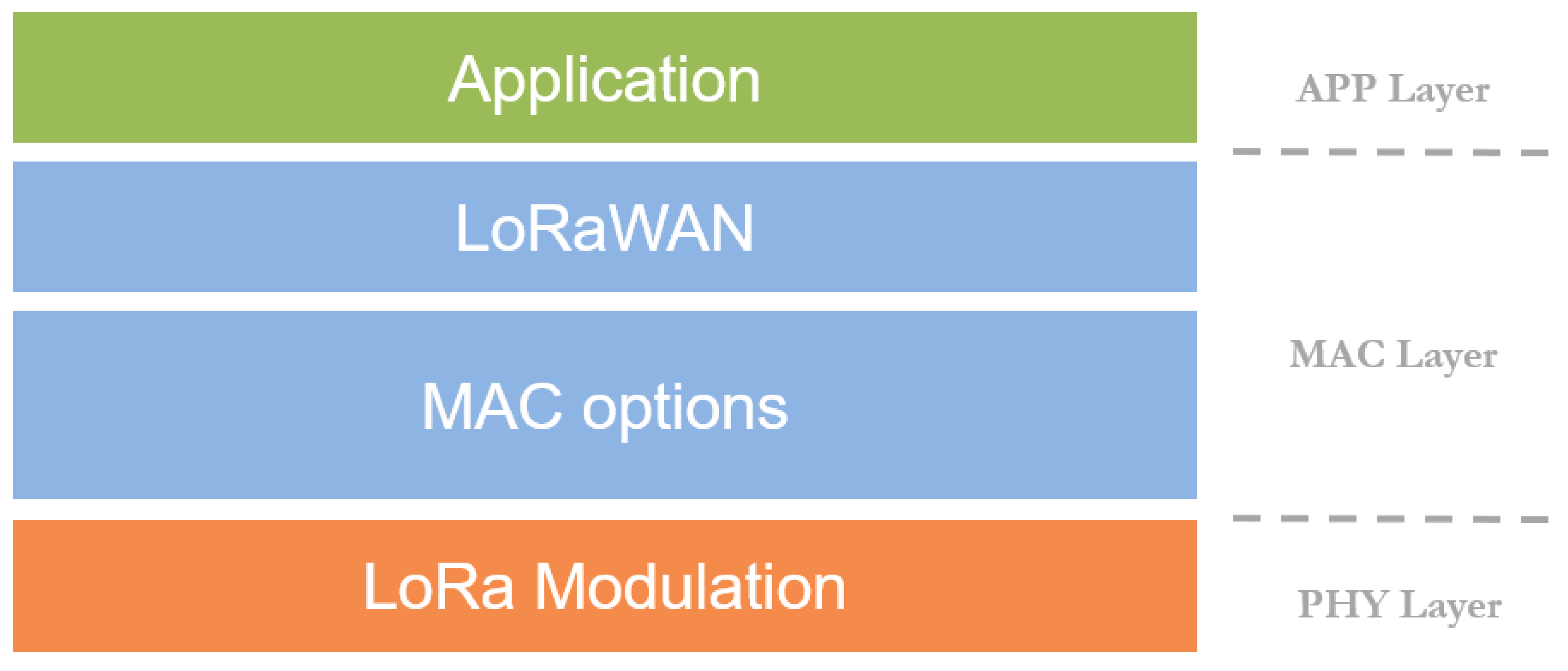
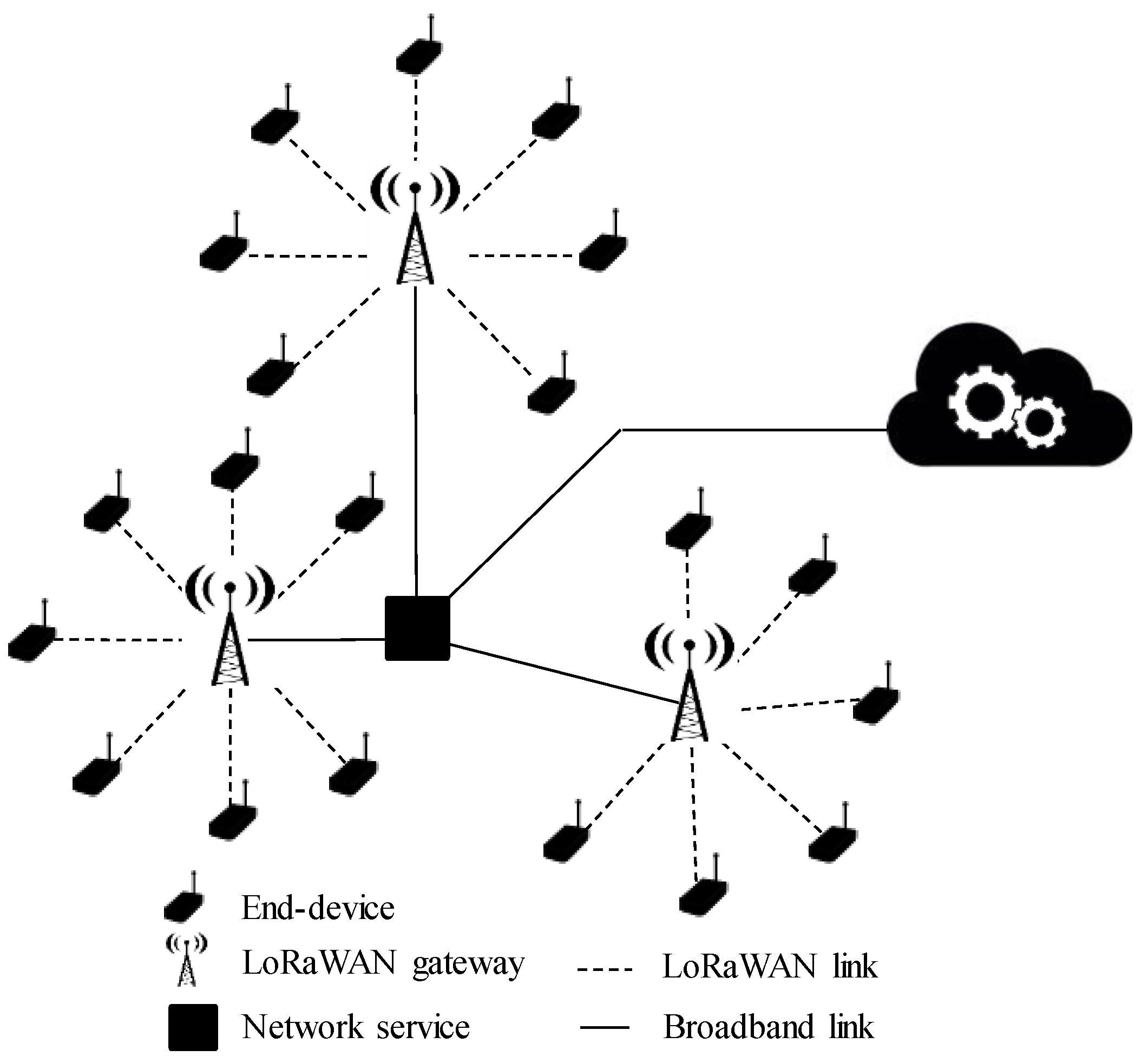
3. LoRaWAN
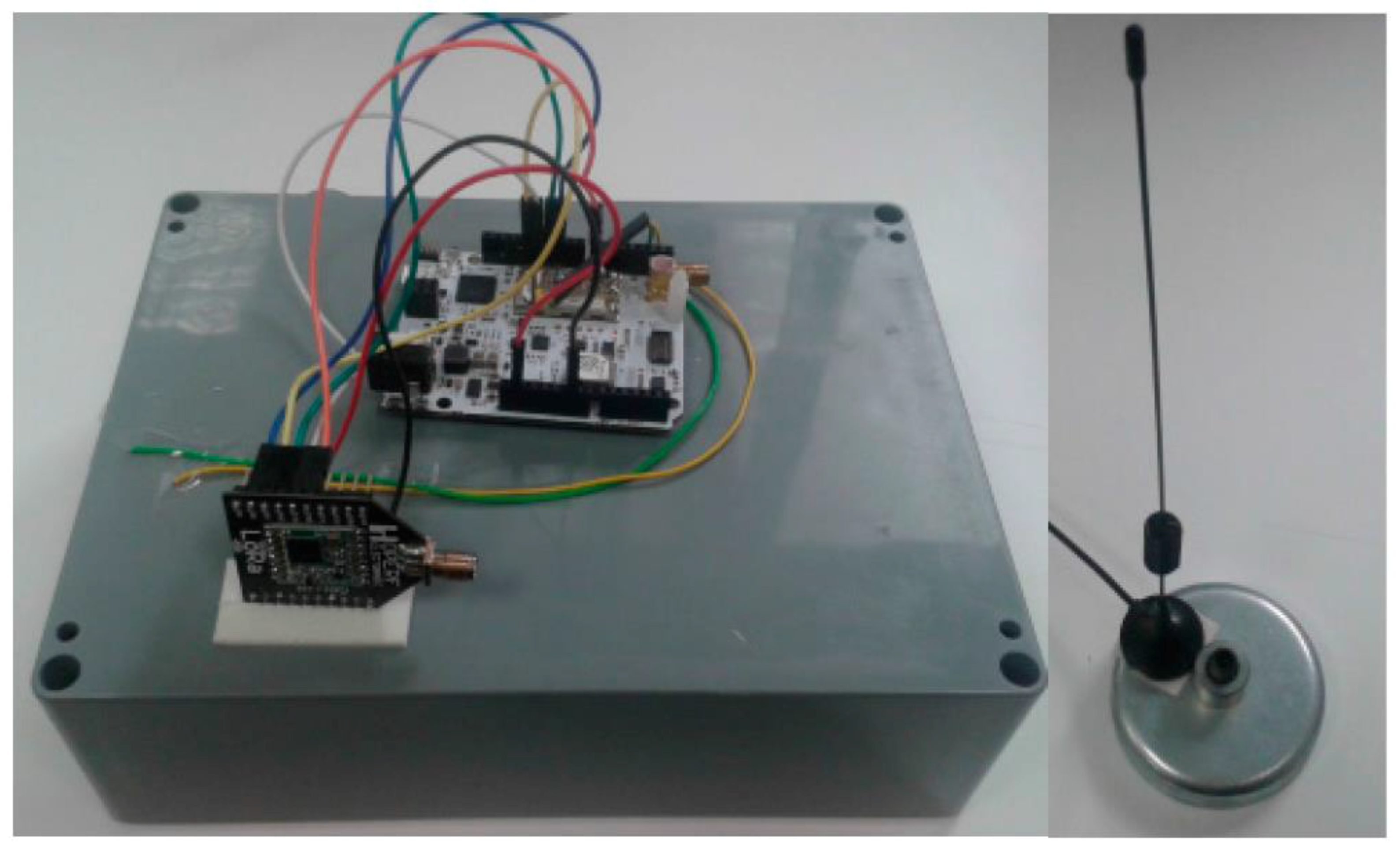
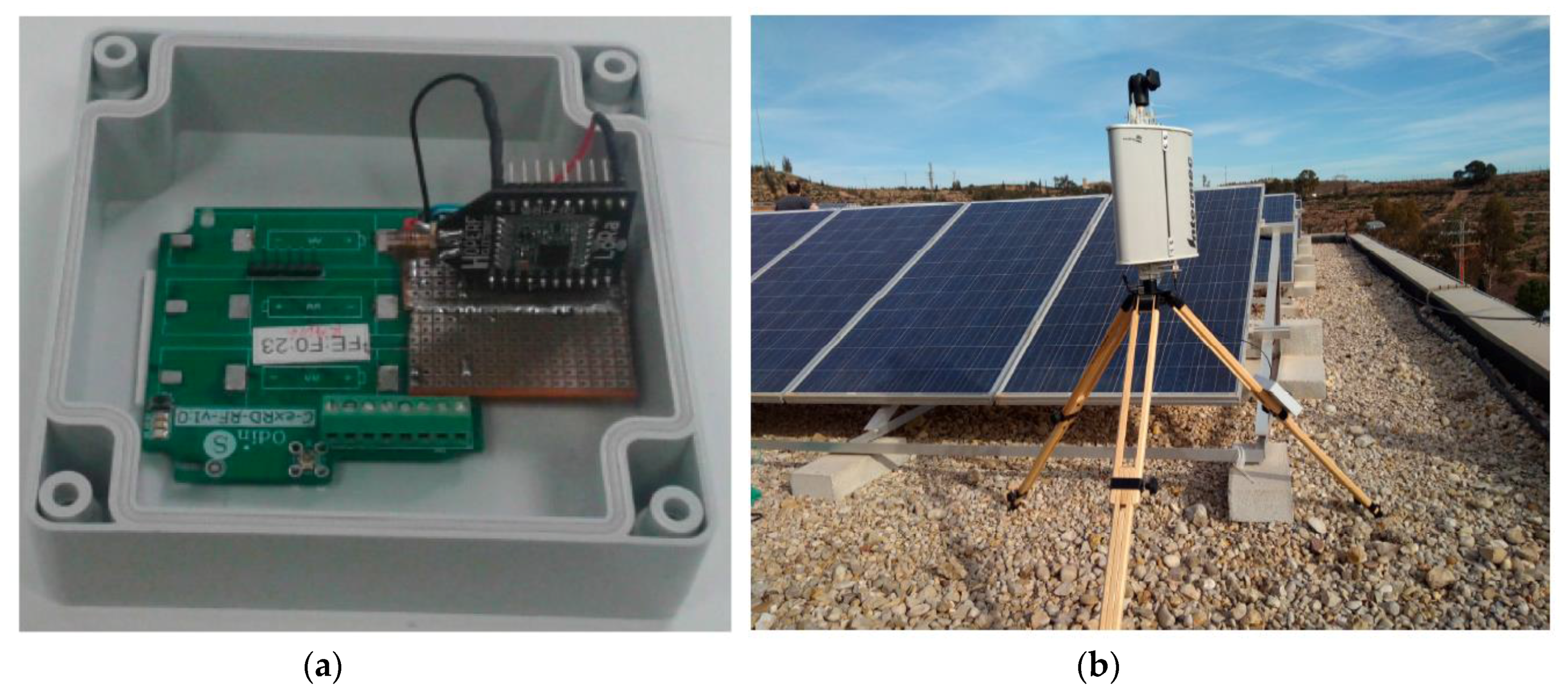
4. Material and Methods
5. Results and Discussion
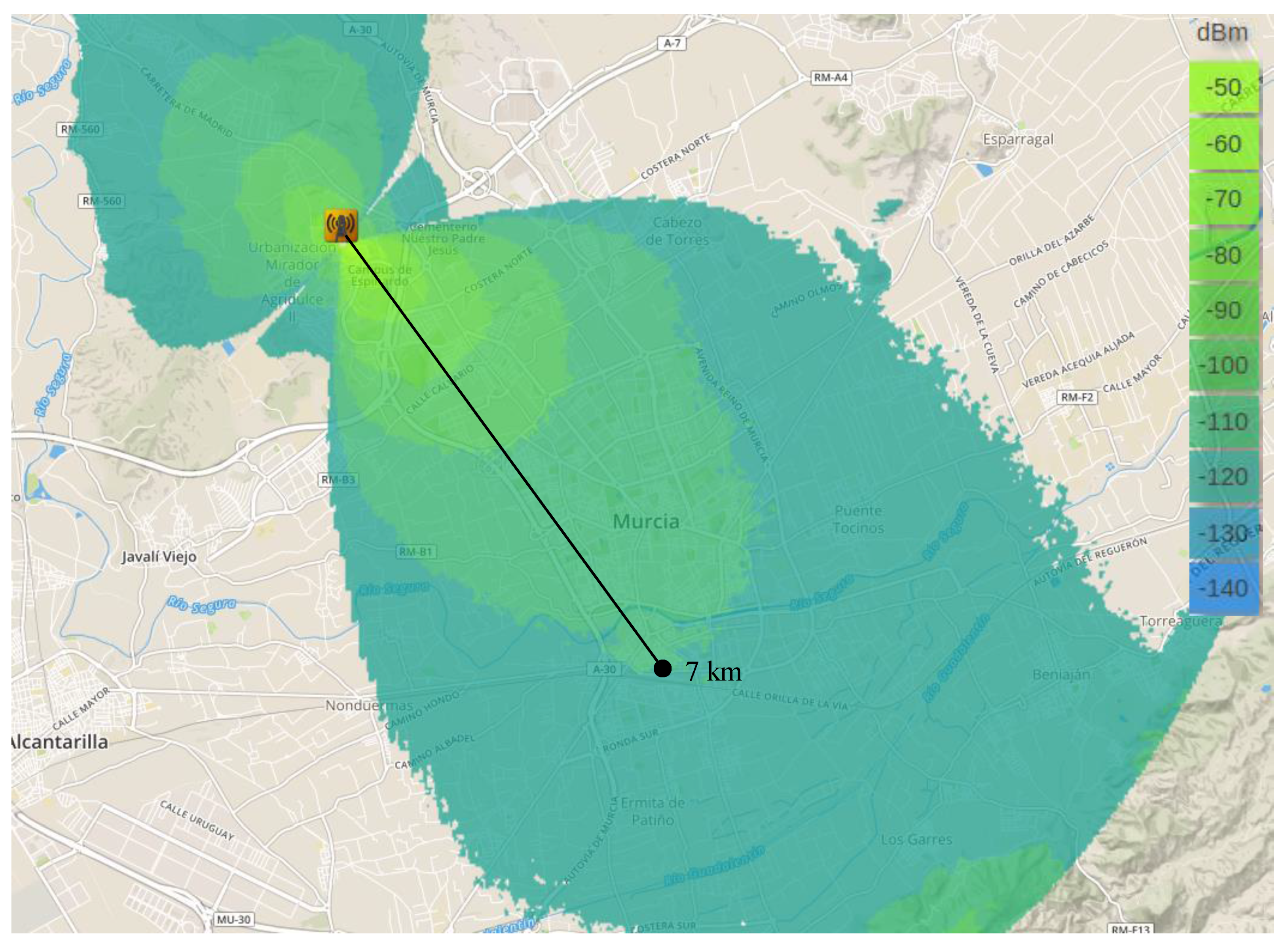
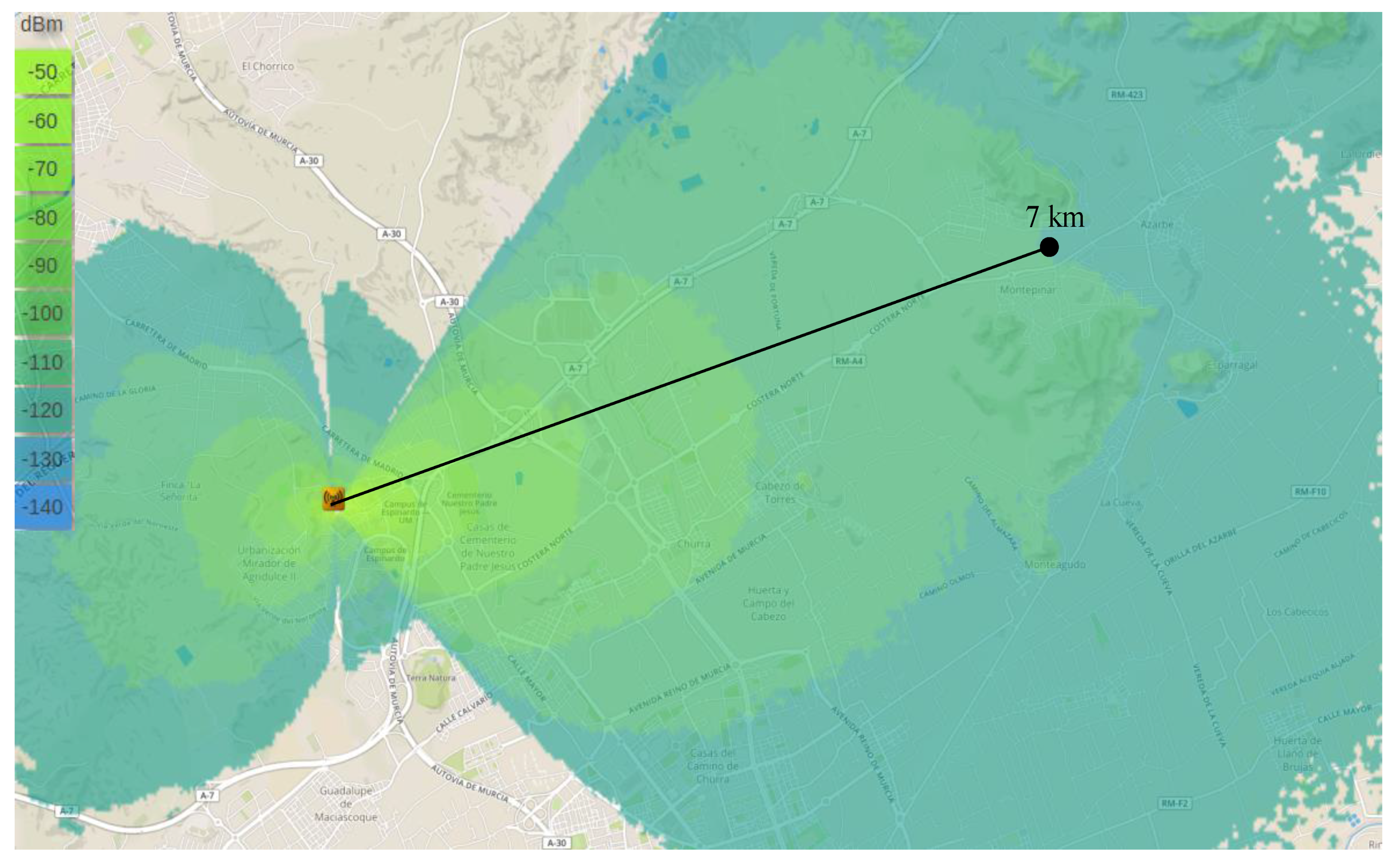
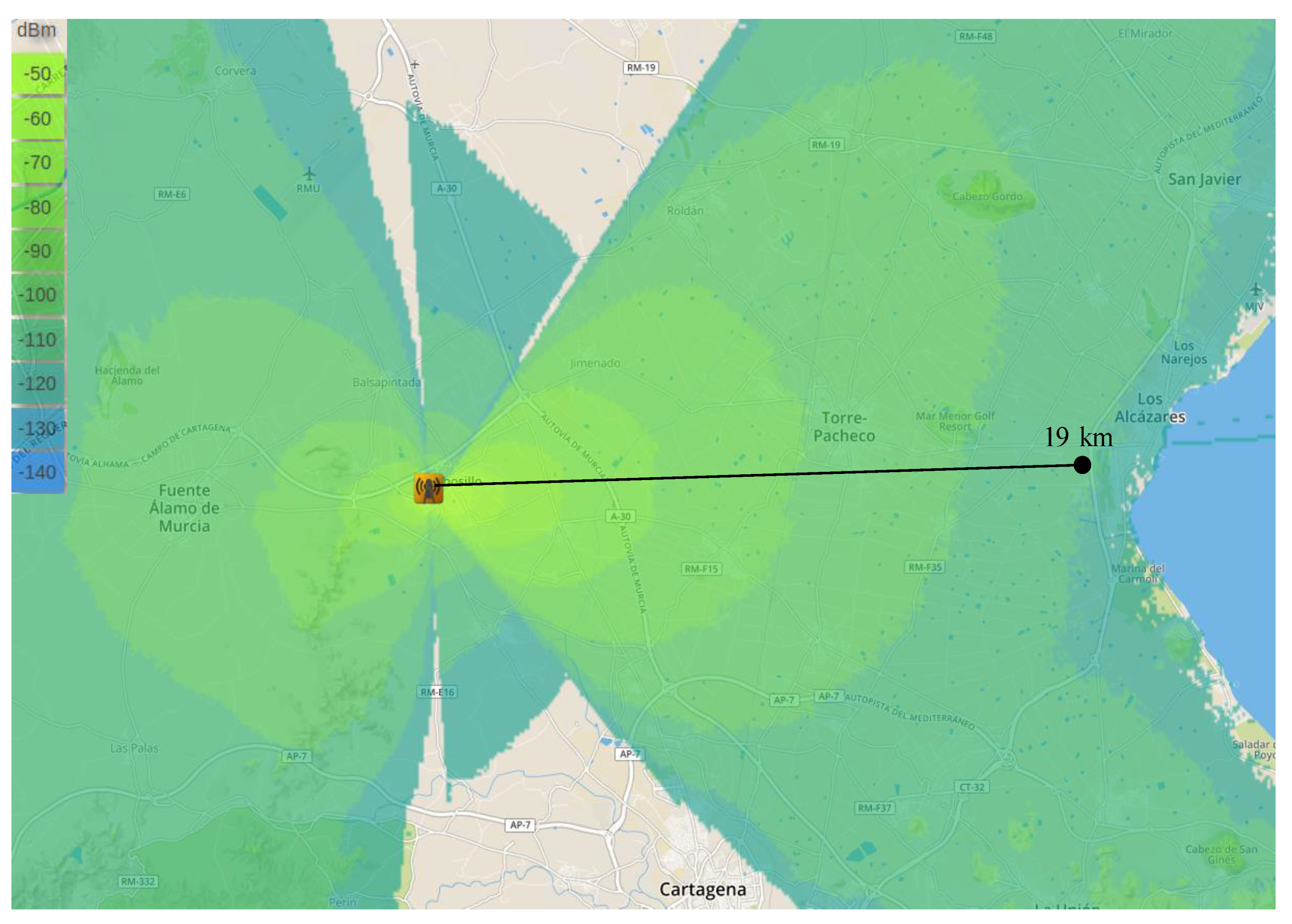
5.1. Theoretical Coverage Study
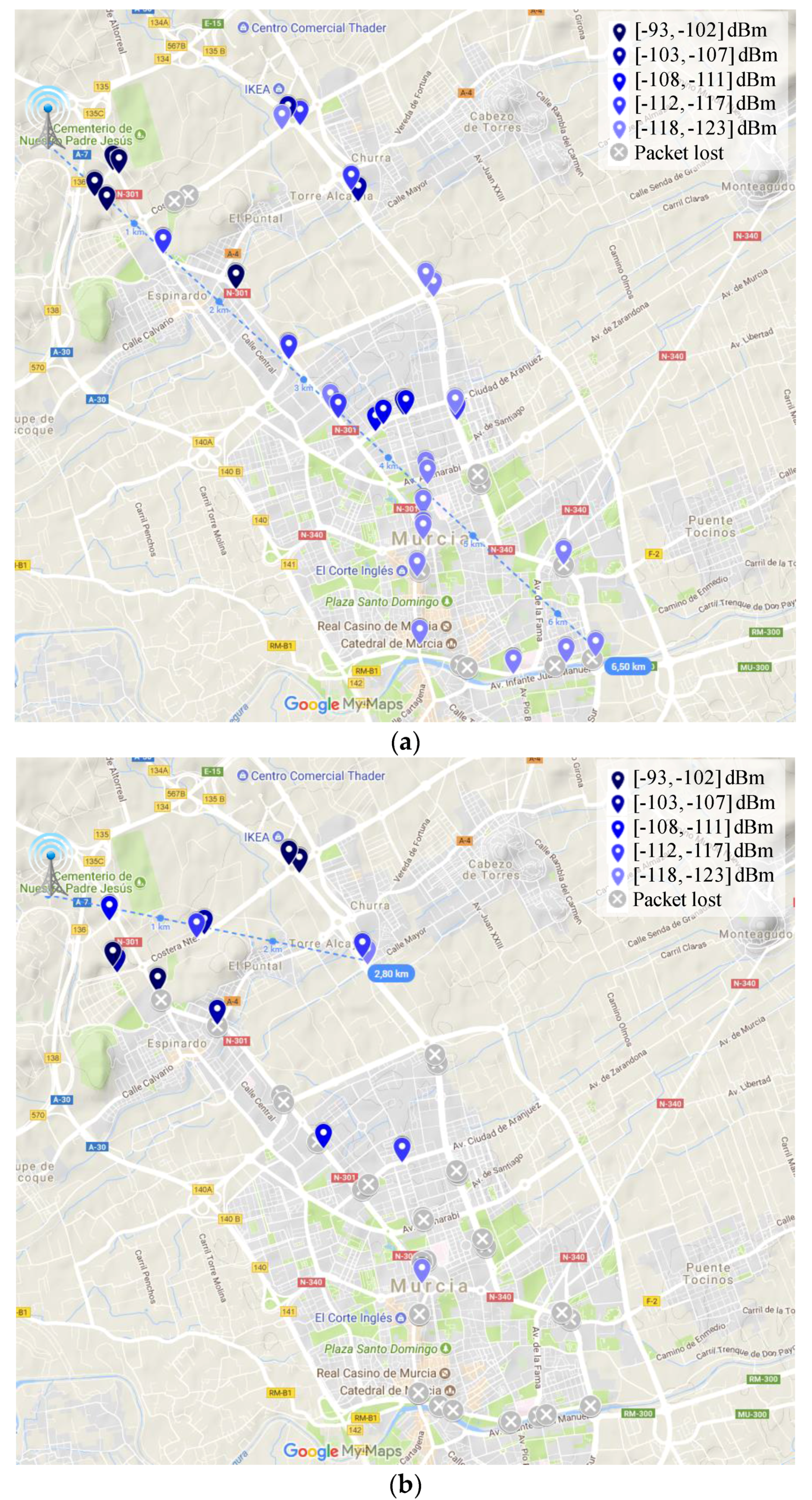
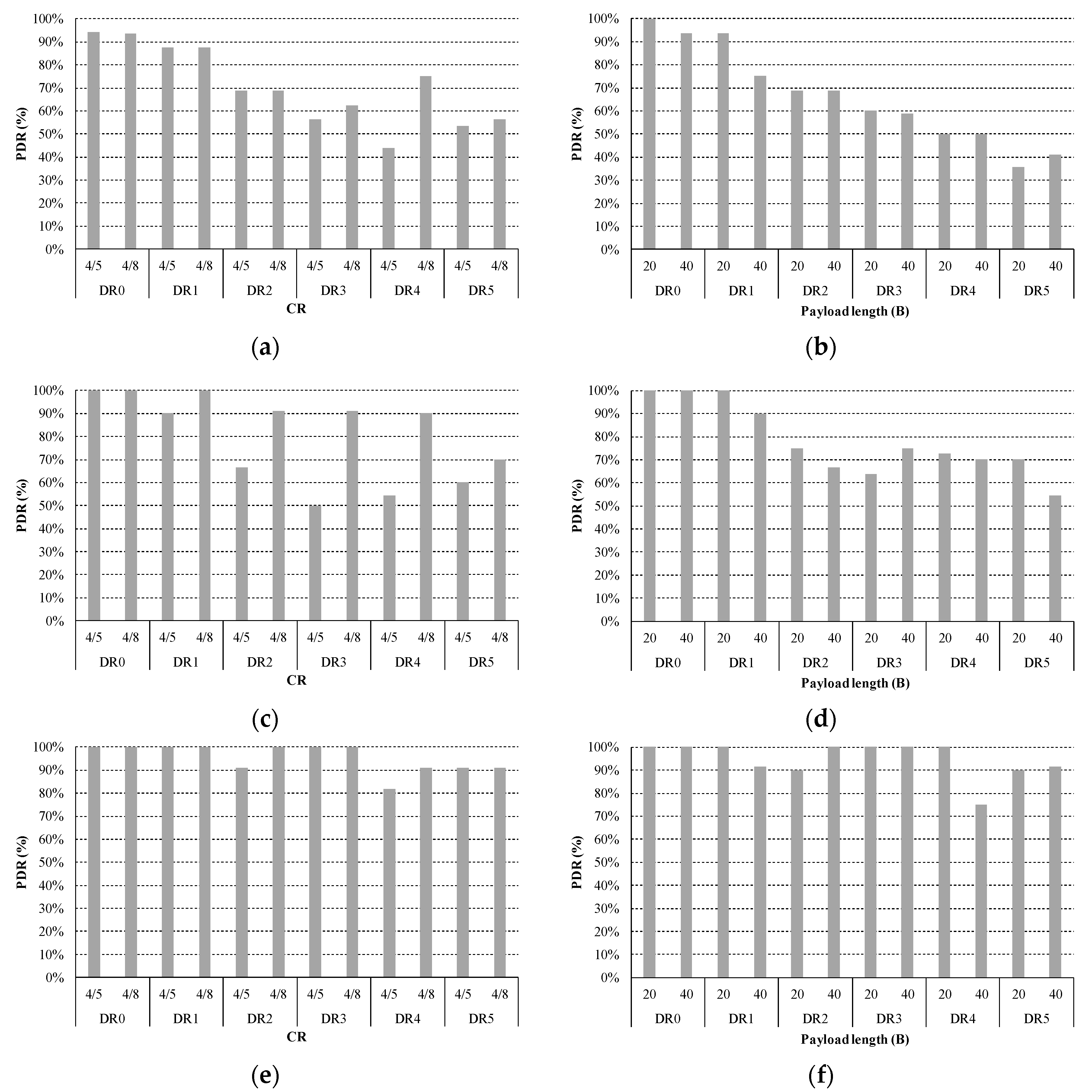
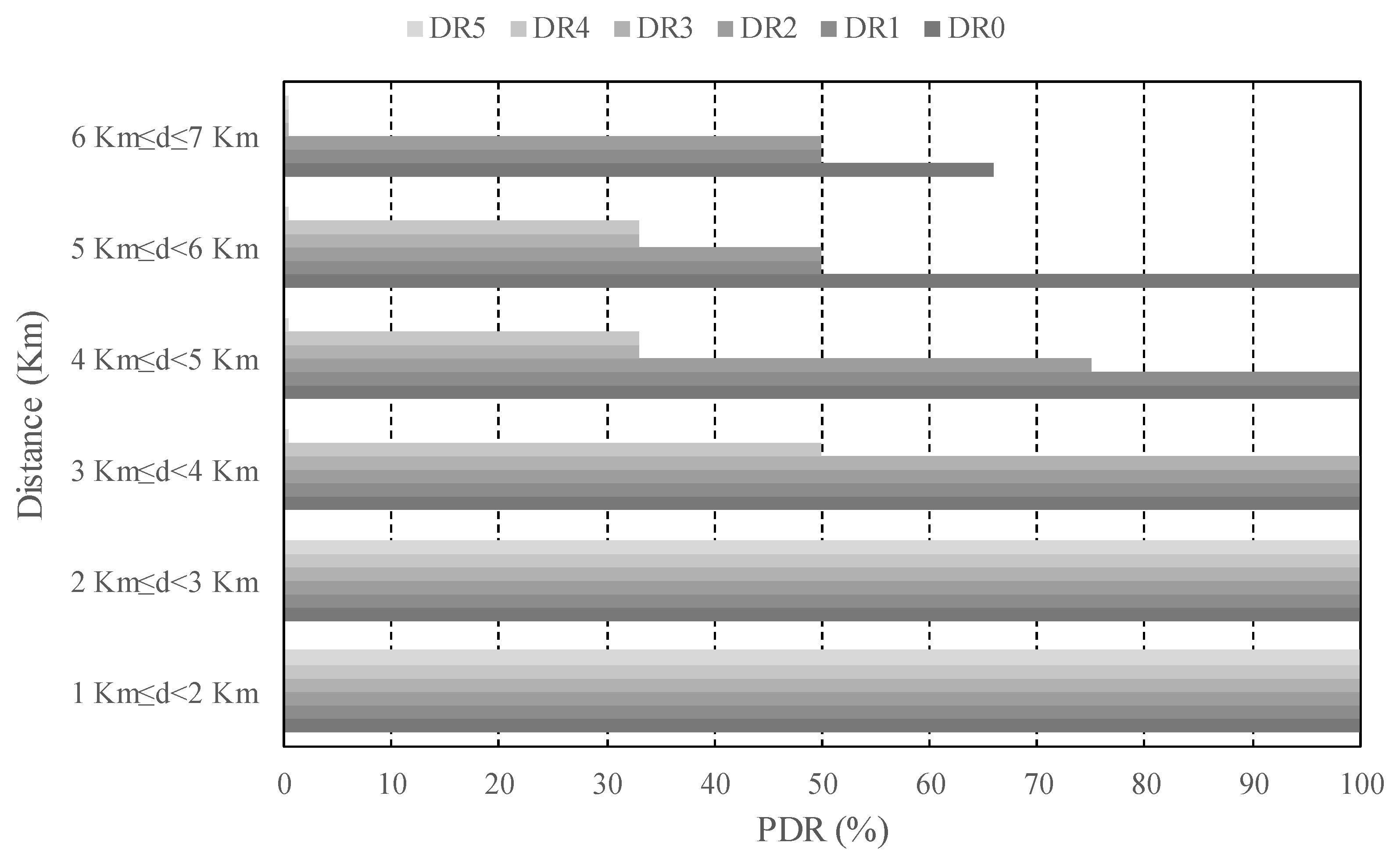
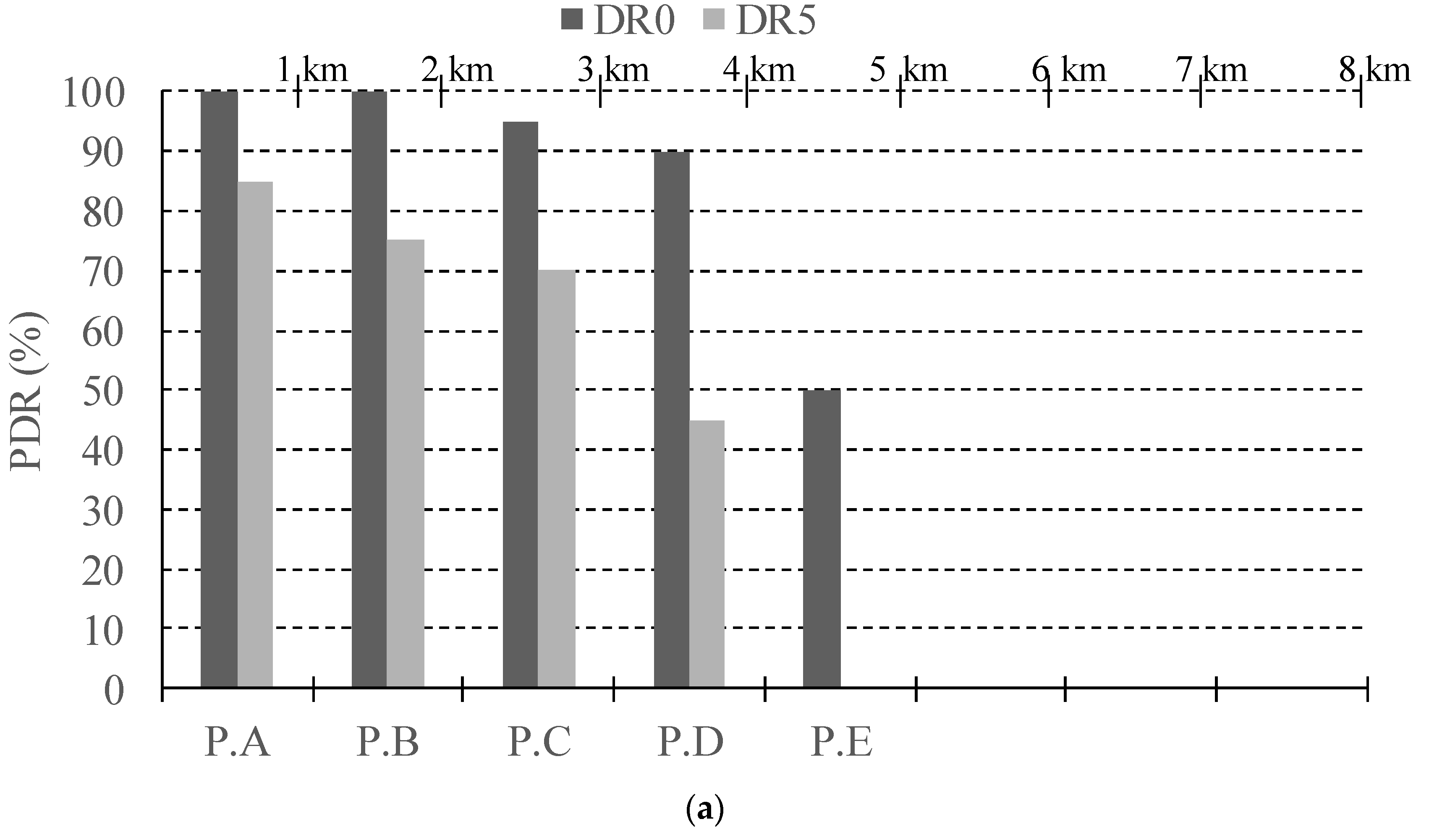
5.2. Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sanchez-Iborra, R.; Cano, M.-D. State of the art in LP-WAN solutions for industrial IoT services. Sensors 2016, 16, 708. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Gomez, J.; Sanchez-Iborra, R.; Skarmeta, A. Experimental comparison of LoRa and FSK as IoT-communication-enabling modulations. In Proceedings of the IEEE Global Communications Conference (Globecom’17), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Raza, U.; Kulkarni, P.; Sooriyabandara, M. Low Power Wide Area Networks: An Overview. IEEE Commun. Surv. Tutor. 2017, 19, 855–873. [Google Scholar] [CrossRef]
- LoRa-Alliance. A Technical Overview of LoRa and LoRaWAN; White Paper; The LoRa Alliance: San Ramon, CA, USA, 2015. [Google Scholar]
- Sigfox. M2M and IoT Redefined through Cost Effective and Energy Optimized Connectivity; White Paper; Sigfox: Labège, France, 2014. [Google Scholar]
- Sanchez-Iborra, R.; Sanchez-Gomez, J.; Santa, J.; Fernandez, P.J.; Skarmeta, A. Integrating LP-WAN communications within the vehicular ecosystem. J. Internet Serv. Inf. Secur. 2017, 7, 45–56. [Google Scholar]
- Herrera-Tapia, J.; Hernandez-Orallo, E.; Tomas, A.; Calafate, C.; Cano, J.-C.; Zennaro, M.; Manzoni, P. Evaluating the use of sub-gigahertz wireless technologies to improve message delivery in opportunistic networks. In Proceedings of the 14th IEEE International Conference on Networking, Sensing and Control, (ICNSC 2017), Calabria, Italy, 16–18 May 2017. [Google Scholar]
- CloudRF—Online Radio Planning. Available online: https://cloudrf.com/ (accessed on 20 December 2017).
- Parada, R.; Cárdenes-Tacoronte, D.; Monzo, C.; Melià-Seguí, J. Internet of THings Area Coverage Analyzer (ITHACA) for complex topographical scenarios. Symmetry 2017, 9, 237. [Google Scholar] [CrossRef]
- Georgiou, O.; Raza, U. Low Power Wide Area Network Analysis: Can LoRa Scale? IEEE Wirel. Commun. Lett. 2017, 6, 162–165. [Google Scholar] [CrossRef]
- Mikhaylov, K.; Petäjäjärv, J.; Hänninen, T. Analysis of the capacity and scalability of the LoRa wide area network technology. In Proceedings of the 22th European Wireless Conference, Oulu, Finland, 18–20 May 2016; pp. 1–6. [Google Scholar]
- Bankov, D.; Khorov, E.; Lyakhov, A. On the limits of LoRaWAN channel access. In Proceedings of the International Conference on Engineering and Telecommunication (EnT), Moscow, Russia, 29–30 November 2016; pp. 10–14. [Google Scholar]
- Naoui, S.; Elhdhili, M.E.; Saidane, L.A. Enhancing the security of the IoT LoraWAN architecture. In Proceedings of the International Conference on Performance Evaluation and Modeling in Wired and Wireless Networks (PEMWN), Paris, France, 22–25 November 2016; pp. 1–7. [Google Scholar]
- Weber, P.; Jackle, D.; Rahusen, D.; Sikora, A. IPv6 over LoRaWAN. In Proceedings of the 3rd International Symposium on Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Offenburg, Germany, 26–27 September 2016; pp. 75–79. [Google Scholar]
- Petric, T.; Goessens, M.; Nuaymi, L.; Toutain, L.; Pelov, A. Measurements, performance and analysis of LoRa FABIAN, a real-world implementation of LPWAN. In Proceedings of the IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–7. [Google Scholar]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A study of LoRa: Long Range & low power networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar]
- Haxhibeqiri, J.; Karaagac, A.; Van den Abeele, F.; Joseph, W.; Moerman, I.; Hoebeke, J. LoRa indoor coverage and performance in an industrial environment: Case study. In Proceedings of the 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–8. [Google Scholar]
- Petajajarvi, J.; Mikhaylov, K.; Roivainen, A.; Hanninen, T.; Pettissalo, M. On the coverage of LPWANs: Range evaluation and channel attenuation model for LoRa technology. In Proceedings of the 14th International Conference on ITS Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015; pp. 55–59. [Google Scholar]
- Petäjäjärvi, J.; Mikhaylov, K.; Pettissalo, M.; Janhunen, J.; Iinatti, J. Performance of a low-power wide-area network based on LoRa technology: Doppler robustness, scalability, and coverage. Int. J. Distrib. Sens. Netw. 2017, 13, 1–16. [Google Scholar] [CrossRef]
- Wixted, A.J.; Kinnaird, P.; Larijani, H.; Tait, A.; Ahmadinia, A.; Strachan, N. Evaluation of LoRa and LoRaWAN for wireless sensor networks. In Proceedings of the IEEE Sensors, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cellular Communications | WSN | IoT |
|---|---|---|
| High bandwidth | Limited bandwidth | Limited bandwidth |
| Continuous traffic | Sporadic traffic | Sporadic traffic |
| Limited number of devices | High number of devices | Huge number of devices |
| Small area cells | Very small coverage | Wide area cells |
| Expensive network and devices | Reduced network and devices costs | Reduced network and device costs |
| End-Device | Base-Station | |
|---|---|---|
| Output Power | +14 dBm | +14 dBm |
| Antenna Gain | +5 dBi | +8 dBi |
| Central frequency | 868 MHz | 868 MHz |
| RX Sensitivity SF = 7 | −123.0 dBm | −126.5 dBm |
| RX Sensitivity SF = 8 | −126.0 dBm | −129.0 dBm |
| RX Sensitivity SF = 9 | −129.0 dBm | −131.5 dBm |
| RX Sensitivity SF = 10 | −132.0 dBm | −134.0 dBm |
| RX Sensitivity SF = 11 | −133.0 dBm | −136.5 dBm |
| RX Sensitivity SF = 12 | −136.0 dBm | −139.5 dBm |
| Scenario | Average Speed (km/h) (Conf. Interval, α = 0.05) | Min. Speed (km/h) | Max. Speed (km/h) |
|---|---|---|---|
| Urban | 22.3 (1.9) | 0 | 53.5 |
| Suburban | 32.6 (2.3) | 0 | 57.2 |
| Rural | 32.5 (1.5) | 0 | 70.2 |
| DR | Urban Scenario | Suburban Scenario | Rural Scenario |
|---|---|---|---|
| DR0 | 6.5 | 6.7 | 18.5 |
| DR1 | 5.4 | 5.8 | 13.7 |
| DR2 | 4.5 | 5.7 | 11.6 |
| DR3 | 4.4 | 5.3 | 11.5 |
| DR4 | 4 | 5.0 | 10.3 |
| DR5 | 2.8 | 5.5 | 9.6 |
| DR | Payload = 20 Bytes CR = 4/5|CR = 4/8 | Payload = 40 Bytes CR = 4/5|CR = 4/8 |
|---|---|---|
| DR0 | 1810|2499 | 2466|3547 |
| DR1 | 987|1380 | 1315|1905 |
| DR2 | 453|625 | 616|887 |
| DR3 | 247|345 | 329|476 |
| DR4 | 134|189 | 185|271 |
| DR5 | 72|103 | 103|152 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanchez-Iborra, R.; Sanchez-Gomez, J.; Ballesta-Viñas, J.; Cano, M.-D.; Skarmeta, A.F. Performance Evaluation of LoRa Considering Scenario Conditions. Sensors 2018, 18, 772. https://doi.org/10.3390/s18030772
Sanchez-Iborra R, Sanchez-Gomez J, Ballesta-Viñas J, Cano M-D, Skarmeta AF. Performance Evaluation of LoRa Considering Scenario Conditions. Sensors. 2018; 18(3):772. https://doi.org/10.3390/s18030772
Chicago/Turabian StyleSanchez-Iborra, Ramon, Jesus Sanchez-Gomez, Juan Ballesta-Viñas, Maria-Dolores Cano, and Antonio F. Skarmeta. 2018. "Performance Evaluation of LoRa Considering Scenario Conditions" Sensors 18, no. 3: 772. https://doi.org/10.3390/s18030772
APA StyleSanchez-Iborra, R., Sanchez-Gomez, J., Ballesta-Viñas, J., Cano, M. -D., & Skarmeta, A. F. (2018). Performance Evaluation of LoRa Considering Scenario Conditions. Sensors, 18(3), 772. https://doi.org/10.3390/s18030772