Design of Meter-Scale Antenna and Signal Detection System for Underground Magnetic Resonance Sounding in Mines


Abstract
:1. Introduction
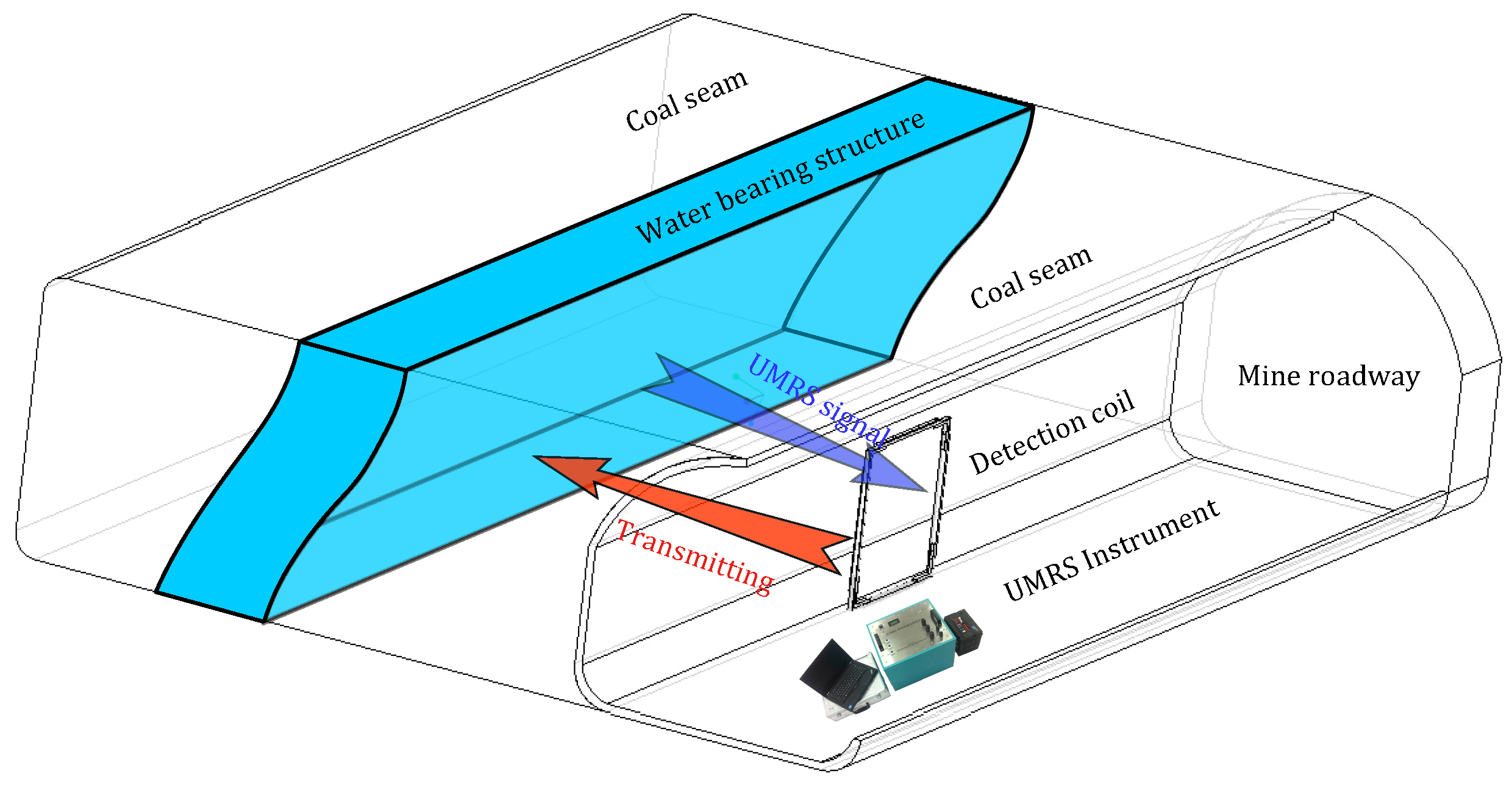
2. UMRS Method
2.1. Basic of UMRS
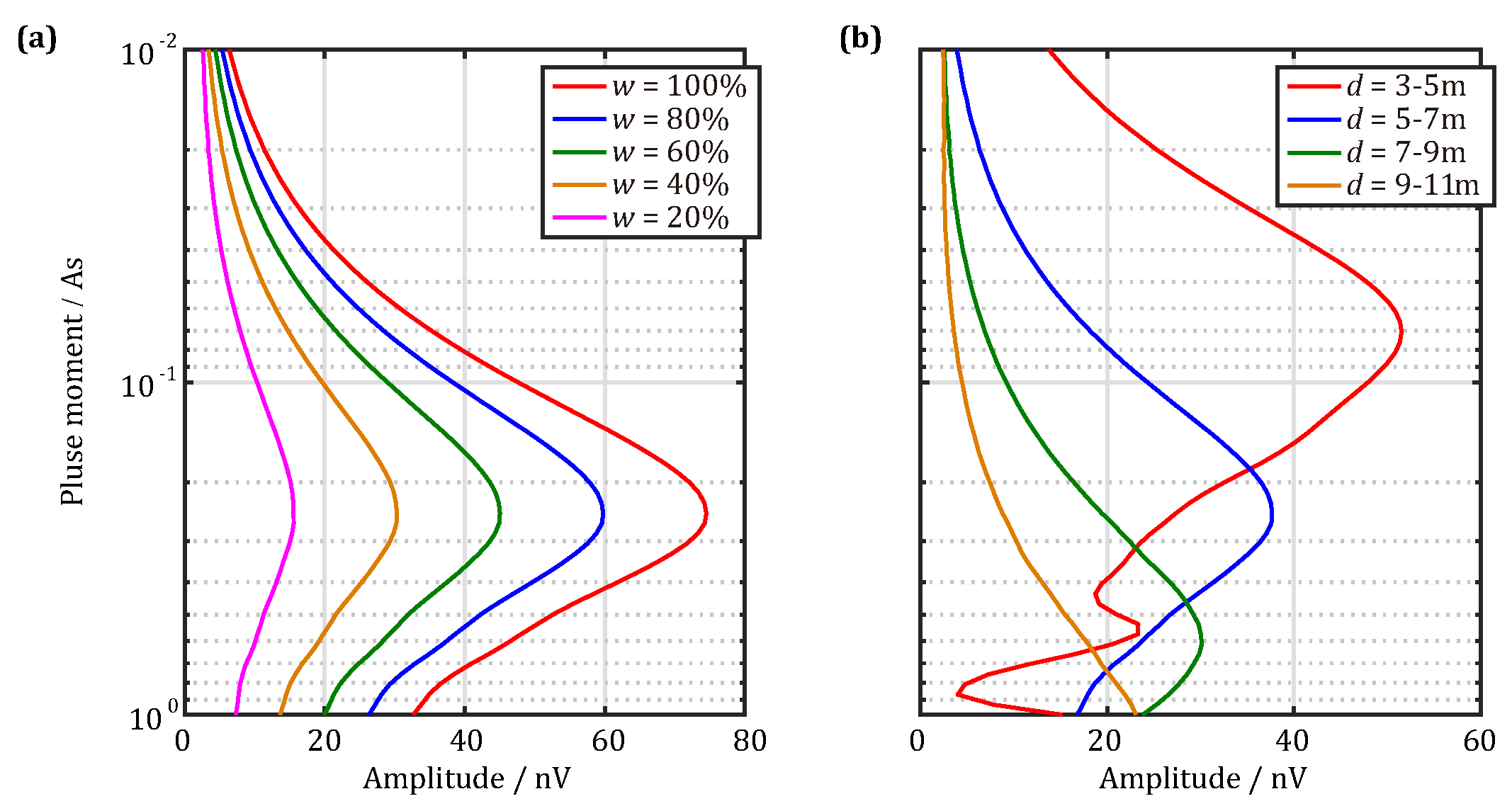
2.2. UMRS Signals
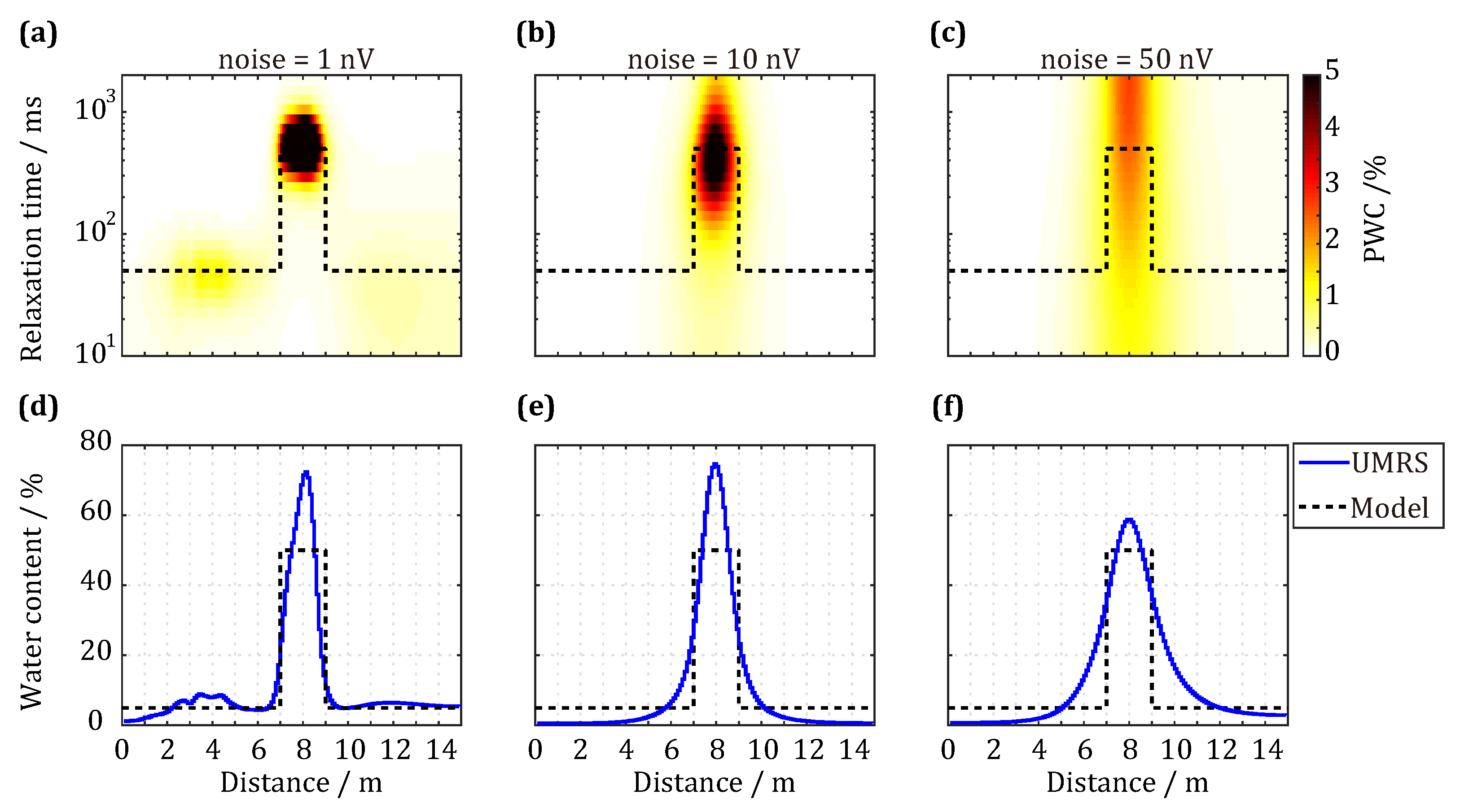
2.3. Inversion Problem
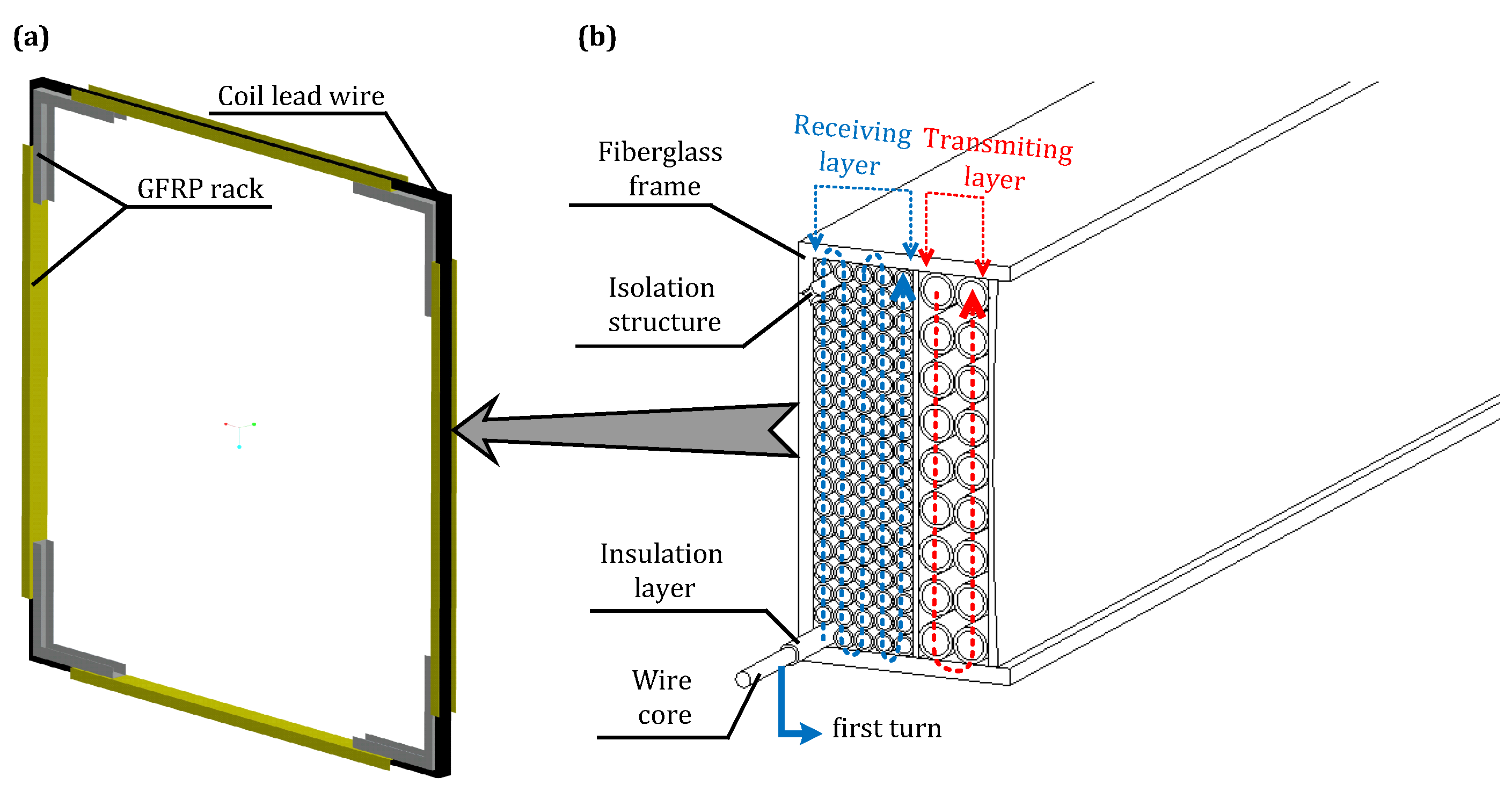
3. Mine Antennae Design
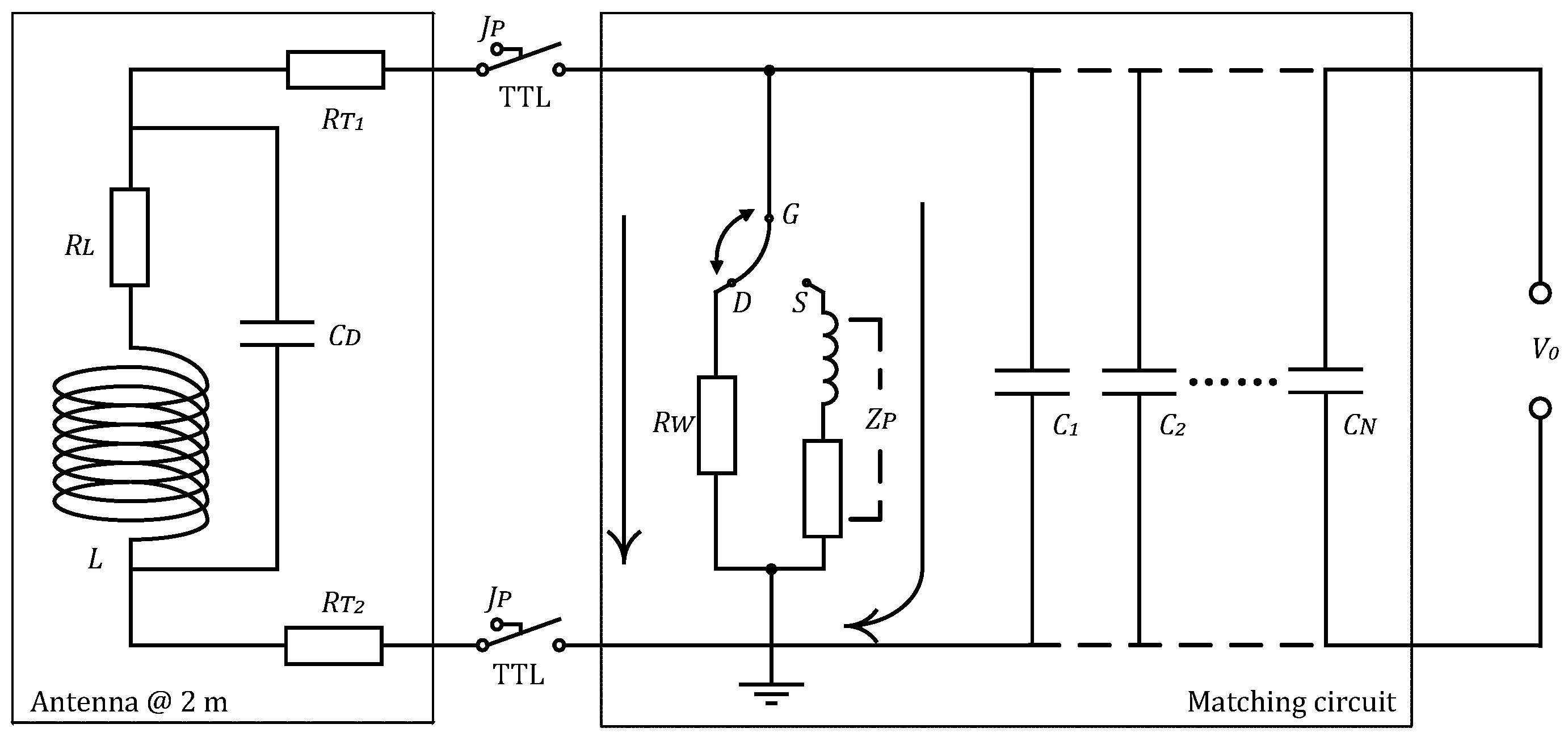
3.1. Antenna Structure
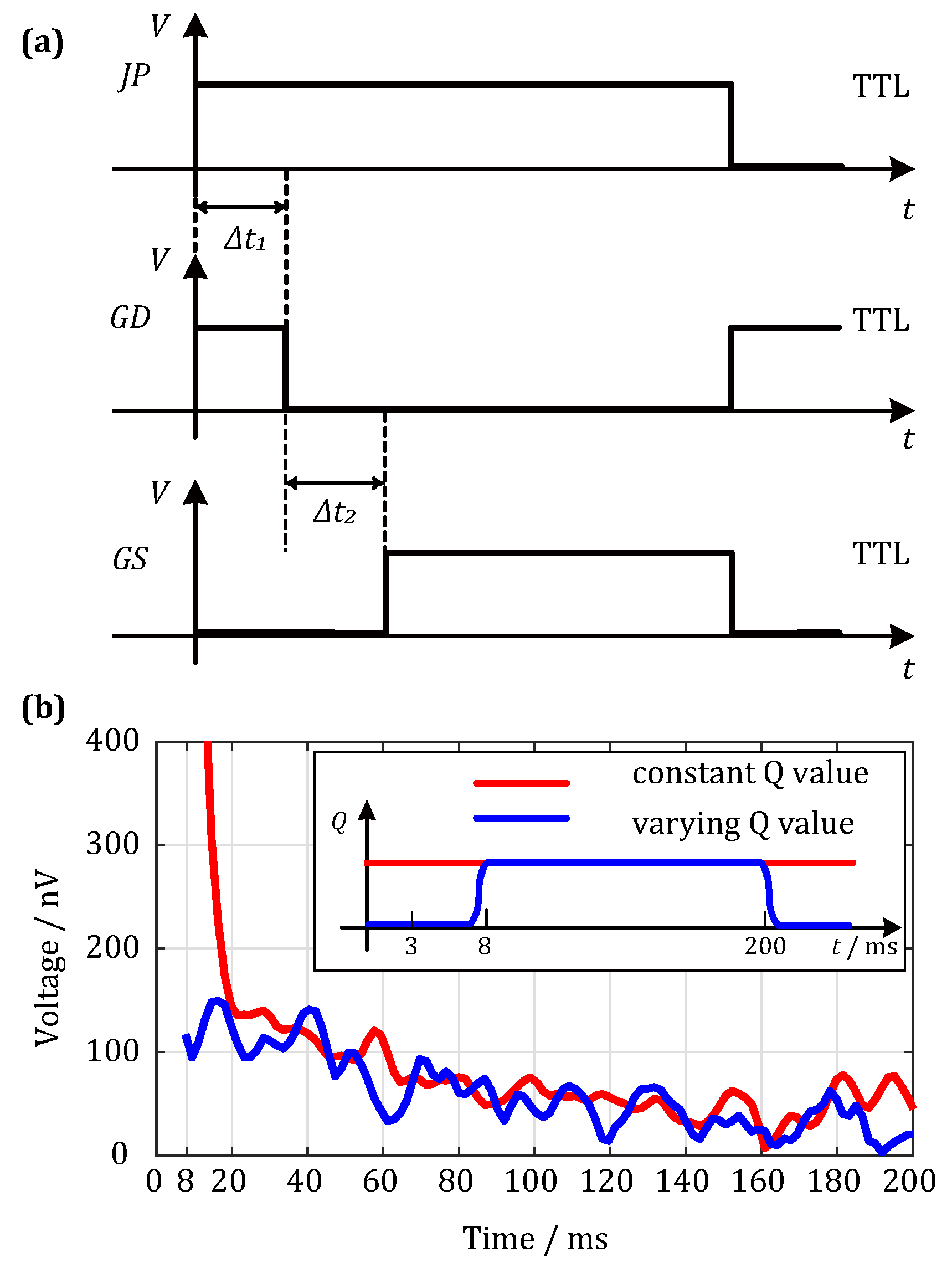
3.2. Matching Circuit
4. Signal Detection System
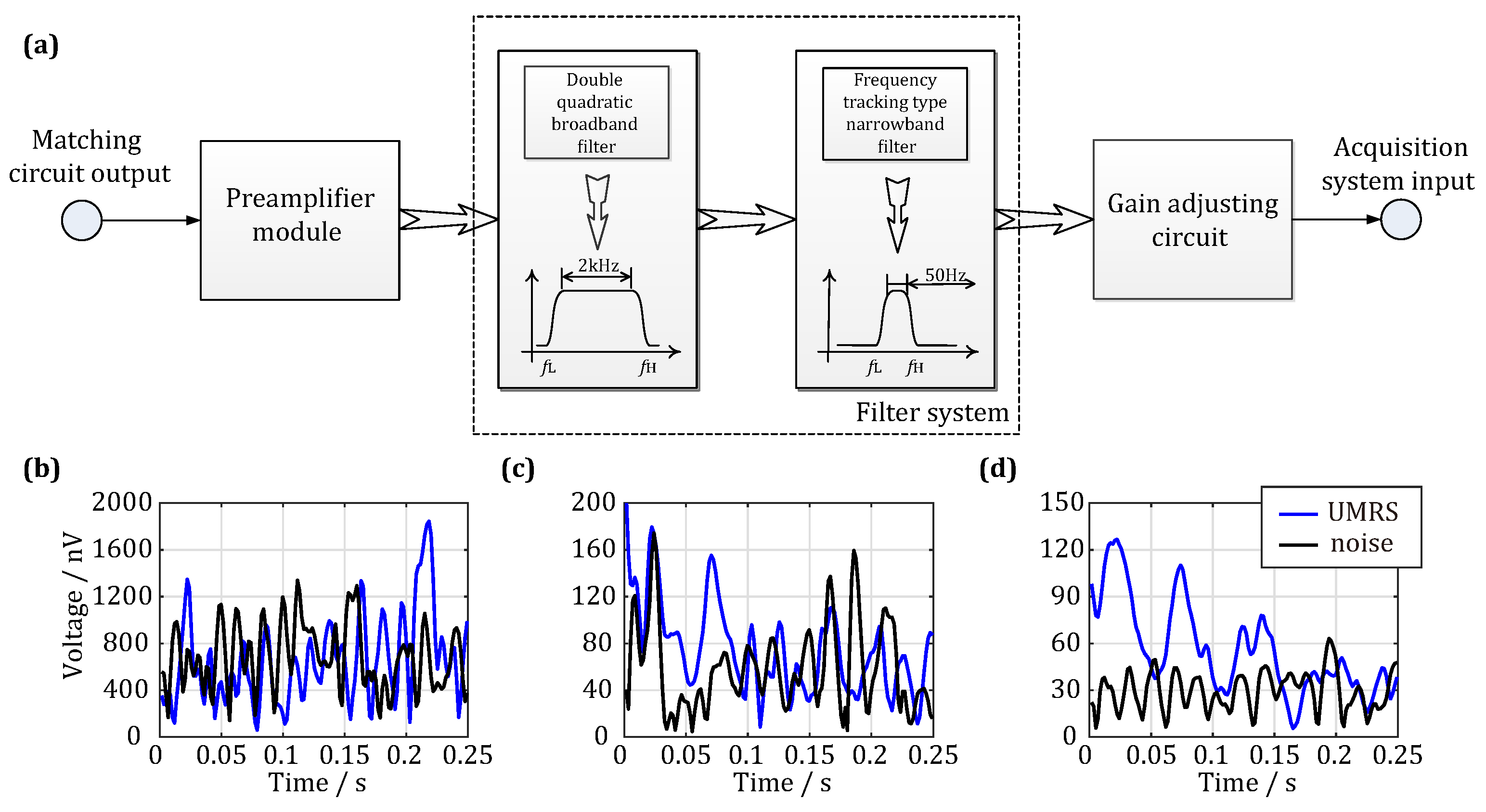
4.1. Hardware Filter Circuit
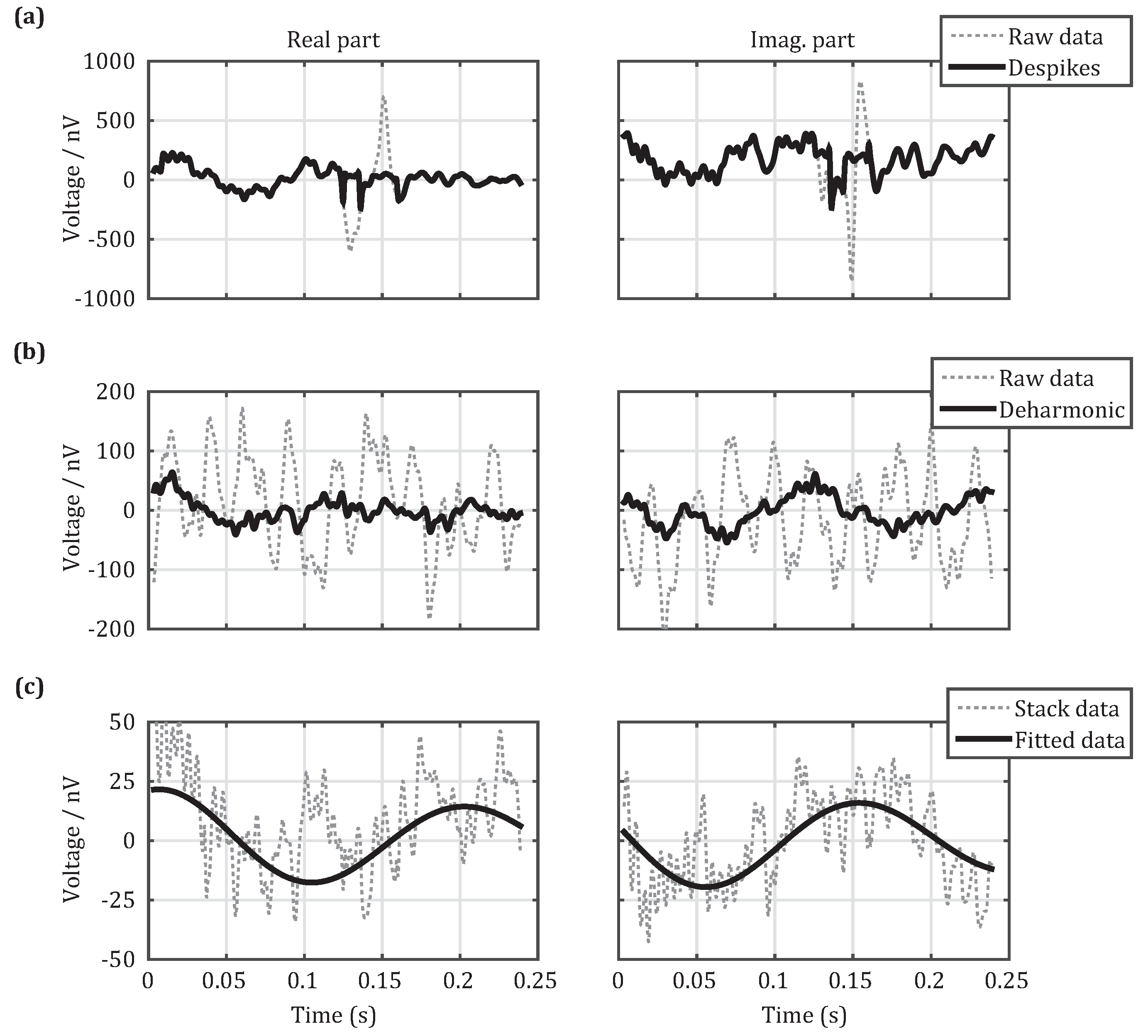
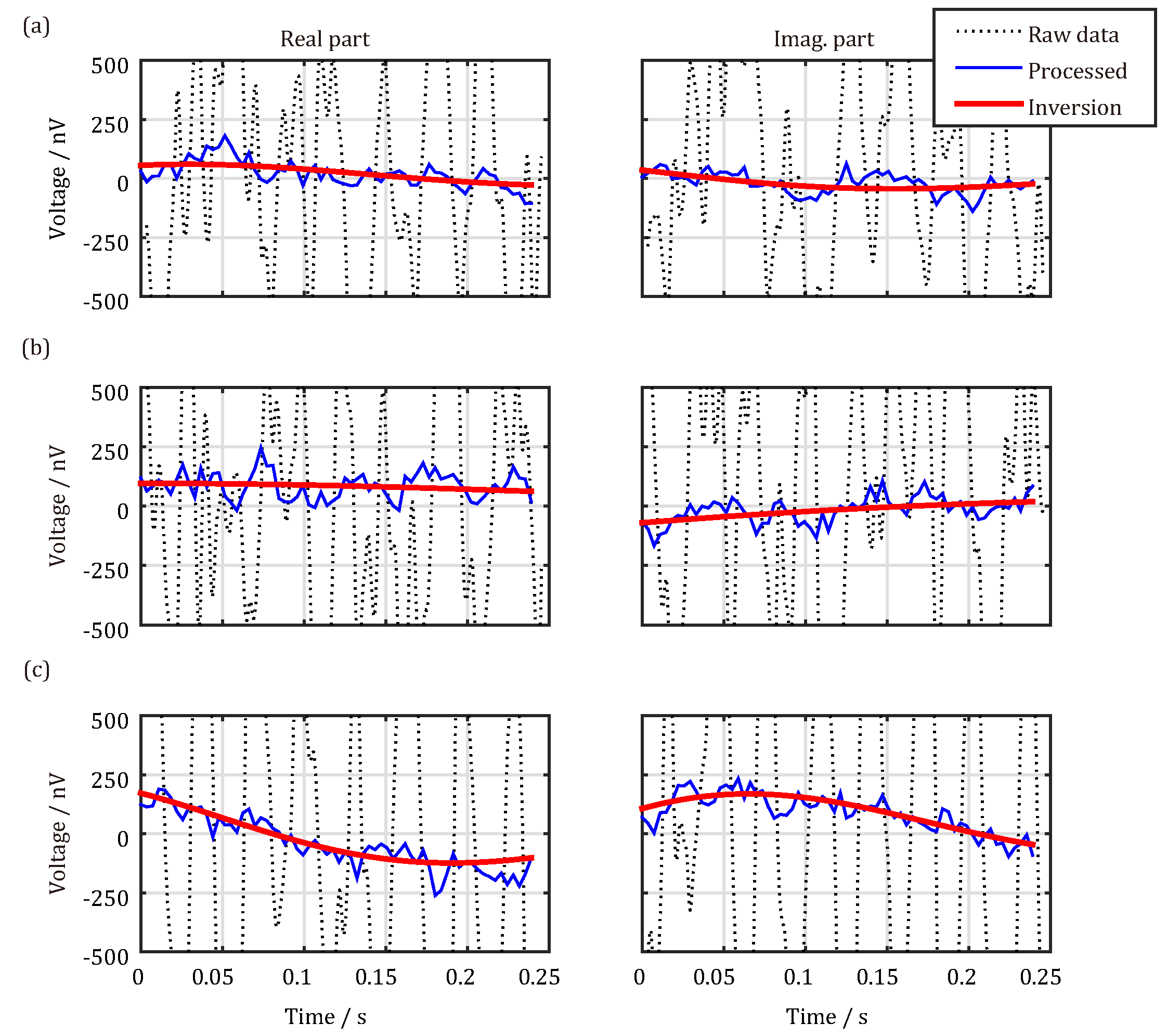
4.2. Software Noise-Cancelling Scheme
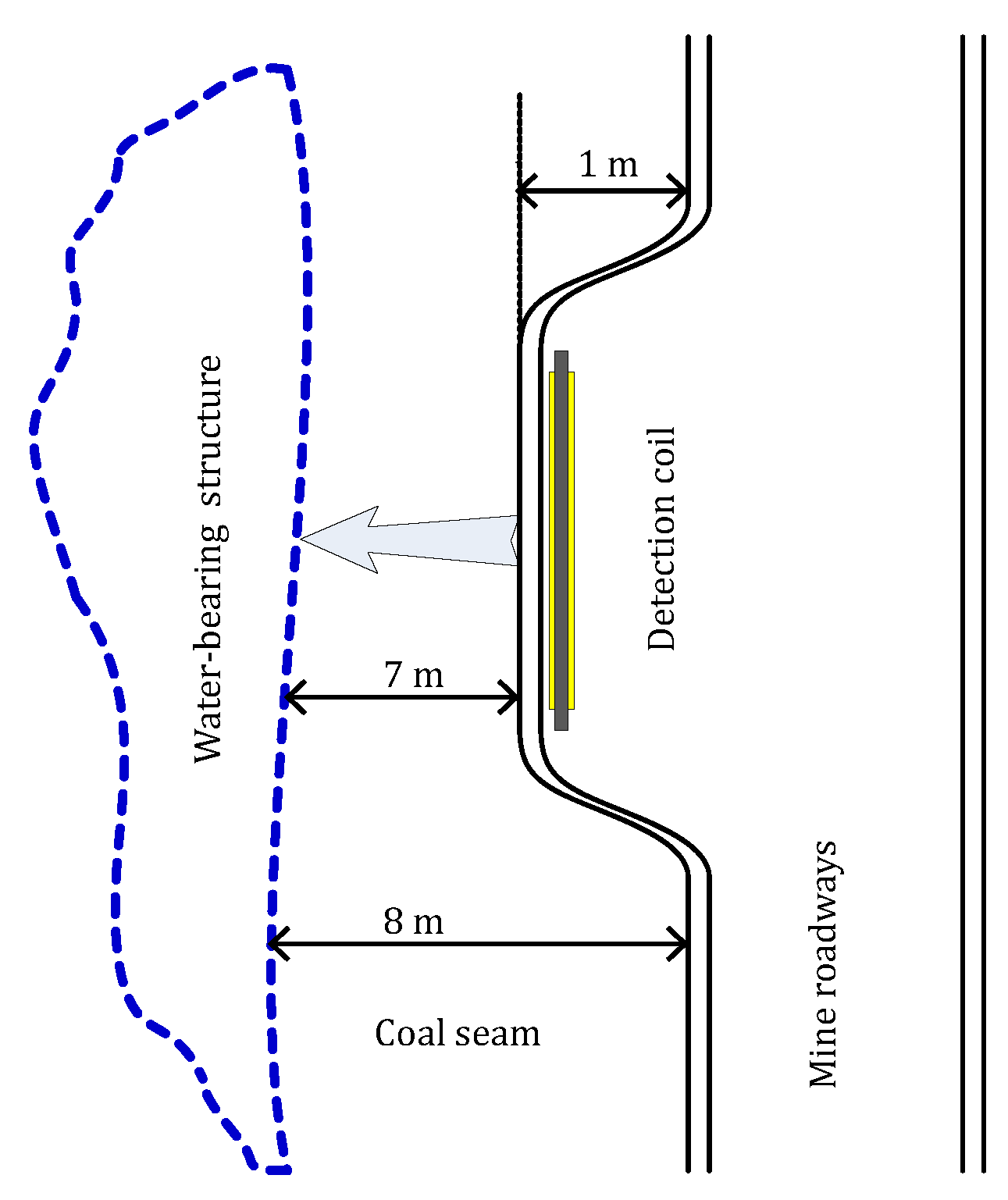
5. Field Case of UMRS Detection
5.1. Environment of the Study Area
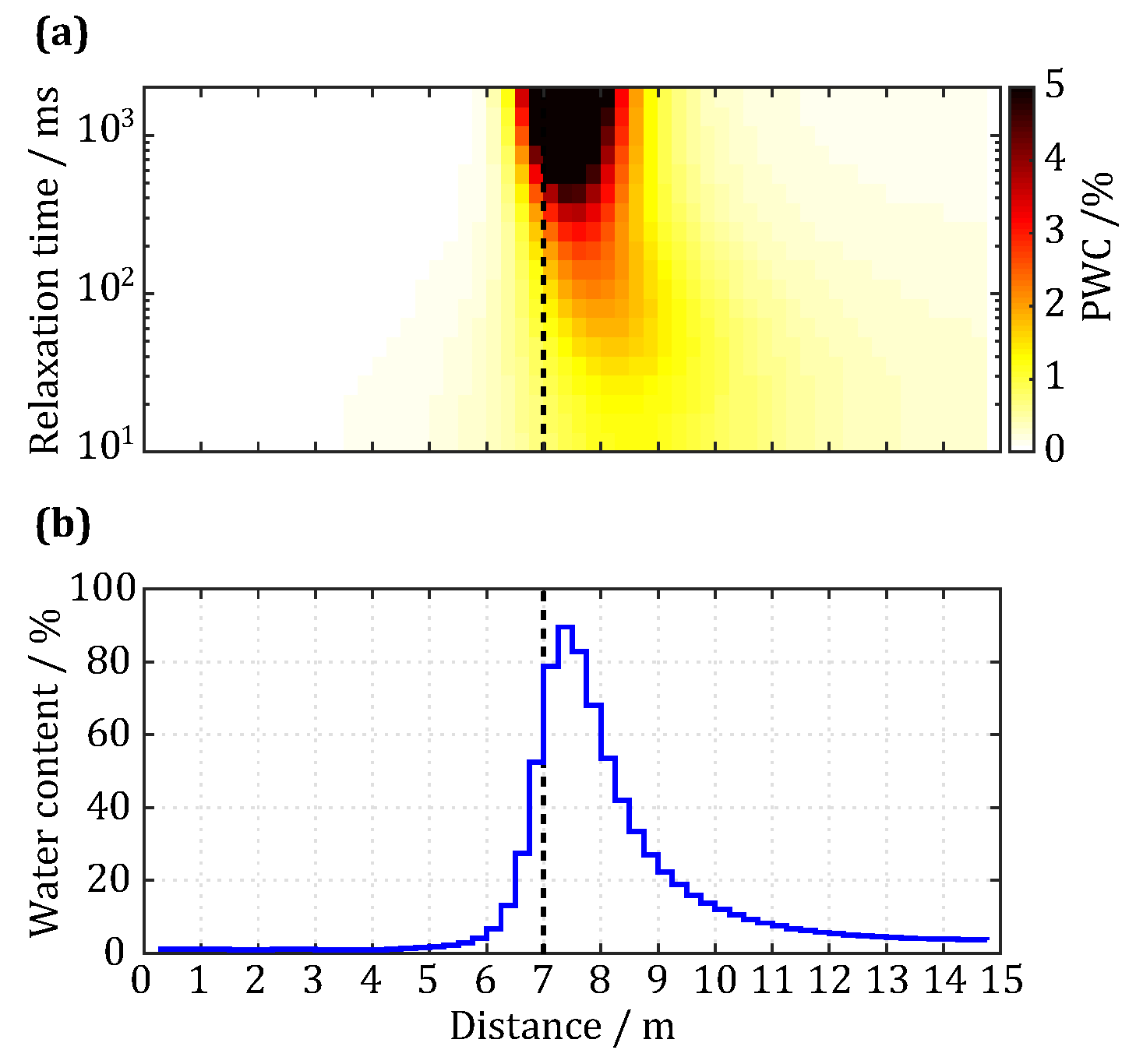
5.2. Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Behroozmand, A.; Keating, K.; Auken, E. A Review of the Principles and Applications of the NMR Technique for Near-Surface Characterization. Surv. Geophys. 2014, 36, 27–85. [Google Scholar] [CrossRef]
- Lin, J.; Jiang, C.D.; Lin, T.T.; Duan, Q.M.; Wang, Y.J.; Shang, X.L.; Fan, T.H.; Sun, S.Q.; Tian, B.F.; Zhao, J. Underground Magnetic Resonance Sounding (UMRS) for detection of disastrous water in mining and tunneling. Chin. J. Geophys. 2013, 56, 3619–3628. [Google Scholar]
- Greben, J.M.; Meyer, R.; Kimmie, Z. The underground application of Magnetic Resonance Soundings. J. Appl. Geophys. 2011, 75, 220–226. [Google Scholar] [CrossRef]
- Radic, T. Improving the Signal-to-Noise Ratio of Surface NMR Data Due to the Remote Reference Technique. In Proceedings of the 12th European Meeting of Environmental and Engineering Geophysics, Helsinki, Finland, 4–6 September 2006. [Google Scholar]
- Lin, J.; Jiang, C.D.; Duan, Q.M.; Wang, Y.J.; Qin, S.W.; Lin, T.T. The situation and progress of magnetic resonance sounding for groundwater investigations and underground applications. J. Jilin Univ. 2012, 42, 1560–1570. [Google Scholar]
- Qin, S.; Ma, Z.; Jiang, C.; Lin, J.; Xue, Y.; Shang, X.; Li, Z. Response Characteristics and Experimental Study of Underground Magnetic Resonance Sounding Using a Small-Coil Sensor. Sensors 2017, 17, 2127. [Google Scholar] [CrossRef] [PubMed]
- Walsh, D.O. Multi-channel surface NMR instrumentation and software for 1D/2D groundwater investigations. J. Appl. Geophys. 2008, 66, 140–150. [Google Scholar] [CrossRef]
- Jiang, C.; Müller-Petke, M.; Lin, J.; Yaramanci, U. Magnetic resonance tomography using elongated transmitter and in-loop receiver arrays for time-efficient 2-D imaging of subsurface aquifer structures. Geophys. J. Int. 2015, 200, 824–836. [Google Scholar] [CrossRef]
- Behroozmand, A.A.; Auken, E.; Fiandaca, G.; Rejkjaer, S. Increasing the resolution and the signal-to-noise ratio of magnetic resonance sounding data using a central loop configuration. Geophys. J. Int. 2016, 205, 243–256. [Google Scholar] [CrossRef]
- Liang, R. Study on Multi-Turn Coil Magnetic Resonance Sounding (MRS) Technique for Underground Water. Ph.D. Thesis, Jilin University, Changchun, China, 2009. [Google Scholar]
- Yi, X.F.; Li, P.F.; Lin, J.; Duan, Q.M.; Jiang, C.D.; Li, T. Simulation and experimental research of MRS response based on multi-turn loop. Chin. J. Geophys. 2013, 56, 2484–2493. [Google Scholar]
- Yi, X. Research and Design of the Main Unit of Portable Magnetic Resonance System for Groundwater Detection. Ph.D. Thesis, Jilin University, Changchun, China, 2014. [Google Scholar]
- Lin, J.; Du, G.; Jian, Z.; Yi, X.; Jiang, C.; Lin, T. Development of a Rigid One-Meter-Side and Cooled Coil Sensor at 77 K for Magnetic Resonance Sounding to Detect Subsurface Water Sources. Sensors 2017, 17, 1362. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Feng, L.B.; Duan, Q.M.; Lin, J.; Yi, X.F.; Jiang, C.D.; Li, S.Y. Research and Realization of Short Dead-Time Surface Nuclear Magnetic Resonance for Groundwater Exploration. IEEE Trans. Instrum. Meas. 2014, 64, 278–287. [Google Scholar]
- Lin, T.; Chen, W.; Du, W.; Zhao, J. Signal acquisition module design for multi-channel surface magnetic resonance sounding system. Rev. Sci. Instrum. 2015, 86, 114702. [Google Scholar] [CrossRef] [PubMed]
- Larsen, J.J.; Dalgaard, E.; Auken, E. Noise cancelling of MRS signals combining model-based removal of powerline harmonics and multichannel Wiener filtering. Geophys. J. Int. 2014, 196, 828–836. [Google Scholar] [CrossRef]
- Wan, L.; Zhang, Y.; Lin, J.; Jiang, C.D.; Lin, T.T. Spikes removal of magnetic resonance sounding data based on energy calculation. Chin. J. Geophys. 2016, 59, 2290–2301. [Google Scholar]
- Jiang, C.; Lin, J.; Duan, Q.; Sun, S.; Tian, B. Statistical stacking and adaptive notch filter to remove high-level electromagnetic noise from MRS measurements. Near Surf. Geophys. 2011, 9, 459–468. [Google Scholar] [CrossRef]
- Callaghan, P.T. Principles of Nuclear Magnetic Resonance Microscopy; Oxford University Press: Oxford, UK, 2007. [Google Scholar]
- Hertrich, M. Imaging of groundwater with nuclear magnetic resonance. Prog. Nucl. Magn. Reson. Spectrosc. 2008, 53, 227–248. [Google Scholar] [CrossRef]
- Weichman, P.B.; Lavely, E.M.; Ritzwoller, M.H. Theory of surface nuclear magnetic resonance with applications to geophysical imaging problems. Phys. Rev. E 2000, 62, 1290–1312. [Google Scholar] [CrossRef]
- Jiang, C.; Müller-Petke, M.; Lin, J.; Yaramanci, U. Imaging shallow three dimensional water-bearing structures using magnetic resonance tomography. J. Appl. Geophys. 2015, 116, 17–27. [Google Scholar] [CrossRef]
- Müller-Petke, M.; Braun, M.; Hertrich, M.; Costabel, S.; Walbrecker, J. MRSmatlab—A software tool for processing, modeling, and inversion of magnetic resonance sounding data. Geophysics 2016, 81, WB9–WB21. [Google Scholar] [CrossRef]
- Behroozmand, A.A.; Auken, E.; Fiandaca, G.; Christiansen, A.V.; Christensen, N.B. Efficient full decay inversion of MRS data with a stretched-exponential approximation of the distribution. Geophys. J. Int. 2012, 190, 900–912. [Google Scholar] [CrossRef]
- Günther, T.; Müller-Petke, M. Hydraulic properties at the North Sea island of Borkum derived from joint inversion of magnetic resonance and electrical resistivity soundings. Hydrol. Earth Syst. Sci. 2012, 16, 3279–3291. [Google Scholar]
- Günther, T.; Rücker, C.; Spitzer, K. Three-dimensional modeling and inversion of dc resistivity data incorporating topography—Part II: Inversion. Geophys. J. Int. 2006, 166, 506–517. [Google Scholar] [CrossRef]
- Parsekian, A.; Grombacher, D. Uncertainty estimates for surface nuclear magnetic resonance water content and relaxation time profiles from bootstrap statistics. J. Appl. Geophys. 2015, 119, 61–70. [Google Scholar] [CrossRef]
- Lin, J.; Zhang, J.; Yi, X. Design and experiment of small antenna for magnetic resonance sounding in underground applications. Chin. J. Geophys. 2017, 60, 4184–4193. [Google Scholar]
- Müller-Petke, M.; Hiller, T.; Herrmann, R.; Yaramanci, U. Reliability and limitations of surface NMR assessed by comparison to borehole NMR. Near Surf. Geophys. 2011, 9, 123–134. [Google Scholar] [CrossRef]
- Legchenko, A.; Valla, P. Processing of surface proton magnetic resonance signals using non-linear fitting. J. Appl. Geophys. 1998, 39, 77–83. [Google Scholar] [CrossRef]
- Walbrecker, J.O.; Hertrich, M.; Green, A.G. Accounting for relaxation processes during the pulse in surface NMR data. Geophysics 2009, 74, G27–G34. [Google Scholar] [CrossRef]
- Dlugosch, R.; Mueller-Petke, M.; Günther, T.; Costabel, S.; Yaramanci, U. Assessment of the potential of a new generation of surface NMR instruments. Near Surf. Geophys. 2011, 9, 89–102. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pulse Moment/As | 0.39 | 0.59 | 0.81 | 1.03 | 1.26 |
| initial amplitude/nV | 66.7 ± 12.1 | 63.5 ± 11.4 | 106.3 ± 13.9 | 210.9 ± 28.5 | 144.8 ± 18.9 |
| relaxation time/ms | 309.6 ± 15.1 | 464.3 ± 32.3 | 497.7 ± 50.5 | 139.7 ± 19.2 | 343.0 ± 9.9 |
| frequency/Hz | 1.6 ± 0.3 | 1.6 ± 0.2 | 1.7 ± 0.2 | 1.8 ± 0.3 | 1.6 ± 0.3 |
| phase/rad | 33.8 ± 10.3 | 37.2 ± 10.3 | 36.1 ± 7.4 | 37.4 ± 6.9 | 32.3 ± 10.9 |
| noise/nV | 41.7 | 41.5 | 52.7 | 77.4 | 47.4 |
| SNR/dB | 9.4 | 8.5 | 14.0 | 20.0 | 22.3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, X.; Zhang, J.; Fan, T.; Tian, B.; Jiang, C. Design of Meter-Scale Antenna and Signal Detection System for Underground Magnetic Resonance Sounding in Mines. Sensors 2018, 18, 848. https://doi.org/10.3390/s18030848
Yi X, Zhang J, Fan T, Tian B, Jiang C. Design of Meter-Scale Antenna and Signal Detection System for Underground Magnetic Resonance Sounding in Mines. Sensors. 2018; 18(3):848. https://doi.org/10.3390/s18030848
Chicago/Turabian StyleYi, Xiaofeng, Jian Zhang, Tiehu Fan, Baofeng Tian, and Chuandong Jiang. 2018. "Design of Meter-Scale Antenna and Signal Detection System for Underground Magnetic Resonance Sounding in Mines" Sensors 18, no. 3: 848. https://doi.org/10.3390/s18030848
APA StyleYi, X., Zhang, J., Fan, T., Tian, B., & Jiang, C. (2018). Design of Meter-Scale Antenna and Signal Detection System for Underground Magnetic Resonance Sounding in Mines. Sensors, 18(3), 848. https://doi.org/10.3390/s18030848