1. Introduction
Human-computer interfaces (HCI) for those with motor deficits based on bioelectrical signals have received increasing attention in the last decade. HCI provides communication and control channels between human subjects and the surrounding environment with the purpose of replacement or augmentation of muscle activity [
1]. Common classes of bio-signals used to control assistive devices include electromyography (EMG) [
2,
3], electroencephalography (EEG) [
4,
5], electrooculography (EOG) [
6,
7], and fusions of these signals [
8,
9,
10,
11].
This work presents the performance results of an HCI system based on electrical currents generated in the contraction and relaxation phase of muscles [
12] known as sEMG. Measurement of sEMG is noninvasive, can offer excellent signal-to-noise ratio compared to EEG, and provides real-time information about muscle intents [
13].
Applications of sEMG include early disease detection [
14], seizure [
15,
16] and fall detection [
10,
17], gesture [
18,
19], and sign language recognition [
3,
20]. These applications recorded activities of facial [
21,
22], upper [
18,
23] and lower-limb [
17,
24] muscles.
The sEMG-based HCIs are sensitive to electronic noise, movement artefacts and muscle fatigue [
12]. To overcome the problem, wearable rigid printed circuit board (PCB)-based systems are often used [
3,
25,
26]. However, these devices still need to be fully fixed and tethered. Another solution is development of wearable and flexible electronics. These sEMG sensors have been utilized to monitor electrocardiogram (ECG), EMG and body posture [
27,
28] signals as well as to detect arm gestures [
29].
The sEMG-based HCIs require effective features to provide real-time efficiency from the data processing standpoint. Time-domain feature extraction is the most common method because these features provide high recognition rate and low computational cost. Root mean square (RMS) [
30,
31,
32,
33] and mean absolute value (MAV) [
29,
33,
34] are most popular among these features. Time-frequency domain features which characterize varying frequency information at different time locations have received attention recently. Time-frequency domain analysis can efficiently eliminate the non-stationary noise in either time or frequency domain [
12,
35,
36,
37,
38].
Feature optimization/selection techniques further enhance the performance. These techniques include filter, wrapper, and embedded methods [
39]. Filter and wrapper methods have very low computational costs because they optimize features independent of the classification performance [
40,
41]. In contrast, embedded methods rely on criteria that are generated during the classifier training process. Examples of embedded techniques are the support vector machine (SVM)-based Recursive Feature Elimination (RFE) [
42] and the linear discriminant analysis (LDA)-based Fisher’s Discriminant (FD) function [
17].
Channel selection is another simple feature selection/optimization technique. Within this method, channel optimization is based on the single-channel classification accuracy. A more sophisticated adaptation is about selecting important muscles/channels that highly contribute to the specific movements according to the power and frequency distribution of sEMG signals [
31].
Classification is the next step to distinguish between different movements. Simple and linear classifiers are preferable because of their simplicity and ease of implementation. For example, Linear Discriminant Analysis (LDA) [
29], k-Nearest Neighbor (kNN) [
3] and Decision Tree (DT) [
3,
13] are feasible to separate small numbers of uncomplicated classes clearly. To increase expandability and performance in complicated systems, Support Vector Machine (SVM) [
43], Artificial Neural Network (ANN) [
44], Fuzzy Min-Max Neural Network (FMMNN) [
40] and Random Forest (RF) [
37] are suggested for classification. Neural Network classifiers can be used for both simple and complex cases due to their high performance. However, with too many hidden layers or hidden units, the classifiers need long training times and require large amounts of training data. Unsupervised learning methods including K-Means and Fuzzy C-Means have also provided high classification performance in sEMG recognition [
32].
An important application of biopotential-based HCI is smart wheelchair control. The conventional paradigm of smart wheelchair control is through joysticks [
45]. This paradigm is not applicable for patients with low or no control of their upper limb. The sEMG-based HCI is an advanced alternative controller [
46,
47], however with more sophisticated implementation than the conventional joystick control. A critical problem is the functionality requirement for accurate control. (1) The recognition for more motions or gestures can increase degree-of-freedom [
37,
42]. (2) A state-machine based control and a proportional control could meet the requirement [
48,
49]. In this method, a modality or a channel is used to switch control modes. (3) Fusion of two or more types of sensors can realize the high-dimensional control for assistive devices. The combination of sEMG and inertial measurement units (IMU) consisted of conventional accelerometers (ACC) and gyroscopes is frequently used because of the high performance in long-term control. Muscle fatigue and skin sweat can make sEMG signals drift, while they have no influence to IMU signals [
50,
51].
In this paper, we explore the performance of sEMG-based HCI in controlling a telecar. We present a wireless wearable sEMG system based on flexible printed circuit (FPC) with embedded dry metallic detecting electrodes that avoids channels connection and fixation challenges. We also present methodology to select sEMG feature subsets for the recognition of four movements. The novel entropy criteria (EC) and Fisher discrimination (FD) criteria are compared with the conventional RFE method. Dunn-Heriksen et al. [
52] introduced EC in EEG channel selection. Here we adopt EC for sEMG feature optimization. Fisher’s discriminant based separability measurement has been widely utilized in feature optimization [
17,
40]. However, we introduce a novel method to compute the ratio of between-class distances to within-class distances. Finally, subjects control a designed telecar based on different paradigms using the optimal channels and features.
The structure of this paper is as follows:
Section 2 describes two types of sEMG acquisition systems. Experimental methods about anticipants, experiment design, sensors placement are discussed in
Section 3. Signal processing techniques including preprocessing, feature extraction, selection, and classification are explained in
Section 4.
Section 5 introduces four different control paradigms, followed by the results of offline analysis and real-time control in
Section 6. Finally,
Section 7 and
Section 8 discuss and conclude with the strengths of the current work.
2. System Architecture
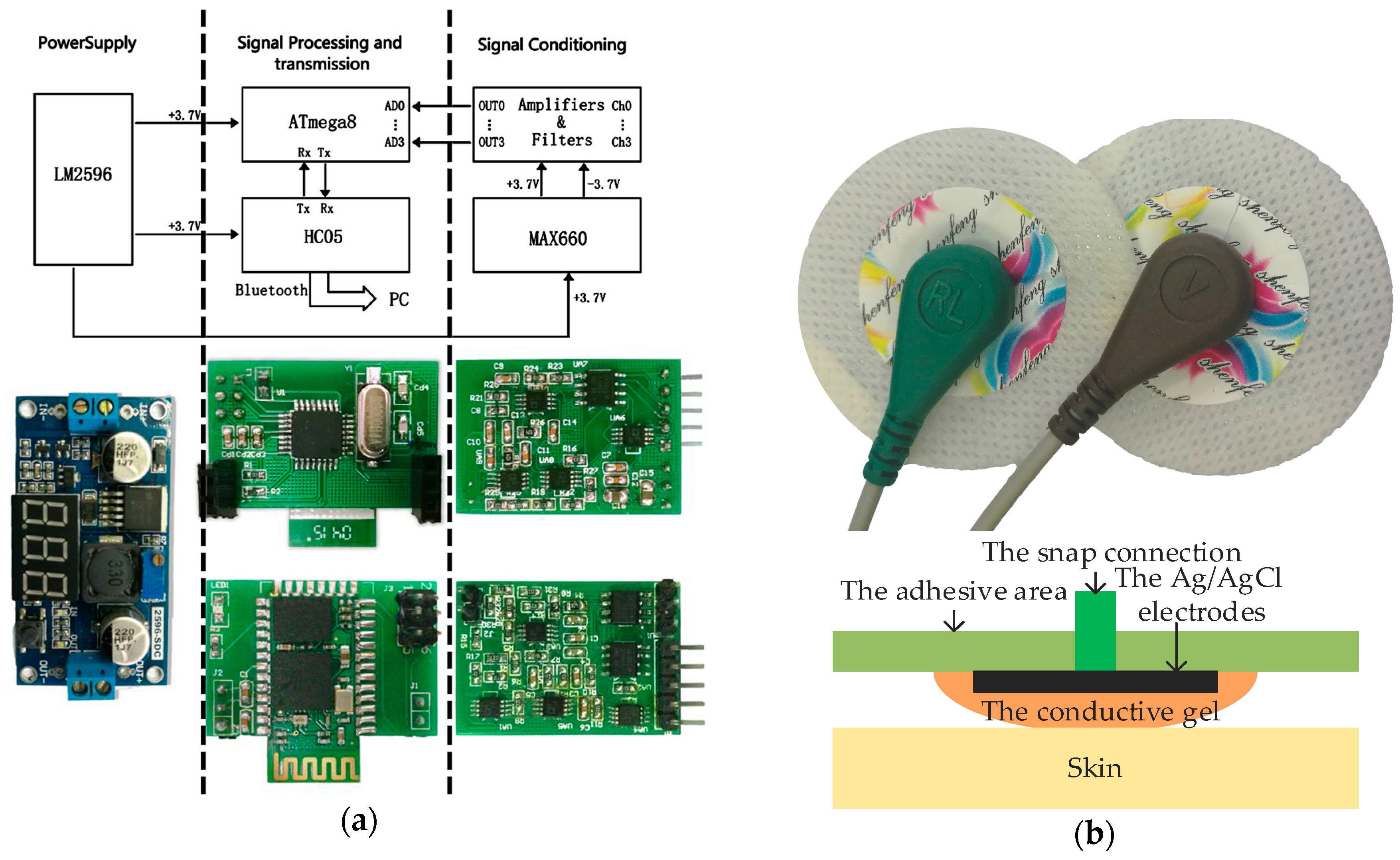
The entire circuit structure of two types of sEMG acquisition systems consists of four main parts: a power module, a signal-conditioning module, a signal-processing module, and a signal-transmission module. The power module provides required power and safety precaution for using in human recordings. The function of signal-conditioning module is to amplify and filter raw signals. Analog filtered sEMG signals are converted into digital signals in the signal-processing module. Finally, the signal-transmission module transmits these digital signals to PC. Our overall hardware design includes the requirements of low cost, low power, small size, human compatibility, and ease of programming and interfacing with standard computers.
2.1. Offline sEMG Acquisition System
We used disposable disc sensors in offline sEMG acquisition, as shown in
Figure 1b. These sensors consist of Ag/AgCl electrodes, conductive gel, an adhesive area and a snap connection. Wet sensors with conductive gel ensure an easy conversion between ionic current and electron current, resulting in low electrode impedance up to few kilo-ohms [
53]. Diameters of the Ag/AgCl electrodes, conductive gel, and disc sensors are 9, 15 and 34 mm, respectively. Two sensors, at a distance of roughly 30 mm, constitute a pair of bi-polar sEMG electrodes.
The sEMG signal has small amplitude and is severely distorted by electromagnetic interference. An approach to reduce the electrode-skin interference is to employ an amplifier with high input impedance. The acquisition system board presented in
Figure 1a (32 × 22 mm
2) includes a high-performance voltage follower (AD8626, Analog Devices, Norwood, MA, USA) as well as a differential amplifier (INA128, TI, Dallas, TX, USA) with very large input impedance. Together they largely reduce common mode interference (CMI) as well as improve the common mode rejection ratio (CMRR) and signal to noise ratio (SNR). We further reduce differential mode interference (DMI) with anti-aliasing and on chip digital filters. In both hardware and software solutions, the high-pass filter may have a 3 dB cutoff frequency of 10–20 Hz and the low-pass filter a 3 dB cutoff frequency of 400–450 Hz to avoid loss of information from the sEMG signals [
54]. Therefore, a pass-band filter between 10 Hz to 450 Hz is designed using the AD8626. The sEMG signals are further passed through a notch filter at 50 Hz (UAF42, TI).
For the signal-processing module, we used an ATmega8 low-power 8-bit microcontroller (ATMEL, Microchip Technology, Chandler, AZ, USA), as the central processor and analog to digital converter. The supply voltage and reference voltage are both 3.7 V. The amplified and filtered signals (in the range of −1.8 V to 1.8 V) are then transformed to unipolar signals in a dynamic range of 3.7 V, sent to the analog-to-digital converter, and finally transmitted to a PC with Bluetooth UART module (HC05). We receive the signals at 1000 Hz sampling rate. They are further filtered (bandpass 10 Hz to 450 Hz as well as notch 50 Hz and its harmonics) and then stored via MATLAB.
The voltage convertor (LM2596, National Semiconductor, Santa Clara, CA, USA) including the thermal shutdown and current limit protection cells can provide the power of +3.7 V efficiently. The CMOS monolithic voltage converter chip (MAX660, Maxim, San Jose, CA, USA) produces a −3.7 V power to supply the negative voltage to dual-supply amplifiers.
2.2. Wearable sEMG Acquisition System
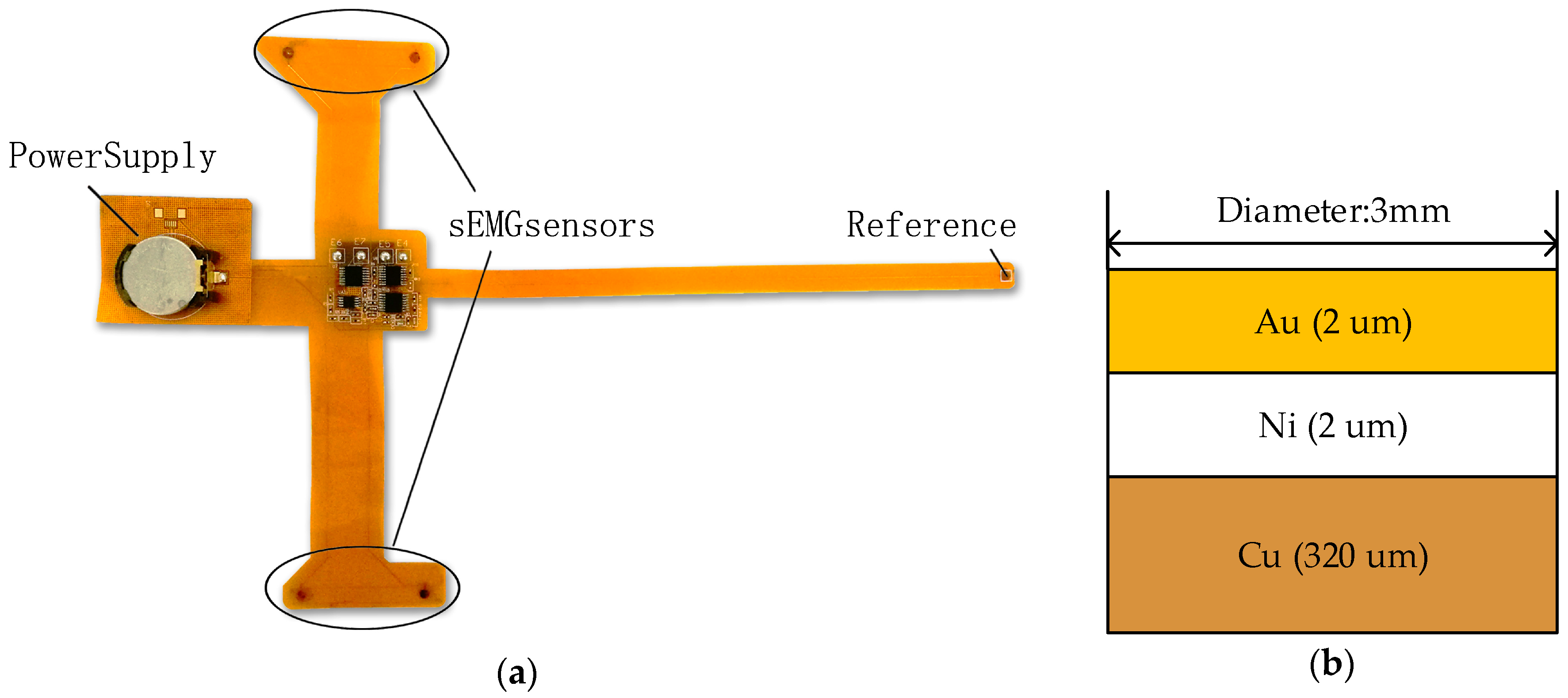
The wearable sEMG acquisition system, shown in
Figure 2a, is almost same as the offline system, with small differences. First, the FPC-based real-time system is more flexible, small-sized, lightweight, and low-cost compared to the PCB-based system. Therefore, this design minimizes noise pickup in sEMG recording stations, and allows for recording without additional pre-amplification steps.
Second, in term of sensors materials, we designed two pairs of metallic dry sensors. This type of disc sensors is plated with copper on the top layer of FPC-based board. The next step is plating nickel and gold on the copper disc to stabilize contact impedance as shown in
Figure 2b. Low electrode-skin impedance is critical for recording high-quality signals. The traditional solution is to gently exfoliate skin using abrasive gel or 75% alcohol. The diameter of each sensor is 3 mm and the fixed distance within a pair of sensors is 30 mm. The inter-electrode distance can be minimized further due to the smaller size of electrodes. Therefore, metallic dry sensors can fit an uneven skin for more precise applications.
Thirdly, the optimization of circuit structures is considered to satisfy demands of miniaturization and high-reliability for systems. The contact-impedance problem is a much more pressing problem for dry sensors compared with wet sensors [
55]. Except for cleaning skins, another practice is to employ an amplifier with high input impedance. Therefore, we replaced the amplifier INA128 with a higher performance instrumentation amplifier INA2126 (TI). In order to minimize the system size, we replaced the AD8626 amplifier with a TLV4333 (TI). The TLV4333 contains a four-channel amplifier with an input filter to reduce both common mode interference (CMI) and differential mode interference (DMI). To combine the signal-processing and signal-transmission modules, the nRF51822 (Nordic, Oslo, Norway) is used as central processors because it integrates Cortex-M0 kernel, analog to digital converter (ADC), and Bluetooth 4.0 module. We used a 3 V button battery to power the real-time system.
Finally, wearable online systems are paired with a personal computer which performs more computationally intensive processing steps. These include independent component analysis (ICA), multiscale principle component analysis (MSPCA), specified features calculation, and prediction based on the trained model.
4. Signal Processing and Pattern Recognition
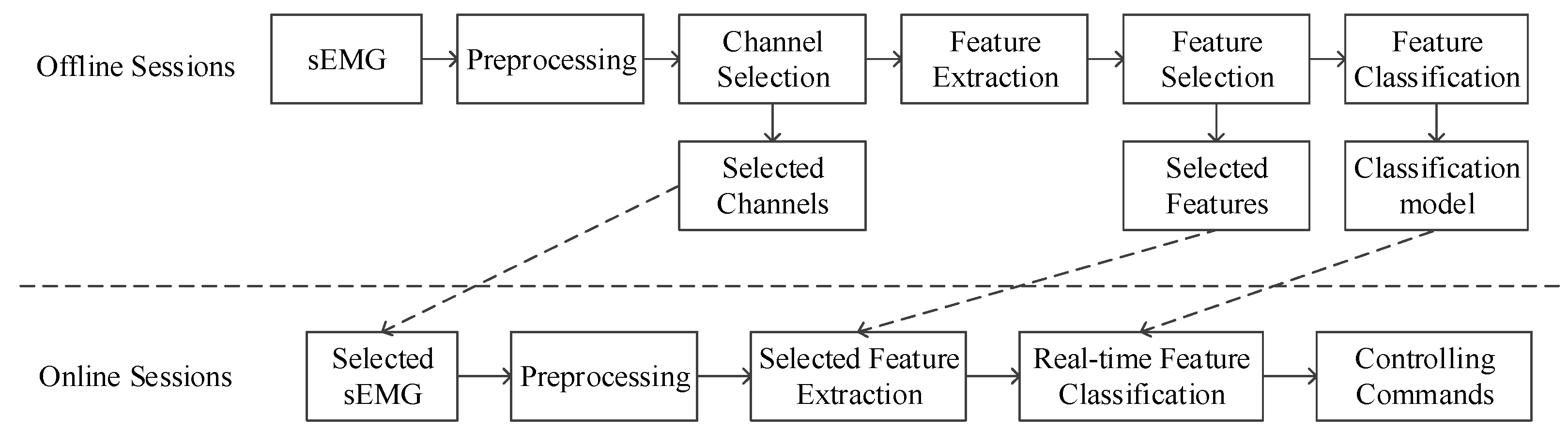
All data processing was performed within MATLAB. The steps of signal analysis and the relationship between offline and online sessions are illustrated in the flowchart of
Figure 4. In the offline phase, we used infinite impulse response (IIR) filters, ICA and MSPCA to de-noise sEMG signals. The feature extraction module includes time-domain, frequency-domain, and time-frequency-domain features computation. Feature selection refers to separability. The rank of single-channel accuracies selected optimal channels, and the EC and FD methods determined a uniform subset of features. Four machine learning algorithms (kNN, ANN, RF and SVM) were employed to classify features, and the best parameters and model were saved. In online sessions, same preprocessing approaches except a different segmentation method were adopted for signals from the selected channels. We then extracted the optimal feature subset according to offline sessions and utilized a classifier model to specify the control commands during online sessions.
4.1. Preprocessing
4.1.1. Data Filtering and Segmentation
We employed an IIR Butterworth bandpass filter (10–450 Hz, with order 16) according to the previous works [
54,
56]. An elliptic notch filter and several bandstop filters were used to eliminate the power line interference at 50 Hz and its harmonics. There are two main sEMG segmentation methods: disjoint and overlapped methods [
57]. In offline sessions, subjects maintained each motion in a 1.5-s task time, which had precise onset and offset boundaries. The task period was further divided into 3 periods—a transient period of onset (0–0.25 s); a one-second execution period (0.25–1.25 s); and another transient period. Feature values were extracted only from the one-second execution window segmented by the disjoint method with a predefined length. For example, four feature vectors could be extracted from the execution period with a 250 ms analysis window. Real-time analysis adopted the overlapped segmentation method. The size of sliding window was predefined with 20% overlap.
4.1.2. Independent Component Analysis (ICA)
Subsequently, remaining artifact signals could be removed conveniently by applying ICA. For the general ICA model of sEMG, suppose we have
N channels filtered sEMG signals
xi,
i = 1, …,
N. Each channel has
N independent source signals
si,
i = 1, …,
N and records different mixture of
si. Mathematically, the principle of mixing processes can be expressed as follows:
where
A is the unknown mixing matrix,
x and
s represent the combination of
xi and
si respectively. Then, the algorithm extracts a matrix with independent components (ICs) that recovers original sEMG signals when applied to the data set
x according to:
where
W called unmixing matrix equals
A−1, and
u denotes the sources (ICs). After performing an ICA, clean sEMG signals used in future processing are obtained by removing the ICs with artifacts and neglecting the corresponding column of
W.
4.1.3. Multiscale Principle Component Analysis (MSPCA)
The MSPCA algorithm was proposed by Bakshi [
58] to merge the strengths of PCA with the benefits of the wavelet transform (WT). While PCA extracts the linear or nonlinear relationships among variables, WT extracts deterministic features and approximately removes the autocorrelation within measurements [
59].
MSPCA has been applied for EMG [
36] and ECG [
60] signal modeling and de-noising. In terms of sEMG signals, the algorithm steps are: (1) The
j-th column
of raw data are decomposed to its wavelet coefficients by WT. (2) The covariance matrix of each scale is computed along with the number of principle components separately from other scales. (3) The appropriate number of principle components is selected. (4) The combination of WT and PCA is used to reconstruct the de-noised signals.
4.2. Feature Extraction
Three main types of features—time, frequency and hybrid domains—have been used to classify sEMG signals for HCI [
61]. These features are computed based on signals’ amplitudes (time domain), estimated power spectrum density (frequency domain) and time-frequency transformation (hybrid domain). The time domain features are most popular because of their computational simplicity. Time-domain features include mean absolute value, modified mean absolute value with the weighting window function (function (1)) and the improved weighting window function (function (2)), root mean square, variance, waveform length, Willison amplitudes, simple square integral, zero crossing, slope sign change, and histogram of sEMG. Frequency-domain features are mostly used to study muscle fatigue and to recognize movements. Widely used frequency-domain features include auto-regressive coefficients, median and mean frequencies.
Time-frequency analysis, with its ability to represent time dependent frequency responses, has recently leveraged in the sEMG feature extraction. The most commonly used analysis method is discrete wavelet transform (DWT). We use the Daubechies 4 (DB4) wavelet because of higher classification accuracy and lower computation cost [
62]. Average power of wavelet coefficients in each sub-band are extracted for evaluation of the frequency distribution. We also compute standard deviation of coefficients to evaluate changes in the distribution. Another time-frequency feature is power spectral density (PSD) of short time window Fourier transform.
Table 1 lists features used in this study, their abbreviation and dimensions. In offline sessions, all 42 listed features were extracted for each channel. These features were then cascaded into a final vector with a dimension of 168 for four channels.
4.3. Feature Selection
The dimension of features extracted in the last section should be reduced before sending them to classifiers. Efficient feature and channel selection algorithms improve the prediction performance and provide less computational complexity. The common approach to evaluate selected features is estimating the rank of classification rate or the separability criteria [
63].
Here, the optimal-feature selection combined the rank of separability values (SV) of each feature with classification rates by SVM. First, we obtained a feature subset with the highest accuracy for individual channel. The mean number of optimal feature subsets across all channels and subjects represented the size of features in real-time algorithms. Next step was to confirm the detailed common features. We calculated the summation of each feature’s SV via EC and FD methods. We then used the RFE method to compute and rank the frequency each feature was contained in optimal subsets. The selected features were determined by specific criteria according to these different methods. Ideally, different algorithms should obtain almost same optimal feature subsets.
4.3.1. Entropy Criterion Based Feature Selection (EC)
A modified entropy based method is used to calculate separability values. The variance of features among different classes can provide classification information, and the entropy of features’ variance is a measurement of uncertainty. When the variance of different classes is close, it means that the specific class has little classification information and vice versa. Therefore, the entropy of variance measures separability of each feature. The definition is as follows:
where
Ji denotes SV of the
i-th feature, and
denotes normalized variance of the
i-th feature for the
k-th class (totally
n class). Within this method, smaller
Ji corresponds to the feature with larger variance entropy.
4.3.2. Fisher Discrimination Based Feature Selection (FD)
The ratio of between-class and within-class distance could evaluate the extracted features’ separability numerically. The principle of this method is similar with the Fisher linear discriminant analysis (LDA) algorithm [
64]. The SV is calculated by:
where
ai and
bi denote the
i-th feature in class
a and
b respectively, and the function D
2(
a,
b) is the mean Euclidean distance between all combination of different trials of two groups. The separability improves when the ratio increases. In multi-class (totally
n class) separability analysis, we separate the problem into
n two-class problems according to one-versus-all strategy [
65]. The average ratio of these two-class problems is computed as the multi-class SV for each feature.
4.3.3. Recursive Feature Elimination (RFE)
Compared with the mentioned methods offering the numerical evaluation of features, the RFE algorithm based on SVM outputs a list of ranked features. In detail, the RFE algorithm mainly contains following steps [
66]. (1) Features and class labels are combined. (2) Training the model of SVM. (3) Computing the weight vector and rank criteria. (4) The feature with the smallest rank criteria is eliminated. (5) Steps (2)–(4) are repeated until only one feature is left. Finally, the algorithm outputs the feature rank list. The rank criteria is the squared coefficients
w2 [
67]. Importance of a feature is determined by the loss of the margin between classification boundaries when the feature is removed. The rank criteria is defined as:
where
w is the inverse of margins which means
, and
w(−i) represents the
w without the
i-th feature at this SVM iteration.
4.4. Classification
Although we quantify the separability of various sEMG features, it is still unclear whether they interact well with the classification process. Therefore, it is important to choose the best classifier for recognizing sEMG patterns. Here, four widely-used classifiers—kNN, ANN, RF and SVM—were Considered. We optimized classification parameters based on offline data (train) and then applied the optimal classifier to real-time data (test).
4.4.1. k-Nearest Neighbor (kNN)
The kNN is one of the simplest learning methods that divides data into two or more classes. The kNN is frequently used for small training datasets, because it is easy to implement and has low computational cost. Inputs consist of the
k closest training samples in the feature space. In the sEMG classification, the distance of
k nearest neighbors from one another determines the label of test samples. Performance of the kNN depends on the selection of parameter
k. Wan et al. tested the relationship between
k and ten-fold CV accuracy [
68]. When
k is in the range of 3 to 10, the difference of accuracy is not huge. In this work, six nearest neighbors were selected to evaluate accuracies.
4.4.2. Artificial Neural Network (ANN)
The ANN follows a learning method with self-learning capability [
69]. However, because the network contains numerous parameters its training process is time-consuming. These parameters including thresholds of hidden layers and connection weights between layers. In the classification of four-motion sEMG signals, the ANN structure consisted of one input layer, one hidden layer and one output layer. The dimension of input feature vectors was
n. The neurons of input, hidden and output layers were
n, 2
n and 4, respectively. The activation function was a sigmoid. We estimated parameters by the back-propagation algorithm to reduce the cost function and gradient [
70]. Because of long training time, we used a five-fold CV to validate classification of sEMG data.
4.4.3. Random Forest (RF)
The RF is a type of ensemble learning method. Although the design and computation are easy, it works better than other high-performance classifiers, such as SVM and ANN, in some applications [
71]. In order to ensure performance of the RF, each base learner should have high precision. Simultaneously, to improve generalization ability of the RF, the diversity of base learners is guaranteed by two methods. The first method is to sample training data randomly as the input of each base learner. The second method is to choose the best decision feature from a subset of features (dimension:
s) instead of from all features (dimension:
d) for each node. The output is a final class voted by all base learners. In this study, the optimum number of base decision tree was 30 according to the research results of Gokgoz and Subasi [
12]. The optimal feature subsets for nodes were determined as follows [
72]:
4.4.4. Support Vector Machine (SVM)
The SVM has high speed in calibration and classification of high dimensional sEMG features. The goal of this algorithm is to solve classification problem by finding maximal margin hyper-plane (
w,b) to separate training data with a given set of labels. Briefly, a positive real constant
is computed by training data to determine parameters
w and
b. When using the test feature
f, a label is assigned according to the decision boundary function, which is:
where
fj denotes the
j-th trial (totally
m trials) in training data with a corresponding label
yj, and K is a kernel function including a high dimensional model. In this work, we chose the radial basis kernel function in LIBSVM [
73]. Despite more than two movements present, the binary SVM was still used with one-versus-all technique. In offline sessions, ten-fold cross validation (CV) was used to assess classification accuracies and F-score.
5. Control Methods
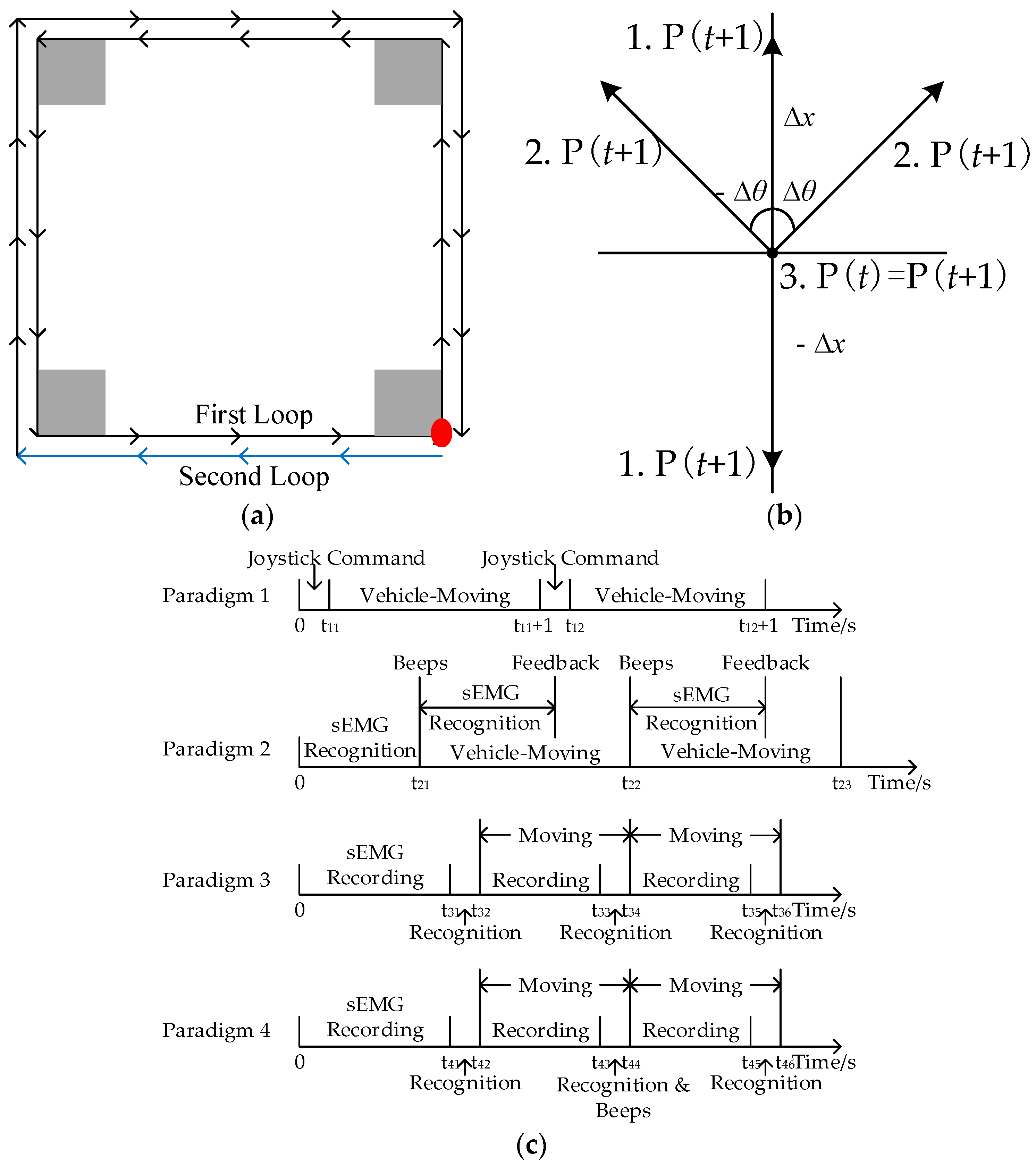
Subjects can control a wheelchair—the final aim of sEMG-based HCIs—only when they achieve high performance in the telecar control with a pre-defined path. In real-time sessions, subjects controlled the designed toy vehicle with the wearable sEMG system to finish two loops in a square-loop environment with some simple obstacles. The length of each side was 40 cm. The vehicle was randomly positioned at any corner after the obstacle localization was completed. The moving and rotating speeds are set to a constant value of 12 cm/s and
rad/s, respectively.
Figure 5a shows an ideal route to finish the loops and simple obstacle map. The differential distance of two loops in the figure is only for clear visualization.
This section introduced four control methods. The response time of a real-time system should not introduce a delay that was perceivable by users, and the threshold was generally regarded to be roughly 300 ms [
74]. Therefore, the real-time control in this work adopted a 125 ms window. There are two controlling rules: First, only one motion was classified at a time during the implementation. Second, in Paradigm 2, the classification result of newly acquired sEMG features combined with the last motion to confirm whether two consecutive windows were same. The protocol for each paradigm is shown in
Figure 5c, and introduced as follows:
Paradigm 1: The vehicle moved to a direction according to the joystick command. The maneuverability is best for healthy subjects.
Paradigm 2: Considering safety and a continuous control, the fixed-moving paradigm was introduced. In this paradigm, the next motion was determined during vehicle moving. Once the vehicle moved, subjects were prompted to start a motion with an auditory signal (beeps). After our system identified the motion, subjects received another auditory feedback and prepared for the next move. The epoch of sEMG data processing was 125 ms, and the same results of two consecutive epochs were considered as a valid control command. The HCI system would translate predicted classes into corresponding actions as described in
Table 2. Suppose
P(
t) is the location at the time window
t, and ∆
x and ∆
θ denote the position change in straight-line and veer directions. Then, the position at the next time window
t + 1 could be updated as:
The equation reveals that the position at
t + 1 has three possibilities as shown in
Figure 5b: (1) Fixed ∆
x determines the vehicle moves forward or backward by 12 cm. (2) Fixed ∆
θ influences veer movements, which means the vehicle rotates 45 degrees clockwise or anti-clockwise. (3) If there is no movement commands, the vehicle waits and then stops.
Because of the high separability of sEMG signals among different movements as well as the efficient auditory cues and feedbacks, this paradigm had a high degree of maneuverability in continuous HCIs.
Paradigm 3: Although the second paradigm has a good performance, some problems still exist. The main problem is about fixed moving periods, which leads to challenges for paths that frequently change directions. Another problem is that when no continuous same results come, the delay may still exists.
To overcome these problems, we proposed the channel-combination paradigm with 125 ms window. The same results from both selected channels determined moving directions during recognition periods (i.e., t
31–t
32, t
33–t
34 and t
35–t
36 in the figure).
Table 3 shows control methods in this paradigm. The sEMG recording for the next process was synchronous with the vehicle moved. For example, the recording time was from t
32 to t
33 and the vehicle-moving period was from t
32 to t
34. The respond time is short in this paradigm, but subjects could not stop by their autonomous motions in the four-state control, which is a hidden danger for patients.
Paradigm 4: The state-machine-based control paradigm could increase the functionality [
48]. Five-dimension control could be achieved by four motions in this paradigm as shown in
Table 4. The REST state was a switching of straight-line and rotational movements. The protocol was similar with Paradigm 3 in
Figure 5c. The initial state was straight-line movements, and the detailed control method was as following. Recognition results from t
41–t
42 determined moving states in t
42–t
44. Upon the REST state appeared (e.g., the period of t
43–t
44), an auditory beeps was offered and the mode was switched to rotational movements. Consequently, another REST state set back the mode to straight-line state. A critical control rule was the mode could not be changed unless at least one motion was implemented. Subjects can stop control by keeping fisting.
6. Results
Our objective is to choose and use effective features for the sEMG-controlled vehicle with wearable HCI designed by our group. We present four steps: first, we validate the feasibility and performance of our proposed hardware and filters. Second, the rank of classification accuracy picks two channels. Thirdly, optimal feature subsets and multi-class recognition rates are computed by the proposed feature selection algorithms, and compared with the RFE method. Finally, we generalize findings through comparing different control paradigms, and investigate whether the selected common channels and features are applicable to online sessions.
6.1. Acquisition System Testing
Tests of this part are to verify the feasibility of acquisition systems and preprocessing methods. The results show that real-time high-quality signals can be transmitted to computers and saved within the Bluetooth communication distance.
6.1.1. Hardware Evaluation
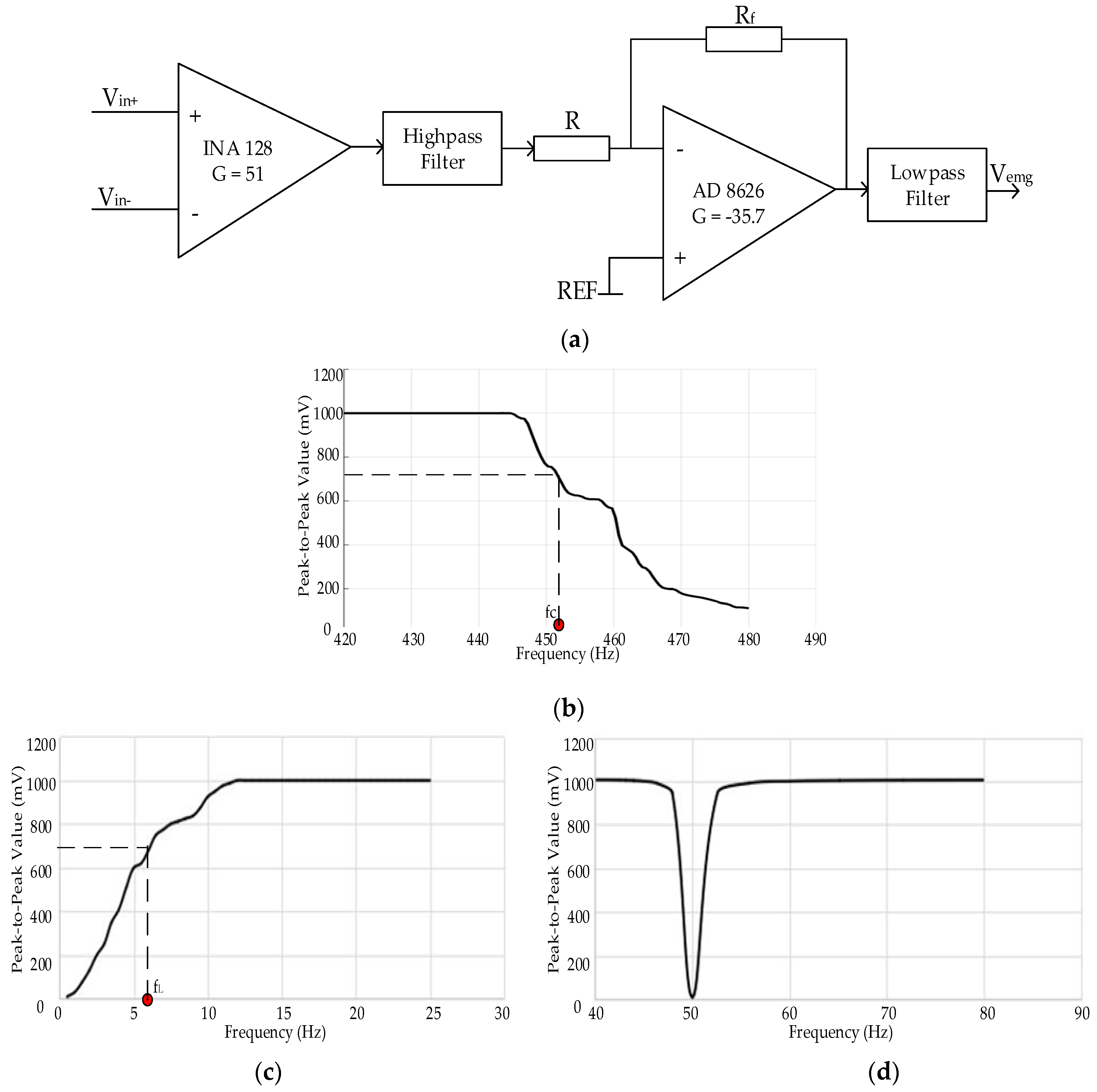
Signal amplifiers and filters are the main components in acquisition systems. Two stages of amplifiers were used to avoid effects on the signals’ bandwidth when the gain of one stage amplifier was too large. The first stage amplifier has a large input impedance, and the gain is 51. The second stage is an inverting amplifier with high gain (−35.7), gain bandwidth product (GBP) and CMRR. Therefore, the total gain for amplification of raw sEMG signals is −1821 as shown in
Figure 6a.
The acquisition systems contain a low-pass filter of 450 Hz, a high-pass filter of 10 Hz and a notch filter of 50 Hz. We validated designs of filters and circuit components in the FilterPro (TI) instead of via manual derivation process. The low-pass and high-pass filters are four-order and two-order Butterworth structure with the Sallen-Key topology, respectively. In addition, a 50 Hz notch filter is integrated in the UAF42.
Frequency responses of filters were measured by applying a 1 Vpp sinusoidal signal logarithmically generated by a function generator.
Figure 6 depicts the amplitude-versus-frequency curves. The frequency range of testing signals is from 1 Hz to 480 Hz. From
Figure 6b,c, acquisition systems show a flat operation on the edge of frequencies of interest (10–450 Hz). The selection and parameter errors of resistors and capacitors resulted in the real cut-off frequency range of on-chip filters is from 6 Hz (f
L) to 451 Hz (fc). In
Figure 6d, we show effects of the notch filer, the interference of 50 Hz has been reduced.
In order to evaluate performance of the recording hardware, we computed the SNR as follows:
where
Am is the maximum RMS amplitude of continuous strained muscles signals and
Ar is the maximum RMS value of noise when a muscle is not activated. SNR of the offline and online acquisition systems are 47.42 dB and 54.09 dB, respectively. The slightly higher SNR in the wearable system can be attributed to the optimized circuit structure and selection of high-performance chips.
6.1.2. Test on the Digital Signal Preprocessing
To improve SNR of systems and quality of sEMG signals, the preprocessing module contains several digital filters, including band-pass filter in the frequency range of interest (10–450 Hz). When adopting dry sensors, significant 50 Hz noise pickup interfered with signals. In order to eliminate this power line noise, we used a combination of analog and digital filters including the elliptic notch and band-stop filters.
The features in time and frequency domains were extracted. Therefore, this section presents the time-domain and frequency-domain verification.
Figure 7a shows time-domain signals at the APL after preprocessing and normalization. An increased amplitude appears after zero to one second in the last three movements, because subjects keep rest in this period. Because of the normalization of each state, amplitudes of signals within 0–1 s in the last three plots are not similar to amplitudes of the REST state. The differences among different movements are clear. The REST and WE states have respectively the smallest and largest amplitudes. The time-series for the WF and MF tasks closely resemble each other. In detail, the MF state has slightly higher amplitudes than the WF state.
The power spectral density (PSD) was estimated for each trial. Averaged PSD zoomed in the range of 0–5 is depicted in
Figure 7b for the time span from 1 to 2.5 s. The MF state has the highest mean PSD, followed by the WF, WE and REST states. In detail, the MF and the WF states have the highest PSD in sub-bands of 10–105 Hz and 105–195 Hz, respectively. Relevant frequencies of all movements are between approximately 10 Hz and 450 Hz. Neural information plateaus around 40–95 Hz, and the range of interest extends to 40–195 Hz for the WF state. Then, the PSD diminishes slowly as the frequency increased to 450 Hz. Mentioned notch and bandstop filters can eliminate the 50 Hz and its harmonic. SNR is improved to 61.47 dB and 68.91 dB for these two acquisition systems, respectively.
6.2. Channel and Feature Selection
According to previous studies, longer time windows would not have significantly improved prediction accuracy [
43,
74]. All sEMG signals during training were analyzed in non-overlapping windows as mentioned in
Section 4.1.1. Each motion modality could extract 160 feature vectors with 250 ms window. If the window length decreased to 125 ms, training sessions contained 1280 feature vectors. To ensure classification performance and reduce training complexity, the window length was 250 ms in the channel and feature selection.
6.2.1. Channel Selection
Although we use only four pairs of sEMG channels, it is still necessary to minimize the number of channels to make systems more mobile and easier to maintain. We rank single-channel classification accuracies using all features.
Table 5 shows accuracies of each channel across all nine subjects.
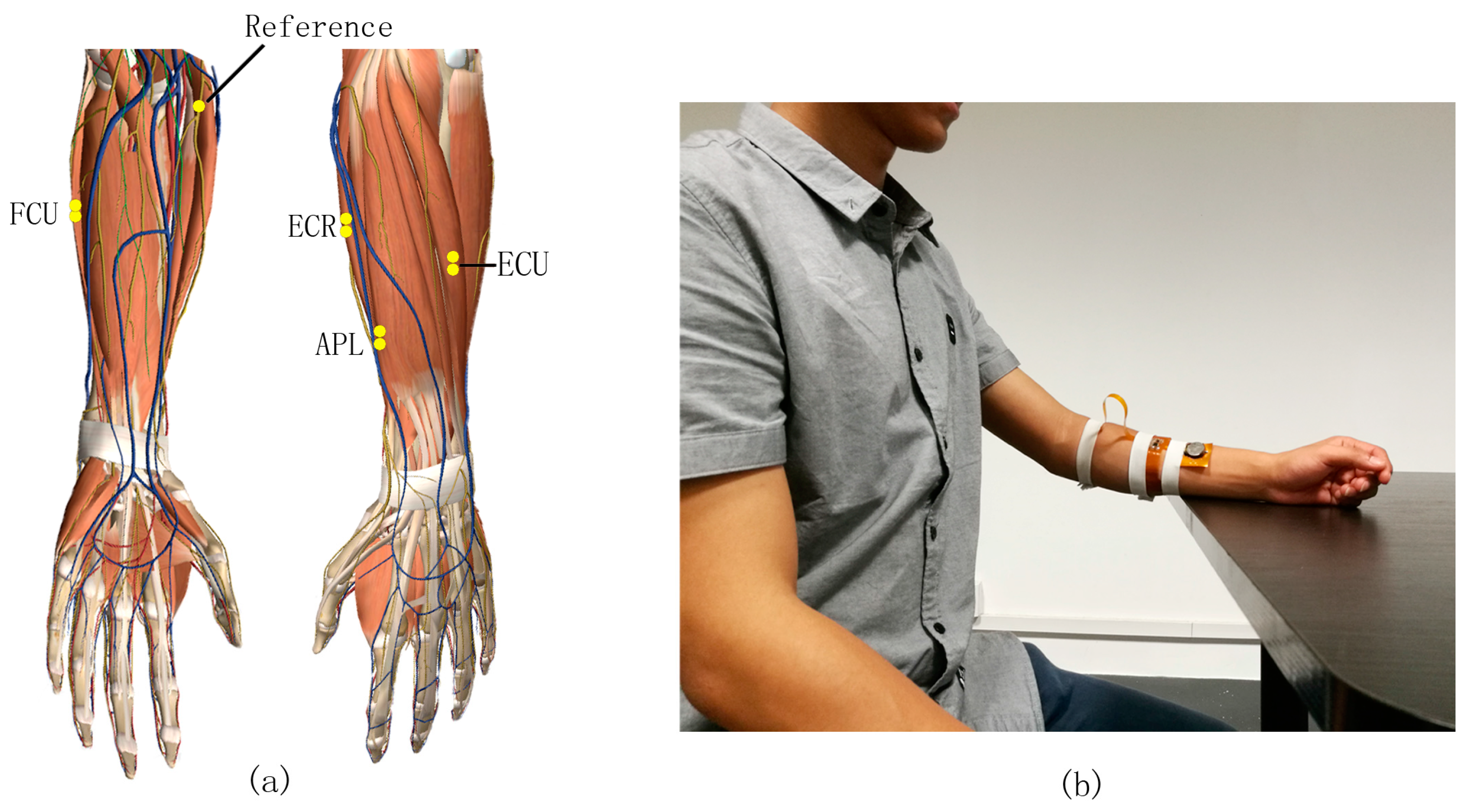
We then select channels located on the ECU and ECR according to
Table 5. Features from the channel ECU achieve the best classification accuracy equal to 97.45%, followed by the channel ECR and FCU reaching 96.55% and 95.00%, respectively. The channel FCU is best for recognizing between the REST and motions states (i.e., the first three pairs in
Table 5). The channel ECU provides the best accuracies compared among different motion states (i.e., the last three pairs in
Table 5). When comparing all motion pairs, first three pairs have higher accuracies than last three pairs. The REST and MF pair obtains the best performance for all channels. Furthermore, the MF and WE pair has the highest distinction among last three pairs.
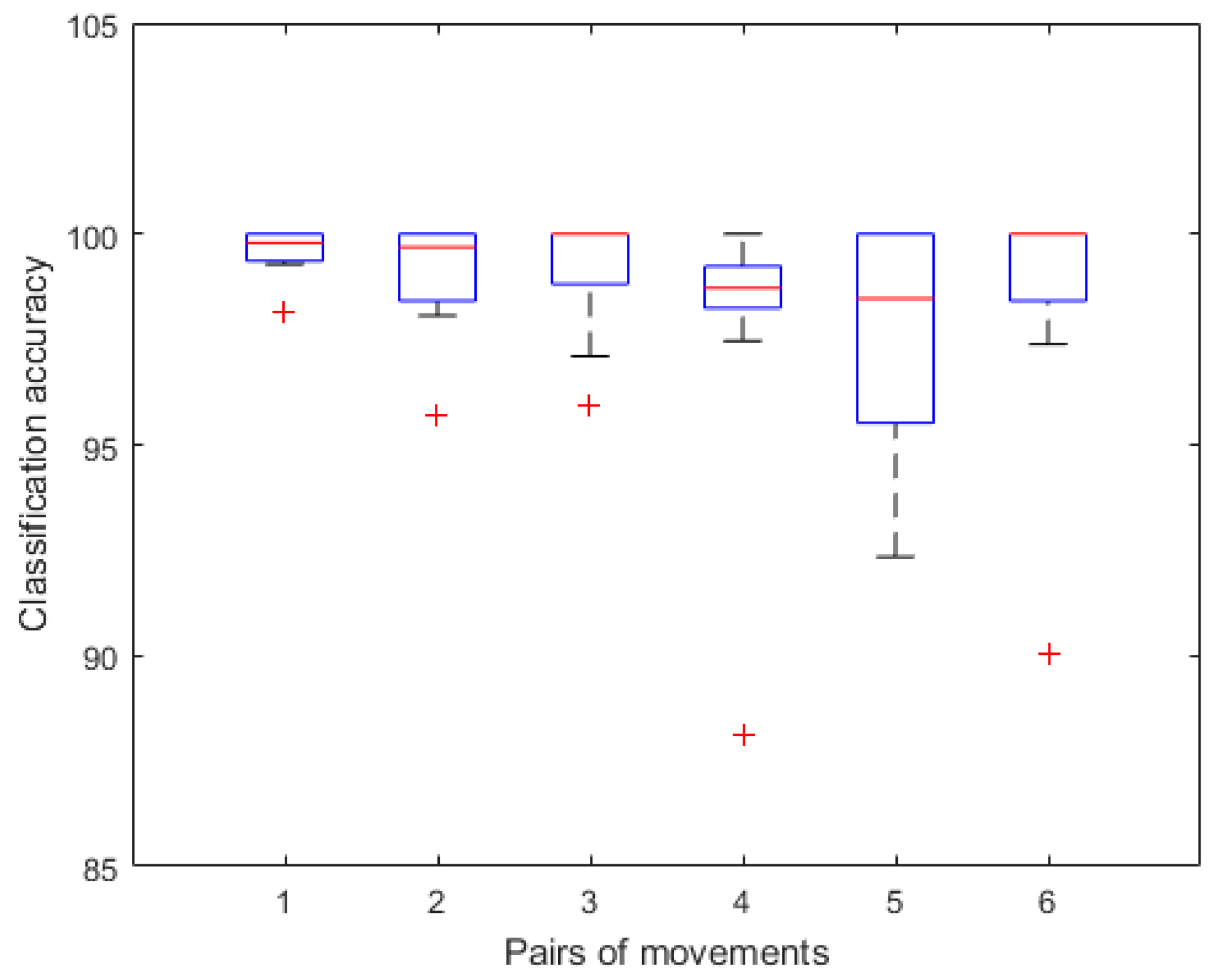
For each subject, we divided sEMG features from these two channels into training and testing sets by ten-fold CV to estimate mean classification accuracies of different pairs of movements as shown in
Figure 8. Accuracies of one subject are lower, which are marked as outliers in the boxplot. Mean accuracies of the first three pairs are 99.56%, 98.99% and 99.12%, respectively. Classification results of the last three pairs are more than 97%. Especially for the third and sixth pairs, median accuracies reach 100%. Above all, compared with single-channel analysis, the selected-channel performance is not significantly improved in recognizing the rest state with other movements. However, channel selection improves accuracies of the last three pairs by 3.75%, 6.33% and 2.80%, respectively.
6.2.2. Classification Performance between Each Two Motions
This part tests the single-channel separabilty between each two movements, and investigates the feasibility of feature selection methods. Proposed EC and FD methods ranked features between two motions. Classification rates were performed as features increased from 1 to 42 to determine the best combination of feature space. Mean classification accuracies (MCA) with optimal feature numbers (OFN) across all subjects were evaluated by LIBSVM in the proposed two situations, and compared with the RFE method.
Table 6 lists MCA with OFN at the channel ECU. Classification accuracies are above 97% for all pairs except for the MF and WE pair. On average, accuracies are slightly higher with lower numbers of features opting for the FD and RFE based feature subsets. When comparing classification performance among different pairs, first three pairs obtain larger MCA with less OFN. Almost same accuracies between the REST and motions states reach about 98% by three feature selection methods. For last three pairs, average accuracies in the range of 94.72–98.16% and 94.68–98.15% are achieved by the FD and RFE methods compared with the range of 94.52–98.06% by the EC method.
One-way analyses of variance (ANOVA) are used for statistical analysis. The factors for analysis are six pairs of motions and three feature selection algorithms. (1) According to
Table 6, the OFN is influenced by different pairs (
F(5,156) = 14.416,
p < 0.001) as well as three algorithms (
F(2,159) = 7.641,
p = 0.001). Post hoc tests of the influence of pairs show that first three pairs use significantly small feature subsets compared to last three pairs, but no differences are found within these two groups. Post hoc tests also show that the FD and RFE methods differ significantly from the EC method (
p = 0.002 and
p = 0.003, respectively), indicating the EC method uses more features to reach the optimal accuracy. There are no differences between the FD and RFE methods (
p = 0.991), because these two algorithms are both based on classifiers learning. (2) The MCA is also affected by pairs (
F(5,156) = 8.716,
p < 0.001), but do not show reliable relationship with algorithms (
F(2,159) = 0.006,
p = 0.994). Post hoc comparisons reveal that the MF and WE pair has significantly lower accuracy than other pairs. All other pairs have no differences within each other except for comparing the first and fifth pairs (
p = 0.039).
Furthermore,
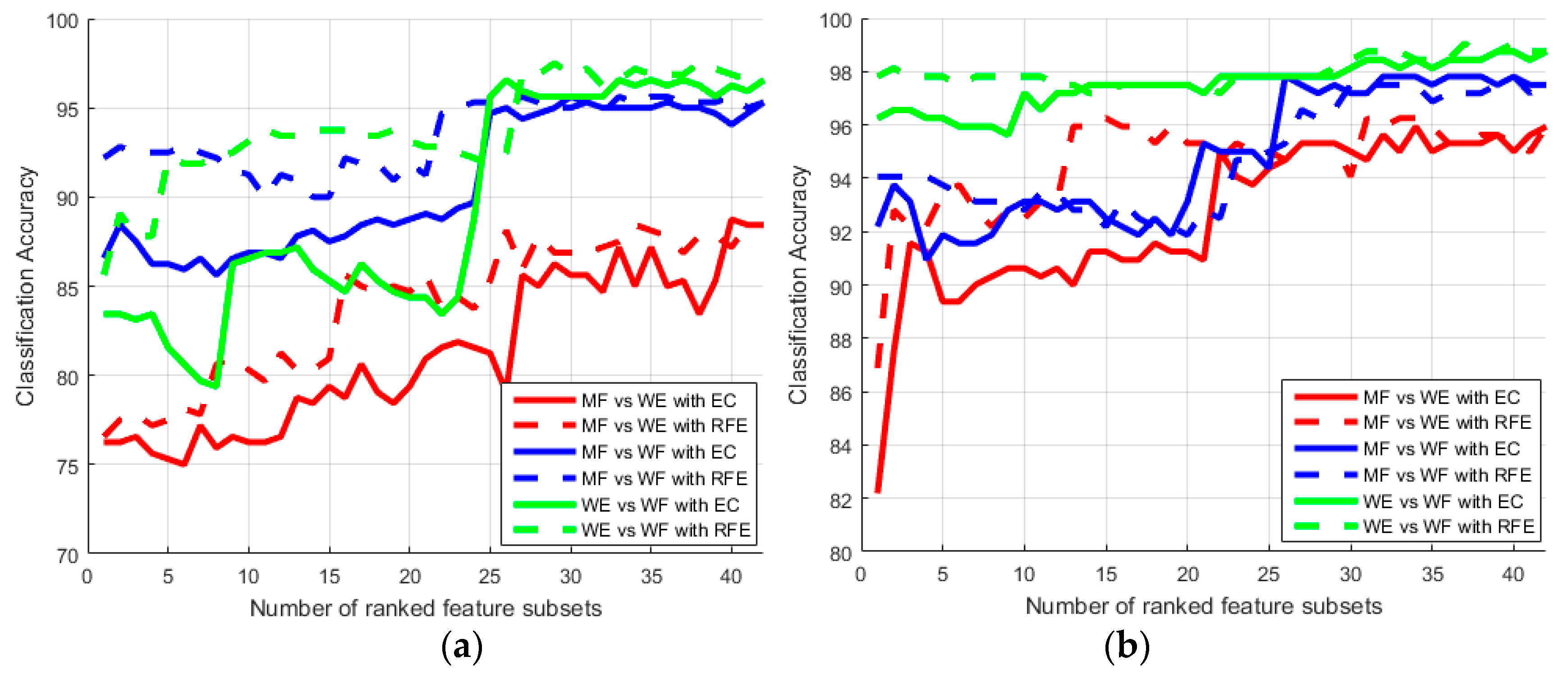
Figure 9 shows classification accuracies of three pairs of motions (i.e., the last three pairs in
Table 6) as features increases by the EC and RFE ranks. The classification accuracy increases as the feature space increases. We assert that this is due to insufficient information provided with small feature subsets. However, when the feature size exceeds OFN, the accuracy remains high and then begins to decrease due to over-fitting. It illustrates one reason why feature selection is necessary. When number of selected features is less than 25, the RFE method performs better than the EC method. Then, performance of these two method reaches the same level.
Figure 9a plots the best recognition rates of subject S6 could be improved to 89.38%, 95.63% and 97.5% with 36, 23 and 31 features picked by the RFE method for mentioned three pairs, respectively. As shown in
Figure 9b, subject S7 uses the EC method to select 33 features to yield 96.25% accuracy comparing the MF and WE states, to select 37 features to yield 98.13% accuracy comparing the MF and WE states, and to select 33 features to yield 98.44% accuracy comparing the WE and WF states.
6.2.3. Feature Selection
The feature selection analysis is as follows. First, the dimension of optimal features is determined by single-channel analysis of ECU and ECR. This step combines feature selection and classification processes. Mean optimal feature numbers across all channels and subjects are 31, 23.3, 32.8 for the EC, FD and RFE methods, respectively. Then, the focus in this section is to identify common features from these subjects for future application. The advantage is that under repeated use, limitation to specified features reduces training and processing times. Two weighting methods were used to select specified features derived from the SV rank of different feature selection algorithms.
The weighting methods based on proposed EC and FD methods belong to quantitative weighting methods because they have detailed numerical evaluation. The single-channel SV of each feature is normalized to the range of 0 to 1, and averaged across all subjects. Then the separability criteria is the summation of all single-channel SV. Detailed features are determined by considering the 1st–31st and 1st–23rd features of EC and FD methods respectively according to their SV ranks.
Table 7 shows total selected features from mentioned two feature selection algorithms, as well as the separability value of each feature. For the FD method, improper amplitude thresholds lead to the exclusion of WAMP1 and entire HEMG features except for HEMG1. All frequency features and the STFT are also neglected. Removal of APWC_D4 to APWC_A6 and SDWC_D5 to SDWC_A6 indicates a low effect of low-frequency components. For the EC method, features in the time domain including ZC1, WAMP4, WAMP5, HEMG1 and HEMG2, as well as all frequency features are eliminated.
The RFE method can indicate whether an individual feature is within the optimal subset with 1st–33rd features for a particular subject. The frequency with which each feature occurred among the top 33 features, across all subjects and channels, is considered. These frequencies are sorted in a descending order.
Table 7 presents the top 33 features and their frequencies marked as T
32. Because we select two channels for nine subjects, the highest time should be 18. The results show that seven features form the best feature combination for this method. These features include variance, the first and third thresholds for Willison amplitude, and average power of the wavelet coefficients in the 1st–4th sub-bands. In contrast, two dimensions of the AR coefficients never enter top 33.
From the table, the optimal feature subsets with qualitative and quantitative weighting analysis indicate that time-domain and time-frequency-domain features lead to a better separability performance than frequency-domain features.
6.3. Classification Performance
Four amplifiers (kNN, ANN, RF and SVM) and three analysis windows (125, 250 and 500 ms) were compared in this section.
6.3.1. Comparisons of Feature Subsets and Classifiers
Table 8 summarizes classification results for different feature combinations. In this study, seven different feature subsets are classified by four different algorithms such as kNN, ANN, RF and SVM. Each classifier is trained and tested with data from the same subject. Bold numbers in
Table 8 indicate the best classifier for each feature subset. RF and ANN classifiers perform better for all subsets. RF with FD-based features ranks first at 96.77%, followed by ANN at 96.67%, SVM at 95.40% and kNN at 94.41%. In classification of EC-based features, ANN provides the superior accuracy with 96.74%, and RF ranks second with 96.66%. SVM gives 95.37% and kNN is with 94.73% ACC. All classifiers deliver above 94% accuracies after feature selection.
As shown in
Table 8, classification performance of EC-based and FD-based features almost have no differences. Both of them are slightly better than RFE-based features and single-type features. Compared among single-type features (RMS, MAV, APWC and SDWC), the wavelet coefficients have better classification accuracies than RMS and MAV. The reason is that features of sEMG signals after time-frequency preprocessing offer a better classification precession [
75]. Above all, smart combinations by feature selection methods provide more accurate features.
F-Score is another index to evaluate classification performance calculated by the formula:
where TP, FP and FN are the numbers of true positives, false positives and false negatives in the confusion matrix, respectively. ACC and F-Score are close to each other, which indicates all classifiers achieve reliable performance on these feature subsets. With EC-based features, RF obtains 96.66% ACC and 0.9656 F-Score. The F-Score of FD-based features classified by RF is 0.9669, which is coincident with 96.77% ACC. It is also the case for other classifiers.
For statistical analysis of classification accuracy, different feature subsets and classifiers are the factors. The ANOVA reveals significant effect of feature subsets (F(6,245) = 14.323, p < 0.001) and classifiers (F(3,248) = 2.990, p = 0.032). However, the two factors interacted missed the 5% criteria (p = 0.677). (1) From post hoc analysis, the feature subsets could be divided into two groups. The first group contains feature space selected by algorithms. The second group is all single-type features. The two groups differ significantly (p < 0.001), but no differences appear within each group (p > 0.5). The results demonstrate that performance of feature selection algorithms is significantly better than single-type features. (2) In view of different classifiers, RF is significantly better than kNN (p = 0.036) and marginally better than SVM (p = 0.109). Furthermore, ANN has almost similar performance with RF (p = 0.796).
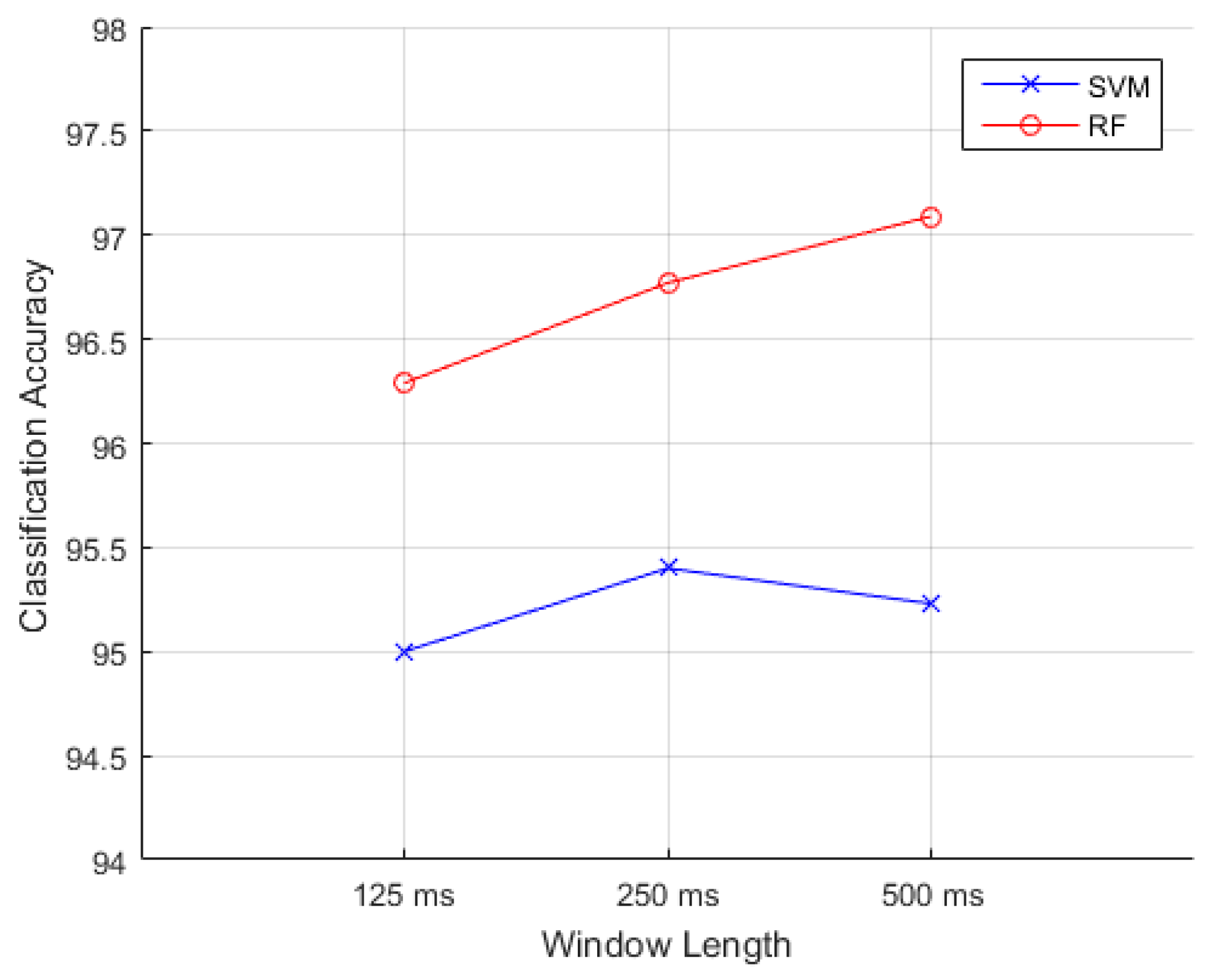
6.3.2. Comparisons of Analysis Window
Figure 10 shows the effects of analysis window length and accuracies. The mean accuracies are calculated by RF and SVM classifiers with the FD-based feature subset. RF performs better with these three epochs. Mean classification accuracies are 96.29%, 96.77% and 97.09% for the 125, 250, and 500 ms windows, respectively. The difference is non-significant (
p = 0.744). Statistical analysis implicates that when shortening window length to 125 ms, the accuracy is not deteriorated. The advantages of adopting shorter windows are low computational cost and little storage space. Moreover, it is important with regard to the real-time classifier.
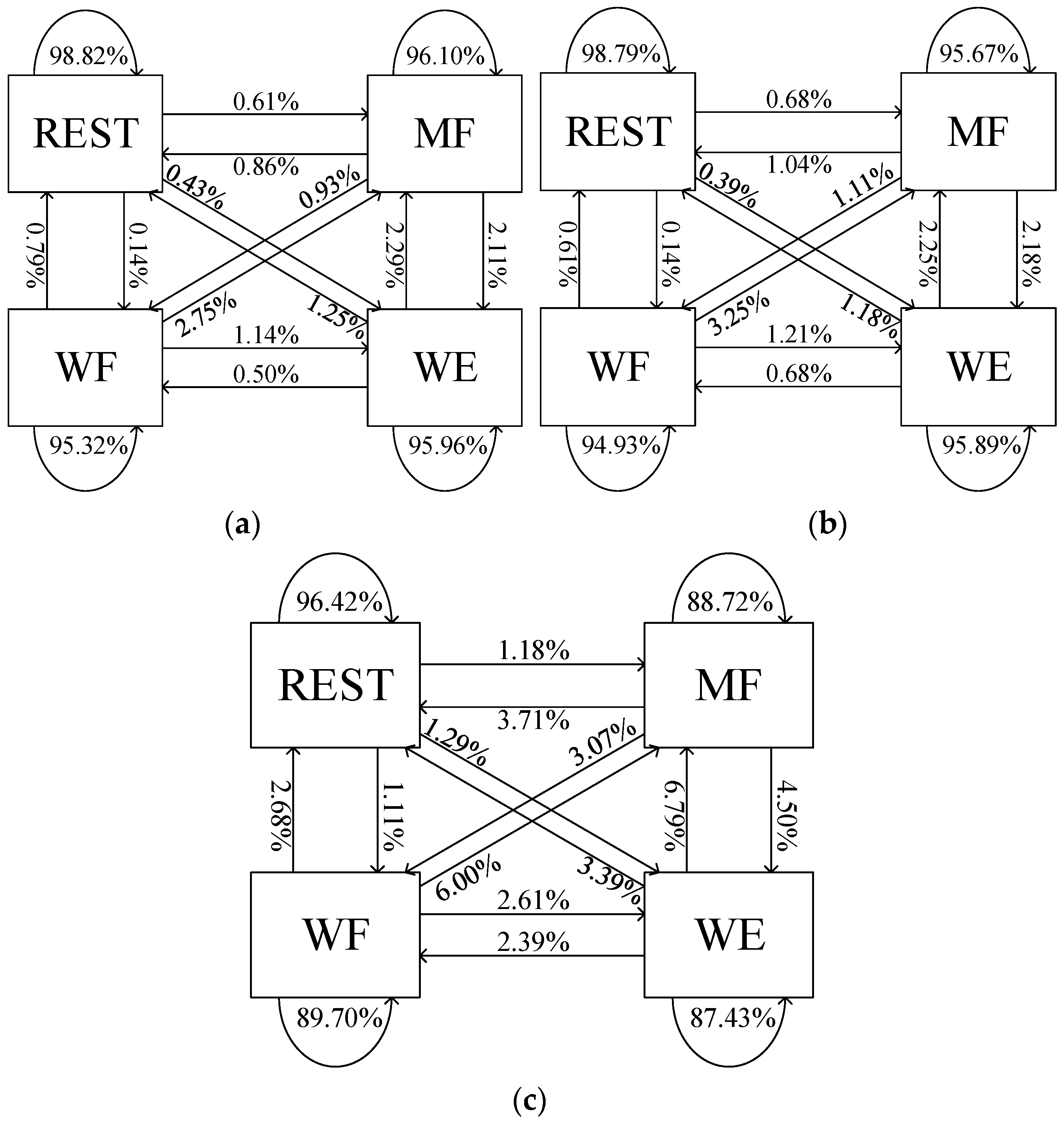
6.3.3. Comparisons of Confusion Matrices
Each motion indicates a detailed command in the online system. Therefore, we structure the confusion matrix of each modality to investigate results of parameters and model selection.
Figure 11 shows the recognition performance of FD-based, RFE-based and APWC feature subsets, respectively.
These features are extracted from 125 ms windows, and classified by RF. The FD method (REST: 98.82%, MF: 96.10%, WE: 95.96% and WF: 95.32%) is slightly better than the RFE method (REST: 98.79%, MF: 95.67%, WE: 95.89% and WF: 94.93%). The feature selection process is helpful to classify all states compared to single-type APWC features (REST: 96.42%, MF: 88.72%, WE: 87.43% and WF: 89.70%). The REST modality achieves the best recognition performance as sEMG amplitudes of keeping rest and moving have large differences shown in
Figure 7. Whereas, the MF, WE and WF modalities are misclassified to others, especially for the MF and WE modalities. These observations are in line with the results in previous sections. They indicate that assessment of multi-class recognition is feasible with proposed feature selection methods. Our proposed FD method can improve the prediction performance and reduce the feature numbers compared with the conventional RFE method and single-type features.
6.4. Online Evaluation by Wearable EMG-based HCI
Each subject performs eight online sessions according to four separate paradigms. The selected features extracted from optimal channels and the trained RF model are opted for online sessions. Averaged recognition rates (RR) and travel time (TT) of each paradigm for all subjects are recorded and referred to
Table 9. In Paradigm 2, moving directions offer labels for classification. Therefore, the RR equals to classification accuracies. However, in Paradigm 3 and 4, subjects control the vehicle according to their thoughts. Here, the RR in Paradigm 3 denotes success rates of recognizing classification results of both channels are same. Since it is hard to define which motion is right in Paradigm 4, the RR is not presented in
Table 9 as a criterion.
The results illustrate all subjects are able to complete these online paradigms with acceptable accuracies and travel time. The TT in last three paradigms is close to the joystick paradigm (Paradigm 1). Averaged time of Paradigm 1 to finish the loops is 45.18 s. In the fixed-moving paradigm (Paradigm 2), subjects can accomplish two sessions within the mean time of 46.02 s with 95.01% RR. Paradigm 3 and 4 increase the control time to 49.06 s and 48.08 s, respectively. The increment is achieved that when two channels have different classification results in Paradigm 3, the vehicle stops and waits. Transience pauses also happen in mode switches during Paradigm 4. Although Paradigm 3 and 4 are more sophisticated, these paradigms are closer to daily life. In Paradigm 2, only one command could make the vehicle move a fixed distance. However, in Paradigm 3 and 4, subjects decide each minor motion by their own ideas. Compared these two complex paradigms, subjects use less travel time in Paradigm 4. The reason is that success rates are lower to ensure both channels have the same class for Paradigm 3. S3 completes all sEMG-based sessions using the shortest time with the highest RR. On the contrary, S8 performs the worst.
The rough relationship between the TT and RR in Paradigm 2 and 3 is that more TT uses, less RR obtains. However, there are some special situations in detail. For example, the TT of S9 is similar with S5 (46.59 s vs. 46.60 s in Paradigm 2), but S5 has higher RR (96.00% vs. 91.77% in Paradigm 2). S9 can send out control commands before the end of vehicle-moving periods, although he misclassifies some motions. The performance decreases sharply controlling Paradigm 3 for a small number of subjects. The RR reduces 9.37% and 7.74% for S2 and S6, respectively. According to the offline and online analysis, performances of two selected-channels have some differences. For S2, accuracies of ECR and ECU are 90.76% and 96.80% in the offline analysis. The problem is solved in Paradigm 4 to a certain extent because of using combined features from both channels. The real-time RR obtained in Paradigm 2 is slightly lower than offline sessions. A main reason is the states with high accuracies are less than offline experiments. For example, Paradigm 2 needs only four backward commands controlled by the REST state which has 98.82% offline RR.
The results of statistical analysis illustrate that the travel time shows a significant effect of paradigms (F(3,68) = 14.149, p < 0.001). Post hoc tests reveal the TT of Paradigm 1 is significantly shorter than Paradigm 3 and 4 (p < 0.001), but it has no difference with Paradigm 2 (p = 0.607). Subjects use slightly less time in Paradigm 4 compared with Paradigm 3 (p = 0.548).
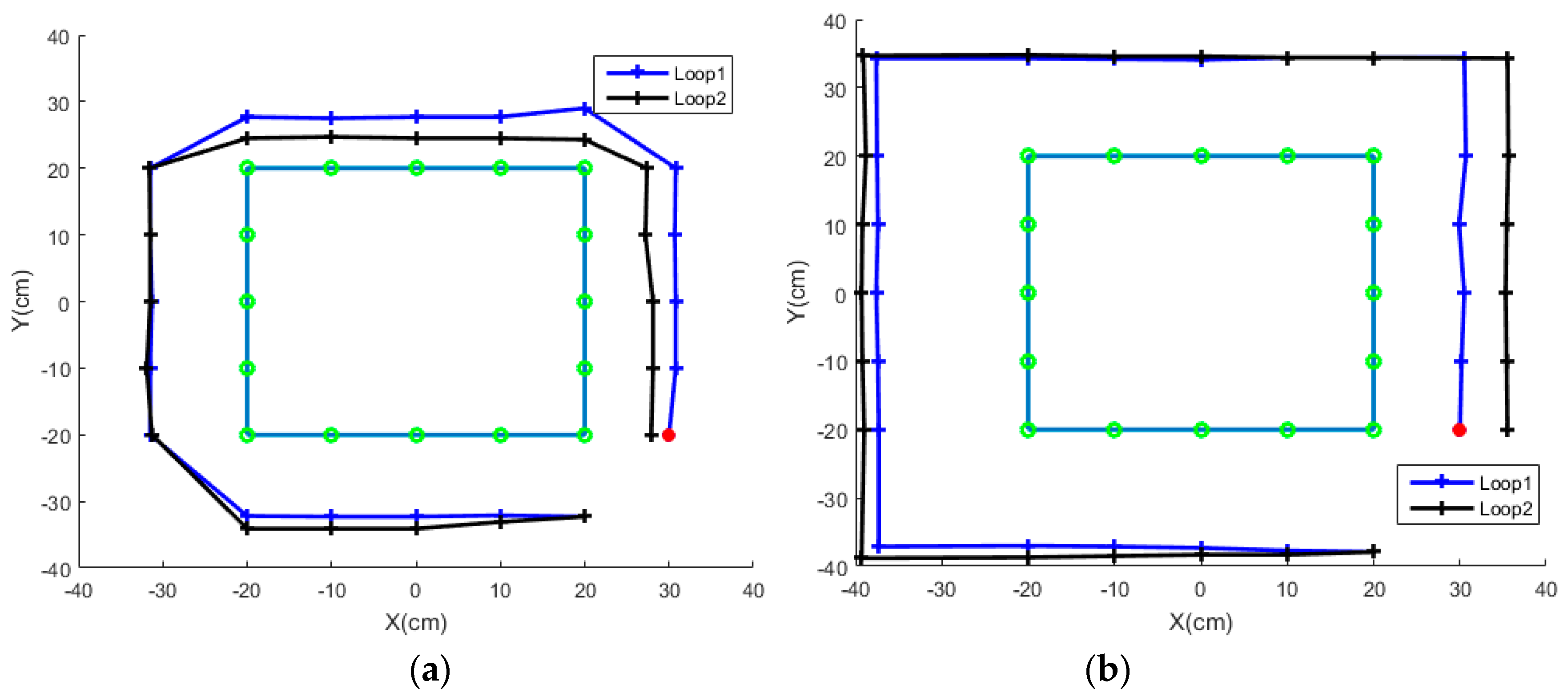
The route tracking performance of two subjects for the rectangular route is provided in
Figure 12. Position measurements are taken when the vehicle reaches a certain position as green circles in the figure. During the online implementation, rotational movements are more difficult than straight-line movements for most subjects. The difference between S3 and S8 is related to two control methods facing a turn. A group of subjects turns a degree, moves forward and adjusts the direction for the next straight-line motion, as shown in
Figure 12a. The other group of subjects moves forward for an enough distance and makes an approximate 90 degree turn at the corner, as plotted in
Figure 12b. The first group needs short path length, but also needs to change modes three times. After turning, the vehicle could move in a straight line without too many fluctuations.
8. Conclusions
Two wearable sEMG acquisition systems are designed and implemented successfully in this work. The PCB-based prototype can capture four-channel sEMG signals simultaneously from different forearm muscles, and the FPC-based system with two channels are utilized for online control. The system could communicate with a laptop wirelessly through Bluetooth. The high SNR of 61.47 dB and 68.91 dB for these systems ensure the signal quality. Temporal and frequency responses indicate that the system can remove noise and are stable during all motions.
The ECU and ECR channels are selected with 97.45% and 96.55% mean classification accuracies across all pairs of motions and subjects. In single-channel analysis, the FD and RFE methods achieve the optimal accuracy with significantly less features than the EC method (p = 0.002 and p = 0.003 respectively). For the channel ECU, the average accuracy increases to 97.82% with only 14 features. Accuracies above 98% are achieved comparing the REST state with other states. The FD method produces recognition rates in the range of 94.72% to 98.16% comparing among three motions.
Detailed features are selected according to the level of feature separability provided by the EC, FD and RFE methods. According to qualitative and quantitative weighting analysis, these three methods opt for 31, 23 and 33 features, respectively. The feature selection results also prove that time-domain and time-frequency-domain features provide more discriminative information than frequency-domain features. The FD-based feature subset with RF classifier achieves 96.77% accuracy, which is better than other methods and single-type features referred in some references.
Furthermore, to validate the feasibility of proposed methods, we invited same group of subjects to control the designed toy vehicle using four different paradigms. Subjects can accomplish the online task by joysticks with averaged 45.18 s. For the fixed-moving paradigm, the mean travel time is 46.02 s with 94.79% recognition rate. The results of Paradigm 3 and 4 reveal that these paradigms can improve the maneuverability and provide potentials in more sophisticated paths.
Therefore, all mentioned results suggest that our proposed acquisition systems and algorithms can be used in the HCI research. The future work focuses on recording and discerning more motions to realize the accurate implementation of smart wheelchairs.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}