A Fog Computing and Cloudlet Based Augmented Reality System for the Industry 4.0 Shipyard

 ,
,  ,
,  and
and
Abstract
:1. Introduction
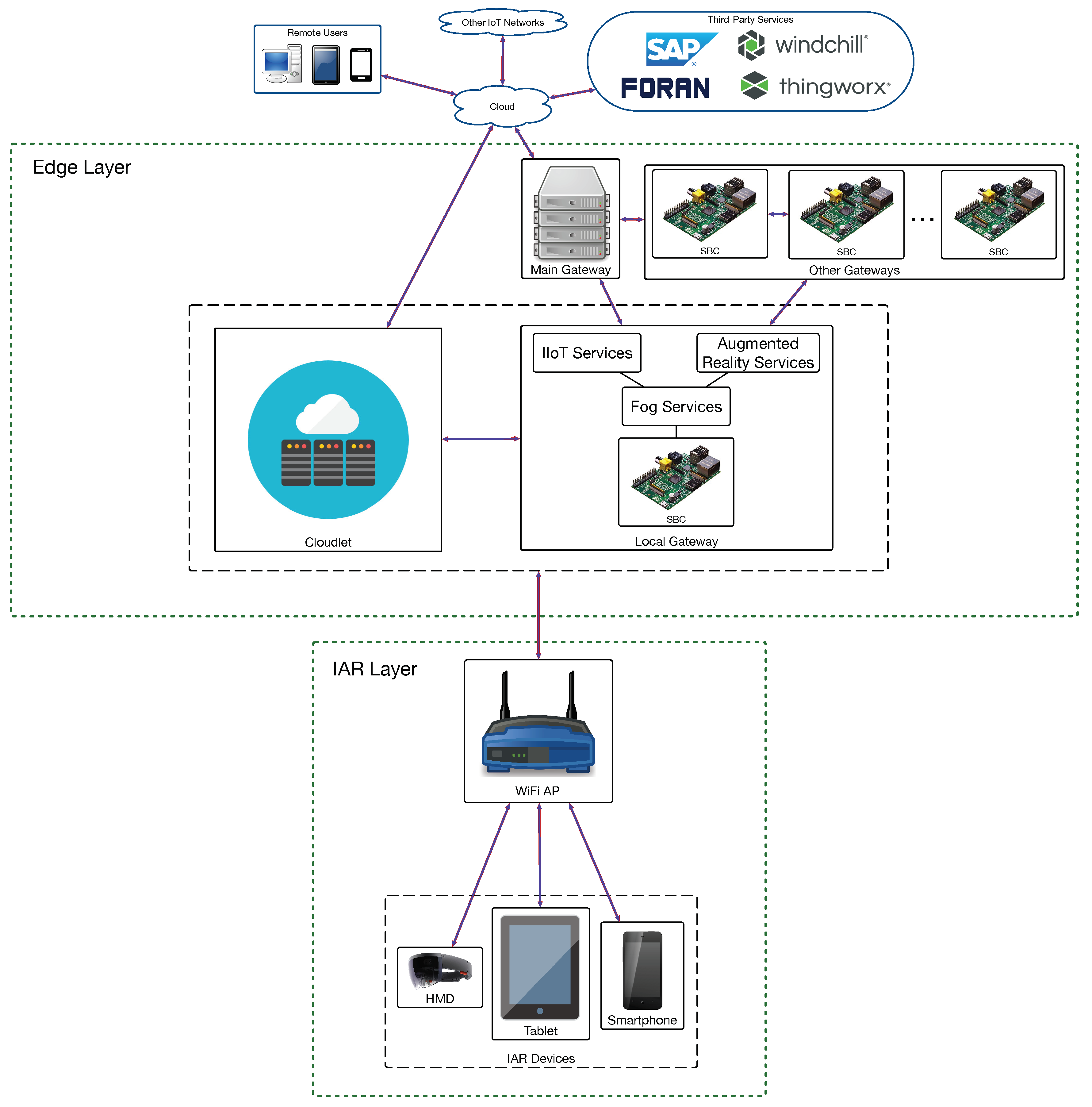
- It presents a novel architecture that merges cloudlets and fog computing devices to provide fast IAR device communications.
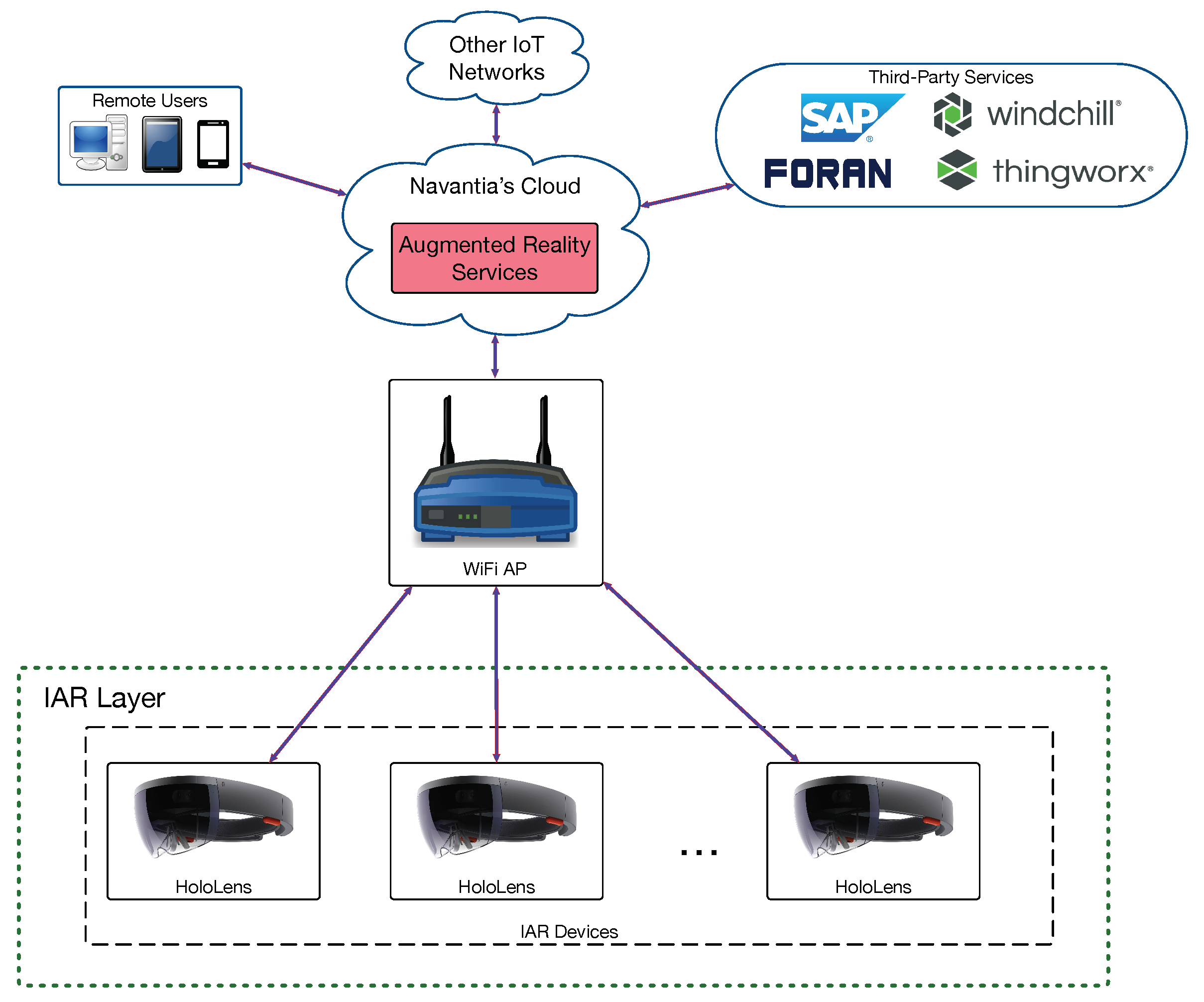
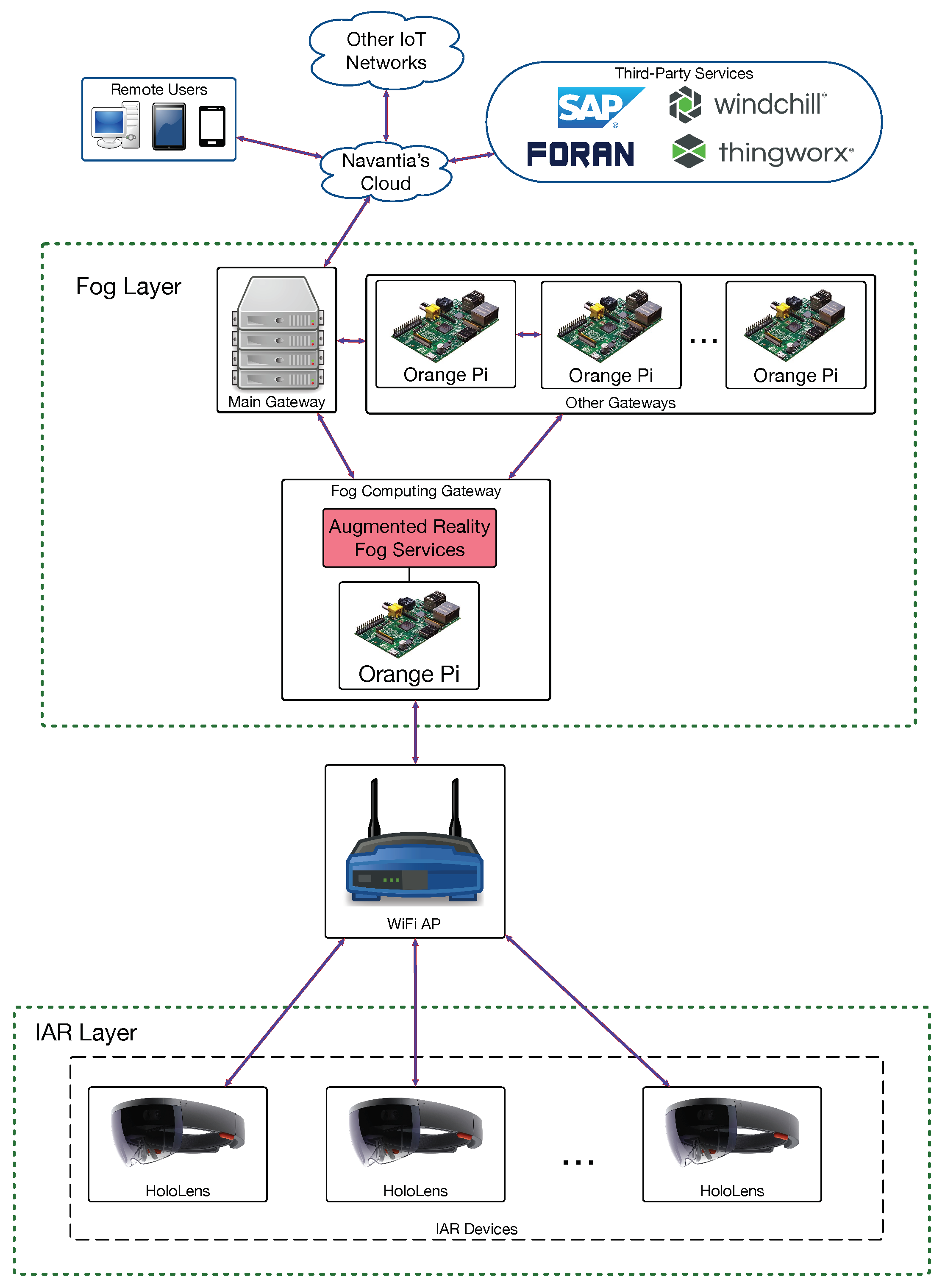
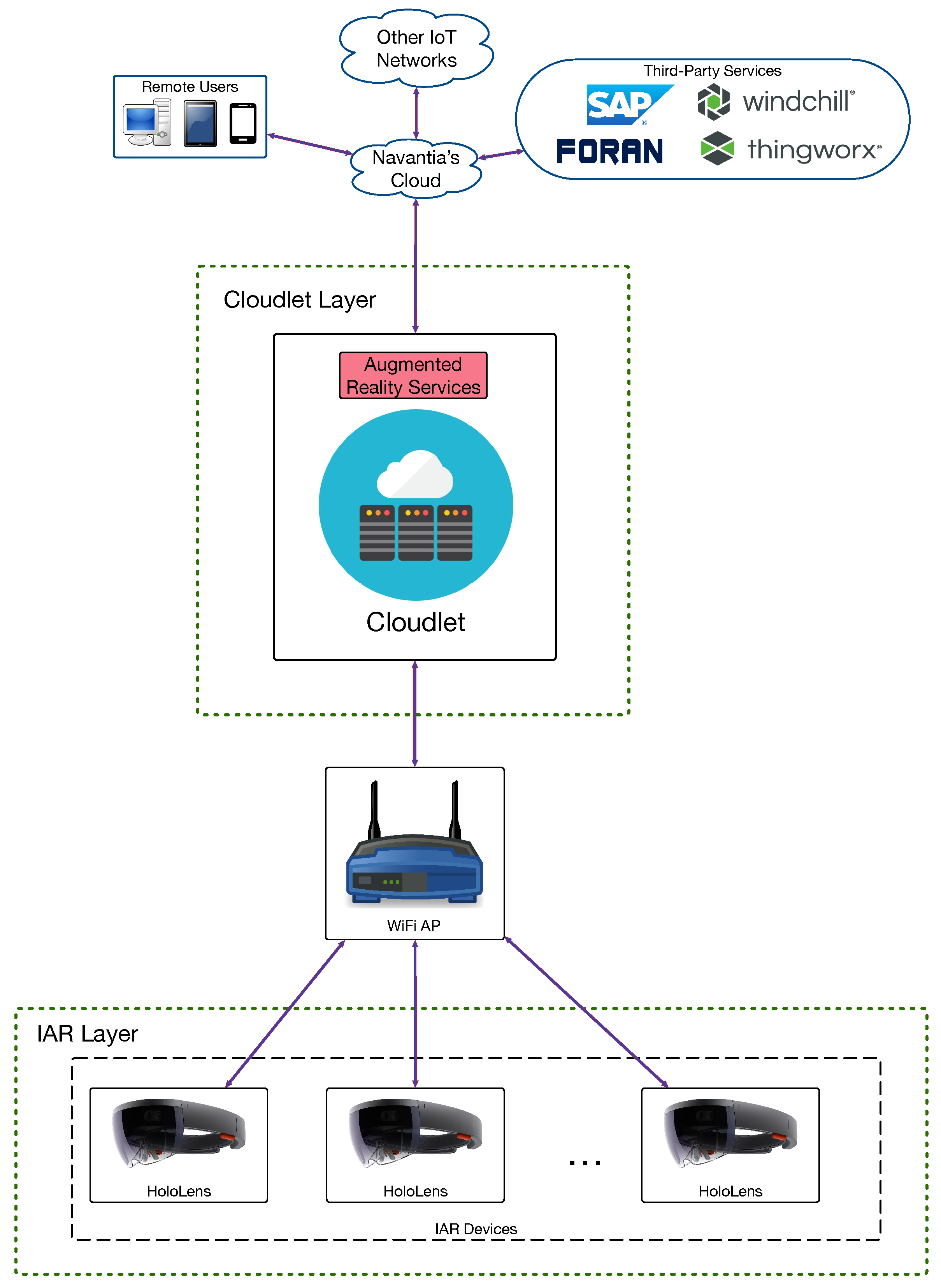
- It evaluates cloud, fog and cloudlet systems in real IAR scenarios when transferring payloads of different sizes.
- It also shows a performance evaluation in a scenario when up to 240 virtual IAR clients are transmitting payloads with a size according to demanding Microsoft HoloLens [29] applications.
2. State of the Art: AR in the Shipyard
2.1. Commercial and Academic Systems
2.2. Potential IAR Applications in a Shipyard
- Providing plant information. In the case of Navantia’s shipyards, most information about products and procedures is stored digitally, but operators still rely on paper documents.
- Performing quality controls. At the manufacturing stage most processes require a supervisor to perform a quality control where it is necessary to compare the design model with the actual product, which involves consulting datasheets and determining if the product requirements are fulfilled [41].
- Assisting operators during assembly and manufacturing processes. The manufacturing process of the products created in a shipyard (e.g., pipes, metal sheets) requires sequential steps that must be followed in a specific order. IAR can help operators by providing them with step-by-step instructions through intuitive interfaces, which have proved to reduce significantly the number of human errors [42].
- Locating items. Shipyard workshops are usually quite large, what makes it difficult to locate certain items. An IAR system can help operators by pointing at the specific location of the item or at the area where it is placed. In certain cases, this functionality may be implemented into the IAR software, but, in large spaces, it is more common to make use of sensors or third-party location systems. For example, in Navantia’s pipe workshop a pipe location system is deployed based on active Radio Frequency IDentification (RFID) tags [43,44,45] that can exchange data with IAR applications.
- Guiding and navigating environments. Shipyards are often quite large. In the case of Navantia’s shipyard in Ferrol (Galicia, Spain), it occupies 1,000,000 square meters. Therefore, it would be useful to guide operators through the optimal route when they go from one place to another [46]. Moreover, a guiding system may help indoors, in the workshops and warehouses, when looking for specific items or areas.
- Visualizing hidden areas. In many shipyard installations and inside a ship, part of the piping and wiring is installed behind walls or bulkheads, which makes it difficult to carry out maintenance procedures and to detect the origin of certain faults. An IAR display can superimpose digital 3D models with reality and then ease the location of the underlying infrastructure [47].
- Performing predictive maintenance. The use of IIoT, Big Data techniques and IAR devices can help to detect and to warn operators about anomalies that may cause imminent or future problems [50].
- Augmented collaboration. In Navantia’s shipyards, like in other shipbuilding companies, communication systems usually only involve voice communications (e.g., walkie-talkies, mobile phones). IAR systems are able to provide first-person video and audio content to remote collaborators, which enriches the communication and eases remote guidance on the resolution of incidents [51]. In addition, IAR devices usually allow for creating enriched notes, enhancing dramatically traditional text-based reports [52].
2.3. IAR Architectures
3. System Design and Implementation
3.1. Communications Architecture
3.2. IAR Software and Hardware
- It should be as accurate as possible, reliable and provide fall-back alternatives.
- An IAR application should be user-friendly, making as easy as possible its setup and the learning period.
- The application should be scalable, since factories involve many users interacting concurrently. The advantages and disadvantages of cloud and fog computing architectures have to be weighted in order to determine which fits better depending on the user requirements.
4. Experiments
4.1. Experimental Setup
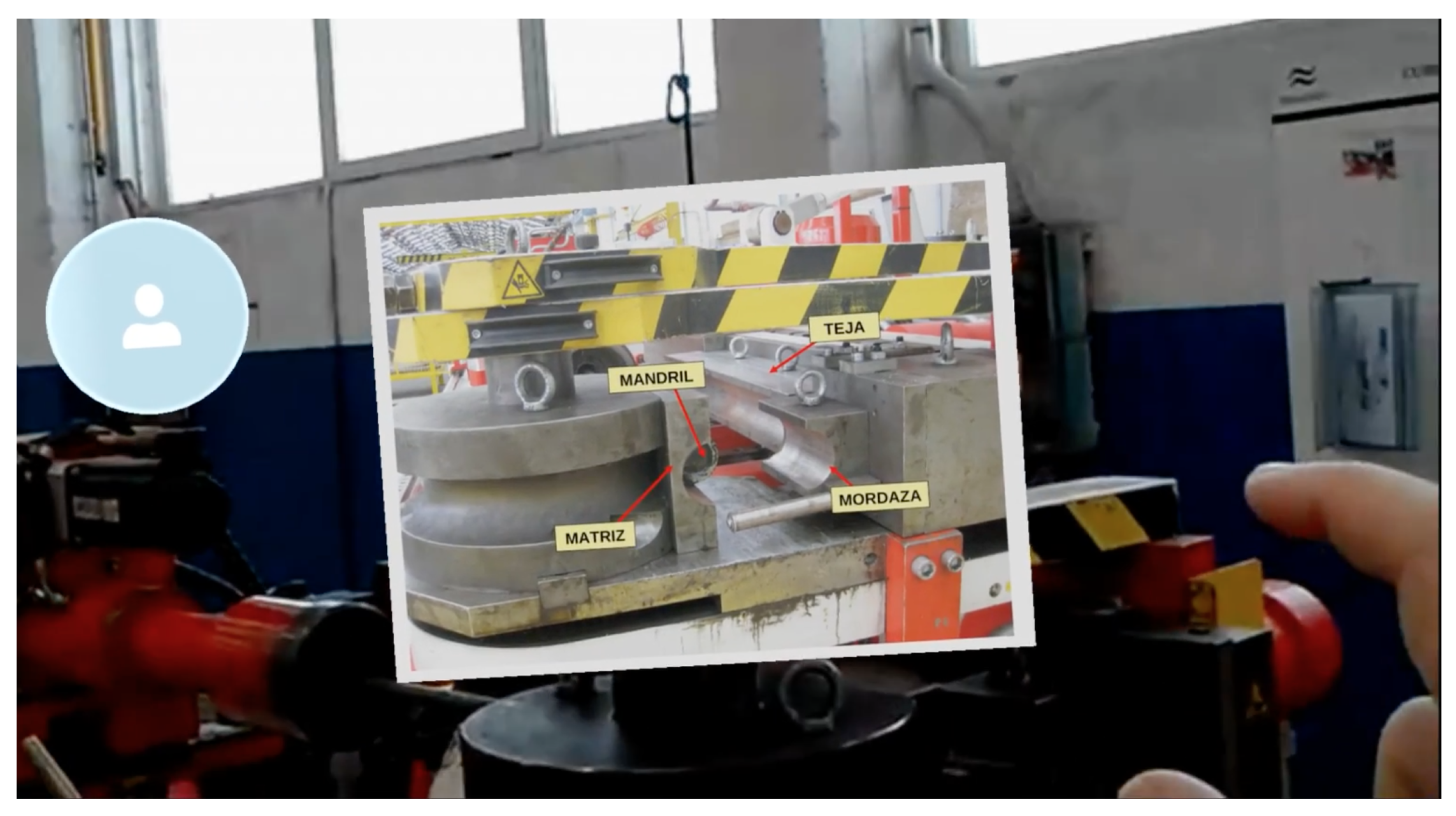
- A Holo app (an application for HoloLens) that embedded Skype for remote augmented collaboration in the shipyard’s pipe workshop. Figure 5 shows a screenshot of the application. In the Figure, one of the moments when a remote worker (who is using Skype) guides the operator wearing the Microsoft HoloLens through the steps for performing a specific maintenance procedure on a bending machine is shown. Figure 6 shows the mentioned operator following the remote instructions. The data exchanged by the HoloLens with the upper layers of the architecture were basically Skype frames, which make use of a closed-source protocol that is able to stream audio (voice-over-IP from the HoloLens towards the remote collaborator and from such a collaborator towards the operator with the HoloLens) and video (it was only streamed video from the HoloLens front-facing camera to the remote collaborator).
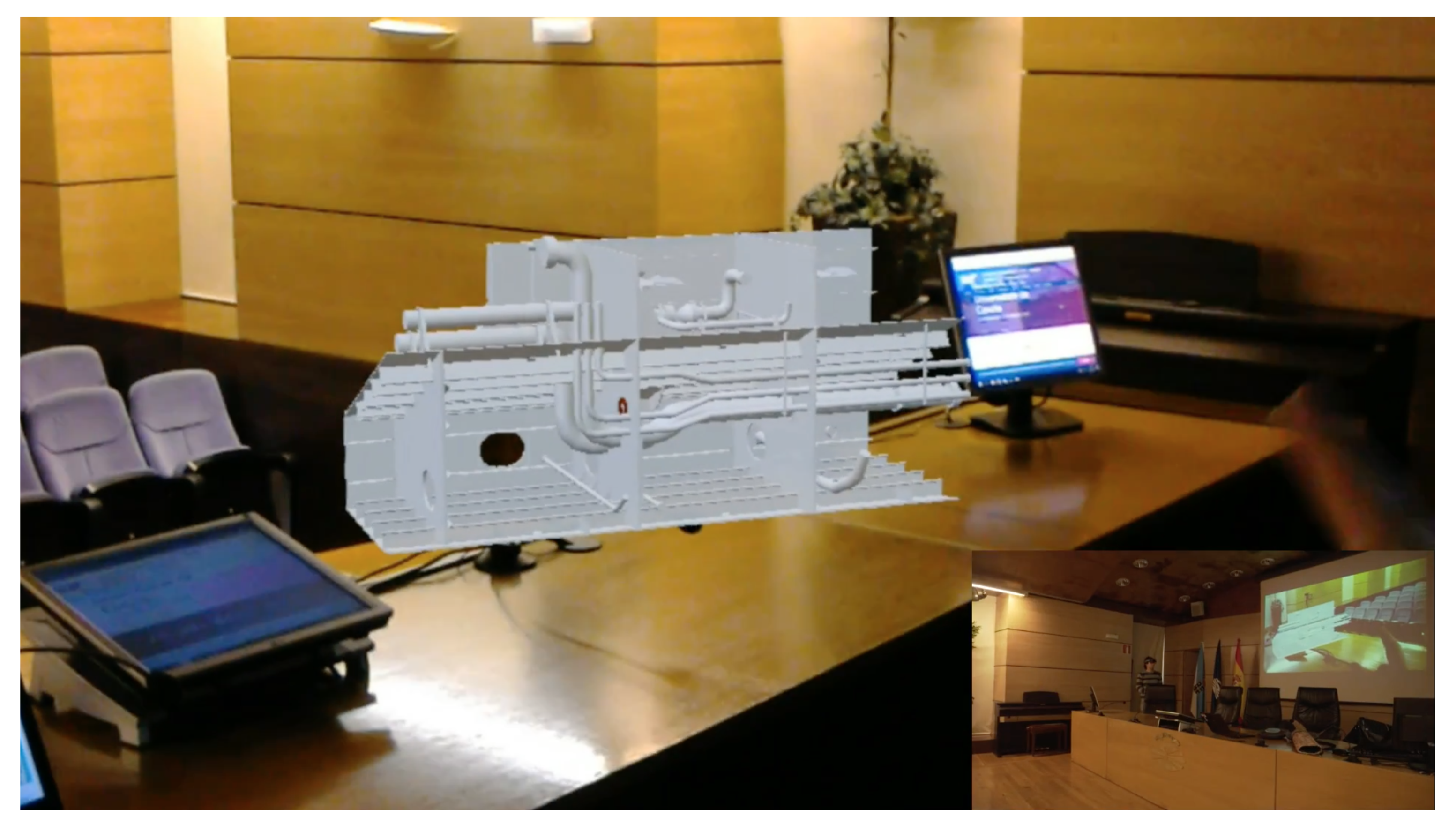
- The second Holo app was a streaming application that projected highly polygonal models. Such models were extracted from FORAN in JT and OBJ formats. Since the total file size of the raw 3D models was actually large (1.5 GB), before including them in the Holo app, they were polished with Blender [70] to reduce the number of required triangles (the raw 3D models were made of 630,477 triangles). The final models only use 65 MB of disk and 28,726 triangles. Figure 7 shows a screenshot of the app when projecting a ship block during a design meeting. The models were first downloaded into the HoloLens and then they were projected in a specific place (selected by the user) of the meeting room. The mixed reality 720p video captured by the HoloLens was then sent via WiFi through a streaming service to a remote computer that was connected to an HDMI projector.
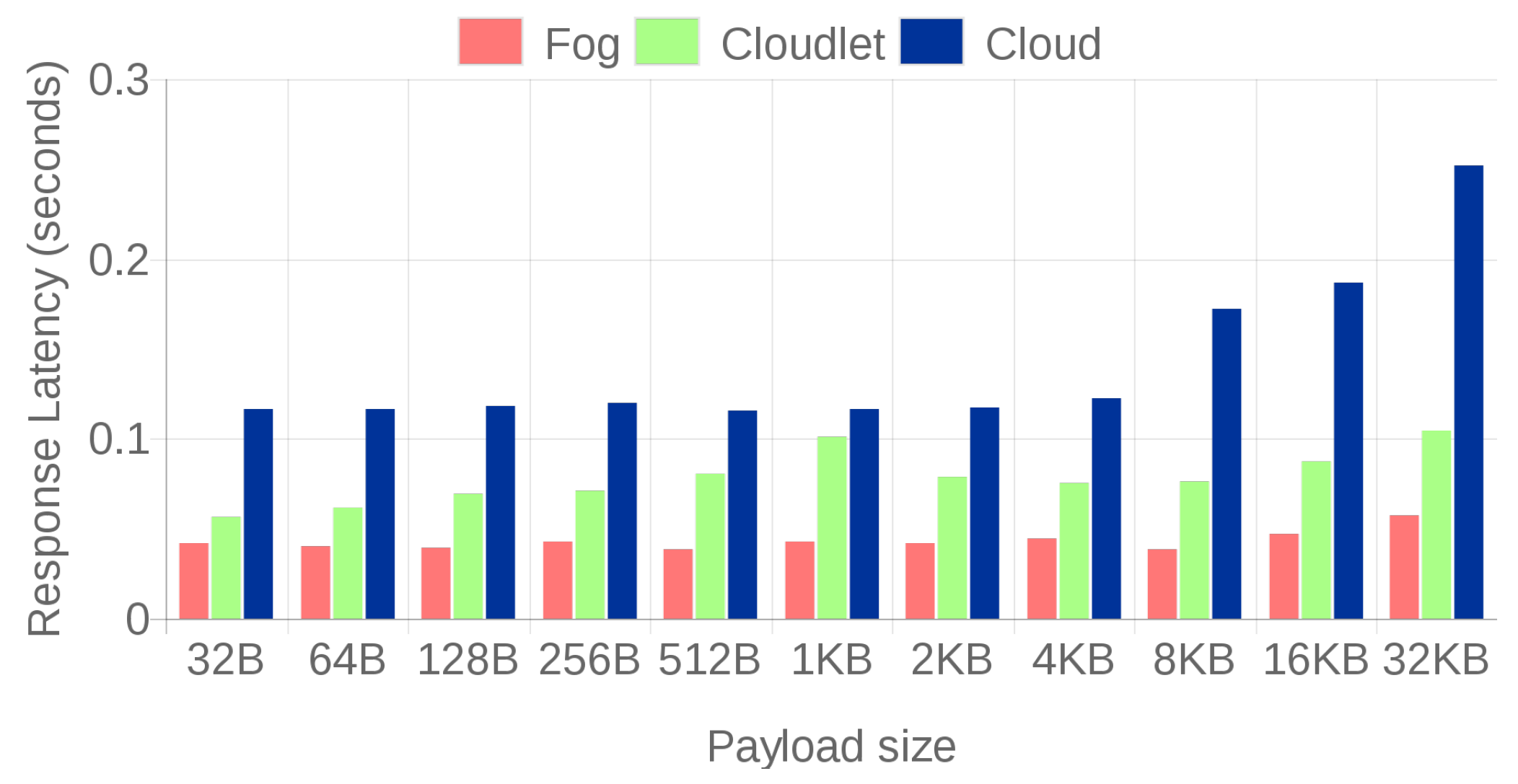
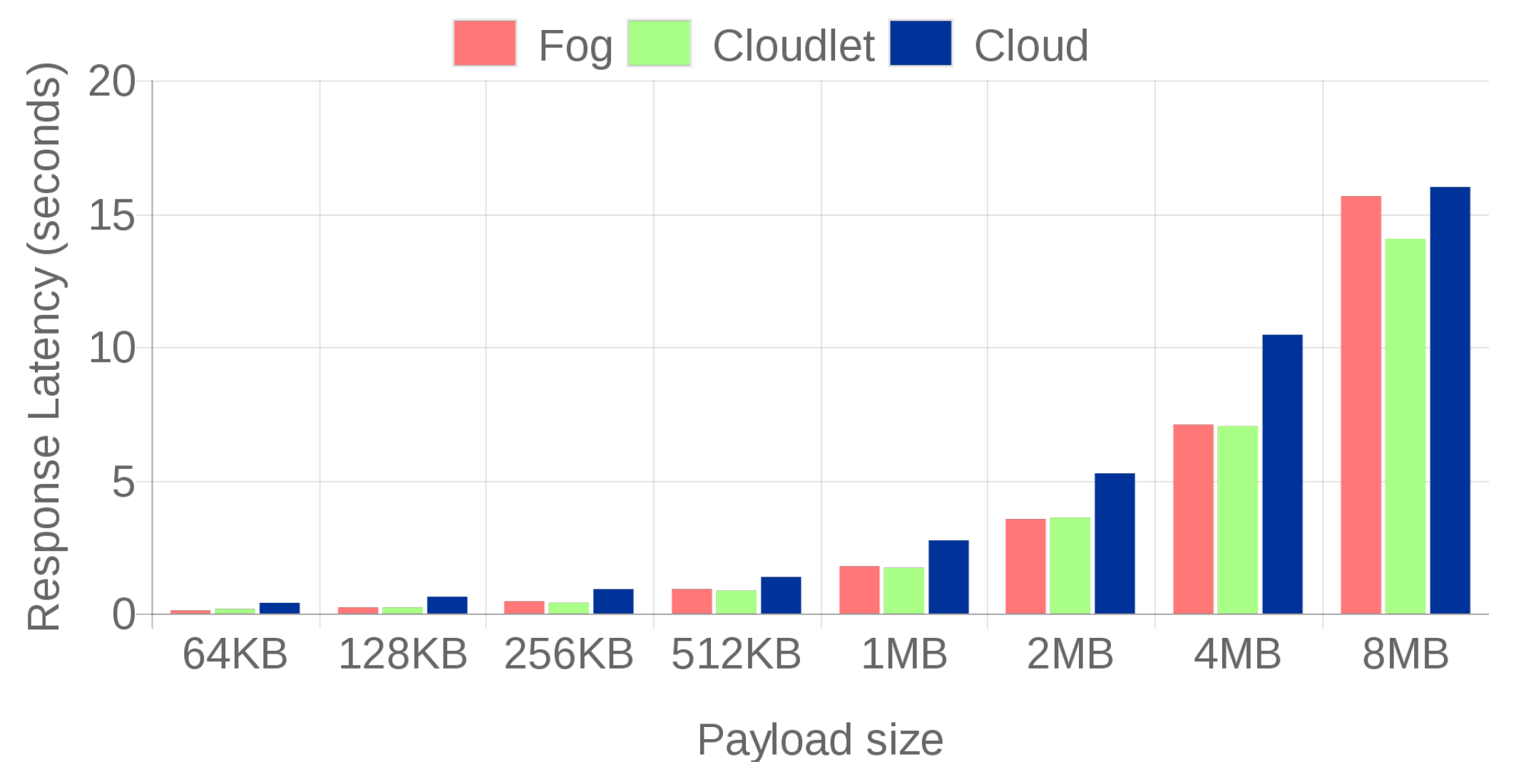
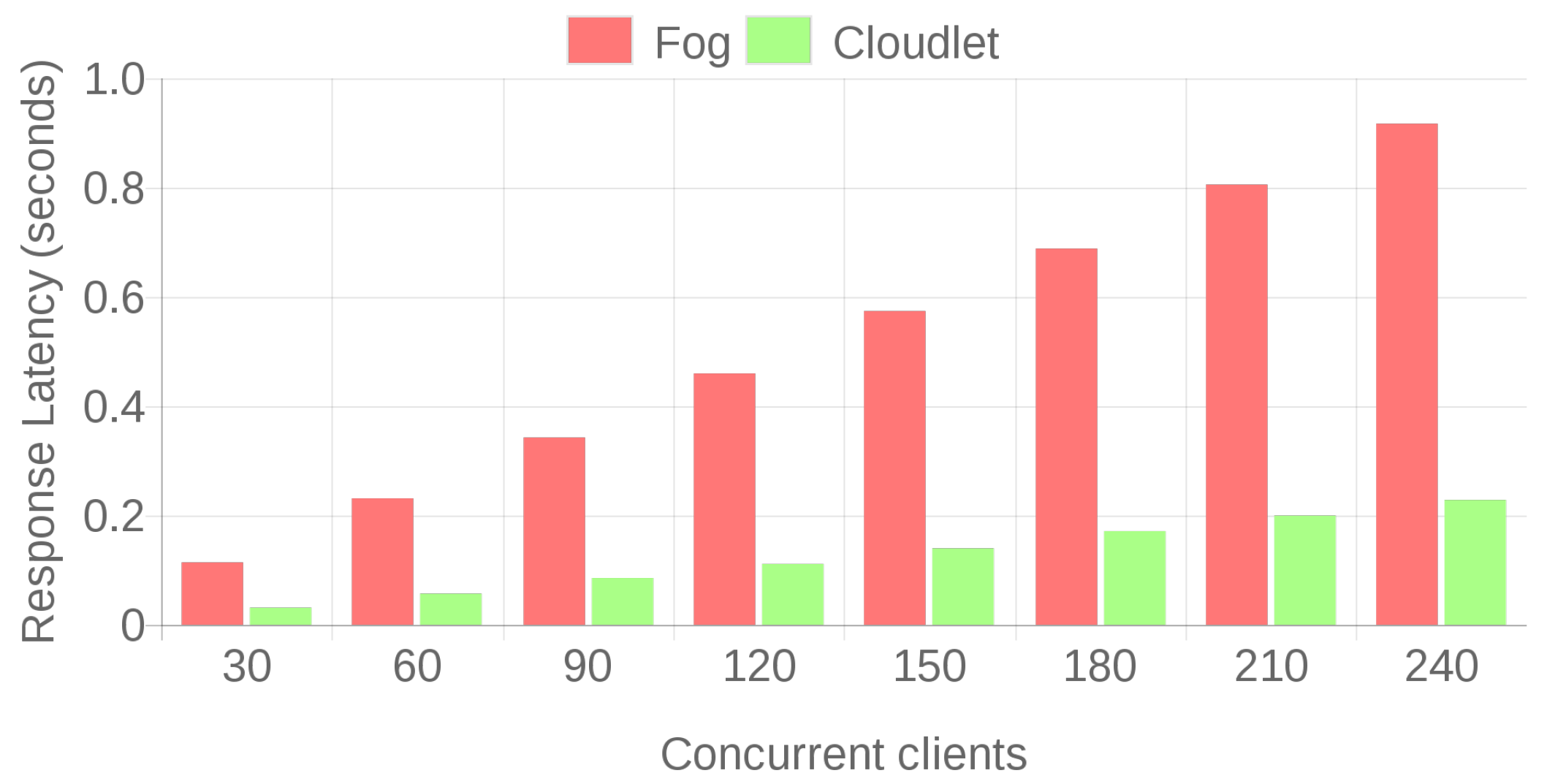
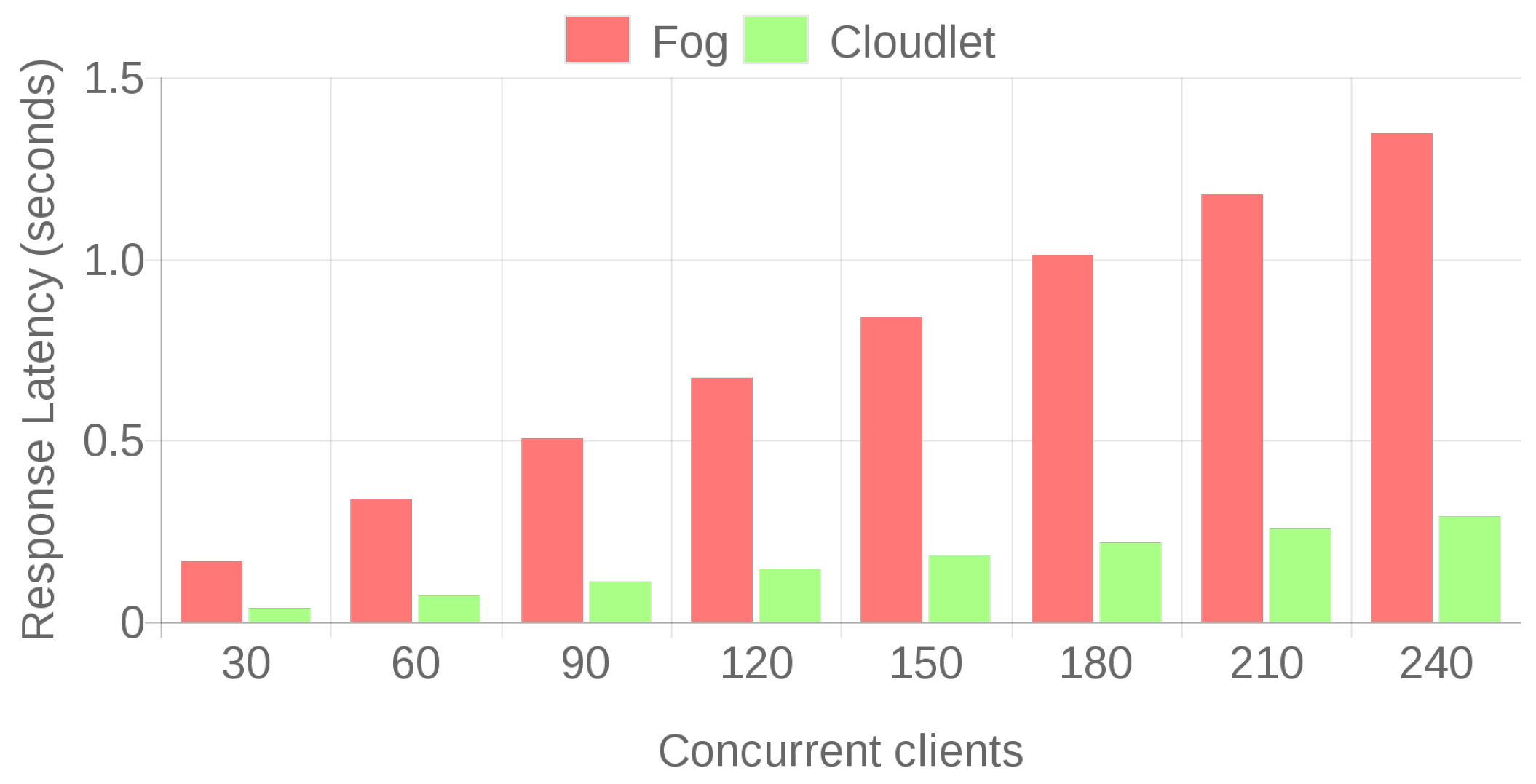
4.2. Response Latency Comparison
4.3. Sample Processing Rates under High Loads
4.4. Key Findings
- When a single IAR device operates in a specific shipyard area, for files of up to 128 KB, fog gateways respond faster despite being less powerful, cheaper and less energy demanding than a cloud or than the typical high-end PC used by a cloudlet.
- In the case of exchanging large files, the cloudlet-based solution is the fastest of the three tested architectures. However, in some scenarios it might be less expensive to make use of fog computing and SBCs, which are slightly slower, but cheaper in terms of acquisition cost and energy consumption.
- When a relevant number of IAR devices transmit concurrently, a cloudlet responds faster than a remote cloud or a fog gateway.
- Although, in general, the smartglasses were easy to adjust to the worker head, in some specific cases it took time to find the right position to align the operator’s sight with the display.
- In certain areas of the shipyard where helmets were required, it was difficult for the operator to wear both the HoloLens and the safety helmet at the same time. Therefore, future IAR devices should take safety procedures into account.
- Since virtual and real objects live together under the operators point of view, it is possible that certain virtual objects may hide relevant events of the real world. Although operators can move most virtual objects around the working environment, occlusions have to be prevented as much as possible in order to avoid possible accidents.
- Although the operators did not complain about the comfort of the smartglasses, after using them for a certain time (around an hour), the users had use marks on their noses due to pressure. There were no complaints about headaches, nausea or loss of visual acuity.
- The system was not tested during a whole working shift (around eight hours), but at certain production stages for less than two hours in total, since that is how long the batteries lasted. Therefore, future IAR devices would have to extend battery life, while preserving a light weight.
- Despite HoloLens’ excellent performance for tracking objects, note that their memory is limited, which implies that they can only map a limited area. Such an area is related to the size of the triangle mesh created by the smartglasses. In the experiments performed inside large workshops, the mesh reached roughly 600,000 triangles and the tested apps kept on working flawlessly. However, it is important to emphasize that the number of triangles depends highly on the scenario, so a large and complex environment like a shipyard cannot be mapped directly into the HoloLens’ memory. Nonetheless, it is worth noting that most shipyard operators work in very specific areas (i.e., their work is performed in a certain area of a workshop) and that, in the case of requiring to map large areas, it is possible to make use of spatial-mapping mesh-caching techniques to load content dynamically from the fog computing or cloud system depending on the detected area.
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| AR | Augmented Reality |
| ERP | Enterprise Resource Planning |
| HMD | Head-Mounted Display |
| IAR | Industrial Augmented Reality |
| IIoT | Industrial Internet of Things |
| IMU | Inertial Measurement Unit |
| MES | Manufacturing Execution System |
| PLM | Product Life-cycle Management |
| RFID | Radio Frequency IDentification |
| SBC | Single Board Computer |
| SoC | System-on-Chip |
References
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Castedo, L. Towards the Internet of Smart Trains: A Review on Industrial IoT-Connected Railways. Sensors 2017, 17, 1457. [Google Scholar] [CrossRef] [PubMed]
- Qi, Q.; Tao, F. Digital Twin and Big Data Towards Smart Manufacturing and Industry 4.0: 360 Degree Comparison. IEEE Access 2018, 6, 3585–3593. [Google Scholar] [CrossRef]
- Robla-Gómez, S.; Becerra, V.M.; Llata, J.R.; González-Sarabia, E.; Torre-Ferrero, C.; Pérez-Oria, J. Working Together: A Review on Safe Human-Robot Collaboration in Industrial Environments. IEEE Access 2017, 5, 26754–26773. [Google Scholar] [CrossRef]
- Fernández-Caramés, T.M.; Fraga-Lamas, P. A Review on Human-Centered IoT-Connected Smart Labels for the Industry 4.0. IEEE Access 2018. accepted. [Google Scholar] [CrossRef]
- Hernández-Rojas, D.L.; Fernández-Caramés, T.M.; Fraga-Lamas, P.; Escudero, C.J. Design and Practical Evaluation of a Family of Lightweight Protocols for Heterogeneous Sensing through BLE Beacons in IoT Telemetry Applications. Sensors 2018, 18, 57. [Google Scholar] [CrossRef] [PubMed]
- Fraga-Lamas, P. Enabling Technologies and Cyber-Physical Systems for Mission-Critical Scenarios. May 2017. Available online: http://hdl.handle.net/2183/19143 (accessed on 1 May 2018).
- Blanco-Novoa, O.; Fernández-Caramés, T.M.; Fraga-Lamas, P.; Castedo, L. An Electricity-Price Aware Open-Source Smart Socket for the Internet of Energy. Sensors 2017, 17, 643. [Google Scholar] [CrossRef] [PubMed]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Suárez-Albela, M.; Castedo, L.; González-López, M. A Review on Internet of Things for Defense and Public Safety. Sensors 2016, 16, 1644. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Caramés, T.M.; Fraga-Lamas, P.; Suárez-Albela, M.; Castedo, L. A Methodology for Evaluating Security in Commercial RFID Systems, Radio Frequency Identification. In Radio Frequency Identification, 1st ed.; Crepaldi, P.C., Pimenta, T.C., Eds.; INTECH: Rijeka, Croatia, 2016. [Google Scholar]
- Sutherland, I.E. The Ultimate Display. In Proceedings of the IFIP 65, New York, NY, USA, 24–29 May 1965; pp. 506–508. [Google Scholar]
- Sutherland, I.E. A head-mounted three dimensional display. In Proceedings of the AFIPS 68, San Francisco, CA, USA, 9–11 December 1968; pp. 757–764. [Google Scholar]
- Azuma, R.T. A survey of augmented reality. Presence Teleoperators Virtual Environ. 1997, 6, 355–385. [Google Scholar] [CrossRef]
- Wohlgemuth, W.; Triebfürst, G. ARVIKA: Augmented Reality for development, production and service. In Proceedings of the DARE 2000, Elsinore, Denmark, 12–14 April 2000; pp. 151–152. [Google Scholar]
- Friedrich, W. ARVIKA-Augmented Reality for Development, Production and Service. In Proceedings of the International Symposium on Mixed and Augmented Reality, Darmstadt, Germany, 1 October 2002; pp. 3–4. [Google Scholar]
- Navab, N. Developing Killer Apps for Industrial Augmented Reality. IEEE Comput. Graph. Appl. 2004, 24, 16–20. [Google Scholar] [CrossRef] [PubMed]
- Novak-Marcincin, J.; Barna, J.; Janak, M.; Novakova-Marcincinova, L.; Torok, J. Visualization of intelligent assembling process by augmented reality tools application. In Proceedings of the 14th IEEE International Symposium on Logistics and Industrial Informatics, Smolenice, Slovakia, 5–7 September 2012; pp. 33–36. [Google Scholar]
- Li, G.; Xi, N.; Chen, H.; Saeed, A. Augmented reality enhanced “top-down” nano-manufacturing. In Proceedings of the 4th IEEE Conference on Nanotechnology, Munich, Germany, 16–19 August 2004; pp. 352–354. [Google Scholar]
- Fruend, J.; Grafe, M.; Matysczok, C.; Vienenkoetter, A. AR-based product design in automobile industry. In Proceedings of the First IEEE International Workshop Augmented Reality Toolkit, Darmstadt, Germany, 29 September 2002. [Google Scholar]
- Gausenmeier, J.; Matysczok, C.; Radkowski, R. AR-based modular construction system for automobile advance development. In Proceedings of the IEEE International Augmented Reality Toolkit Workshop, Tokyo, Japan, 7 October 2003. [Google Scholar]
- Park, H.S.; Choi, H.W.; Park, J.W. Augmented Reality based Cockpit Module Assembly System. In Proceedings of the International Conference on Smart Manufacturing Application, Gyeonggi-do, South Korea, 9–11 April 2008; pp. 130–135. [Google Scholar]
- Arumugam, D.D.; Engels, D.W. Characterization of RF Propagation in Helical and Toroidal Metal Pipes for Passive RFID Systems. In Proceedings of the IEEE International Conference on RFID, Las Vegas, NV, USA, 16–17 April 2008; pp. 269–276. [Google Scholar]
- Wong, S.F.; Zheng, Y. The effect of metal noise factor to RFID location system. In Proceedings of the IEEE International Conference on Industrial Engineering and Engineering Management, Bangkok, Thailand, 10–13 December 2013; pp. 310–314. [Google Scholar]
- Mocanu, B.; Tapu, R.; Petrescu, T.; Tapu, E. A experimental evaluation of 3D mesh decimation techniques. In Proceedings of the International Symposium on Signals, Circuits and Systems, Lasi, Romania, 30 June–1 July 2011; pp. 1–4. [Google Scholar]
- Ma, T.; Gong, G.; Yan, J. A 3D model simplification algorithm based on edge-collapse. In Proceedings of the IEEE 10th International Conference on Industrial Informatics, Beijing, China, 13 September 2012; pp. 776–779. [Google Scholar]
- Ng, K.W.; Low, Z.W. Simplification of 3D Triangular Mesh for Level of Detail Computation. In Proceedings of the 11th International Conference on Computer Graphics, Imaging and Visualization, Singapore, 23 October 2014; pp. 11–16. [Google Scholar]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepalli, S. Fog Computing and its Role in the Internet of Things. In Proceedings of the First Edition of the MCC Workshop on Mobile Cloud Computing, Helsinki, Finland, 17 August 2012; pp. 13–16. [Google Scholar]
- Suárez-Albela, M.; Fernández-Caramés, T.M.; Fraga-Lamas, P.; Castedo, L. A Practical Evaluation of a High-Security Energy-Efficient Gateway for IoT Fog Computing Applications. Sensors 2017, 17, 1978. [Google Scholar] [CrossRef] [PubMed]
- Dolui, K.; Datta, S.K. Comparison of edge computing implementations: Fog computing, cloudlet and mobile edge computing. In Proceedings of the Global Internet of Things Summit (GIoTS), Geneva, Switzerland, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Microsoft HoloLens Official Web Page. Available online: https://www.microsoft.com/en-us/hololens (accessed on 1 May 2018).
- Augmented Reality Systems Set to Revolutionise Battlefield Operations. Available online: https://www.baesystems.com/en/article/augmented-reality-systems-set-to-revolutionise-battlefield-operations (accessed on 1 May 2018).
- BAE Systems Unveils Latest Wearable Display Technology at DSEI. Available online: https://www.baesystems.com/en-uk/article/bae-systems-unveils-latest-wearable-display-technology-at-dsei (accessed on 1 May 2018).
- Virtual Reality Technology Transforms Design of UK Warships. Available online: http://www.baesystems.com/en/article/virtual-reality-technology-transforms-design-of-uk-warships (accessed on 1 May 2018).
- Index AR Solutions Official Web Page. Available online: https://www.indexarsolutions.com/about-us (accessed on 1 May 2018).
- Newport News Shipbuilding Official Web Page. Available online: http://nns.huntingtoningalls.com/ar (accessed on 1 May 2018 ).
- Mizell, D.W. Virtual Reality and Augmented Reality in Aircraft Design and Manufacturing. In Proceedings of the WESCON/94, Anaheim, CA, USA, 27–29 September 1994. [Google Scholar]
- Aiteanu, D.; Hillers, B.; Graser, A. A step forward in manual welding: demonstration of augmented reality helmet. In Proceedings of the Second IEEE and ACM International Symposium on Mixed and Augmented Reality, Tokyo, Japan, 10 October 2003; pp. 309–310. [Google Scholar]
- Andersen, R.S.; Bøgh, S.; Moeslund, T.B.; Madsen, O. Task space HRI for cooperative mobile robots in fit-out operations inside ship superstructures. In Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 880–887. [Google Scholar]
- Fast, K.; Gifford, T.; Yancey, R. Virtual training for welding. In Proceedings of the third IEEE and ACM International Symposium on Mixed and Augmented Reality, Arlington, VA, USA, 5 November 2005; pp. 298–299. [Google Scholar]
- Olbrich, M.; Wuest, H.; Riess, P.; Bockholt, U. Augmented reality pipe layout planning in the shipbuilding industry. In Proceedings of the 10th IEEE International Symposium on Mixed and Augmented Reality, Basel, Switzerland, 26–29 October 2011; pp. 269–270. [Google Scholar]
- Havard, V.; Baudry, D.; Louis, A.; Mazari, B. Augmented reality maintenance demonstrator and associated modelling. In Proceedings of the IEEE Virtual Reality (VR), Arles, France, 23–27 March 2015; pp. 329–330. [Google Scholar]
- Goode, O.R.; Dallinger, J.F. Quality control in shipbuilding. Naval Eng. J. 1964, 76, 397–407. [Google Scholar] [CrossRef]
- Loch, F.; Quint, F.; Brishtel, I. Comparing Video and Augmented Reality Assistance in Manual Assembly. In Proceedings of the 12th International Conference on Intelligent Environments (IE), London, UK, 14–16 September 2016; pp. 147–150. [Google Scholar]
- Fraga-Lamas, P.; Noceda-Davila, D.; Fernández-Caramés, T.M.; Díaz-Bouza, M.A.; Vilar-Montesinos, M. Smart Pipe System for a Shipyard 4.0. Sensors 2016, 16, 2186. [Google Scholar] [CrossRef] [PubMed]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Noceda-Davila, D.; Vilar-Montesinos, M. RSS Stabilization Techniques for a real-time passive UHF RFID Pipe Monitoring System for Smart Shipyards. In Proceedings of the IEEE International Conference on RFID, Phoenix, AZ, USA, 9–11 May 2017; pp. 161–166. [Google Scholar]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Noceda-Davila, D.; Díaz-Bouza, M.; Vilar-Montesinos, M.; Pena-Agras, J.D.; Castedo, L. Enabling automatic event detection for the pipe workshop of the shipyard 4.0. In Proceedings of the 2017 56th FITCE Congress, Madrid, Spain, 14–15 September 2017; pp. 20–27. [Google Scholar]
- Narzt, W.; Pomberger, G.; Ferscha, A.; Kolb, D.; Müller, R.; Wieghardt, J.; Hörtner, H.; Lindinger, C. Augmented reality navigation systems. Univers. Access Inf. Soc. 2005, 4, 177–187. [Google Scholar] [CrossRef]
- Kalkofen, D.; Veas, E.; Zollmann, S.; Steinberger, M.; Schmalstieg, D. Adaptive ghosted views for Augmented Reality. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Adelaide, Australia, 1–4 October 2013; pp. 1–9. [Google Scholar]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Blanco-Novoa, Ó.; Vilar-Montesinos, M.A. A Review on Industrial Augmented Reality Systems for the Industry 4.0 Shipyard. IEEE Access 2018, 6, 13358–13375. [Google Scholar] [CrossRef]
- Berning, M.; Riedel, T.; Karl, D.; Schandinat, F.; Beigl, M.; Fantana, N. Augmented service in the factory of the future. In Proceedings of the International Conference on Networked Sensing (INSS), Antwerp, Belgium, 11–14 June 2012; pp. 1–2. [Google Scholar]
- Cordonnier, M.; Martino, S.; Boisseau, C.; Paslier, S.; Recapet, J.-P.; Blanc, F.; Augustin, B. Contribution of augmented reality to the maintenance of network equipment. Open Access Proc. J. 2017, 2017, 87–90. [Google Scholar] [CrossRef]
- Smparounis, K.; Mavrikios, D.; Pappas, M.; Xanthakis, V.; Viganó, G.P.; Pentenrieder, K. A virtual and augmented reality approach to collaborative product design and demonstration. In Proceedings of the IEEE International Technology Management Conference (ICE), Lisbon, Portugal, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Flatt, H.; Koch, N.; Röcker, C.; Günter, A.; Jasperneite, J. A context-aware assistance system for maintenance applications in smart factories based on augmented reality and indoor localization. In Proceedings of the IEEE 20th Conference on Emerging Technologies Factory Automation (ETFA), Luxembourg, 8–11 September 2015; pp. 1–4. [Google Scholar]
- Rao, Q.; Grünler, C.; Hammori, M.; Chakrabort, S. Design methods for augmented reality in-vehicle infotainment systems. In Proceedings of the 51st ACM/EDAC/IEEE Design Automation Conference (DAC), San Francisco, CA, USA, 1–5 June 2014; pp. 1–6. [Google Scholar]
- Schroeder, G.; Steinmetz, C.; Pereira, C.E. Visualising the digital twin using web services and augmented reality. In Proceedings of the 14th IEEE International Conference on Industrial Informatics (INDIN), Poitiers, France, 19–21 July 2016; pp. 522–527. [Google Scholar]
- Schneider, M.; Rambach, J.; Stricker, D. Augmented reality based on edge computing using the example of remote live support. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Toronto, ON, Canada, 22–25 March 2017; pp. 1277–1282. [Google Scholar]
- Blanco-Novoa, Ó.; Fernández-Caramés, T.M.; Fraga-Lamas, P.; Vilar-Montesinos, M.A. A Practical Evaluation of Commercial Industrial Augmented Reality Systems in an Industry 4.0 Shipyard. IEEE Access 2018, 6, 8201–8218. [Google Scholar] [CrossRef]
- SAP Official Web Page. Available online: https://www.sap.com (accessed on 1 May 2018).
- Windchill Official Web Page. Available online: https://www.ptc.com/en/products/plm/plm-products/windchill (accessed on 1 May 2018).
- FORAN Official Web Page. Available online: http://www.marine.sener/foran (accessed on 1 May 2018).
- ThingWorx Official Web Page. Available online: https://www.ptc.com/en/products/iot (accessed on 1 May 2018).
- Epson Moverio Glasses Official Web Page. Available online: https://epson.com/moverio-augmented-reality (accessed on 1 May 2018).
- ODG R-7 glasses official web page. Available online: https://www.osterhoutgroup.com/r-7-glasses-system.html (accessed on 1 May 2018).
- Vuzix Glasses Official Web Page. Available online: https://www.vuzix.com/Business-and-Enterprise-Solutions (accessed on 1 May 2018).
- Daqri Smarthelmet Glasses Official Web Page. Available online: https://daqri.com/products/smart-helmet (accessed on 1 May 2018).
- Fujitsu Ubiquitousware HMD Official Web Page. Available online: http://www.fujitsu.com/fts/products/computing/peripheral/wearables/hmd-iot001/ (accessed on 1 May 2018).
- ARToolKit Official Web Page. Available online: https://artoolkit.org (accessed on 1 May 2018).
- Mixare Official Web Page. Available online: http://www.mixare.org (accessed on 1 May 2018).
- Vuforia Official Web Page. Available online: https://www.vuforia.com (accessed on 1 May 2018).
- Wikitude Official Web Page. Available online: https://www.wikitude.com (accessed on 1 May 2018).
- Blender Official Website. Available online: https://www.blender.org (accessed on 1 May 2018).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach/File Size | 4 MB | 8 MB |
|---|---|---|
| Cloudlet | 100% | 100% |
| Fog | 100% | 47.8% |
| Cloud | 96.5% | 32.1% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández-Caramés, T.M.; Fraga-Lamas, P.; Suárez-Albela, M.; Vilar-Montesinos, M. A Fog Computing and Cloudlet Based Augmented Reality System for the Industry 4.0 Shipyard. Sensors 2018, 18, 1798. https://doi.org/10.3390/s18061798
Fernández-Caramés TM, Fraga-Lamas P, Suárez-Albela M, Vilar-Montesinos M. A Fog Computing and Cloudlet Based Augmented Reality System for the Industry 4.0 Shipyard. Sensors. 2018; 18(6):1798. https://doi.org/10.3390/s18061798
Chicago/Turabian StyleFernández-Caramés, Tiago M., Paula Fraga-Lamas, Manuel Suárez-Albela, and Miguel Vilar-Montesinos. 2018. "A Fog Computing and Cloudlet Based Augmented Reality System for the Industry 4.0 Shipyard" Sensors 18, no. 6: 1798. https://doi.org/10.3390/s18061798
APA StyleFernández-Caramés, T. M., Fraga-Lamas, P., Suárez-Albela, M., & Vilar-Montesinos, M. (2018). A Fog Computing and Cloudlet Based Augmented Reality System for the Industry 4.0 Shipyard. Sensors, 18(6), 1798. https://doi.org/10.3390/s18061798