1. Introduction
Pressure is an essential parameter for the normal function of almost all organs in the human body. Deviation of pressure out of range for physiological function may result in injury or deteriorating organ function. As such, measurement of pressure is highly important in clinical practice and medical research. Pressures in the circulatory system, intraocular, urinary bladder, gastrointestinal tract, muscle compartments, and joints are some examples of pressures being routinely measured. Although the target organ may have a “slow physiological response”, any patient movement may influence measurements significantly. Therefore, the most precise measurements are currently done invasively and stationary, that is, with the patient supine. Examples are measurements of cardiac-, intracranial-, and bladder- pressures.
In clinical practice, pressures are often measured indirectly through a fluid line where pressure is transmitted from the organ of interest to a remote, externally localized transducer. Transmission through a fluid line represents a delay in the measurements. Pressure measurement through a fluid column is also prone to artefacts from patient movement. Both due to patient comfort and risk of infections, the pressure examination is mostly limited to a short period of time, for example, during or after surgery, and only instantaneous values are recorded. Therefore, conventional pressure measurement methods represent only the best achievable measure of the patient’s condition.
To reveal the exact organ condition, continuous organ monitoring ideally lasting for days, weeks, or years is needed. Such monitoring allows for not only real-time measurements, but also for personalized medical treatment. Combined with alarms being activated when measured values exceed a certain limit, organ monitoring on a continuous base can render possible new health services and thereby increase patient empowerment and the quality of life. One premise is that the patient must have the possibility to move and keep up normal activities during the measurement period, that is, the measurement method should not be vulnerable to patient movements or other artefacts. Small-sized, lightweight, and energy-efficient Micro Electro Mechanical Systems (MEMS) combined with a minimally invasive method may represent a solution to this. Although research on permanently implantable sensors for the monitoring of bodily pressure has been conducted for decades [
1,
2,
3], more research is still needed. Immunologic responses to the implant size, structure, and material, combined with individual immune systems, represent serious hindrances for the success. In vivo pressure measurements are particularly demanding, as contact (direct or indirect) between the pressurizing medium and the sensor is required. In general, any foreign implant is at risk of being encapsulated in fibrous tissue, or “scar tissue”. For an implanted sensor, sensor drift and, in the end, sensor failure might be the result. Additionally, corrosion caused by aggressive body fluids may alter the sensor characteristics and thereby sensor stability and again result in sensor failure. To our knowledge, only one implantable pressure sensor for long-term use has been launched in the market [
4].
One patient group that can benefit from continuous organ monitoring, with or without alarm capabilities, is those who are suffering from a dysfunctional urinary bladder. Voiding dysfunction, for example, urgency and incontinence, are common symptoms in the general population. Urinary incontinence occurs in approximately 10% of the male population [
5]. In a Norwegian study, approximately one out of four reported some problems with incontinence [
6]. The severity varied, but as many as 7% reported incontinence as a considerable problem. The consequences can be disabling medically, physically, and socially. There are several options available for treating these consequences like medication, assistive devices, or surgery. The management of voiding dysfunction requires careful assessment of how the bladder is responding during filling and emptying, and recording bladder pressure is essential. Measurement of bladder pressure, in medical terms known as cystometry, is the method by which the storage function of the lower urinary tract is measured during the filling of the bladder. Cystometry is, in general, regarded as the “golden standard” for assessment of lower urinary tract dysfunction by the International Continence Society (ICS) [
7]. However, there is a large variation in the clinical use of cystometric examinations. Access to equipment, financial resources, and existing routines in clinical practice are important factors. Based on the prevalence in Norway [
5], and expected to be also valid for other western countries, there is a need for about 2000 examinations per million inhabitants annually.
The cystometric procedure requires a specialized laboratory and is performed by skilled health personnel. The conventional method involves placement of a catheter through the urethra into the bladder, with a transducer in the distal end. The reference pressure is usually recorded in the rectum. Both target pressure and reference pressure are recorded through water-filled lines (
Figure 1). In conventional cystometry, the patients will need to sit or lie down in a laboratory, and the bladder is artificially filled using a pump. The conventional cystometry is done with non-physiological filling rates and urethra obstructed by a catheter. It is also prone to artefacts caused by movements and measurement errors [
8].
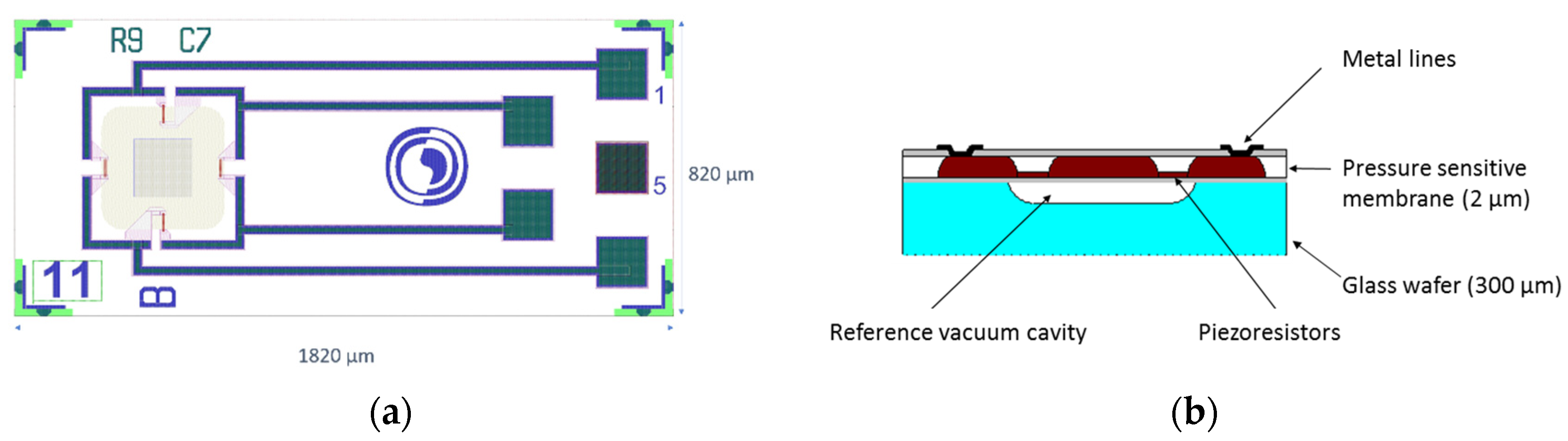
Through a multidisciplinary approach, SINTEF Digital and Sunnaas Rehabilitation Hospital have over the past five years developed a new in-target organ pressure sensor system for cystometry [
9,
10]. The new sensor system is based on Micro Electro Mechanical Systems (MEMS) technology and allows for a suprapubic application of sensors in an ambulatory patient.
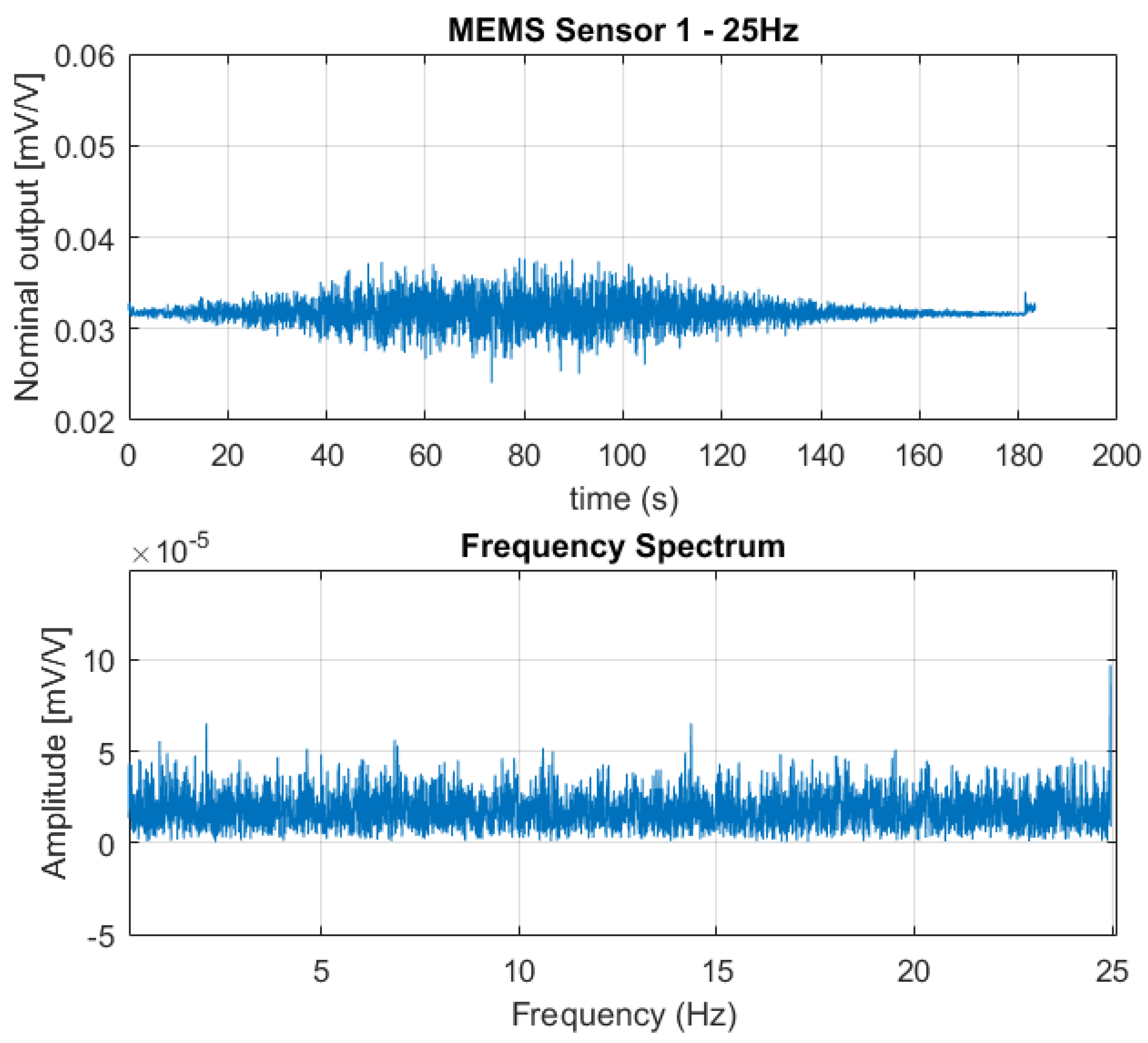
In this paper, we present results from an in vitro bench study comparing the characteristics of the new MEMS-based sensor system with a conventional system using water-filled lines. Robustness to measurement errors due to movements was investigated through response to forced vibrations, as a superior response to rapid pressure changes will improve the quality of a recording.
4. Discussion
In our study, we compared the characteristics of a novel cystometry system using in-target organ sensor with a conventional system using water-filled lines. While the MEMS-based sensor system recorded real changes in applied pressure for excitation frequencies ranging from 5 Hz to 25 Hz, such small and high-frequency stimuli were not transmitted through the water-filled lines connected to the external transducers.
There is an obvious difference between the sensor systems: The in-target organ sensor is a microsensor with minute mass displacement versus approximately 2.5 m of water-filled line. Even though the water-filled line is pressurized to 300 mg Hg to improve pressure transmission, small pressure changes with frequencies of 5 Hz or above cannot be transmitted. The study was done with the length of water-filled lines as provided for clinical use by the supplier. Shorter lines could be expected to result in improved frequency response and should be addressed in future studies.
The urinary bladder is located inside the abdominal wall. The pressure during a bladder contraction results in modest increases, physiologically in the range 0–40 mbar. However, pressure is also exerted by the abdominal wall by movement or muscle contraction. To determine the detrusor pressure (
Pdet), i.e., the pressure exerted by the bladder itself, the abdominal pressure needs to be subtracted from the pressure recorded inside the bladder:
Figure 9 shows a curve during cystometry with all three parameters. In clinical practice, abdominal pressure is often recorded from the rectum. This is part of the gastrointestinal system, and in itself, a contractile organ. In many cases, this will cause significant artefacts in the determination of detrusor pressure. There are several devices on the market for ambulatory cystometry. According to our experience at the clinic, there are important limitations with this equipment when connected to water-filled lines. As shown in
Figure 9 the cystometry curve is difficult to interpret, even in an expanded graph, due to movement artefacts. This illustrates the fact that physiological characteristics of the target organ are not recorded, but the patient’s activities are.
According to the standards of International Continence Society (ICS), cystometry can be done with water-filled lines connected to an external pressure transducer [
7]. However, the importance of avoiding errors when using water-filled lines is well recognized [
16] and regarded as critical for patients by ICS’s basic training program [
8]. ICS acknowledges new microtip catheters and air-filled lines, and the fact that these methods have the advantage of no bubbles in the fluid system. Furthermore, that the results obtained from the different methods are not entirely identical. The standards, however, do not elaborate on other important aspects that may also influence the measurements.
A superior solution to avoid measurement artefacts is to place the abdominal (or reference) sensor into inert tissue in the prevesical space close to the bladder sensor. This will eliminate any artefact through smooth-muscle activity. However, the sensor must be inserted through the skin and into tissue inside the abdominal wall.
With an optimal placement, it is also crucial to have a sufficient synchronization of data sampling to obtain a correct real-time value. Movement or contraction of the abdominal muscles may cause rapid changes. Any delay in the sampling of the reference pressure could cause artefacts. Currently, a sampling rate of 8 Hz is standard in cystometry. However, achieving high-quality and high-resolution measurements may require far higher sampling rates. The technical and clinical implications of higher sampling rates need further studies.
Laws of fluid dynamics describe pressure transmission through a water-filled line. It is not within the scope of this paper to discuss a precise mathematical model, but rather to present some of the sources of error. Poiseuille’s equation gives the pressure drop (Δ
P) in an incompressible fluid through a long cylindrical pipe of constant cross-section:
where
L is the length of pipe,
μ is the the dynamic viscosity,
Q is the volumetric flow rate, and
R is the pipe radius. The equation is valid for laminar flow, which holds in our case with repeated flushing of the lines with approximately 2–3 mL/min and a rough estimate of Reynolds number below 100 (for the interested reader, we recommend further reading in scholarly articles on the science of fluid dynamics). In principle, the pressure-change from the target organ to the external transducer will depend on the length and radius of the line, as obvious from Equation (2). Thus theoretically, when length and radius of line approximates a critical unit, the external transducer will no longer be able to detect any pressure change. An air-filled catheter has been developed, which reduce dynamic viscosity significantly, but on the other side reduces transmission being a compressible substance.
Movement may cause artefact in water-filled lines through different mechanisms. Both gravity and horizontal movement in a mobile patient will induce acceleration or deceleration in the water column. The pressure exerted on the external transducer through these mechanisms will depend on the acceleration and mass of water in the line. Thus, the longer and the larger radius of line, the more errors.
The lines are made from flexible material, usually medical grade plastics. Elasticity in the lines will, to some extent, also dampen the pressure transmission. An elastic line will cause a higher loss of pressure from the target organ to external transducer than a stiffer. However, highly rigid lines will never be feasible in a clinical setting.
Bending and twisting the lines during movement will also cause errors. Firstly, this will change the diameter of the line and cause a loss of transmission from the target organ to the external transducer. In the extreme case of a complete bending of the line, pressure transmission will cease completely. Pressing the line will also cause displacement of water and an erroneous signal.
In our opinion, there are several practical and theoretically limitations in pressure measurement systems using water-filled lines. As our experiments demonstrate, in-target organ sensors have superior properties to measure high-frequency and low-pressure stimuli, which is an important feature for cancelling of measurements not being related to pressure changes but to movements. This will be a requirement to proceed with long-term implantable pressure measurement systems in the future.
In an ideal setting, measurements should be done non-invasively with small portable equipment, leaving the individual completely physically and mentally unaffected. However, non-invasive measurements often have low precision and many sources of error. Thus, obtaining high-quality measurements of pressure involves invasive procedures.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








