Benefits and Limitations of the Record and Replay Approach for GNSS Receiver Performance Assessment in Harsh Scenarios



Abstract
:1. Introduction
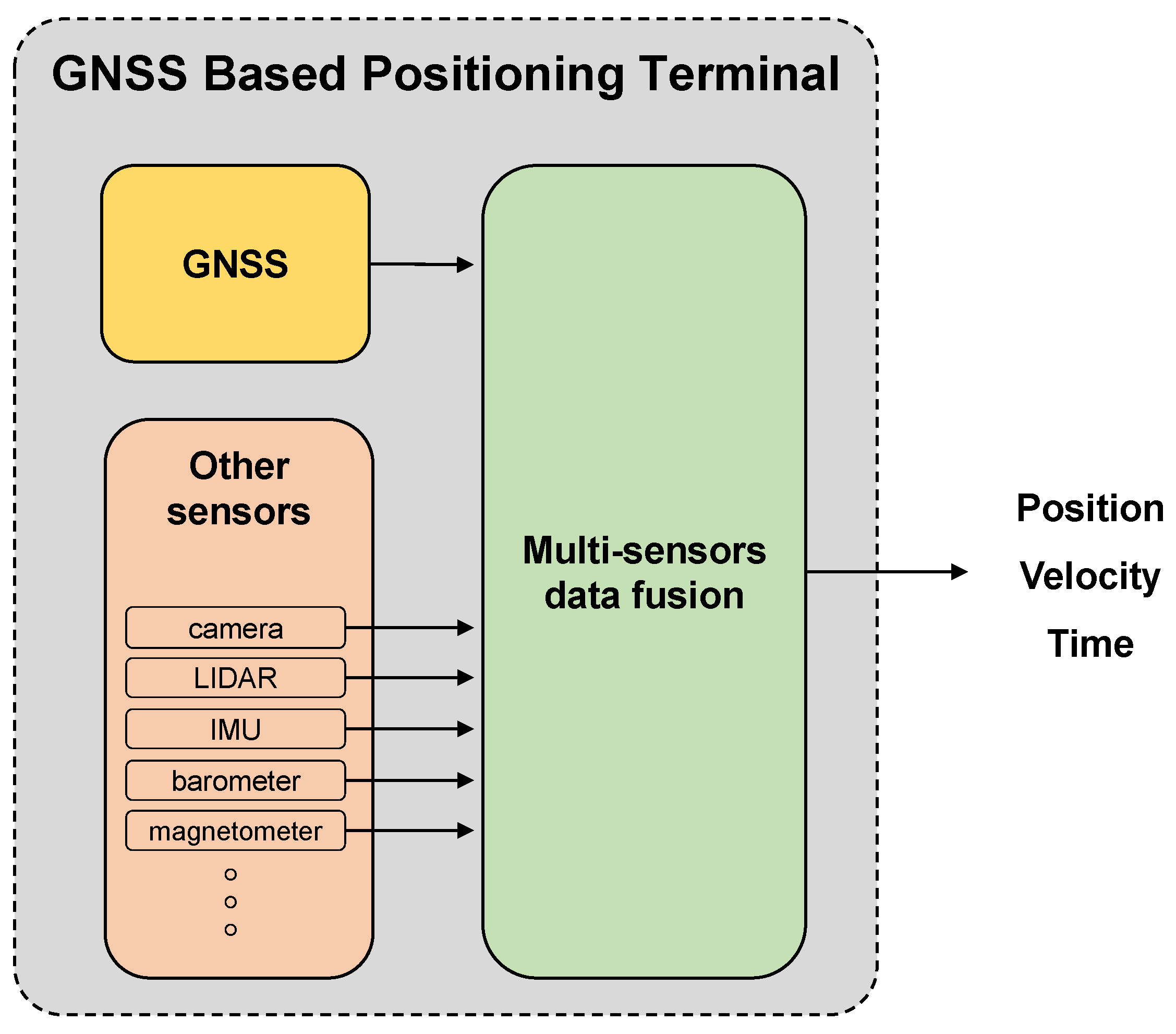
2. GNSS-Based Positioning Terminal for Road Applications
3. Test Procedures for GBPT Performance Assessment
3.1. Laboratory Tests
3.2. Field Tests
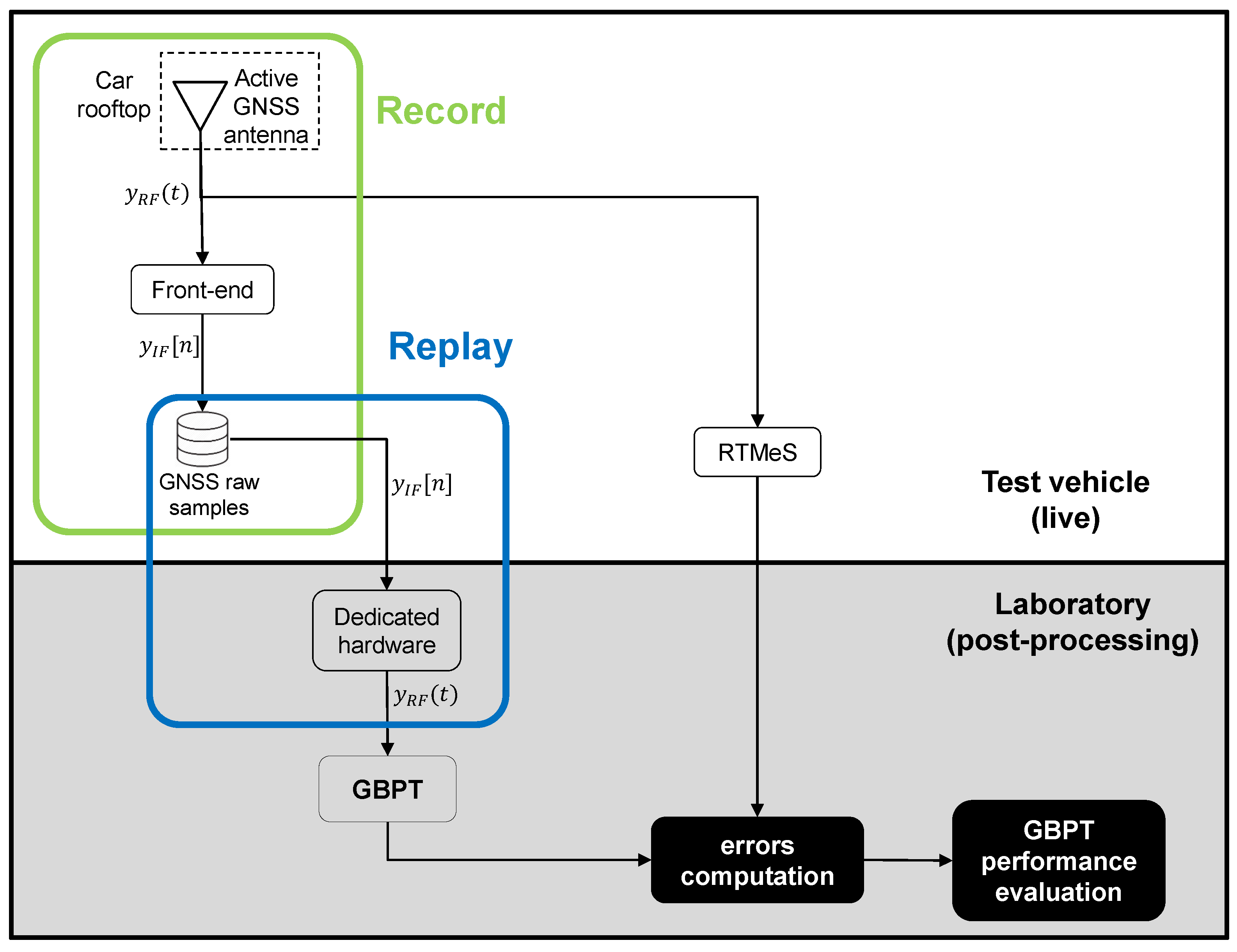
3.3. Record and Replay Tests
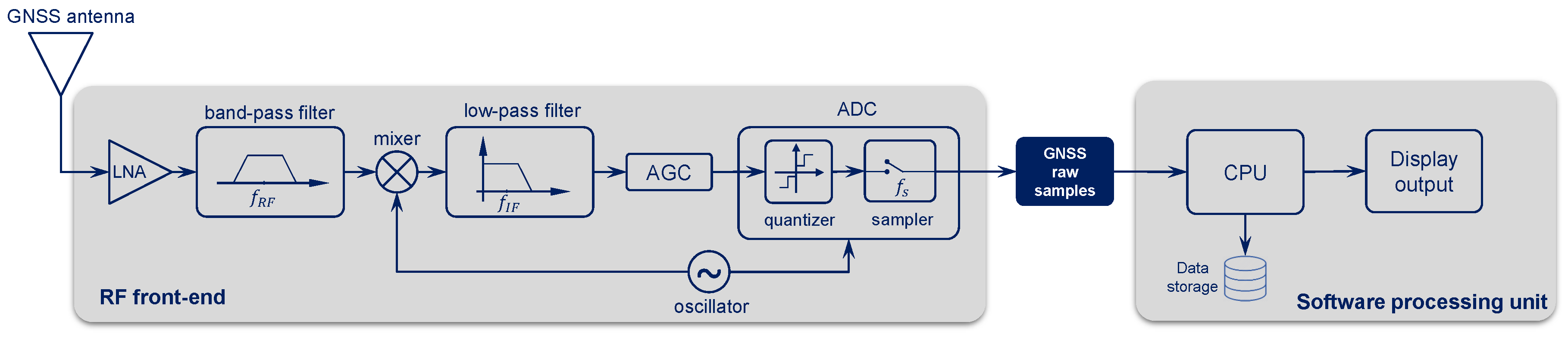
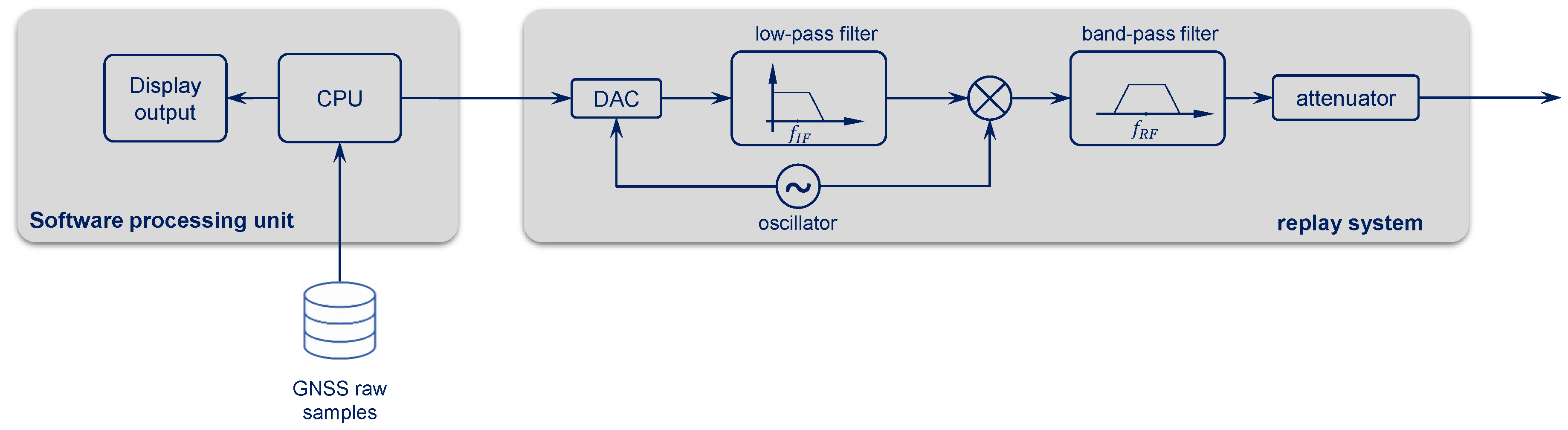
4. Test Record and Replay Approach
The Use of Record and Replay for GBPT Performance Assessment
5. Test Procedures Comparison
6. Performance Metrics for GBPTs
- and are the east coordinates estimated respectively by the receiver under test and the reference receiver, at a specific time instant;
- and are the north coordinates estimated respectively by the receiver under test and the reference receiver, at a specific time instant.
7. Experimental Results
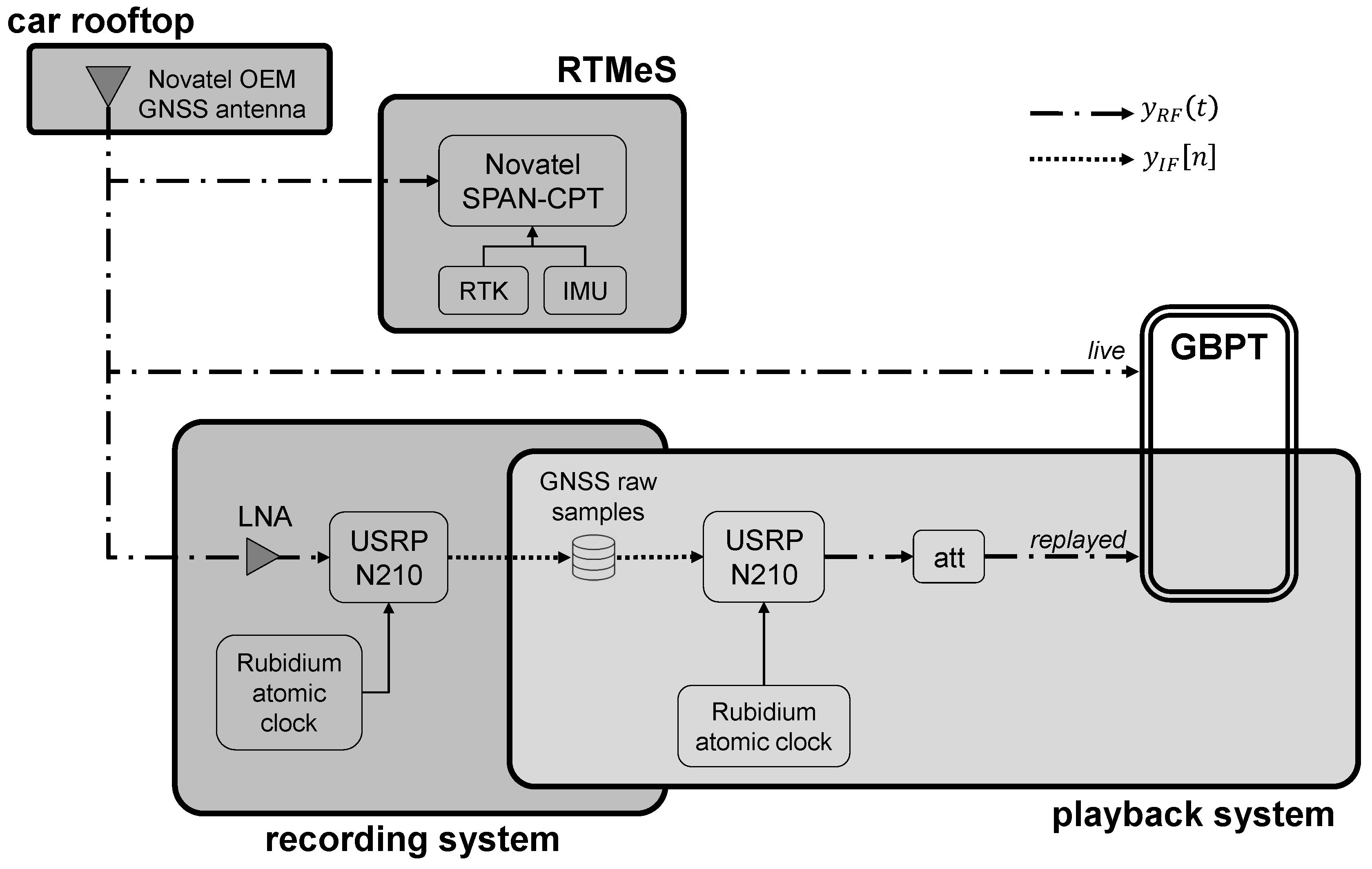
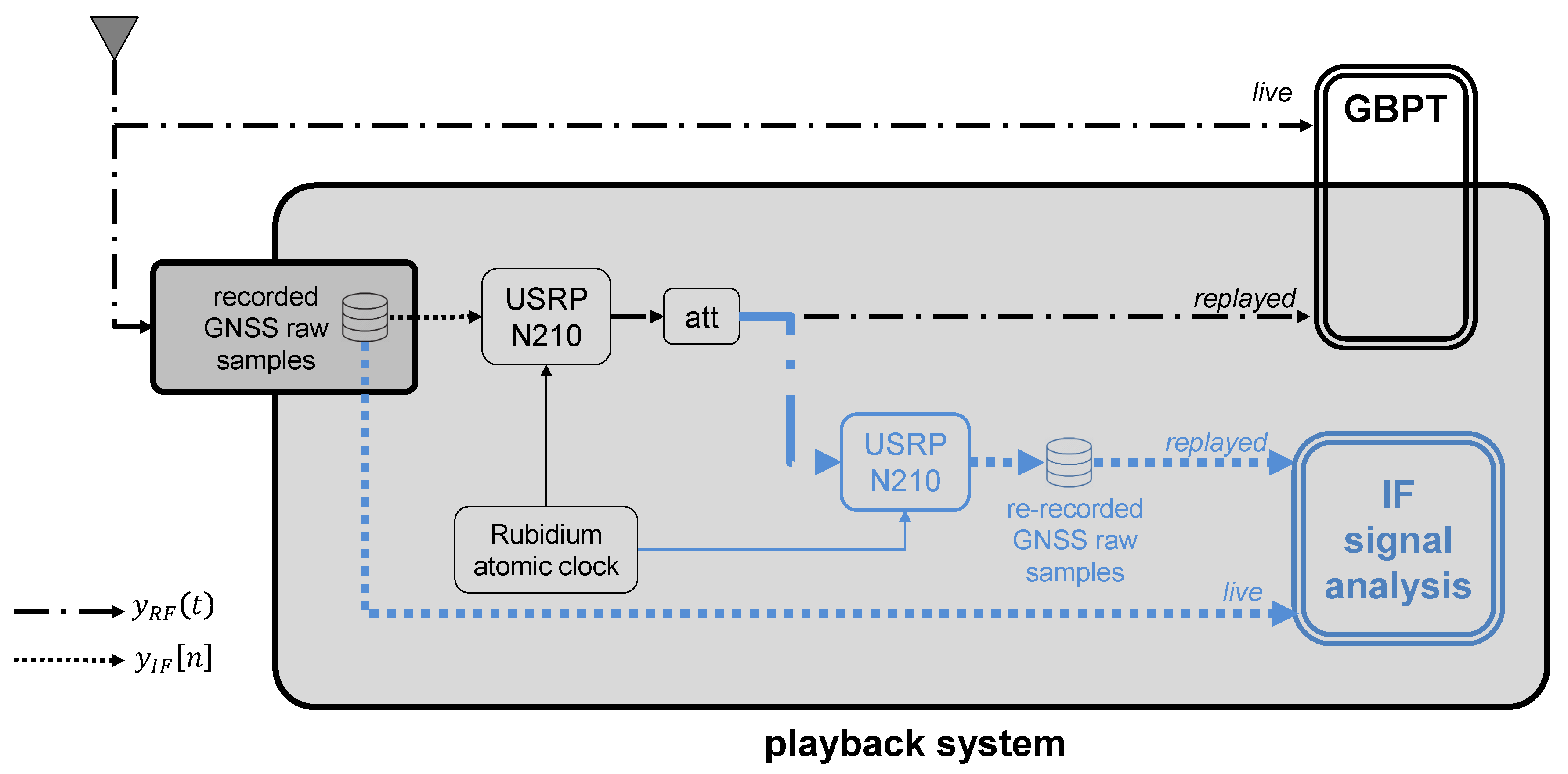
7.1. System Setup
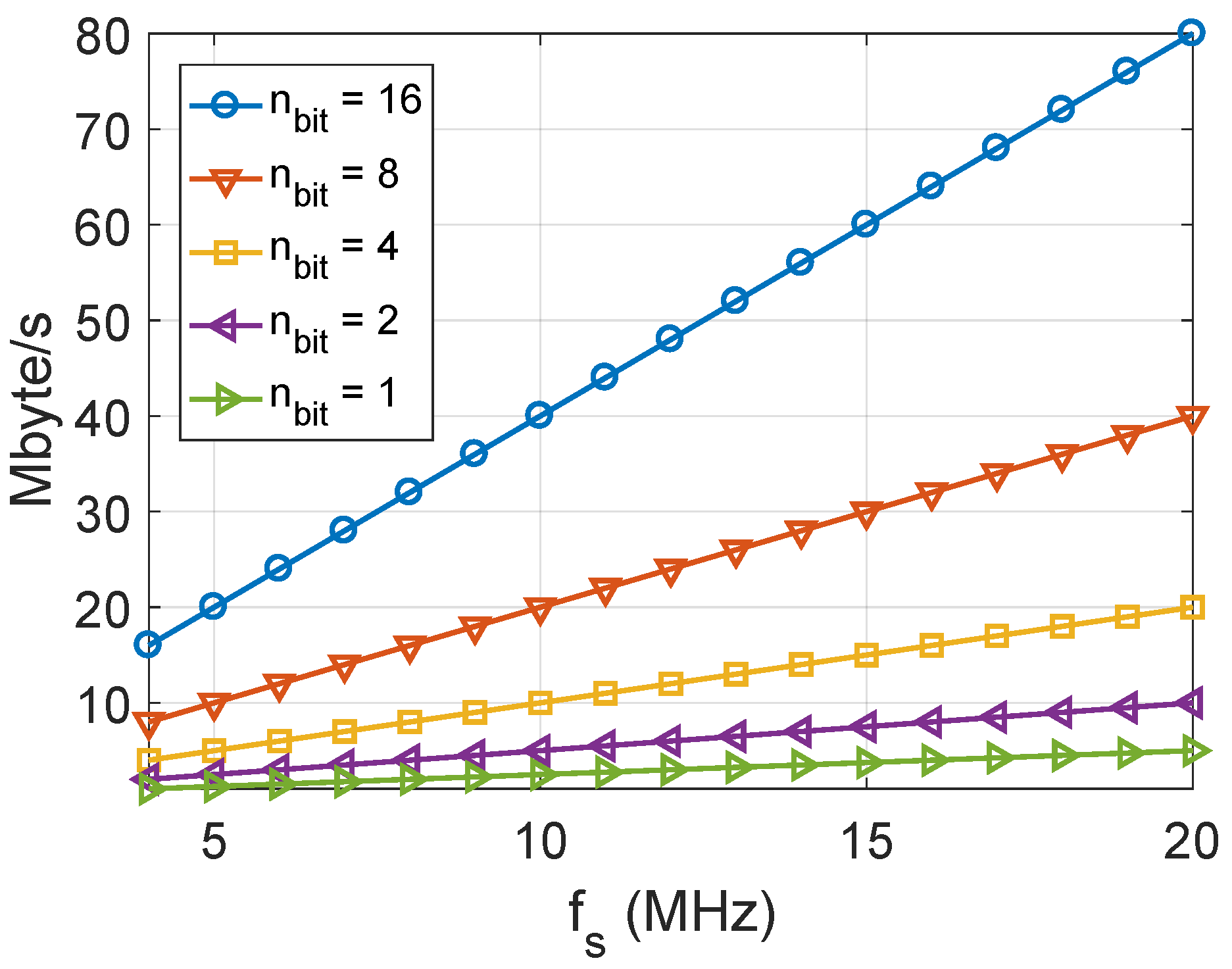
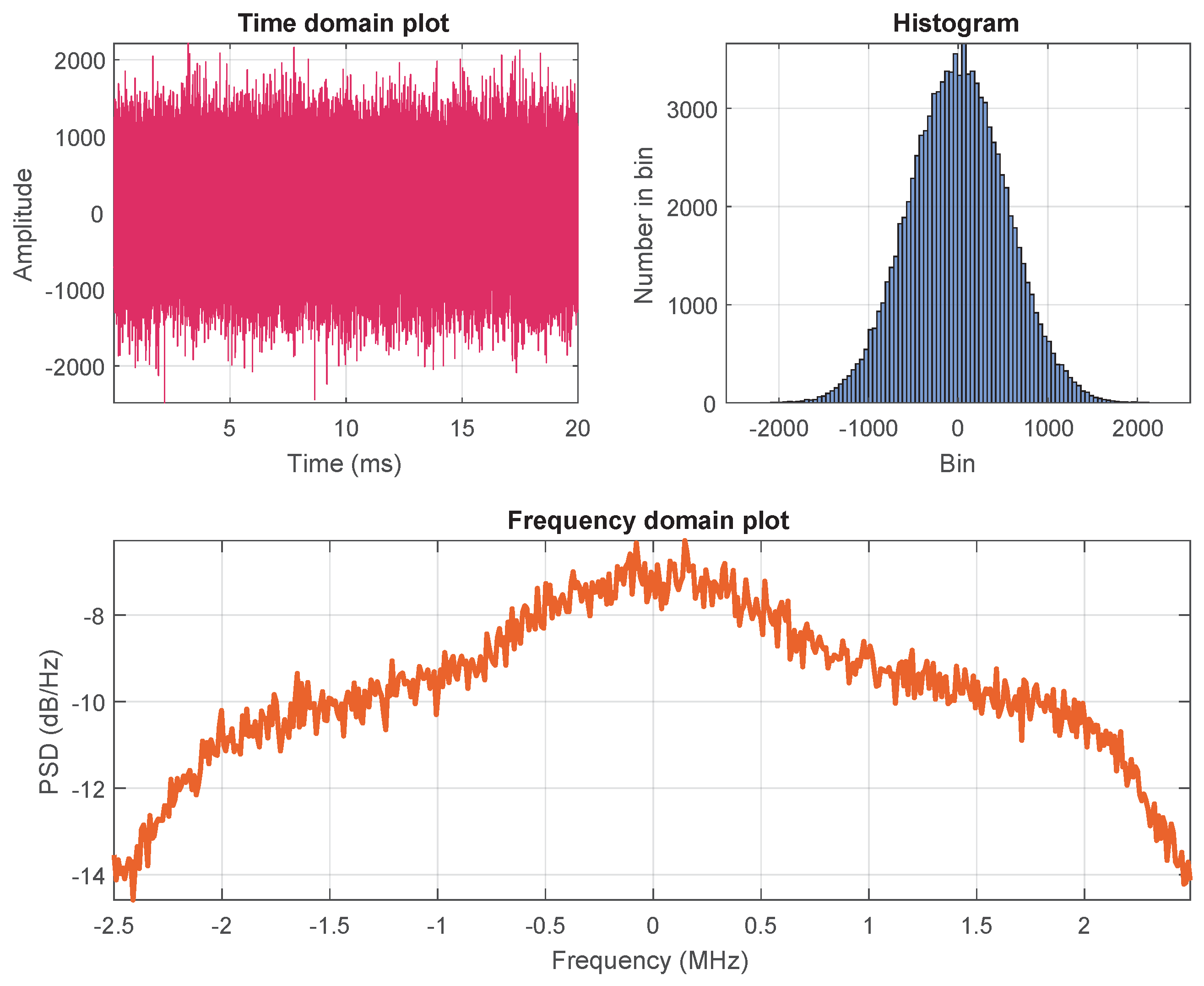
7.2. Analysis of the Recorded GNSS Raw Samples
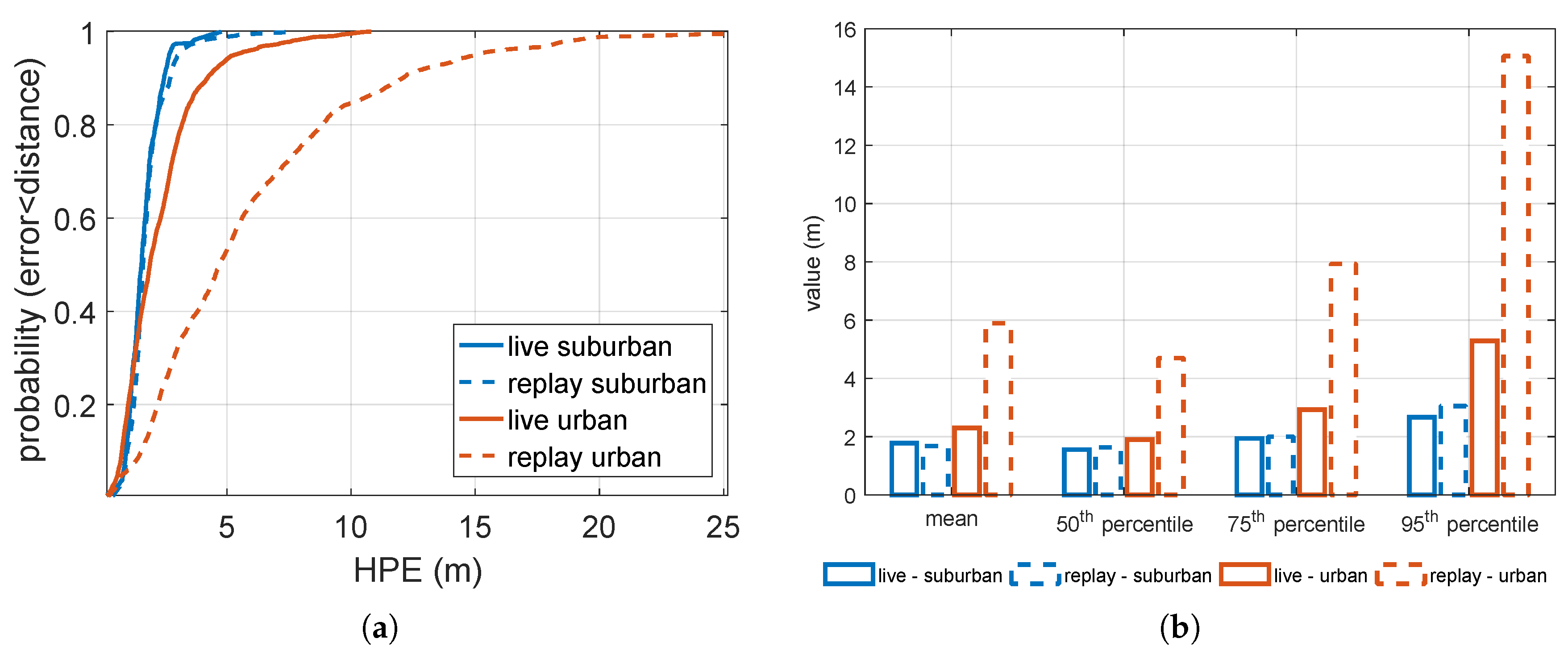
7.3. Performance Assessment
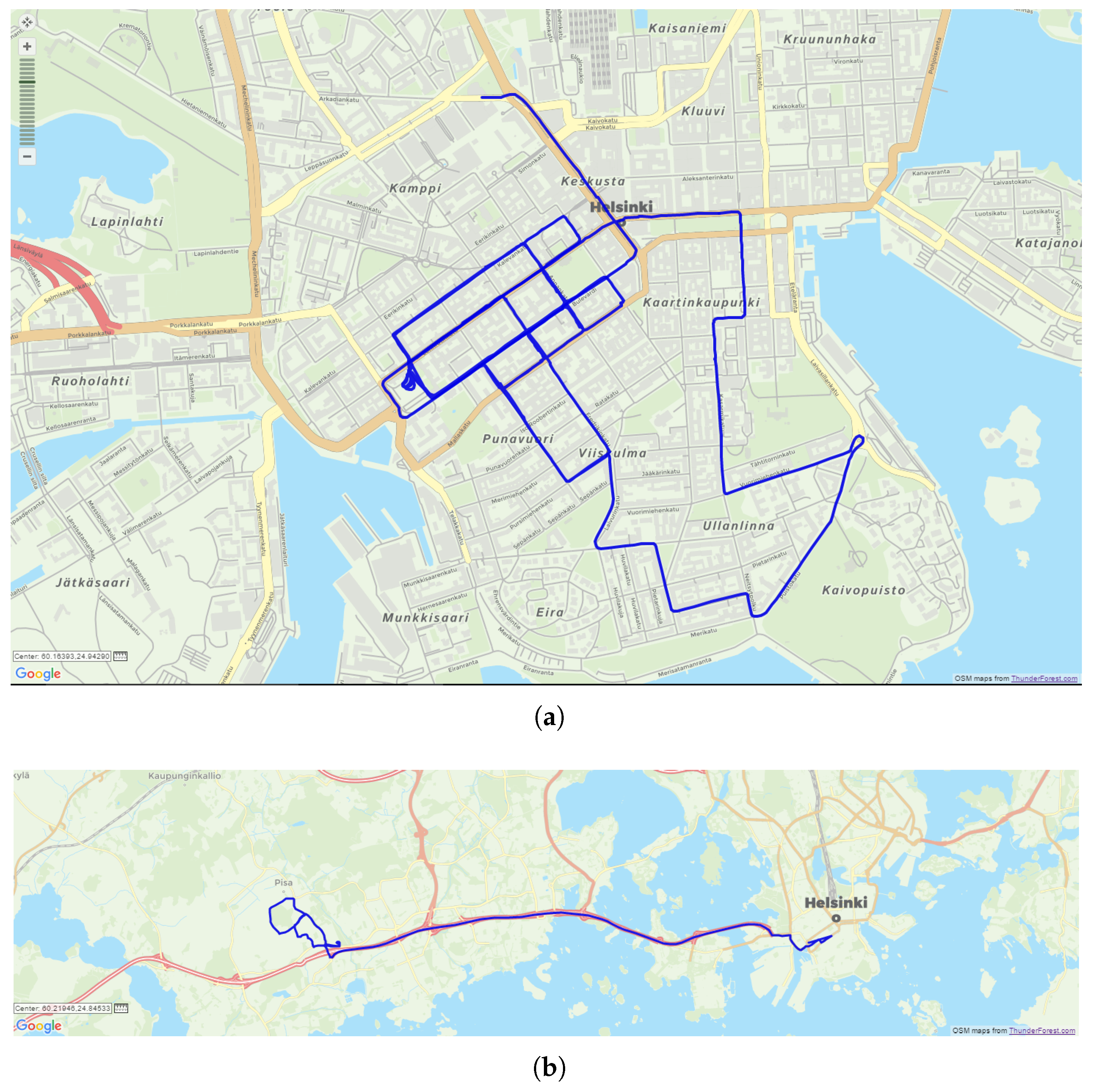
7.4. Analysis of the Discrepancies for the Urban Environment Case
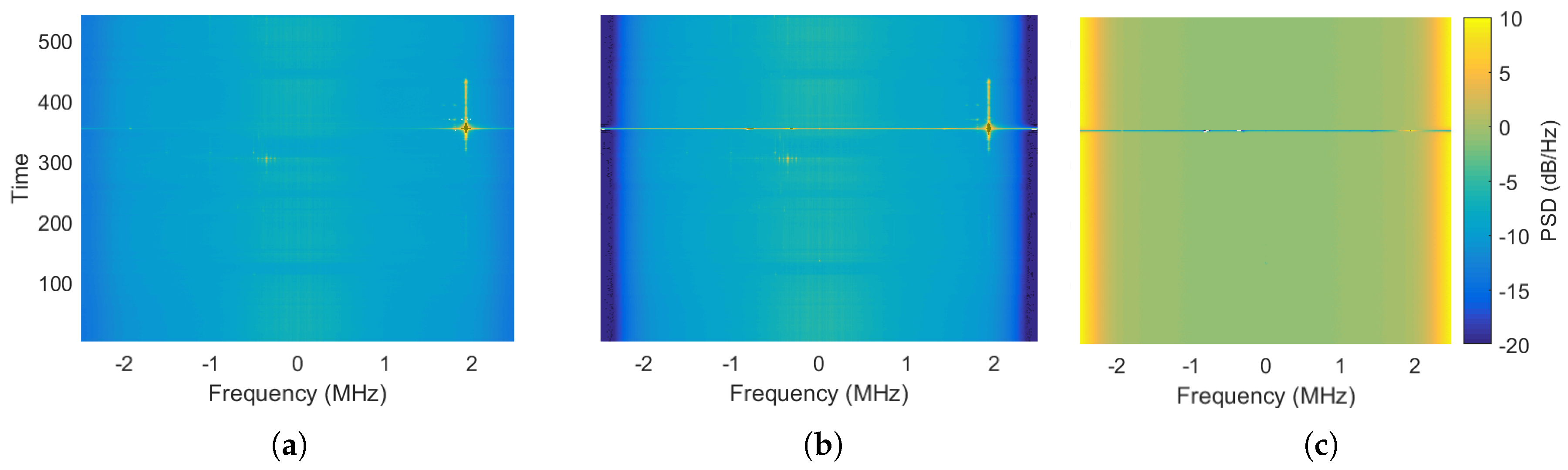
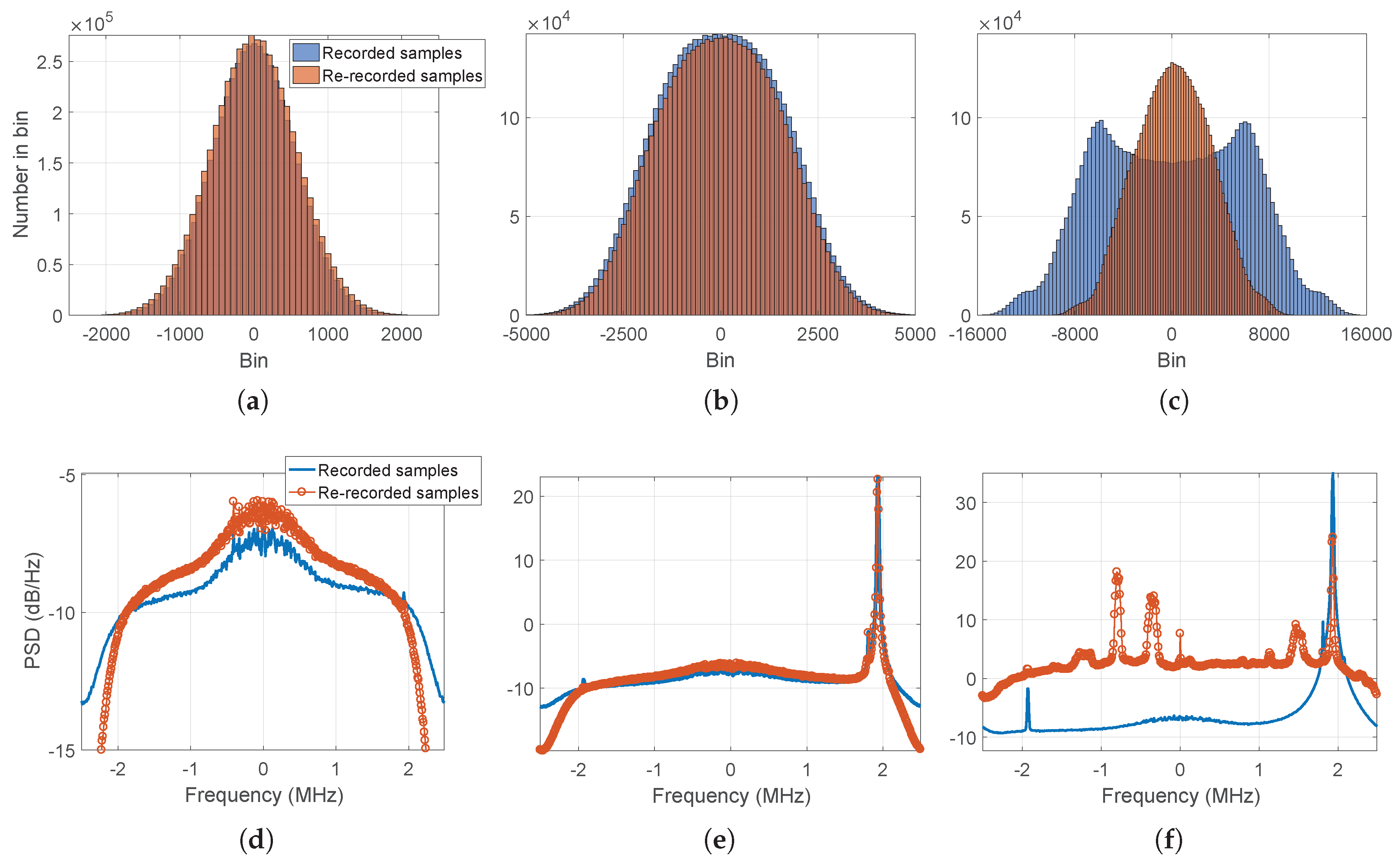
- Case I, Figure 13a,d: nominal conditions and faithful RF signal reconstruction. Histogram (a) and PSD (d) of the GNSS raw samples were computed at second 155. We can define this situation as nominal conditions due to the absence of interference components within the signal. Therefore, in nominal conditions the histogram of the live and replayed signal samples had the same Gaussian shape. In addition, the two signals exhibited identical spectra.
- Case II, Figure 13b,e: presence of RFI and faithful RF signal reconstruction. Histogram (b) and PSD (e) of the GNSS raw samples were computed at second 351. In that time instant, some interference components were present and located at approximately 2 MHz away from the central frequency. In correspondence of these points, the histogram of the signal samples did not have a Gaussian shape, as it should be in nominal conditions. However, the live and replayed histograms had the same shape. In addition, the two signals exhibited identical spectra, showing the capability of the system to collect and replay the full spectral information, even in non-nominal cases.
- Case III, Figure 13c,f: presence of RFI and wrong RF signal reconstruction. Histogram (c) and PSD (f) of the GNSS raw samples were computed at second 353. In that time instant, some strong interference components, located approximately 2 MHz away from the central frequency, threatened the data collection system, since the front-end went into saturation.
8. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation System; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Falco, G.; Pini, M.; Marucco, G. Loose and Tight GNSS/INS Integrations: Comparison of Performance Assessed in Real Urban Scenarios. Sensors 2017, 17, 255. [Google Scholar] [CrossRef] [PubMed]
- COST Action TU1302. SaPPART White Paper-Better Use of Global Navigation Satellite Systems for Safer and Greener Transport; Les collections de l’Ifsttar—techniques et méthodes—TMI 1. 58p; French Institute of Science and Technology for Transport, Development and Networks (Ifsttar): Marne-la-Vallée, France, 2015; ISBN 978-2-85782-707-8. [Google Scholar]
- Dey, K.; Rayamajhi, A.; Chowdhury, M.; Bhavsar, P.; Martin, J. Loose and Tight GNSS/INS Integrations: Vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication in a heterogeneous wireless network—Performance evaluation. Transp. Res. C Emerg. Technol. 2016, 68, 168–184. [Google Scholar] [CrossRef]
- Peyret, F. Standardization of performances of GNSS-based positioning terminals for ITS applications at CEN/CENELEC/TC5. In Proceedings of the 20th World Congress on Intelligent Transportation Systems, Tokyo, Japan, 15–18 October 2013. [Google Scholar]
- Lo Presti, L.; Falletti, E.; Nicola, M.; Troglia Gamba, M. Software defined radio technology for GNSS receivers. In Proceedings of the 2014 IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 29–30 May 2014; pp. 314–319. [Google Scholar]
- LabSat 3 Wideband. Available online: https://www.labsat.co.uk/index.php/en/products/labsat-3-wideband (accessed on 6 July 2018).
- Spirent GSS6425. Available online: https://www.spirent.com/Products/GSS6425 (accessed on 6 July 2018).
- Cristodaro, C.; Dovis, F.; Ruotsalainen, L. The record and replay approach for GNSS receiver performance assessment in road environment. In Proceedings of the 2017 International Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 30 January–2 February 2017; pp. 1369–1375. [Google Scholar]
- Cristodaro, C.; Dovis, F.; Falco, G.; Pini, M. GNSS receiver performance in urban environment: Challenges and test approaches for automotive applications. In Proceedings of the 2017 International Conference of Electrical and Electronic Technologies for Automotive, Torino, Italy, 15–16 June 2017; pp. 1–6. [Google Scholar]
- Aloi, D.N.; Alsliety, M.; Akos, D. A methodology for the evaluation of a GPS receiver performance in telematics applications. IEEE Trans. Instrum. Meas. 2007, 56, 11–24. [Google Scholar] [CrossRef]
- Ortiz, M.; Peyret, F.; Renaudin, V.; Betaille, D. From Lab to Road Test: Using a reference vehicle for solving GNSS localization challenges. Inside GNSS 2013, 8, 19. [Google Scholar]
- Chu, T.; Vinande, E.; Akos, D.; Weinstein, B. GNSS receiver evaluation record-and-playback test methods. GPS World 2010, 21, 28–34. [Google Scholar]
- Curran, J.; Fernández-Prades, C.; Morrison, A.; Bavaro, M. Innovation: The continued evolution of the GNSS Software-Defined Radio. GPS World 2018, 29, 43–49. [Google Scholar]
- Gunawardena, S.; Pany, T. GNSS SDR Metadata Standard Working Group Report. In Proceedings of the 28th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 3218–3221. [Google Scholar]
- Favenza, A.; Linty, N.; Dovis, F. Exploiting standardized metadata for GNSS SDR remote processing: A case study. In Proceedings of the 29th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 77–85. [Google Scholar]
- Cristodaro, C.; Dovis, F.; Linty, N.; Romero, R. Design of a Configurable Monitoring Station for Scintillations by Means of a GNSS Software Radio Receiver. IEEE Geosci. Remote Sens. Lett. 2018, 15, 325–329. [Google Scholar] [CrossRef]
- Borre, K.; Akos, D.M.; Bertelsen, N.; Rinder, P.; Jensen, S.H. A Software-Defined GPS and Galileo Receiver: A Single-Frequency Approach; Birkhaüser: Boston, MA, USA, 2007; ISBN 978-081-764-390-4. [Google Scholar]
- Backen, S.; Akos, D.; Wilson, S. RF replay system for narrowband GNSS IF signals. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 586–595. [Google Scholar] [CrossRef]
- Hall, D.A. Record, Replay, Rewind. GPS World 2010, 21, 28–34. [Google Scholar]
- Hickling, S.; Haddrell, T. Recording and replay of GNSS RF signals for multiple constellations and frequency bands. In Proceedings of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 1907–1918. [Google Scholar]
- Margaria, D.; Falletti, E. The Local Integrity Approach for Urban Contexts: Definition and Vehicular Experimental Assessment. Sensors 2016, 16, 154. [Google Scholar] [CrossRef] [PubMed]
- European Committee for Standardization—European Committee for Electrotechnical Standardization (CEN-CENELEC) EN 16803-1. Space—Use of GNSS-Based Positioning for Road Intelligent Transport Systems (ITS). Part 1: Definitions and System Engineering Procedures for the Establishment and Assessment of Performances; European Committee for Standardization: Brussels, Belgium, 2016. [Google Scholar]
- ETSI TS 103 246-5: Satellite Earth Stations and Systems (SES), GNSS Based Location Systems, Performance Test Specification. Available online: http://www.etsi.org/deliver/etsi_ts/103200_103299/10324605/01.01.01_60/ts_10324605v010101p.pdf (accessed on 6 July 2018).
- Novatel SPAN Inertial Navigation System. Available online: https://www.novatel.com/products/span-gnss-inertial-systems/ (accessed on 6 July 2018).
- Ublox NEO/LEA-M8T. Available online: https://www.u-blox.com/en/product/neolea-m8t (accessed on 6 July 2018).
- USRP N-210. Available online: https://www.ettus.com/product/details/UN210-KITt (accessed on 6 July 2018).
- Satellite Positioning Performance Assessment for Road Transport (SaPPART). Available online: http://www.sappart.net (accessed on 1 June 2018).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Cost | Realism | Complexity | Repeatability | Valid for Hybrid |
|---|---|---|---|---|---|
| Lab tests | low | low | medium | high | partially |
| Field tests | high | high | high | low | yes |
| R&R tests | medium | high | medium | high | yes |
| Sampling Type | Quantization | Interface | Reference | |||
|---|---|---|---|---|---|---|
| Configuration | 0 Hz (baseband) | 5 MHz | I and Q | 16 bits | Ethernet | Rubidium |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cristodaro, C.; Ruotsalainen, L.; Dovis, F. Benefits and Limitations of the Record and Replay Approach for GNSS Receiver Performance Assessment in Harsh Scenarios. Sensors 2018, 18, 2189. https://doi.org/10.3390/s18072189
Cristodaro C, Ruotsalainen L, Dovis F. Benefits and Limitations of the Record and Replay Approach for GNSS Receiver Performance Assessment in Harsh Scenarios. Sensors. 2018; 18(7):2189. https://doi.org/10.3390/s18072189
Chicago/Turabian StyleCristodaro, Calogero, Laura Ruotsalainen, and Fabio Dovis. 2018. "Benefits and Limitations of the Record and Replay Approach for GNSS Receiver Performance Assessment in Harsh Scenarios" Sensors 18, no. 7: 2189. https://doi.org/10.3390/s18072189
APA StyleCristodaro, C., Ruotsalainen, L., & Dovis, F. (2018). Benefits and Limitations of the Record and Replay Approach for GNSS Receiver Performance Assessment in Harsh Scenarios. Sensors, 18(7), 2189. https://doi.org/10.3390/s18072189