Tracking Ground Targets with a Road Constraint Using a GMPHD Filter

Abstract
:1. Introduction
2. GMPHD Filter
- (1)
- The single-target Markov transition density and likelihood function are both linear Gaussian, that is:where denotes a Gaussian probability density function with mean and covariance ; and are the state transition and measurement matrices, respectively; and denote the corresponding covariance matrices of process noise and measurement noise respectively; and are the target state vectors of the current time and the previous time, respectively; is the measurement vector, and is the time step.
- (2)
- The probabilities of target survival and detection are both independent of the kinematic state, i.e.:
- (3)
- The intensity of birth RFS is a Gaussian form:where are given model parameters of the intensity of birth.
3. GMPHDF Incorporating Map Information
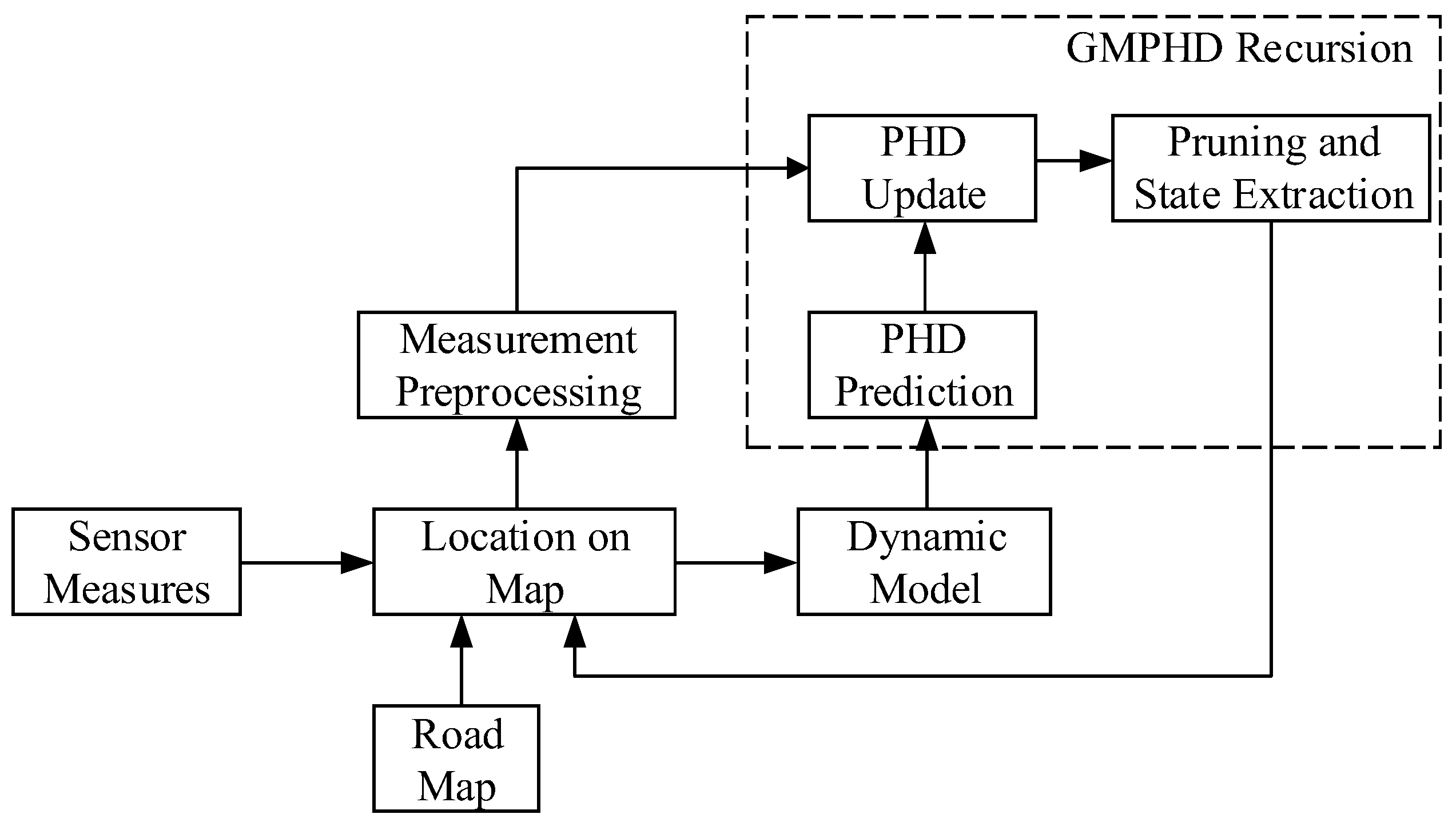
3.1. DPN-GMPHD Filter
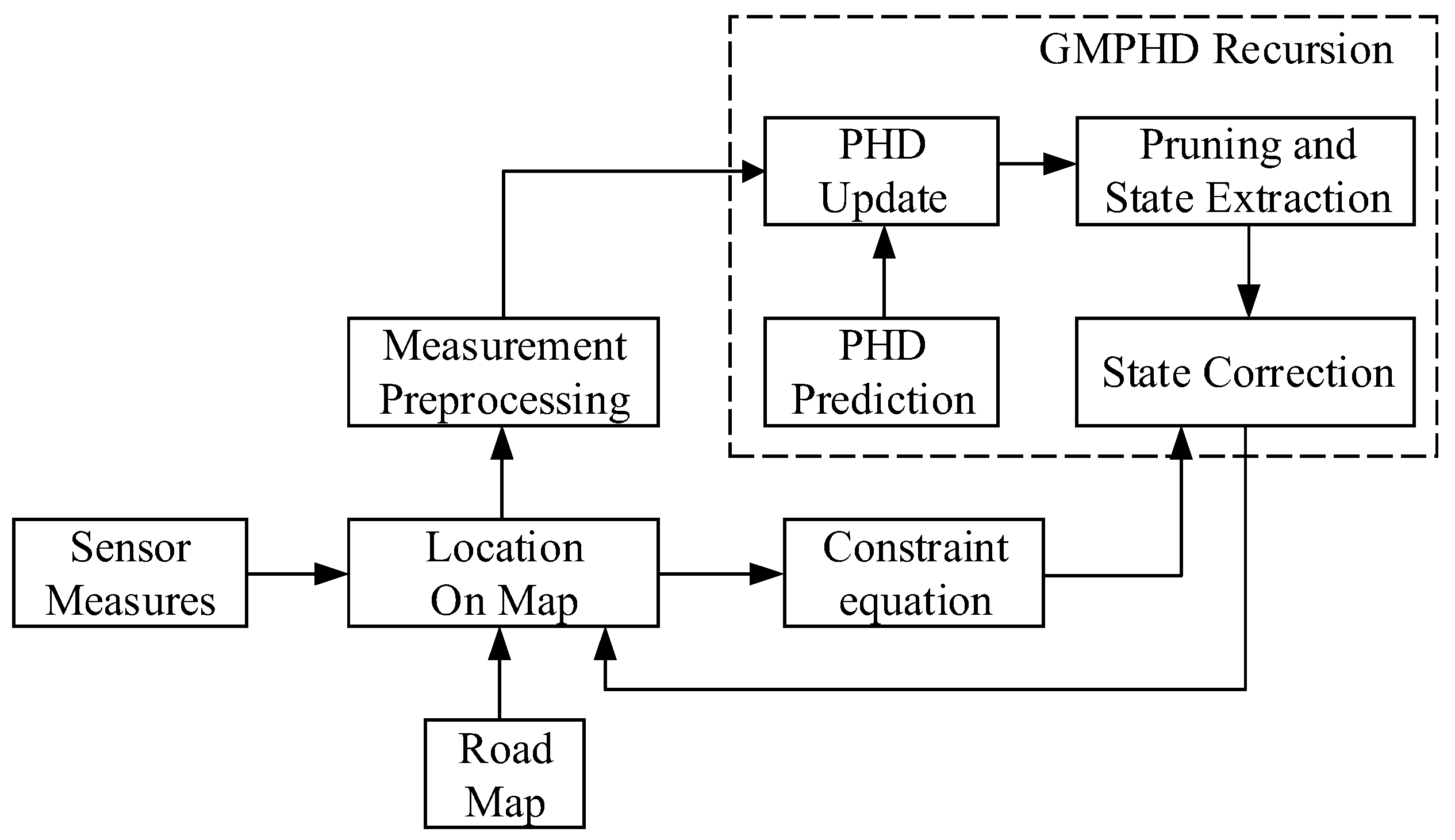
3.2. SC-GMPHD Filter
- (1)
- The trajectory of the target is a straight line, and the target position is on the center line of the road segment (the connection between the start and the end of the road), i.e.:
- (2)
- The direction of the target velocity is parallel to the direction of the road segment, i.e.:
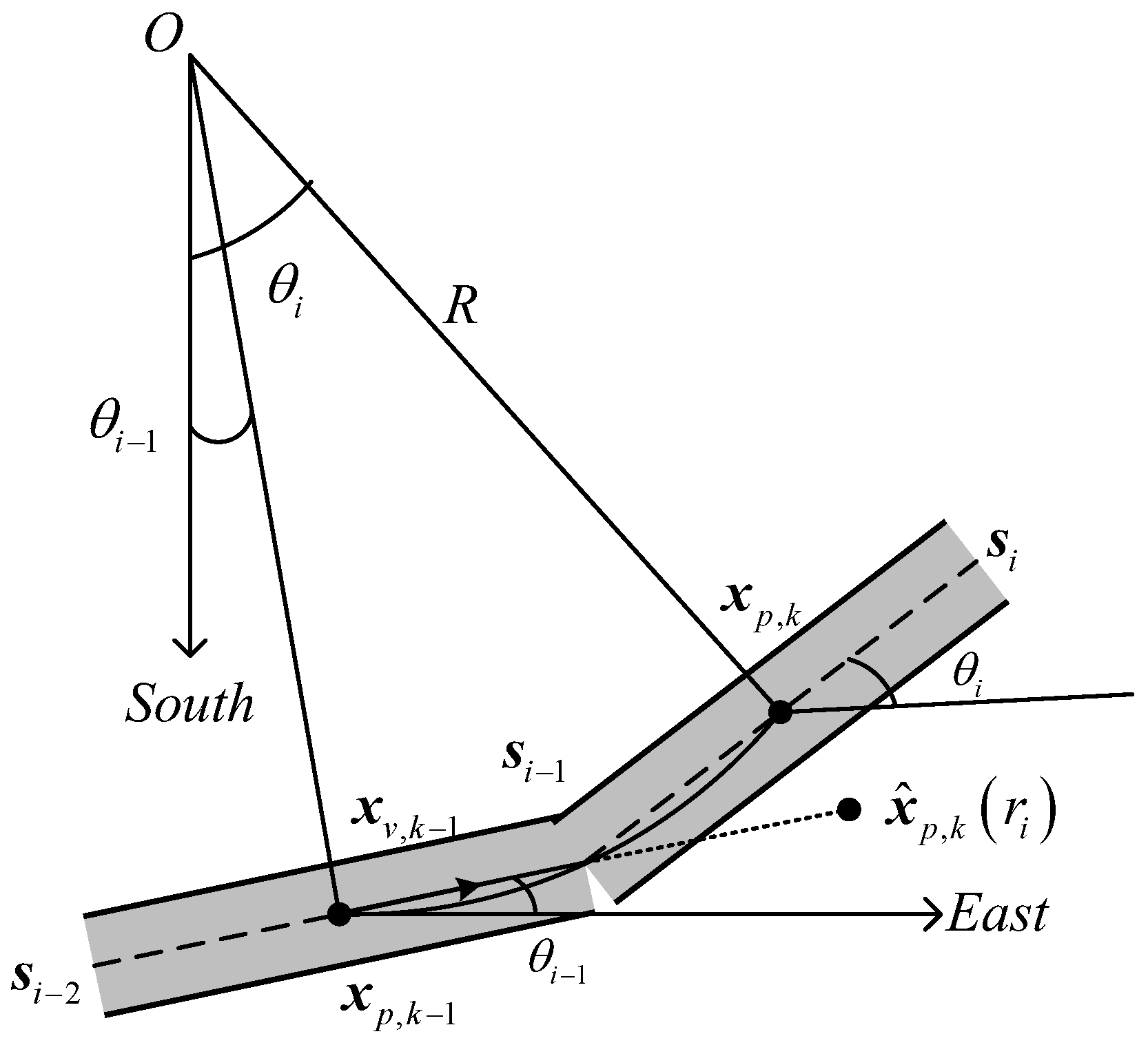
3.3. Road Segment Switching Algorithm
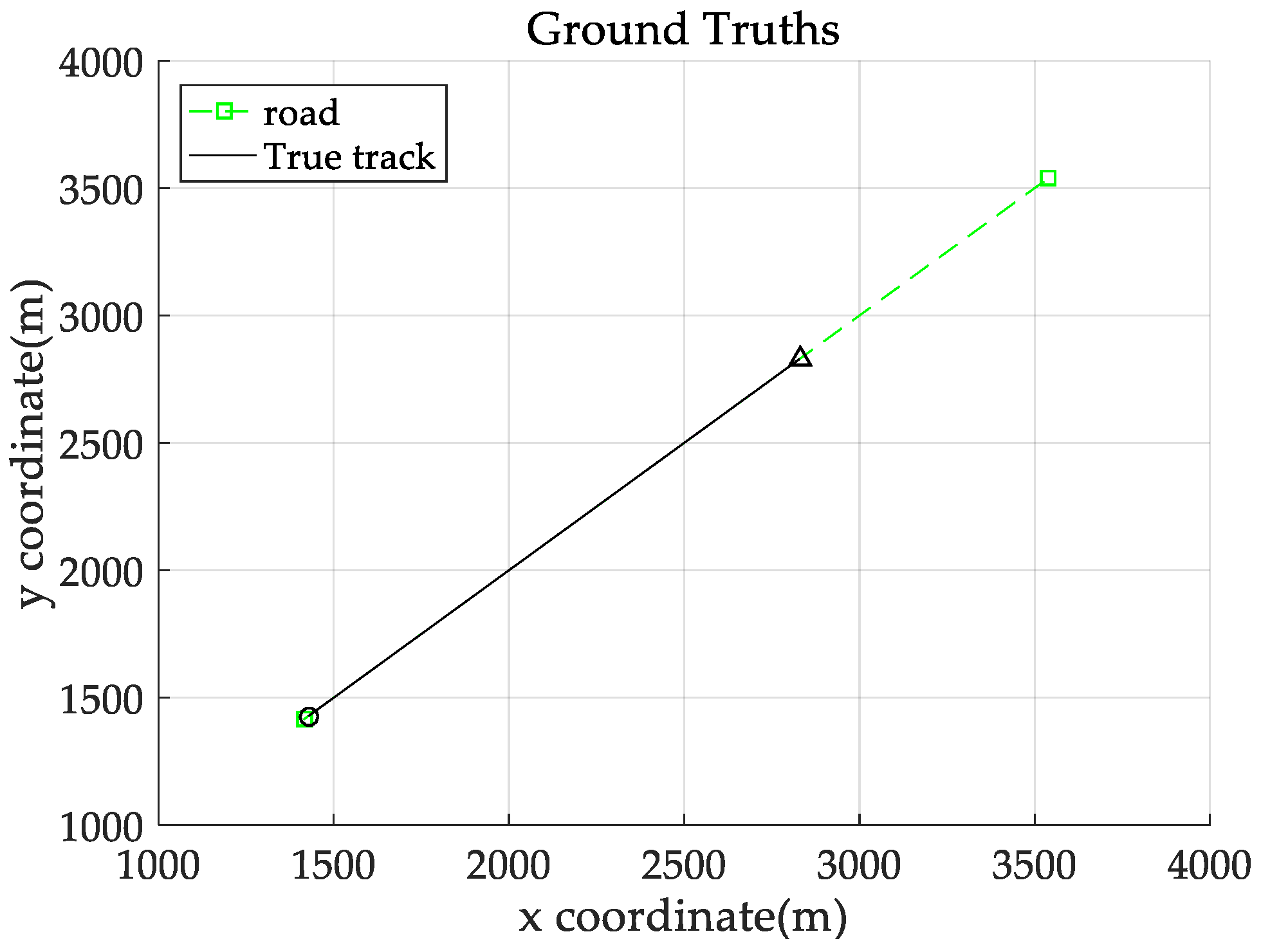
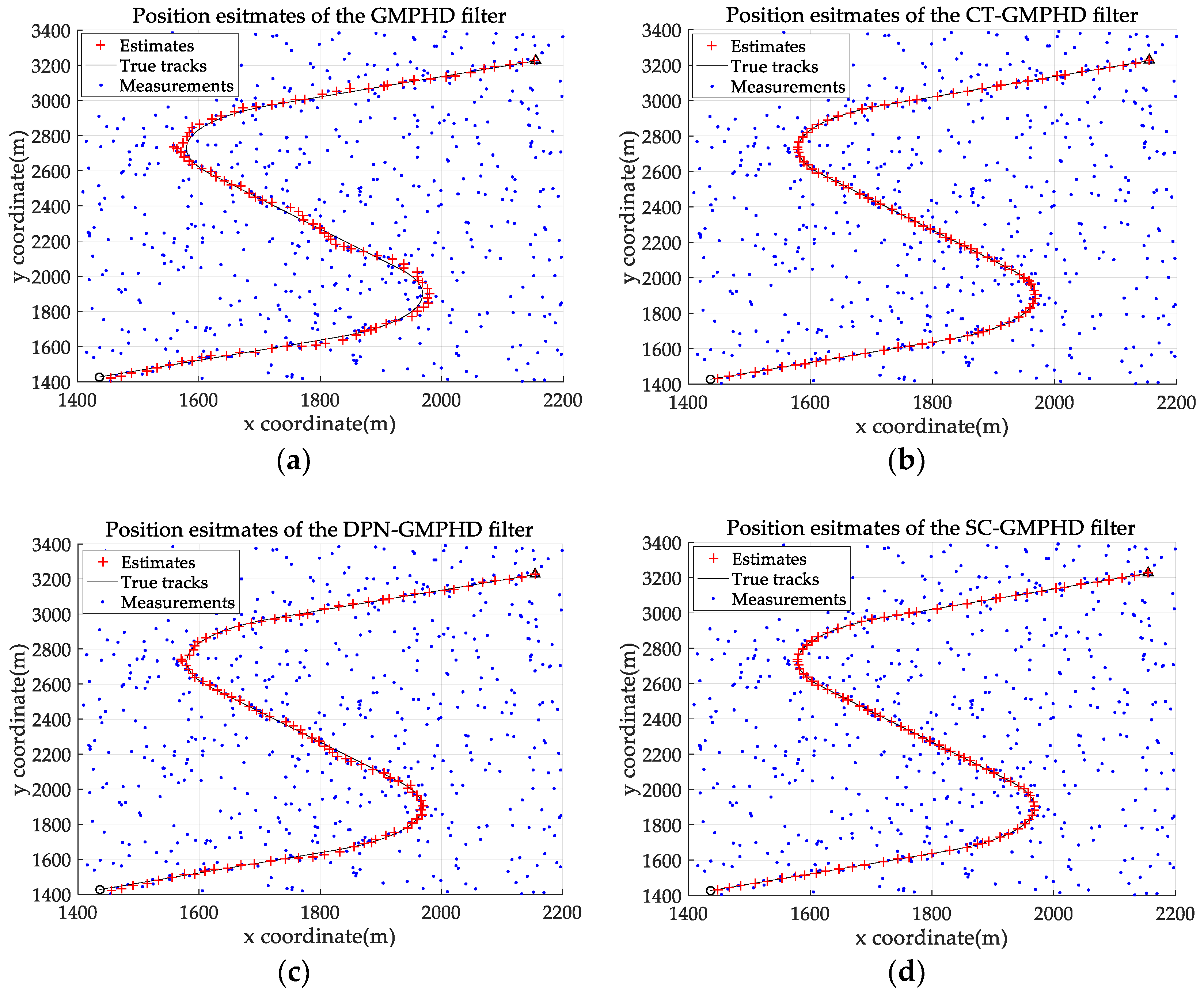
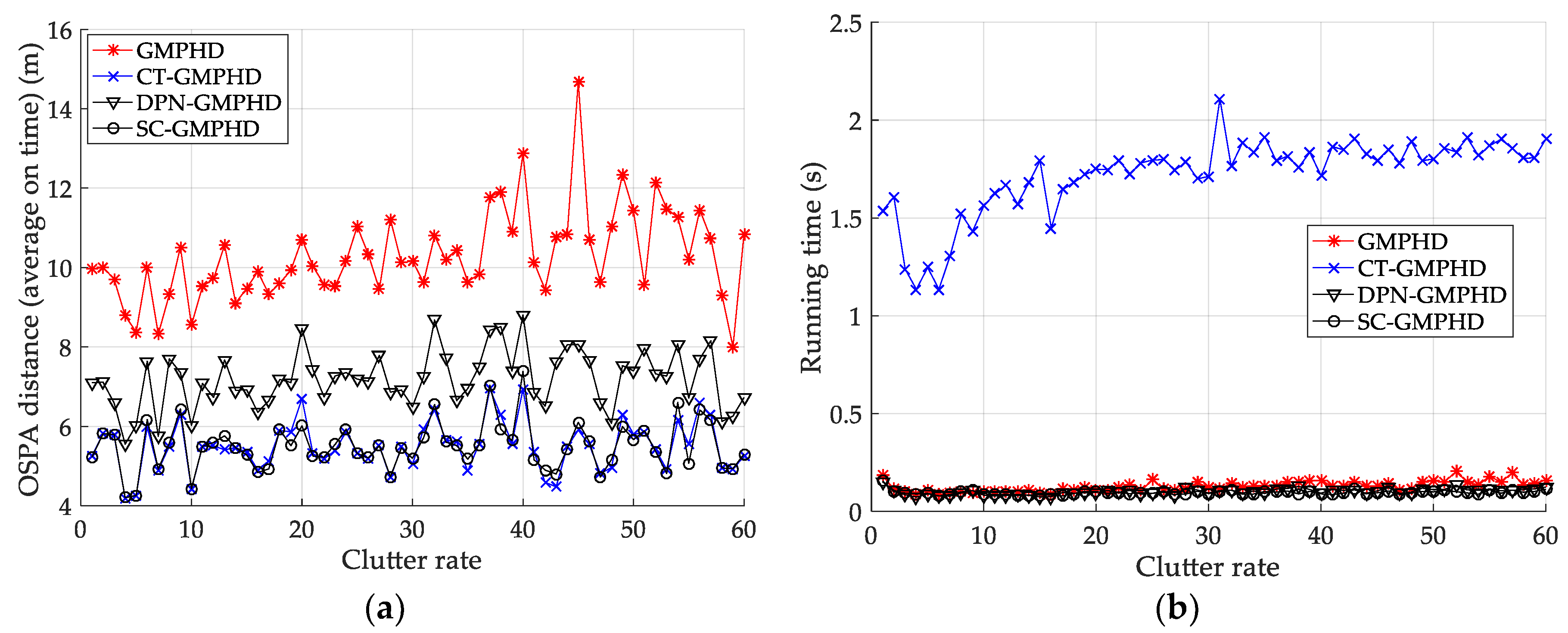
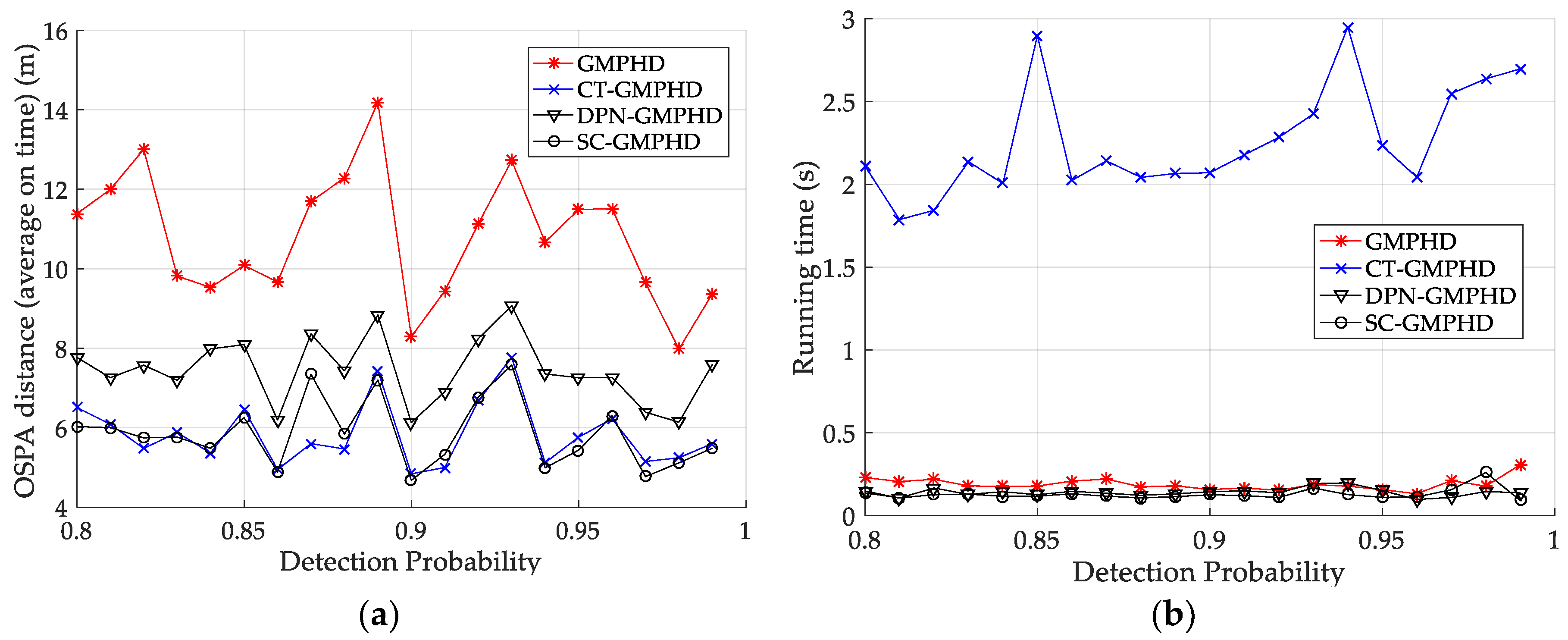
3.4. Simulation Results
4. Comparison of the CPHD and LMB Filters
4.1. The CPHD and LMB Filters
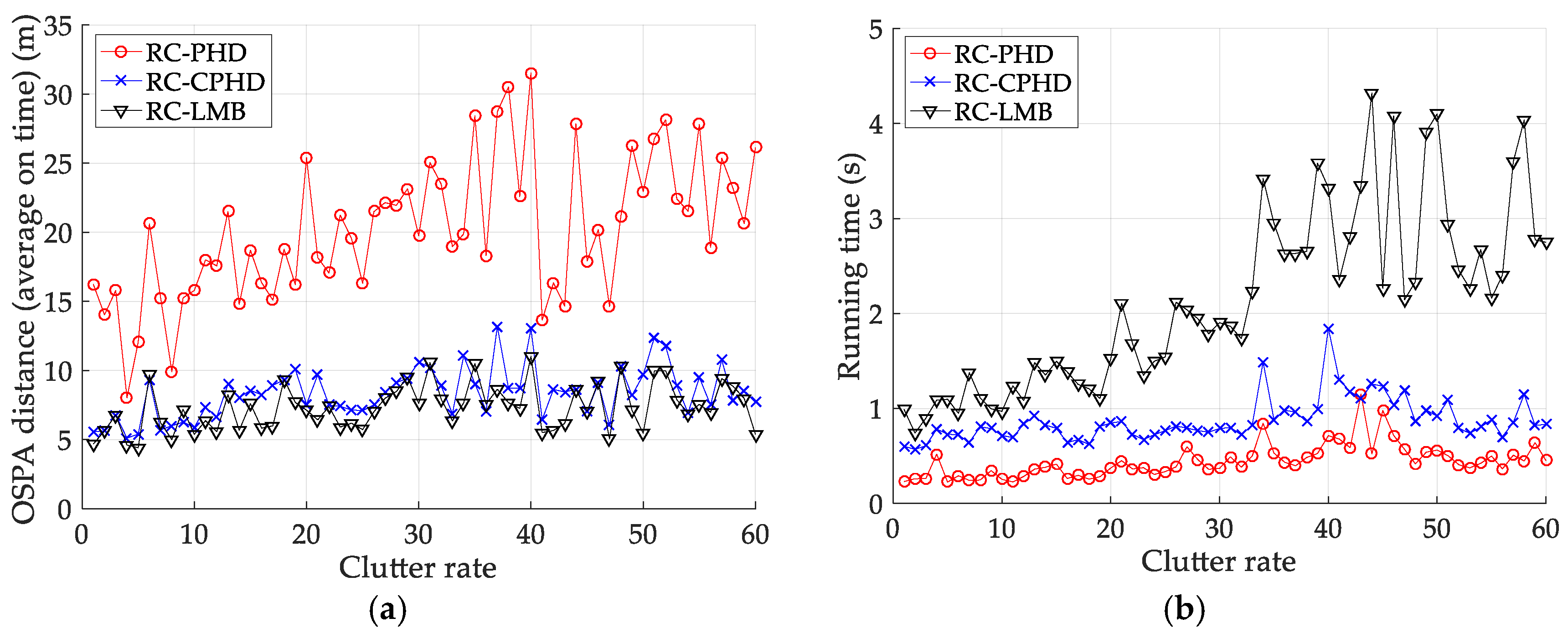
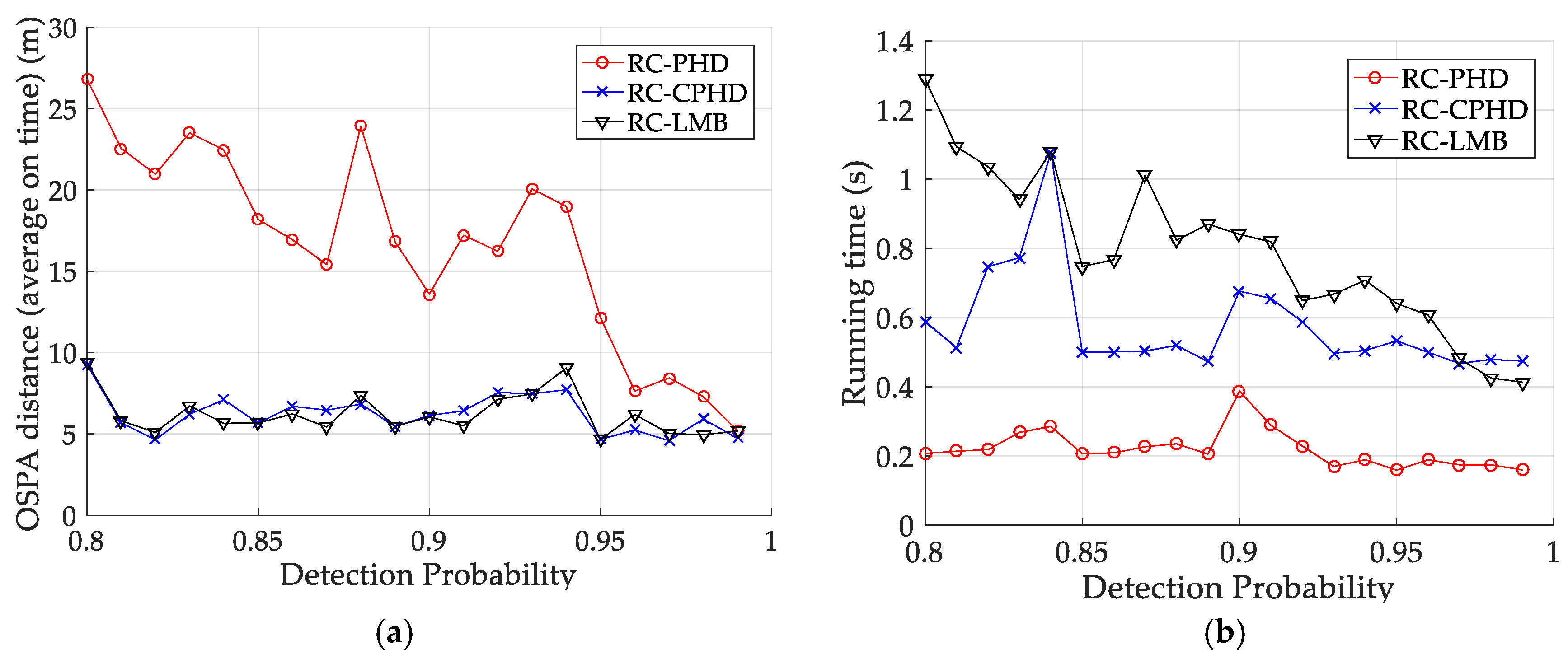
4.2. Simulation Results
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Ulmke, M.; Koch, W. Roadmap assisted ground moving target tracking. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1264–1274. [Google Scholar] [CrossRef]
- Drummond, O.E. Improved GMTI-tracking using roadmaps and topographic information. Proc. SPIE Int. Soc. Opt. Eng. 2003, 5204, 143–154. [Google Scholar]
- Kirubarajan, T.; Bar-Shalom, Y.; Pattipati, K.R.; Kadar, I. Ground target tracking with variable structure IMM estimator. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 26–46. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Gordon, N.; Orton, M.; Ristic, B. A variable structure multiple model particle filter for GMTI tracking. In Proceedings of the 2002 5th International Conference on Information Fusion, Annapolis, MD, USA, 8–11 July 2002; Volume 2, pp. 927–934. [Google Scholar]
- Koch, W.; Koller, J.; Ulmke, M. Ground target tracking and roadmap extraction. ISPRS J. Photogramm. Remote. Sens. 2006, 61, 197–208. [Google Scholar] [CrossRef]
- Kirubarajan, T.; Bar-Shalom, Y. Tracking evasive move-stop-move targets with a GMTI radar using a VS-IMM estimator. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1098–1103. [Google Scholar] [CrossRef]
- Herrero, J.G.; Portas, J.A.B.; Corredera, J.R.C. Use of map information for tracking targets on airport surface. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 675–693. [Google Scholar] [CrossRef]
- Pannetier, B.; Benameur, K.; Nimier, V.; Rombaut, M. VS-IMM using roadmap information for a ground target tracking. In Proceedings of the 2006 9th International Conference on Information Fusion, Florence, Italy, 10–13 July 2006; p. 8. [Google Scholar]
- Gao, C.; Chen, W. Ground moving target tracking with VS-IMM particle filter based on road information. In Proceedings of the IET International Radar Conference 2009, Guilin, China, 20–22 April 2009; pp. 1–4. [Google Scholar]
- Wang, X.; Li, T.; Sun, S.; Corchado, J.M. A Survey of Recent Advances in Particle Filters and Remaining Challenges for Multitarget Tracking. Sensors 2017, 17, 2707. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Hu, J.; Ji, B. A Survey of PHD Filtering Method Based on Random Finite Set. In Proceedings of the International Conference on Mechatronics Engineering and Information Technology, Dalian, China, 13–14 May 2017. [Google Scholar]
- Li, S.; Yi, W.; Hoseinnezhad, R.; Battistelli, G.; Wang, B.; Kong, L. Robust Distributed Fusion with Labeled Random Finite Sets. IEEE Trans. Signal Process. 2017, 66, 278–293. [Google Scholar] [CrossRef]
- Mahler, R.P.S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2004, 39, 1152–1178. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, S.; Wu, H.; He, R.; Hao, L. A Student’s t Mixture Probability Hypothesis Density Filter for Multi-Target Tracking with Outliers. Sensors 2018, 18, 1095. [Google Scholar] [CrossRef] [PubMed]
- Mahler, R. PHD filters of higher order in target number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Dong, P.; Jing, Z.; Gong, D.; Tang, B. Maneuvering multi-target tracking based on variable structure multiple model GMCPHD filter. Signal Process. 2017, 141, 158–167. [Google Scholar] [CrossRef]
- Bryant, D.S.; Delande, E.D.; Gehly, S.; Houssineau, J.; Clark, D.E.; Jones, B.A. The CPHD Filter with Target Spawning. IEEE Trans. Signal Process. 2017, 65, 13124–13138. [Google Scholar] [CrossRef]
- Vo, B.N.; Hoang, H.G.; Hoang, H.G. An Efficient Implementation of the Generalized Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2017, 65, 1975–1987. [Google Scholar] [CrossRef]
- Jiang, M.; Yi, W.; Hoseinnezhad, R.; Kong, L. Adaptive Vo-Vo filter for maneuvering targets with time-varying dynamics. In Proceedings of the International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016. [Google Scholar]
- Vo, B.N.; Vo, B.T.; Phung, D. Labeled Random Finite Sets and the Bayes Multi-Target Tracking Filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef] [Green Version]
- Reuter, S.; Vo, B.T.; Vo, B.N.; Dietmayer, K. The Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Vo, B.T.; Vo, B.N. Labeled Random Finite Sets and Multi-Object Conjugate Priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Ristic, B.; Vo, B.T.; Vo, B.N.; Farina, A. A Tutorial on Bernoulli Filters: Theory, Implementation and Applications. IEEE Trans. Signal Process. 2013, 61, 3406–3430. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. The Cardinality Balanced Multi-Target Multi-Bernoulli Filter and Its Implementations. IEEE Trans. Signal Process. 2009, 57, 409–423. [Google Scholar]
- Vo, B.N.; Singh, S.; Doucet, A. Sequential monte carlo implementation of the phd filter for multi-target tracking. In Proceedings of the Sixth International Conference on Information Fusion, Cairns, Australia, 8–11 July 2003; pp. 792–799. [Google Scholar]
- Vo, B.N.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar] [Green Version]
- Qin, L.; Huang, X.H. Adaptive target birth intensity for SMC-PHD/CPHD filtering. IEEE Trans. Aerosp. Electron. Syst. 2016, 8, 19. [Google Scholar]
- Si, W.; Wang, L.; Qu, Z. Multi-Target State Extraction for the SMC-PHD Filter. Sensors 2016, 16, 901. [Google Scholar] [CrossRef] [PubMed]
- Vo, B.N.; Ma, W.K. The Gaussian Mixture Probability Hypothesis Density Filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef] [Green Version]
- Vo, B.N.; Ma, W.K. A closed-form solution for the probability hypothesis density filter. In Proceedings of the International Conference on Information Fusion, Florence, Italy, 10–13 July 2006. [Google Scholar]
- Dong, P.; Jing, Z.; Li, M.; Pan, H. In The variable structure multiple model GM-PHD filter based on likely-model set algorithm. In Proceedings of the International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016; pp. 2289–2295. [Google Scholar]
- Zhou, X.; Li, Y.F.; He, B. Entropy distribution and coverage rate-based birth intensity estimation in GM-PHD filter for multi-target visual tracking. Signal Process. 2014, 94, 650–660. [Google Scholar] [CrossRef]
- Zhou, X.; Li, Y.; He, B.; Bai, T. GM-PHD-Based Multi-Target Visual Tracking Using Entropy Distribution and Game Theory. IEEE Trans. Ind. Inform. 2014, 10, 1064–1076. [Google Scholar] [CrossRef]
- Zhang, H.J.; Wang, J.; Ye, B.; Zhang, Y. A GM-PHD Filter for New Appearing Targets Tracking. In Proceedings of the 6th International Congress on Image and Signal Processing (CISP), Hangzhou, China, 16–18 December 2013; pp. 1153–1159. [Google Scholar]
- Zhang, Q.; Song, T.L. Improved Bearings-Only Multi-Target Tracking with GM-PHD Filtering. Sensors 2016, 16, 1469. [Google Scholar] [CrossRef] [PubMed]
- Yang, F.; Wang, Y.; Chen, H.; Zhang, P.; Liang, Y. Adaptive Collaborative Gaussian Mixture Probability Hypothesis Density Filter for Multi-Target Tracking. Sensors 2016, 16, 1666. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Wang, J.; Yuan, C.S. Roadmap-Assisted ground moving target tracking using gausian misture PHD filter. In Proceedings of the 2016 CIE International Conference on Radar, Guangzhou, China, 10–13 October 2016. [Google Scholar]
- Kirubarajan, T.; Barshalom, Y.; Kadar, I. Ground-target tracking with topography-based variable-structure IMM estimator. Proc. SPIE Int. Soc. Opt. Eng. 1998, 3373, 222–233. [Google Scholar]
- Duan, Z.; Li, X.R. Analysis, design, and estimation of linear equality-constrained dynamic systems. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2732–2746. [Google Scholar] [CrossRef]
- Xu, L.; Li, X.R.; Duan, Z.; Lan, J. Modeling and State Estimation for Dynamic Systems With Linear Equality Constraints. IEEE Trans. Signal Process. 2013, 61, 2927–2939. [Google Scholar] [CrossRef]
- Teixeira, B.O.S.; Tôrres, L.A.B.; Aguirre, L.A.; Bernstein, D.S. On unscented Kalman filtering with state interval constraints. J. Process. Control. 2010, 20, 45–57. [Google Scholar] [CrossRef]
- Ko, J.; Fox, D. GP-BayesFilters: Bayesian filtering using Gaussian process prediction and observation models. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 3471–3476. [Google Scholar]
- Kandepu, R.; Foss, B.; Imsland, L. Applying the unscented Kalman filter for nonlinear state estimation. J. Process. Control. 2008, 18, 753–768. [Google Scholar] [CrossRef]
- Julier, S.J.; Laviola, J.J. On Kalman Filtering with Nonlinear Equality Constraints. IEEE Trans. Signal Process. 2007, 55, 2774–2784. [Google Scholar] [CrossRef]
- Ulmke, M.; Koch, W. Roadmap Extraction using GMTI Tracking. In Proceedings of the International Conference on Information Fusion, Québec, QC, Canada, 9–12 July 2007; pp. 1–7. [Google Scholar]
- Yeddanapudi, M.; Bar-Shalom, Y.; Pattipati, K.R. IMM estimation for multitarget-multisensor air traffic surveillance. Proc. IEEE 1997, 85, 80–96. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R. Multitarget-Multisensor Tracking: Principles and Techniques. IEEE Aerosp. Electron. Syst. Mag. 1995, 11, 41–44. [Google Scholar]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. IET Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Simon, D.; Chia, T.L. Kalman filtering with state equality constraints. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 128–136. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.; Shi, X.; Liang, Y.; Wang, Y.; Pan, Q. Constrained multiple model probability hypothesis density filter for maneuvering ground target tracking. In Proceedings of the Chinese Automation Congress, Changsha, China, 7–8 November 2013; pp. 759–764. [Google Scholar]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A Consistent Metric for Performance Evaluation of Multi-Object Filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter Type | Filter Estimates | Fractionated Gain | OSPA Distance | RMSE |
|---|---|---|---|---|
| GMPHD |  |  | 8.8919 | 7.1376 6.2848 |
| CT-GMPHD |  |  | 6.0831 | 4.8847 4.8847 |
| DPN-GMPHD |  |  | 7.4390 | 6.4401 5.9297 |
| SC-GMPHD |  |  | 6.0575 | 4.8371 4.8371 |
| Filter Type | Average OSPA Distance (m) | Average Running Time (s) |
|---|---|---|
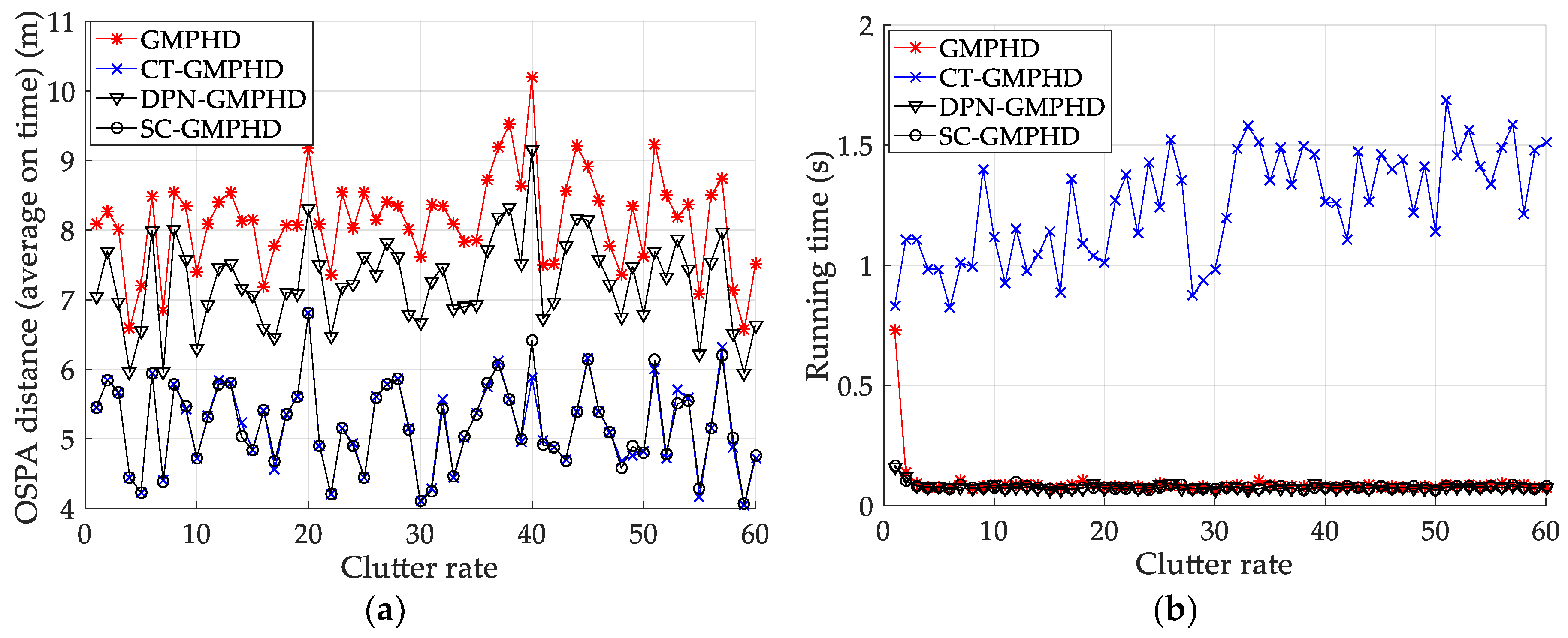
| GMPHD | 8.1407 | 0.0613 |
| CT-GMPHD | 5.1985 | 1.0868 |
| DPN-GMPHD | 7.2513 | 0.0599 |
| SC-GMPHD | 5.2027 | 0.0603 |
| Filter Type | Average OSPA Distance (m) | Average Running Time (s) |
|---|---|---|
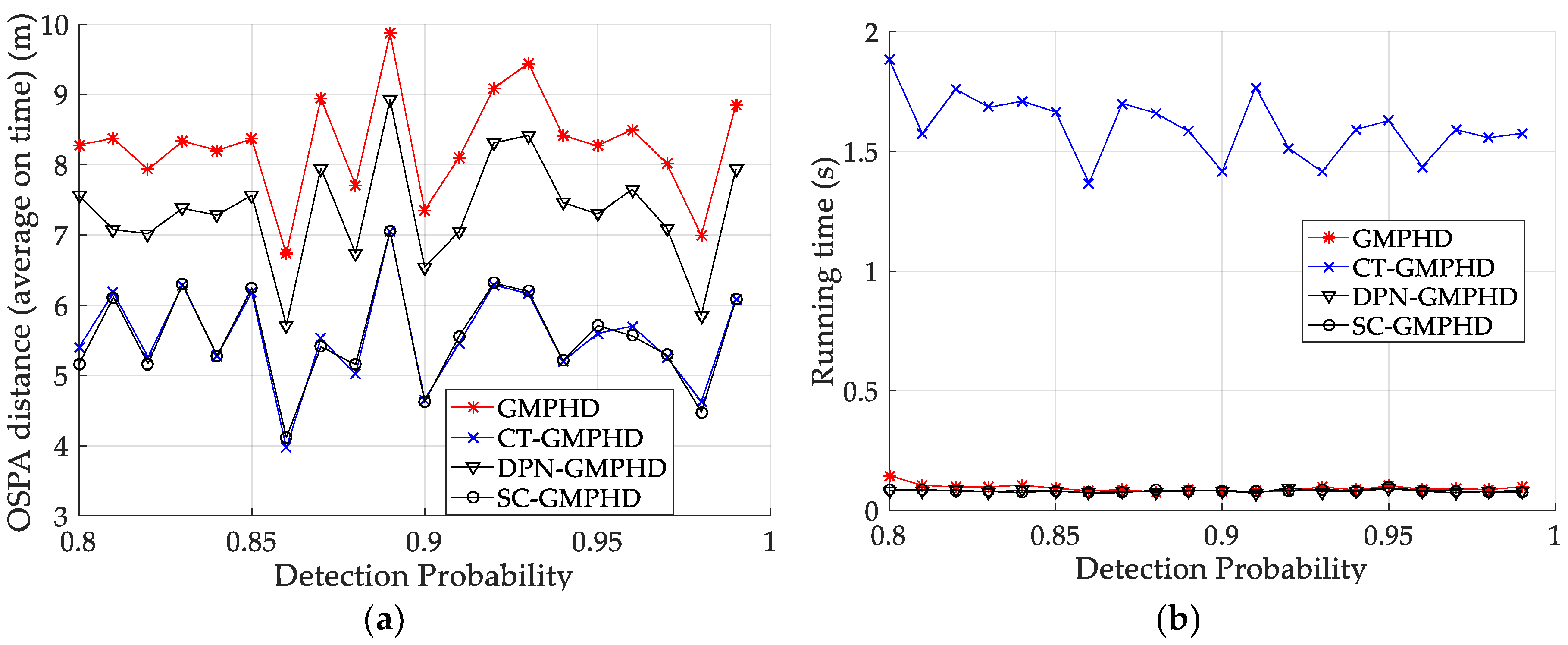
| GMPHD | 8.2889 | 0.0664 |
| CT-GMPHD | 5.5590 | 1.2926 |
| DPN-GMPHD | 7.3415 | 0.0618 |
| SC-GMPHD | 5.5516 | 0.0619 |
| Filter Type | Average OSPA Distance | RMSE |
|---|---|---|
| GMPHD | 10.7596 | 9.5748, 7.3602 |
| CT-GMPHD | 5.9806 | 4.5927, 5.5801 |
| DPN-GMPHD | 8.0298 | 6.6143, 6.2683 |
| SC-GMPHD | 5.9927 | 4.5898, 5.5882 |
| Filter Type | Average OSPA Distance (m) | Average Running Time (s) |
|---|---|---|
| GMPHD | 10.2843 | 0.0966 |
| CT-GMPHD | 5.4990 | 1.3550 |
| DPN-GMPHD | 7.1933 | 0.0742 |
| SC-GMPHD | 5.5016 | 0.0718 |
| Filter Type | Average OSPA Distance (m) | Average Running Time (s) |
|---|---|---|
| GMPHD | 10.7964 | 0.1369 |
| CT-GMPHD | 5.8325 | 1.5364 |
| DPN-GMPHD | 7.4537 | 0.0956 |
| SC-GMPHD | 5.8517 | 0.0884 |
| Filter Type | Filter Estimates | OSPA Distance | Average OSPA | Running Time |
|---|---|---|---|---|
| RC-PHD |  |  | 7.2722 | 0.7821 |
| RC-CPHD |  |  | 5.4188 | 1.2313 |
| RC-LMB |  |  | 4.9550 | 1.4982 |
| Filter Type | Average OSPA Distance (m) | Average Running Time (s) |
|---|---|---|
| RC-PHD | 20.1743 | 0.2941 |
| RC-CPHD | 8.3444 | 0.6404 |
| RC-LB | 7.2972 | 1.4842 |
| Filter Type | Average OSPA Distance (m) | Average Running Time (s) |
|---|---|---|
| RC-PHD | 16.7275 | 0.2200 |
| RC-CPHD | 6.2314 | 0.5785 |
| RC-LBM | 6.2089 | 0.7956 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, J.; Gao, M. Tracking Ground Targets with a Road Constraint Using a GMPHD Filter. Sensors 2018, 18, 2723. https://doi.org/10.3390/s18082723
Zheng J, Gao M. Tracking Ground Targets with a Road Constraint Using a GMPHD Filter. Sensors. 2018; 18(8):2723. https://doi.org/10.3390/s18082723
Chicago/Turabian StyleZheng, Jihong, and Meiguo Gao. 2018. "Tracking Ground Targets with a Road Constraint Using a GMPHD Filter" Sensors 18, no. 8: 2723. https://doi.org/10.3390/s18082723
APA StyleZheng, J., & Gao, M. (2018). Tracking Ground Targets with a Road Constraint Using a GMPHD Filter. Sensors, 18(8), 2723. https://doi.org/10.3390/s18082723