Distributed Egocentric Betweenness Measure as a Vehicle Selection Mechanism in VANETs: A Performance Evaluation Study

 , ,
, ,  and
and
Abstract
:1. Introduction
- The proposal of a distributed approach to compute egocentric betweenness scores over VANETs, in which vehicles only use local knowledge of the network topology;
- The experimental evidence that our proposed approach is scalable to a large number of vehicles and can handle high mobility of vehicles;
- A method to characterize the importance of a node in highly dynamic networks using the egocentric betweenness measure;
- Experiment results demonstrate that the use of the egocentric betweenness measure can be a viable option as a VSM in highly dynamic networks.
2. Related Work
2.1. Egocentric Betweenness Measure Used in Different Areas
2.2. Distributed System for Information Management and Knowledge Distribution
3. Sociocentric and Egocentric Centrality Measures
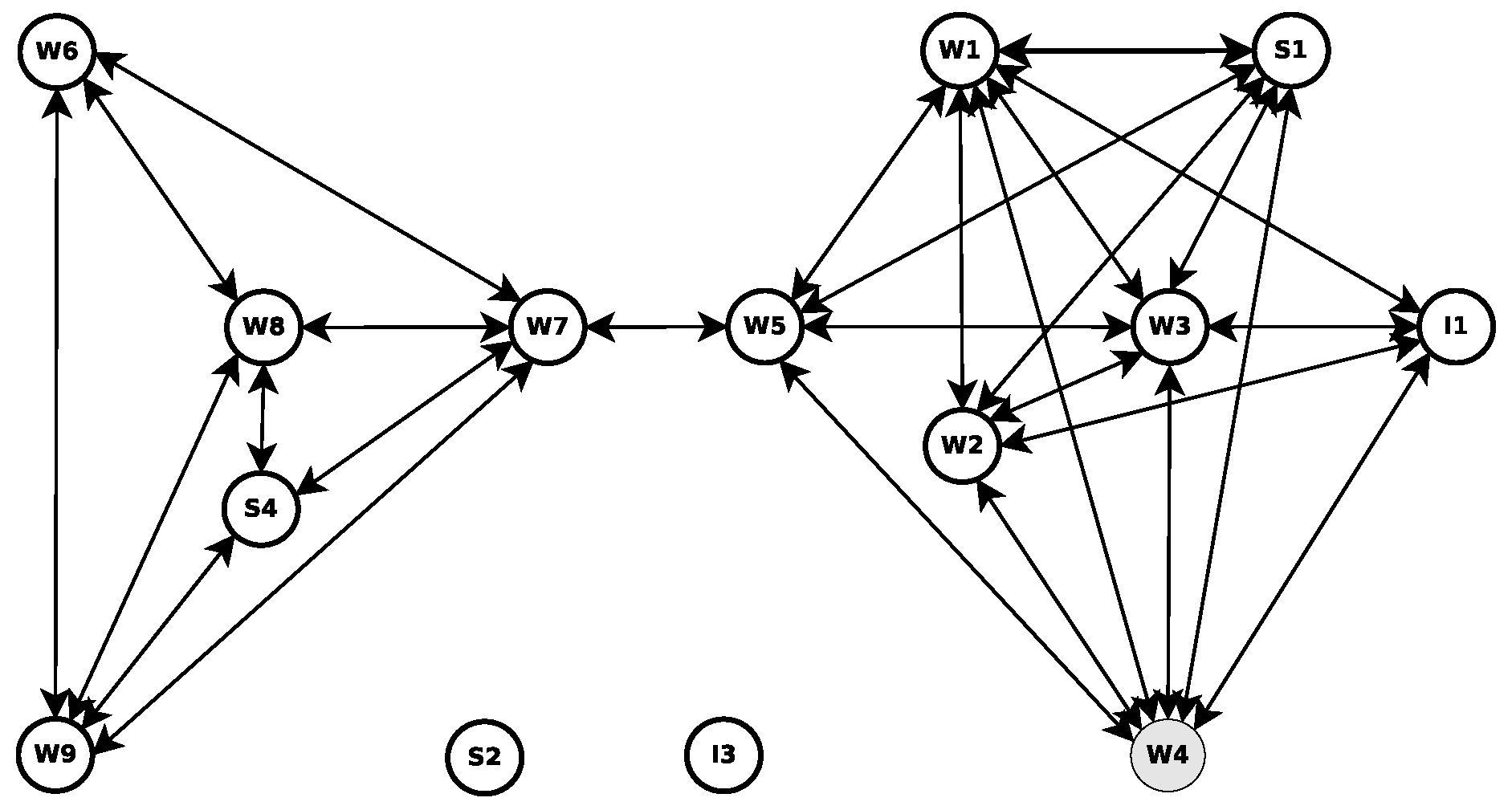
3.1. Sociocentric Centrality Measures
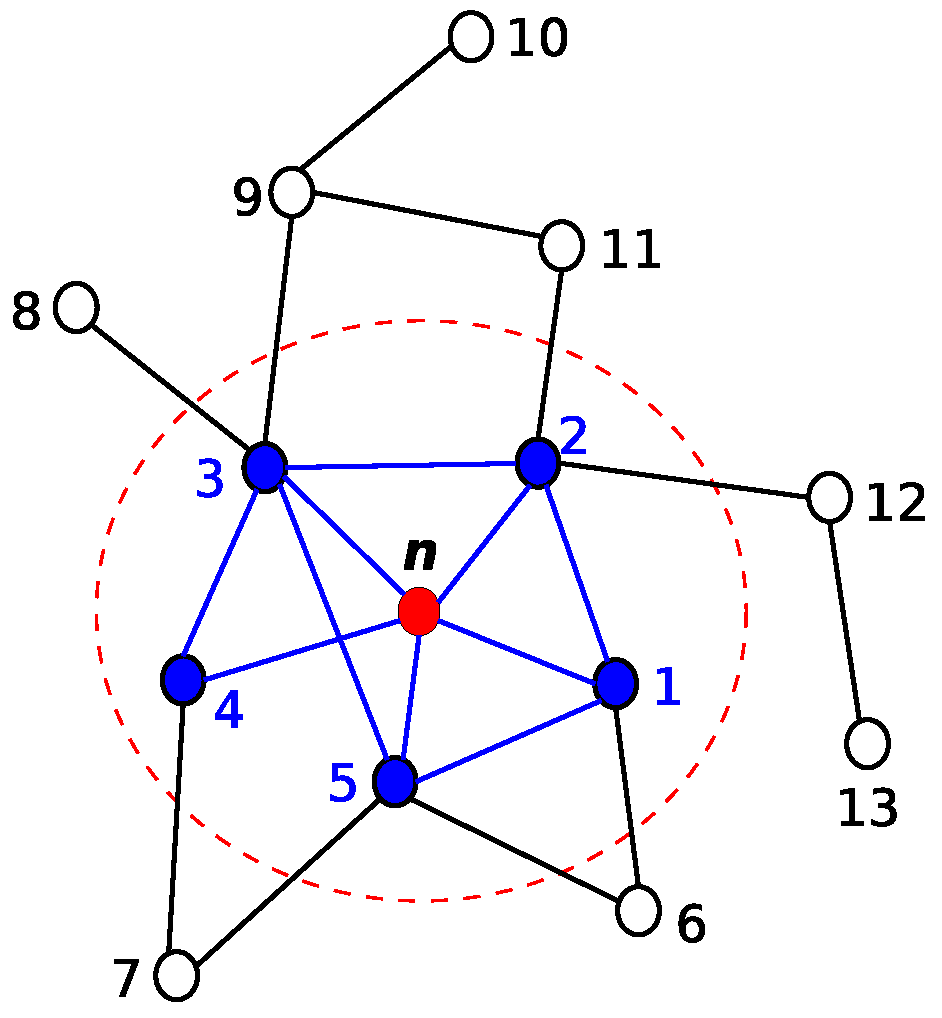
3.2. Egocentric Centrality Measures
3.3. Complexity Analysis of the Sociocentric and Egocentric Measures
4. Egocentric Betweenness Measure in VANETs
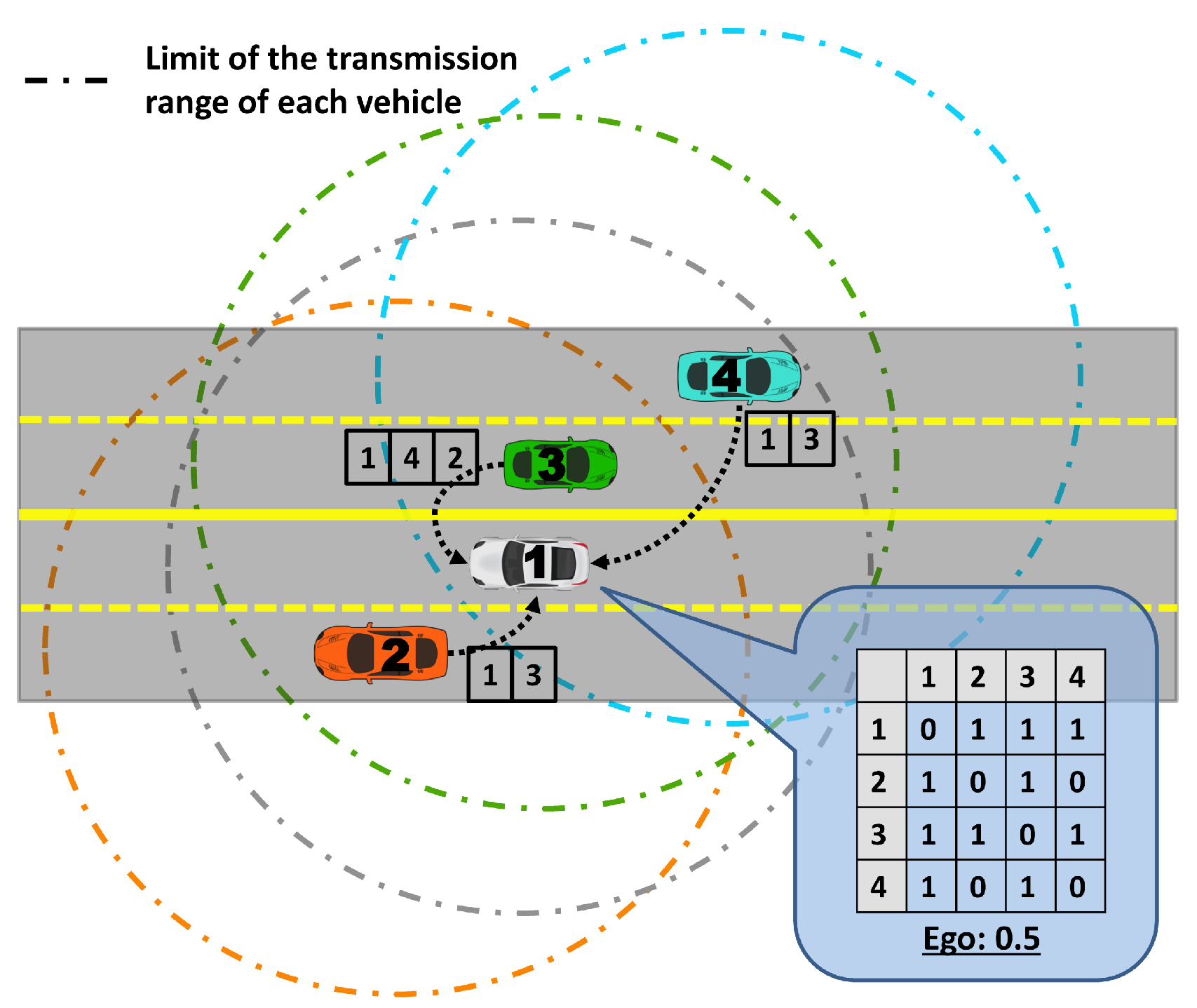
4.1. Assumptions
- Each vehicle has bidirectional communication links among neighbour vehicles within transmission range. The link breaks if the distance between vehicles is greater than the transmission range;
- All vehicles have the same transmission range;
- The propagation model employed is two-ray interference path loss.
4.2. Proposed Approach

5. Experiments
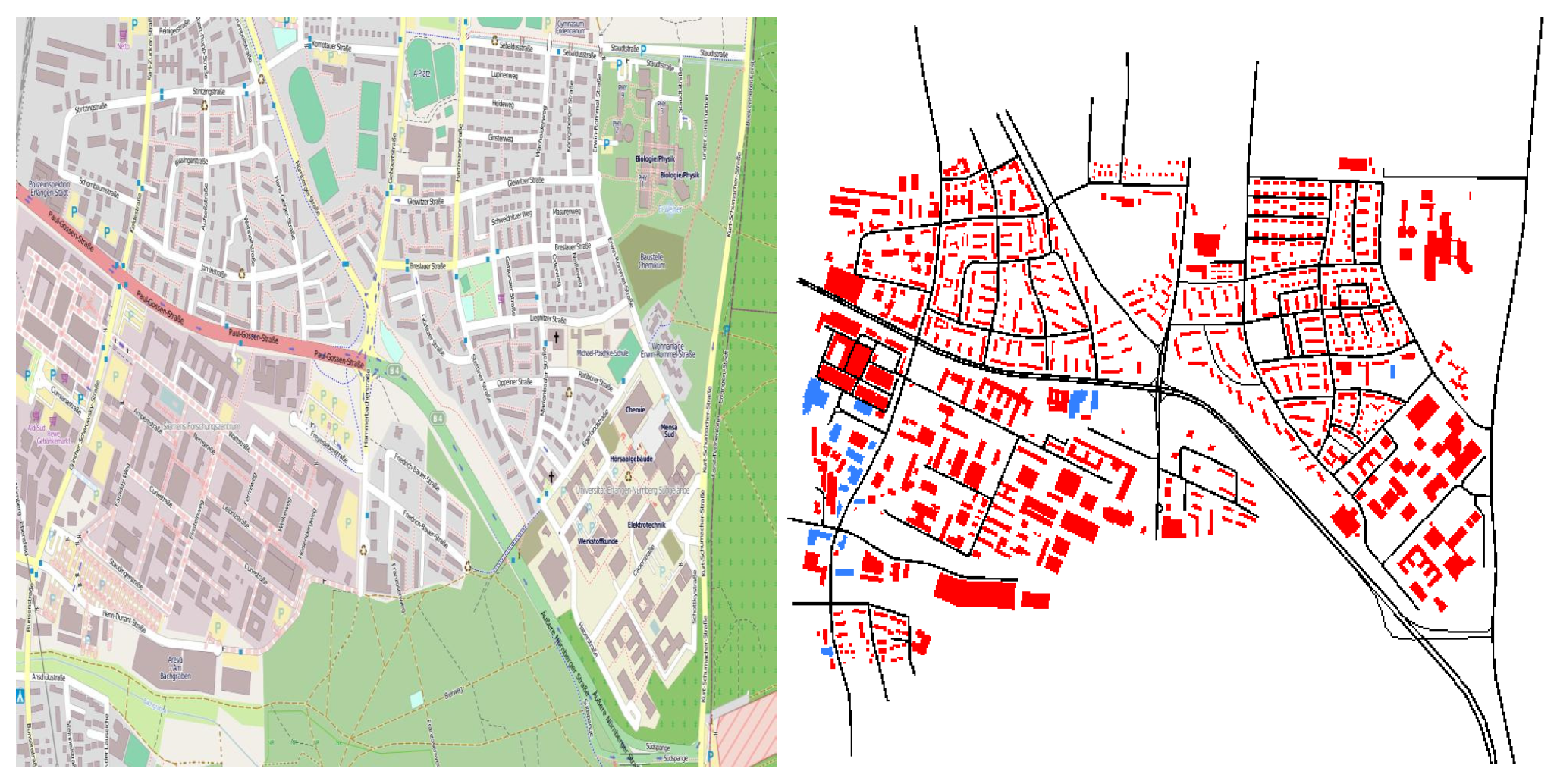
5.1. Simulation Setup
- Overhead: shows the number of beacon packets transmitted in the network by all vehicles during the simulation run;
- Beacon transmitted per vehicle: gives the number of beacon packets transmitted per each vehicle during the simulation run;
- Beacon received: displays the number of beacon packets received per vehicle during the simulation run;
- Total of lost packets: is the sum of both RxTx (receive/transmit) and SNIR (signal to noise plus interference ratio) lost packets; the first one occurs due to the busy communication channel, whereas the second one occurs due to bit errors in received packets;
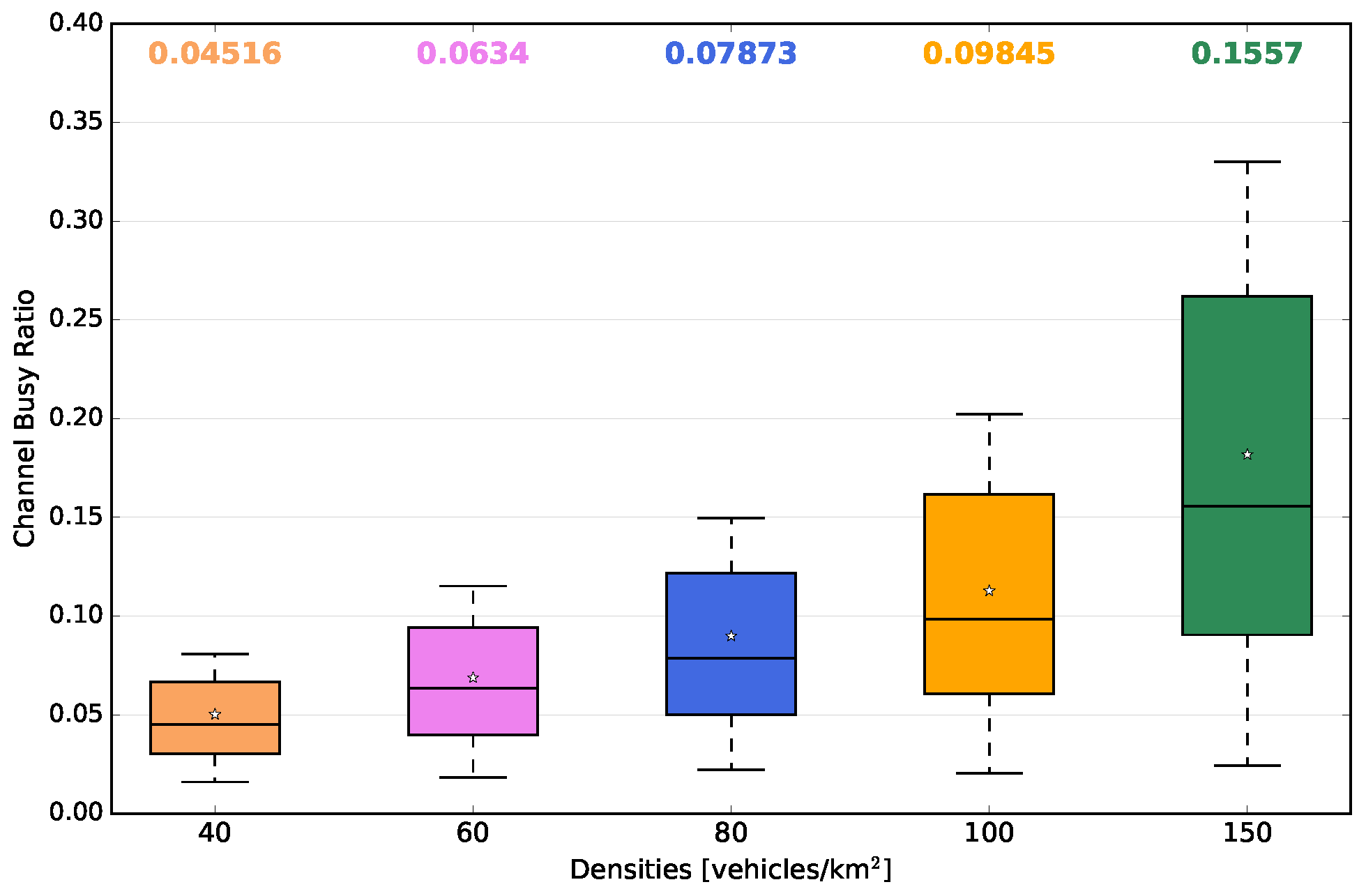
- Channel busy ratio: indicates the fraction of the time in which the channel is identified as busy;
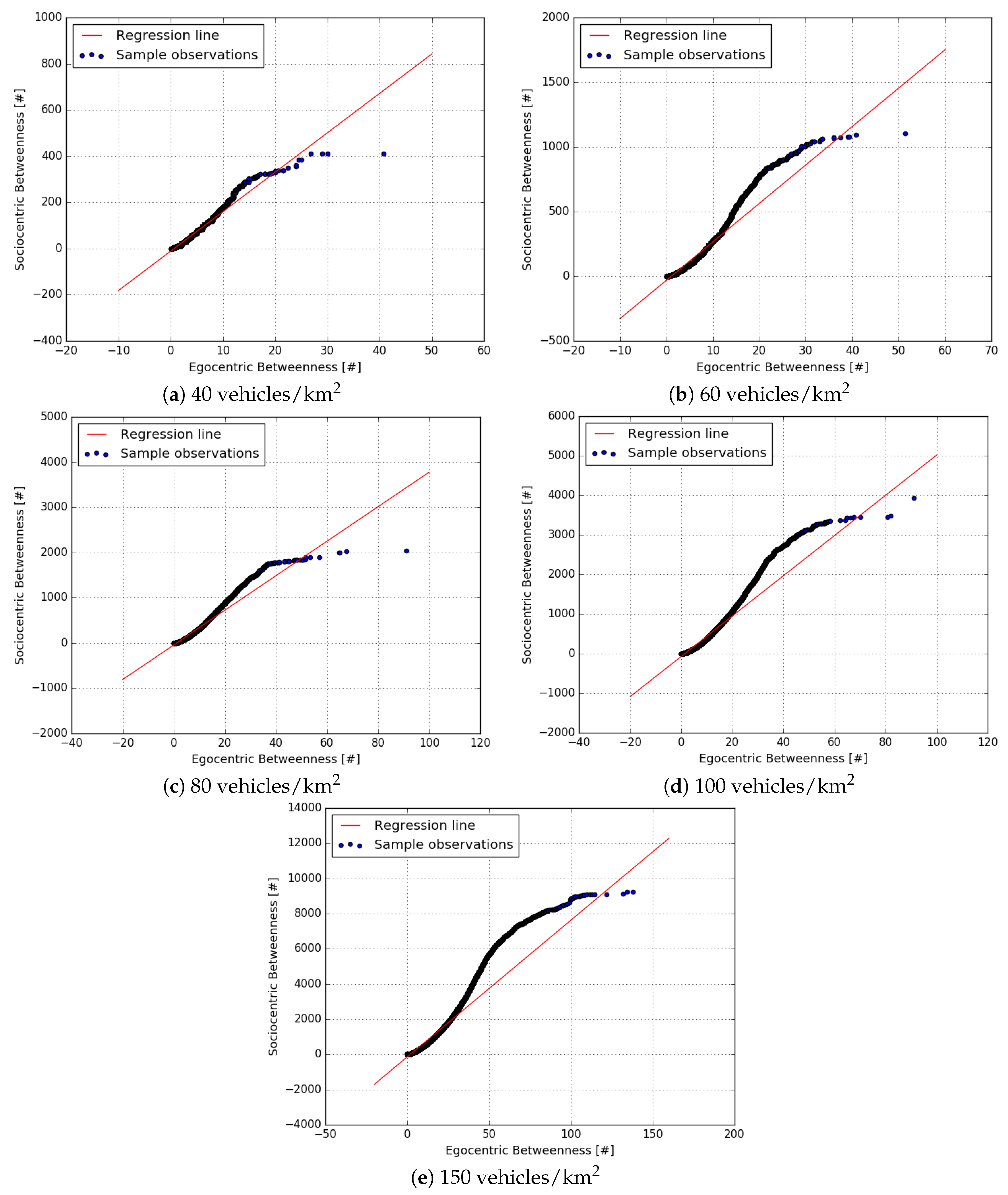
- Regression analysis: is a set of statistical processes to estimate the linear relationships between two datasets;
- Pearson correlation coefficient: expresses the strength of a linear association between two datasets;
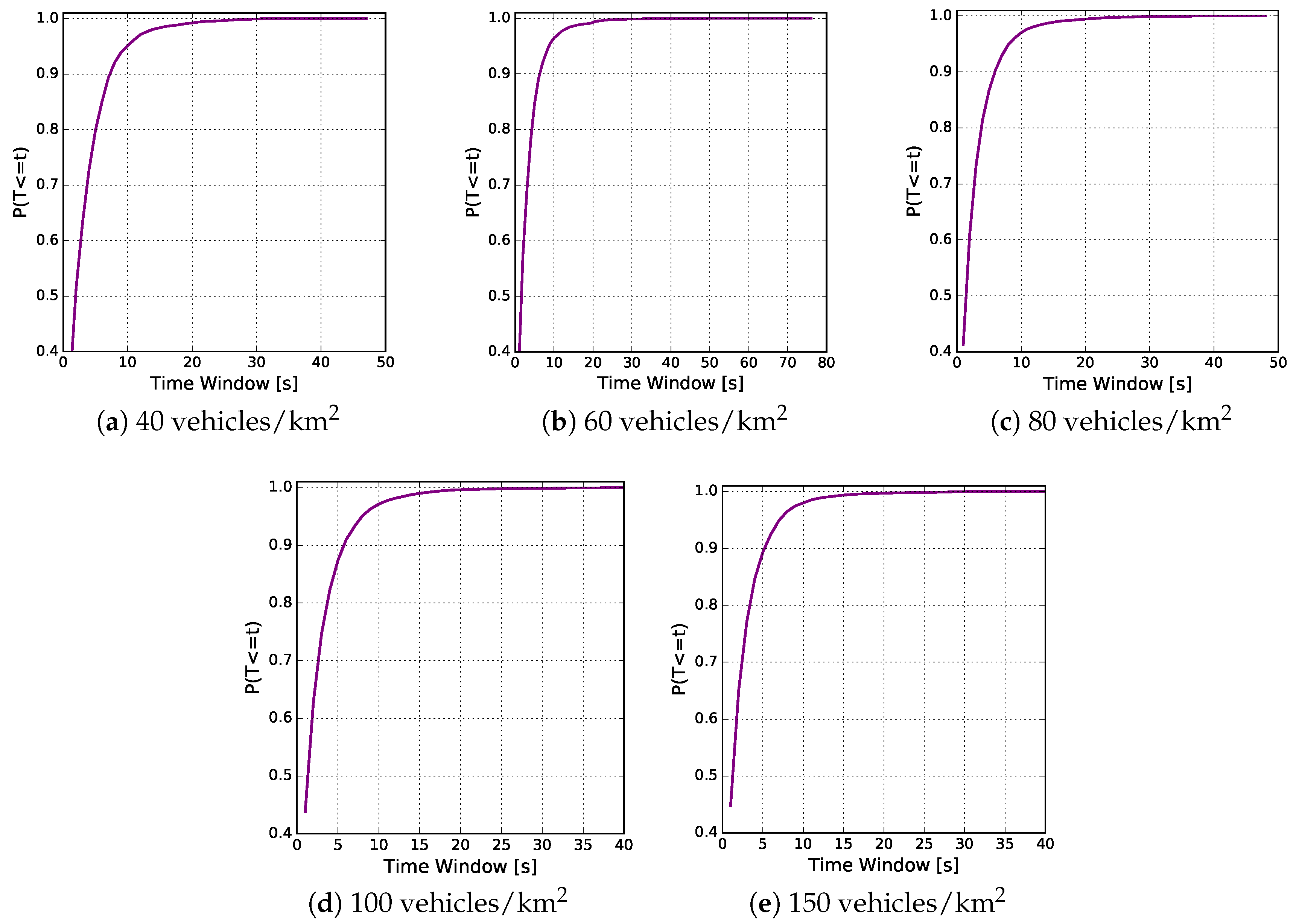
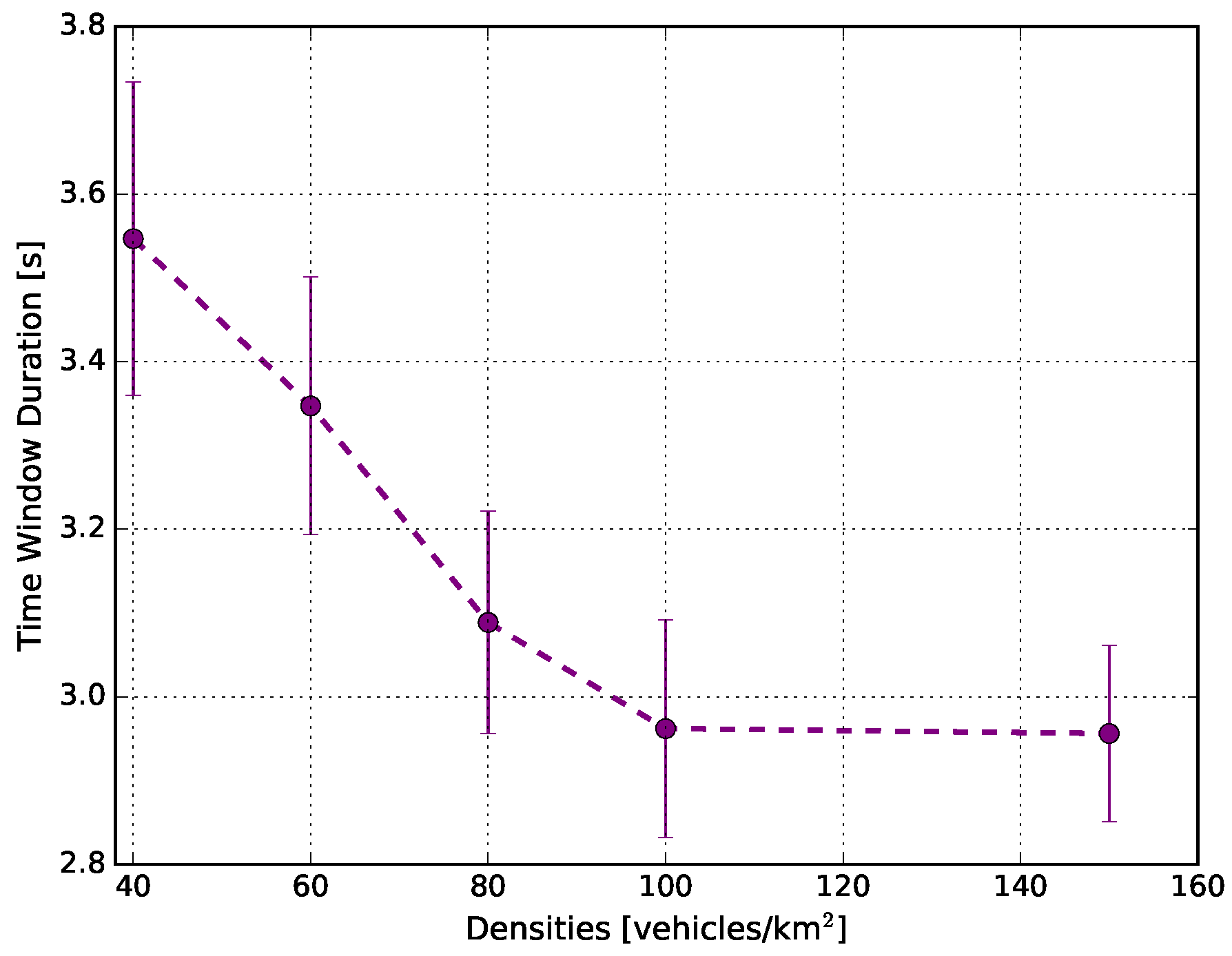
- Window time: points out the smallest window time under which there are no changes in the egocentric betweenness.
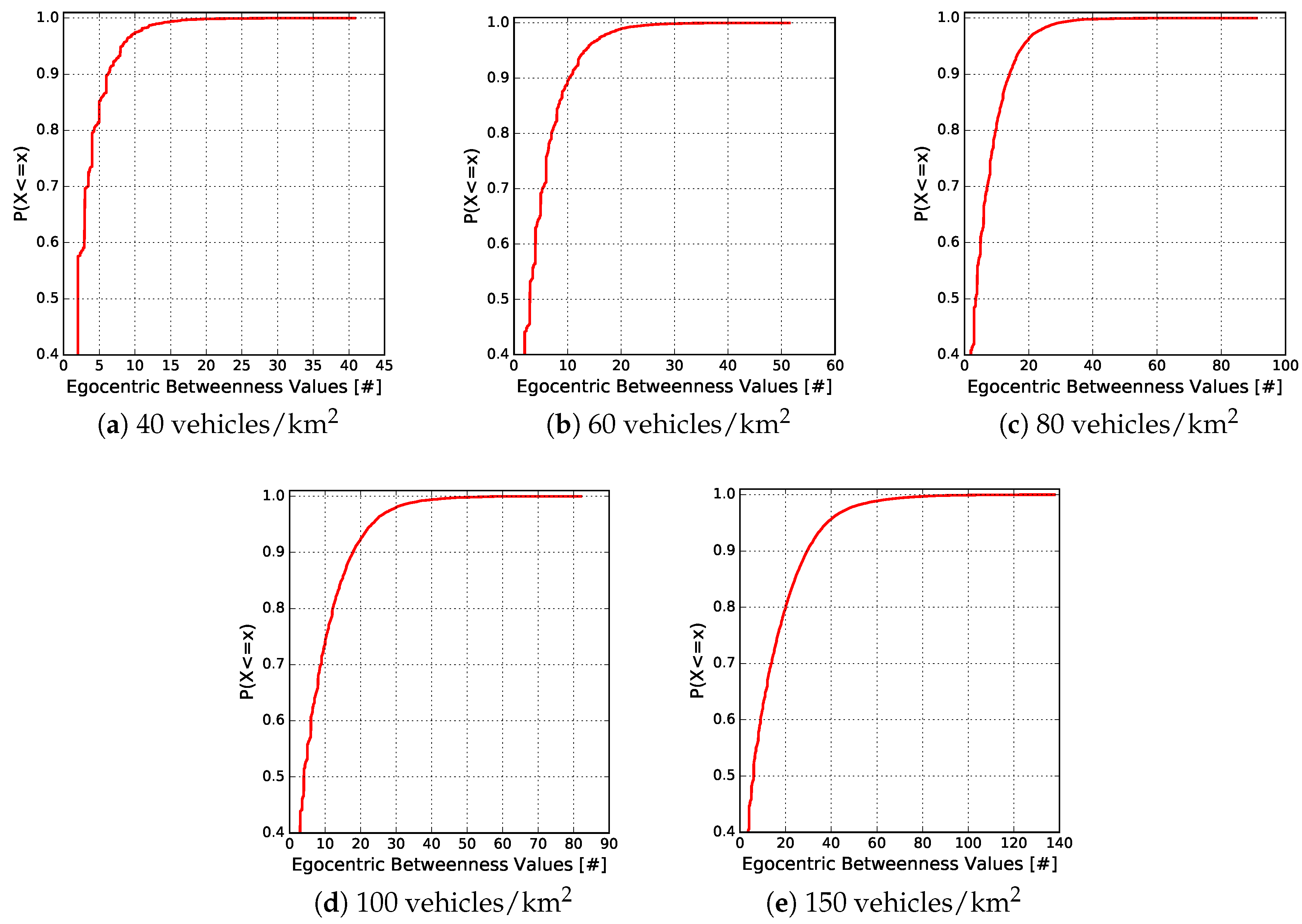
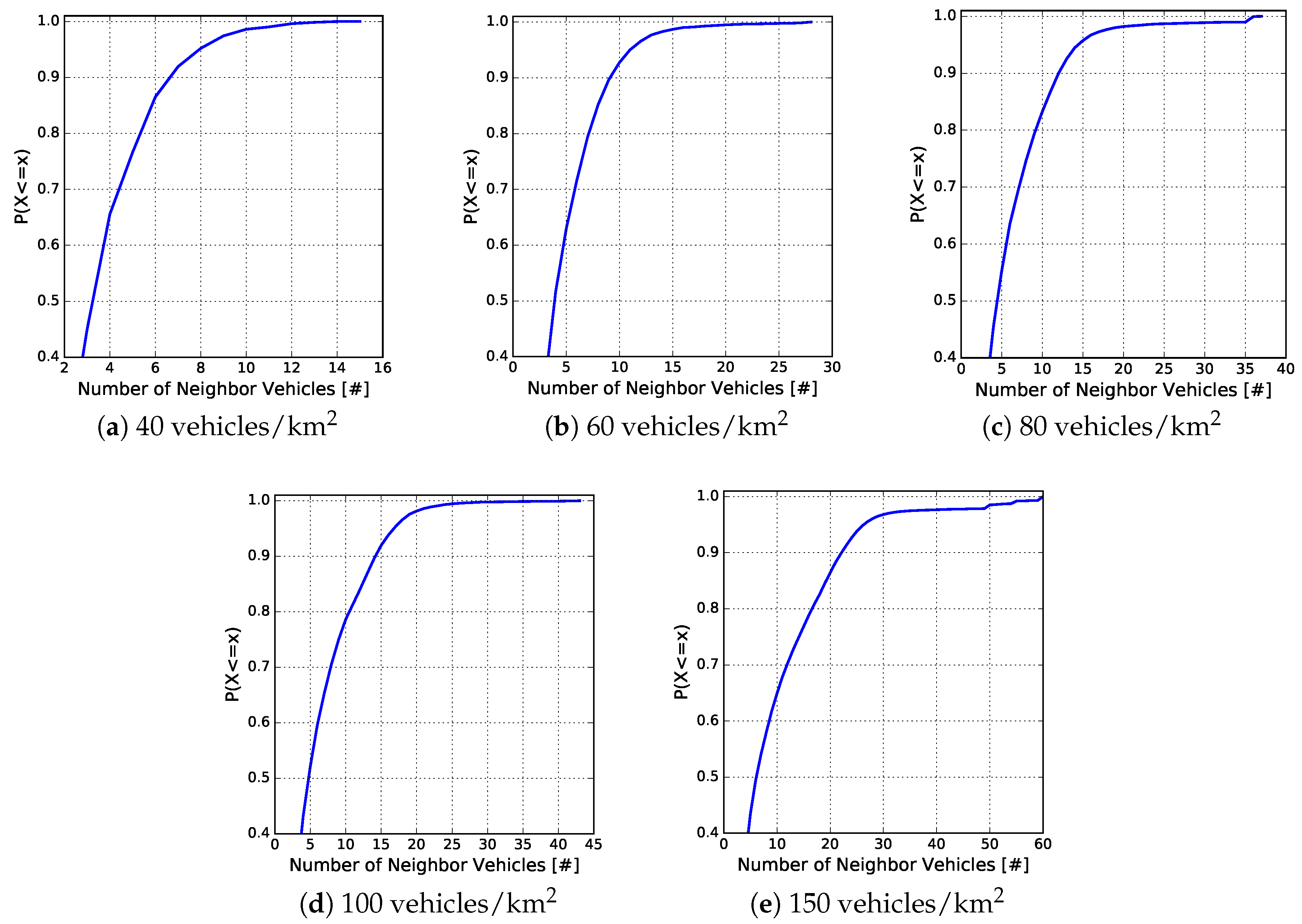
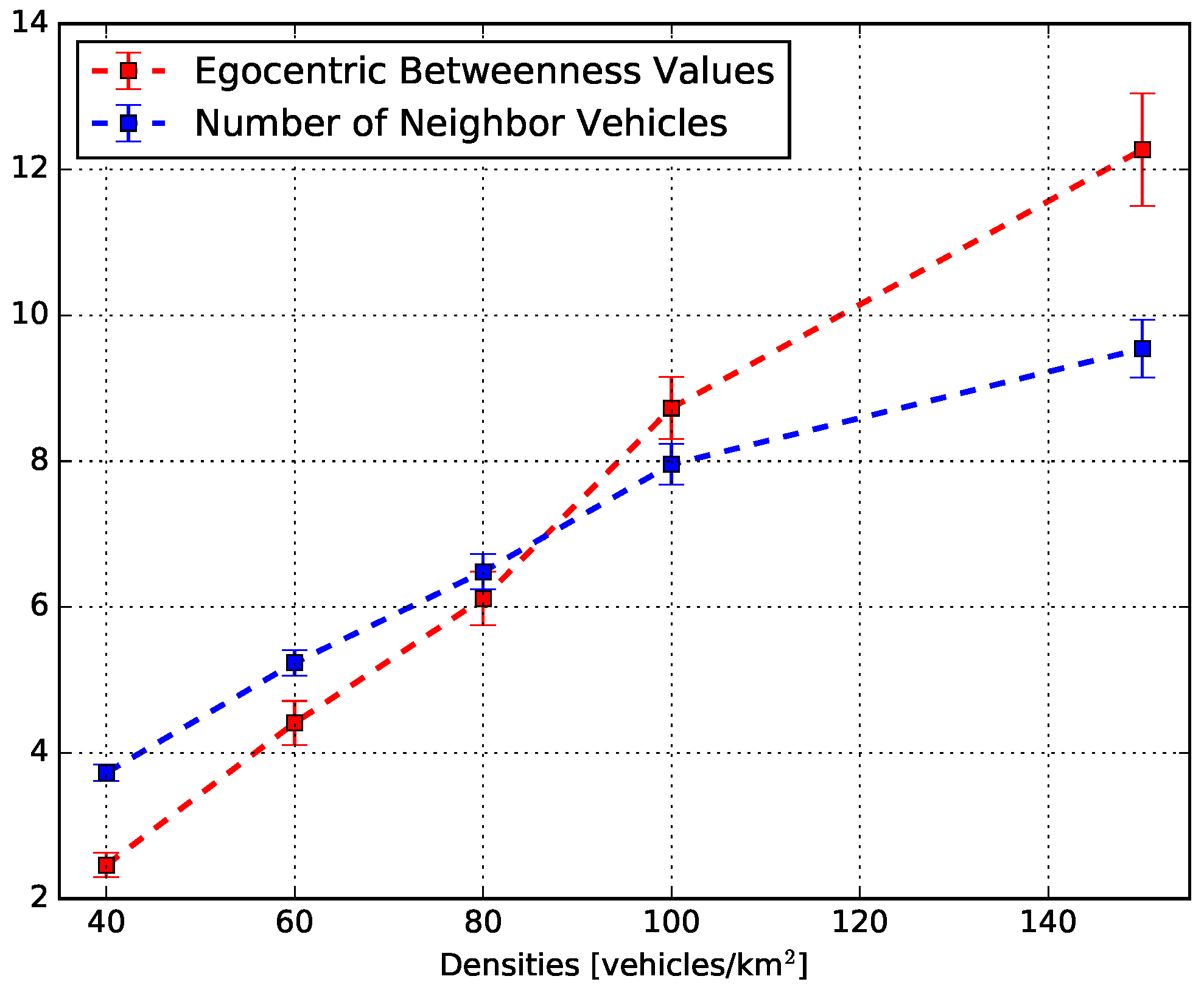
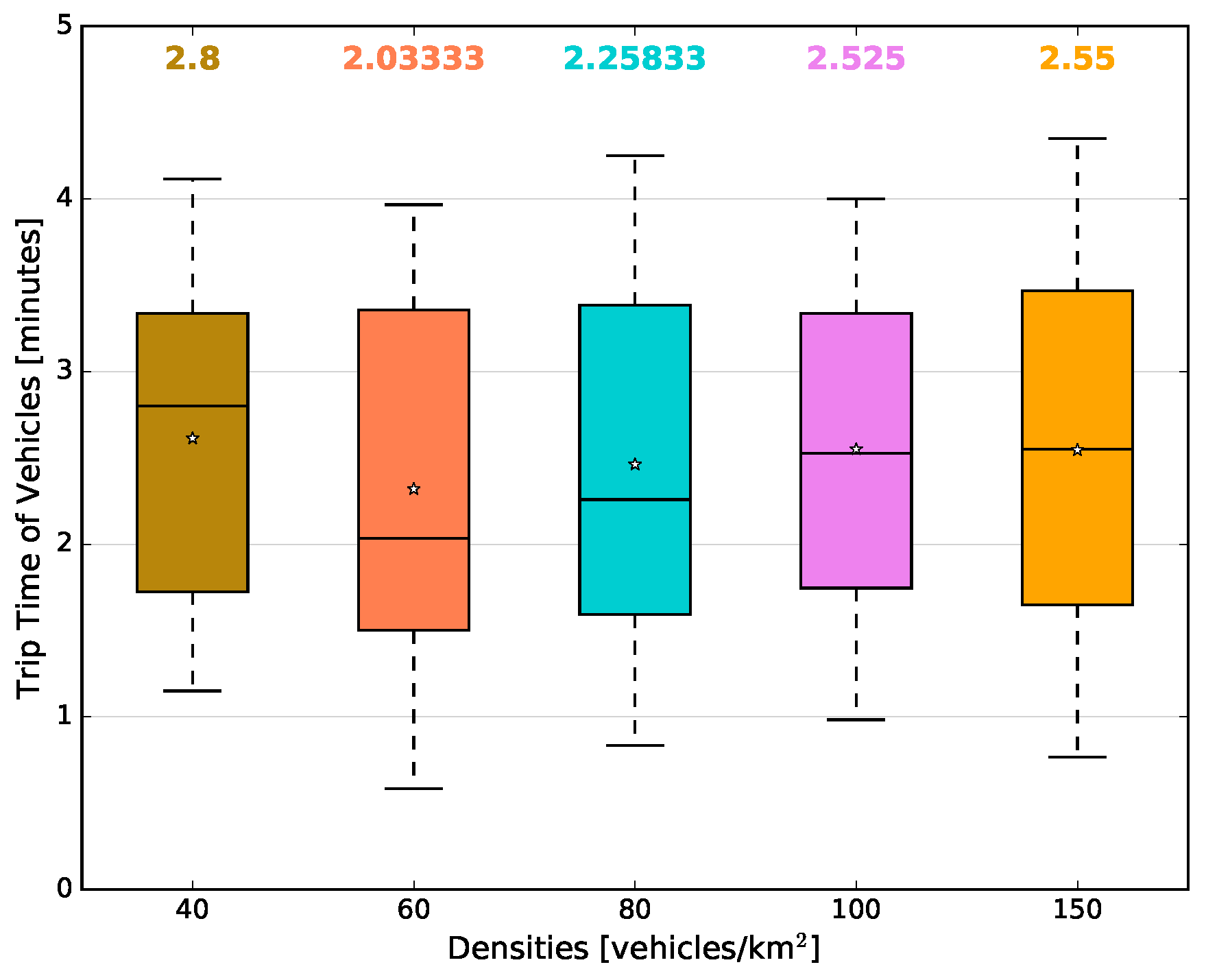
5.2. Simulation Results
6. Egocentric Betweenness Measure as a Vehicle Selection Mechanism for Knowledge Generation about Traffic Congestion
6.1. Vehicle Selection Mechanism
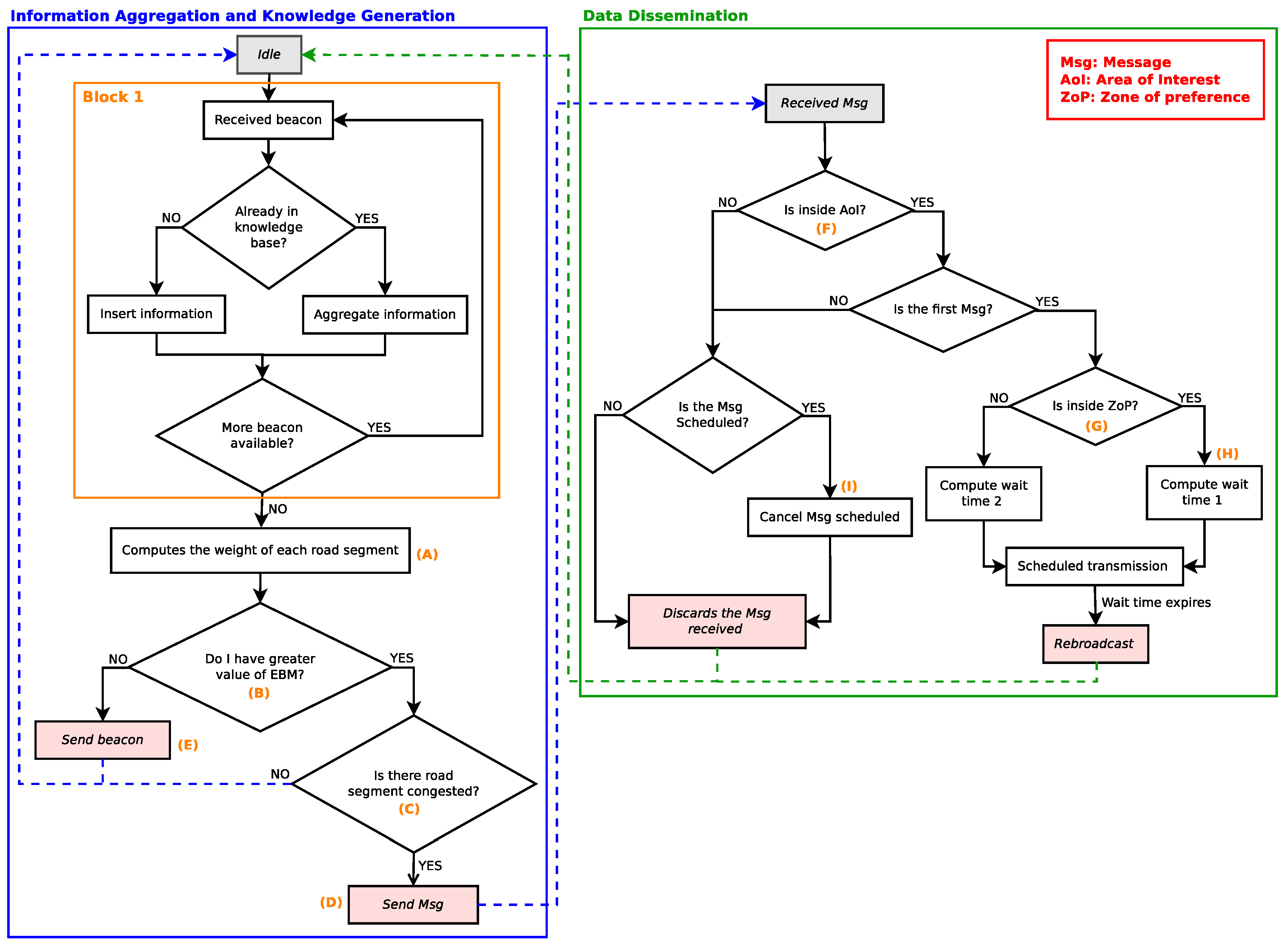
6.2. Knowledge Generation Process and Distribution
6.3. Evaluation Method
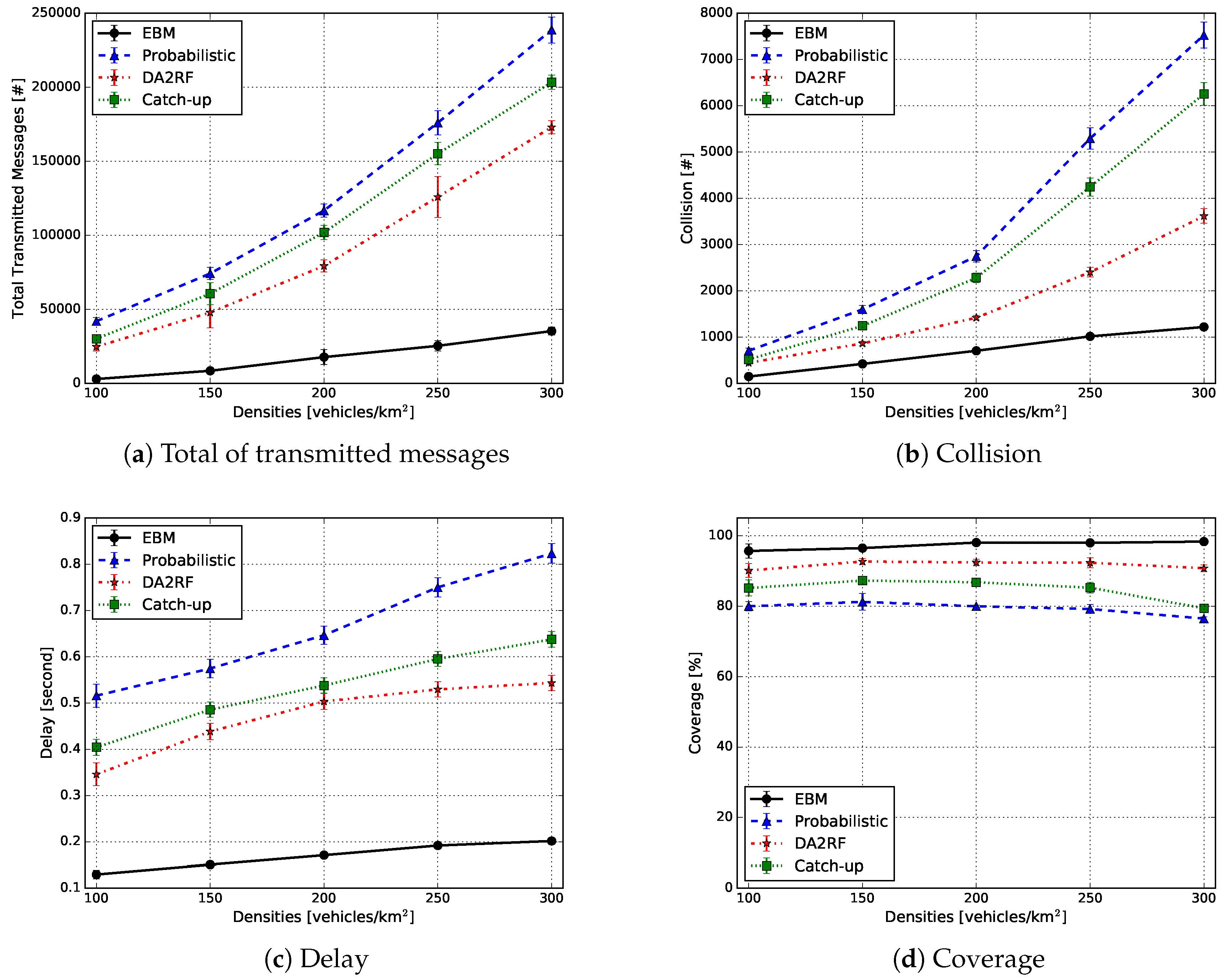
- overhead: measures the total amount of transmitted messages in the network;
- collision: estimates the total number of packet collisions during message transmission;
- delay: measures the time spent in delivering the messages to vehicles;
- coverage: estimates the percentage of messages delivered to the vehicles that are within the scenario.
6.4. Simulation Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wasserman, S.; Faust, K. Social Network Analysis: Methods and Applications; Cambridge University Press: Cambridge, UK, 1994; Volume 8. [Google Scholar]
- Borgatti, S.P.; Everett, M.G. A graph-theoretic perspective on centrality. Soc. Netw. 2006, 28, 466–484. [Google Scholar] [CrossRef]
- Freeman, L.C. Centrality in social networks conceptual clarification. Soc. Netw. 1978, 1, 215–239. [Google Scholar] [CrossRef] [Green Version]
- Newman, M.E. A measure of betweenness centrality based on random walks. Soc. Netw. 2005, 27, 39–54. [Google Scholar] [CrossRef] [Green Version]
- Marsden, P.V. Egocentric and sociocentric measures of network centrality. Soc. Netw. 2002, 24, 407–422. [Google Scholar] [CrossRef]
- Everett, M.; Borgatti, S.P. Ego network betweenness. Soc. Netw. 2005, 27, 31–38. [Google Scholar] [CrossRef] [Green Version]
- Leskovec, J.; Mcauley, J.J. Learning to discover social circles in ego networks. In Proceedings of the 25th International Conference on Neural Information Processing Systems (NIPS’12), Lake Tahoe, NV, USA, 3–6 December 2012; Volume 1, pp. 539–547. [Google Scholar]
- Cuzzocrea, A.; Papadimitriou, A.; Katsaros, D.; Manolopoulos, Y. Edge betweenness centrality: A novel algorithm for QoS-based topology control over wireless sensor networks. J. Netw. Comput. Appl. 2012, 35, 1210–1217. [Google Scholar] [CrossRef]
- Daly, E.M.; Haahr, M. Social network analysis for routing in disconnected delay-tolerant manets. In Proceedings of the 8th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Montreal, QC, Canada, 9–14 September 2007; pp. 32–40. [Google Scholar]
- Vázquez-Rodas, A.; Luis, J. A centrality-based topology control protocol for wireless mesh networks. Ad Hoc Netw. 2015, 24, 34–54. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Cao, X.; Yan, L.; Sung, D. A street-centric opportunistic routing protocol based on link correlation for urban vanets. IEEE Trans. Mob. Comput. 2016, 15, 1586–1599. [Google Scholar] [CrossRef]
- Akabane, A.T.; Villas, L.A.; Madeira, E.R.M. GTO: A broadcast protocol for highway environments over diverse traffic conditions. In Proceedings of the 2014 IEEE 13th International Symposium on Network Computing and Applications (NCA), Cambridge, MA, USA, 21–23 August 2014; pp. 37–40. [Google Scholar]
- Akabane, A.T.; Gomes, R.L.; Pazzi, R.W.; Madeira, E.R.; Villas, L.A. APOLO: A Mobility Pattern Analysis Approach to Improve Urban Mobility. In Proceedings of the 2017 IEEE Global Communications Conference (GLOBECOM 2017), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Li, N.; Martínez-Ortega, J.F.; Díaz, V.H.; Fernandez, J.A.S. Probability Prediction-Based Reliable and Efficient Opportunistic Routing Algorithm for VANETs. IEEE/ACM Trans. Netw. 2018, 26, 1933–1947. [Google Scholar] [CrossRef]
- Sun, G.; Zhang, Y.; Liao, D.; Yu, H.; Du, X.; Guizani, M. Bus Trajectory-Based Street-Centric Routing for Message Delivery in Urban Vehicular Ad hoc Networks. IEEE Trans. Veh. Technol. 2018, 67, 7550–7563. [Google Scholar] [CrossRef]
- Hartenstein, H.; Laberteaux, L. A tutorial survey on vehicular ad hoc networks. IEEE Commun. Mag. 2008, 46, 164–171. [Google Scholar] [CrossRef]
- Hartenstein, H.; Laberteaux, K. VANET Vehicular Applications and Inter-Networking Technologies; John Wiley & Sons: New York, NY, USA, 2009; Volume 1. [Google Scholar]
- Skordylis, A.; Trigoni, N. Efficient data propagation in traffic-monitoring vehicular networks. IEEE Trans. Intell. Transp. Syst. 2011, 12, 680–694. [Google Scholar] [CrossRef]
- Amadeo, M.; Campolo, C.; Molinaro, A. Enhancing IEEE 802.11 p/WAVE to provide infotainment applications in VANETs. Ad Hoc Netw. 2012, 10, 253–269. [Google Scholar] [CrossRef]
- ETSI. Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service; 302 637-2 V1. 3.1-Intelligent Transport Systems (ITS); ETSI: Sophia Antipolis, France, 2014. [Google Scholar]
- DSRC Committee and others. Dedicated Short Range Communications (DSRC) Message Set Dictionary. SAE Standard J. 2009, 2735, 2015. [Google Scholar]
- Schmidt, R.K.; Leinmuller, T.; Schoch, E.; Kargl, F.; Schafer, G. Exploration of adaptive beaconing for efficient intervehicle safety communication. IEEE Netw. 2010, 24, 14–19. [Google Scholar] [CrossRef] [Green Version]
- Lochert, C.; Scheuermann, B.; Mauve, M. A probabilistic method for cooperative hierarchical aggregation of data in VANETs. Ad Hoc Netw. 2010, 8, 518–530. [Google Scholar] [CrossRef] [Green Version]
- Flajolet, P.; Martin, G.N. Probabilistic counting algorithms for data base applications. J. Comput. Syst. Sci. 1985, 31, 182–209. [Google Scholar] [CrossRef]
- Yu, B.; Xu, C.Z.; Guo, M. Adaptive forwarding delay control for VANET data aggregation. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 11–18. [Google Scholar]
- Yuan, Y.; Luo, J.; Yan, W.; Zhao, T.; Lu, S. DA2RF: A data aggregation algorithm by restricting forwarders for VANETs. In Proceedings of the 2014 International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, 3–6 February 2014; pp. 393–397. [Google Scholar]
- Knoke, D.; Yang, S. Social Network Analysis; Sage: New York, NY, USA, 2008; Volume 154. [Google Scholar]
- Barrat, A.; Barthelemy, M.; Pastor-Satorras, R.; Vespignani, A. The architecture of complex weighted networks. Proc. Natl. Acad. Sci. USA 2004, 101, 3747–3752. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brandes, U. On variants of shortest-path betweenness centrality and their generic computation. Soc. Netw. 2008, 30, 136–145. [Google Scholar] [CrossRef] [Green Version]
- Brandes, U. A faster algorithm for betweenness centrality. J. Math. Sociol. 2001, 25, 163–177. [Google Scholar] [CrossRef]
- Varga, A. The OMNeT++ discrete event simulation system. In Proceedings of the European Simulation Multiconference (ESM2001), Prague, Czech Republic, 6–9 June 2001; p. 185. [Google Scholar]
- Krajzewicz, D.; Hertkorn, G.; Rossel, C.; Wagner, P. Sumo (simulation of urban mobility). In Proceedings of the 4th Middle East Symposium on Simulation and Modelling, Sharjah, UAE, 28–30 October 2002; pp. 183–187. [Google Scholar]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis. IEEE Trans. Mob. Comput. 2011, 10, 3–15. [Google Scholar] [CrossRef] [Green Version]
- Krauß, S. Microscopic Modeling of Traffic Flow: Investigation of Collision Free Vehicle Dynamics. Ph.D. Thesis, University of Cologne, Köln, Germany, 1998. [Google Scholar]
- Dutot, A.; Guinand, F.; Olivier, D.; Pigné, Y. Graphstream: A tool for bridging the gap between complex systems and dynamic graphs. In Proceedings of the Emergent Properties in Natural and Artificial Complex Systems, Satellite Conference within the 4th European Conference on Complex Systems (ECCS’2007), Dresden, Germany, 4–5 October 2007. [Google Scholar]
- Yang, Q.; Lim, A.; Li, S.; Fang, J.; Agrawal, P. ACAR: Adaptive connectivity aware routing for vehicular ad hoc networks in city scenarios. Mob. Netw. Appl. 2010, 15, 36–60. [Google Scholar] [CrossRef]
- Shafiee, K.; Leung, V.C. Connectivity-aware minimum-delay geographic routing with vehicle tracking in VANETs. Ad Hoc Netw. 2011, 9, 131–141. [Google Scholar] [CrossRef]
- Cheng, L.; Panichpapiboon, S. Effects of intervehicle spacing distributions on connectivity of VANET: A case study from measured highway traffic. IEEE Commun. Mag. 2012, 50, 90–97. [Google Scholar] [CrossRef]
- Sommer, C.; Joerer, S.; Dressler, F. On the Applicability of Two-Ray Path Loss Models for Vehicular Network Simulation. In Proceedings of the IEEE Vehicular Networking Conference (VNC ’12), Seoul, Korea, 14–16 November 2012; pp. 64–69. [Google Scholar]
- IEEE Standard Association. IEEE Guide for Wireless Access in Vehicular Environments (WAVE) Architecture; IEEE: Piscataway, NJ, USA, 2013; p. 1609. [Google Scholar]
- Elefteriadou, L.A. The Highway Capacity Manual 6th Edition: A Guide for Multimodal Mobility Analysis; National Research Council, Transportation Research Board/National Academy of Sciences: Washington, DC, USA, 2016. [Google Scholar]
- Zhang, X.; Yan, L.; Zhang, H.; Sung, D.K. A Concurrent Transmission Based Broadcast Scheme for Urban VANETs. IEEE Trans. Mob. Comput. 2018. [Google Scholar] [CrossRef]
- Villas, L.A.; Boukerche, A.; Maia, G.; Pazzi, R.W.; Loureiro, A.A. Drive: An efficient and robust data dissemination protocol for highway and urban vehicular ad hoc networks. Comput. Netw. 2014, 75, 381–394. [Google Scholar] [CrossRef]
- Akabane, A.T.; Villas, L.A.; Madeira, E.R.M. An adaptive solution for data dissemination under diverse road traffic conditions in urban scenarios. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 1654–1659. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Betweenness Centrality | |||
|---|---|---|---|
| Sociocentric | Egocentric | ||
| Nodes | W1 | 3.75 | 0.83 |
| W2 | 0.25 | 0.25 | |
| W3 | 3.75 | 0.83 | |
| W4 | 3.75 | 0.83 | |
| W5 | 30.00 | 4.00 | |
| W6 | 0.00 | 0.00 | |
| W7 | 28.33 | 4.33 | |
| W8 | 0.33 | 0.33 | |
| W9 | 0.33 | 0.33 | |
| S1 | 1.50 | 0.25 | |
| S2 | 0.00 | 0.00 | |
| S4 | 0.00 | 0.00 | |
| I1 | 0.00 | 0.00 | |
| I3 | 0.00 | 0.00 | |
| Measure | Time Complexity | Message Overhead |
|---|---|---|
| Parameter | Value |
|---|---|
| Density of vehicles | 40–150 vehicles/km |
| MAC layer | 802.11 p |
| Channel | 178 (5.89 GHz) |
| Bandwidth | 10 MHz |
| Transmission power | 0.98 mW |
| Bitrate | 6 Mbps |
| Sensitivity | −82 dBm |
| Transmission range | 200 m |
| Beacon transmission frequency | 1 Hz |
| Simulation time | 350 s |
| Confidence interval | 95% |
| Density (vehicles/km) | PCC |
|---|---|
| 40 | 0.983 |
| 60 | 0.962 |
| 80 | 0.971 |
| 100 | 0.964 |
| 150 | 0.953 |
| Level of Service | Traffic Classification | |
|---|---|---|
| A | Free flow | (1.0∼0.9] |
| B | Reasonably free flow | (0.9∼0.7] |
| C | Stable flow | (0.7∼0.5] |
| D | Approaching unstable flow | (0.5∼0.4] |
| E | Unstable flow | (0.4∼0.33] |
| F | Forced or breakdown flow | (0.33∼0.0] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akabane, A.T.; Immich, R.; Pazzi, R.W.; Madeira, E.R.M.; Villas, L.A. Distributed Egocentric Betweenness Measure as a Vehicle Selection Mechanism in VANETs: A Performance Evaluation Study. Sensors 2018, 18, 2731. https://doi.org/10.3390/s18082731
Akabane AT, Immich R, Pazzi RW, Madeira ERM, Villas LA. Distributed Egocentric Betweenness Measure as a Vehicle Selection Mechanism in VANETs: A Performance Evaluation Study. Sensors. 2018; 18(8):2731. https://doi.org/10.3390/s18082731
Chicago/Turabian StyleAkabane, Ademar T., Roger Immich, Richard W. Pazzi, Edmundo R. M. Madeira, and Leandro A. Villas. 2018. "Distributed Egocentric Betweenness Measure as a Vehicle Selection Mechanism in VANETs: A Performance Evaluation Study" Sensors 18, no. 8: 2731. https://doi.org/10.3390/s18082731
APA StyleAkabane, A. T., Immich, R., Pazzi, R. W., Madeira, E. R. M., & Villas, L. A. (2018). Distributed Egocentric Betweenness Measure as a Vehicle Selection Mechanism in VANETs: A Performance Evaluation Study. Sensors, 18(8), 2731. https://doi.org/10.3390/s18082731