1. Introduction
Wireless sensor networks are widely used in many Internet of Things (IoTs) applications, including video monitoring, traffic control, structural health monitoring, radiation detection, forest fire and volcanor monitoing, etc. [
1,
2,
3,
4,
5]. The energy consumption of sensors on data transmission however is very high. Although many techniques have been proposed to save sensor energy, such as dynamic duty cycle [
6,
7,
8], sensors will run out of their energy eventually.
Many researchers proposed to prolong sensor lifetimes by enabling them to harvest energy from their surrounding environments, such as solar energy, wind energy, etc. [
9,
10]. However, the energy harvesting rates of sensors are low and unstable, due to their dynamic surrounding environments. For example, it is reported that the energy generating rates in sunny, cloudy and shadowy days can vary by up to three orders of magnitude in a solar harvesting system [
11]. Such unpredictability and intermittency pose challenges in the efficient usage of harvested energy for various monitoring or surveillance tasks [
12]. Recently, some pioneering researchers [
13,
14,
15,
16] proposed a revolutionary way to replenish sensor energy, that is, employing a mobile vehicle equipped with a charging device to move in the vicinity of a lifetime-critical sensor, and charge it via wireless energy transfer [
14]. By doing so, the charging rate is high and stable.
A lot of attention has been paid to the vehicle charging scheduling for wireless sensor networks. Most of these studies assumed that sensors are powered with off-the-shelf batteries [
15,
17,
18,
19,
20,
21,
22,
23,
24,
25], such as Lithium batteries, we here abbreviate an off-the-shelf battery powered sensors by an off-the-shelf sensor. The price of such a battery is only about a few dollars [
26]; however, it usually takes some non-trivial time to fully charge one, e.g., 30–80 min [
26]. Therefore, these studies mainly focused on shortening sensor dead durations due to the long charging time of off-the-shelf sensors.
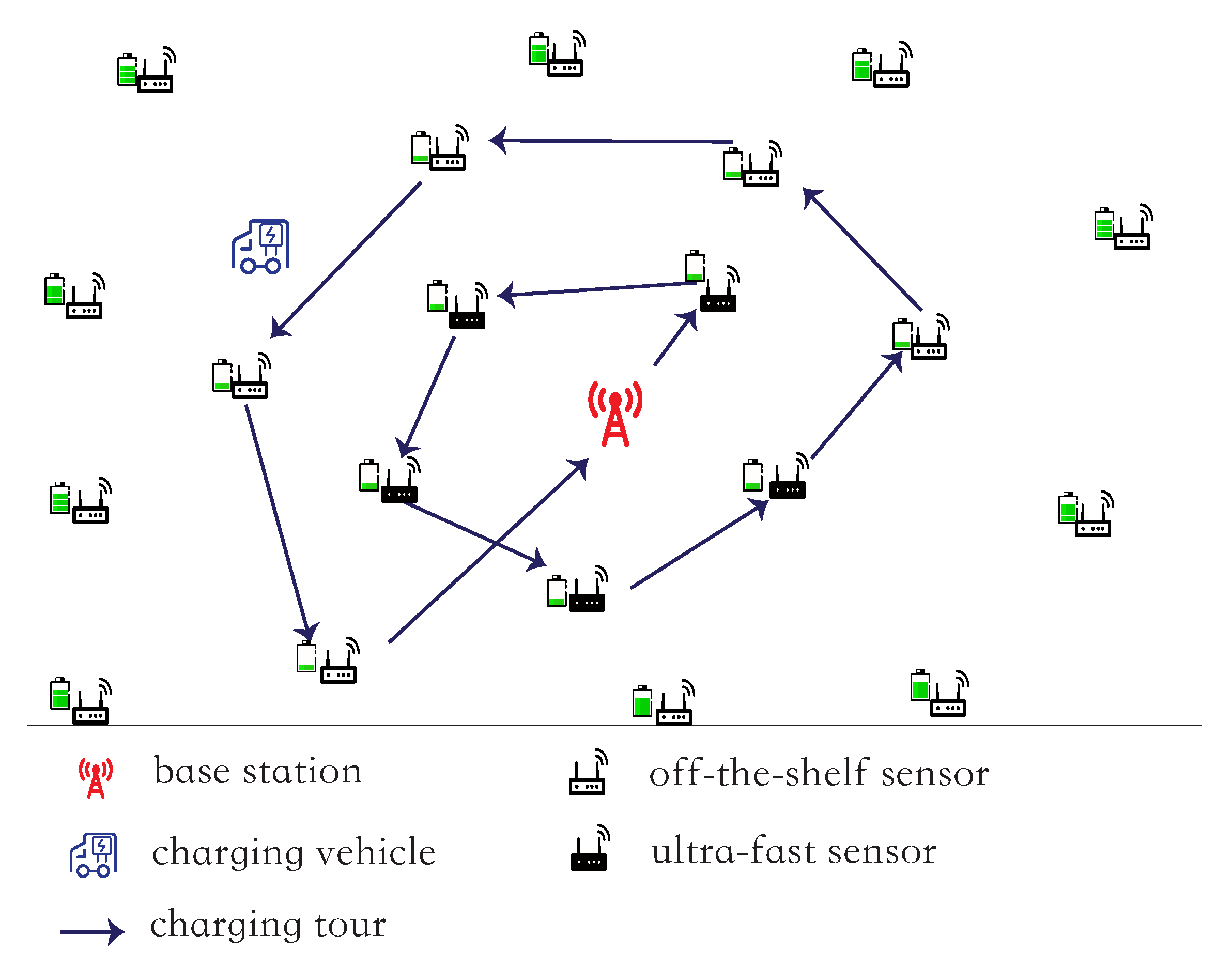
Although excellent studies have been conducted for shorten sensor dead durations, some sensors still expire their energy for some durations, as the charging time of a sensor is non-trivial (e.g., 30–80 min). For example, in
Figure 1a, assume that there are four off-the-shelf sensors
,
,
and
in a sensor network and three of them, i.e.,
,
,
, will run out of their energy soon. Assume that the residual lifetime
of each lifetime-critical sensor
is 40 min, i.e.,
min, and it takes an hour to fully charge each of them and their charging sequence is
. For the sake of convenience, we ignore the traveling time of the charging vehicle, as it is usually much shorter than the sensor charging time [
27]. It can be seen that the dead durations of sensors
,
,
are 0,
min, and
min, respectively.
On the other hand, other researchers [
12,
27,
28,
29,
30] assumed that every sensor is powered with an ultra-fast charging battery, and it only takes a trivial time to fully charge such a battery, e.g., within 1 min [
27,
28], we here abbreviate an ultra-fast charging battery powered sensor by an ultra-fast sensor. Therefore, they usually ignored the sensor charging time when scheduling charging vehicles.
It is obvious that the adoption of ultra-fast sensors can significantly shorten sensor dead durations or even avoid their energy expirations. For example, in
Figure 1a, if every sensor is powered with an ultra-fast charging battery, the energy expirations of sensors
,
,
can be avoided, as the residual lifetime of each of these sensors is 40 min and it takes a very short time to charge such a sensor, e.g., 1 min.
It can be seen that, although the adoption of off-the-shelf sensors is cheap, but the dead durations of sensors may be long due to the long charging time of the sensors. Contrarily, the adoption of many ultra-fast sensors can significantly shorten sensor dead durations, but the adoption will incur a high purchasing cost. For example, the price of an ultra-fast charging battery is usually about 30–40 dollars, which is about ten times the cost of an off-the-shelf battery, e.g., a Lithium battery with the same capacity costs only 2–3 dollars [
27,
31]. Therefore, it is unrealistic to adopt many ultra-fast sensors in a wireless sensor network.
In this paper, we propose a novel heterogeneous sensor network model, in which there are only a few ultra-fast sensors and many low-cost off-the-shelf sensors in a sensor network. The ultra-fast sensors are deployed at some strategic locations near to the base station, as the sensors close to the base station need to relay a large amount of data from other remote sensors.
We here illustrate a heterogeneous sensor network. In
Figure 1b, we only deploy one ultra-fast sensor
, instead of three. We now consider the charging order
again in
Figure 1b, where the residual lifetimes of the three lifetime-critical sensors
,
,
are 40 min, and it takes 1 min to charge the ultra-fast sensor
and an hour to fully charge either off-the-shelf sensor
or
. Then, the dead durations of
,
,
are reduced to 0, 0, and
21 min, which are shorter than the sensor dead durations with only off-the-shelf sensors in
Figure 1a, i.e., 0, 20 min, and 80 min.
We, however, observe that we can further reduce sensor dead durations by jointly considering charging scheduling and routing allocation in the heterogeneous sensor network. We can enable ultra-fast sensors to relay more data than off-the-shelf sensors, since the former can be quickly charged. For example, sensor
can forward its data to the ultra-fast sensor
, rather than
(see
Figure 1c).
Then, the residual lifetime of is shortened from 40 min to, e.g., 20 min, while the residual lifetime of is prolonged from 40 min to, e.g., 80 min. In addition, the residual lifetime of sensor remains 40 min, as its routing load does not change. If we still charge the three lifetime-critical sensors in the order of , none of them runs out of their energy before their energy replenishments, as their start charging time points are 0, 1st, and 61th min, respectively, while their residual lifetimes are 20, 40, and 80 min, respectively.
In this paper, we propose a novel heterogeneous network model, where a sensor network consists of only a few ultra-fast sensors and many low-cost off-the-shelf sensors. Then, the cost of deploying such a sensor network is low, due to the limited number of deployed ultra-fast sensors. On the other hand, we can significantly shorten sensor dead durations by not only scheduling the charging vehicle but also allocating routing among sensors smartly.
The main contributions in this paper are highlighted as follows:
Unlike existing studies that either assumed that all sensors are powered with low-cost off-the-shelf batteries, or assumed that every sensor is equipped with a high-cost ultra-fast charging battery, in this paper, we propose a novel heterogeneous sensor network model, where a sensor network consists of a few ultra-fast sensors and many low-cost off-the-shelf sensors. The deployment cost of such a network then is very low.
Under this novel network model, we study a fundamental problem of joint charging scheduling and routing allocation, such that the longest sensor dead duration is minimized. We also propose an efficient algorithm for this problem.
We finally evaluate the performance of the proposed algorithm through extensive simulation experiments. The experimental results show that the proposed algorithm is very promising, and the longest sensor dead duration by it is only 10% of those by existing algorithms.
The rest of this paper is organized as follows:
Section 2 defines the network model, charging model and the problem,
Section 3 presents the algorithm for the problem,
Section 4 analyzes the proposed algorithm,
Section 5 evaluates the performance of the proposed algorithm through extensive simulation experiments,
Section 6 introduces the related work. Finally,
Section 7 concludes this paper.
2. Preliminaries
In this section, we first introduce a novel heterogeneous network model and then present the charging model. We finally define the problem.
2.1. A Novel Heterogeneous Network Model
We consider a wireless sensor network , which is deployed in a two-dimensional area, where is a set of sensors in the network, and b is a base station for collecting data from all sensors.
We assume that there are two types of sensors in the network. The first type of sensors are powered by off-the-shelf batteries, e.g., Lithium battery, and it usually takes a while to fully charge such a sensor, e.g., 30–80 min [
26]. The other type of sensors are powered by ultra-fast charging batteries, and it takes only a very short time to fully charge such one, e.g., 1 min [
27]. Assume that there are
off-the-shelf sensors
and
ultra-fast sensors
. Let
and
. Then,
. Notice that the number
of ultra-fast sensors usually is very small, e.g.,
, as the cost of each ultra-fast charging battery is not cheap. Denote by
and
the energy capacities of a sensor in
and
, respectively.
We now consider the placement of sensors. We assume that the off-the-shelf sensors are randomly deployed. On the other hand, since the communication range of a sensor is limited, sensors close to the base station have to relay sensing data from other remote sensors. Therefore, the former sensors consume more their energy on relaying data than the latter ones. We thus assume that the ultra-fast sensors are deployed at some strategic locations near to the base station, as they can be quickly charged. For example, the ultra-fast sensor can be co-located with the most energy-consuming off-the-shelf sensors.
We assume that there is an edge in for any two nodes and in if they are within the transmission range of each other. Denote by the set of neighbor nodes of each node in , i.e, .
Assume that each sensor
generates data at a rate of
, and the generated data will be relayed to the base station via a given routing path, e.g., the delay-aware routing [
32,
33]. Each sensor can monitor its residual energy level and estimate its energy consumption rate. Denote by
(
) the amount of residual energy of sensor
at time
t. On the other hand, following [
34], the energy consumption rate of sensor
at time
t is
, where
,
,
are the energy consumptions for data sensing, data transmission and data reception per unit data, respectively,
and
are the data transmission rates from sensors
to
, and from
to
, at time
t, respectively,
,
is the distance-independence constant term,
is a coefficient of the distance-independence term,
is the distance between sensor
and sensor
, and
is the path-loss index. Then, the residual lifetime
of sensor
at time
t is
.
2.2. Charging Model
As the energy stored in every sensor battery is limited, it will run out of its energy due to data sensing, data transmission and data reception. To provide controllable and perpetual energy to sensors, we employ a charging vehicle equipped with a recharging device to replenish sensor energy. Denote by and the charging rates of the vehicle for charging an off-the-shelf sensor and an ultra-fast sensor, respectively. We assume that the vehicle can move at a speed of s m/s.
The energy consumptions of different sensors vary significantly, i.e., some sensors may have little energy left while the others consume only a small fraction of their energy. Then, it is unnecessary for the vehicle to charge all sensors in each round, and sensors should be charged in an on-demand manner. To this end, each sensor sends a charging request to the base station once its residual lifetime falls below a given lifetime threshold at some time , e.g., h. After receiving the charging request, the base station starts a new charging round by dispatching the vehicle to charge lifetime-critical sensors.
Let V be the set of to-be-charged sensors in the current charging round. There are two types of sensors in set V, the lifetime-critical off-the-shelf sensors in and the ultra-fast sensors in , i.e., , where an off-the-shelf sensor is contained in if its residual lifetime at time is no longer than , i.e., , is a given constant with , and is the lifetime-critical threshold. Notice that every ultra-fast sensor in is contained in the set of to-be-charged sensors V, as they are deployed at strategic locations where data traffics are extremely heavy. Moreover, it only takes a very short time to fully charge an ultra-fast sensor, and the number of ultra-fast sensors usually is small, e.g., .
The base station will find a closed charging tour
C of the charging vehicle for the sensors in
V and allocate routing for the network
. Let
, where
. Then, the charging vehicle is dispatched to fully charge the sensors in
V along tour
C one by one (see
Figure 2). Once all sensors in
V is fully charged, the vehicle will return to the base station and recharge itself for the next charging round. Denote by
T the duration that the vehicle spends for charging sensors along tour
C, i.e,
, which consists of the time spent on vehicle traveling, charging the lifetime-critical off-the-shelf sensors in
, and charging the ultra-fast sensors in
.
2.3. Problem Definition
Many applications of sensor networks are sensitive to the data collection delay, and they usually require a continuous data collection, such as the sensor networks for video monitoring, radiation detection and forest fire detection [
1,
35,
36]. For example, in a sensor network for radiation detection, once the energy depletion of a sensor lasts for a few hours, a radiation release cannot be detected in real time and the radiation may quickly spread to the degree of out of control and thus lead to a disaster. Therefore, we must shorten the dead durations of sensors as much as possible, due to their energy depletions. The objective of this paper is thus to find a charging tour
C of the vehicle for charging sensors in
V and allocate routing for each link
in network
, such that the longest dead duration of sensors in
V is minimized. Let
be the start charging time of sensor
in
V when the vehicle starts to charge sensor
in tour
C; the dead duration of sensor
then is
if
, where
is the residual lifetime of sensor
at time
; otherwise, (
),
.
Given a heterogeneous sensor network
, a charging vehicle, and a set
V of to-be-charged sensors at some time
, the dead duration minimization problem is to find a charging tour
C of the vehicle for charging sensors in
V, and allocate the routing
for each link
in period
, such that the longest dead duration of sensors in
V is minimized, i.e.,
subject to the following constraints, i.e.,
Constraint (2) shows the flow reservation of each sensor . Constraint (3) indicates that the generated data from all sensors in must be sent back to the base station. Constraints (4) and (5) calculate the energy consumption rate and the residual lifetime of each sensor at time , respectively. Constraints (6) and (7) define the dead duration and the start charging time of sensor in the tour, and .
3. Algorithm for the Dead Duration Minimization Problem
In this section, we devise a joint charging scheduling and routing allocation algorithm for the dead duration minimization problem. We first present the framework of the algorithm, which invokes two algorithms for two subproblems of the original problem. We then detail the two algorithms.
3.1. Algorithm Framework
Recall that the dead duration minimization problem is to allocate the routing for each link in period , and find a charging tour C for the charging vehicle to replenish sensors in V, such that the longest dead duration of sensors is minimized. It can be seen that the allocation of routing and the scheduling of charging tour C are tightly coupled. On one hand, the residual lifetime of each sensor is highly related to the routing , where a sensor consumes its energy quickly if it relays a large amount of data from other sensors. To minimize the longest sensor dead duration, the vehicle should charge the sensors with short residual lifetimes first. On the other hand, once the charging tour C is delivered, the start charging time that each sensor will be charged by the vehicle can be derived, by following Constraint (7). The routing should be carefully allocated, such that the dead duration of each sensor before its start charging time is minimized. In this paper, we tackle the challenging dead duration minimization problem by considering its two subproblems. In the first subproblem, assume that the routing is given, and the subproblem is to find a charging tour C, such that the longest dead duration of sensors in V is minimized, and this subproblem is referred to as the charging scheduling subproblem. In the second subproblem, we assume the charging tour C is given, and the subproblem is to allocate the routing for each link , so that we can deliver the minimum longest sensor dead duration, and this problem is referred to as the routing allocation subproblem. We will propose two algorithms for the two subproblems in two later subsections, respectively. Having the two algorithms, we devise a joint charging scheduling and routing allocation algorithm as follows.
The algorithm iteratively finds the routing and charging tour. Denote by and the routings allocated before and after the Kth iteration, respectively. Similarly, denote by and the charging tours delivered before and after the Kth iteration, respectively, where . Initially, we obtain by assuming that each sensor uploads its data along its minimum energy path to the base station. Within each iteration K, the algorithm consists of two steps. In the first step, with the given routing , it finds a charging tour , by utilizing the algorithm for the charging scheduling subproblem. In the second step, having the charging tour , it obtains a routing by invoking the algorithm for the routing allocation subproblem. If the new solution is no better than , the algorithm terminates and is the final solution to the dead duration minimization problem. Otherwise, (( is better than )), we continue to the next iteration, until the difference of the objective values of the two solutions is no greater than a small threshold with , e.g., min, or the number of the performed iterations achieves a given maximum iteration number , e.g., .
The algorithm for the dead duration minimization problem is presented in Algorithm 1.
| Algorithm 1 Joint charging scheduling and routing allocation algorithm (CSRA). |
Input: a set , a set V of to-be-charged sensors, the residual energy of each sensor in at some time , a small threshold with . Output: routing , charging tour C. - 1:
Obtain a routing by assuming that each sensor uploads its data along its minimum energy path to the base station; - 2:
for 1 to do - 3:
Find a charging tour with the routing , by invoking Algorithm 2 for the charging scheduling subproblem; - 4:
Obtain a routing with the charging tour , by invoking Algorithm 3 for the routing allocation subproblem; - 5:
Let and be the longest sensor dead durations of solutions and , respectively; - 6:
if then - 7:
; /* is no better than */ - 8:
break; - 9:
else - 10:
; /* is better than */ - 11:
end if - 12:
if then - 13:
/* the difference of the longest sensor dead durations and of solutions and is smaller than */ - 14:
break; - 15:
end if - 16:
end for - 17:
return charging tour C, and routing .
|
3.2. Algorithm for the Charging Scheduling Subproblem
Given a set
of to-be-charged sensors at some time
, and the routing
for each link
in period
. The charging scheduling subproblem is to find a charging tour
, such that the longest dead duration of sensors in
V is minimized, i.e.,
subject to constraints (2), (3), (4), (5), (6), and (7).
Assume that the charging time of each lifetime-critical off-the-shelf sensor in
is a constant
[
37], e.g.,
= 1 h, since its residual energy is very low, where
,
is the energy capacity of the sensor, and
is the off-the-shelf sensor charging rate. We further assume that the traveling time among two consecutive visited sensors can be considered as a small constant
, e.g.,
min, as the vehicle traveling time usually is much shorter than the charging time
of a lifetime-critical off-the-shelf sensor in
, e.g., 1 min vs. 1 h [
23]. Let
.
Since it takes only a very short time to fully charge ultra-fast sensors in and these sensors have heavy data relay loads, the vehicle should charge sensors in before the lifetime-critical off-the-shelf sensors in . Thus, the charging tour consists of a sub-tour for charging ultra-fast sensors in and a sub-tour for replenishing lifetime-critical off-the-shelf sensors in , i.e., . We obtain sub-tour by a brute-force search, by enumerating all charging sequences. Notice that the number of ultra-fast sensors in usually is very small, and the brute-force search then will not take a long time. On the other hand, we derive the sub-tour for lifetime-critical off-the-shelf sensors in in non-decreasing order of their residual lifetimes, i.e, , where , is the residual lifetime of sensor and .
The algorithm for the charging scheduling subproblem is presented in Algorithm 2. We later will showthat Algorithm 2 delivers an optimal solution to the charging scheduling subproblem (see
Section 4.1).
| Algorithm 2 Algorithm for the charging scheduling subproblem. |
Input: a set V of to-be-charged sensors, routing , the residual energy of each sensor . Output: charging tour . - 1:
Calculate the residual lifetime of each sensor in V; - 2:
Find a charging sub-tour of ultra-fast sensors in by a brute-force search, such that the longest dead duration of sensors in is minimized; - 3:
Sort sensors in by their residual lifetimes in non-decreasing order, i.e., , where is the residual lifetime of sensor in , and ; - 4:
Find a charging sub-tour of sensors in by charging them in the order of , , …, , i.e., ; - 5:
Let ; - 6:
return charging tour .
|
3.3. Algorithm for the Routing Allocation Subproblem
Given a sensor network
, a set
V of to-be-charged sensors, and the charging tour
of sensors in
V, the routing allocation subproblem is to find the routing
for each link
in period
, such that the longest dead duration of sensors in
V is minimized, i.e.,
subject to constraints (2), (3), (4), (7), and constraint
where
is the longest dead duration of sensors in
V,
,
and
are the start charging time, residual energy and energy consumption rate of sensor
, respectively. Notice that only flow rates
s are variables.
To obtain the optimal flow rates, we rewrite constraint (
9) as:
which is equivalent to
. Then, subproblem
is equivalent to
subject to constraints (2), (3), (4), (7), and
We note that the objective function in problem
is a linear function, and constraints (2), (3), (4), and (7) are also linear functions. However, constraint (
12) is not a linear function, where
, and
are constants, while
and
are variables.
To solve problem
, we reduce it to a series of linear programming (LP) problems. Denote by
the minimum longest dead duration of sensors in
V. The basic idea behind is to guess the optimal value
. Given a guess
of
, we consider the following LP:
subject to constraints (2), (3), (4), (7), and
Notice that constraint (13) is a linear function, as
is a given constant.
When
, we will show that there are no feasible solutions to LP
(see
Section 4.2). Otherwise (
), we will prove that there is a feasible solution to LP
. Then, we can find the minimum longest sensor dead duration
through a binary search in interval
.
The algorithm for the routing allocation subproblem is given in Algorithm 3.
| Algorithm 3 Algorithm for the routing allocation subproblem. |
Input: a set of sensors, a set V of to-be-charged sensors, the residual energy of each sensor in at some time , the charging tour . Output: routing . - 1:
Calculate the start charging time of each sensor in V by Constraint (7); - 2:
Let and ; /* and are the lower and upper bounds on the optimal value , respectively */ - 3:
while do - 4:
Let ; /* a guess of */ - 5:
if there are no feasible solutions to LP then - 6:
/* the guess is smaller than , i.e., */ - 7:
Let ; - 8:
else - 9:
/* the guess is no less than , i.e., */ - 10:
Let ; - 11:
end if - 12:
end while - 13:
Let ; - 14:
Find a feasible solution to LP with ; - 15:
return routing .
|
6. Related Work
The employment of mobile charging vehicles is a promising technique to replenish sensor energy, and the vehicle scheduling for prolonging network lifetimes has been studied in literature. Most of these studies assumed that every sensor is powered with a low-cost off-the-shelf battery [
17,
18,
19,
20,
21,
23,
38,
39,
40], e.g., Lithium battery, where the price of such a battery is about only a few dollars [
31]. It, however, usually takes some non-trivial time to fully charge such a battery, e.g., 30–80 min [
26].
Some studies employed only one charging vehicle to charge sensors in a sensor network [
17,
18,
19,
20,
23]. He et al. [
17] proposed a Nearest-Job-Next with Preemption discipline to increase the average number of charged sensors per unit time and shorten their charging latencies. Liang et al. [
20] proposed approximation algorithms to maximize the total utility of charging sensors in a charging tour, subject to the energy capacity of a charging vehicle. Lin et al. [
18] devised a temporal-spatial charging scheduling algorithm to minimize the number of dead sensors and maximize energy efficiency. Xu et al. [
23] maximized sensor lifetimes while minimizing the length of charging tour, by proposing a novel charging paradigm in which each sensor can be partially replenished. Lin et al. [
19] developed a Primary and Passer-by scheduling algorithm to increase the number of charged sensors before their energy expiration times, by charging some energy-sufficient sensors that are close to energy-critical sensors, such that their chargings will not prolong the dead durations of latter sensors.
On the other hand, some other studies [
21,
38,
39,
40] employed multiple charging vehicles to maintain sensor networks perpetually. Liang et al. [
40] devised an approximation algorithm to minimize the number of dispatched vehicles to charge energy-critical sensors, subject to the energy capacity of each vehicle. Jiang et al. [
39] considered not only the charging sequence but also the vehicle depot positioning, such that the number of deployed charging vehicles is minimized and the ratio of the sensor charging time to traveling time is maximized. Dai et al. [
38] scheduled multiple charging vehicles to replenish sensor energy with an objective of maximizing the total amount of energy charged into sensors, and further minimizing the overall charging time under the electromagnetic radiation safety constraint. Wang et al. [
21] proposed a hybrid network framework that consists of solar-powered sensors and wireless-powered sensors. They studied the problem of minimizing vehicle traveling energy, such that the perpetual operations of sensors are maintained.
It can be seen that, although excellent studies have been conducted for replenishing sensor energy and shortening their dead durations, some sensors may still expire their energy, as the charging time of a sensor is non-trivial, e.g., 30–80 min [
26].
We note that other researchers [
12,
27,
28,
29,
30] assumed that every sensor is powered with an ultra-fast charging battery, and it only takes a trivial time to fully charge such a battery, e.g., within 1 min [
27,
28]. Therefore, they usually ignored the sensor charging time. For example, Zhao et al. [
28] assumed that a vehicle is able to not only charge sensors but also collect sensing data. In each charging round, they first found the charging tour of lifetime-critical sensors and then allocated routing in the period that the vehicle performs sensor charging, such that the utility of collected sensing data is maximized. Zhang et al. [
29] adopted a collaborative charging paradigm, in which any two charging vehicles can transfer energy with each other. They investigated the problem of employing multiple vehicles to charge sensors, such that the ratio of the energy consumed for charging sensors to the energy consumption on vehicle traveling is maximized. Xu et al. [
27] studied the problem of scheduling multiple charging vehicles to charge sensors in a given monitoring period such that none of these sensors depletes its energy and the total traveling cost of the vehicles is minimized, where the energy consumption rates of different sensors vary significantly.
Different from these mentioned existing studies, in this paper, we propose a novel heterogeneous network model by deploying a few ultra-fast sensors at some strategic locations near the base station. The network cost is low, since we deploy only a few expensive ultra-fast sensors. On the other hand, we show that the network performance can be significantly improved with even such a small number of ultra-fast sensors, by enabling ultra-fast sensors to relay more data for other lifetime-critical sensors.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







