A Two-Dimensional Wireless and Passive Sensor for Stress Monitoring


Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials and Principle
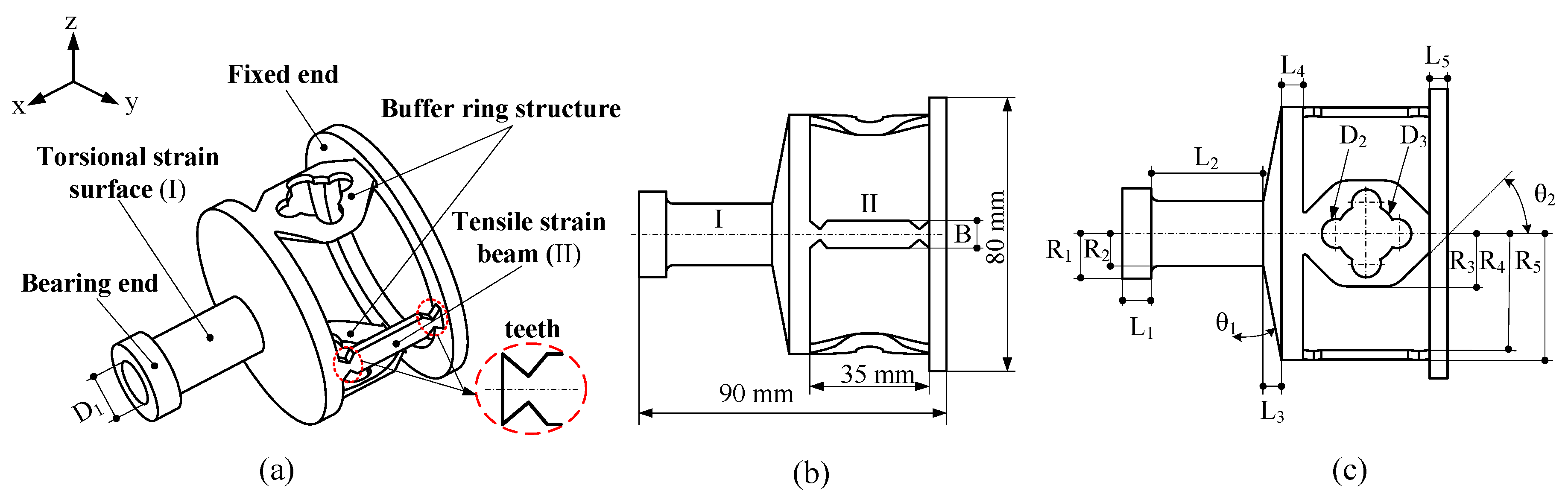
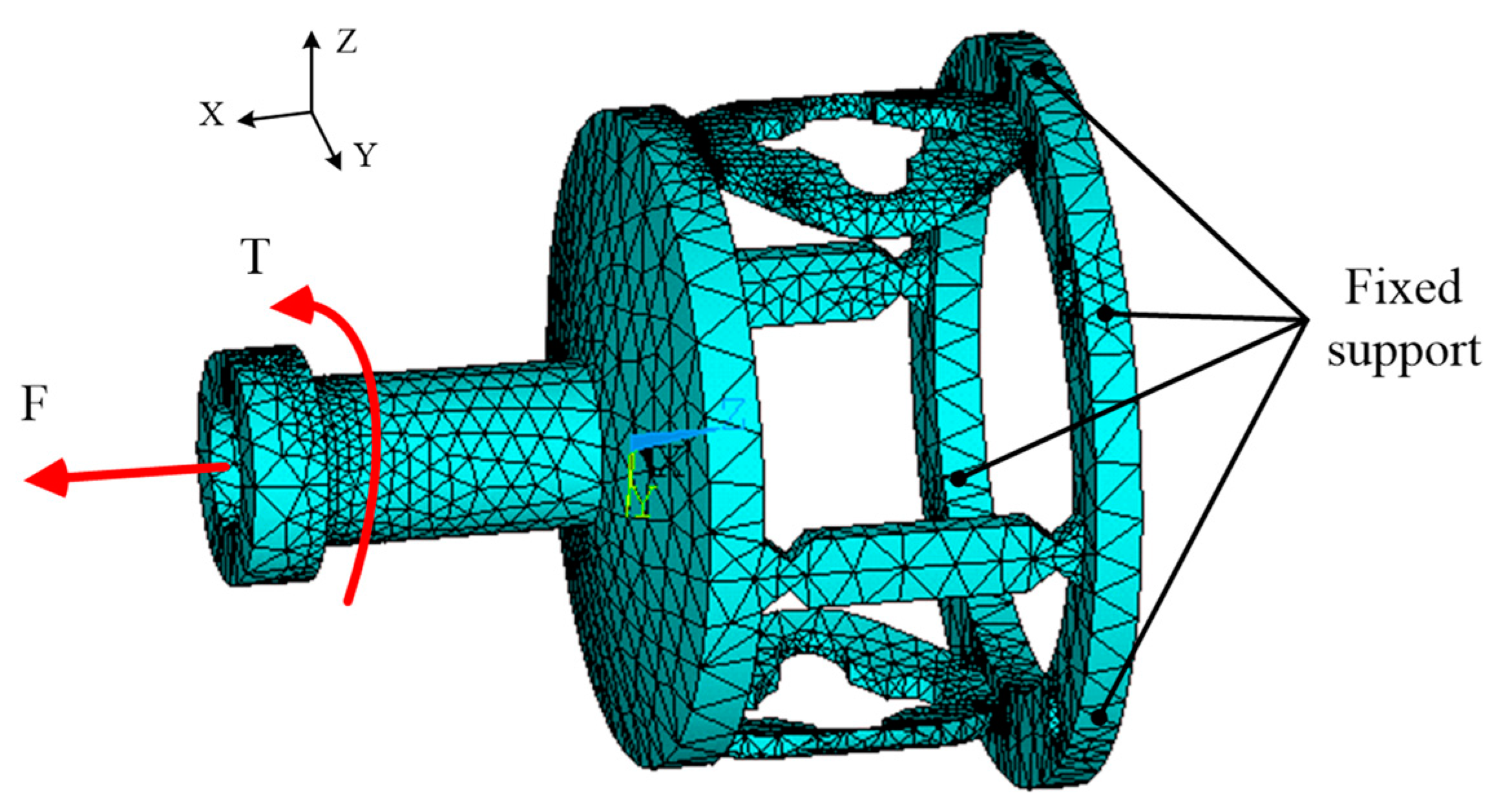
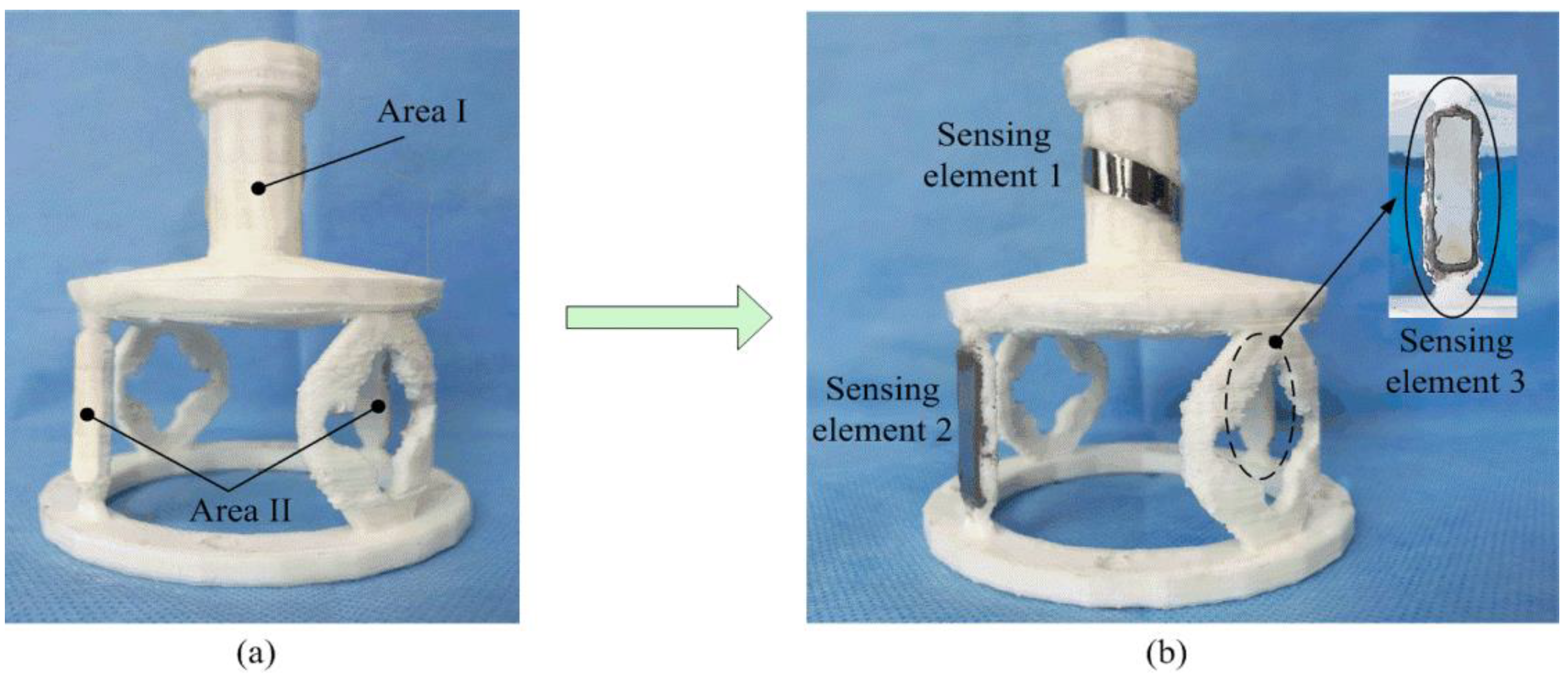
2.2. Sensor Design, Analysis, and Fabrication
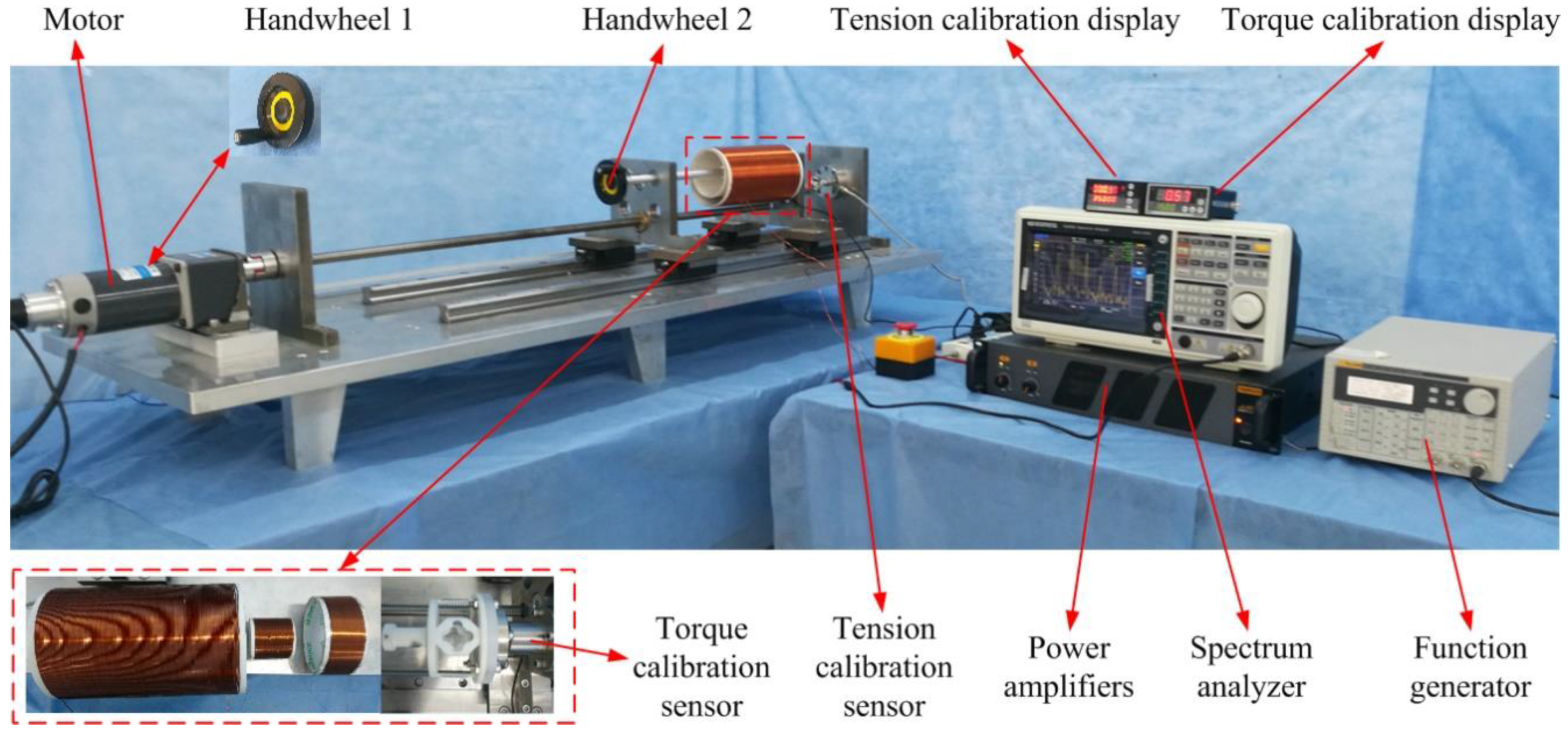
2.3. Sensor Output Performance Experiments
3. Results and Discussion
3.1. Experimental Results of the Sensor Prototype
3.2. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gattiker, F.; Umbrecht, F.M.; Muller, D.; Neuenschwander, J. Novel ultrasound read-out for a wireless implantable passive strain sensor (WIPSS). Sens. Actuators A 2008, 145–146, 291–298. [Google Scholar] [CrossRef]
- Deivasigamani, A.; Daliri, A.; Wang, C.H.; John, S. A review of passive wireless sensors for structural health monitoring. Mod. Appl. Sci. 2013, 7, 57. [Google Scholar] [CrossRef]
- Ausanio, G.; Barone, A.C.; Hison, C.; Iannotti, V.; Mannara, G.; Lanotte, L. Magnetoelastic sensor application in civil buildings monitoring. Sens. Actuators A 2005, 123/124, 290–295. [Google Scholar] [CrossRef]
- Ansari, F. Fiber optic health monitoring of civil structures using long gage and acoustic sensors. Smart Mater. Struct. 2005, 14, S1–S7. [Google Scholar] [CrossRef]
- Farhey, D.N. Long-term performance monitoring of the Tech 21 all-composite bridge. J. Compos. Construct. 2005, 9, 55–62. [Google Scholar] [CrossRef]
- Omenzetter, P.; Brownjohn, J.M.W. Application of time series analysis for bridge monitoring. Smart Mater. Struct. 2006, 15, 129–138. [Google Scholar] [CrossRef]
- Umbrecht, F.; Wendlandt, M.; Juncker, D.; Hierold, C.; Neuenschwander, J. A wireless implantable passive strain sensor system. Proc. IEEE Sens. 2005, 2005, 20–23. [Google Scholar] [CrossRef]
- Klinger, T.; Pfützner, H.; Schönhuber, P.; Hoffmann, K.; Bachl, N. Magnetostrictive amorphous sensor for biomedical monitoring. IEEE Trans. Magn. 1992, 28, 2400–2402. [Google Scholar] [CrossRef]
- Watson, P.C.; Drake, S.H. Pedestal and wrist force sensors for automatic assembly. In Proceedings of the 5th International Symposium on Industrial Robots, Chicago, IL, USA, 22–24 September 1975; pp. 501–511. [Google Scholar]
- Giovinazzo, G.; Varrone, P. Transducer with Six Degrees of Freedom. U.S. Patent 4320392 A, 16 March 1982. [Google Scholar]
- Tan, E.L.; Pereles, B.D.; Shao, R.; Ong, J.; Ong, K.G. A wireless, passive strain sensor based on the harmonic response of magnetically soft materials. Smart Mater. Struct. 2008, 17, 025015. [Google Scholar] [CrossRef]
- Tan, E.L.; Pereles, B.D.; Horton, B.; Shao, R.; Zourob, M.; Ong, K.G. Implantable biosensors for real-time strain and pressure monitoring. Sensors 2008, 8, 6396–6406. [Google Scholar] [CrossRef]
- Kaniusas, E.; Pfutzner, H.; Mehnen, L.; Kosel, J. Magnetoelastic skin curvature sensor for biomedical applications. In Proceedings of the IEEE Sensors, Vienna, Austria, 24–27 October 2004; pp. 1484–1487. [Google Scholar] [CrossRef]
- Eli, V.; Janka, L.P.; Keat Ghee, O.; Rajachar, R.M. Magnetoelastic materials as novel bioactive coatings for the control of cell adhesion. IEEE Trans. Bio-Med. Eng. 2011, 58, 698–704. [Google Scholar] [CrossRef]
- Holmes, H.R.; Tan, E.L.; Ong, K.G.; Rajachar, R.M. Fabrication of biocompatible, vibrational magnetoelastic materials for controlling cellular adhesion. Biosensors 2012, 2, 57–69. [Google Scholar] [CrossRef] [PubMed]
- Zeng, K.; Grimes, C.A. Wireless magnetoelastic physical, chemical, and biological sensors. IEEE Trans. Magn. 2007, 43, 2358–2363. [Google Scholar] [CrossRef]
- Wun-Fogle, M.; Savage, H.T.; Clark, A.E. Sensitive, wide frequency range magnetostrictive strain gage. Sens. Actuators 1987, 12, 323–331. [Google Scholar] [CrossRef]
- Lanotte, L. Tensile stress effect on magnetic properties of cw-laser annealed amorphous Fe40Ni40P14B6 ribbons. J. Phys. Lett. 1983, 44, L541–L546. [Google Scholar] [CrossRef]
- Grimes, C.A.; Mungle, C.S.; Zeng, K.; Jain, M.K.; Dreschel, W.R.; Paulose, M.; Ong, K.G. Wireless Magnetoelastic Resonance Sensors: A Critical Review. Sensors 2002, 2, 294–313. [Google Scholar] [CrossRef] [Green Version]
- Hernando, A.; Vazquez, M.; Barandiaran, J.M. Metallic glasses and sensing applications. J. Phys. E Sci. Instrum. 1988, 21, 1129–1139. [Google Scholar] [CrossRef]
- Rezwan, K.; Chen, Q.J.; Boccaccini, A.R. Biodegradable and bioactive porous polymer/inorganic composite scaffolds for bone tissue engineering. Biomaterials 2006, 27, 3413–3431. [Google Scholar] [CrossRef]
- Persson, M.; Lorite, G.S.; Kokkonen, H.E. Effect of bioactive extruded PLA/HA composite films on focal adhesion formation of preosteoblastic cells. Colloid Surface B 2014, 121, 409–416. [Google Scholar] [CrossRef]
- Athanasiou, K.A.; Niederauer, G.G.; Agrawal, C.M. Sterilization, toxicity, biocompatibility and clinical applications of polylactic acid/polyglycolic acid copolymers. Biomaterials 1996, 17, 93–102. [Google Scholar] [CrossRef]
- Tan, Y.; Hu, J.; Ren, L.; Zhu, J.; Yang, J.; Liu, D. A passive and wireless sensor for bone plate strain monitoring. Sensors 2017, 17, 2635. [Google Scholar] [CrossRef]
- Alfaro, F.; Weiss, L.; Campbell, P.; Miller, M.; Fedder, G.K. Design of a multi-axis implantable MEMS sensor for intraosseous bone stress monitoring. J. Micromech. Microeng. 2009, 19. [Google Scholar] [CrossRef]
- Umbrecht, F.; Wägli, P.; Dechand, S.; Gattiker, F.; Neuenschwander, J.; Sennhauser, U.; Hierold, C. Wireless implantable passive strain sensor: Design, fabrication and characterization. J. Micromech. Microeng. 2010, 20. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure Dimensions | Values | Structure Dimensions | Values |
|---|---|---|---|
| D1 | 14 mm | B | 8 mm |
| D2 | 8 mm | R1 | 12.5 mm |
| D3 | 16 mm | R2 | 9 mm |
| L1 | 8 mm | R3 | 20 mm |
| L2 | 30 mm | R4 | 32.5 mm |
| L3 | 5 mm | R5 | 35 mm |
| L4 | 6 mm | θ1 | 20° |
| L5 | 5 mm | θ2 | 45° |
| FEM Model | Elements/Nodes | Material Properties | ||
|---|---|---|---|---|
| Young′s Modulus | Tensile Strength | Poisson’s Ratio | ||
| Elastomer | 3060/6343 | 1.7–3 (GPa) | ≥60 (MPa) | 0.36 |
| Coil | Material | Diameter | Turns | Copper Diameter | Number of Layers |
|---|---|---|---|---|---|
| Exciting coil | Copper wire | 110 mm | 200 | 0.5 mm | Single |
| Sensing coil A | Single | 40 mm | 160 | 0.25 mm | Double |
| Sensing coil B | Single | 80 mm | 160 | 0.25 mm | Double |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, Y.; Zhu, J.; Ren, L. A Two-Dimensional Wireless and Passive Sensor for Stress Monitoring. Sensors 2019, 19, 135. https://doi.org/10.3390/s19010135
Tan Y, Zhu J, Ren L. A Two-Dimensional Wireless and Passive Sensor for Stress Monitoring. Sensors. 2019; 19(1):135. https://doi.org/10.3390/s19010135
Chicago/Turabian StyleTan, Yisong, Jianhua Zhu, and Limin Ren. 2019. "A Two-Dimensional Wireless and Passive Sensor for Stress Monitoring" Sensors 19, no. 1: 135. https://doi.org/10.3390/s19010135
APA StyleTan, Y., Zhu, J., & Ren, L. (2019). A Two-Dimensional Wireless and Passive Sensor for Stress Monitoring. Sensors, 19(1), 135. https://doi.org/10.3390/s19010135