A Soft-Threshold Filtering Approach for Tomography Reconstruction from a Limited Number of Projections with Bilateral Edge Preservation


Abstract
:1. Introduction
1.1. Classical, Iterative, and Statistical CT Image Reconstruction Approaches
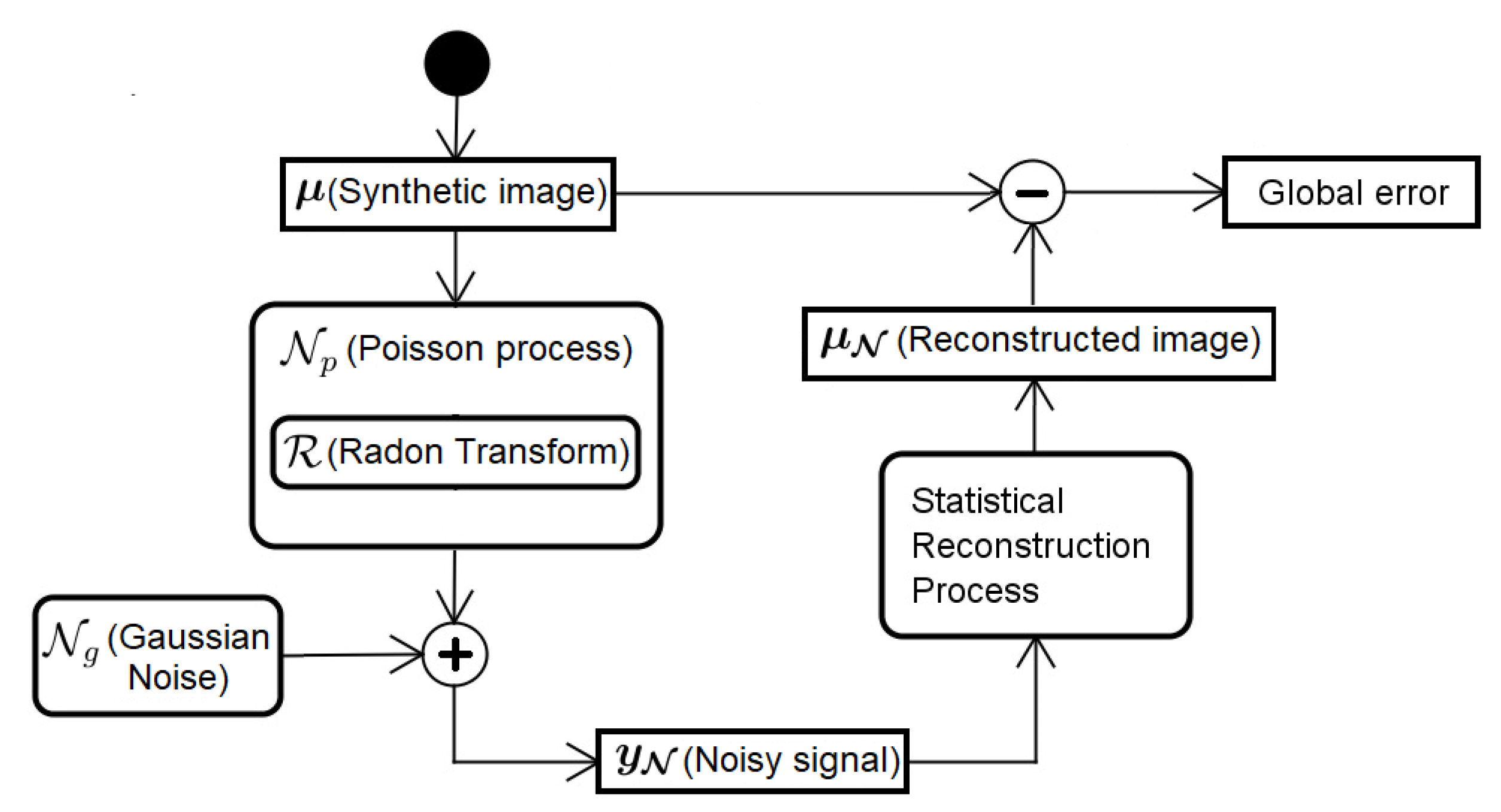
1.2. Signal Modeling and Error Considerations in CT Image Reconstruction
1.3. The Contribution of This Work
2. Modeling the Objective Function
2.1. Objective Function Modeling Using Soft-threshold Filtering for CT Image Reconstruction
2.2. Objective Function Modeling by Using Bilateral Edge Preservation for CT Image Reconstruction
3. Objective Function Optimization
3.1. First Stage: Minimization of the Fidelity Term with SART
3.2. Second Stage: Bilateral Edge-Preserving with a Gradient Descent Method
3.3. Third Stage: TV Minimization by Soft-threshold Filtering
3.4. Convergence and Convexity Considerations
4. Experiments and Results
Low Dosage Tests and Results
5. Conclusions and Final Comments
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| ALARA | As-low-as-reasonably-achievable |
| AMP | Approximate message passing |
| ART | Algebraic reconstruction technique |
| BEP | Bilateral edge preserving |
| CT | Computer tomography |
| DCT-GAMP | Denoising CT generalized Approximate message passing |
| DGT | Discrete gradient transform |
| FBP | Filtered backprojection |
| FFT | Fast Fourier transform |
| MAP | Maximum a posteriori |
| MMSE | Minimum mean square error |
| OS-SART | Ordered subset simultaneous algebraic reconstruction technique |
| PSNR | Peak signal-to-noise ratio |
| TV | Total variation |
| SART | Simultaneous algebraic reconstruction technique |
| SSIM] | Structural similarity |
| VW-SART | Variable weighted simultaneous algebraic reconstruction technique |
Appendix A
References
- Brody, A.S.; Frush, D.P.; Huda, W.; Brent, R.L. Radiation Risk to Children From Computed Tomography. Am. Acad. Pediatrics 2007, 120, 677–682. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shepp, L.A.; Logan, B.F. The Fourier reconstruction of a head section. IEEE Trans. Nucl. Sci. 1973, NS-21, 21–43. [Google Scholar] [CrossRef]
- Horn, B.K.P. Fan-beam reconstruction methods. Proc. IEEE 1979, 67, 1616–1623. [Google Scholar] [CrossRef]
- Hsieh, J. Computed Tomography—Principles, Design, Artifacts and Recent Advances. In Computed Tomography—Principles, Design, Artifacts and Recent Advances, 2nd ed.; Wiley Inter-science: Bellingham, WA, USA, 2009; Chapter 2; pp. 29–30. [Google Scholar]
- Hsieh, J. Computed Tomography—Principles, Design, Artifacts and Recent Advances, 2nd ed.; Wiley Inter-science: Bellingham, WA, USA, 2009; Chapter 3; pp. 102–112. [Google Scholar]
- Lange, K.; Bahn, M.; Little, R. A Theoretical Study of Some Maximum Likelihood Algorithms for Emission and Transmission Tomography. IEEE Trans. Med. Imaging 1987, 6, 106–114. [Google Scholar] [CrossRef]
- Snyder, D.L.; Helstrom, C.W.; Lanterman, A.D.; Faisal, M.; White, R.L. Compensation for readout noise in CCD images. J. Opt. Soc. Am. 1995, 12, 272–283. [Google Scholar] [CrossRef]
- Whiting, B.R. Signal statistics in x-ray computed tomography. Proc. SPIE 2002, 4682, 53–60. [Google Scholar]
- Yu, H.; Wang, G. Sart-Type Half-Threshold Filtering Approach for CT Reconstruction. Access IEEE 2014, 2, 602–613. [Google Scholar]
- Carson, R.E.; Lange, K. E-M Reconstruction Algorithms for Emission and Transmission Tomography. J. Comput. Assist. Tomogr. 1984, 8, 306–316. [Google Scholar]
- Man, B.D.; Nuyts, J.; Dupont, P.; Marchal, G.; Suetens, P. Reduction of metal streak artifacts in X-ray computed tomography using a transmission maximum a posteriori algorithm. IEEE Trans. Nucl. Sci. 2000, 47, 977–981. [Google Scholar] [CrossRef] [Green Version]
- Man, B.D.; Nuyts, J.; Dupont, P.; Marchal, G.; Suetens, P. An iterative maximum-likelihood polychromatic algorithm for CT. IEEE Trans. Med. Imaging 2001, 20, 999–1008. [Google Scholar] [CrossRef] [PubMed]
- Elbakri, I.A.; Fessler, J.A. Statistical Image Reconstruction for Polyenergetic X-Ray Computed Tomography. IEEE Trans. Med. Imaging 2002, 21, 89–99. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Wang, G. Compressed sensing based interior tomography. Phys. Med. Biol. 2009, 54, 2791–2805. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Wang, G. A soft-threshold filtering approach for reconstruction from a limited number of projections. Phys. Med. Biol. 2010, 1, 3905–3916. [Google Scholar] [CrossRef]
- Xu, Q.; Mou, X.; Wang, G.; Sieren, J.; Hoffman, E.A.; Yu, H. Statistical Interior Tomography. IEEE Trans. Med. Imaging 2011, 30, 1116–1128. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Deák, Z.; Grimm, J.M.; Treitl, M.; Geyer, L.L.; Linsenmaier, U.; Körner, M.; Reiser, M.F.; Wirth, S. Filtered Back Projection, Adaptive Statistical Iterative Reconstruction, and a Model-based Iterative Reconstruction in Abdominal CT: An Experimental Clinical Study. Radiology 2013, 266, 197–206. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choudhary, C.; Malik, R.; Choi, A.; Weigold, W.G.; Weissman, G. Effect of Adaptive Statistical Iterative Reconstruction on Coronary Artery Calcium Scoring. J. Am. Coll. Cardiol. 2014, 63, A1157. [Google Scholar] [CrossRef]
- Aday, A.W.; MacRae, C.A. Genomic Medicine in Cardiovascular Fellowship Training. Circulation 2017, 136, 345–346. [Google Scholar] [CrossRef]
- Zhu, Z.; Pang, S. Few-photon computed x-ray imaging. Appl. Phys. Lett. 2018, 113, 231109. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.H.; Choo, K.S.; Moon, T.Y.; Lee, J.W.; Jeon, U.B.; Kim, T.U.; Hwang, J.Y.; Yun, M.J.; Jeong, D.W.; Lim, S.J. Comparison of the image qualities of filtered back-projection, adaptive statistical iterative reconstruction, and model-based iterative reconstruction for CT venography at 80 kVp. Eur. Radiol. 2016, 26, 2055–2063. [Google Scholar] [CrossRef]
- Zhang, G.; Tzoumas, S.; Cheng, K.; Liu, F.; Liu, J.; Luo, J.; Bai, J.; Xing, L. Generalized Adaptive Gaussian Markov Random Field for X-Ray Luminescence Computed Tomography. IEEE Trans. Biomed. Eng. 2018, 65, 2130–2133. [Google Scholar] [CrossRef]
- Clark, D.P.; Lee, C.L.; Kirsch, D.G.; Badea, C.T. Spectrotemporal CT data acquisition and reconstruction at low dose. Med. Phys. 2015, 42, 6317–6336. [Google Scholar] [CrossRef] [Green Version]
- Charbonnier, P.; Blanc-Feraud, L.; Aubert, G.; Barlaud, M. Deterministic edge-preserving regularization in computed imaging. IEEE Trans. Image Process. 1997, 6, 298–311. [Google Scholar] [CrossRef] [PubMed]
- Sreehari, S.; Venkatakrishnan, S.V.; Wohlberg, B.; Buzzard, G.T.; Drummy, L.F.; Simmons, J.P.; Bouman, C.A. Plug-and-Play Priors for Bright Field Electron Tomography and Sparse Interpolation. IEEE Trans. Comput. Imag. 2016, 2, 408–423. [Google Scholar] [CrossRef]
- Perelli, A.; Lexa, M.A.; Can, A.; Davies, M.E. Denoising Message Passing for X-ray Computed Tomography Reconstruction. arXiv 2016, arXiv:1609.04661. [Google Scholar]
- Sun, Y.; Chen, H.; Tao, J.; Lei, L. Computed tomography image reconstruction from few views via Log-norm total variation minimization. Digital Signal Process. 2019, 88, 172–181. [Google Scholar] [CrossRef]
- Gu, P.; Jiang, C.; Ji, M.; Zhang, Q.; Ge, Y.; Liang, D.; Liu, X.; Yang, Y.; Zheng, H.; Hu, Z. Low-Dose Computed Tomography Image Super-Resolution Reconstruction via Random Forests. Sensors 2019, 19, 207. [Google Scholar] [CrossRef] [PubMed]
- Yu, Z.; Noo, F.; Dennerlein, F.; Wunderlich, A.; Lauritsch, G.; Hornegger, J. Simulation tools for two-dimensional experiments in x-ray computed tomography using the FORBILD head phantom. Phys. Med. Biol. 2012, 57, N237. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, L. Mixed impulse and Gaussian noise removal using detail-preserving regularization. Opt. Eng. 2010, 49, 097002. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, L. A robust multiframe super-resolution algorithm based on half-quadratic estimation with modified BTV regularization. Digital Signal Process. 2013, 1, 98–109. [Google Scholar] [CrossRef]
- Ge, W.; Ming, J. Ordered-subset simultaneous algebraic reconstruction techniques (OS-SART). J. X-Ray Sci. Technol. 2004, 12, 169–177. [Google Scholar]
- Pan, J.; Zhou, T.; Han, Y.; Jiang, M. Variable Weighted Ordered Subset Image Reconstruction Algorithm. Int. J. Biomed. Imaging 2006, 2006, 10398. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Wang, G. SART-Type Image Reconstruction from a Limited Number of Projections with the Sparsity Constraint. Int. J. Biomed. Imaging 2010, 2010, 3. [Google Scholar] [CrossRef] [PubMed]
- Gu, R.; Dogandzc, A. Polychromatic X-ray CT Image Reconstruction and Mass-Attenuation Spectrum Estimation. IEEE Trans. Comput. Imag. 2016, 2, 150–165. [Google Scholar] [CrossRef]
- Achterhold, K.; Bech, M.; Schleede, S.; Potdevin, G.; Ruth, R.; Loewen, R.; Pfeifferb, F. Monochromatic computed tomography with a compact laser-driven X-ray source. Sci. Rep. 2013, 13, 150–165. [Google Scholar] [CrossRef] [PubMed]
- Daubechies, I.; Defrise, M.; Mol, C.D. An iterative thresholding algorithm for linear inverse problems with a sparsity constraint. Commun. Pure Appl. Math. 2004, 57, 1413–1457. [Google Scholar] [CrossRef] [Green Version]
- Farsiu, S.; Dirk, M.; Elad, M.; Milanfar, P. Fast and robust multiframe super resolution. IEEE Trans. Image Process. 2004, 13, 1327–1344. [Google Scholar] [CrossRef] [PubMed]
- Rabie, T. Robust estimation approach for blind denoising. IEEE Trans. Image Process. 2005, 14, 1755–1765. [Google Scholar] [CrossRef]
- Hansen, P.C.; Saxild-Hansen, M. AIR Tools—A MATLAB Package of Algebraic Iterative Reconstruction Methods. J. Comput. Appl. Math. 2012, 236, 2167–2178. [Google Scholar] [CrossRef]
- Ritschl, L.; Bergner, F.; Fleischmann, C.; Kachelrieß, M. Improved total variation-based CT image reconstruction applied to clinical data. Phys. Med. Biol. 2011, 56, 1545–1561. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PSNR Metric | SSIM Metric | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Image | Noise (dB) | Method | 30 projections | 15 Projections | 30 Projections | 15 Projections | ||||||||
| k = 350 | 700 | 1000 | k = 350 | 700 | 1000 | k = 350 | 700 | 1000 | k = 350 | 700 | 1000 | |||
| A | 75.9859 | 75.8311 | 75.5142 | 74.4987 | 74.502 | 73.8998 | 0.8522 | 0.8568 | 0.8548 | 0.8424 | 0.8506 | 0.8480 | ||
| 32 | B | 76.1405 | 76.2478 | 76.2701 | 74.4034 | 74.5392 | 74.587 | 0.8389 | 0.8452 | 0.8470 | 0.8277 | 0.8368 | 0.8403 | |
| C | 67.9001 | 67.9001 | 67.9001 | 66.0238 | 66.0238 | 66.0238 | 0.1281 | 0.1281 | 0.1281 | 0.0905 | 0.0905 | 0.0905 | ||
| A | 79.7397 | 79.7947 | 79.1235 | 76.7531 | 77.7001 | 76.634 | 0.9589 | 0.9625 | 0.9572 | 0.9278 | 0.9418 | 0.9318 | ||
| FA | 46 | B | 79.5257 | 80.759 | 81.2113 | 76.2466 | 77.2650 | 77.8593 | 0.9506 | 0.9630 | 0.9662 | 0.9147 | 0.9334 | 0.9412 |
| C | 68.1199 | 68.1199 | 68.1199 | 66.0941 | 66.0941 | 66.0941 | 0.1418 | 0.1418 | 0.1418 | 0.0942 | 0.0942 | 0.0942 | ||
| A | 80.0246 | 80.0840 | 79.3894 | 76.9335 | 77.951 | 76.7656 | 0.9634 | 0.9665 | 0.9615 | 0.9328 | 0.9468 | 0.9356 | ||
| 60 | B | 79.7982 | 81.2432 | 81.8295 | 76.3869 | 77.5277 | 78.2139 | 0.9564 | 0.9692 | 0.9727 | 0.9194 | 0.9390 | 0.9473 | |
| C | 68.1290 | 68.1290 | 68.1290 | 66.0973 | 66.0973 | 66.0973 | 0.1424 | 0.1424 | 0.1424 | 0.0947 | 0.0947 | 0.0947 | ||
| A | 68.8491 | 68.7420 | 68.5457 | 67.4093 | 67.0085 | 66.2663 | 0.753 | 0.7624 | 0.7607 | 0.7292 | 0.7313 | 0.7203 | ||
| 32 | B | 68.8981 | 69.0161 | 69.043 | 67.3406 | 67.4181 | 67.4202 | 0.7236 | 0.7340 | 0.7368 | 0.6998 | 0.7112 | 0.7143 | |
| C | 62.6576 | 62.6576 | 62.6576 | 61.3241 | 61.3241 | 61.3241 | 0.1096 | 0.1096 | 0.1096 | 0.1013 | 0.1013 | 0.1013 | ||
| A | 70.5681 | 70.7268 | 70.5159 | 68.3913 | 68.4761 | 68.1521 | 0.8852 | 0.9028 | 0.898 | 0.8288 | 0.8394 | 0.8361 | ||
| FH | 46 | B | 70.3511 | 70.9038 | 71.0856 | 68.0724 | 68.4681 | 68.6376 | 0.8605 | 0.8815 | 0.8876 | 0.7985 | 0.8216 | 0.8292 |
| C | 62.8480 | 62.8480 | 62.8480 | 61.3975 | 61.3975 | 61.3975 | 0.1327 | 0.1327 | 0.1327 | 0.1130 | 0.1130 | 0.1130 | ||
| A | 70.6733 | 70.8539 | 70.6321 | 68.4433 | 68.5563 | 68.2407 | 0.8919 | 0.9100 | 0.9049 | 0.8337 | 0.8450 | 0.8420 | ||
| 60 | B | 70.4422 | 71.0466 | 71.2518 | 68.1110 | 68.5327 | 68.7161 | 0.8679 | 0.8899 | 0.8964 | 0.8033 | 0.8274 | 0.8356 | |
| C | 62.8551 | 62.8551 | 62.8551 | 61.4002 | 61.4002 | 61.4002 | 0.1342 | 0.1342 | 0.1342 | 0.1136 | 0.1136 | 0.1136 | ||
| A | 74.0945 | 74.0583 | 73.8128 | 71.9549 | 72.1447 | 71.5547 | 0.9325 | 0.9358 | 0.9350 | 0.8938 | 0.9066 | 0.8989 | ||
| 32 | B | 73.5586 | 74.3921 | 74.6588 | 70.7452 | 71.812 | 72.2027 | 0.9036 | 0.9151 | 0.9174 | 0.8433 | 0.8740 | 0.8831 | |
| C | 64.5268 | 64.5268 | 64.5268 | 63.4489 | 63.4489 | 63.4489 | 0.1800 | 0.1800 | 0.1800 | 0.1604 | 0.1604 | 0.1604 | ||
| A | 74.6383 | 74.6475 | 74.3422 | 72.2586 | 72.5832 | 72.0034 | 0.9542 | 0.9579 | 0.9572 | 0.9093 | 0.9251 | 0.9186 | ||
| SL | 46 | B | 73.9486 | 75.1170 | 75.5809 | 70.8990 | 72.1570 | 72.6781 | 0.9298 | 0.9444 | 0.9477 | 0.8575 | 0.8917 | 0.9026 |
| C | 64.5592 | 64.5592 | 64.5592 | 63.4619 | 63.4619 | 63.4619 | 0.1940 | 0.1940 | 0.1940 | 0.1661 | 0.1661 | 0.1661 | ||
| A | 74.6588 | 74.6647 | 74.3552 | 72.2741 | 72.6033 | 72.0213 | 0.955 | 0.9587 | 0.9581 | 0.9099 | 0.9257 | 0.9193 | ||
| 60 | B | 73.9636 | 75.1504 | 75.6263 | 70.9047 | 72.1699 | 72.6975 | 0.9309 | 0.9458 | 0.9491 | 0.8580 | 0.8925 | 0.9036 | |
| C | 64.5606 | 64.5606 | 64.5606 | 63.4625 | 63.4625 | 63.4625 | 0.1946 | 0.1946 | 0.1946 | 0.1663 | 0.1663 | 0.1663 | ||
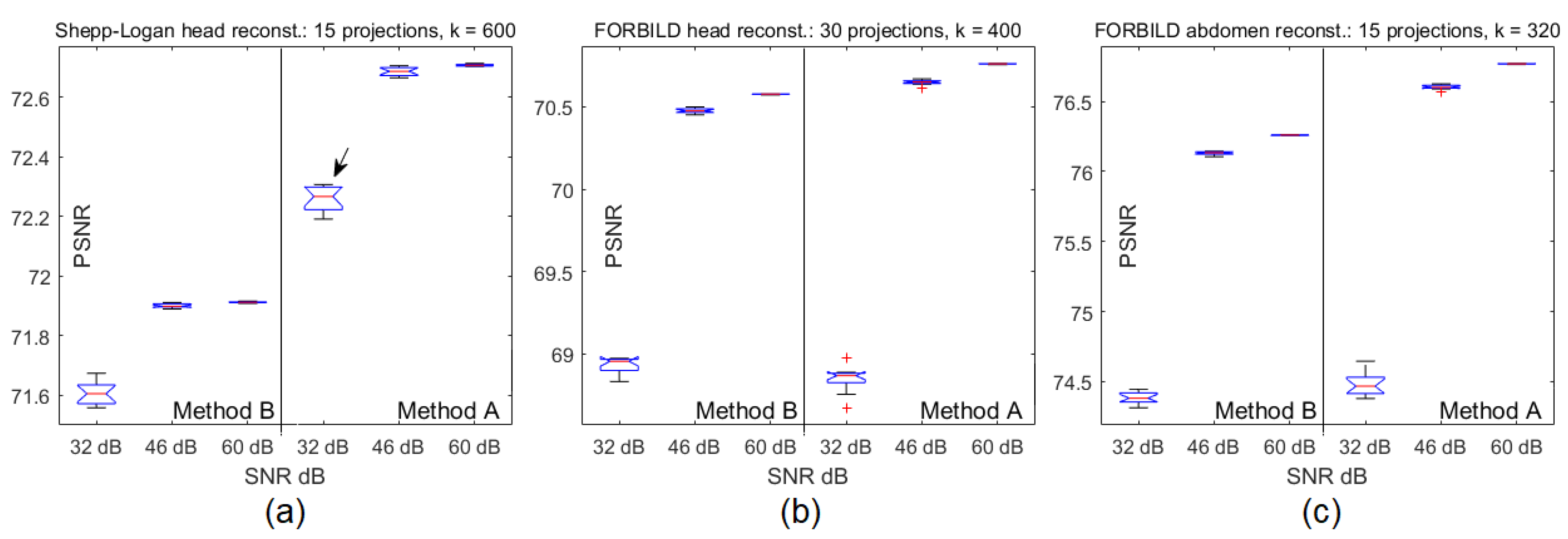
| Image | Method | SNR dB | Mean | Median | Max | Min | Standard Deviation |
|---|---|---|---|---|---|---|---|
| 32 | 71.60589 | 71.60400 | 71.67289 | 71.55672 | 0.03613 | ||
| B | 46 | 71.90013 | 71.89770 | 71.91010 | 71.88857 | 0.00725 | |
| SL | 60 | 71.91110 | 71.91103 | 71.91474 | 71.90779 | 0.00199 | |
| 32 | 72.25797 | 72.26654 | 72.30637 | 72.19037 | 0.04360 | ||
| A | 46 | 72.68626 | 72.68664 | 72.70573 | 72.66494 | 0.01435 | |
| 60 | 72.70719 | 72.70709 | 72.71359 | 72.70282 | 0.00356 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wirtti, T.T.; Salles, E.O.T. A Soft-Threshold Filtering Approach for Tomography Reconstruction from a Limited Number of Projections with Bilateral Edge Preservation. Sensors 2019, 19, 2346. https://doi.org/10.3390/s19102346
Wirtti TT, Salles EOT. A Soft-Threshold Filtering Approach for Tomography Reconstruction from a Limited Number of Projections with Bilateral Edge Preservation. Sensors. 2019; 19(10):2346. https://doi.org/10.3390/s19102346
Chicago/Turabian StyleWirtti, Tiago T., and Evandro O. T. Salles. 2019. "A Soft-Threshold Filtering Approach for Tomography Reconstruction from a Limited Number of Projections with Bilateral Edge Preservation" Sensors 19, no. 10: 2346. https://doi.org/10.3390/s19102346
APA StyleWirtti, T. T., & Salles, E. O. T. (2019). A Soft-Threshold Filtering Approach for Tomography Reconstruction from a Limited Number of Projections with Bilateral Edge Preservation. Sensors, 19(10), 2346. https://doi.org/10.3390/s19102346