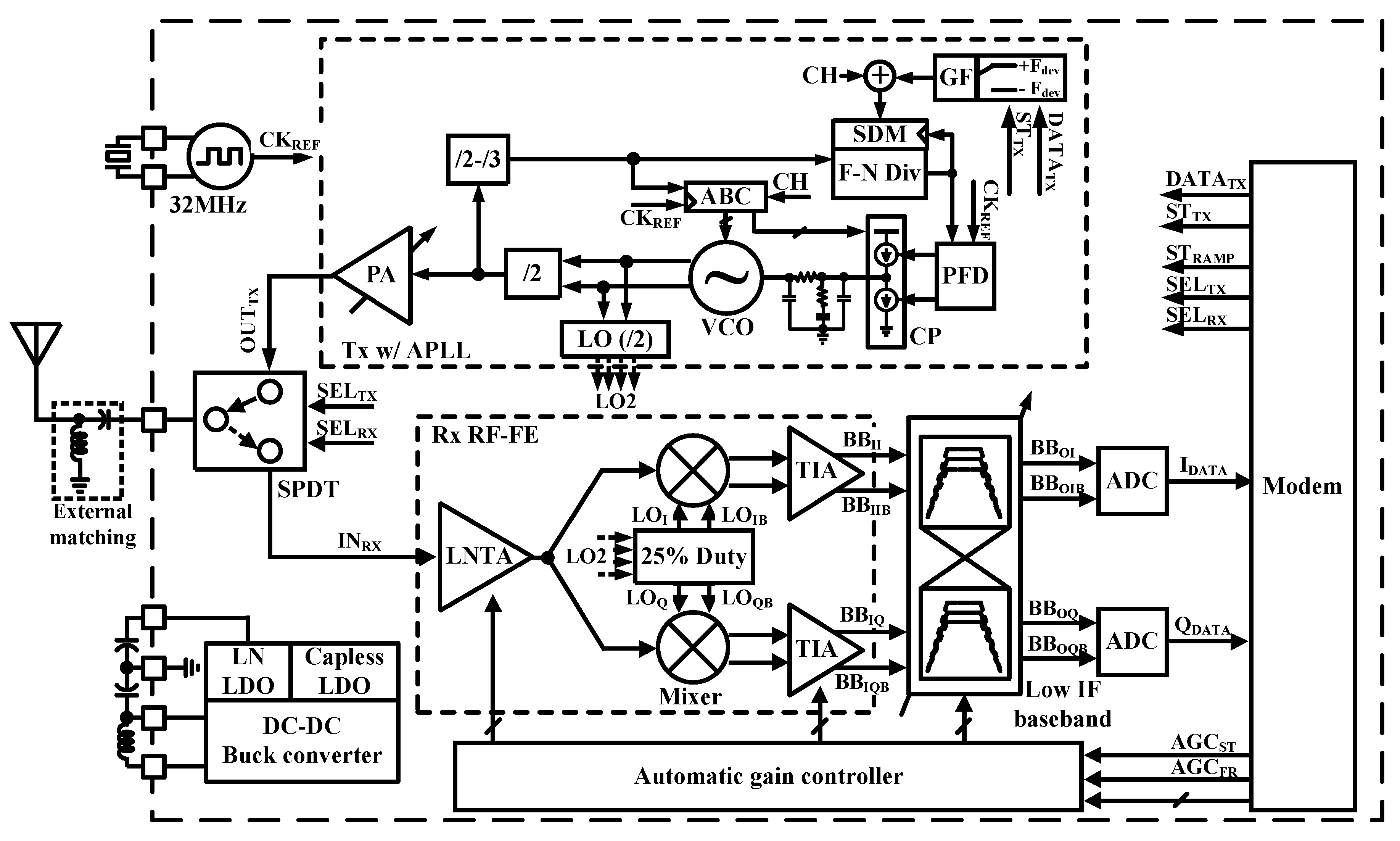
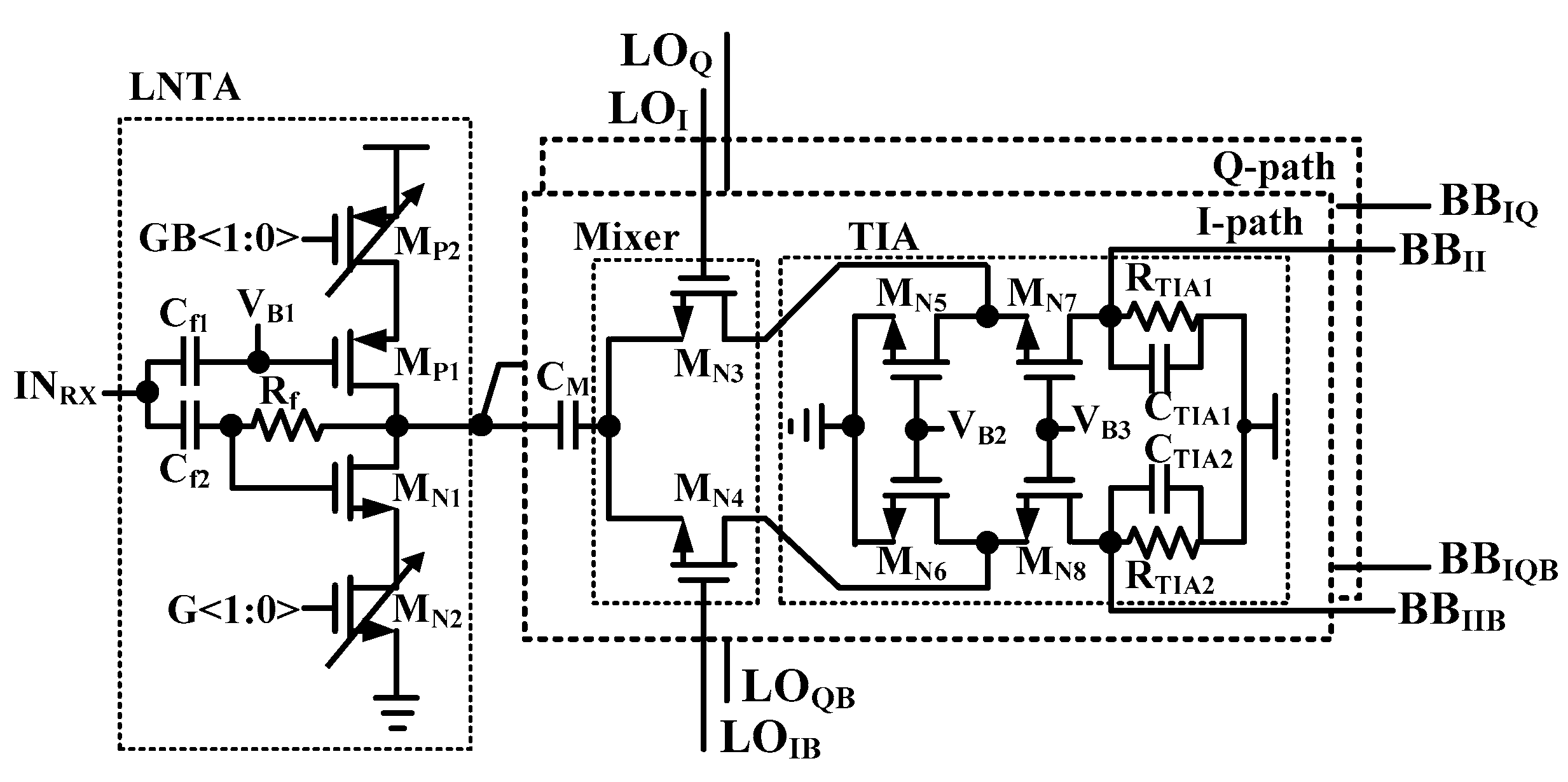
3.1. RX Front-End
Figure 2 shows the schematic of RX RF-FE. The RF-EF is composed of an LNTA, passive mixers with the 25% duty generator, and TIAs. In general, when using a 50% duty cycle LO signal, two LNTAs should be used because the LO signal is overlapped and deterioration of the noise feature of the RF-FE [
6]. However, to reduce the power consumption, only a single-ended LNTA with 25% duty-cycle LO is used instead of two LNTAs in this paper. A 25% duty cycle LO increases 3-dB conversion gain, which lowers the noise contribution of the mixer compared to 50% duty-cycle LO. Since there is no overlapped period between LOs, an LNTA can drive IQ passive mixers without performance degradation. Additionally, current mode operation is adopted for high gain and low noise. The proposed inductor-less LNTA is a combination of a self-biased inverter type amplifier and separated biasing (V
B1). This architecture is more suitable for low power structure than only self-biasing technique because it has a high gain even though the sizes of MOSFETs are small [
11].
Noise figure and gain matching of LNTA are well optimized by controlling V
B1. Impedance matching of RX is realized by sharing SPDT with TX. Although SPDT provides some isolations, RX should consider impedance of TX when turned off. The well estimated TX impedance can mitigate degradation of performance in RF-FE. It guarantees RX to have a sufficient gain and low noise figure at the desired RX band. In a BLE standard, the linearity of mixers is a significant issue because of the process of interferers [
2]. Passive mixers are used in this work with a low supply voltage operation. A current conveyer structure is used for the LNTA and passive mixer. C
M prevents the image current when the switches are turned on simultaneously by overlap between 25% duty cycle LO signals.
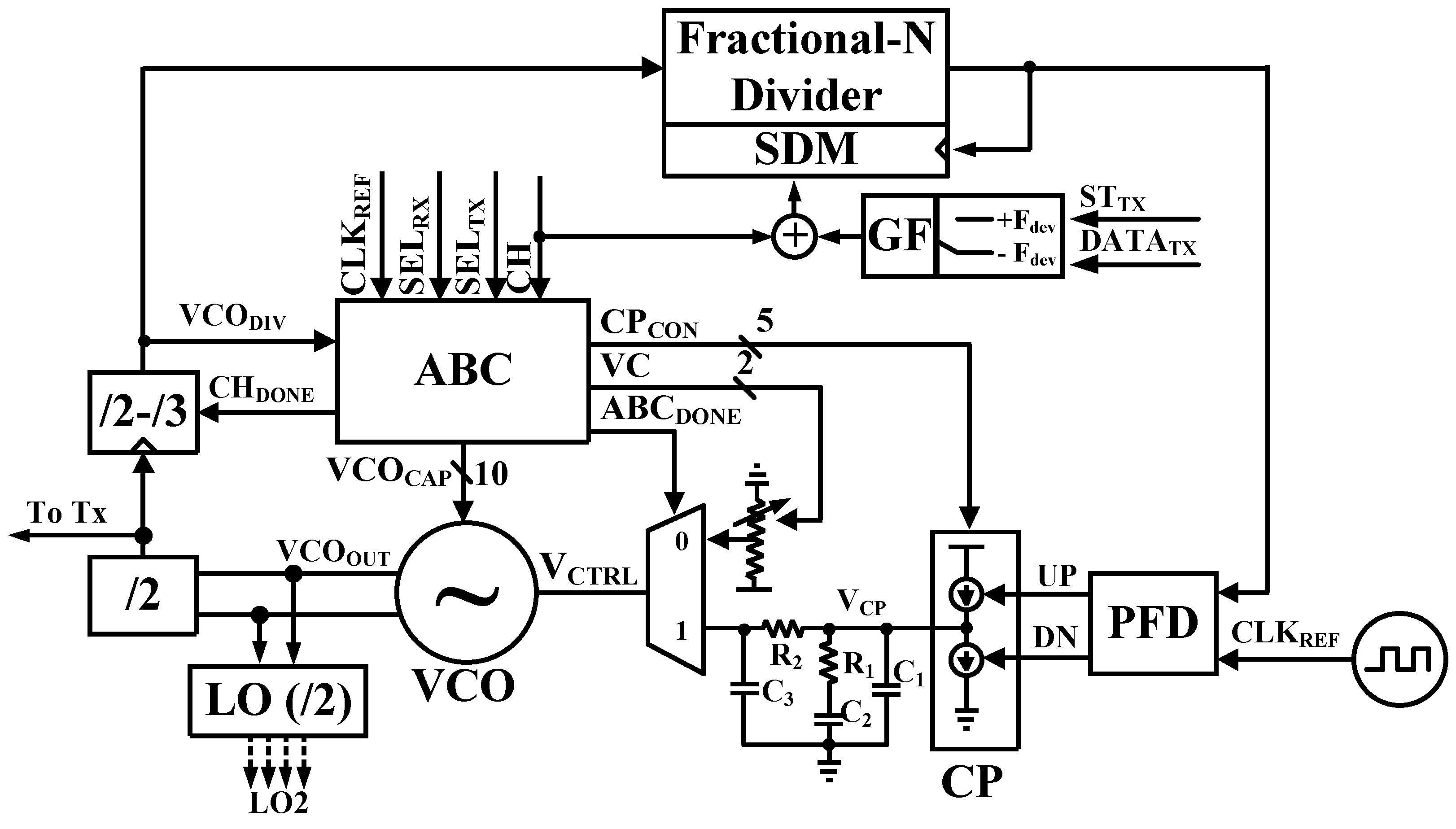
3.2. Phase-Locked Loop (PLL) for RX LO Generator and TX Modulator
Figure 3 shows the block diagram of proposed analog PLL. It is composed of VCO, dividers (/2,/2-/3 and Fractional-N Divider with SDM), PFD, CP, internal third order loop filter, ABC, and the GFSK modulator.
Bandwidth requirement of the PLL is that is wider than the data rate for PLL based on one-point modulation in the TX mode [
10]. Therefore, bandwidth is used about 1 MHz or more. However, bandwidth of approximately 200 kHz was used to meet the specification of bandwidth of the BPF (1 MHz ± 600 kHz) in an RX mode.
The bandwidth of PLL with a 3rd order loop filter can be written as Equation (2) [
3].
where
ωC is the bandwidth of the PLL,
KVCO,
ICP, and
N are the gain of VCO, and the current of CP, and division ratio of the divider, respectively. Additionally,
R1,
R2,
C1,
C2, and
C3 are resistors and capacitors of the third order loop filter. In Equation (2), the bandwidth is determined from parameters of the third order loop filter.
Table 1 shows the PLL loop parameter according to the loop bandwidth depending on the TX and RX mode. After determining parameters of the loop filter, the target frequency and bandwidth of PLL are determined with ABC. To adjust the desired bandwidth, the frequency of VCO is calibrated to target frequency and measure the
KVCO. The
ICP can be calculated by applying the measured
KVCO and fixed
N value to Equation (2). As can be seen from the table, the TX and RX bandwidths are different from each other. The PLL lock time is proportional to the 4/bandwidth, which makes the RX PLL locking time about 20 μs [
12]. Since the TX/RX switching time is 150 µs from the BLE specification [
2], the RX PLL locking time can satisfy the BLE specification with the certain margin.
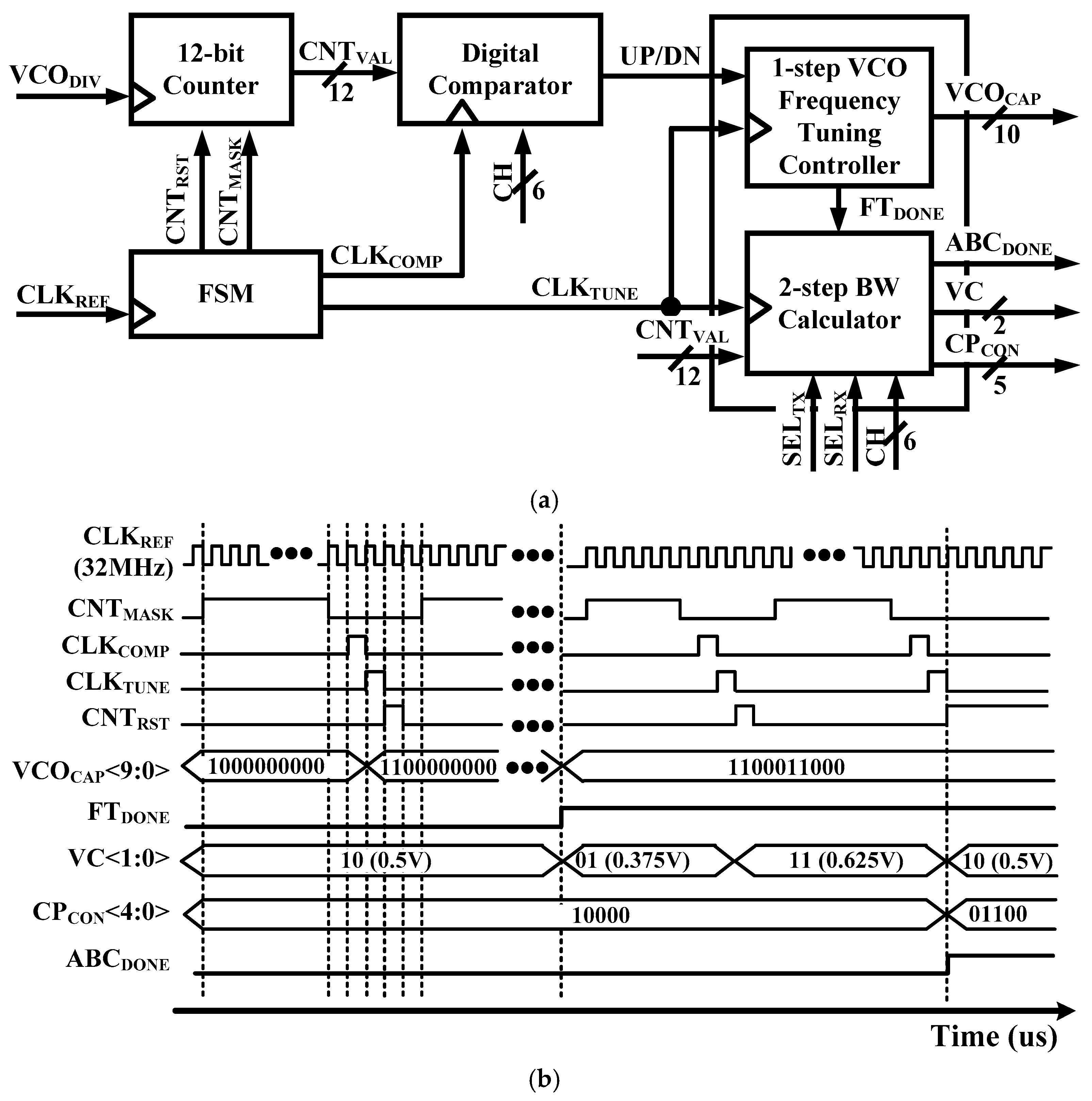
Figure 4a,b show a block diagram and timing diagram of the ABC block, respectively. The ABC block is composed of a 12-bit Counter, a Finite-State Machine (FSM), a Digital Comparator, a VCO Frequency Tuning Controller, and BW Calculator. ABC block works with the reference clock signal (CLK
REF) to generate a Reset Counter (CNT
RST), Enable Counter (CNT
MASK), Decision Counter (CLK
TUNE), and Comparison Clock (CLK
COMP) signals through FSM. Since the frequency tuning process is frequency tracking, a digital accumulator is used to estimate the period of the VCO.
The ABC block is operated by two-step as follows.
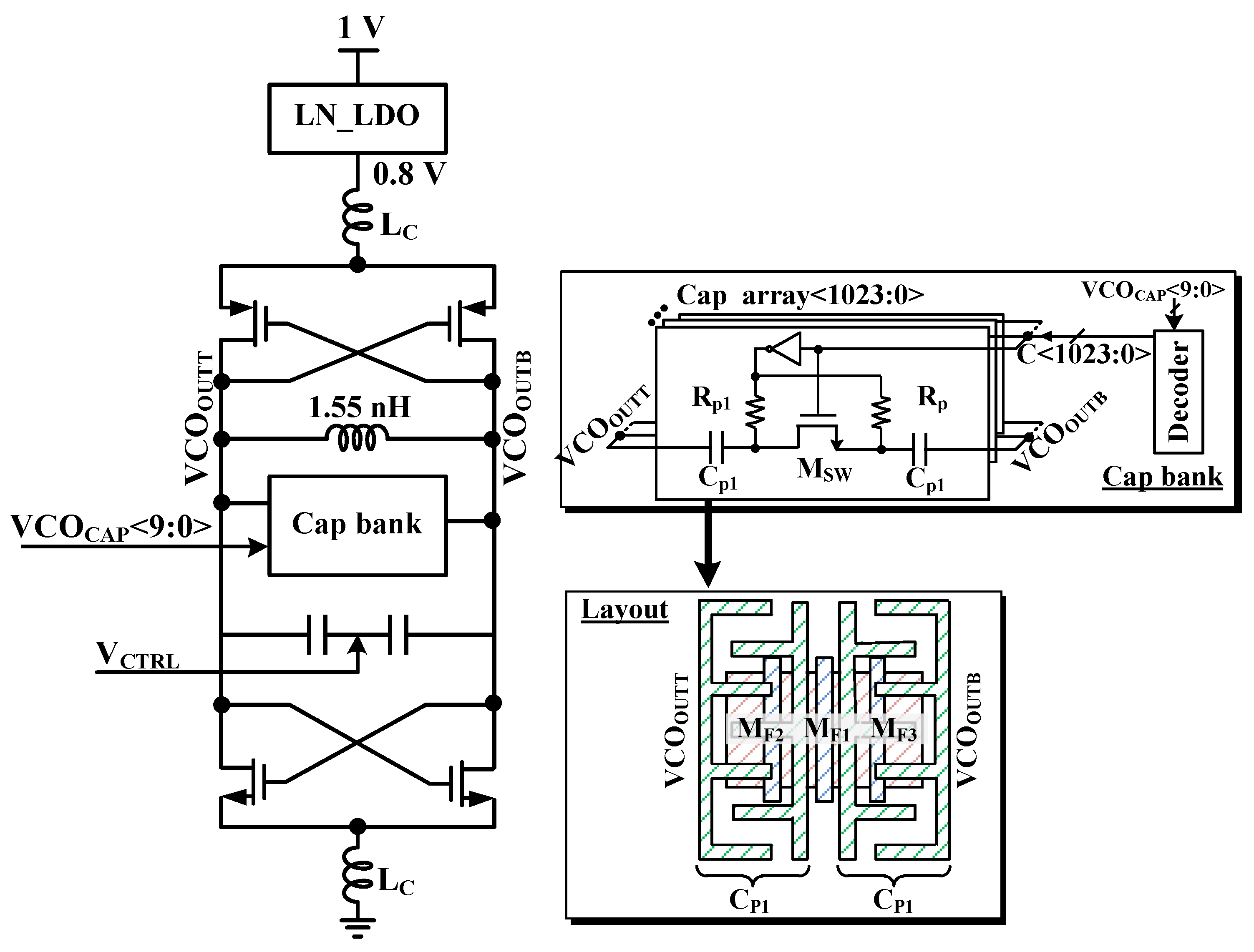
Step 1: metal-oxide-metal (MOM) capacitances of the cap bank of VCO are controlled by VCOCAP<9:0> in this step. Optimum MOM capacitances are selected through a VCO Frequency Tuning Controller. Free-running frequency of the VCO is near the target channel frequency after the frequency tuning of VCO is completed.
Step 2: Calculation of the bandwidth begins when frequency tuning of the VCO is completed. The K
VCO is defined as the frequency range of the VCO with respect to a V
CTRL change. Thus, V
CTRL is changed by changing VC<1:0>. K
VCO is calculated as Equation (3).
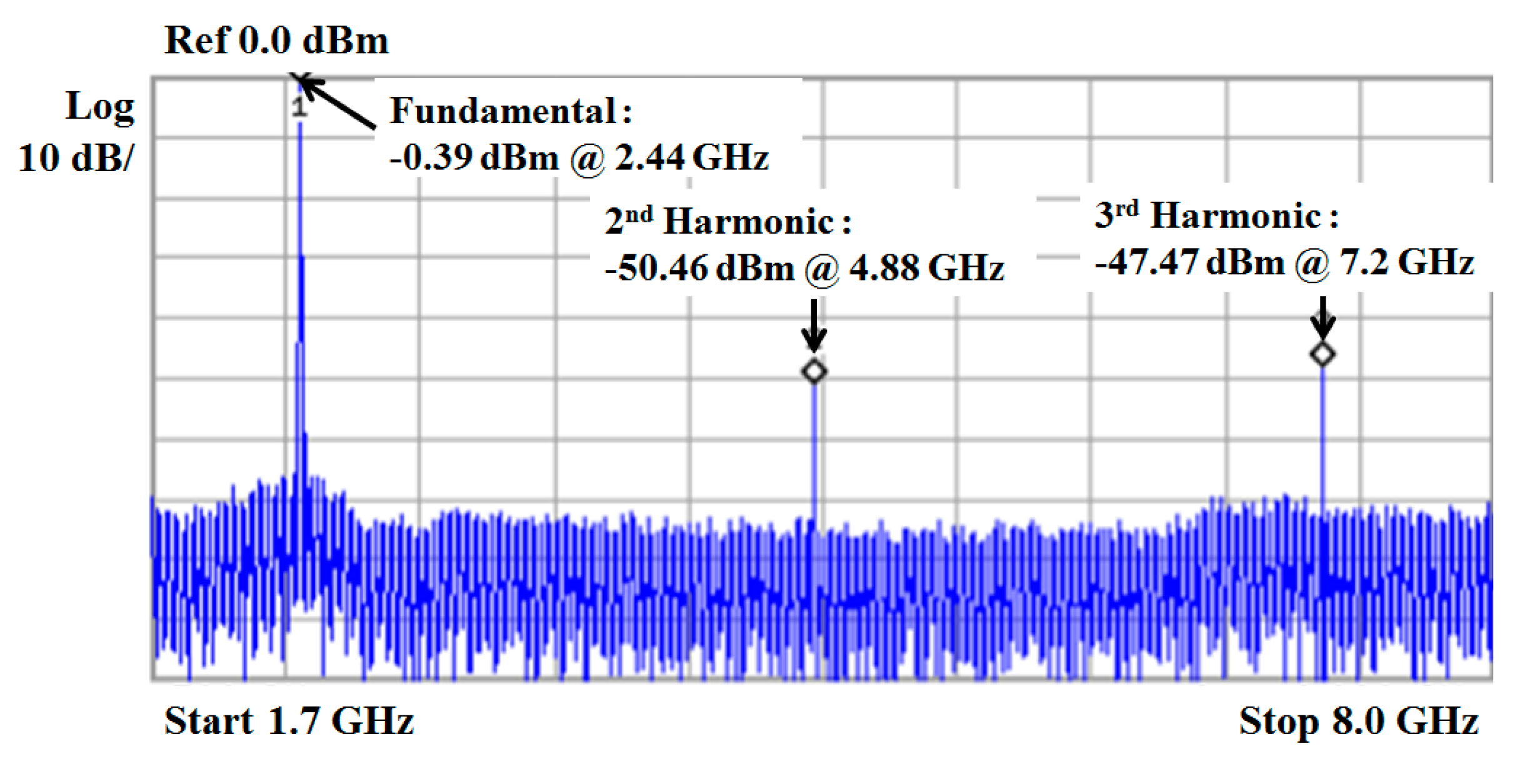
When TX modulation is enabled and frequency is changed abruptly, the spurious emission mask can’t be met at output of the transmitter due to harmonic tones. When input of TX Data is ‘0’ or ‘1’, the modulation deviation value is added or subtracted from carrier frequency. By mapping and filtering, levels of spurious tones can be reduced by changing inputs to the DSM in PLL.
The Fractional-N Divider is composed of the pulse-shallow counter with divide-by-4/5 and 3-order DSM. Output frequency of the proposed analog PLL is calculated as Equation (4).
The value of PREDIV is 3 and 2 when the channel frequency is channel-15 and other channels, respectively. Values of PC, SC, and MC are determined in the channel table of PLL with respect to the channel value (CH). The value of FDEV is 10,923 and 16,384 when channel frequency is 15-channel and other channels, respectively. The modulation value adds or subtracts the value of FDEV to the value of MC when TXDATA is ‘1’ and ‘0,’ respectively.
Figure 5 shows proposed VCO with MOM capacitor bank. The proposed VCO is designed with MOM capacitors in this paper. They are stacked from Metal 3 to Metal 5 for high capacitor density and reduced die area [
13].
3.3. Low IF Base-Band Analog
The low-IF RX requires a block for image rejection. Proposed receiver structure uses the pair of the complex BPF for rejecting the image band.
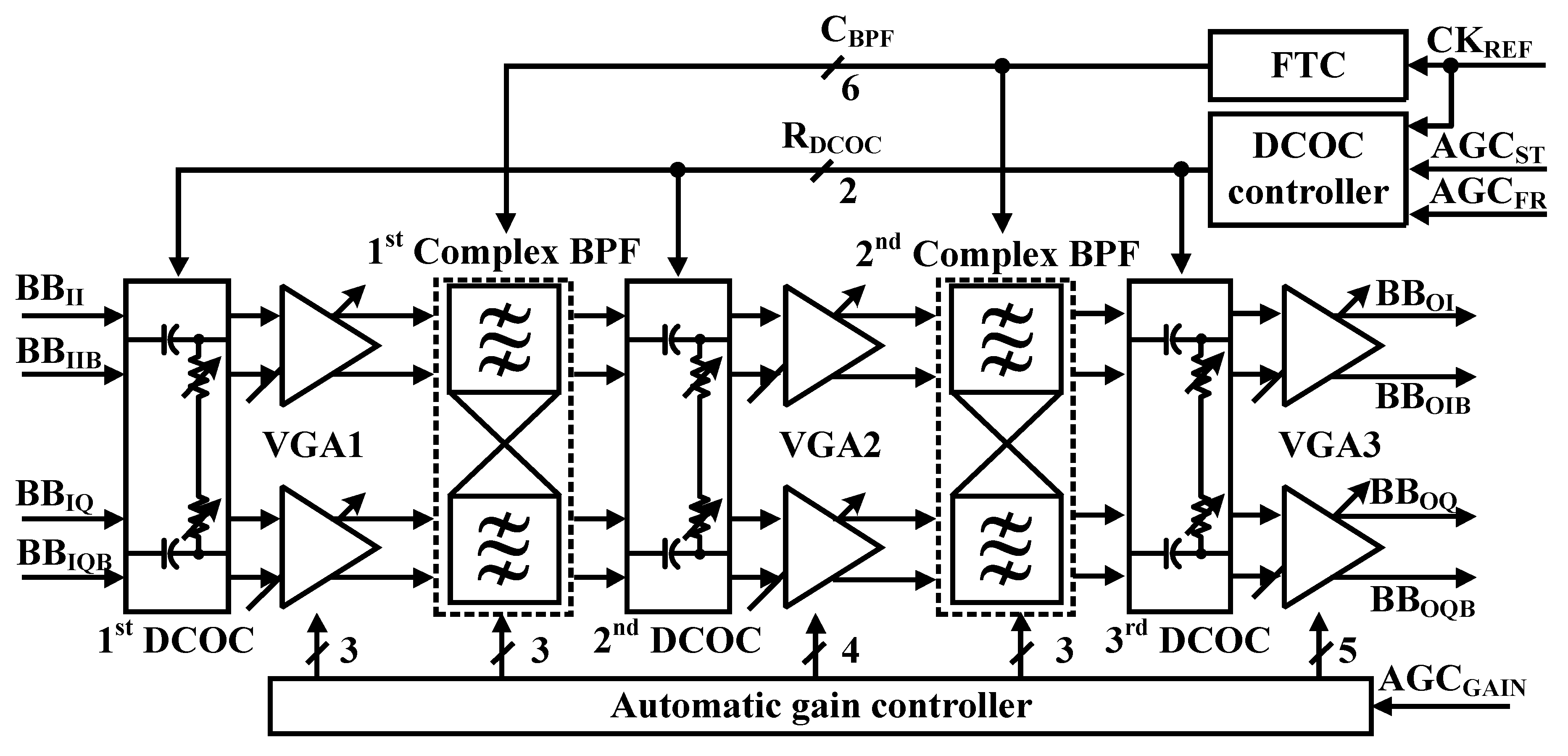
Figure 6 shows the block diagram of the proposed low-IF BBA. It is composed of three stage VGAs, two 2nd order BPFs, and three DCOC [
14]. Total dynamic range of BBA is 88 dB. The gain of VGAs (VGA1, VGA2, VGA3) and BPFs (BPF1, BPF2) are 20 dB and 14 dB, respectively. A high pass filter (HPF) is used for the DCOC. According to the amplitude of RF signal changes the gain of BBA.
The baseband produces a constant output voltage for the ADC input range during AGC timing. The proposed BLE receiver uses VGA to achieve constant baseband output. The gain of VGAs is adjusted by using the resistor ratio. An AGC is proposed to control gain of the BBA automatically during the preamble duration of eight symbols (8 µs) [
2]. Preamble duration is too short, which is 8 μs in BLE specification. Settling-timing of AGC is determined by group delay of BBA. Bandwidth of DCOC (BW
DCOC) is dominant in group delay of BBA. If BW
DCOC is too wide at the Measure_AGC period to reduce group delay, MODEM achieves invalid information gain since output of BBA is too attenuated. Conversely, if BW
DCOC is too narrow to achieve characteristics of attenuation, MODEM achieves invalid information of gain since output of BBA cannot be settled down properly. Therefore, the BW
DCOC can be controlled by the DCOC controller so that bandwidth becomes wide enough during preamble duration to operate the AGC loop in this paper.
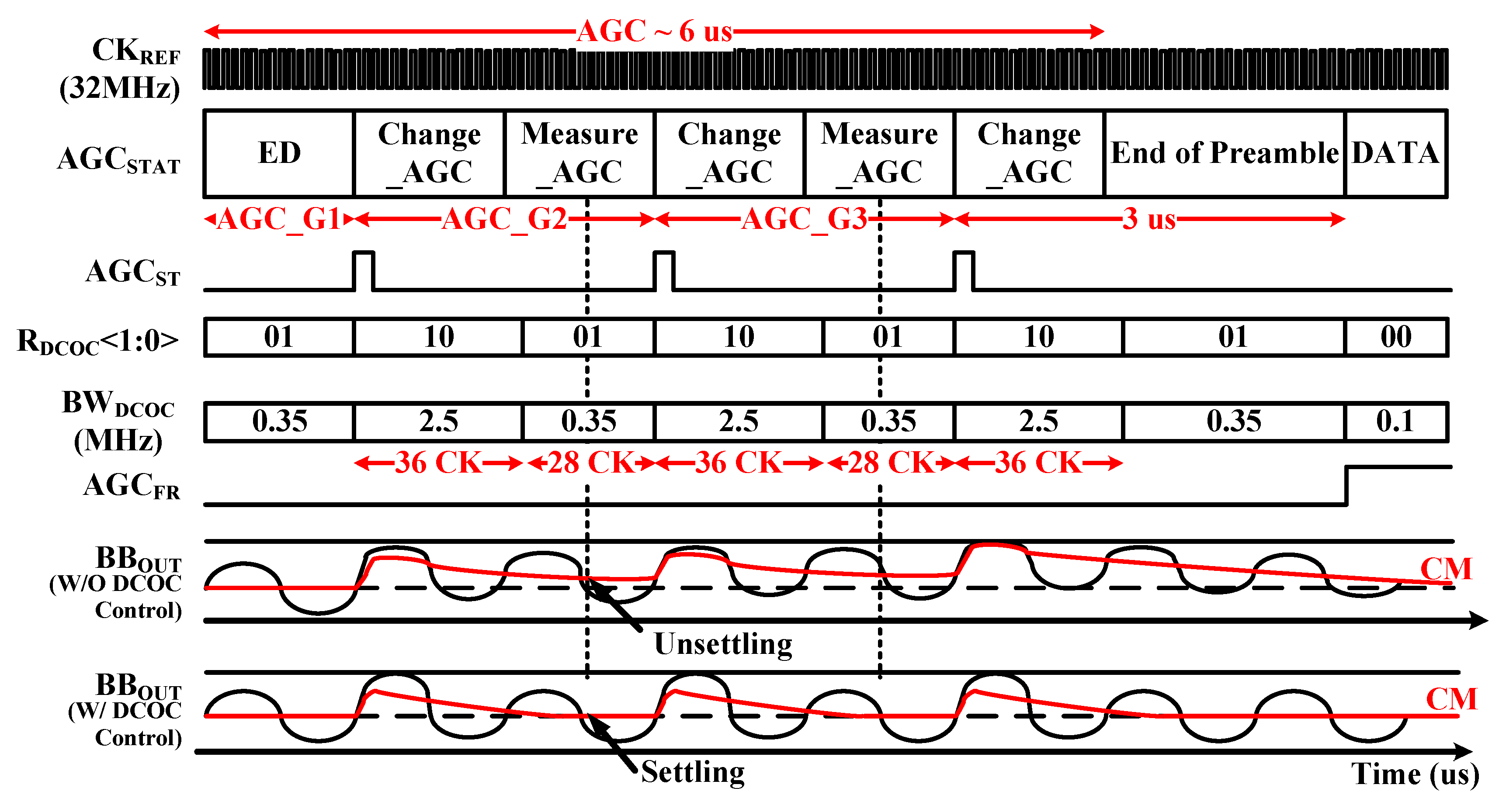
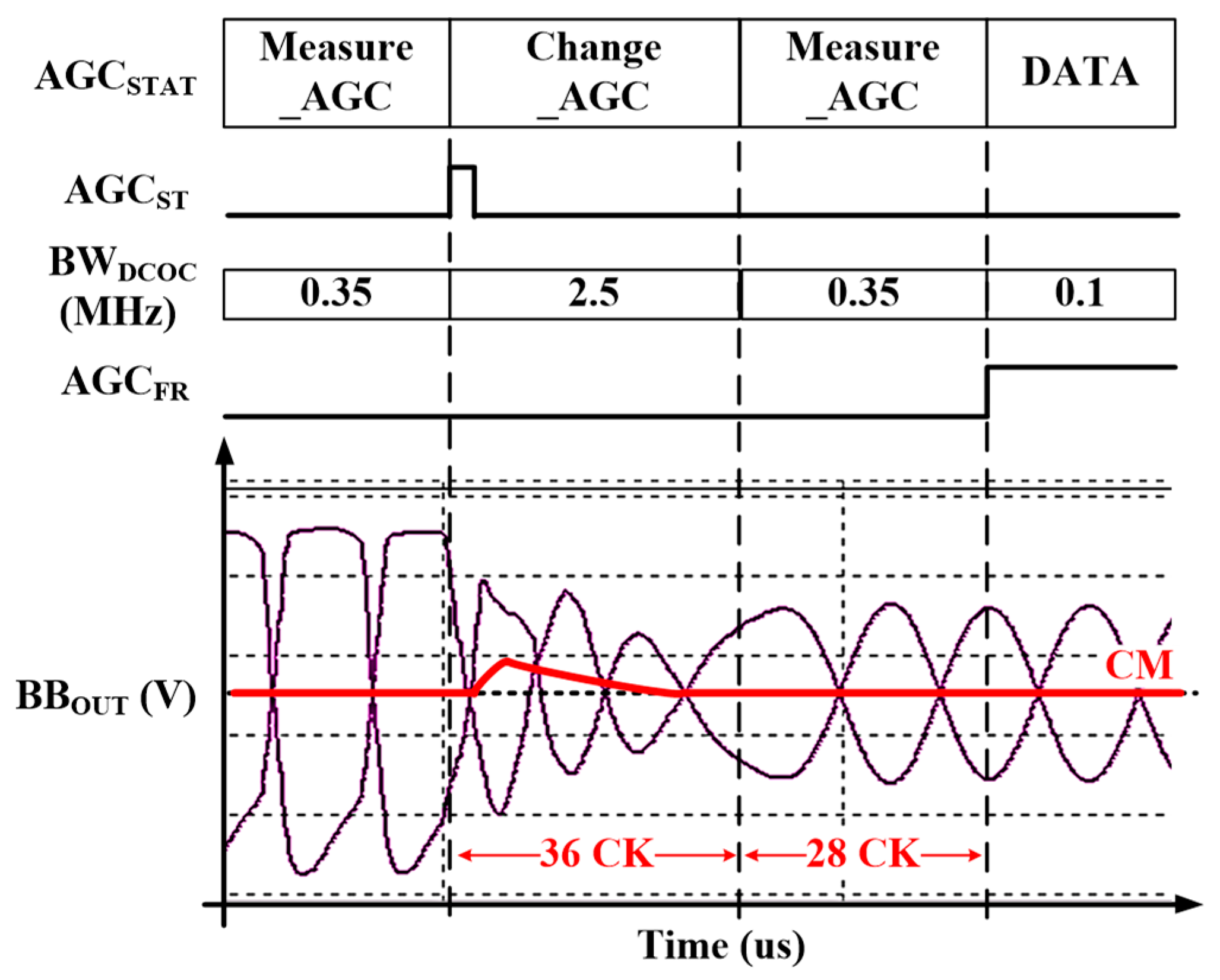
Figure 7 shows the timing diagram of the proposed DCOC controller according to operation of AGC. The AGC should control the gain of BBA within 2 µs by the MODEM. Therefore, gain of BBA can be controlled a maximum of three times since the preamble time is 8 μs.
First, during the ED interval in AGC_G1, input level of −50 dBm is detected by the peak detector, and the initial gain is set by MODEM. In AGC_G2, the AGC starts and the gain value of BBA is determined coarsely. If the BBA output of the level cannot reach the desired level, the gain value of BBA is determined finely in AGC_G3. After AGC_G3, the gain value is set.
In the AGC operation, the BW
DCOC should be changed to guarantee completion of AGC within 8 µs by controlling the R
DCOC<1:0> [
2]. The BW
DCOC is 2.5 MHz during 36 clocks of CK, and BB
OUT is settled fast since the gain information of BBA is not critical at Change_AGC period. After 36 clocks, the BW
DCOC is changed to 350 kHz since the 3-dB bandwidth of BBA is from 400 kHz to 1.6 MHz. When the AGC operation is finished, the freeze signal of AGC (AGC
FR) becomes high. The BW
DCOC is changed to 100 kHz that does not affect the bandwidth of BBA. As shown in
Figure 7, if the BW
DCOC is fixed, BBA gain cannot be determined accurately since the common mode of outputs of the BBA is not settled properly. If the settling is not completed during the preamble period, data errors can occur.
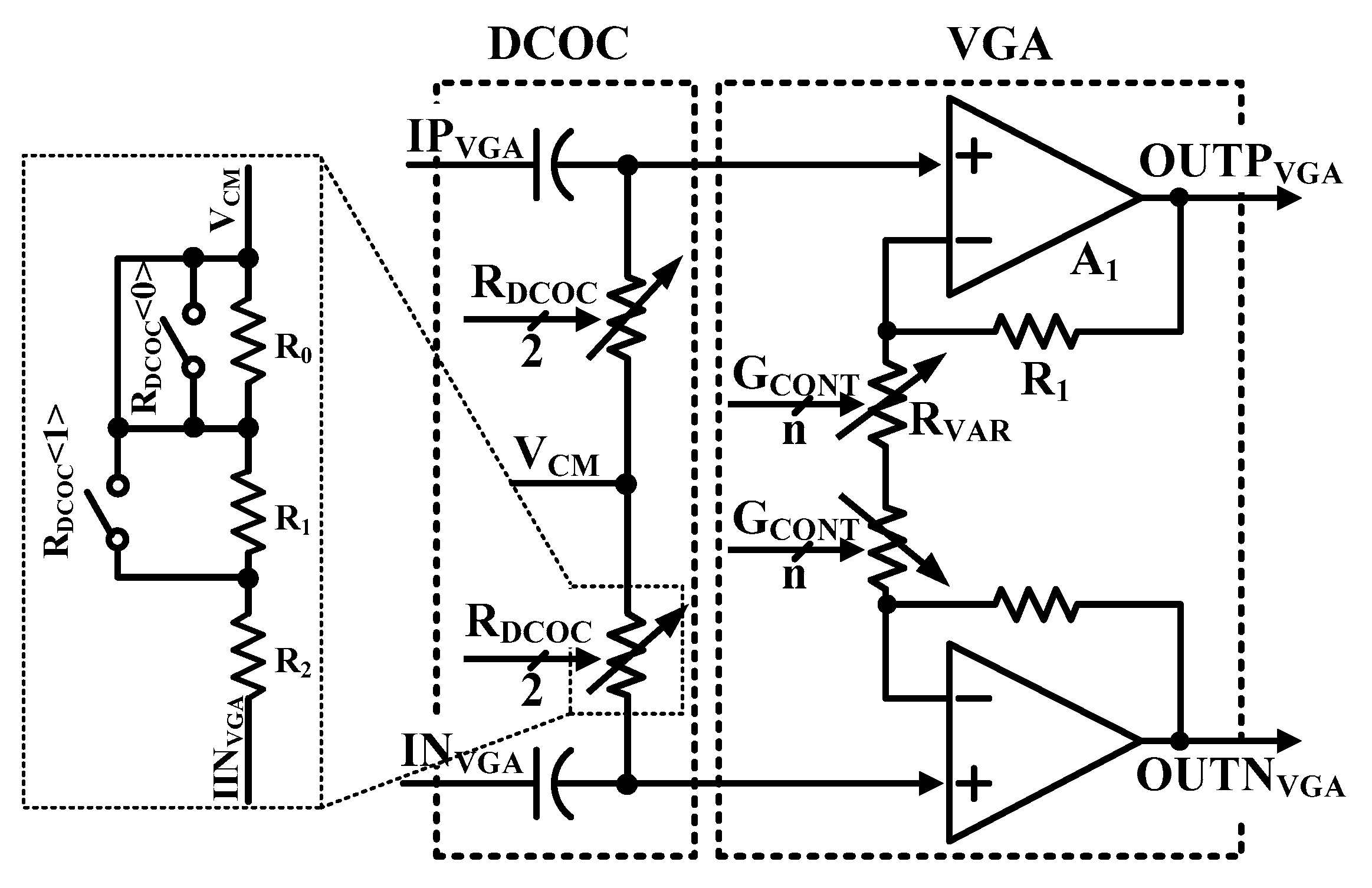
As shown in
Figure 8, the pseudo differential structure is used for the VGAs for infinite input impedance. Gain steps of VGA1, VGA2, and VGA3 are 4 dB, 2 dB, and 1 dB, respectively [
15]. The VGAs use a differential to a single two-stage amplifier. Because input impedance of VGA is high, it does not affect the previous stage. The VGA is designed to have wide dynamic range and its gain is controllable by the modem system. Gain control scheme using the resistor bank is used in this design. Gain of VGA is controlled digitally by a digital modem.
Gain range is from 0 dB to 60 dB. The gain (A
V) of VGA is determined by the ratio of R
1 and R
var, as shown in Equation (5). Since the gain is controlled by the relative ratio of resistors, the error of the gain is small depending on PVT variations.
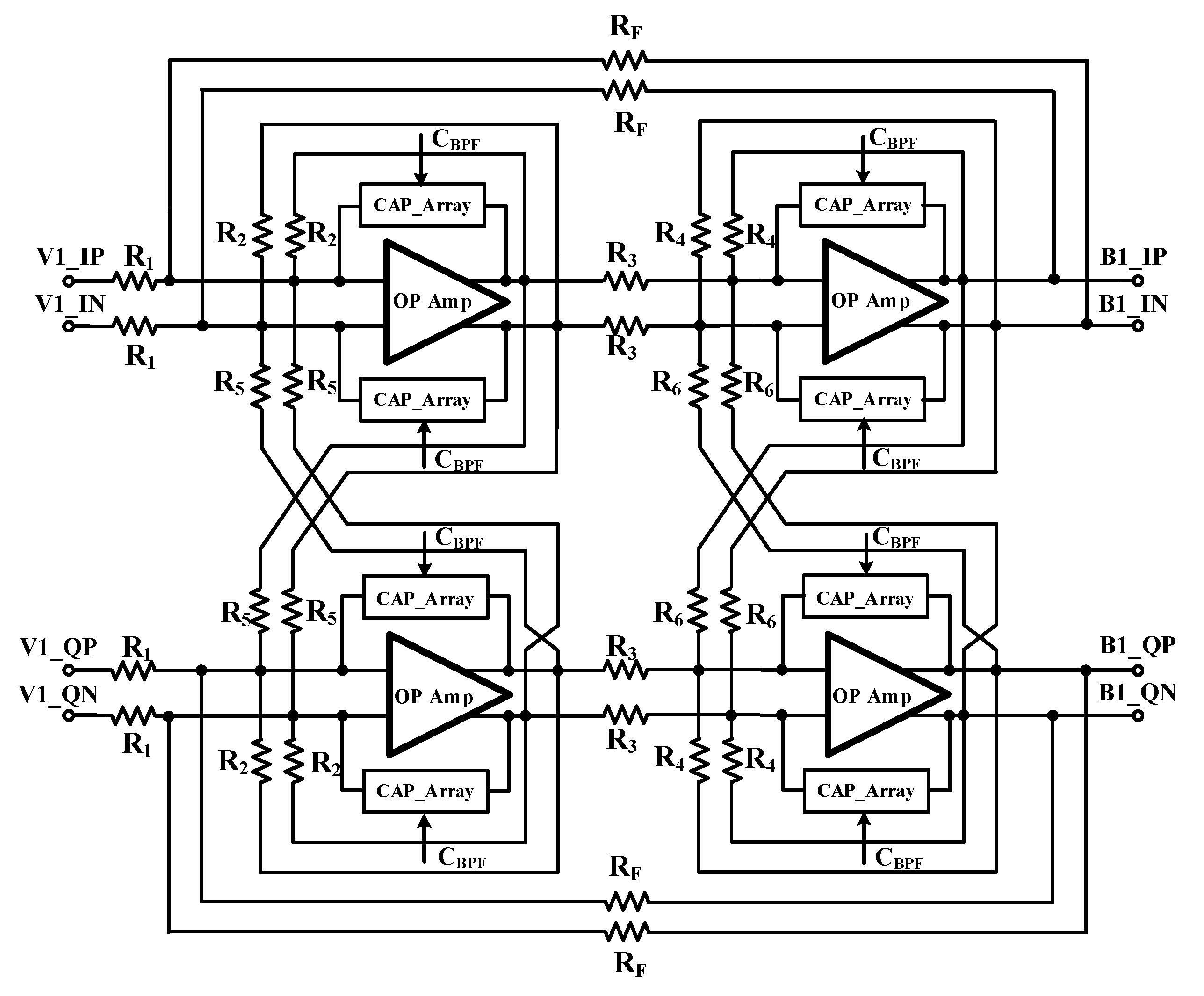
Figure 9 shows the designed 2nd-order Chebyshev complex BPF. To achieve the complex operation, it uses in-phase signal and quadrature signal. Characteristic of BPF is made by the low pass filter (LPF) characteristic shifting DC to IF using a cross coupled resistor [
14]. To reduce process variation, capacitor arrays are composed of capacitor and MOS switches. It controls the bandwidth of the BPF and its control signals (C
BPF) are determined by FTC. Center frequency of the complex BPF is 1 MHz and 3-dB bandwidth is 1.2 MHz. Image frequency rejection ratios is 36 dB [
15].
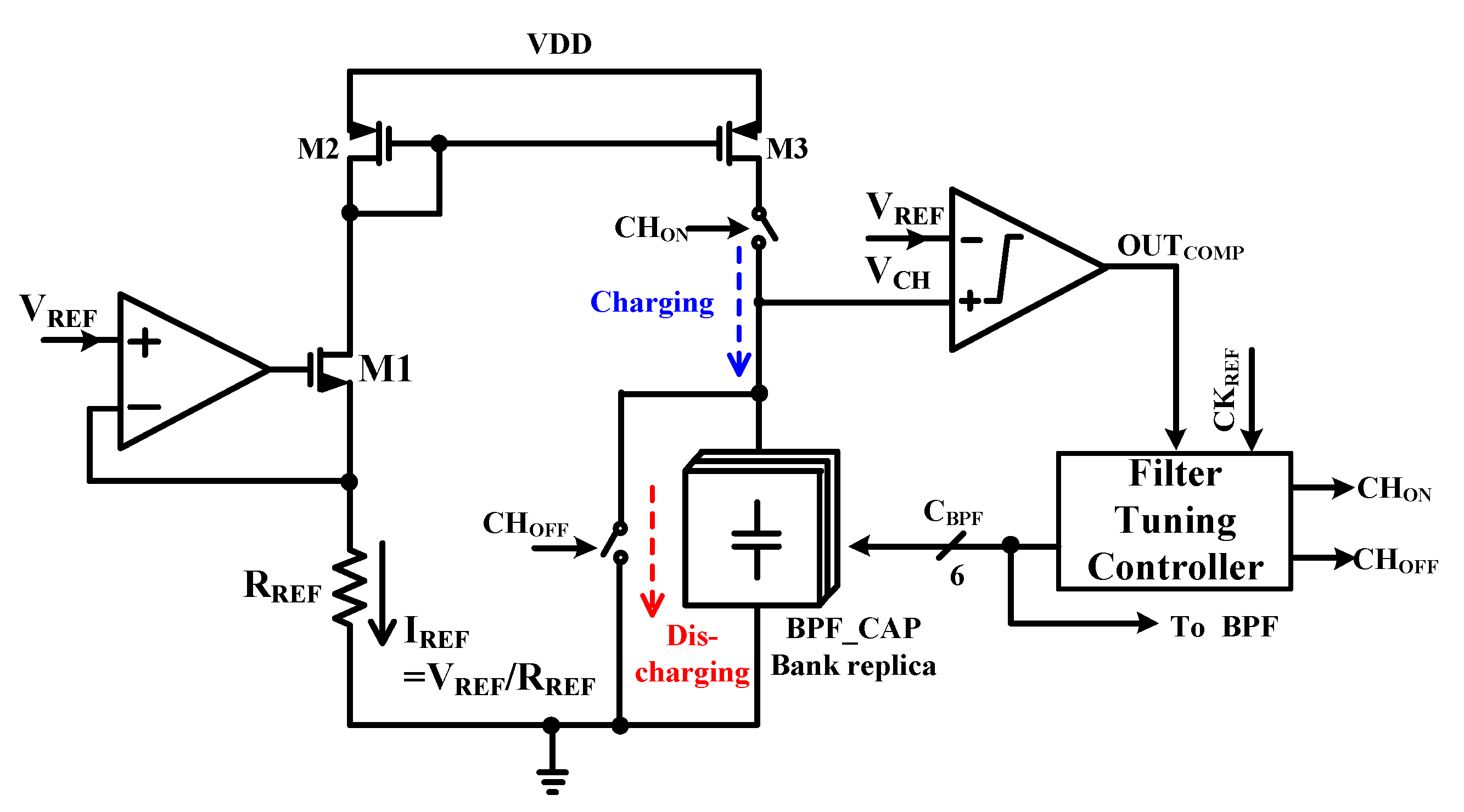
Figure 10 shows a schematic of the FTC. It must compensate a capacitance and resistance variation according to process variation. It is composed of current mirror and capacitor array for generating charging voltage (V
CH) and comparator and filter tuning controller. If values of resistors and capacitors are changed by process variation, the charge time of V
CH is changed. After then, filter tuning controller compares V
CH charge time with reference charge time. In this paper, the capacitor is only tuned because resistor variation is reflected in I
REF variation. Resistance of R
REF is the same as bandwidth resistor value of BPF to apply resistance variation of the same ratio. It can reduce the tuning time and die area.
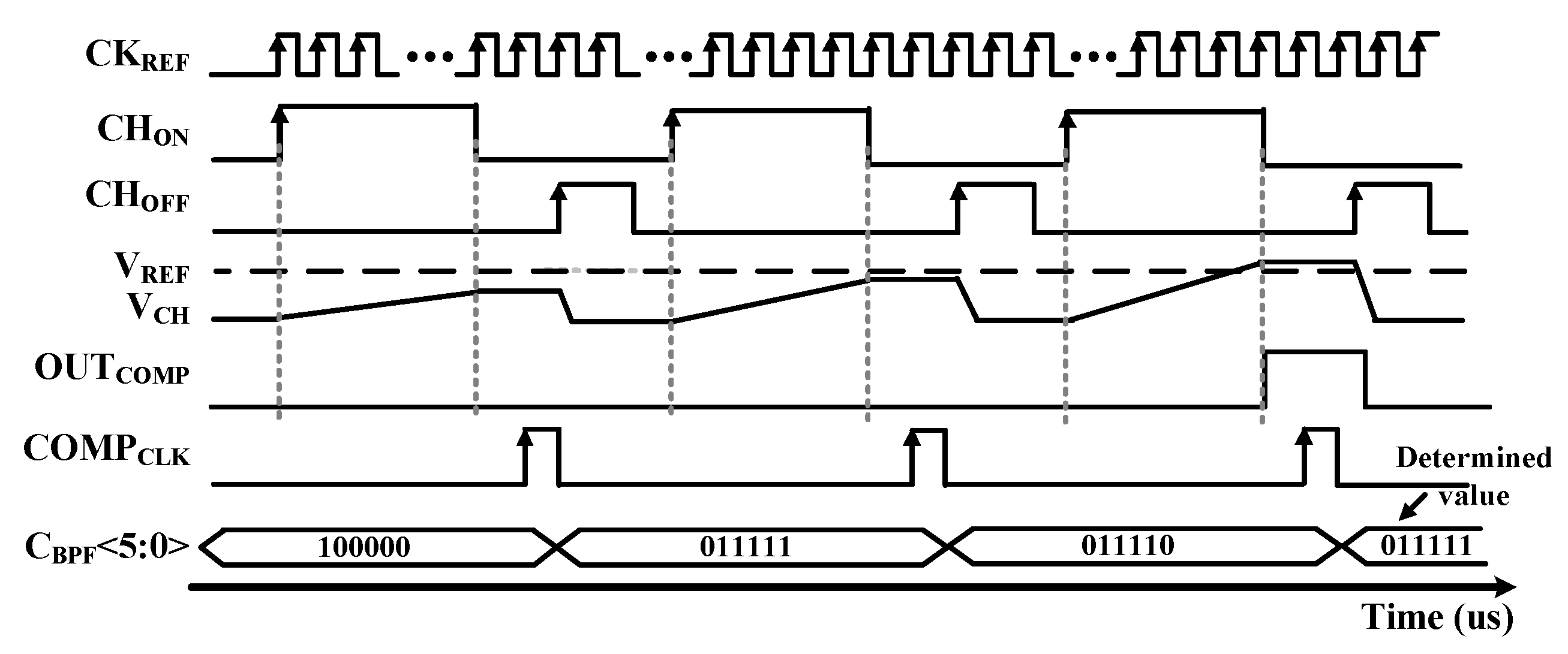
Figure 11 shows the timing diagram of FTC. When CH
ON signal is high, the V
CH is increased by charging the BPF CAP BANK replica. Output of the Comparator (OUT
COMP) becomes high when V
CH is higher than V
REF. If the OUT
COMP is low when COMP
CLK is high, the value of C
BPF is decreased by FTC and start the calibration loop again. Therefore, if the OUT
COMP is high when COMP
CLK become high, the value of C
BPF is increased. In addition, if the OUT
COMP value is changed by comparing the value of the previous state, the calibration is finished to reduce the tuning time. After calibration, the determined value of C
BPF is applied to the capacitor array of two 2nd order complex BPFs. The maximum tuning time is 150 μs of 32 cycles. If the tuning process is completed, the FTC is turned off to save power consumption.
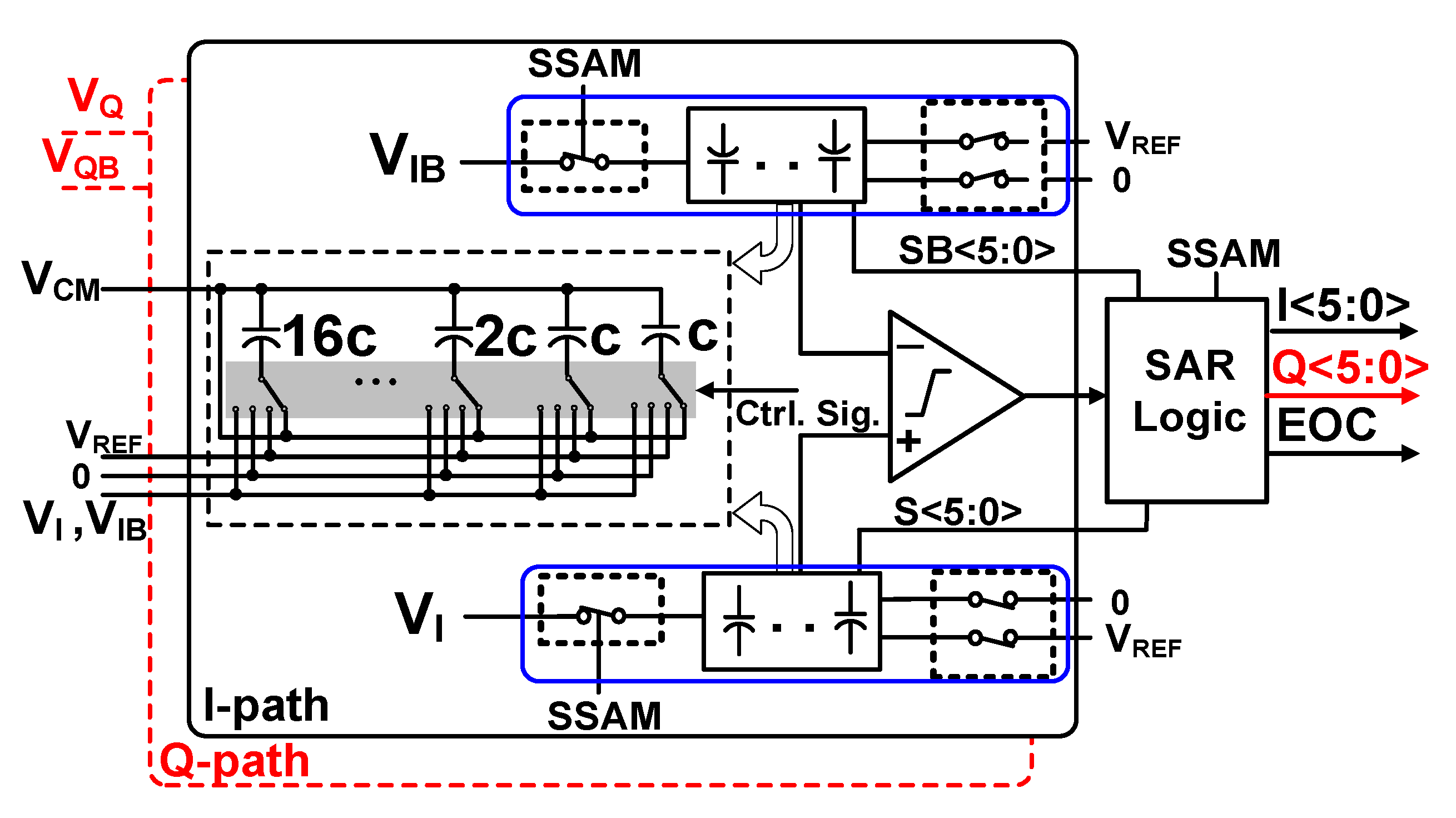
3.4. Analog to a Digital Converter
Figure 12 proposes the designed 6-bit fully differential SAR ADC structure. The resolution of ADC required in modem requires 5-bit, but was designed with 1-bit margin when designing the SAR ADC. Input signals of the ADC include V
I, V
IB, and V
Q, as well as V
QB that are differential inputs. Therefore, two parallel ADCs should be applied in the proposed receiver. Each ADC is composed of a comparator and two binary-weighted capacitor arrays. The SAR logic controls the switching sequence of these ADCs. The fully differential structure of the ADCs reduces the substrate and supply voltage noise, and has a good Common Mode Rejection Ratio (CMRR) [
16].
Capacitor arrays of this ADC operate as sample and hold circuits and DACs. Significant power consumption of the SAR ADC may occur due to switching in the capacitor array. The switching sequence of the proposed structure is common mode voltage (V
CM)-based and straightforward. Previous works have proven the V
CM-based straightforward ADCs as one of the most energy efficient structures [
17].
In the VCM-based switching and after sampling, in each cycle, one of the capacitors of the capacitor array switches from VCM to the Reference Voltage (VREF) or 0, according to the comparator decision. This switching voltage value is half of the one in the conventional SAR ADC structures. Therefore, switching power consumption is reduced significantly. Switching is straightforward, which means that only the next capacitors will be switched, and previously switched capacitors will not switch until the current switching cycle finishes and the next switching cycle starts. This sequence of switching minimizes switching steps and reduces power consumption. As voltages across capacitors are changed only from VCM to VREF or from VCM to 0 V, charging and discharging the time of capacitors decreases, which is useful when conversion speed of the ADC increases.
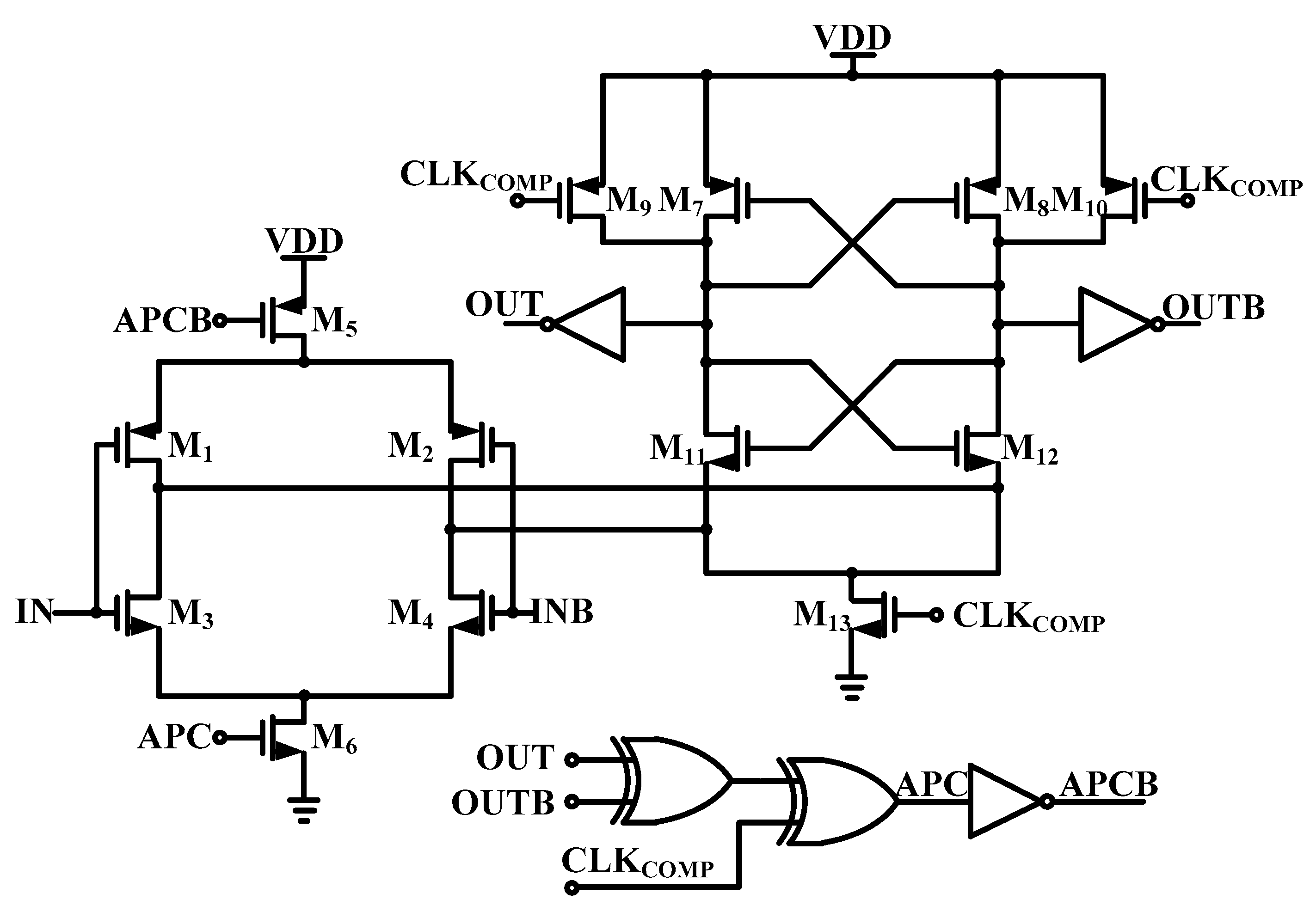
Figure 13 shows the dynamic latched comparator applied in the ADC. It is composed of the pre-amplifier and dynamic latch to prevent kick noise. The pre-Amplifier has N-type and P-type differential input pair for rail-to-rail input range. Power efficiency of the conventional dynamic latched comparator is poor due to the static current even after comparison operation. In this work, through the APC logic after pre-amplifying and output decision, static current consumption of the pre-amplifier is blocked, which improves the power efficiency of the ADC [
17].
3.6. DC-DC Buck Converter and LDO
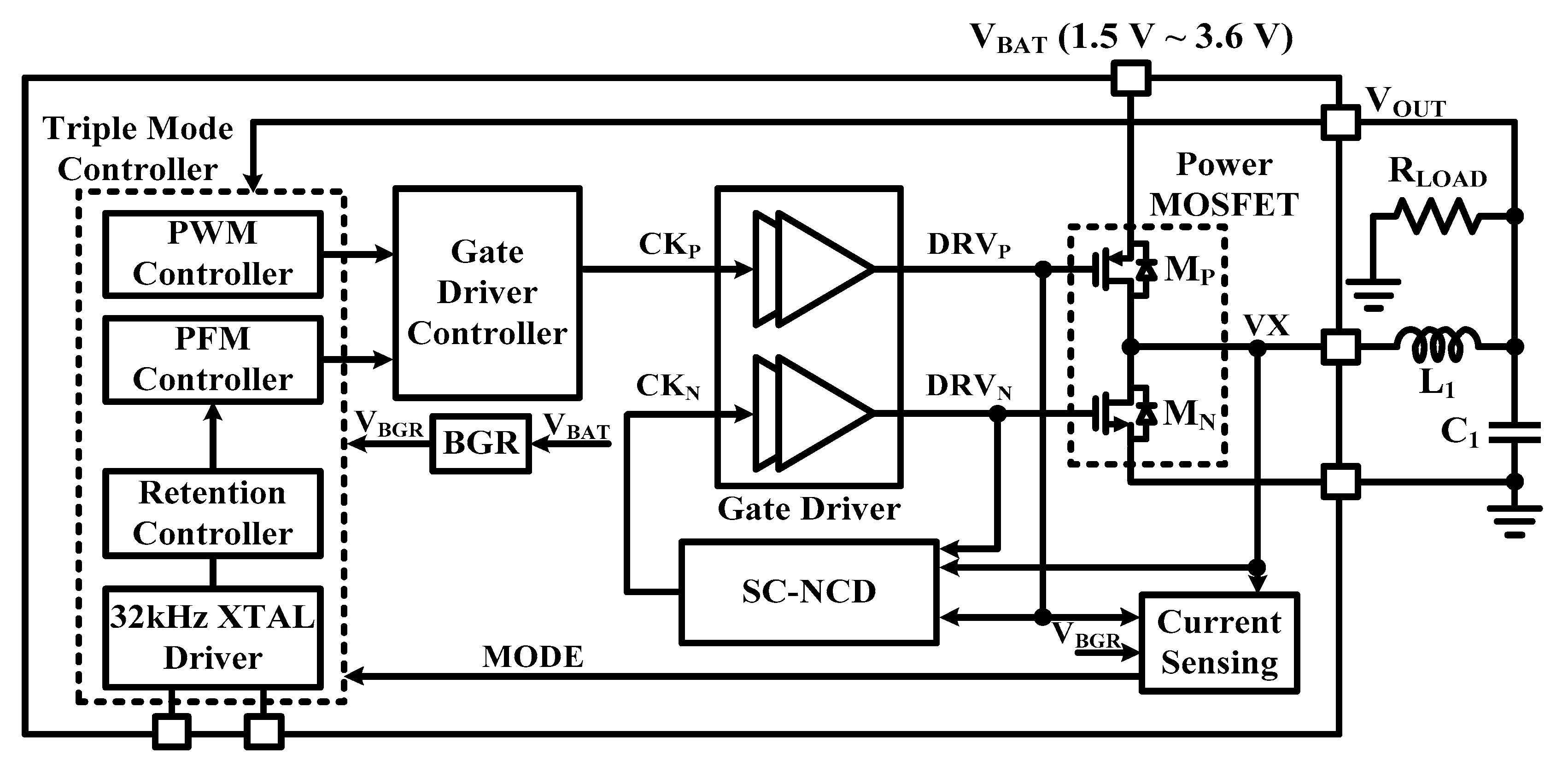
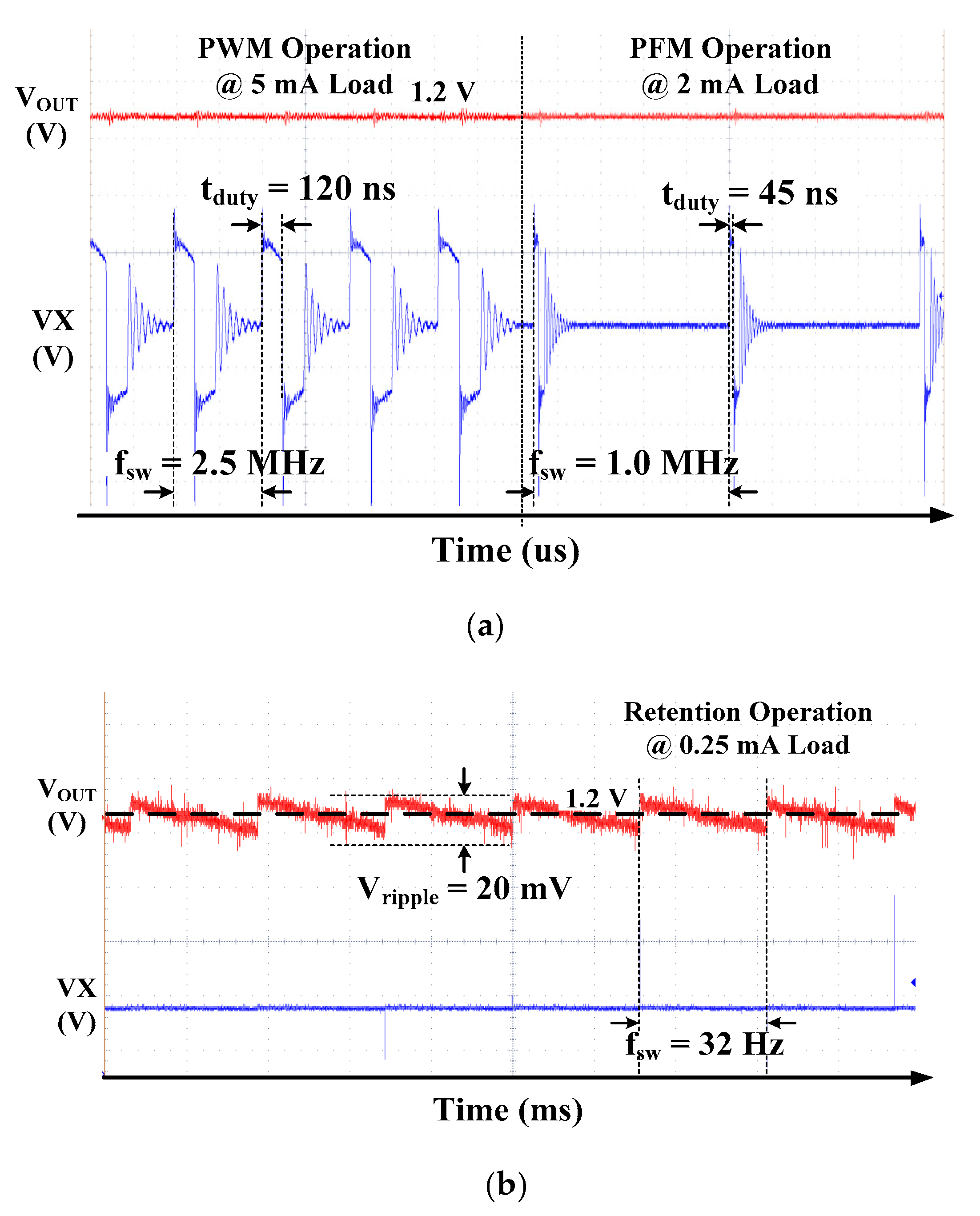
Figure 15 shows a block diagram of the proposed triple-mode DC-DC buck converter. It is composed of a bandgap reference (BGR), Power MOSFETs, self-calibration negative current detector (SC-NCD), and the triple-mode (PWM, PFM, and retention) controller. Each mode has different characteristics to achieve the wide load current range. The PWM mode controller is designed to operate in the active state to provide good regulation characteristics of V
OUT with low output ripple. Retention and PFM mode controller are designed to reduce switching losses and internal current consumption since the operation is a sleep or stand-by state [
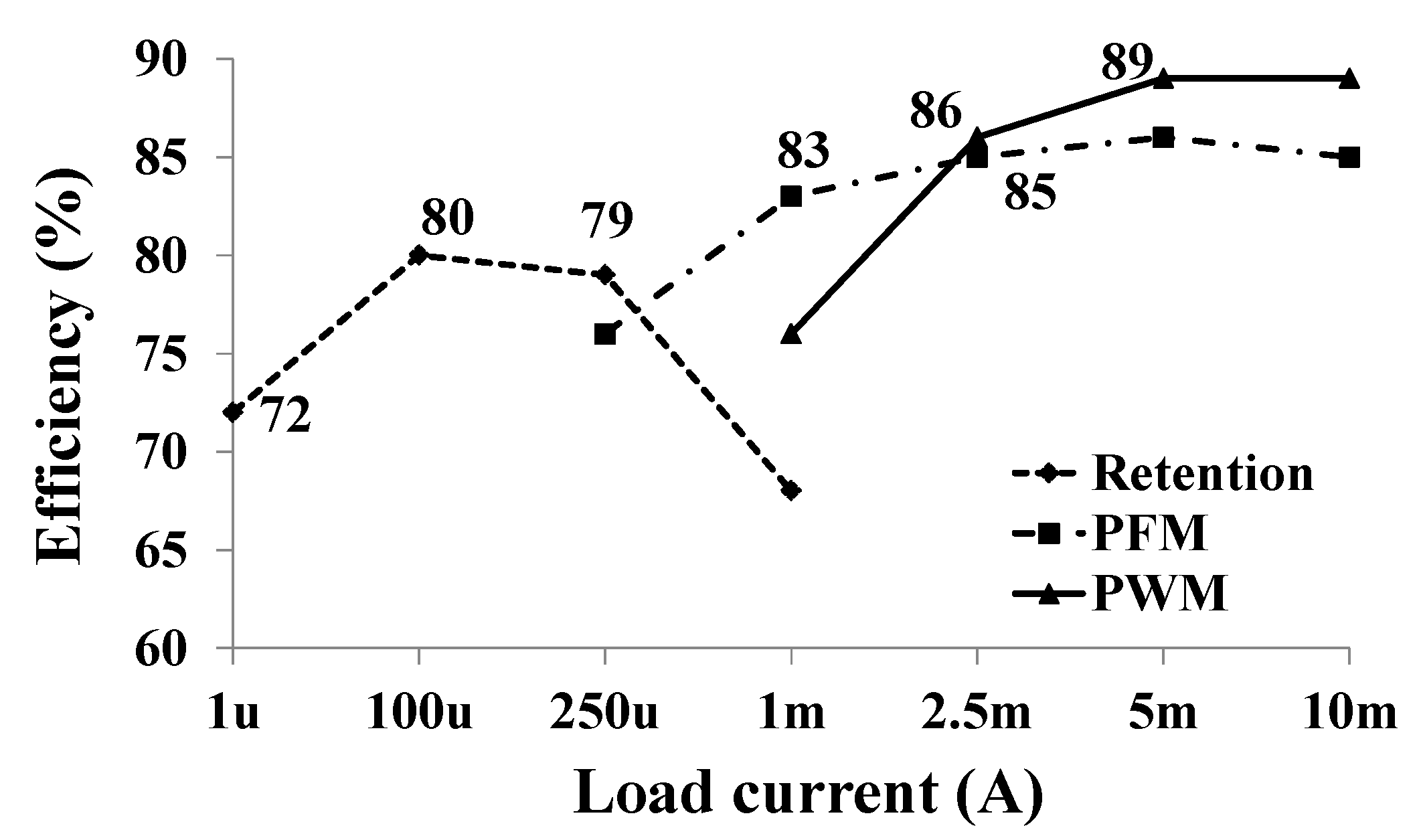
19]. The PWM mode and PFM mode is operated under the load of over 2.5 mA and the load of between 0.5 mA and 2.5 mA, respectively. The retention mode is enabled to improve the efficiency when the low load current is below 0.5 mA.
The DC-DC buck converter generates the output voltage of 1.2 V from the supply voltage of 1.5 V to 3.6 V. The operation is defined by the connection of the external 1 μH inductor (L
1) and the 1 μF capacitor (C
1). To obtain high conversion efficiency in a discontinuous conduction mode (DCM), the SC-NCD adjusting the NMOS switch (M
N) off-time is proposed. By controlling M
N off-time, both diode conduction losses in power MOSFET are minimized effectively. The 1.2 V output of the DC-DC Buck converter supplies a BGR and four on-chip LDOs composed of three low-noise LDO with a capacitor and a capacitor-less LDO, each making a 1 V core supply voltage for the different blocks of the transceiver [
20].
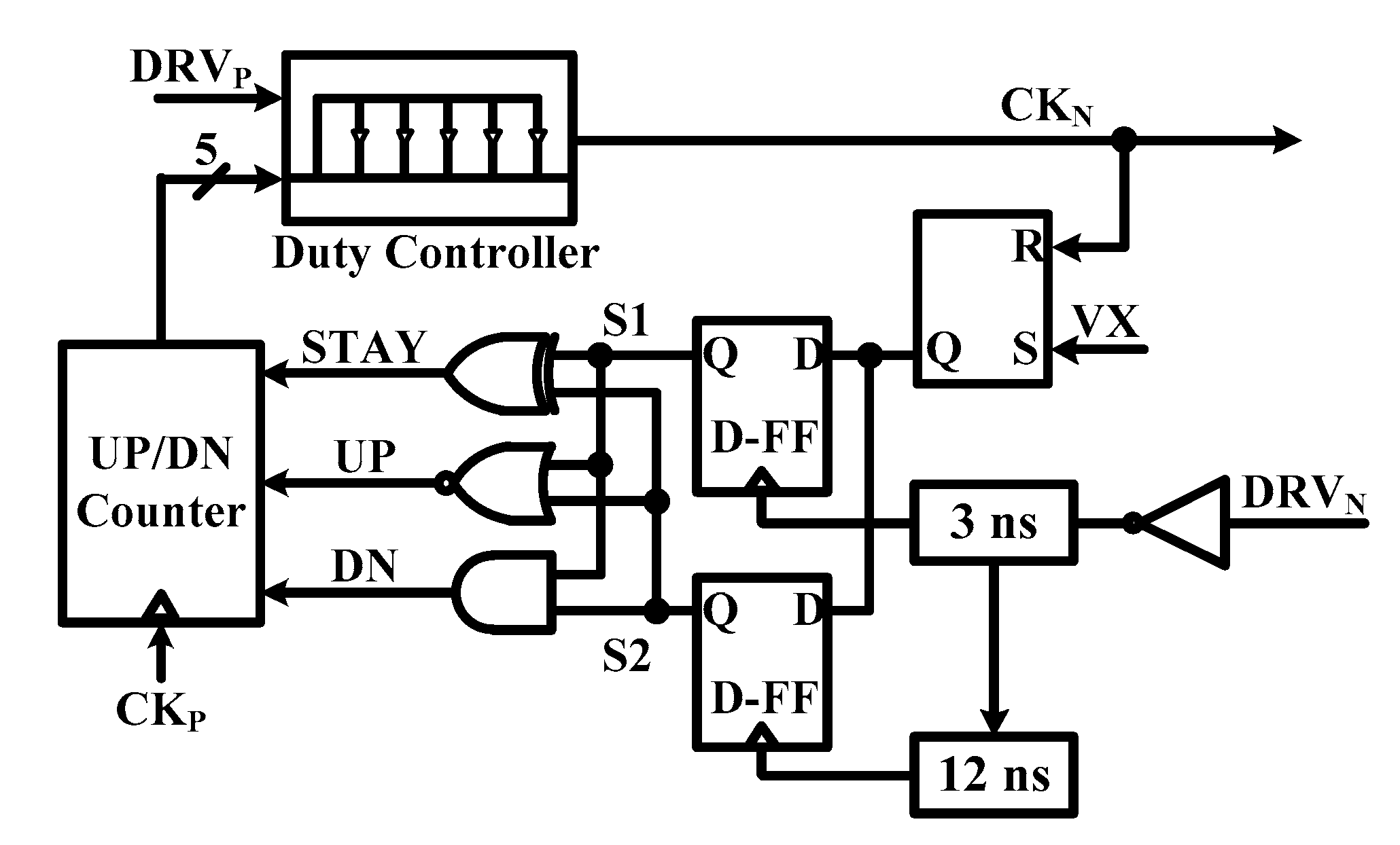
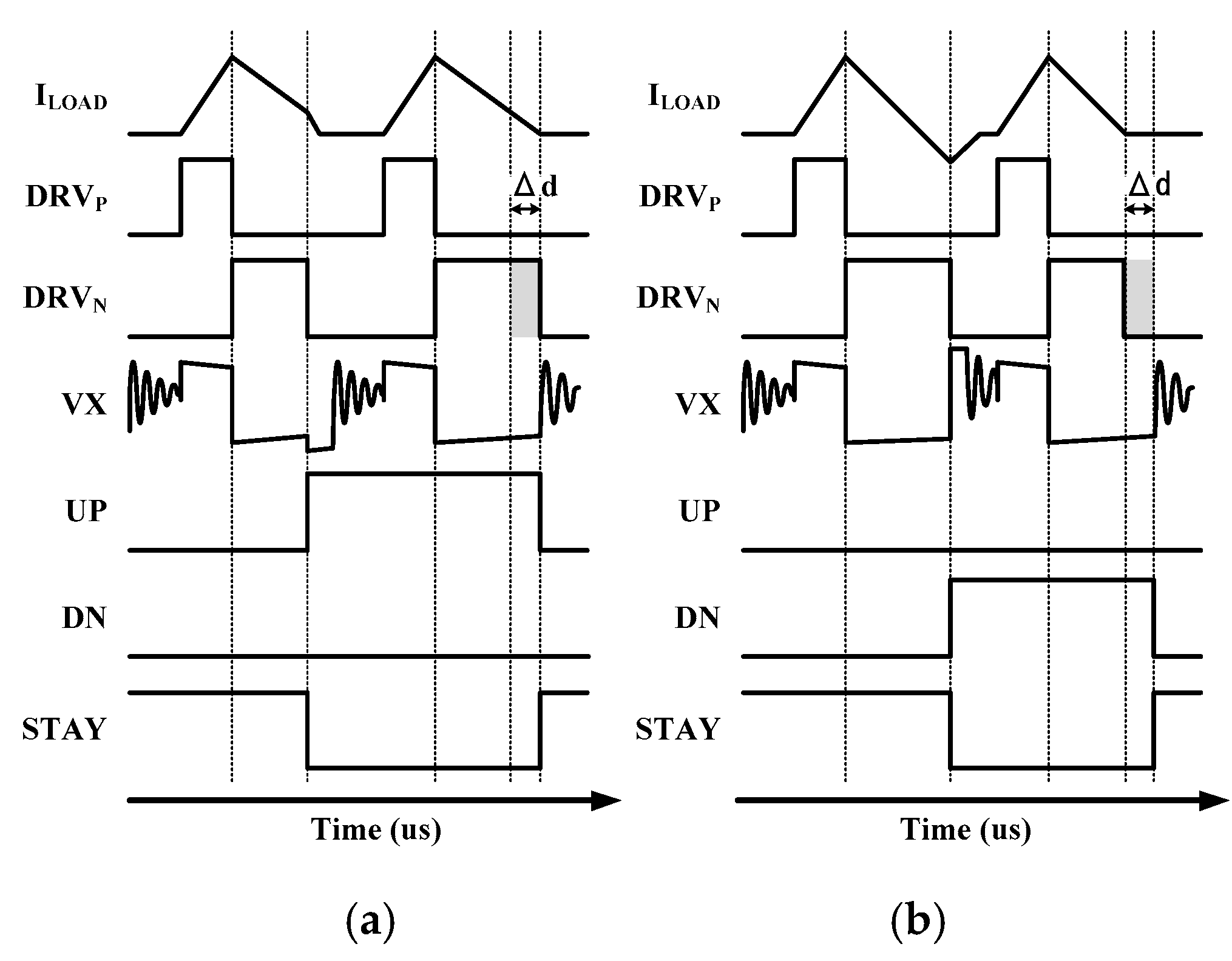
Figure 16 shows the block diagram of the proposed SC-NCD. It is a fully digital controller composed of UP/DN counter, duty controller, and D-FF. It is smaller than current consumption of conventional NCD. The proposed SC-NCD method does not use the comparator when it detects the point that the inductor current is 0 A. Therefore, the SC-NCD can improve efficiency by reducing control loss account for a large proportion of the DCM dc-dc converter in light load current conditions using the NCD for digital methods, and it is possible to prevent efficiency reduction due to NCD timing errors caused by the analog comparator offset.
Figure 17a,b show timing diagram of operation of NCD. VX signal is sampled to digital bits by D-FF. The M
N is turned off after 3 ns and 12 ns. The sampled bits, S1 and S2, feeds to logic including XOR, NOR, and the AND gate and output signal of that is feed to UP/DN counter to control M
N off-time digitally. In the case where DRV
N is under-duty, sampled bits, S1 and S2, are all high and converting the UP signal zero to high. If the DRVN signal is over duty, sampled bits are all-zero and converting the DN signal zero to high. Lastly, the STAY signal is set to high and duty of CK
N is locked.
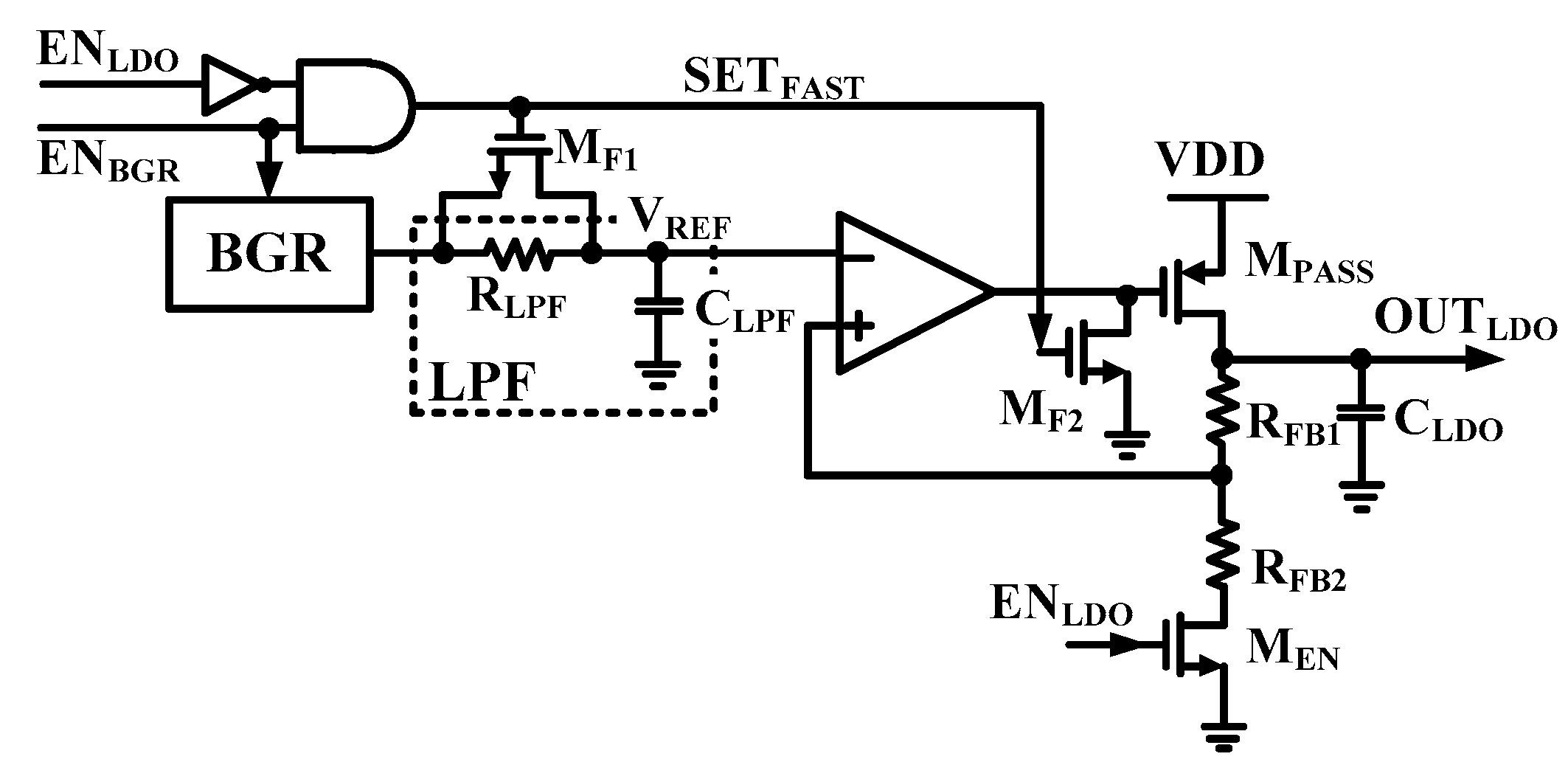
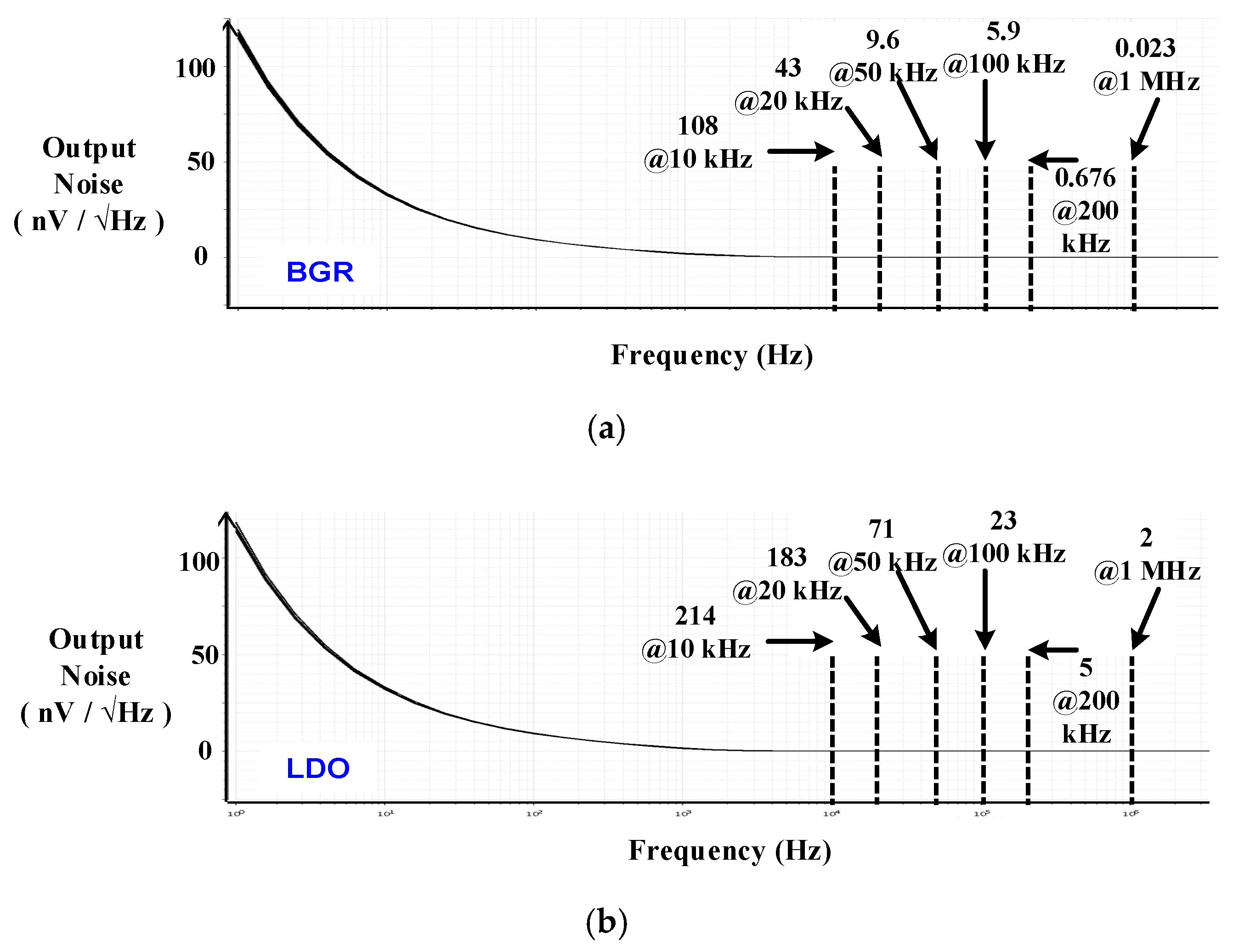
Figure 18 shows block diagram of low noise LDO with a fast settling technique (FST). The low noise LDO helps minimize the VCO phase noise and reduce the impact of VCO pushing [
21]. It is composed of LPF, a BGR, an LDO, and an NMOS for FST. The LPF is used to reduce output noise of BGR. The FST is composed to compensate settling time, which slowed using LPF of BGR. When EN
LDO is low in an initial state, the FST is enabled. The M
F1 and M
F2 are turned on by SET
FAST. Therefore, the R
LPF is shorted to achieve fast settling of V
REF. The LDO output capacitor (C
LDO) is initially charged by using the bypass mode of LDO during fast settling time.
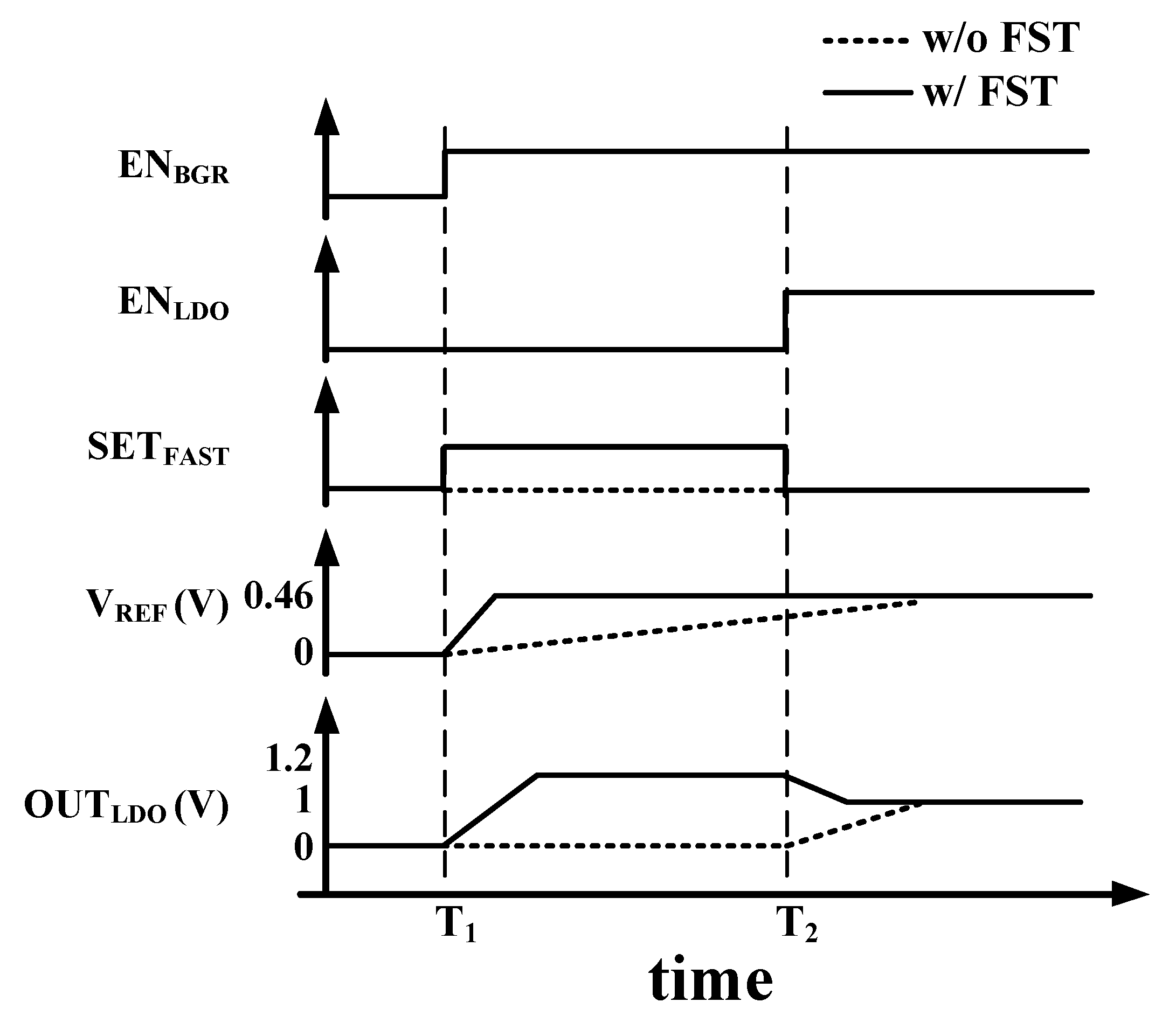
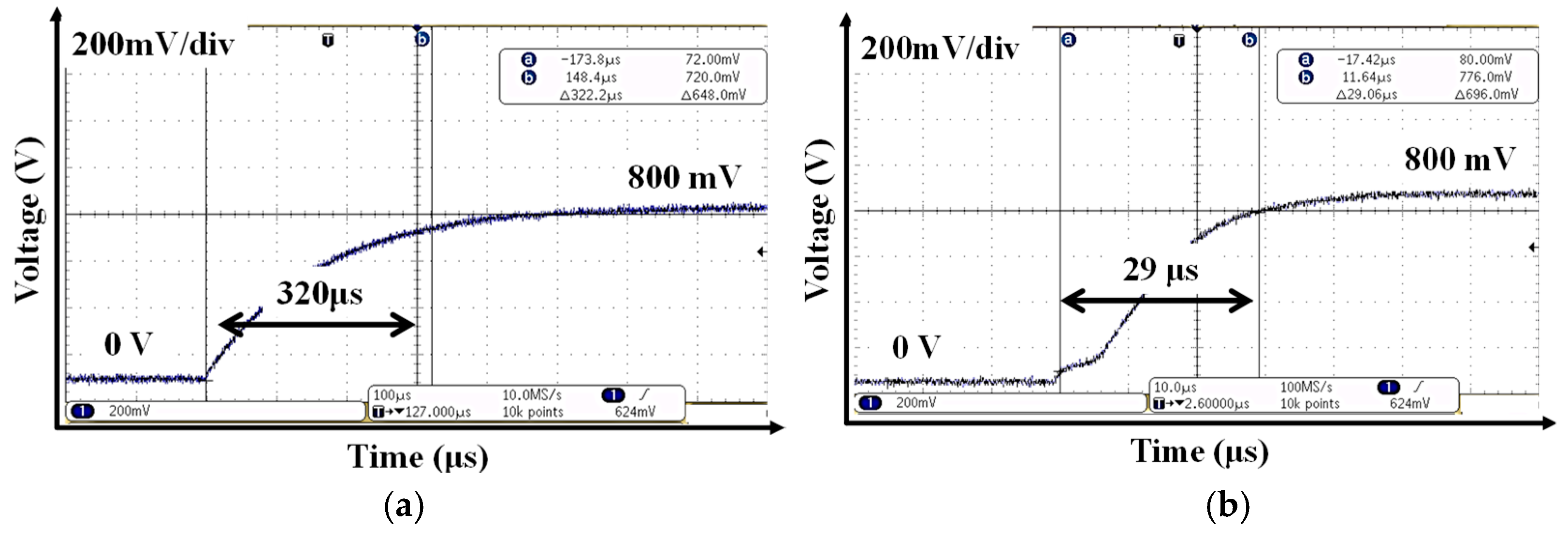
Figure 19 shows timing diagram of FST. When the BGR is enabled at T
1, the R
LPF is bypassed by turning on switching MOSFET (M
F). Therefore, the reference voltage of the LDO is applied without delay and C
LDO is charged in the bypass mode. It can be rapidly settled. When the LDO is enabled at T
2, output voltage of BGR is applied to the LDO through the LPF by turning off M
F, and noise of LDO is reduced. Output voltage of the LDO is changed to 1 V from VDD (1.2 V).

 ,
, 


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}