Design and Implementation of an Ultra-Low Resource Electrodermal Activity Sensor for Wearable Applications ‡



Abstract
:1. Introduction
- An optimized embedded EDA compression algorithm for 16-bit MCU architectures that improves upon the initial work from Pope and Halter [9].
- A compression performance comparison of this low-resource EDA compression method to a recent compressive sensing (CS) method from Chaspari et al. [10].
- Quantification of the compression distortion on common tonic and phasic EDA signal features frequently used in affective computing research.
- Demonstration of improved power performance of compressing and storing EDA signal within a single 16-bit microcontroller as compared to methods requiring external memory.
1.1. Electrodermal Activity
1.2. Wavelet Transformations
Data Compression
2. Materials and Methods
2.1. System Description
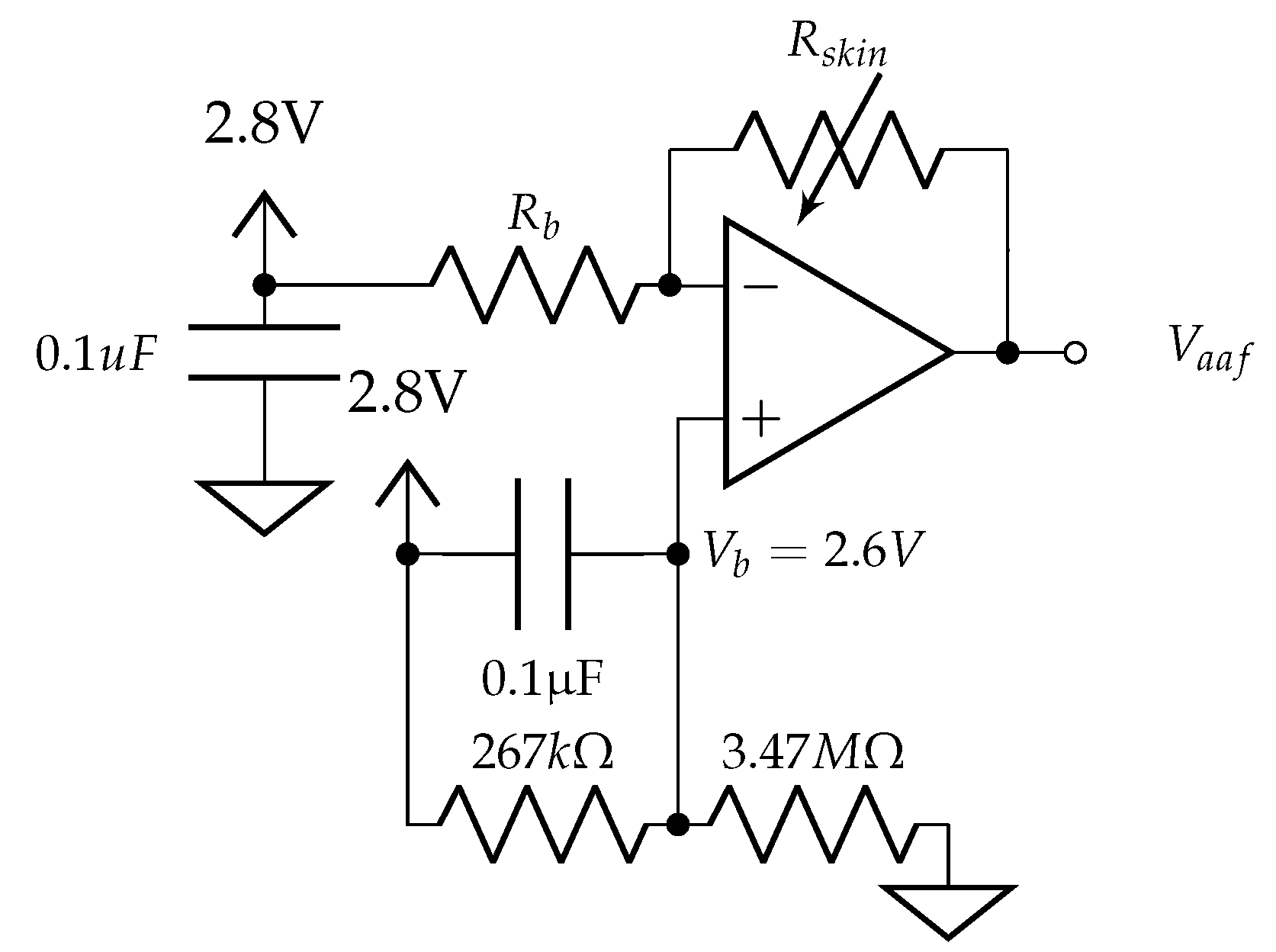
2.2. Analog Front End
2.3. Microcontroller
2.4. On-Chip Signal Compression
2.4.1. Wavelet Transformation of EDA Signal
| Algorithm 1 ML-DWT Algorithm |
|
2.4.2. Sorting Wavelet Coefficients
| Algorithm 2 ML-DWT Compression |
|
2.4.3. Encoding Wavelet Coefficients
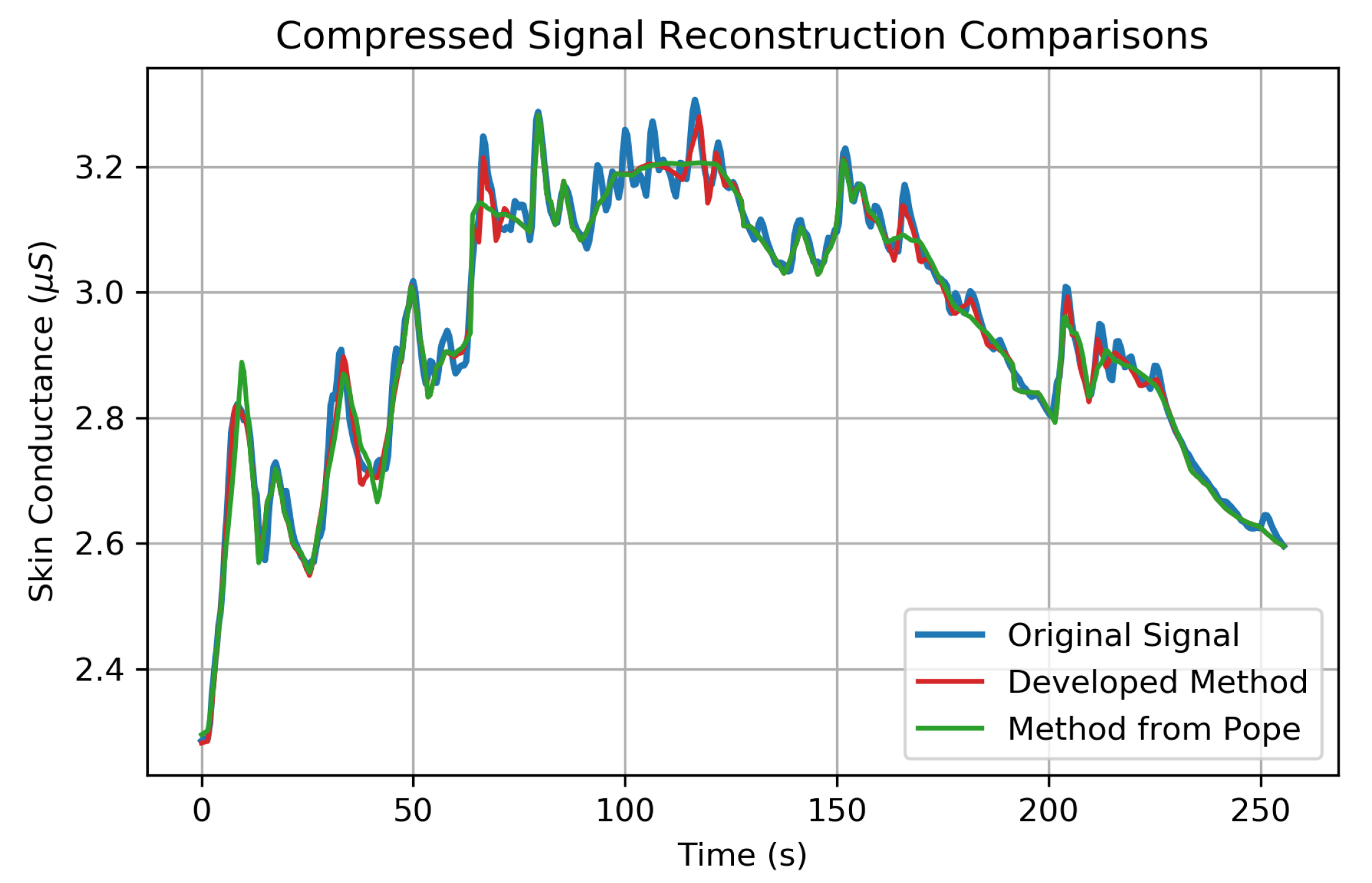
2.5. Reconstruction
2.6. Evaluation and Performance Metrics
2.6.1. Compression Ratio
2.6.2. Compression Distortion
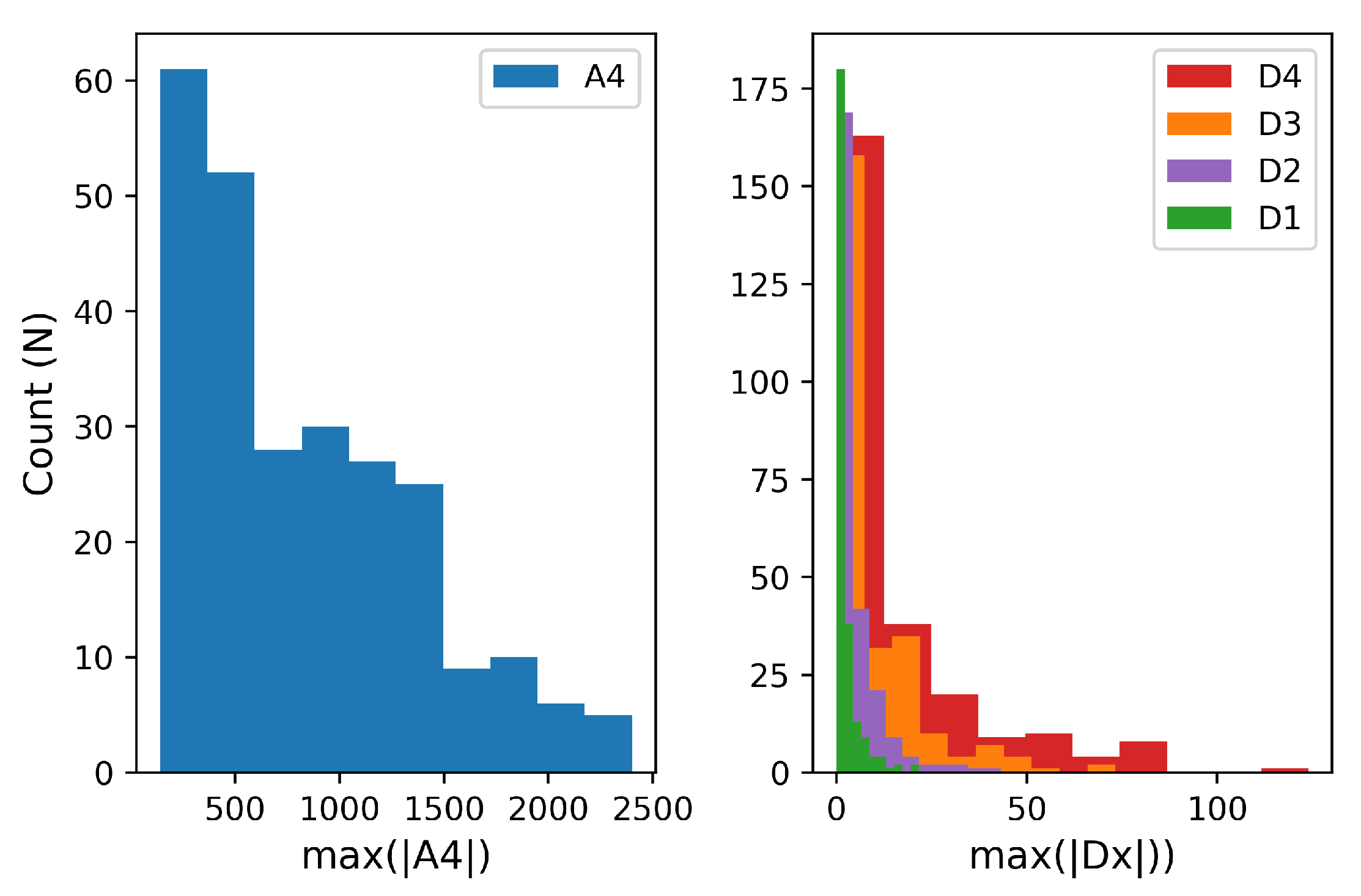
2.6.3. Energy Compaction
2.6.4. EDA Feature Reconstruction Errors
3. Results
3.1. Compression Performance
3.2. EDA Feature Performance
3.3. Sensor Performance
3.4. EDA Recording Experience
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. EDA Sensor Circuitry

Appendix B. Analog Low Pass Filter Design

References
- Liu, X.; Vega, K.; Maes, P.; Paradiso, J.A. Wearability factors for skin interfaces. In Proceedings of the 7th Augmented Human International Conference, Geneva, Switzerland, 25–27 February 2016; p. 21. [Google Scholar]
- Borgeson, J.; Schauer, S.; Diewald, H. Benchmarking MCU Power Consumption for Ultra-Low-Power Applications; White Paper; Texas Instruments: Dallas, TX, USA, 2012. [Google Scholar]
- Huang, J.; Badam, A.; Chandra, R.; Nightingale, E.B. WearDrive: Fast and Energy-Efficient Storage for Wearables. In Proceedings of the USENIX Annual Technical Conference (USENIC ATC ’15), Santa Clara, CA, USA, 8–10 July 2015; pp. 613–625. [Google Scholar]
- Poon, C.C.; Lo, B.P.; Yuce, M.R.; Alomainy, A.; Hao, Y. Body sensor networks: In the era of big data and beyond. IEEE Rev. Biomed. Eng. 2015, 8, 4–16. [Google Scholar] [CrossRef]
- Imtiaz, S.A.; Casson, A.J.; Rodriguez-Villegas, E. Compression in Wearable Sensor Nodes: Impacts of Node Topology. IEEE Trans. Biomed. Eng. 2014, 61, 1080–1090. [Google Scholar] [CrossRef]
- Yazicioglu, R.F.; Kim, S.; Torfs, T.; Kim, H.; Hoof, C.V. A 30 mu W Analog Signal Processor ASIC for Portable Biopotential Signal Monitoring. IEEE J. Solid State Circuits 2011, 46, 209–223. [Google Scholar] [CrossRef]
- Casson, A.J. Opportunities and challenges for ultra low power signal processing in wearable healthcare. In Proceedings of the 2015 23rd European Signal Processing Conference (EUSIPCO), Nice, France, 31 August–4 September 2015; pp. 424–428. [Google Scholar] [CrossRef]
- Deepu, C.J.; Heng, C.H.; Lian, Y. A Hybrid Data Compression Scheme for Power Reduction in Wireless Sensors for IoT. IEEE Trans. Biomed. Circuits Syst. 2017, 11, 245–254. [Google Scholar] [CrossRef]
- Pope, G.; Mishra, V.; Lewia, S.; Lowens, B.; Kotz, D.; Lord, S.; Halter, R. An ultra-low resource wearable EDA sensor using wavelet compression. In Proceedings of the 2018 IEEE 15th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Las Vegas, NV, USA, 4–7 March 2018; pp. 193–196. [Google Scholar] [CrossRef]
- Chaspari, T.; Tsiartas, A.; Stein, L.I.; Cermak, S.A.; Narayanan, S.S. Sparse representation of electrodermal activity with knowledge-driven dictionaries. IEEE Trans. Biomed. Eng. 2015, 62, 960–971. [Google Scholar] [CrossRef]
- Cacioppo, J.T.; Tassinary, L.G.; Berntson, G. Handbook of Psychophysiology, 3rd ed.; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Healey, J.A. Wearable and Automotive Systems for Affect Recognition from Physiology. Ph.D. Thesis, Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology, Cambridge, MA, USA, 2000. [Google Scholar]
- Martínez-Rodrigo, A.; Fernández-Caballero, A.; Silva, F.; Novais, P. Monitoring Electrodermal Activity for Stress Recognition Using a Wearable. In Proceedings of the Intelligent Environments (Workshops), London, UK, 12–13 September 2016; pp. 416–425. [Google Scholar]
- Naveteur, J.; Baque, E.F.I. Individual differences in electrodermal activity as a function of subjects’ anxiety. Personal. Individ. Differ. 1987, 8, 615–626. [Google Scholar] [CrossRef]
- Roth, W.T.; Dawson, M.E.; Filion, D.L. Publication recommendations for electrodermal measurements. Psychophysiology 2012, 49, 1017–1034. [Google Scholar]
- Boucsein, W. Electrodermal Activity; Springer Science & Business Media: Boston, MA, USA, 2012. [Google Scholar]
- Nagai, Y.; Jones, C.I.; Sen, A. Galvanic Skin Response (GSR)/Electrodermal/Skin Conductance Biofeedback on Epilepsy: A systematic review and meta-analysis. Front. Neurol. 2019, 10, 377. [Google Scholar] [CrossRef] [PubMed]
- Jaques, N.; Taylor, S.; Azaria, A.; Ghandeharioun, A.; Sano, A.; Picard, R. Predicting students’ happiness from physiology, phone, mobility, and behavioral data. In Proceedings of the 2015 International Conference on Affective Computing and Intelligent Interaction (ACII 2015), Xi’an, China, 21–24 September2015. [Google Scholar] [CrossRef]
- Jang, E.H.; Park, B.J.; Park, M.S.; Kim, S.H.; Sohn, J.H. Analysis of physiological signals for recognition of boredom, pain, and surprise emotions. Phyiol. Anthrop. 2015. [Google Scholar] [CrossRef]
- Kreyden, O.P.; Scheidegger, E.P. Anatomy of the sweat glands, pharmacology of botulinum toxin, and distinctive syndromes associated with hyperhidrosis. Clin. Dermatol. 2004, 22, 40–44. [Google Scholar] [CrossRef]
- van Dooren, M.; de Vries, J.J.G.G.J.; Janssen, J.H. Emotional sweating across the body: Comparing 16 different skin conductance measurement locations. Physiol. Behav. 2012, 106, 298–304. [Google Scholar] [CrossRef] [PubMed]
- Addison, P. The Illustrated Wavelet Transform Handbook: Introductory Theory and Applications in Science, Engineering, Medicine and Finance; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Hansen, E.W. Fourier Transforms: Principles and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Majumder, S.; Mondal, T.; Deen, M.J. Wearable sensors for remote health monitoring. Sensors 2017, 17, 130. [Google Scholar] [CrossRef]
- Stojanović, R.; Knežević, S.; Karadaglić, D.; Devedžić, G. Optimization and implementation of the wavelet based algorithms for embedded biomedical signal processing. Comput. Sci. Inf. Syst. 2013, 10, 503–523. [Google Scholar] [CrossRef]
- Chang, C.T.; Nien, C.M.; Rieger, R. Microcontroller implementation of low-power compression for wearable biosignal transmitter. In Proceedings of the 2016 International Symposium on VLSI Design, Automation and Test (VLSI-DAT), Hsinchu, Taiwan, 25–27 April 2016; pp. 1–4. [Google Scholar]
- Rein, S.; Reisslein, M. Low-memory wavelet transforms for wireless sensor networks: A tutorial. IEEE Commun. Surv. Tutor. 2011, 13, 291–307. [Google Scholar] [CrossRef]
- Sundararajan, D. Discrete Wavelet Transform: A Signal Processing Approach; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Daubechies, I. Orthonormal bases of compactly supported wavelets. Commun. Pure Appl. Math. 1988, 41, 909–996. [Google Scholar] [CrossRef] [Green Version]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Zordan, D.; Martinez, B.; Vilajosana, I.; Rossi, M. On the Performance of Lossy Compression Schemes for Energy Constrained Sensor Networking. ACM Trans. Sens. Netw. 2014, 11, 1–34. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Chen, F.; Chandrakasan, A.P.; Stojanoviæ, V.M. Design and analysis of a hardware-efficient compressed sensing architecture for data compression in wireless sensors. IEEE J. Solid State Circuits 2012, 47, 744–756. [Google Scholar] [CrossRef]
- Lim, C.L.; Rennie, C.; Barry, R.J.; Bahramali, H.; Lazzaro, I.; Manor, B.; Gordon, E. Decomposing skin conductance into tonic and phasic components. Int. J. Psychophysiol. 1997, 25, 97–109. [Google Scholar] [CrossRef]
- Alexander, D.M.; Trengove, C.; Johnston, P.; Cooper, T.; August, J.P.; Gordon, E. Separating individual skin conductance responses in a short interstimulus-interval paradigm. J. Neurosci. Methods 2005, 146, 116–123. [Google Scholar] [CrossRef]
- Friston, K.J.; Kuelzow, N.; Daunizeau, J.; Dolan, R.J.; Bach, D.R. Dynamic causal modeling of spontaneous fluctuations in skin conductance. Psychophysiology 2010, 48, 252–257. [Google Scholar] [CrossRef]
- Swangnetr, M.; Kaber, D.B. Emotional State Classification in Patient–Robot Interaction Using Wavelet Analysis and Statistics-Based Feature Selection. IEEE Trans. Hum. Mach. Syst. 2013, 43. [Google Scholar] [CrossRef]
- Greco, A.; Valenza, G.; Scilingo, E.P. Advances in Electrodermal Activity Processing with Applications for Mental Health: From Heuristic Methods to Convex Optimization; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Quiring, K. MSP430 Software Coding Techniques; Technical Report SLAA294A; Texas Instruments: Dallas, TX, USA, 2006. [Google Scholar]
- Prusa, Z. Segmentwise Discrete Wavelet Transform. Ph.D. Thesis, Brno University of Technology, Brno, Czech Republic, 2012. [Google Scholar]
- Linden, W. What do arithmetic stress tests measure? Protocol variations and cardiovascular responses. Psychophysiology 1991, 28, 91–102. [Google Scholar] [CrossRef]
- Poh, M.Z.; Swenson, N.C.; Picard, R.W. A wearable sensor for unobtrusive, long-term assessment of electrodermal activity. IEEE Trans. Biomed. Eng. 2010, 57, 1243–1252. [Google Scholar]
- Sun, F.T.; Kuo, C.; Cheng, H.T.; Buthpitiya, S.; Collins, P.; Griss, M. Activity-aware mental stress detection using physiological sensors. In Proceedings of the International Conference on Mobile Computing, Applications, and Services, Santa Clara, CA, USA, 25–28 October 2010; pp. 211–230. [Google Scholar]
- Plarre, K.; Raij, A.; Hossain, S.M.; Ali, A.A.; Nakajima, M.; Al’absi, M.; Ertin, E.; Kamarck, T.; Kumar, S.; Scott, M.; et al. Continuous inference of psychological stress from sensory measurements collected in the natural environment. In Proceedings of the 2011 10th International Conference on Information Processing in Sensor Networks (IPSN), Chicago, IL, USA, 12–14 April 2011; pp. 97–108. [Google Scholar]
- Khanam, R.; Ahmad, S.N. Selection of Wavelets for Evaluating SNR, PRD and CR of ECG Signal. Int. J. Eng. Sci. Innov. Technol 2013, 2, 112–119. [Google Scholar]
- Rajoub, B.A. An efficient coding algorithm for the compression of ECG signals using the wavelet transform. IEEE Trans. Biomed. Eng. 2002, 49, 355–362. [Google Scholar] [CrossRef]
- Taylor, S.; Jaques, N.; Chen, W.; Fedor, S.; Sano, A.; Picard, R. Automatic identification of artifacts in electrodermal activity data. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 1934–1937. [Google Scholar]
- Moodmetric Website. Available online: https://www.moodmetric.com/research/ (accessed on 21 May 2019).
- Lou, H.; Luo, W.; Wang, L. Data compression based on compressed sensing and wavelet transform. In Proceedings of the 2010 3rd IEEE International Conference on Computer Science and Information Technology (ICCSIT 2010), Chengdu, China, 9–11 July 2010; Volume 8, pp. 537–542. [Google Scholar] [CrossRef]
- Garbarino, M.; Lai, M.; Bender, D.; Picard, R.W.; Tognetti, S. Empatica E3—A wearable wireless multi-sensor device for real-time computerized biofeedback and data acquisition. In Proceedings of the 2014 4th International Conference on Wireless Mobile Communication and Healthcare-Transforming Healthcare Through Innovations in Mobile and Wireless Technologies (MOBIHEALTH), Athens, Greece, 3–5 November 2014; pp. 39–42. [Google Scholar] [CrossRef]
- Pabst, O.; Martinsen, Ø.G.; Chua, L. The nonlinear electrical properties of human skin make it a generic memristor. Sci. Rep. 2018, 8, 1–9. [Google Scholar] [CrossRef]
- Yamamoto, T.; Yamamoto, Y. Non-linear electrical properties of skin in the low frequency range. Med Biol. Eng. Comput. 1981, 19, 302–310. [Google Scholar] [CrossRef]
- Pabst, O.; Tronstad, C.; Grimnes, S.; Fowles, D.; Martinsen, Ø.G. Comparison between the AC and DC measurement of electrodermal activity. Psychophysiology 2017, 54, 374–385. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bit | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| ... | ... | ||||||||||||||
| : | : | : | |||||||||||||
| WT Level | Max Value | Max Base 2 | Bits Required | Sign Bit? | Bitwidth Selected |
|---|---|---|---|---|---|
| 2399.53 | 11.2285 | 12 | No | 12 | |
| 123.881 | 6.95281 | 7 | Yes | 8 | |
| 73.2285 | 6.1943 | 7 | Yes | 8 | |
| 43.2475 | 5.43454 | 6 | Yes | 8 | |
| 21.7329 | 4.44181 | 5 | Yes | 8 | |
| 145 | 7.17991 | 8 | No | 8 |
| WT Vector | Mean %Energy | Std |
|---|---|---|
| 99.98% | 0.04453% | |
| 0.01125% | 0.02632% | |
| 0.006232% | 0.01582% | |
| 0.002031% | 0.006512% | |
| 0.0008842% | 0.004310% |
| Compression Ratio (CR) | Recording Duration (hours) |
|---|---|
| 0 | 0.60 |
| 4.20 | 2.52 |
| 8.80 | 5.28 |
| 14.20 | 8.52 |
| 17.10 | 10.26 |
| 19.70 | 11.82 |
| 23.30 | 13.98 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pope, G.C.; Halter, R.J. Design and Implementation of an Ultra-Low Resource Electrodermal Activity Sensor for Wearable Applications ‡. Sensors 2019, 19, 2450. https://doi.org/10.3390/s19112450
Pope GC, Halter RJ. Design and Implementation of an Ultra-Low Resource Electrodermal Activity Sensor for Wearable Applications ‡. Sensors. 2019; 19(11):2450. https://doi.org/10.3390/s19112450
Chicago/Turabian StylePope, Gunnar C., and Ryan J. Halter. 2019. "Design and Implementation of an Ultra-Low Resource Electrodermal Activity Sensor for Wearable Applications ‡" Sensors 19, no. 11: 2450. https://doi.org/10.3390/s19112450
APA StylePope, G. C., & Halter, R. J. (2019). Design and Implementation of an Ultra-Low Resource Electrodermal Activity Sensor for Wearable Applications ‡. Sensors, 19(11), 2450. https://doi.org/10.3390/s19112450