A Novel Autonomous Celestial Integrated Navigation for Deep Space Exploration Based on Angle and Stellar Spectra Shift Velocity Measurement


Abstract
:1. Introduction
2. Principle of Integrated Navigation
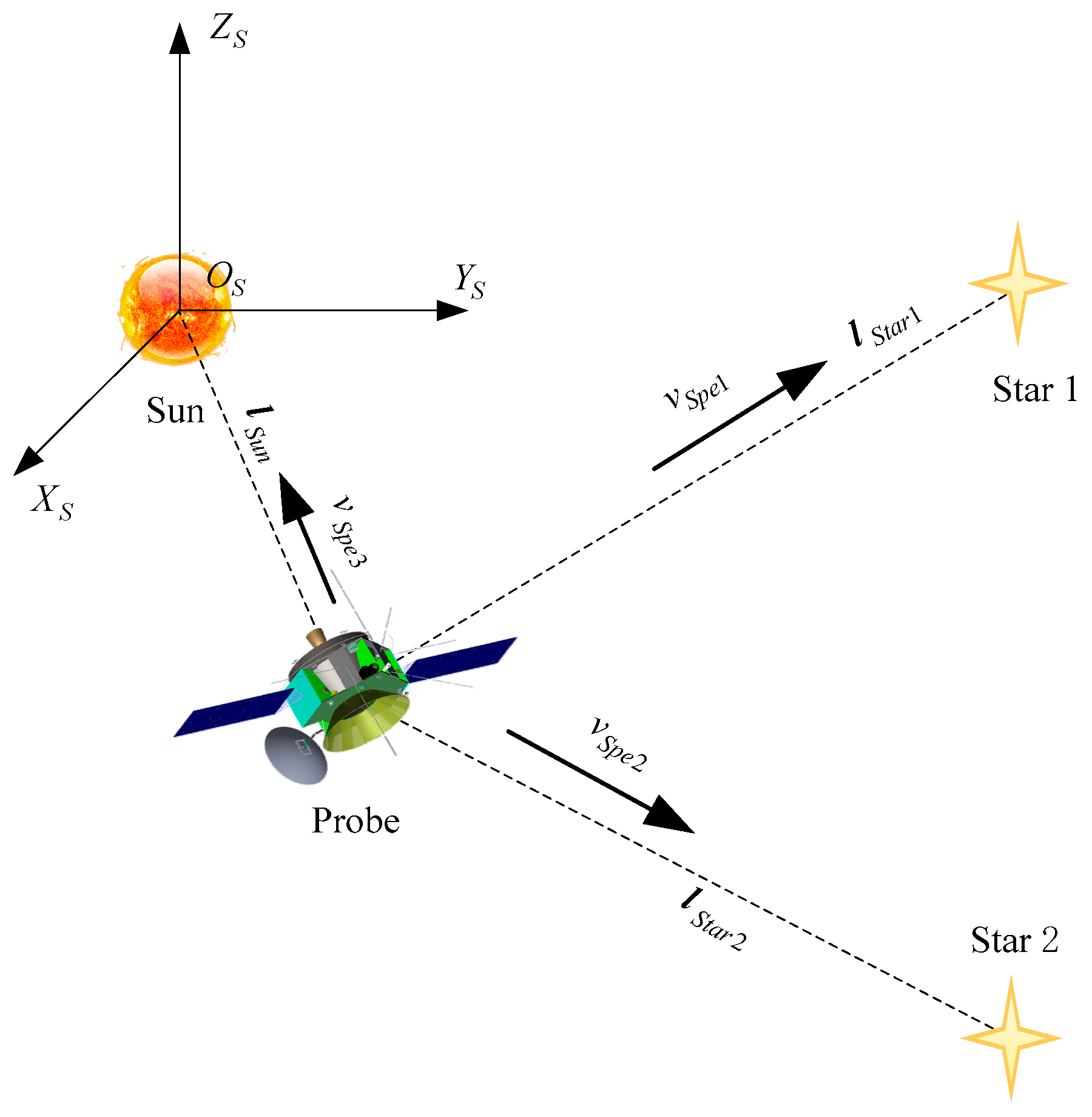
2.1. Velocity Measurement Scheme
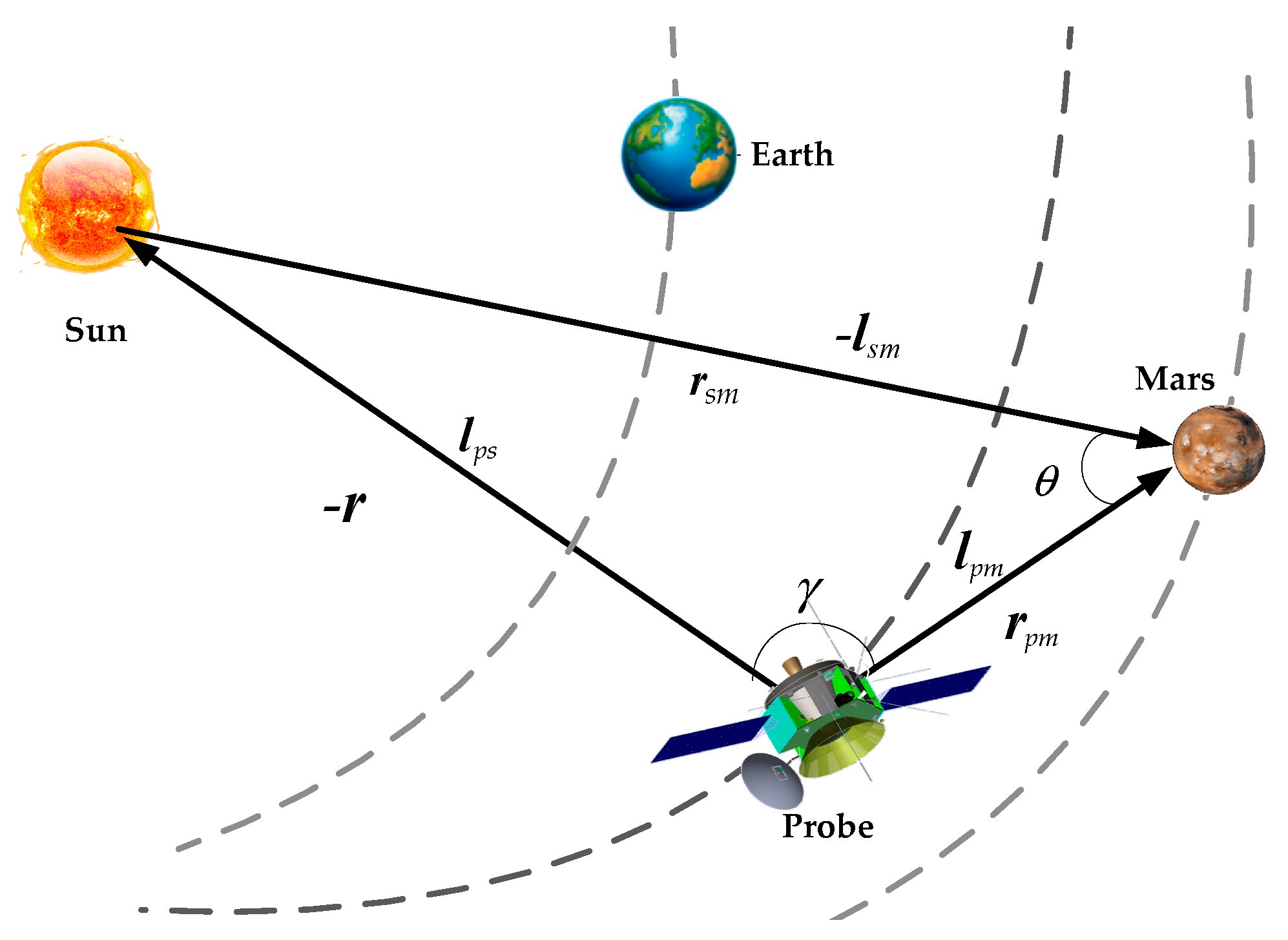
2.2. Angle Measurement Scheme
3. Integrated Navigation System Model
3.1. State Model
3.2. Measurement Model
4. Filtering Algorithm
5. Observability of Integrated Navigation System
6. Doppler Navigator and Hardware In-The-Loop Simulation System
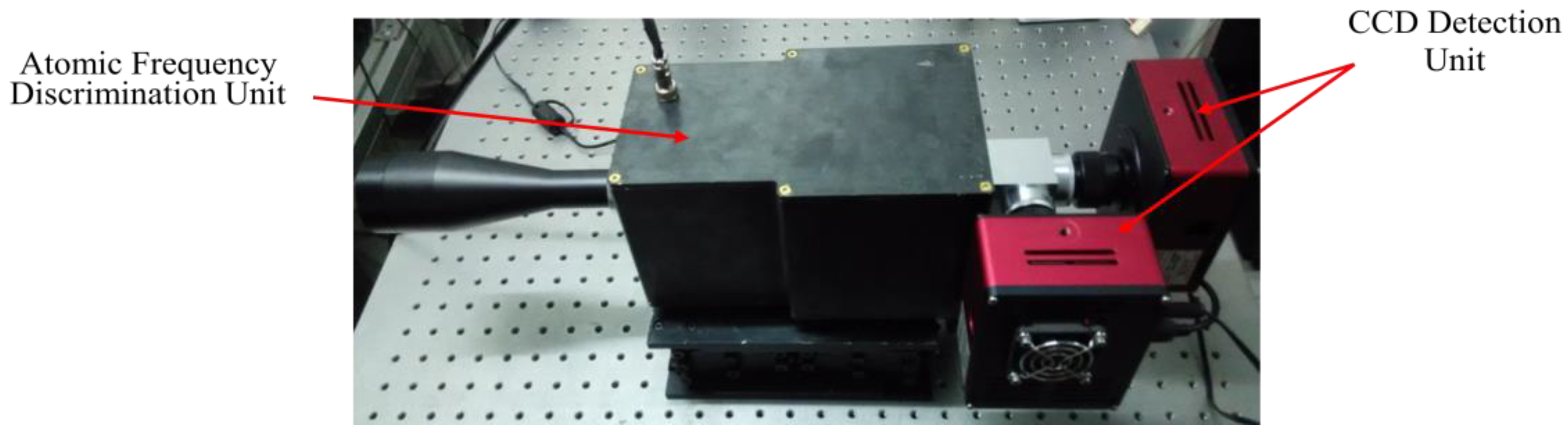
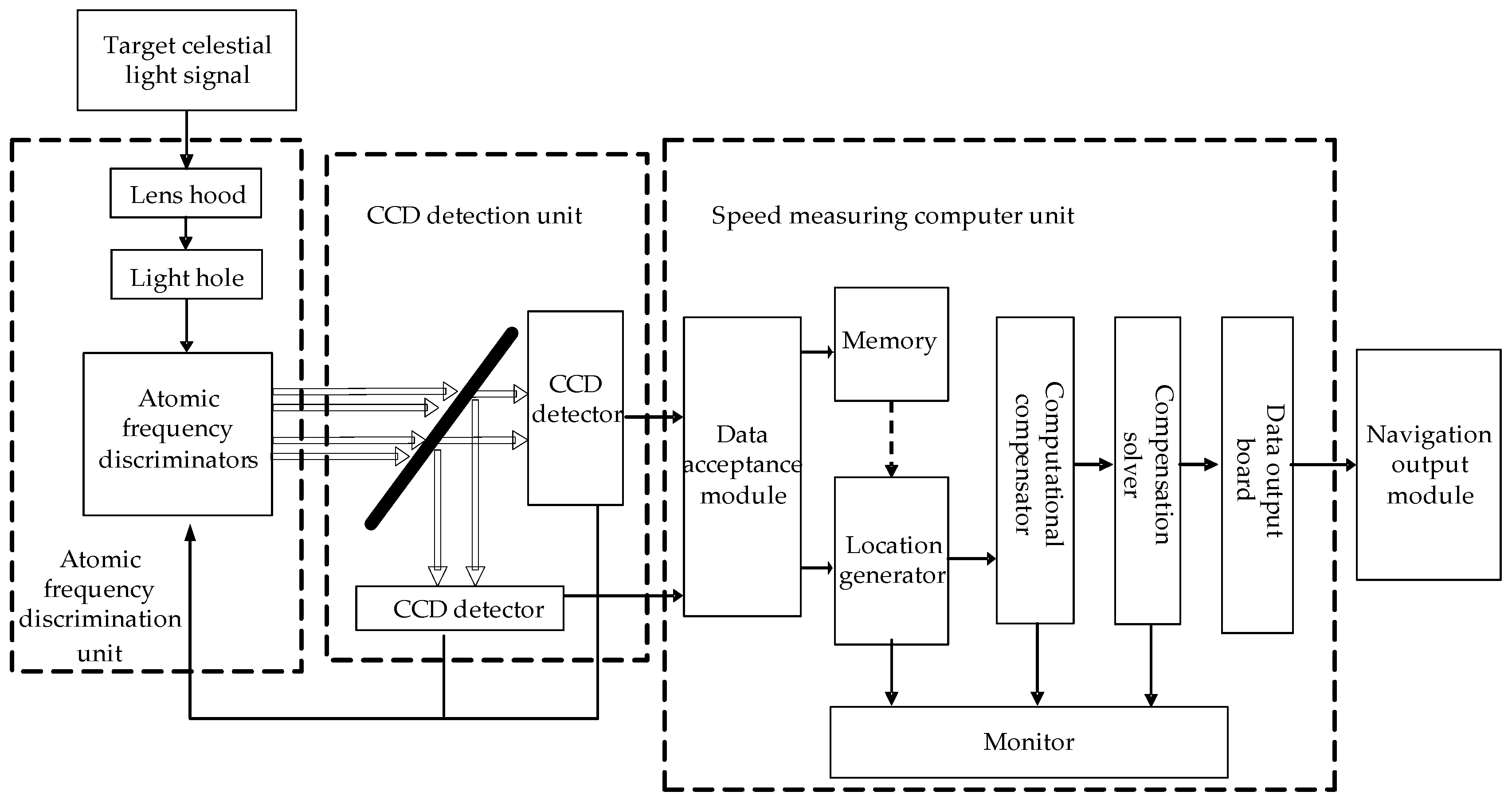
6.1. Design of Doppler Navigator Based On Atomic Frequency Discrimination
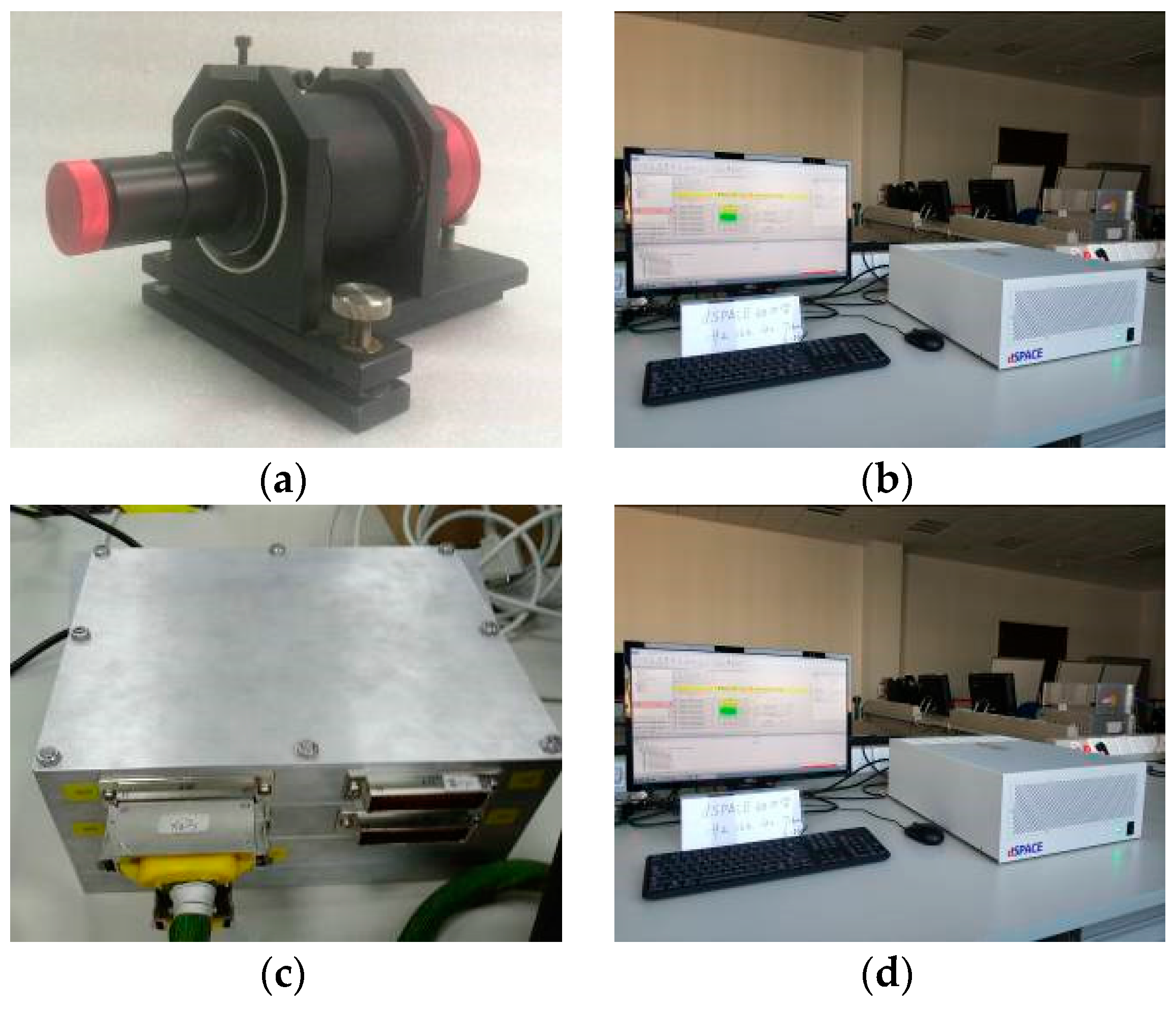
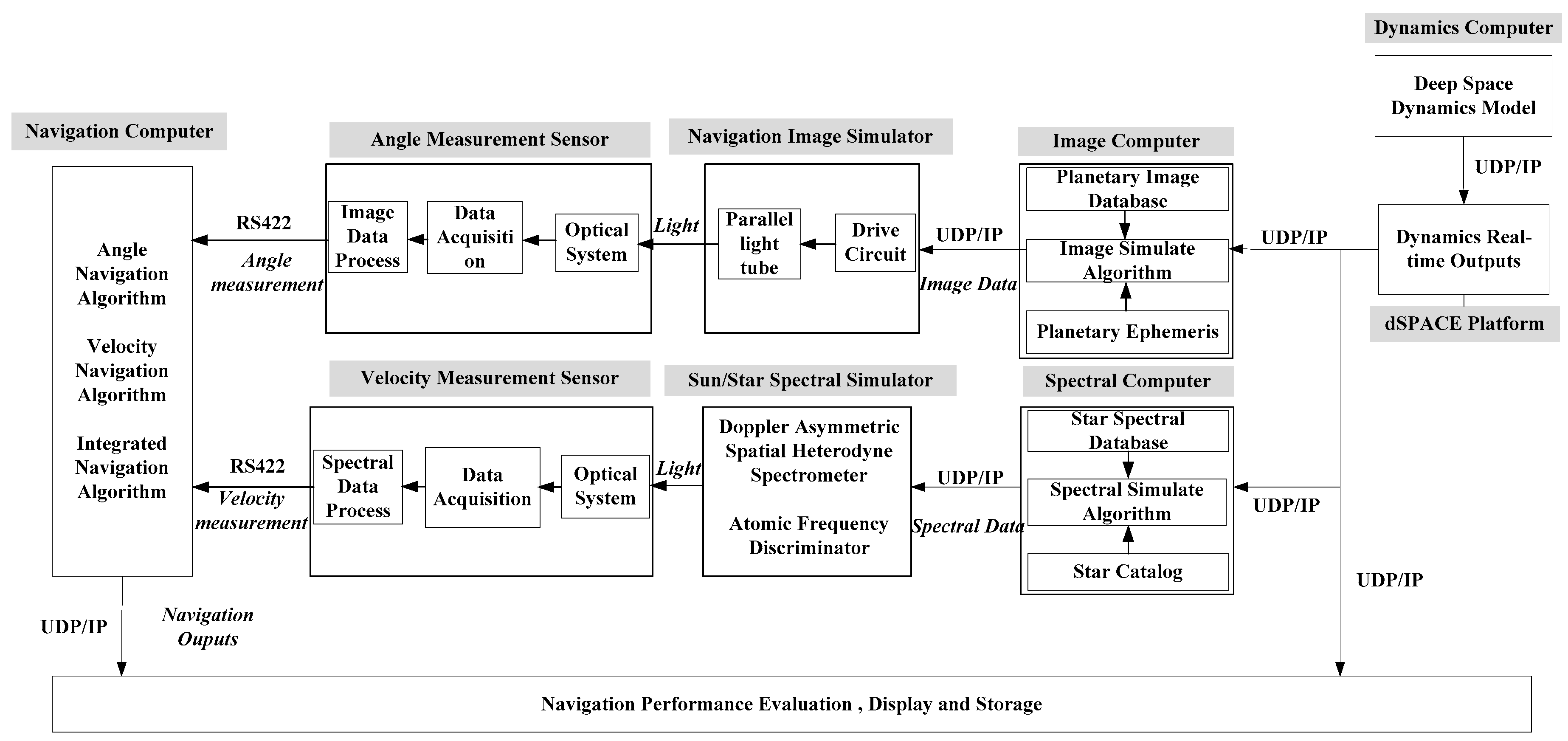
6.2. Design of Hardware In-The-Loop Simulation System
7. Simulation and Analysis
7.1. Observability Analysis
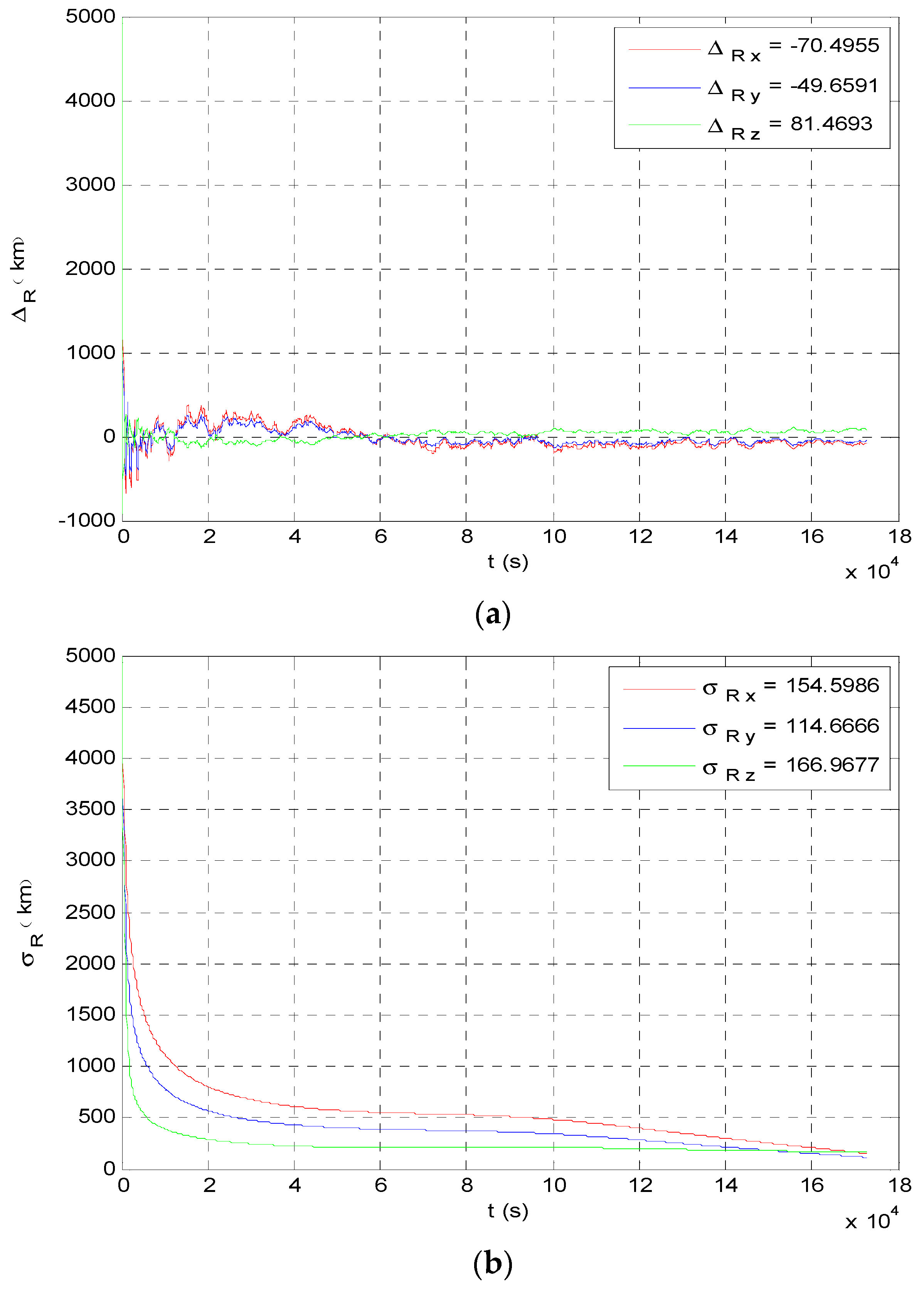
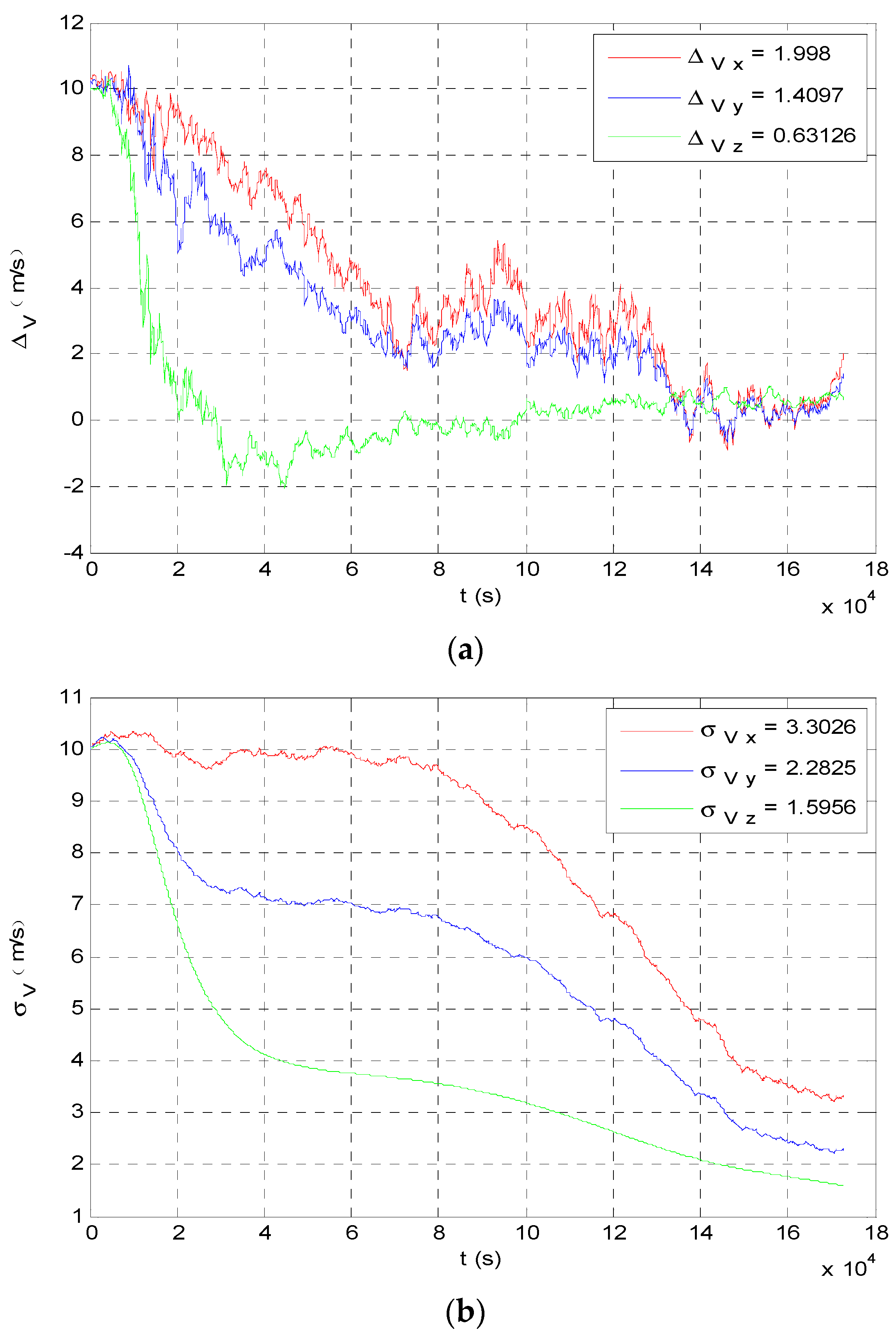
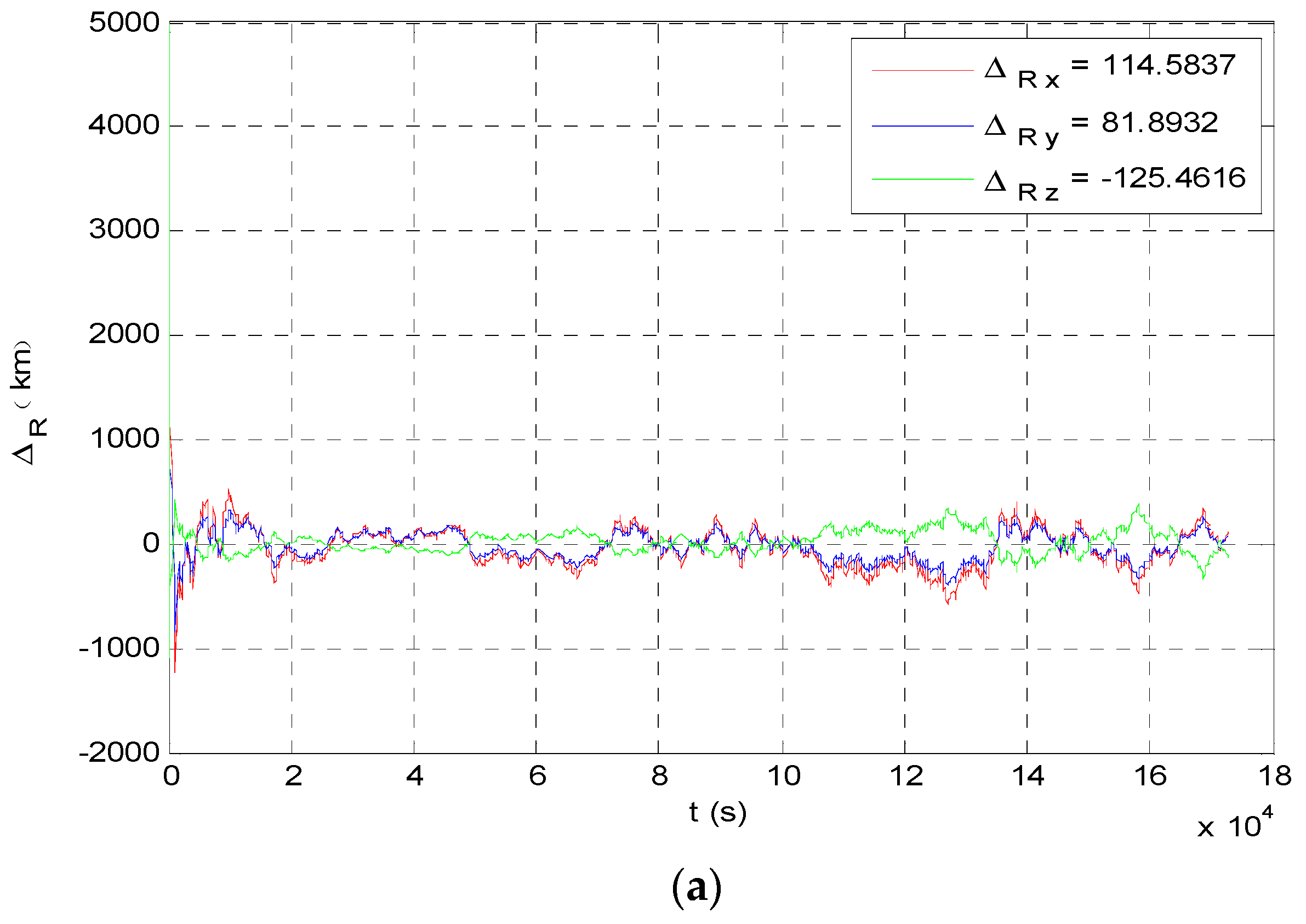
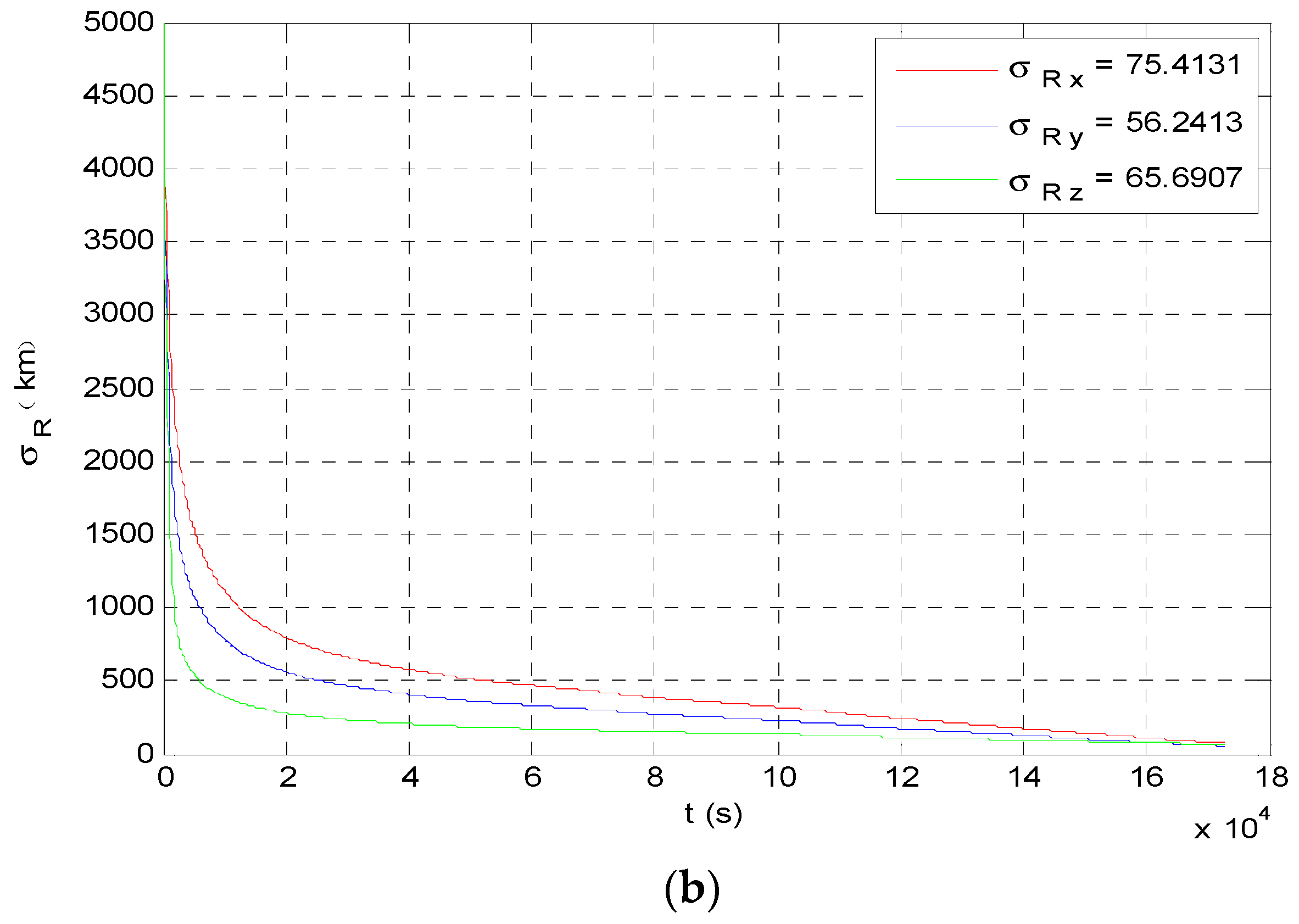
7.2. Accuracy Analysis of Intergrated Navigation
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fang, J.C.; Ning, X.L.; Liu, J. Principles and Methods of Spacecraft Celestial Navigation, 2nd ed.; National Defense Industry Press: Beijing, China, 2017; pp. 1–5. [Google Scholar]
- Zhang, S.; Dong, Y.T.; Ouyang, Y.C.; Yin, Z.; Peng, K.X. Adaptive Neural Control for Robotic Manipulators with Output Constraints and Uncertainties. IEEE Trans. Neutr. Netw. Learn. Syst. 2018, 29, 5554–5564. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Dong, Y.T. Adaptive Fuzzy Neural Network Control for a Constrained Robot Using Impedence Learning. IEEE Trans. Neutr. Netw. Learn. Syst. 2018, 29, 1174–1186. [Google Scholar] [CrossRef] [PubMed]
- Ning, X.L.; Fang, J.C. A new autonomous celestial navigation method for the lunar rover. Robot. Auton. Syst. 2009, 57, 48–54. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, X.; You, W.; Fang, B. New autonomous navigation method based on red shift. Aerosp. Shanghai 2013, 30, 32–33. [Google Scholar]
- Huang, Q.L.; Chen, X.; You, W. Error analysis of the autonomous celestial navigation based on the spectrum velocity measurement. In Proceedings of the 6th CSA/IAA Conference on Advanced Space Technology, Shanghai, China, 10–12 November 2015. [Google Scholar]
- Wang, W.; Fang, B.D.; Zhang, W. Deceleration options for a robotic interstellar spacecraft. In Proceedings of the 64th International Astronautical Congress, Beijing, China, 23–27 September 2013. [Google Scholar]
- Chen, X.; Zhang, W.; Wang, W. Preliminary Research of Mars Local Navigation Constellation. In Proceedings of the 64th International Astronautical Congress, Beijing, China, 23–27 September 2013. [Google Scholar]
- Ning, X.L.; Fang, J.C. An autonomous celestial navigation method for LEO satellite based on unscented Kalman filter and information fusion. Aerosp. Sci. Technol. 2007, 11, 222–228. [Google Scholar] [CrossRef]
- Wei, E.H.; Yang, H.Z.; Zhang, S.; Liu, J.N.; Yi, H. Modeling on autonomous navigation of Mars probe with pulsar and non real-time adjustment methods. J. Deep. Space Explor. 2014, 1, 298–302. [Google Scholar]
- Lightsey, E.G.; Mogensen, A.; Burkhar, P.D.; Ely, T.A.; Duncan, C. Real-Time Navigation for Mars Missions Using the Mars Network. J. Spacecr. Rockets 2008, 45, 519–533. [Google Scholar] [CrossRef]
- Chen, X.; Huang, Q.L. A novel celestial navigation method for Mars exploration during the interplanetary cruise. Chin. Soc. Opt. Eng. Conf. 2015, 250–256. [Google Scholar]
- Liu, J.; Fang, J.C.; Liu, G. Solar frequency shift–based radial velocity difference measurement for formation flight and its integrated navigation. J. Aerosp. Eng. 2017, 30, 04017049. [Google Scholar] [CrossRef]
- Cui, P.Y.; Wang, S.; Gao, A.; Yu, Z. X-ray pulsars/Doppler integrated navigation for Mars final approach. Adv. Space Res. 2016, 57, 1889–1990. [Google Scholar] [CrossRef]
- Shearer, A.; Golden, A. Implications of the optical observations of isolated neutron stars. Astrophys. J. 2001, 547, 967–972. [Google Scholar] [CrossRef]
- Yim, J.R.; Crassidis, J.; Junkins, J. Autonomous orbit navigation of interplanetary spacecraft. In Proceedings of the 2000 AIAA/AAS Astrodynamics Specialist Conference, Denver, CO, USA, 14–17 August 2000. [Google Scholar]
- Liu, J.; Fang, J.C.; Ning, X.L. Closed-loop EKF-based Pulsar Navigation for Mars Explorer with Doppler Effects. J. Navig. 2014, 67, 776–790. [Google Scholar] [CrossRef] [Green Version]
- Harlander, J.; Reynolds, R.J.; Roesler, F.L. Spatial Heterodyne Spectroscopy for the Exploration of Diffuse Interstellar Emission Lines at Far-Ultraviolet Wavelengths. Astrophys. J. 1992, 730–740. [Google Scholar] [CrossRef]
- Englert, C.R.; Babcock, D.D.; Harlander, J.M. Doppler asymmetric spatial heterodyne spectroscopy (DASH): Concept and experimental demonstration. Appl. Opt. 2007, 46, 7297–7307. [Google Scholar]
- Ning, X.L.; Fang, J.C. Spacecraft autonomous navigation using unscented particle filter-based celestial/Doppler information fusion. Meas. Sci. Technol. 2008, 19, 95–203. [Google Scholar] [CrossRef]
- Ma, X.; Fang, J.; Ning, X.; Liu, G.; Ye, H. A Radio/Optical Integrated Navigation Method Based on Ephemeris Correction for an Interplanetary Probe to approach a Target Planet. J. Navig. 2016, 69, 613–638. [Google Scholar] [CrossRef]
- Bo, Y. On-orbit calibration approach for optical navigation camera in deep space exploration. J. Deep Space Explor. 2016, 24, 5536. [Google Scholar]
- Ma, X.; Ning, X.L.; Fang, J.C. Analysis of Orbital Dynamic Equation in Navigation for a Mars Gravity-Assist Mission. J. Navig. 2012, 65, 531–548. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Zheng, X.; Cheng, Y.; Chen, X. Scheme and Key Technologies of Autonomous Optical Navigation for Mars Exploration in Cruise and Capture Phase. Geomat. Inf. Sci. Wuhan Univ. 2016. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented Filtering Nonlinear Systems. In Proceedings of the American Control Conference, Washington, DC, USA, 21–23 June 1995. [Google Scholar]
- Qing, Y.; Zhang, H.; Wang, S. Kalman Filter and Integrated Navigation Theory; Northwestern Polytechnic University Press: Xi’an, China, 2012; pp. 221–222. [Google Scholar]
- Huang, X.; Cui, P.; Cui, H. Observability Analysis of Deep Space Autonomous Navigation System. J. Astronaut. 2006, 27, 332–337. [Google Scholar]
- Cui, P.; Chang, X.; Cui, H. Research on Observability Analysis-Based Autonomous Navigation Method for Deep Space. J. Astronaut. 2011, 32, 2115–2124. [Google Scholar]
- Hermann, R.; Krener, A.J. Nonlinear controllability and observability. IEEE Trans. Auto. Control 1977, 22, 728–740. [Google Scholar] [CrossRef] [Green Version]
- Xin, M.A.; Chen, X.; Fang, J.; Liu, G.; Ning, X. Observability analysis of autonomous navigation for deep space exploration with LOS/TOA/velocity measurements. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–9. [Google Scholar]
- Tunyasrirut, S. Implementation of a dSPACE Based Digital State Feedback Controller for a Speed Control of Wound Rotor Induction Motor. In Proceedings of the IEEE International Conference on Industry Technology, Hongkong, China, 14–17 December 2005; pp. 1198–1203. [Google Scholar]
- Frauenholz, R.B. Deep impact navigation system performance. J. Spacecr. Rockets 2008, 45, 39–56. [Google Scholar] [CrossRef]
- Wang, F.; Cao, X.B.; Qiu, W.X.; Zhang, S.J.; Sun, Z.W. Hardware-in-the-loop validated simulation platform for small satellite control system. J. Harbin Inst. Technol. 2008, 40, 1681–1685. [Google Scholar]
- dSPACE Inc. dSPACE Implementation Guide; dSPACE Inc.: Paderborn, Germany, 2001. [Google Scholar]
- Bhaskaran, S. Orbit determination performance evaluation of the deep space 1 autonomous navigation system. In Proceedings of the AIAA/AAS Space Flight Mechanics Meeting, Monterey, CA, USA, 1–31 July 1998. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity |
|---|---|
| Initial state | r = [60480784, 216398917, 6349369] km v = [ −20.2006, 10.0324, −0.4970] km/s |
| Initial bias | Δr = [5000, 5000, 5000] km Δv = [100, 100, 100] m/s |
| Initial time | 2021-1-15 05:46:07 UTC |
| End time | 2021-1-25 18:40:00 UTC |
| Navigation Methods | Measurement | Observable Degree |
|---|---|---|
| Angle navigation | LOS to Sun and Mars | 8.9684 × 10−11 |
| Integrated navigation | LOS to Sun and Mars RRV to Sun and other two stars | 8.2405 × 10−8 |
| Symbol | Quantity |
|---|---|
| Step time | 600 s |
| Bias of angle measurement | 2 arc sec |
| Bias of velocity measurement | 1 m/s |
| Unscented Kalman Filter (UKF) basic parameters | , , , |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Sun, Z.; Zhang, W.; Xu, J. A Novel Autonomous Celestial Integrated Navigation for Deep Space Exploration Based on Angle and Stellar Spectra Shift Velocity Measurement. Sensors 2019, 19, 2555. https://doi.org/10.3390/s19112555
Chen X, Sun Z, Zhang W, Xu J. A Novel Autonomous Celestial Integrated Navigation for Deep Space Exploration Based on Angle and Stellar Spectra Shift Velocity Measurement. Sensors. 2019; 19(11):2555. https://doi.org/10.3390/s19112555
Chicago/Turabian StyleChen, Xiao, Zhaowei Sun, Wei Zhang, and Jun Xu. 2019. "A Novel Autonomous Celestial Integrated Navigation for Deep Space Exploration Based on Angle and Stellar Spectra Shift Velocity Measurement" Sensors 19, no. 11: 2555. https://doi.org/10.3390/s19112555
APA StyleChen, X., Sun, Z., Zhang, W., & Xu, J. (2019). A Novel Autonomous Celestial Integrated Navigation for Deep Space Exploration Based on Angle and Stellar Spectra Shift Velocity Measurement. Sensors, 19(11), 2555. https://doi.org/10.3390/s19112555