1. Introduction
In multi-sensor surveillance systems like radar-based tracking, sonar-based tracking, and video-based tracking, multiple target tracking (MTT) is a vital problem that always arises. At the same time, the problems brought by multi-sensor monitoring (different positioning measurement methods lead to differences in the accuracy of various positioning information) have also arisen. Therefore, it is necessary to present a method to make use of the high-precision information in multi-source observation data to correct the low-accuracy information, that is, multi-sensor fusion (MSF).
Unlike some applications of the evidence theories for MSF in target recognition [
1,
2], the purpose of MTT in the MSF scenario is to simultaneously maintain the confirmed tracks for multiple targets and get more accurate estimates of the target trajectories. Once the tracks are generated and confirmed, the number of targets can be estimated and the parameters (velocity, acceleration, future predicted position, etc.) can be computed for each track. Therefore, there are two essential problems in MTT: (1) data/track association; and (2) state estimation/fusion.
The basic step of MTT is the measurement of track association. When a new group of measurements is generated by a sensor, the processing of each observation point can be divided into three situations: (1) assigned to an existing track, (2) considered as a new track, or (3) considered as a false alarm. The global nearest neighbor algorithm (GNN) [
3] is one of the simplest and most widely spread approaches for target tracking association. The GNN simply considers the distances between measurements and tracks and associates those that fall closest to each other. More approaches are based on probabilistic methods (probabilistic data association (PDA) [
4], joint probabilistic data association (JPDA) [
5], nearest neighbor joint probabilistic data association (NNJPDA) [
6], etc.). Take the JPDA algorithm as an example—firstly, multiple track hypotheses are generated in the JPDA, and then the probabilities of the hypotheses are calculated, and the assignment hypotheses of each track are merged. This means that the track states are updated by all the measurements within a track gate. Overall, these methods cannot appropriately manage the appearance or disappearance of tracks and make a so-called “hard” decision on the current observation scan in cases of conflicting measurements to track association hypotheses.
On the other hand, the problems that result from finding the best (or most likely) assignment of input measurements to existing tracks (as in the GNN) or choosing the best hypothesis (as in the JPDA method) have led to a prevalence of the multiple hypothesis tracking (MHT) approach. The MHT method forms alternative association hypotheses in case of observation of track conflict situations and utilizes sequential scans to solve the association problem, which anticipates that future observations will resolve the tracking assignment ambiguities. Generally, the MHT method includes two categories: (1) the hypothesis oriented MHT (HOMHT), and (2) the track oriented MHT (TOMHT). Singer et. al. [
7] first presented the idea of propagating multiple assignment hypotheses. However, the HOMHT proposed by Reid [
8] forms and expands a large number of hypotheses from scan to scan for data association. In contrary to the HOMHT, the TOMHT maintains track trees for incompatible tracks on last scans and prunes all the unreliable tree branches (track hypotheses) to obtain the best global hypothesis [
9]. Recent research on MHT algorithms has mainly focused on improving the association algorithm in MHT [
10,
11,
12,
13,
14]. However, the processing for the covariance setting and only solving linearity problems for the Kalman filter (KF) applied in the MHT state estimation/fusion step, especially when an MSF scenario shows up, is still left to be solved.
On the other hand, the main target state estimation/fusion methods include the KF, the extended Kalman filter (EKF), and the particle filter (PF), etc. The KF can achieve higher computational efficiency only when there are few system parameters. As mentioned before, the KF method is a kind of algorithm which makes use of the linear system state equation to estimate the state of the system by the input and output data of the system, so it cannot deal with non-linear problems [
15]. The EKF method is a nonlinear version of the KF, but it is limited to dealing with weakly nonlinear problems with defined Jacobi matrices [
16]. Septier et al. [
17] uses Markov chain Monte Carlo (MCMC) techniques for multi-target tracking. The main problem with MCMC strategies is that they are iterative in nature and take an unknown number of iterations to converge. The PF algorithm is also based on the idea of Monte Carlo theory, in which the probability is expressed by the form of a particle set, but it requires a large number of samples to complete the calculation. Vehtari et al. [
18] proposed a Rao-Blackwellized PF based EKF algorithm for MTT. However, this research still is still based on the assumption that the target dynamics are linear and the ability to solve nonlinear problems is limited by the EKF.
The ensemble Kalman Filtering method (EnKF) is another effective extension of the KF method used to deal with nonlinear problems [
19]. Cui and Zhang [
20] applied the EnKF method to a multi-sensor target tracking problem, in which the observation error of different sensors was assumed to have the same value. This study proved that the EnKF method is superior to the EKF method for the target tracking result. However, as the EnKF is not perfectly designed in this work, the nonlinearity caused by the coexistence of velocity and acceleration is not considered. Pornsarayouth et al. [
21] used the EnKF method to deal with the problem of “out of sequence” measurements and verify that the EnKF method is superior to KF, PF and EKF in dealing with this kind of problem. However, this research assumes that the target motion keeps uniform velocity and does not realize the prediction of the subsequent trajectory. Zhang et al. [
22] established an improved EnKF model to solve an asynchronous data fusion of a target tracking nonlinearity problem with the coexistence of velocity and acceleration. However, these studies have not extended the EnKF approach to MTT scenarios. Generally speaking, the application of the EnKF method in target trajectory analysis is comparatively preliminary.
In this study, we proposed a modified EnKF to substitute the KF in MHT to deal with the nonlinearity in the MTT and MFS scenarios. This allows us to consider the coupling of acceleration and velocity with nonlinear kinematic equations in each time interval. In addition, the multi-source observation data fusion is realized by using the EnKF, which enables the low-precision observation data to be corrected to high-precision observation data, and the accuracy of the corrected data can be directly calibrated by the statistical information provided by the EnKF results. In the remainder of this paper, we will first introduce the MHT in general terms (
Section 2). Then, we will present the modification on the EnKF for the MHT and their combination for the MTT in the MSF scenario (
Section 3). The experimental results and discussion are in
Section 4. Finally,
Section 5 concludes the paper.
3. TOMHT with Modified EnKF
The EnKF method is mainly divided into two steps: a forecast step and an update step. In the forecast step, first, a set of sample parameters is generated to predict future changes of the mode based on a priori information of the sample parameters. Each of these sample parameters is in the form of a model state vector that contains dynamic and static parameters and observations. In the update step, the state vector in the parameter sample set is corrected by comparing the difference between the predicted value obtained by the prediction step and the actual observation data. This section will modify the EnKF method to handle multi-source data fusion problems for the TOMHT.
3.1. Ensemble Matrix
An ensemble matrix
Y is first introduced in the EnKF, of which each column represents each element in the sample set. Therefore, each column is defined as a state vector
, with
j being the label of the state vector and the
j-th column of the ensemble matrix. The state vector consists of dynamic and static parameters, which can be expressed as:
where
Ne is the number of samples in the ensemble,
represents the dynamic parameters,
represents static parameters and
is the time of scan
k.
is the mean of the ensemble matrix:
where
is a
matrix with each element being
. Then, the disturbance in the ensemble matrix
Y can be expressed as:
Then, the covariance matrix
for the sample ensemble is:
3.2. Observation Matrix
Meanwhile, the measurement vector
is introduced, where
is the total number of observation values. We add a perturbation {
} with zero mean to
to obtain the measurement matrix
D:
where
is defined as:
is the observation vector at time
of scan
k. In the multi-sensor data fusion scenario, the perturbation or observation error {
} will be different for each sensor. Thus, Equation (16) in the EnKF should be modified to meet the demands:
where
represents the perturbation for sensor
n at time
. The perturbation matrix
of sensor
n can be expressed as:
The observation covariance matrix of sensor
n at time
is:
3.3. Update Step of the EnKF
The update for the ensemble
is represented as follows:
where
and
are the covariance matrices of
Y and
D,
is the updated state vector, and
is the predicted state vector obtained from previous timestep.
is defined as:
In the multi-sensor data fusion scenario, Equation (20) and Equation (21) should be modified as:
where the matrix
H is a mapping matrix between the model parameter state vector
and the observation vector
. Usually, there is no linear mapping between the model parameter state vector
and the observation vector
due to the strong nonlinearity of the model. This is the reason why the KF is unable to deal with nonlinear problems. However, when the predicted values of the observation data are contained in the elements of the state vector
, the form of the mapping matrix will be very simple. The elements in the mapping matrix H will only include 0 and 1:
where
I is a
identity matrix and
O is a
zero matrix.
3.4. Forecast Step of the EnKF
In this study, we no longer assume that the target motion is uniform during each time interval, so the state parameters are the target position (
xs,
ys), velocity (
xv,
yv), and acceleration (
xa,
ya). The state vector
at time
is expressed as:
The predicted state vector
at time
is expressed as:
Let
represent the time interval between time
and
. The nonlinear dynamic governing equation used in this study is expressed as:
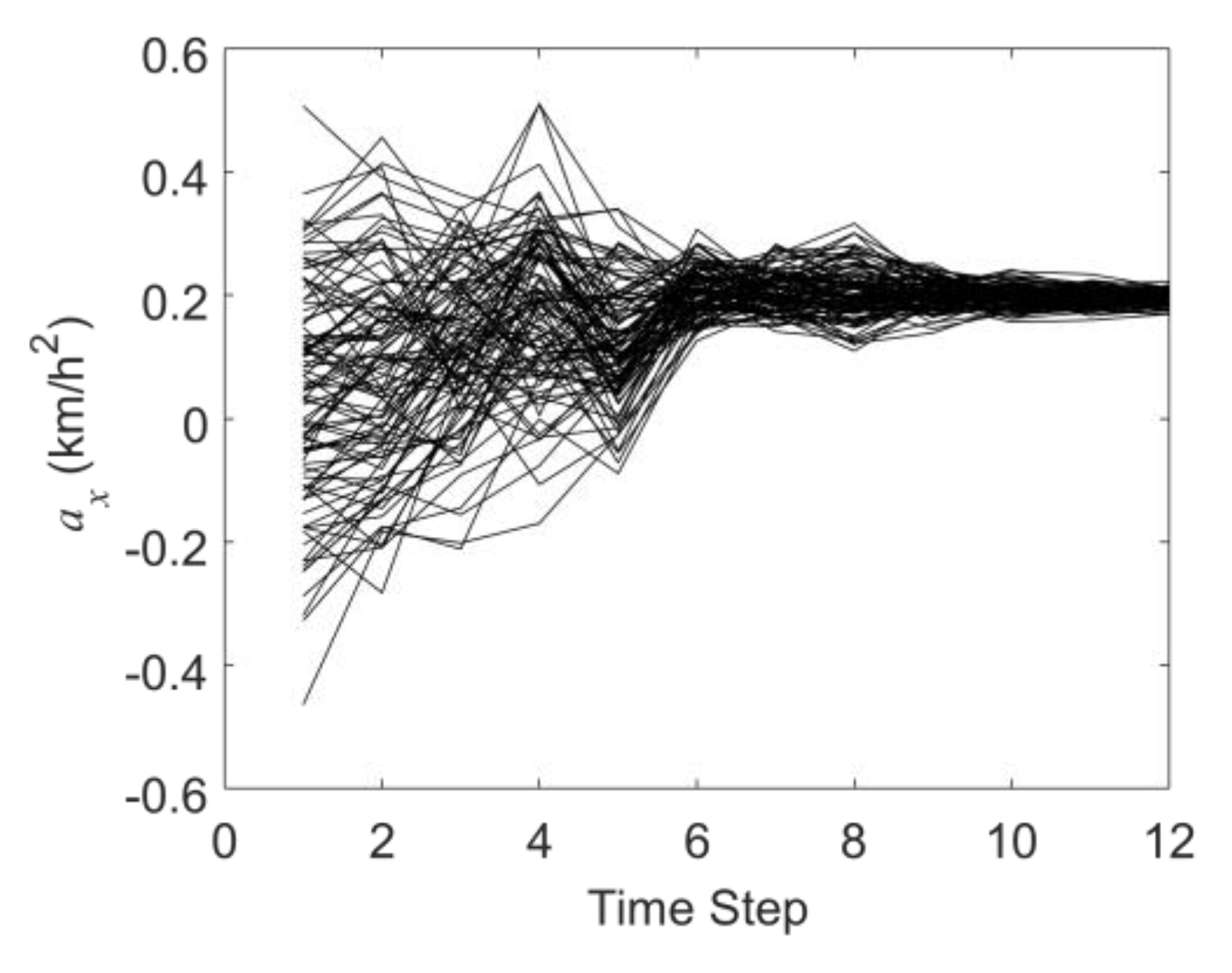
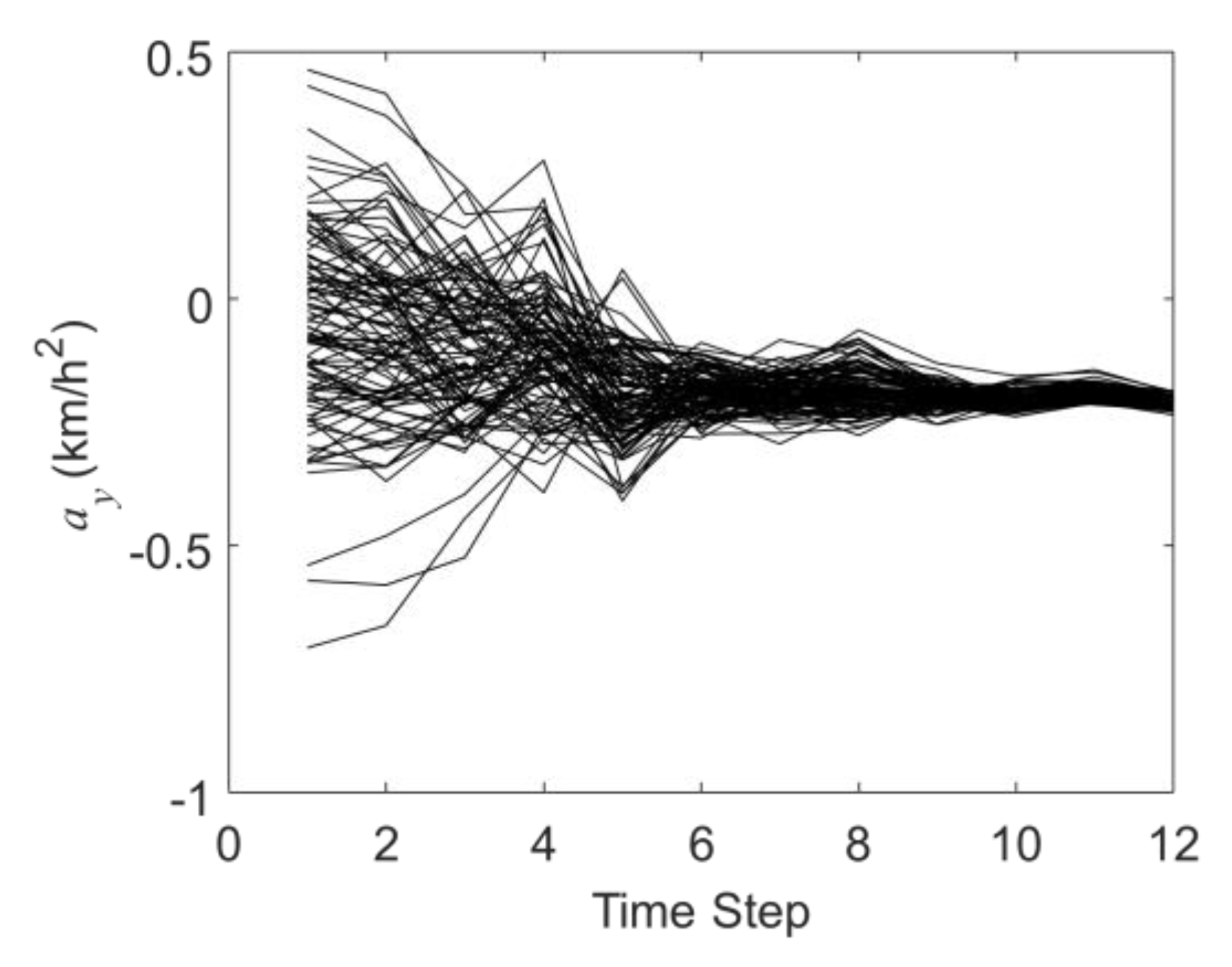
Although the predicted value of the acceleration value in Equation (27) is tentatively set to the acceleration value at the previous time, this acceleration is continuously corrected in the EnKF update step. After obtaining the predicted state vector , Equation (20) can be used to update the .
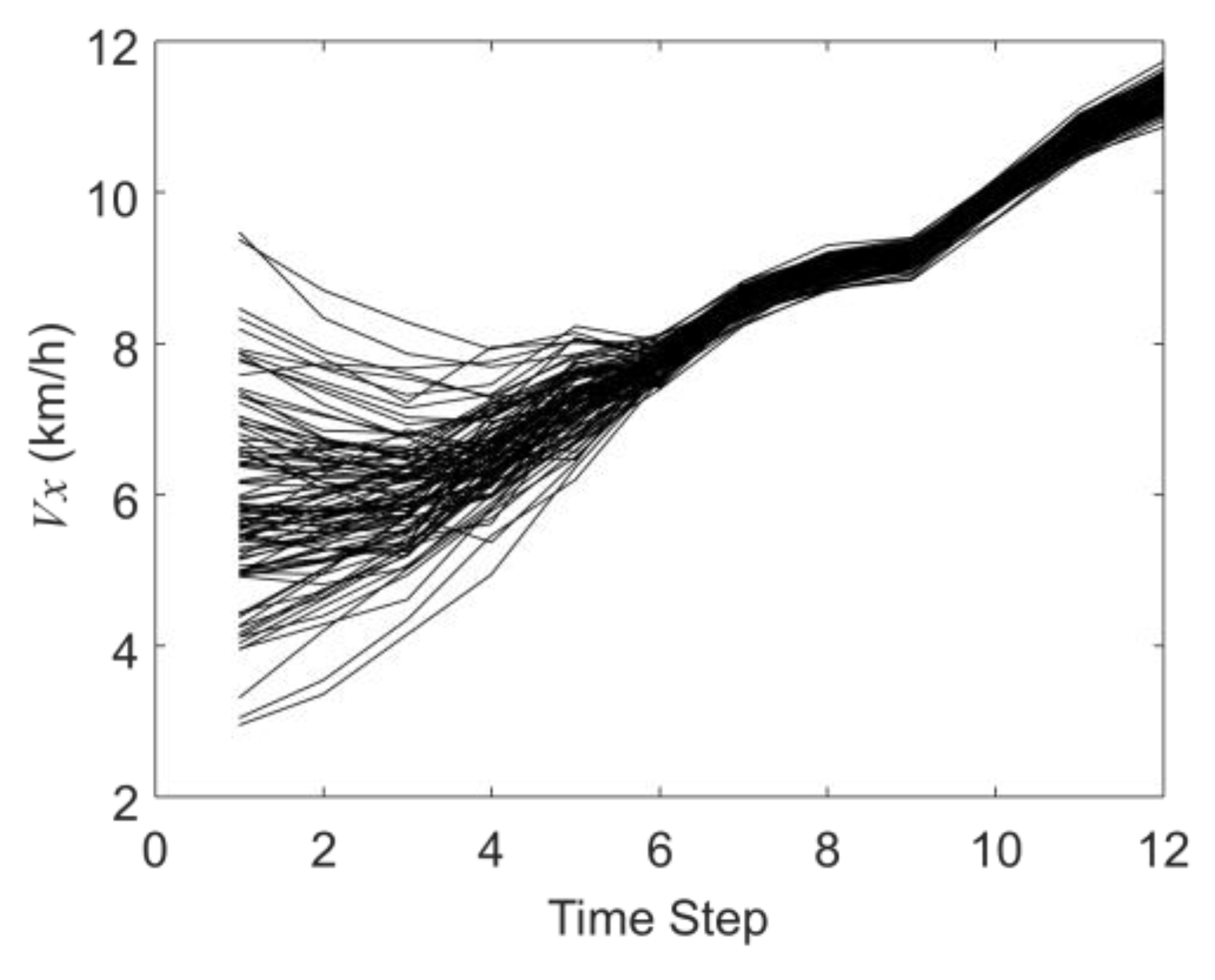
As the observation data of each time step continuously enters the EnKF system (history fitting process), the parameters (speed and acceleration) in the state vector can be gradually corrected and gradually approaches the true value.
Finally, by substituting Equation (20) to Equation (27) for Equation (7) to Equation (10) in TOMHT, the model system of the TOMHT based on the EnKF (MHT-EnKF) is established and can be applied to solve nonlinear movements in multi-sensor data fusion scenarios.
5. Conclusions
Target trajectory analysis based on multi-sensor detection data has always been one of the research focuses in the field of target tracking. In this paper, the EnKF method is modified to solve the MSF problem and a set of nonlinear kinematics equations in the forecast step of the EnKF are constructed, which makes the modified EnKF method capable of dealing with the nonlinearity of the coupling of velocity and acceleration. Furthermore, the MHT is introduced to help the EnKF to cope with the multi-target tracking problem. Thus, unlike former research, the MHT-EnKF method established in this study is able deal with nonlinear MTT problems in MSF scenarios.
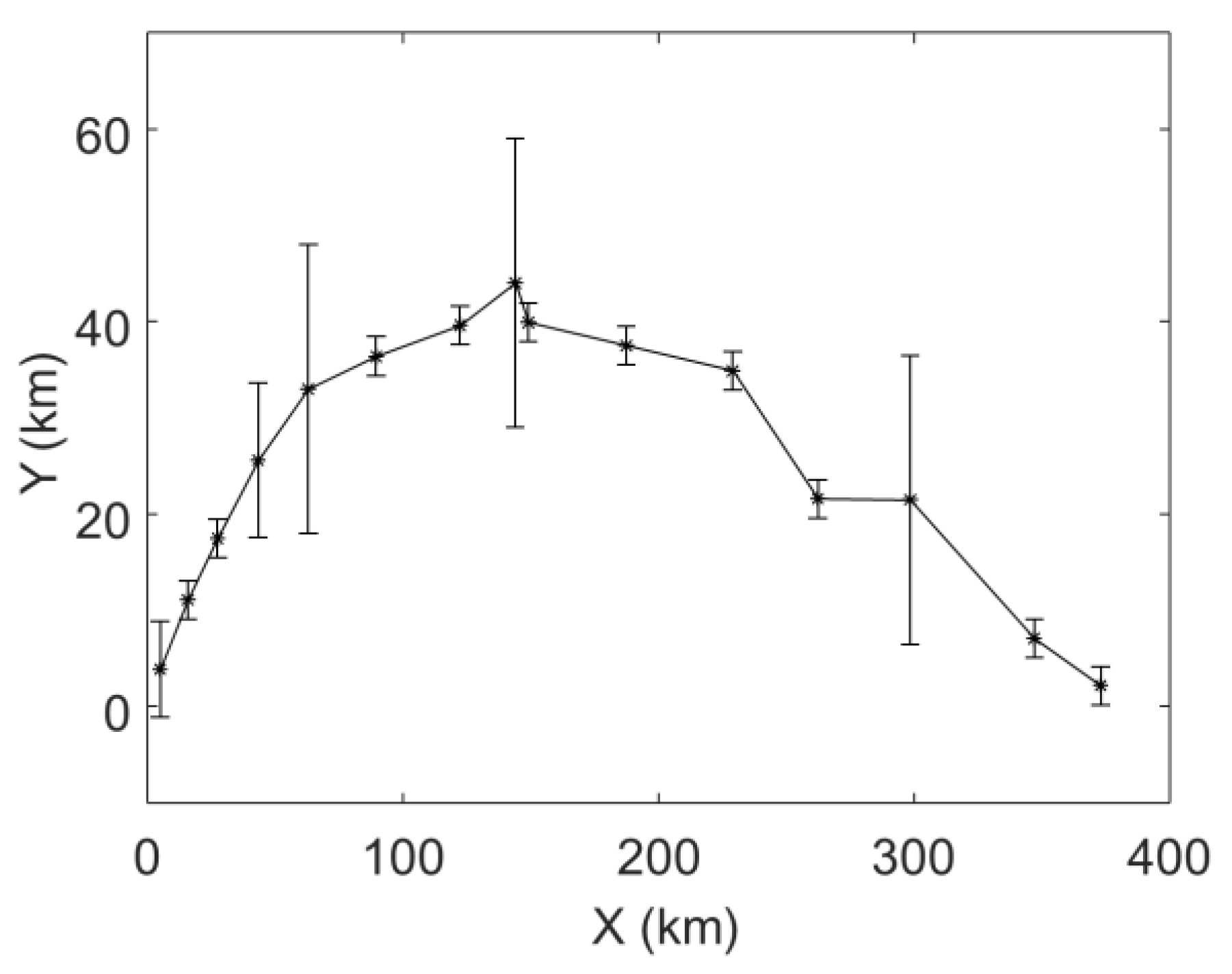
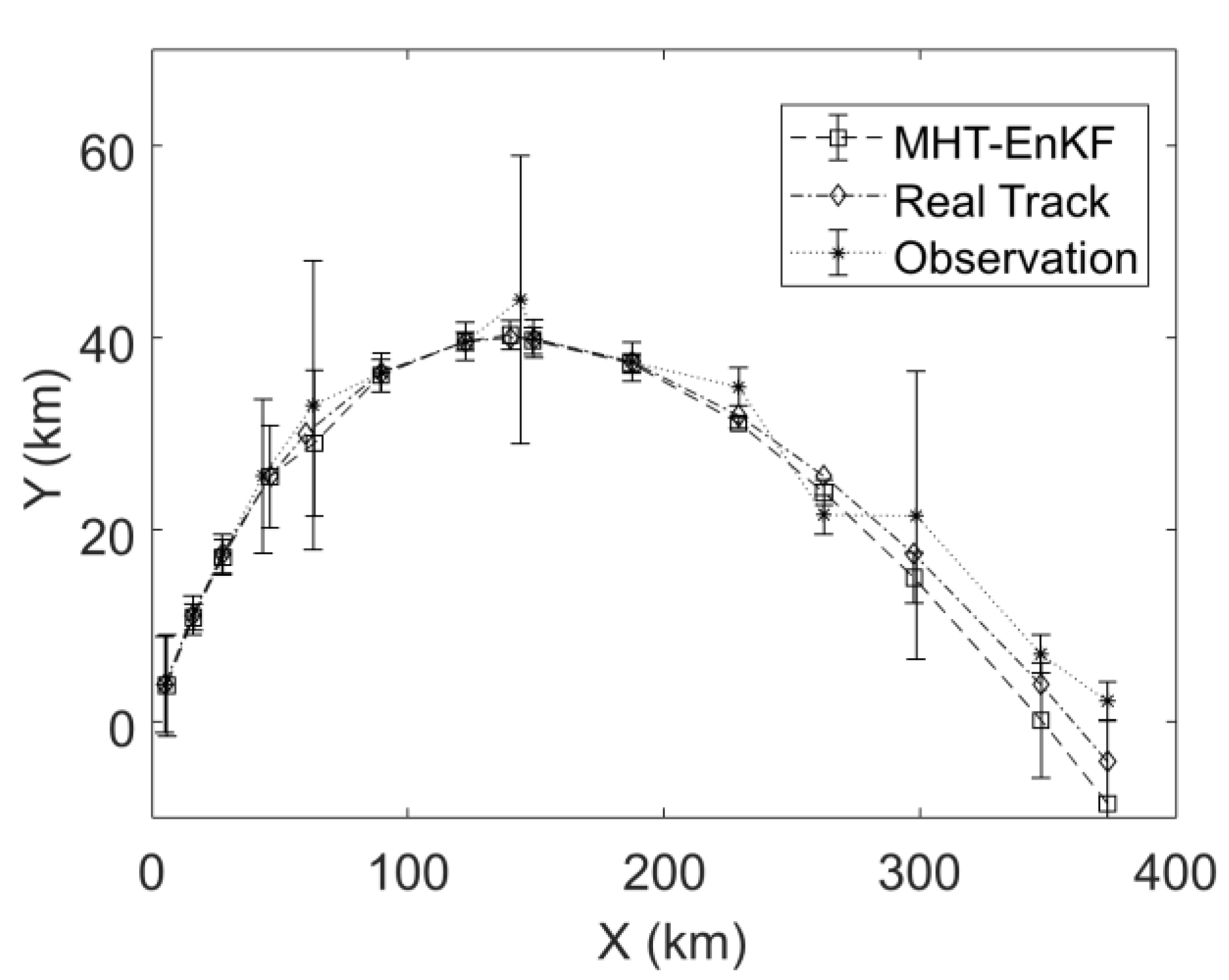
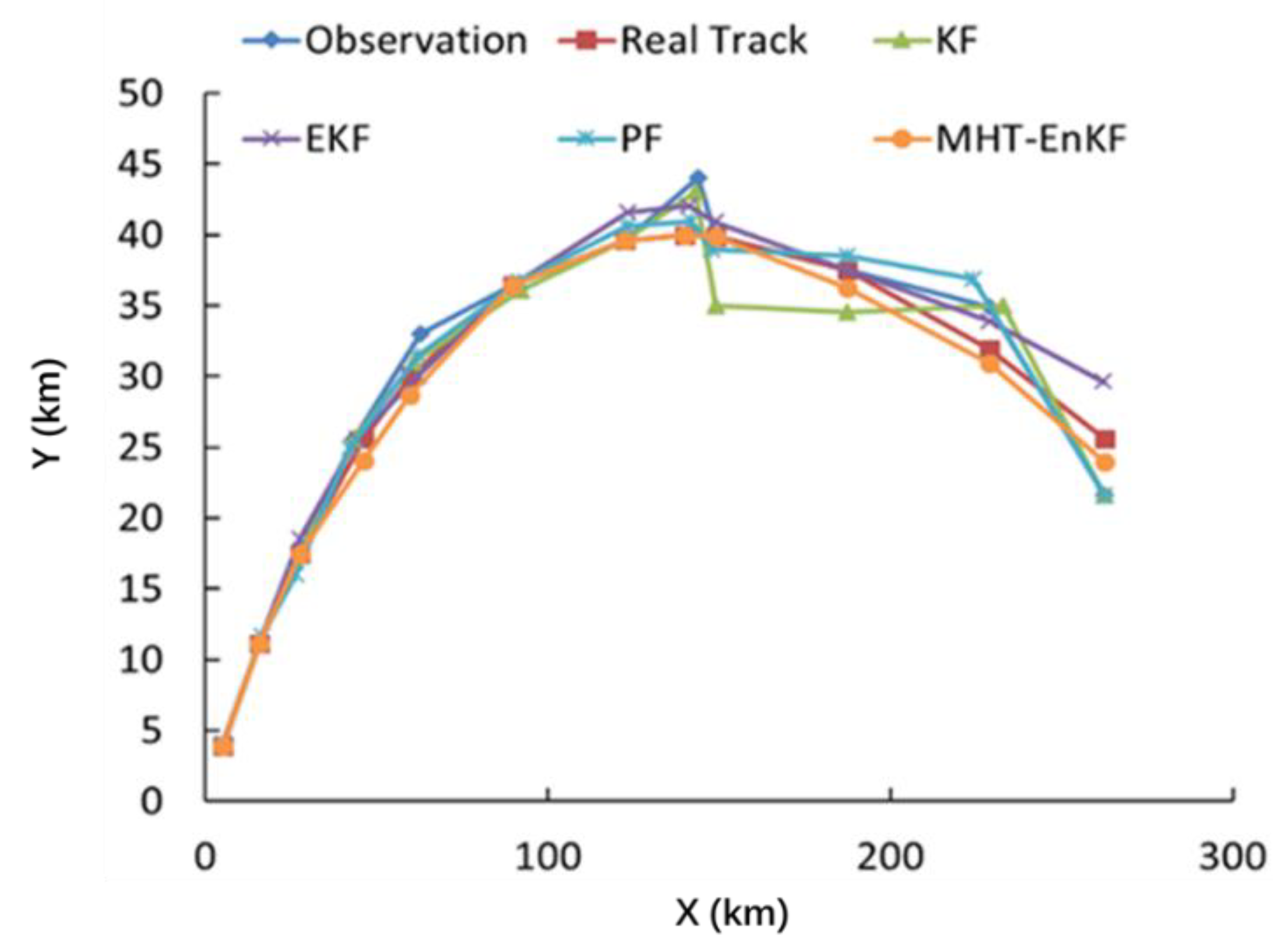
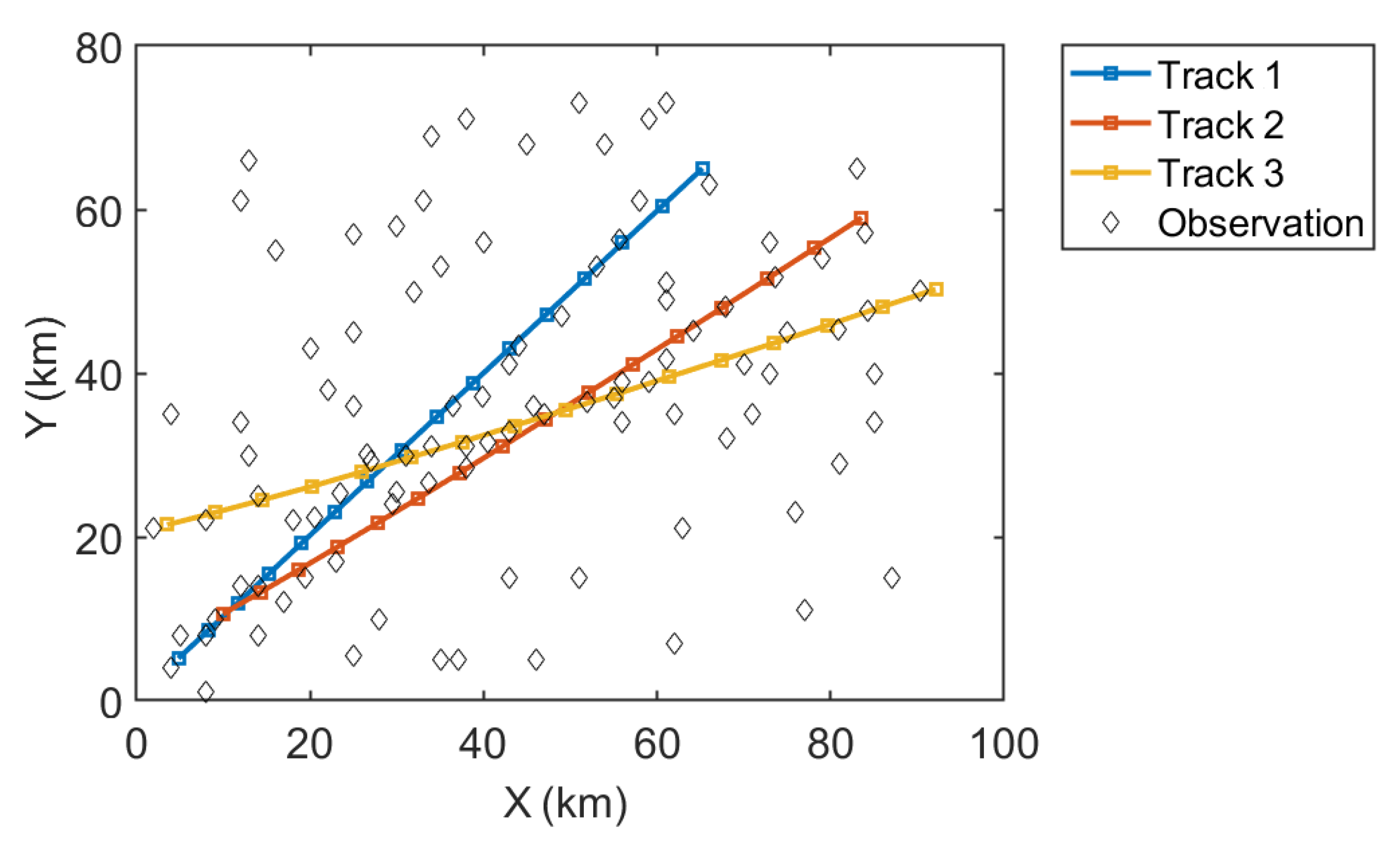
Meanwhile, the feasibility of applying the MHT-EnKF model in MSF scenarios is verified by two simulation case studies. The following conclusions can be drawn: (1) in the MSF scenario, the motion state (velocity and acceleration) of the target can be accurately fitted by the MHT-EnKF based on the historical trajectory of the target and used to predict the future motion trajectory; (2) by adding different error disturbances to the observation data with different accuracies in the calculation process, the MHT-EnKF method can directly express the uncertainty of the multi-source observation data and take these uncertainty into account in the parameter fitting process; (3) the MHT-EnKF method can realize the fusion of multi-source observation data with different accuracies even for multi-target tracking problems and use high-precision observation data to improve the accuracy of low-precision observation data.
In the end, as the MHT-EnKF model can match the motion state parameters (velocity and acceleration) accurately, the abnormal changes of the target motion state parameters can be monitored. It should be mentioned that this work is not a real time computation. However, as the EnKF is a sequential method, once new data are available, these data can be used to update all parameters. This makes the EnKF suitable for real time computation. Some studies have been applied to solve the real time computation problems for the EnKF using distributed or parallel computing techniques. In addition, the data fusion considered in this study is a multi-sensor asynchronous data fusion problem, which means there is only one sensor monitoring each observation step. Thus, further research can be carried out for real time computing problems for the MHT-EnKF or the multi-sensor synchronous observation data fusion problem when one target may be simultaneously detected by several sensors.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}