A Virtual In-Cylinder Pressure Sensor Based on EKF and Frequency-Amplitude-Modulation Fourier-Series Method

Abstract
:1. Introduction
- (1)
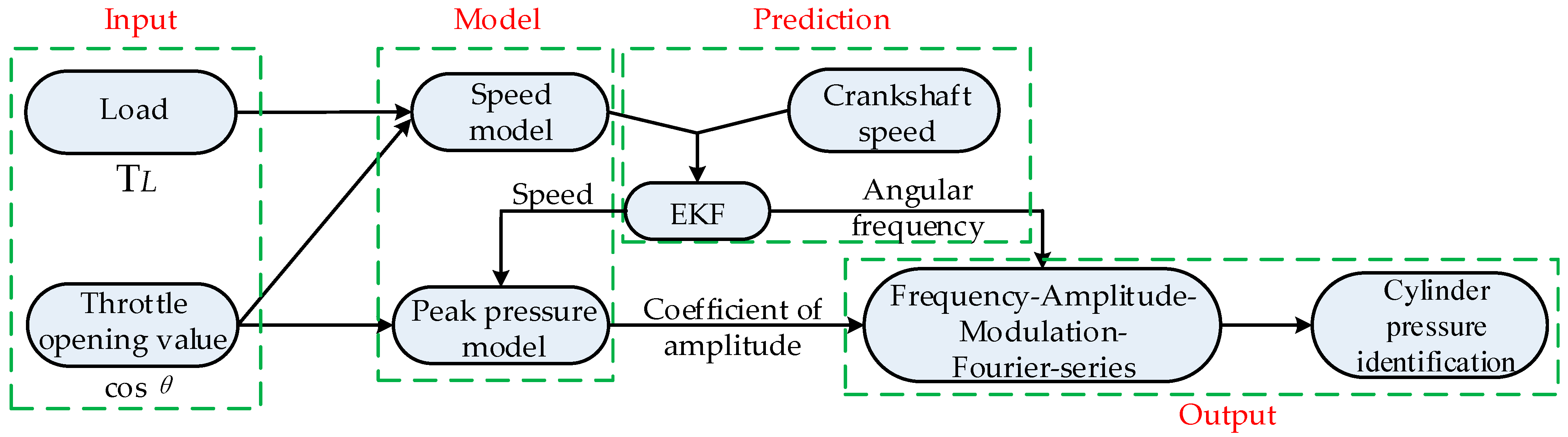
- Aimed to identify in-cylinder pressure and its periodic signals with variable frequency and amplitude, a virtual pressure sensor for engine healthy monitoring with low-cost, real-time, non-intrusive, a long-lifespan, and high-reliability in severe working conditions is presented.
- (2)
- A novel speed model is established according to burning theory, Law of energy Conservation and EKF. The FAMFS method is next developed to fit the periodic signals with variable frequency and variable amplitude.
- (3)
- The proposed method can be applied to multi-cylinder internal combustion (IC) engines including four-cylinder engines.
2. Crankshaft Speed Model
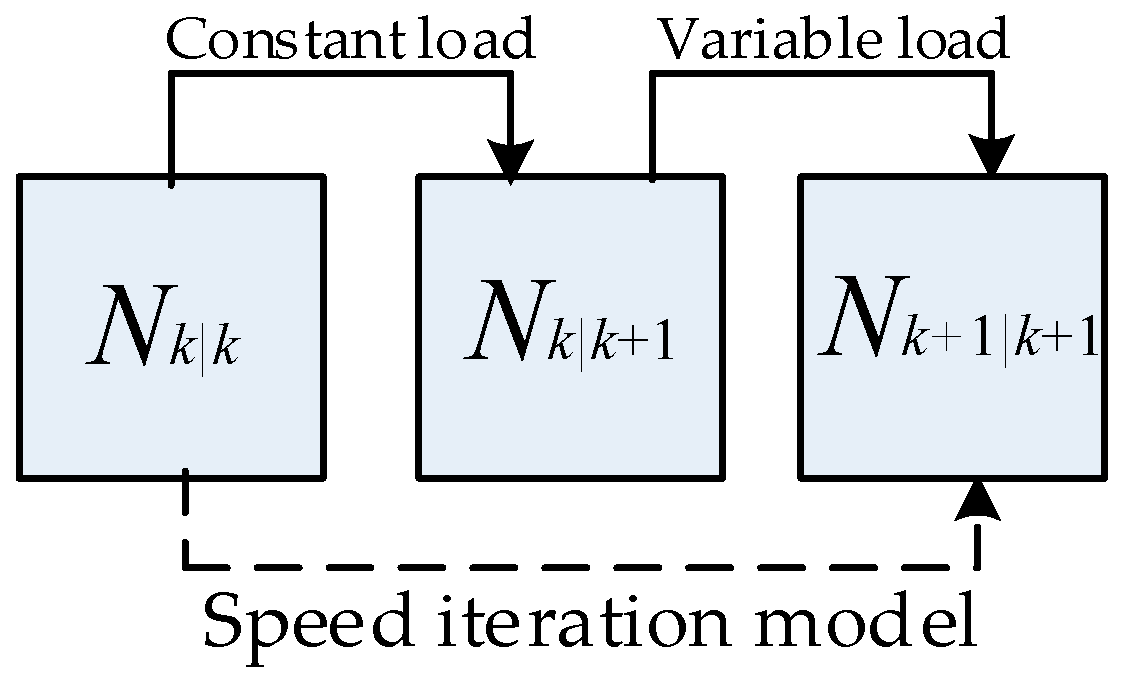
2.1. Design of Speed Iteration Model
2.1.1. Constant Load Condition
2.1.2. Variable Load Condition
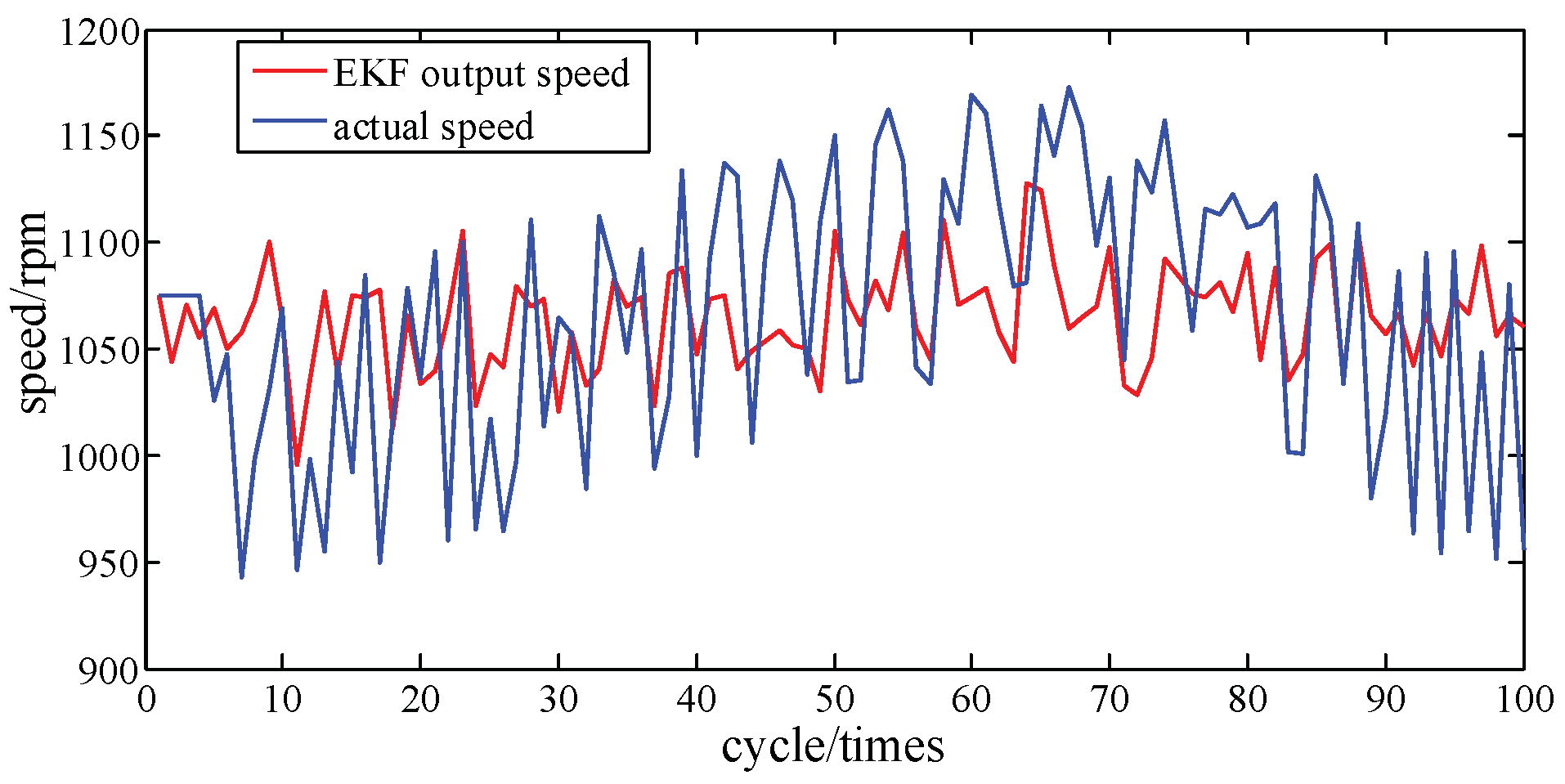
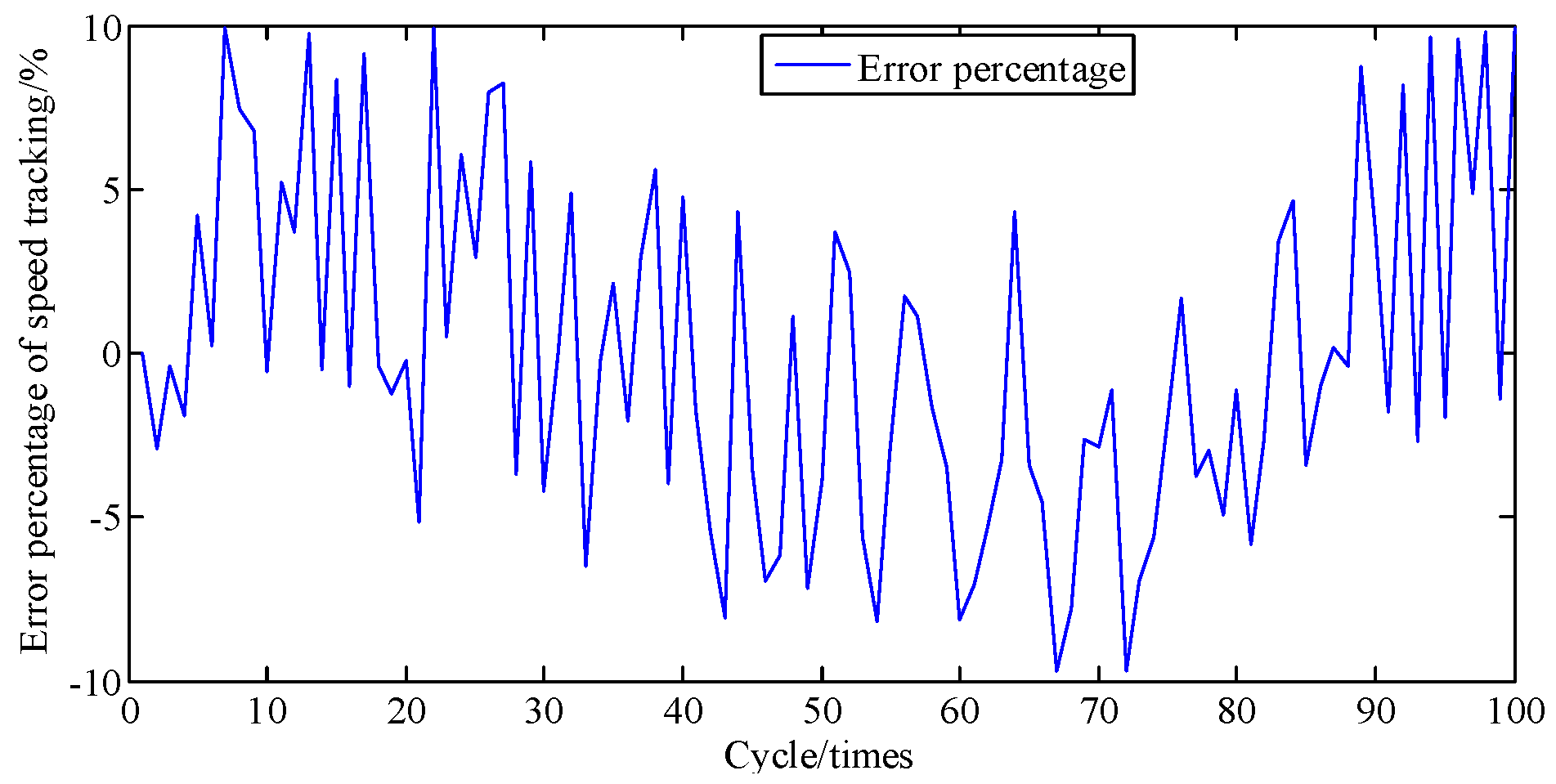
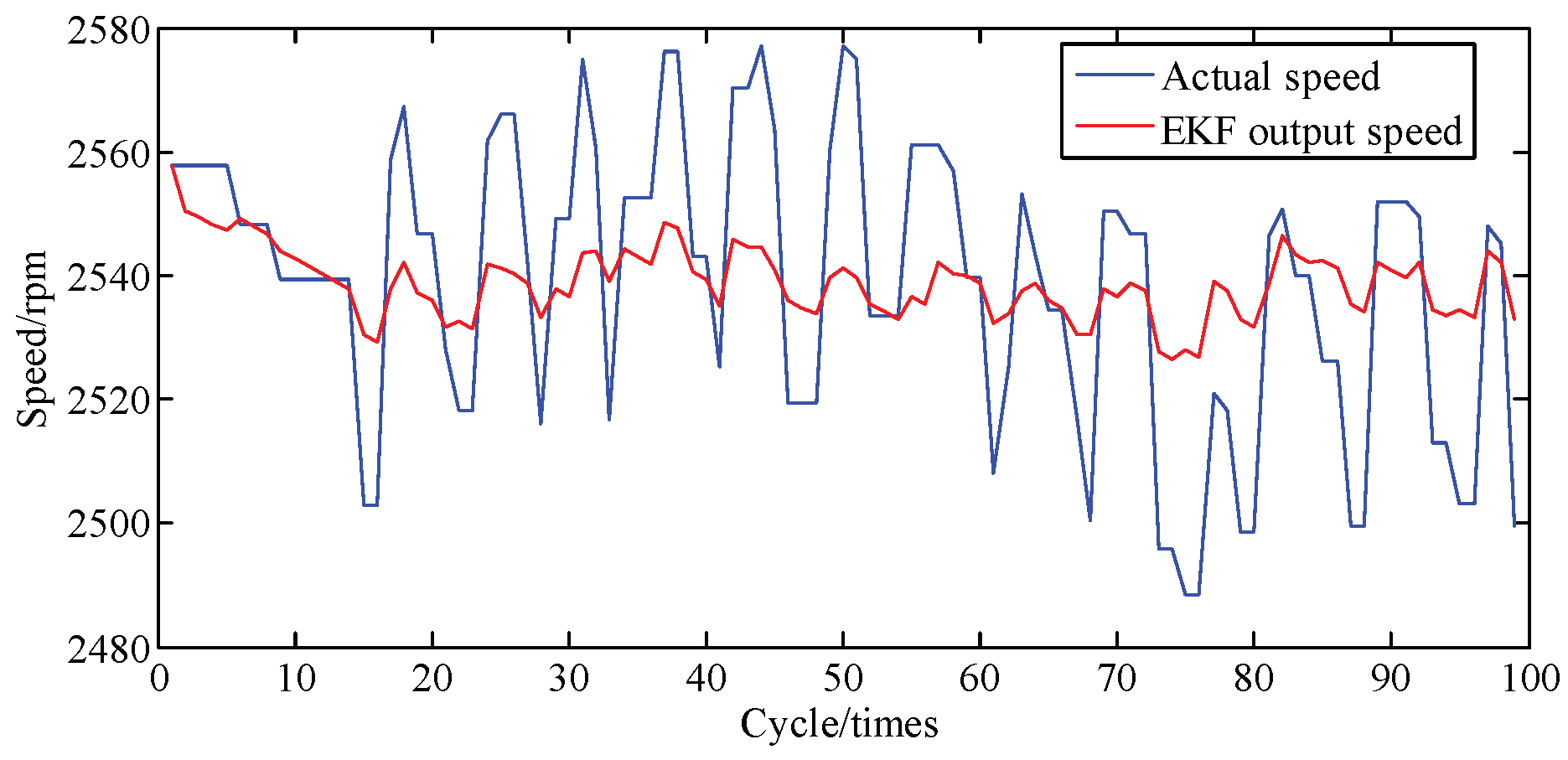
2.2. Design of Extended Kalman Filter
3. Calculation of Cylinder Pressure
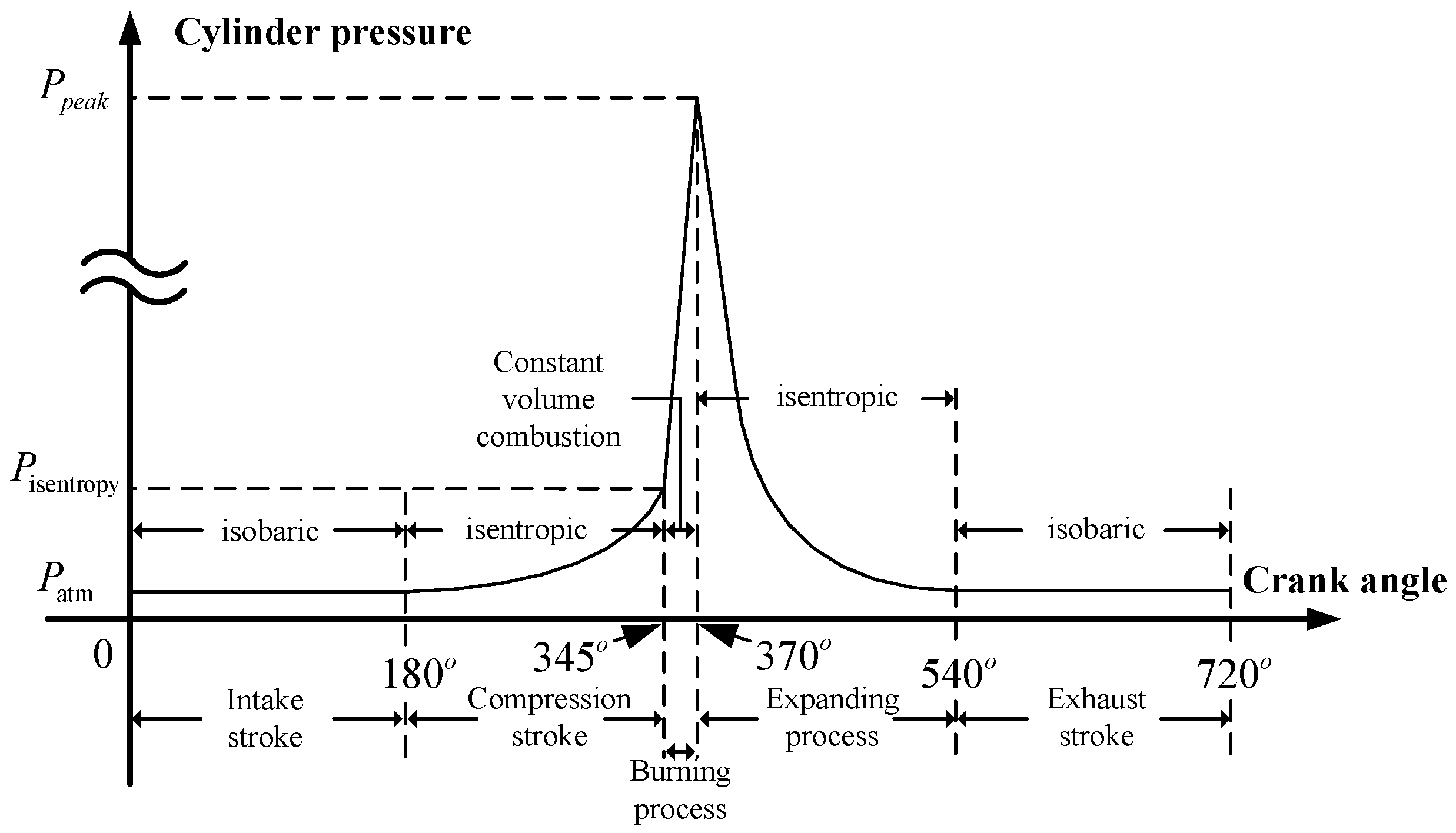
3.1. Cylinder Pressure Peak Time Confirmation
3.2. Computation of Cylinder Pressure Peak Value
4. Modeling of in-Cylinder Pressure
4.1. Frequency-Modulated Fourier-Series
4.2. Pressure Model
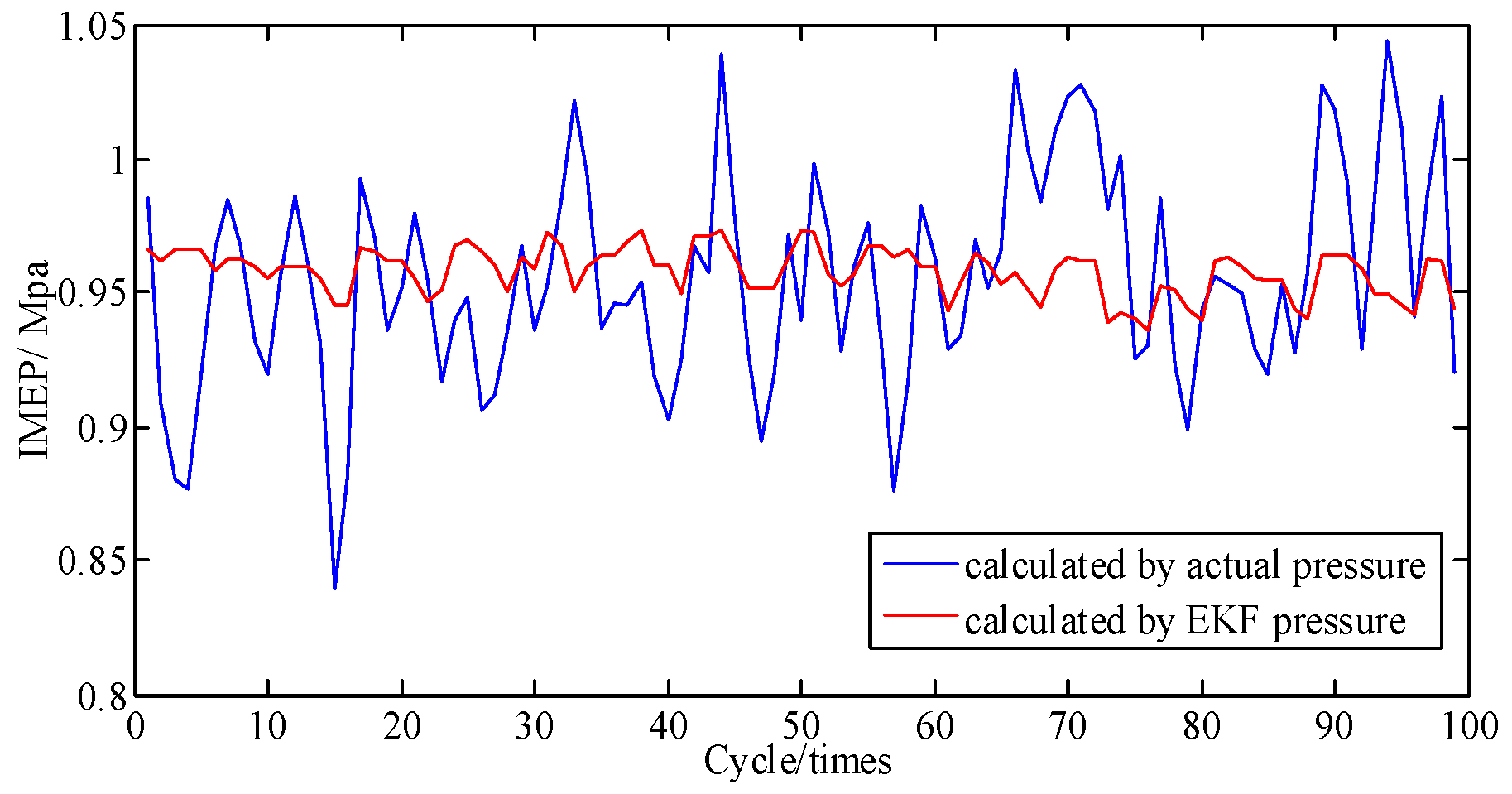
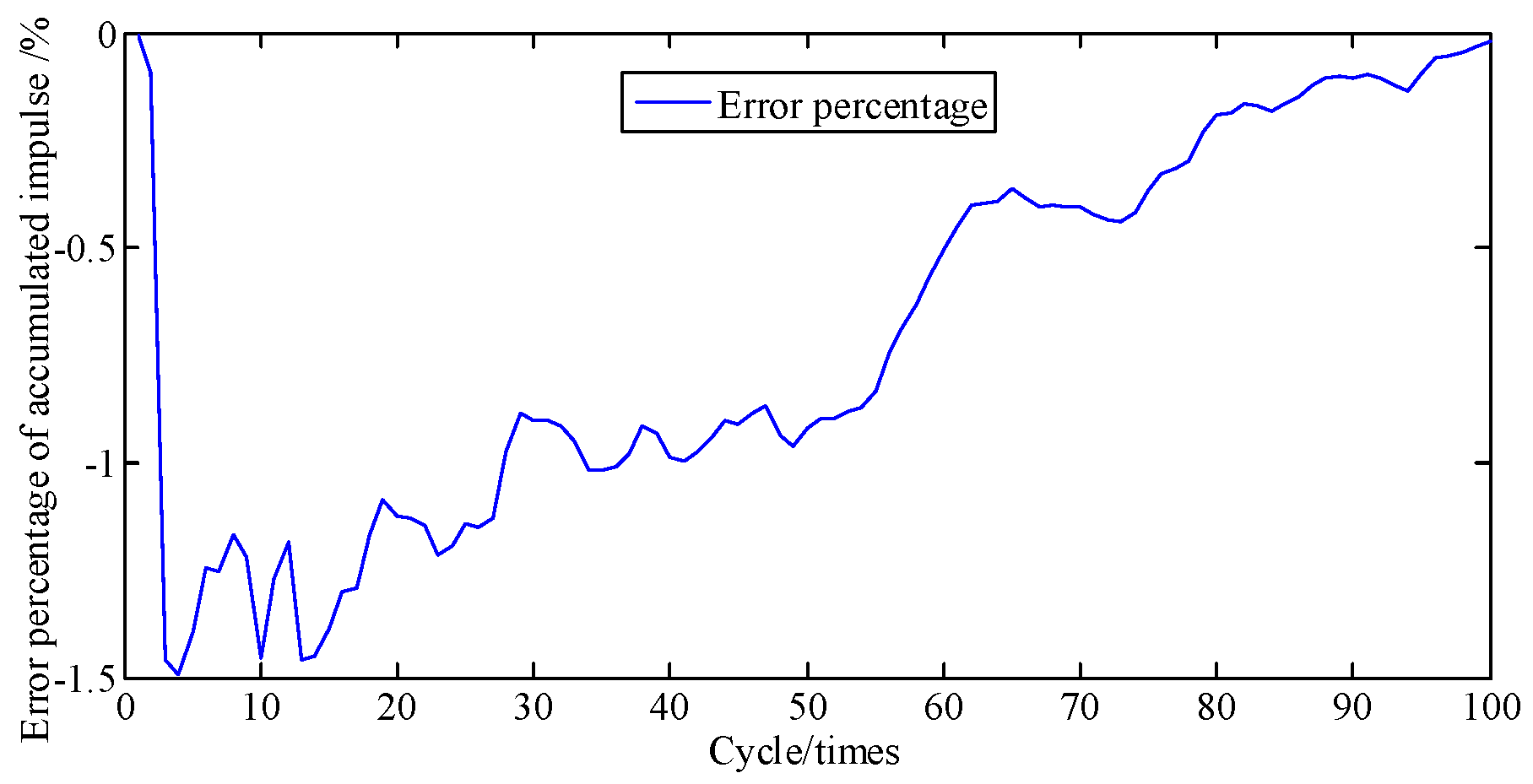
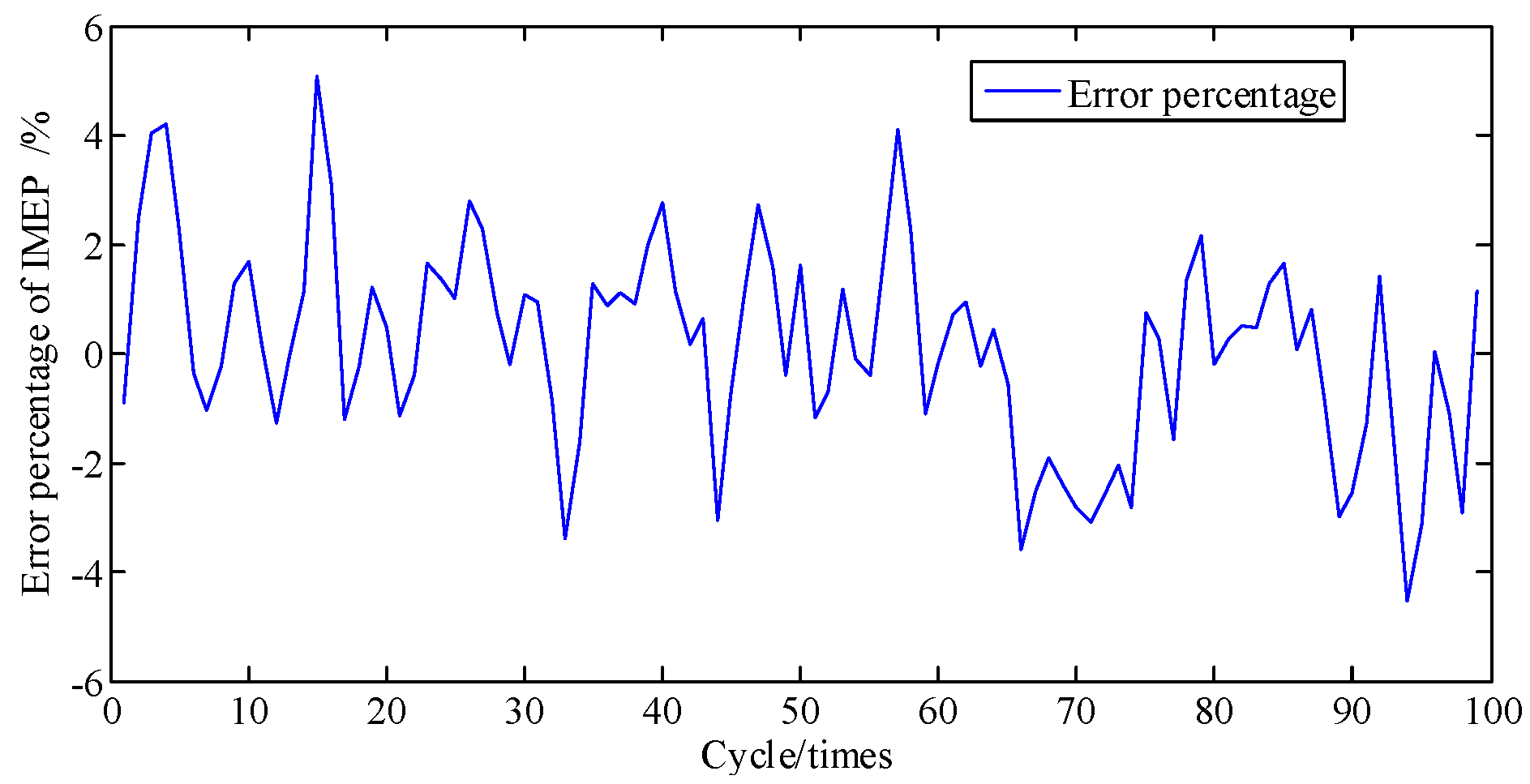
5. Validation and Results
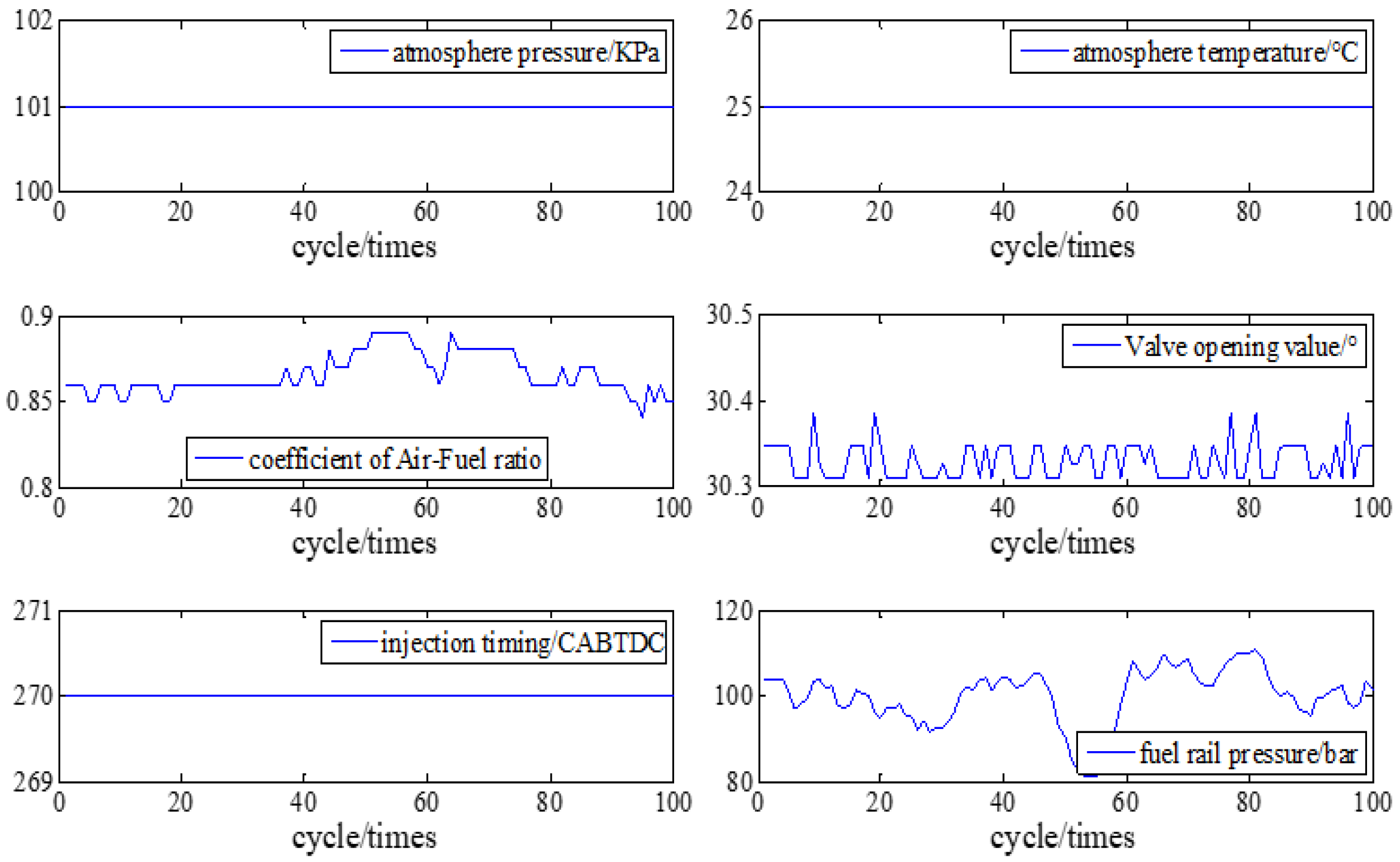
5.1. Set Air-Fuel Ratio Coefficient at 0.85
5.2. Set Air-Fuel Ratio Coefficient at 0.95
6. Conclusions
- (1)
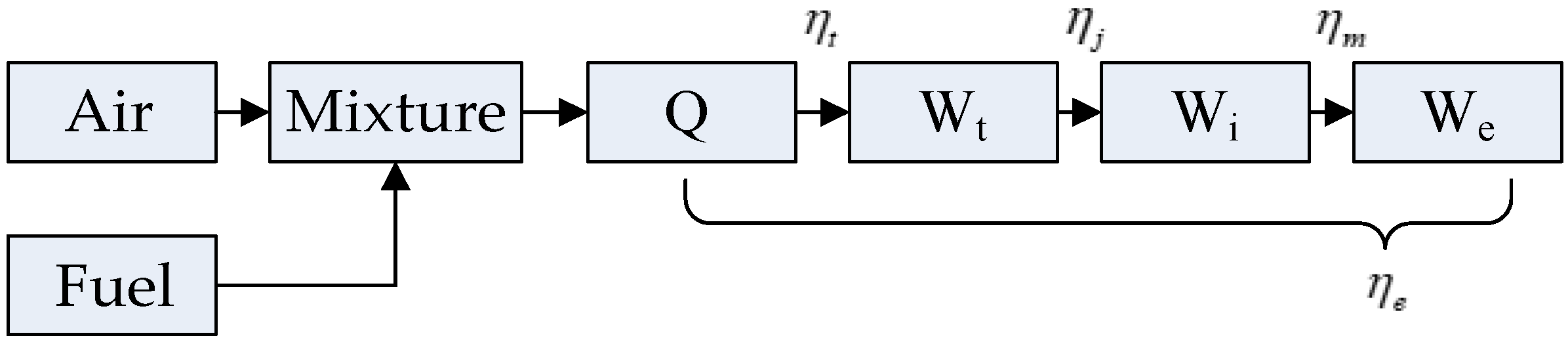
- An iterative speed model based on burning theory and Law of energy Conservation. Efficiency coefficient is used to represent operating state of engine from fuel to motion. The iterative speed model associated with the throttle opening value and the crankshaft load.
- (2)
- The EKF is used to estimate the optimal output of this iteration model. The optimal output of the speed iteration model is utilized to separately compute the frequency and amplitude of the cylinder pressure cycle-to-cycle.
- (3)
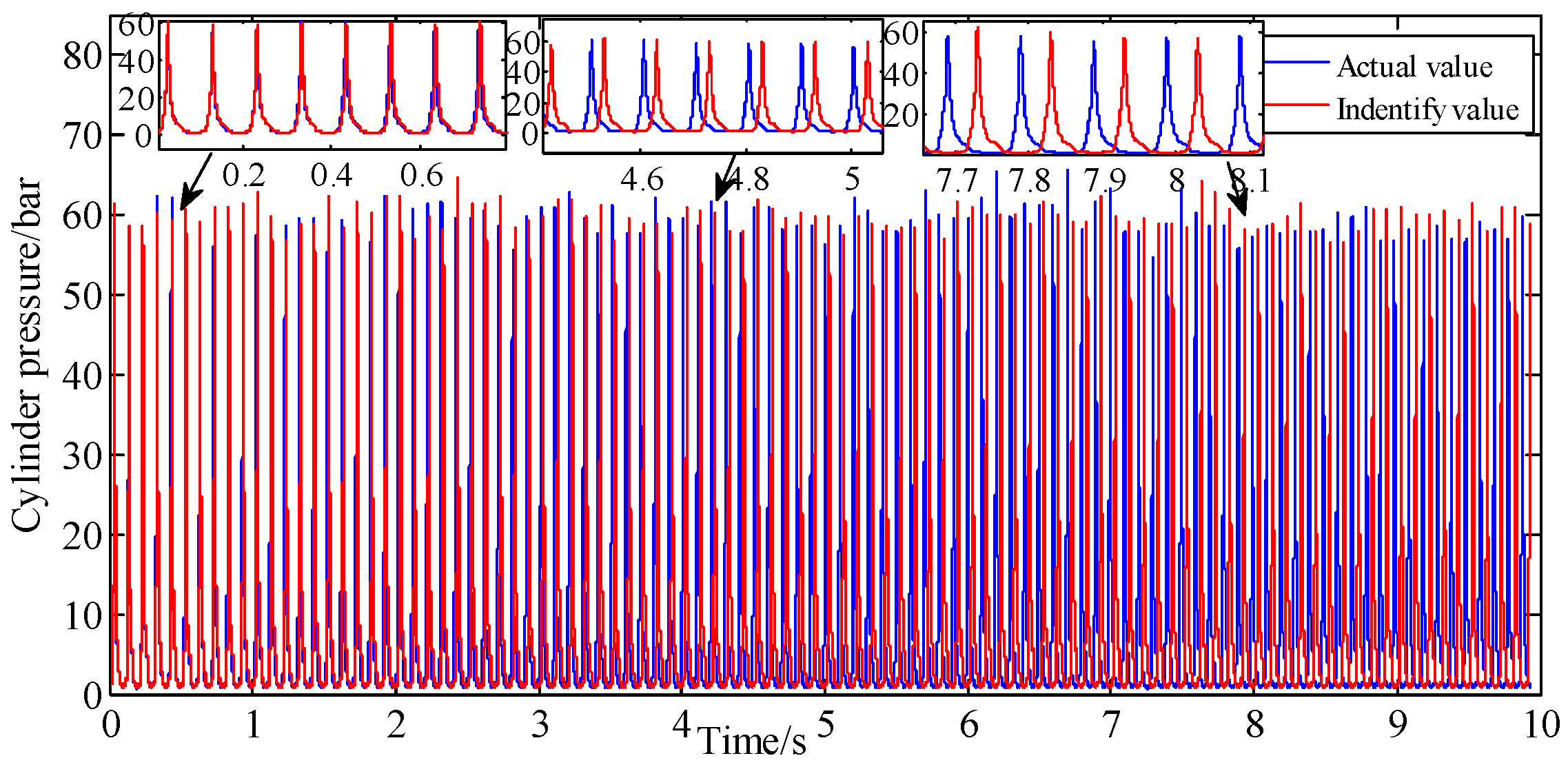
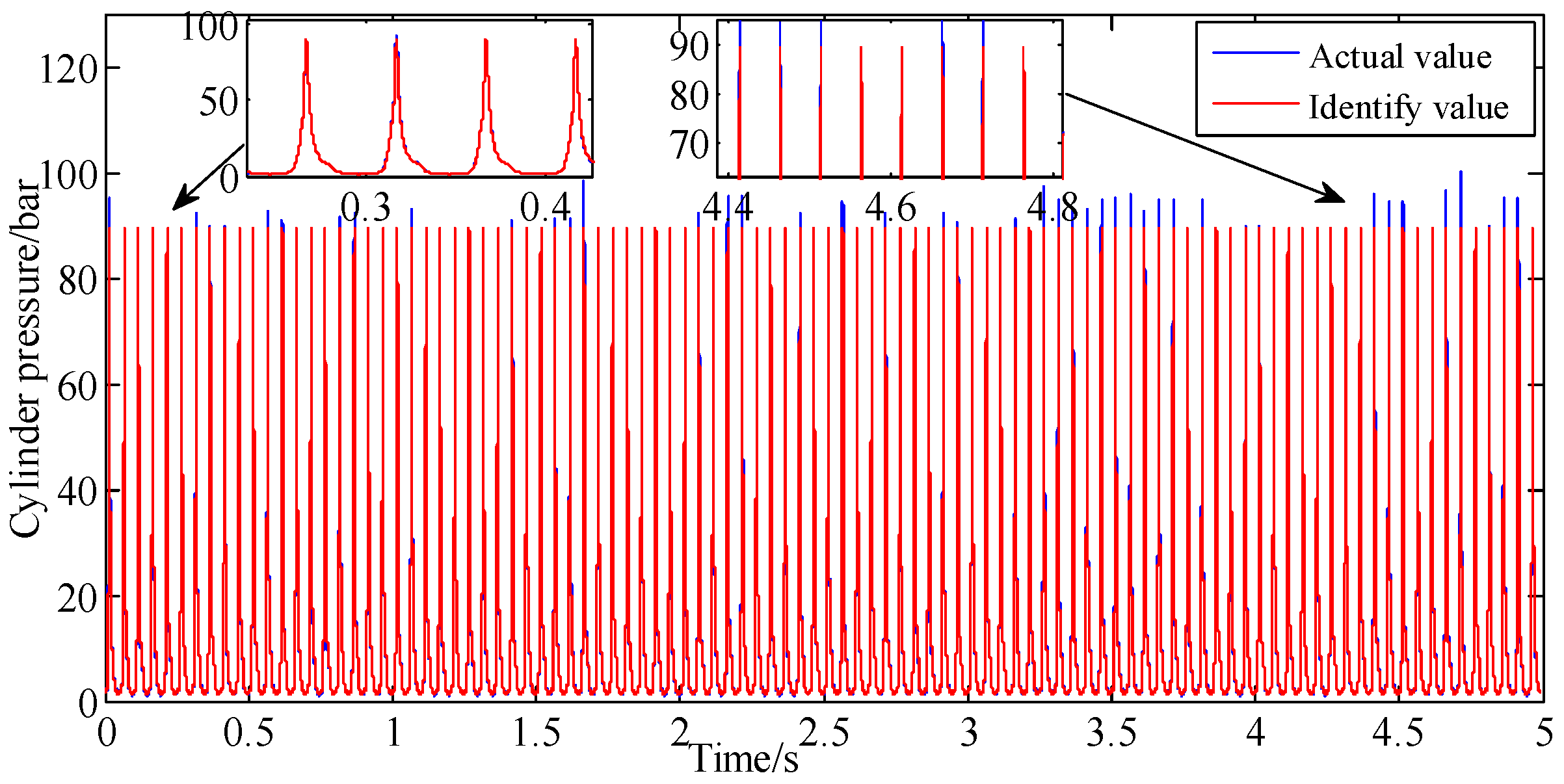
- A pressure fitting algorithm is established by a 24th-order FAMFS. With this process an approximate identification method for engine cylinder pressure is developed in a standard engine’s working cycle.
Author Contributions
Funding
Conflicts of Interest
References
- Guardiola, C.; Pla, B.; Bares, P.; Stefanopoulou, A. Cylinder charge composition observation based on in-cylinder pressure measurement. Measurement 2019, 131, 559–568. [Google Scholar] [CrossRef]
- Rizzoni, G.A. A stochastic model for the indicated pressure process and the dynamics of the internal combustion engine. IEEE Trans. Veh. Technol. 1989, 38, 180–192. [Google Scholar] [CrossRef]
- Min, K.; Chung, J.; Sunwoo, M. Torque balance control for light-duty diesel engines using an individual cylinder IMEP estimation model with a single cylinder pressure sensor. Appl. Therm. Eng. 2016, 109, 440–448. [Google Scholar] [CrossRef]
- Bennett, C.; Dunne, J.F.; Trimby, S.; Richardson, D. Engine cylinder pressure reconstruction using crank kinematics and recurrently-trained neural networks. Mech. Syst. Signal Process. 2017, 85, 126–145. [Google Scholar] [CrossRef]
- Bodisco, T.; Brown, R.J. Inter-cycle variability of in-cylinder pressure parameters in an ethanol fumigated common rail diesel engine. Energy 2013, 52, 55–65. [Google Scholar] [CrossRef] [Green Version]
- Rizvi, M.A.; Bhatti, A.I.; Butt, Q.R. Hybrid model of the gasoline engine for misfire detection. IEEE Trans. Ind. Electron. 2011, 58, 3680–3692. [Google Scholar] [CrossRef]
- Al-Durra, A.; Canova, M.; Yurkovich, S. A real-time pressure estimation algorithm for closed-loop combustion control. Mech. Syst. Signal Process. 2013, 38, 411–427. [Google Scholar] [CrossRef]
- Cook, J.A.; Powell, B.K. Modeling of an internal combustion engine for control analysis. IEEE Control Syst. Mag. 1988, 8, 20–26. [Google Scholar] [CrossRef]
- Sellnau, M.C.; Matekunas, F.A.; Battiston, P.A.; Chang, C.-F.; Lancaster, D.R. Cylinder-Pressure-Based Engine Control Using Pressure-Ratio-Management and Low-Cost Non-Intrusive Cylinder Pressure Sensors. SAE Technical Paper Series 2000, 899–918. [Google Scholar]
- Payri, F.; Luján, J.M.; Martín, J.; Abbad, A. Digital signal processing of in-cylinder pressure for combustion diagnosis of internal combustion engines. Mech. Syst. Signal Process. 2010, 24, 1767–1784. [Google Scholar] [CrossRef]
- Maurya, R.K. Estimation of optimum number of cycles for combustion analysis using measured in-cylinder pressure signal in conventional CI engine. Measurement 2016, 94, 19–25. [Google Scholar] [CrossRef]
- Ahmed, Q.; Bhatti, A.I.; Iqbal, M. Virtual sensors for automotive engine sensors fault diagnosis in second-order sliding modes. IEEE Sens. J. 2011, 11, 1832–1840. [Google Scholar] [CrossRef]
- Ferrari, A.; Paolicelli, F. A virtual injection sensor by means of time frequency analysis. Mech. Syst. Signal Process. 2019, 116, 832–842. [Google Scholar] [CrossRef]
- Eriksson, L.; Nielsen, L. Towards on-board engine calibration with feedback control incorporating combustion models and ion-sense. Automatisierungstechnik 2003, 51, 204–212. [Google Scholar] [CrossRef]
- Huo, X.; Ma, L.; Zhao, X.; Zong, G. Observer-based fuzzy adaptive stabilization of uncertain switched stochastic nonlinear systems with input quantization. J. Frankl. Inst. 2019, 356, 1789–1809. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, X.; Zhang, S.; Zong, G. Adaptive neural backstepping control design for a class of non-smooth nonlinear systems. IEEE Trans. Syst. Man, Cybern. Syst. 2018, 1–12. [Google Scholar] [CrossRef]
- Balyts’kyi, O.I.; Abramek, K.F.; Shtoeck, T.; Osipowicz, T. Diagnostics of degradation of the lock of a sealing ring according to the loss of working gases of an internal combustion engine. Mater. Sci. 2014, 50, 156–159. [Google Scholar] [CrossRef]
- Balyts’kyi, O.I.; Abramek, K.F.; Mruzik, M.; Stoeck, T.; Osipowicz, T. Evaluation of the losses of hydrogen-containing gases in the process of wear of pistons of an internal-combustion engine. Mater. Sci. 2017, 53, 289–294. [Google Scholar] [CrossRef]
- Desbazeille, M.; Randall, R.B.; Guillet, F.; Badaoui, M.; Hoisnard, C. Model-based diagnosis of large diesel engines based on angular speed variations of the crankshaft. Mech. Syst. Signal Process. 2010, 24, 1529–1541. [Google Scholar] [CrossRef]
- Taglialatela, F.; Lavorgna, M.; Mancaruso, E.; Vaglieco, B.M. Determination of combustion parameters using engine crankshaft speed. Mech. Syst. Signal Process. 2013, 38, 628–633. [Google Scholar] [CrossRef]
- Naik, S. Advanced misfire detection using adaptive signal processing. Int. J. Adapt. Control Signal Process. 2004, 18, 181–198. [Google Scholar] [CrossRef]
- Zhihua, P.L.Y.J.W.; Xinping, Z.Y.Y. Diagnosing Leakage of Valves in Engines by Analyzing Instantaneous Speed Fluctuations. J. Wuhan Transp. Univ. 2000, 1, 017. [Google Scholar]
- Seuling, S.; Hamedovic, H.; Fischer, W.; Schuerg, F. Model based engine speed evaluation for single-cylinder engine control. SAE Tech. Pap. 2012. [Google Scholar]
- Chang, X.H.; Wang, Y.M. Peak-to-peak filtering for networked nonlinear DC motor systems with quantization. IEEE Trans. Ind. Inform. 2018, 14, 5378–5388. [Google Scholar] [CrossRef]
- Gupta, H.N. Fundamentals of Internal Combustion Engines; PHI Learning Pvt. Ltd.: New Delhi, India, 2012. [Google Scholar]
- Metghalchi, M.; Keck, J.C. Burning velocities of mixtures of air with methanol, isooctane, and indolene at high pressure and temperature. Combust. Flame 1982, 48, 191–210. [Google Scholar] [CrossRef]
- Colin, O.; Benkenida, A.; Angelberger, C. 3D modeling of mixing, ignition and combustion phenomena in highly stratified gasoline engines. Oil Gas Sci. Technol. 2003, 58, 47–62. [Google Scholar] [CrossRef]
- Crowl, D.A.; Louvar, J.F. Chemical Process Safety: Fundamentals with Applications; Pearson Education: London, UK, 2001. [Google Scholar]
- Zhang, T.; Liao, Y. Attitude measure system based on extended Kalman filter for multi-rotors. Comput. Electron. Agric. 2017, 134, 19–26. [Google Scholar] [CrossRef]
- Helm, S.; Kozek, M.; Jakubek, S. Combustion torque estimation and misfire detection for calibration of combustion engines by parametric Kalman filtering. IEEE Trans. Ind. Electron. 2012, 59, 4326–4337. [Google Scholar] [CrossRef]
- Zhao, J.B.; Netto, M.; Mili, L. A robust iterated extended Kalman filter for power system dynamic state estimation. IEEE Trans. Power Syst. 2017, 32, 3205–3216. [Google Scholar] [CrossRef]
- Al-Durra, A.; Canova, M.; Yurkovich, S. Application of extended Kalman filter to on-line diesel engine cylinder pressure estimation. In Proceedings of the ASME 2009 Dynamic Systems and Control Conference, American Society of Mechanical Engineers, Hollywood, CA, USA, 12–14 October 2009; pp. 541–548. [Google Scholar]
- Cordeiro, T.F.K.; Da Costa, J.P.C.; De Sousa Júnior, R.T.; So, H.C.; Borges, G.A. Improved Kalman-based attitude estimation framework for UAVs via an antenna array. Digit. Signal Process. 2016, 59, 49–65. [Google Scholar] [CrossRef]
- Department of Theoretical Mechanics of Harbin Institute of Technology. Theoretical Mechanics, 7th ed.; Higher Education Press: Beijing, China, 2009; pp. 288–322. [Google Scholar]
- Yu, Z. Automobile Theory; Machinery Industry Press: Beijing, China, 2009. [Google Scholar]
- Yang, Y.; Peng, Z.K.; Dong, X.J.; Zhang, W.M.; Meng, G. General parameterized time-frequency transform. IEEE Trans. Signal Process. 2014, 62, 2751–2764. [Google Scholar] [CrossRef]
- Phillips, C.L.; Parr, J.M.; Riskin, E.A. Signals, Systems, and Transforms; Prentice Hall: Upper Saddle River, UK, 2003. [Google Scholar]
- Waadeland, C.H. Synthesis of asymmetric movement trajectories in timed rhythmic behavior by means of frequency modulation. Hum. Mov. Sci. 2017, 51, 112–124. [Google Scholar] [CrossRef]
- Leclere, Q.; Pezerat, C.; Laulagnet, B.; Polac, L. Application of multi-channel spectral analysis to identify the source of a noise amplitude modulation in a diesel engine operating at idle. Appl. Acoust. 2005, 66, 779–798. [Google Scholar] [CrossRef]
- Payri, F.; Olmeda, P.; Guardiola, C.; Martín, J. Adaptive determination of cut-off frequencies for filtering the in-cylinder pressure in diesel engines combustion analysis. Appl. Therm. Eng. 2011, 31, 2869–2876. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A/F Ratio | Atmosphere Pressure/KPa | Atmosphere Temperature/°C | Valve Opening Value/° | CA BTDC | Fuel Rail Pressure /bar |
|---|---|---|---|---|---|
| 0.85 | 101 | 25 | 30 | 270 | 100 |
| 0.95 | 101 | 25 | 30 | 270 | 90 |
| a0~a6 | a7~a13 | a14~a20 | a21~a24, b1~a3 | b4~b10 | b11~b17 | b18~b24 |
|---|---|---|---|---|---|---|
| 12.06 | −2.639 | 0.324 | 0.3783 | 5.68 | −1.775 | 0.4077 |
| −11.92 | 0.1302 | 0.7365 | −0.3231 | −5.136 | 0.9967 | 0.2995 |
| −3.768 | 1.882 | −0.9149 | −0.0095 | 1.267 | 0.3929 | −0.5088 |
| 9.395 | −1.854 | 0.1323 | 0.257 | 1.927 | −1.146 | 0.2242 |
| −4.813 | 0.2843 | 0.5965 | 13.11 | −2.787 | 0.7361 | 0.202 |
| −1.215 | 1.142 | −0.5427 | −11.71 | 1.365 | 0.291 | −0.3184 |
| 3.652 | −1.264 | −0.00471 | 1.303 | 0.8418 | −0.8235 | 0.1462 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Sun, T.; Lyu, Z.; Gao, D. A Virtual In-Cylinder Pressure Sensor Based on EKF and Frequency-Amplitude-Modulation Fourier-Series Method. Sensors 2019, 19, 3122. https://doi.org/10.3390/s19143122
Wang Q, Sun T, Lyu Z, Gao D. A Virtual In-Cylinder Pressure Sensor Based on EKF and Frequency-Amplitude-Modulation Fourier-Series Method. Sensors. 2019; 19(14):3122. https://doi.org/10.3390/s19143122
Chicago/Turabian StyleWang, Qiming, Tao Sun, Zhichao Lyu, and Dawei Gao. 2019. "A Virtual In-Cylinder Pressure Sensor Based on EKF and Frequency-Amplitude-Modulation Fourier-Series Method" Sensors 19, no. 14: 3122. https://doi.org/10.3390/s19143122
APA StyleWang, Q., Sun, T., Lyu, Z., & Gao, D. (2019). A Virtual In-Cylinder Pressure Sensor Based on EKF and Frequency-Amplitude-Modulation Fourier-Series Method. Sensors, 19(14), 3122. https://doi.org/10.3390/s19143122