A Novel Fault Feature Recognition Method for Time-Varying Signals and Its Application to Planetary Gearbox Fault Diagnosis under Variable Speed Conditions


Abstract
:1. Introduction
- Can the process of estimating and locating all phase functions in GD with only one instantaneous frequency be simplified and achieve similar smooth transformation?
- Can the process be further simplified? For example, can the instantaneous frequency that needs to be estimated be arbitrary?
- Can more intuitive and readable results on the basis of TFR be presented?
- To obtain stable high resolution TFR, an improved multi-synchrosqueezing transform (IMSST) algorithm based on MSST is proposed. According to the intermediate frequency extracted in the first step, the time-varying full frequency can be directly converted into stable full frequency.
- To transform the instantaneous frequency ridges into a series of lines parallel to the frequency axis, we improve the instantaneous frequency estimation operator based on the MSST algorithm, so that we achieve the result which is similar to GD using only an arbitrary extracted IF.
- To present more intuitive and readable results, we propose a simple data dimension reduction method, which generates a more readable two-dimensional (2D) energy-frequency diagram.
- A three-step model is used to enhance readability of the final results.
- The proposed method is validated in multicomponent and planetary gearbox simulation signals in the form of increasing signal complexity.
- The proposed method is applied to diagnose the planetary gearbox fault under a time-varying condition and directly recognize the fault type from the 2D energy-frequency map without using any other method.
2. Theoretical Description
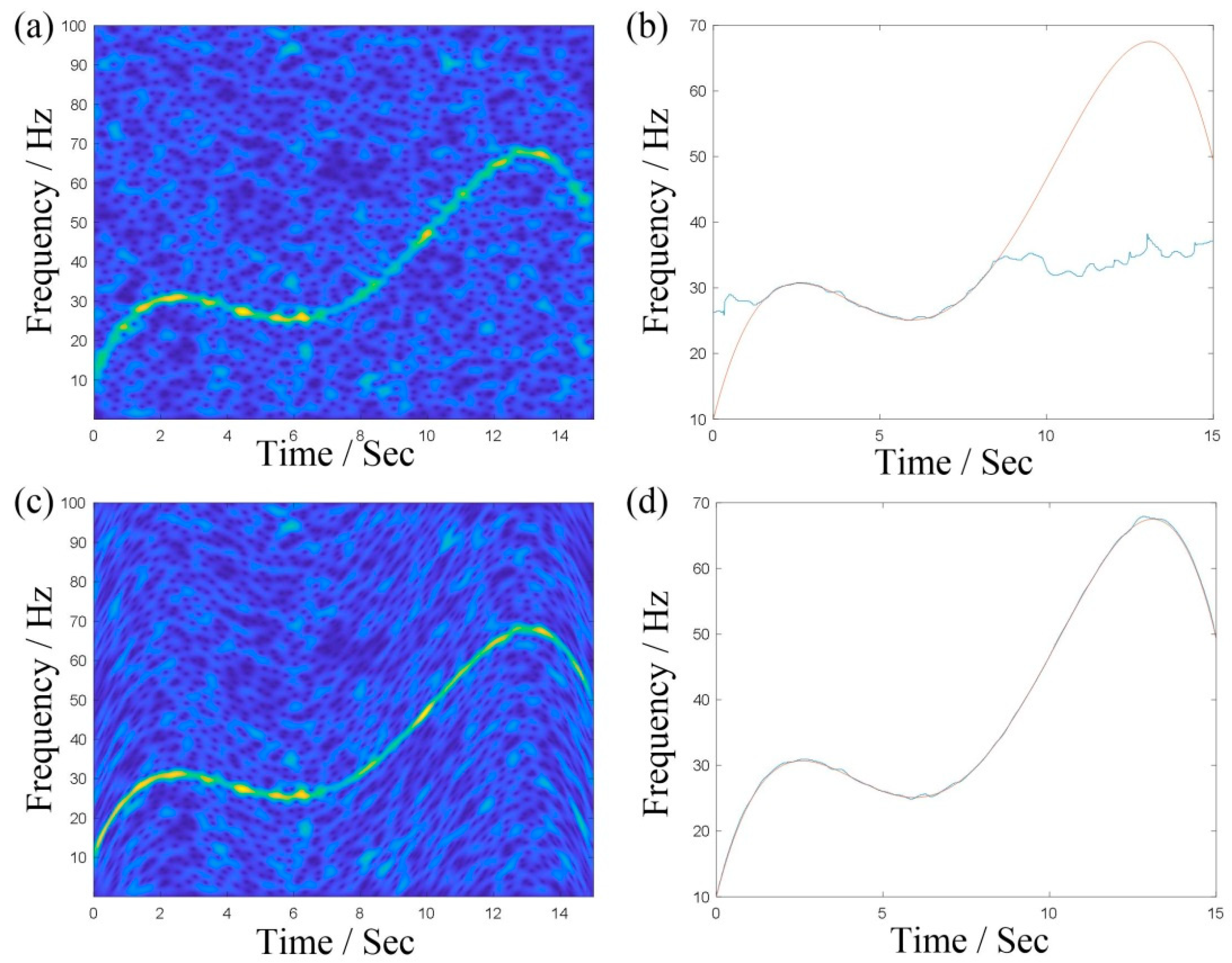
2.1. Extraction Algorithm of IF
| Algorithm 1 TDSTFT |
| Input: |
| Output: |
| 1: Initialize:; the largest number of iterations: ; convergence threshold . |
| 2: Calculate: |
| ; |
| ; |
| ; |
| ; |
| ; |
| ; |
| 3: Iteration: |
| for ; |
| ; |
| ; |
| ; |
| ; |
| ; |
| ; |
| ; |
| if ; |
| breake; |
| end |
| end |
2.2. The TFRs by IMSST
2.3. Two-Dimensional Energy-Frequency Map Obtained by IMSST
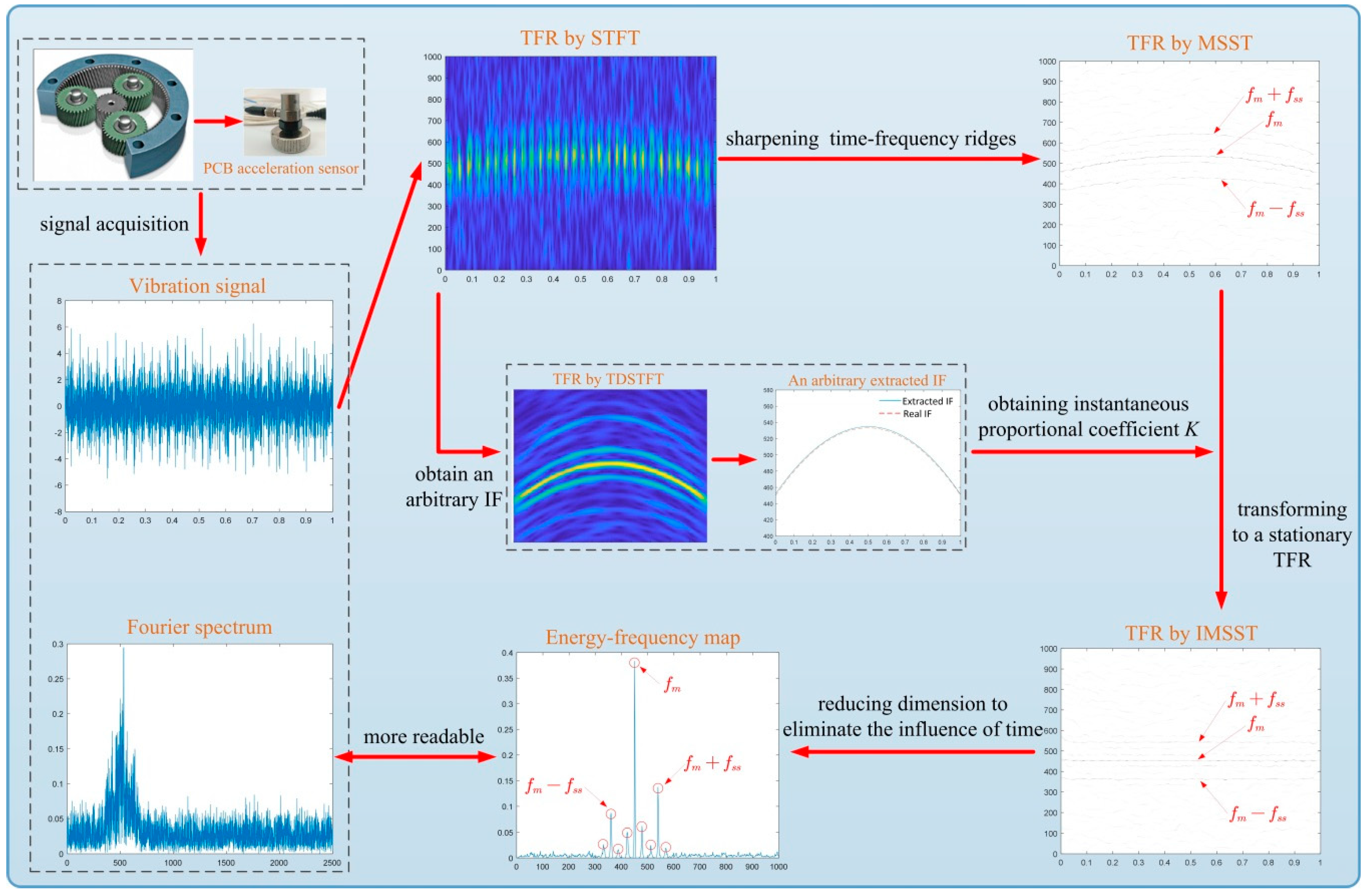
- Apply acceleration sensor to obtain the vibration signal .
- Extract an arbitrary IF from using TDSTFT.
- Calculate the proportionality coefficient according to .
- Obtain the high resolution of TFR using MSST.
- Transforming instantaneous frequency curves to a series of lines which are parallel to the frequency axis according to the proportionality coefficient using IMSST, and then obtaining reconstructed TFR .
- Eliminate the influence of time to obtain which is a result of dimensionality reduction comparing with , and then derive the 2D energy-frequency map.
- Identify the fault pattern using the 2D energy-frequency map.
3. Simulation Validation
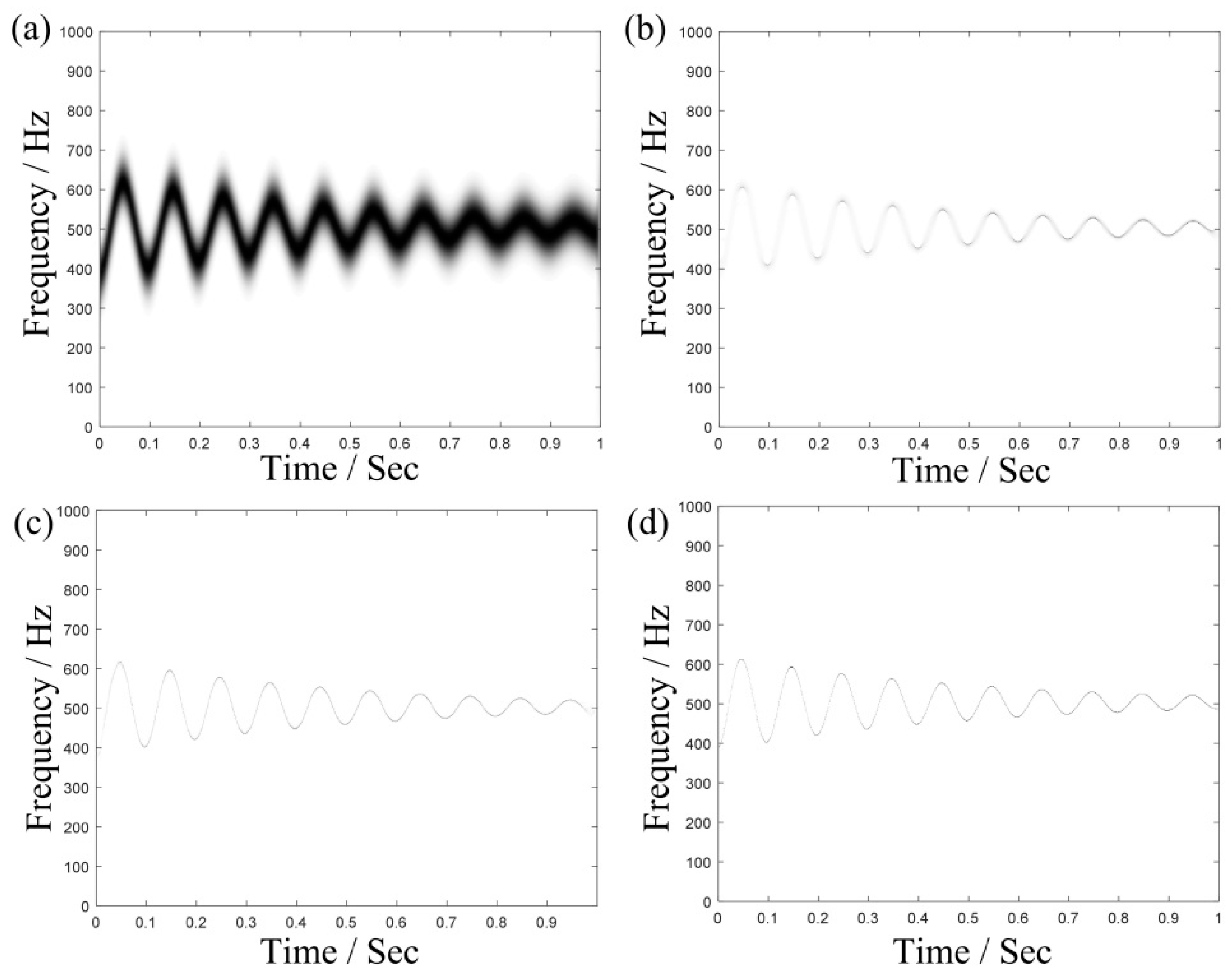
3.1. Multicomponent Signal
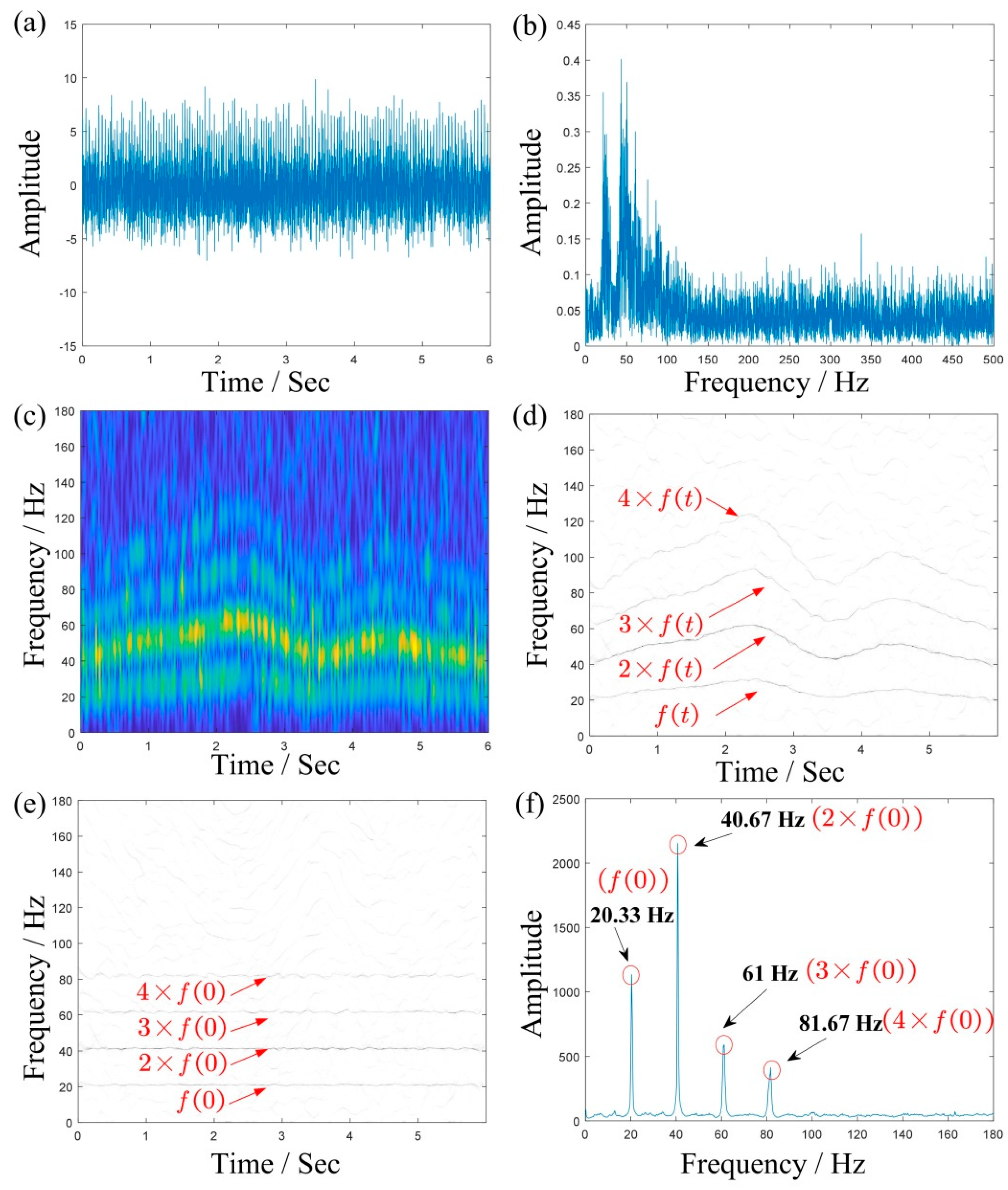
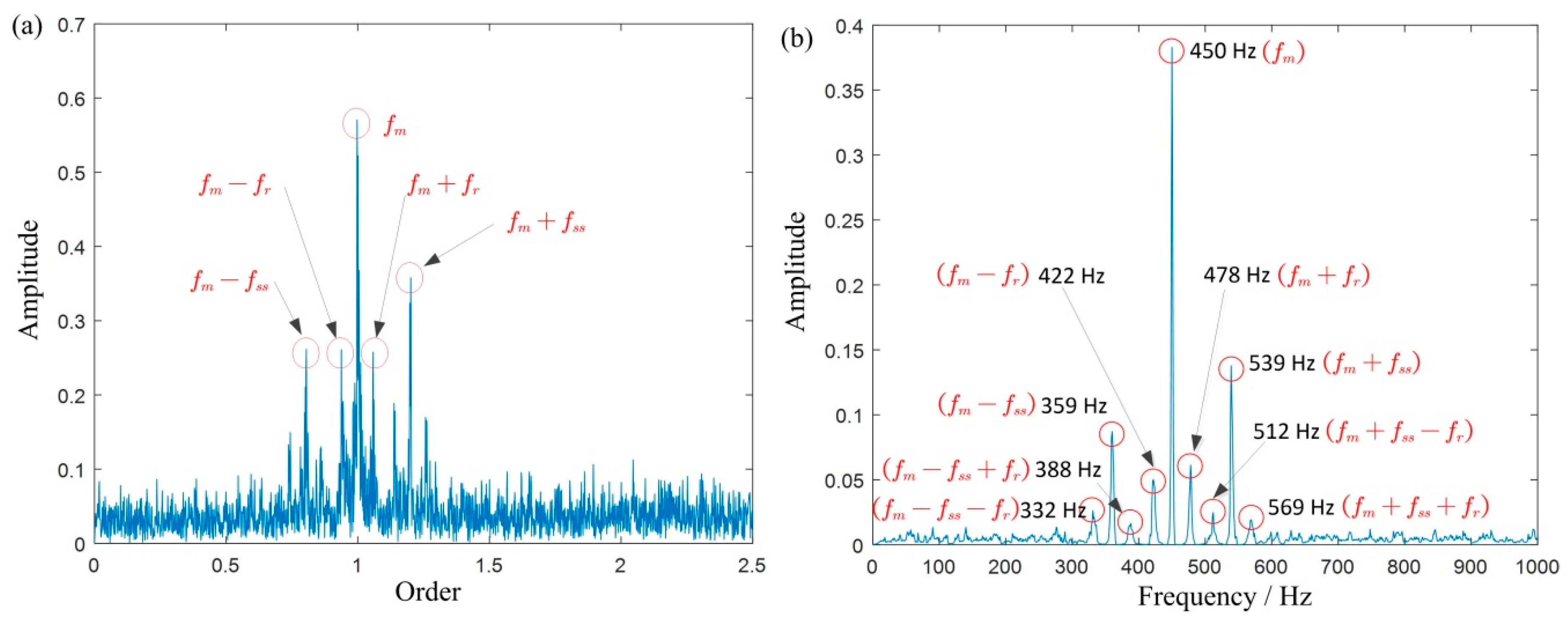
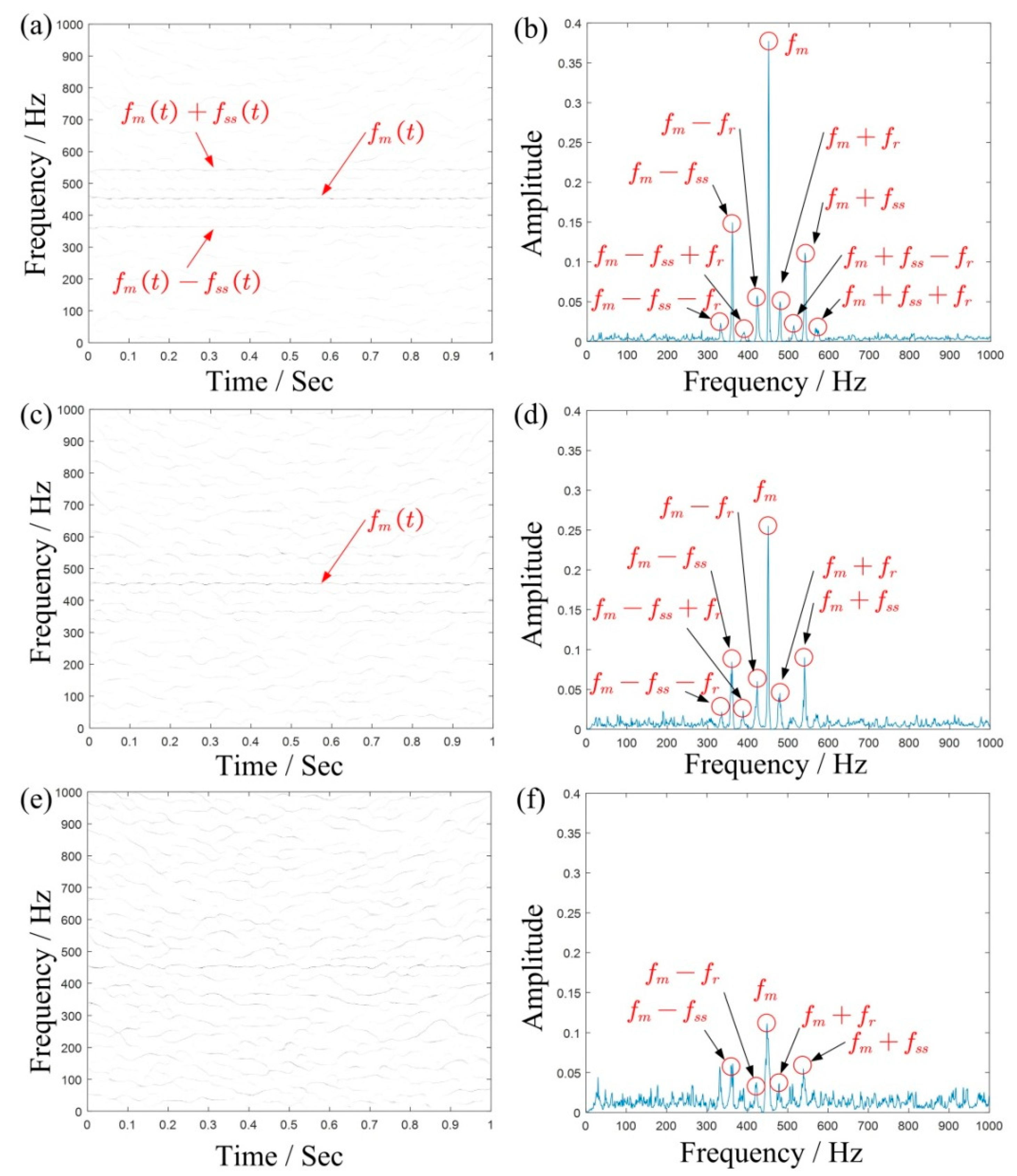
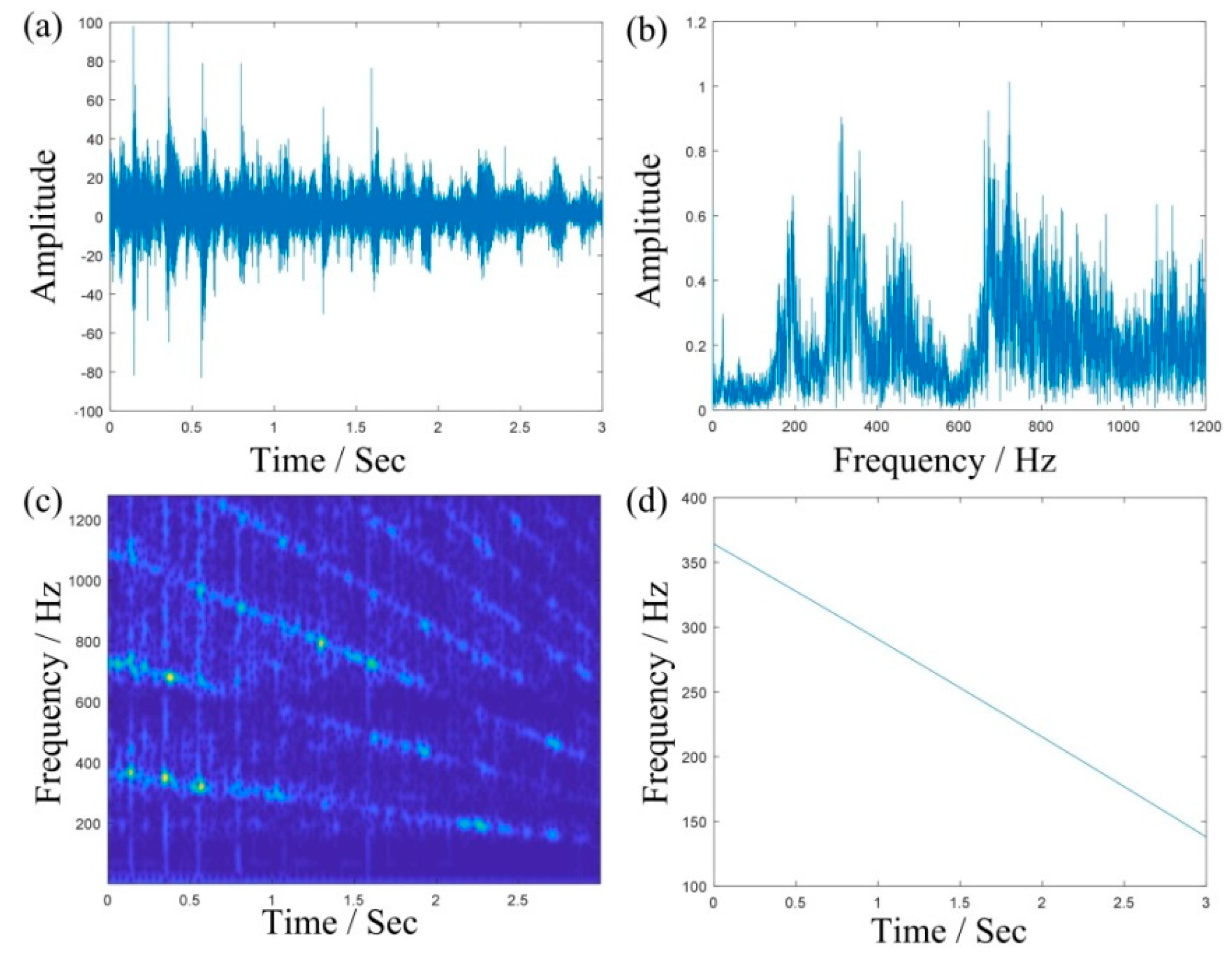
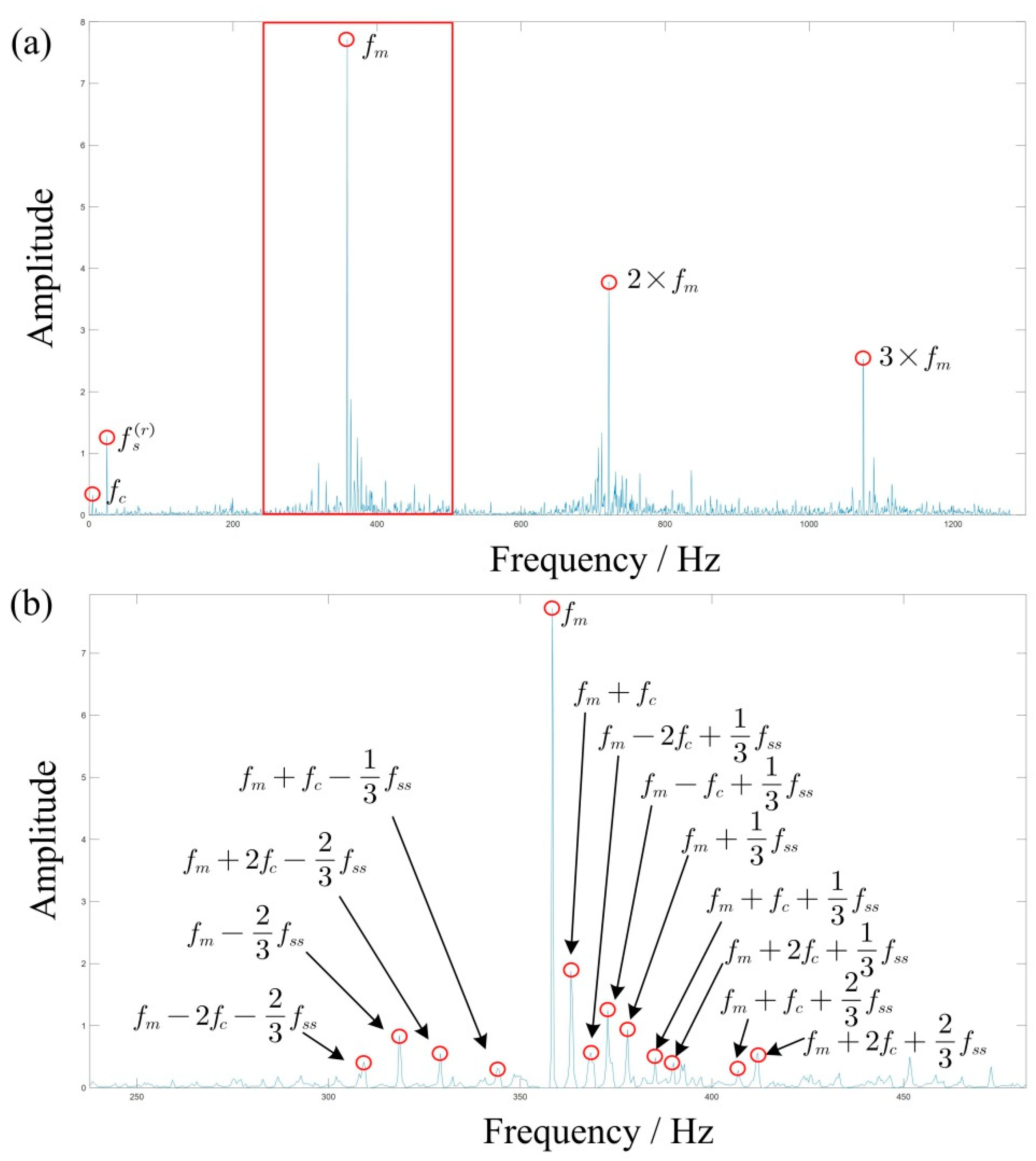
3.2. The Simulated Planetary Gear Signal under Time-Varying Rotating Speed
4. Experimental Validation
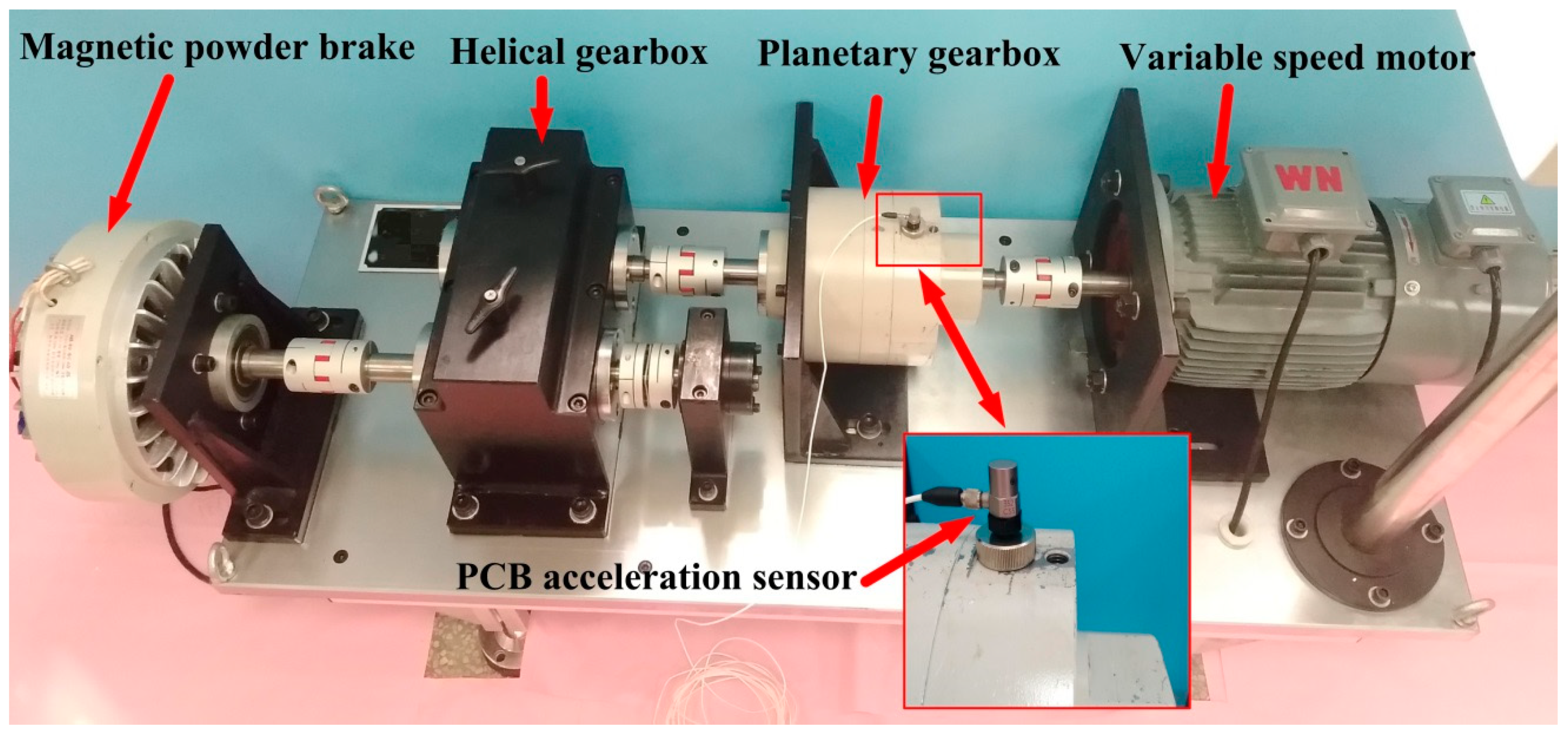
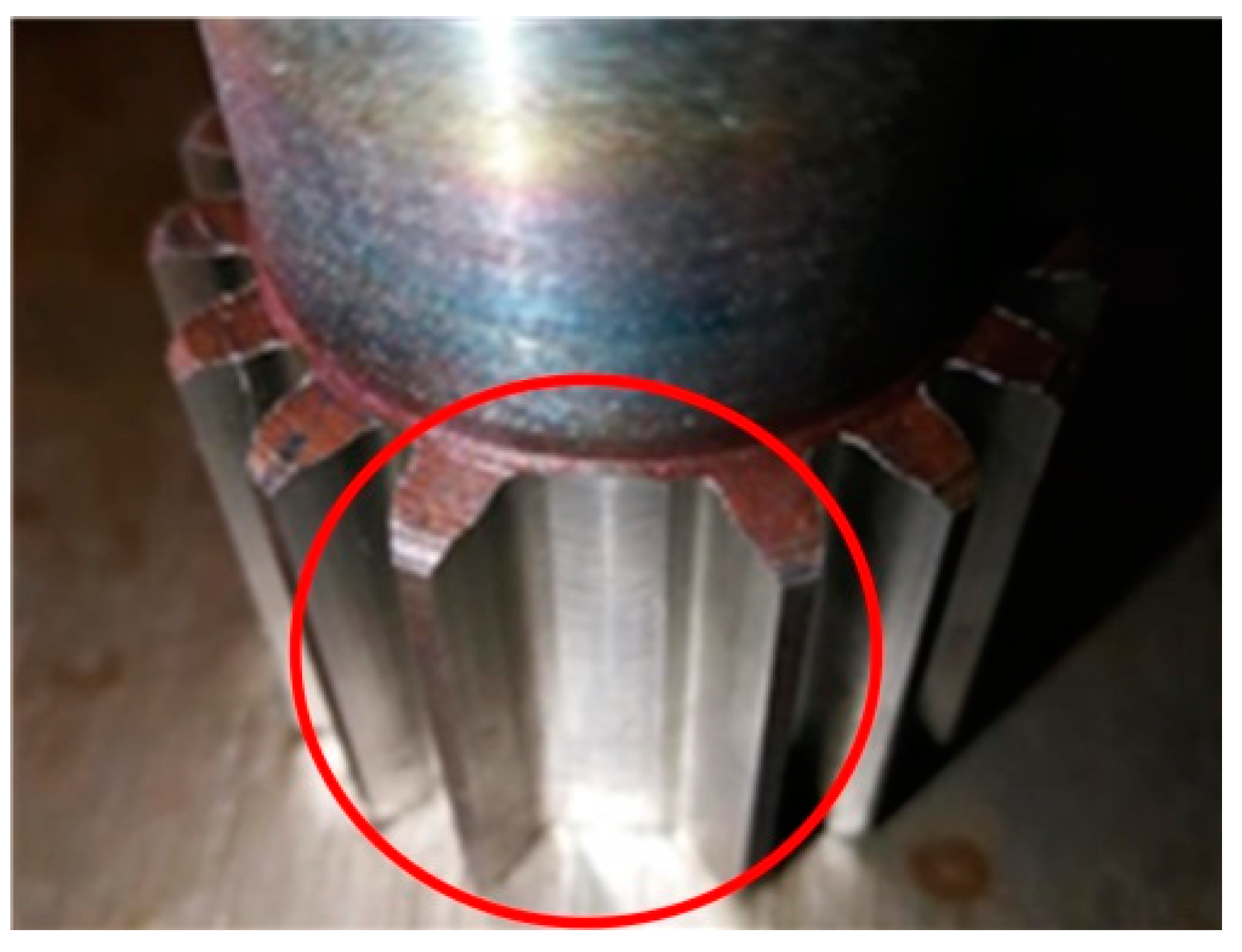
4.1. Experimental Rig
4.2. Result Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, B.; Zhang, Z.; Hua, X.; Basu, B.; Nielsen, S.R. Identification of aerodynamic damping in wind turbines using time-frequency analysis. Mech. Syst. Signal Process. 2017, 91, 198–214. [Google Scholar] [CrossRef] [Green Version]
- Yi, C.; Lv, Y.; Dang, Z.; Xiao, H.; Yu, X. Quaternion singular spectrum analysis using convex optimization and its application to fault diagnosis of rolling bearing. Measurement 2017, 103, 321–332. [Google Scholar] [CrossRef]
- Lv, Y.; Yuan, R.; Wang, T.; Li, H.; Song, G. Health degradation monitoring and early fault diagnosis of a rolling bearing based on CEEMDAN and improved MMSE. Materials 2018, 11, 1009. [Google Scholar] [CrossRef] [PubMed]
- Yi, C.; Lv, Y.; Ge, M.; Xiao, H.; Yu, X. Tensor singular spectrum decomposition algorithm based on permutation entropy for rolling bearing fault diagnosis. Entropy 2017, 19, 139. [Google Scholar] [CrossRef]
- Qiao, W.; Lu, D. A Survey on Wind Turbine Condition Monitoring and Fault Diagnosis—Part II: Signals and Signal Processing Methods. IEEE Trans. Ind. Electron. 2015, 62, 6546–6557. [Google Scholar] [CrossRef]
- Tu, X.; Hu, Y.; Li, F.; Abbas, S.; Liu, Z.; Bao, W. Demodulated High-Order Synchrosqueezing Transform With Application to Machine Fault Diagnosis. IEEE Trans. Ind. Electron. 2019, 66, 3071–3081. [Google Scholar] [CrossRef]
- Feng, Z.; Chu, F.; Zuo, M.J. Time–frequency analysis of time-varying modulated signals based on improved energy separation by iterative generalized demodulation. J. Sound Vib. 2011, 330, 1225–1243. [Google Scholar] [CrossRef]
- Huang, H.; Baddour, N.; Liang, M. Bearing fault diagnosis under unknown time-varying rotational speed conditions via multiple time-frequency curve extraction. J. Sound Vib. 2018, 414, 43–60. [Google Scholar] [CrossRef]
- Chen, S.; Yang, Y.; Wei, K.; Dong, X.; Peng, Z.; Zhang, W. Time-varying frequency-modulated component extraction based on parameterized demodulation and singular value decomposition. IEEE Trans. Instrum. Meas. 2016, 65, 276–285. [Google Scholar] [CrossRef]
- Liu, D.; Cheng, W.; Wen, W. Rolling Bearing Fault Diagnosis via ConceFT-Based Time-Frequency Reconfiguration Order Spectrum Analysis. IEEE Access 2018, 6, 67131–67143. [Google Scholar] [CrossRef]
- Kwok, H.K.; Jones, D.L. Improved instantaneous frequency estimation using an adaptive short-time Fourier transform. IEEE Trans. Signal Process. 2000, 48, 2964–2972. [Google Scholar] [CrossRef]
- Ta, R.; Li, Y.L.; Wang, Y. Short-time fractional Fourier transform and its applications. IEEE Trans. Signal Process. 2010, 58, 2568–2580. [Google Scholar] [CrossRef]
- Hyvärinen, A.; Ramkumar, P.; Parkkonen, L.; Hari, R. Independent component analysis of short-time Fourier transforms for spontaneous EEG/MEG analysis. NeuroImage 2010, 49, 257–271. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Cao, S.; Chen, Y. Seismic Time-Frequency Analysis via Empirical Wavelet Transform. IEEE Geosci. Remote Sens. Lett. 2016, 13, 28–32. [Google Scholar] [CrossRef]
- Jaganathan, K.; Eldar, Y.C.; Hassibi, B. Recovering signals from the short-time Fourier transform magnitude. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, QLD, Australia, 19–24 April 2015; pp. 3277–3281. [Google Scholar]
- Yu, G.; Wang, Z.; Zhao, P.; Zhen, L. Local maximum synchrosqueezing transform: an energy-concentrated time-frequency analysis tool. Mech. Syst. Sig. Process. 2019, 117, 537–552. [Google Scholar] [CrossRef]
- Kalyani, A.; Pachori, R.B. Cross-Terms Free Time-Frequency Representation Using Empirical Wavelet Transform and Wigner-Ville Distribution. Ph.D. Thesis, Discipline of Electrical Engineering, IIT Indore, West Bengal, India, 2018. [Google Scholar]
- Pachori, R.B.; Nishad, A. Cross-terms reduction in the Wigner–Ville distribution using tunable-Q wavelet transform. Signal Process. 2016, 120, 288–304. [Google Scholar] [CrossRef]
- Canal, M.R. Comparison of Wavelet and Short Time Fourier Transform Methods in the Analysis of EMG Signals. J. Med. Syst. 2010, 34, 91–94. [Google Scholar] [CrossRef]
- Daubechies, I.; Lu, J.; Wu, H.T. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harm. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef] [Green Version]
- Thakur, G.; Wu, H.T. Synchrosqueezing-based recovery of instantaneous frequency from nonuniform samples. SIAM J. Math. Anal. 2011, 43, 2078–2095. [Google Scholar] [CrossRef]
- Li, C.; Liang, M. Time–frequency signal analysis for gearbox fault diagnosis using a generalized synchrosqueezing transform. Mech. Syst. Signal Process. 2012, 26, 205–217. [Google Scholar] [CrossRef]
- Feng, Z.; Chen, X.; Liang, M. Iterative generalized synchrosqueezing transform for fault diagnosis of wind turbine planetary gearbox under nonstationary conditions. Mech. Syst. Signal Process. 2015, 52, 360–375. [Google Scholar] [CrossRef]
- Fourer, D.; Auger, F.; Czarnecki, K.; Meignen, S.; Flandrin, P. Chirp Rate and Instantaneous Frequency Estimation: Application to Recursive Vertical Synchrosqueezing. IEEE Signal Process. Lett. 2017, 24, 1724–1728. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, X.; Wang, S.; Sun, R.; Zhao, Z. Wind Turbine Diagnosis under Variable Speed Conditions Using a Single Sensor Based on the Synchrosqueezing Transform Method. Sensors 2017, 17, 1149. [Google Scholar] [Green Version]
- Pham, D.H.; Meignen, S. High-Order Synchrosqueezing Transform for Multicomponent Signals Analysis-With an Application to Gravitational-Wave Signal. IEEE Trans. Signal Process. 2017, 65, 3168–3178. [Google Scholar] [CrossRef]
- Yu, G.; Wang, Z.; Zhao, P. Multi-synchrosqueezing Transform. IEEE Trans. Ind. Electron. 2018, 66, 5441–5455. [Google Scholar] [CrossRef]
- Li, C.; Liang, M. A generalized synchrosqueezing transform for enhancing signal time–frequency representation. Signal Process. 2012, 92, 2264–2274. [Google Scholar] [CrossRef]
- Shi, J.; Liang, M.; Necsulescu, D.S.; Guan, Y. Generalized stepwise demodulation transform and synchrosqueezing for time–frequency analysis and bearing fault diagnosis. J. Sound Vib. 2016, 368, 202–222. [Google Scholar] [CrossRef]
- Li, C.; Sanchez, V.; Zurita, G.; Lozada, M.C.; Cabrera, D. Rolling element bearing defect detection using the generalized synchrosqueezing transform guided by time–frequency ridge enhancement. ISA Trans. 2016, 60, 274–284. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Burriel-Valencia, J.; Pineda-Sanchez, M.; Puche-Panadero, R.; Riera-Guasp, M. The harmonic order tracking analysis method for the fault diagnosis in induction motors under time-varying conditions. IEEE Trans. Energy Convers. 2017, 32, 244–256. [Google Scholar] [CrossRef]
- Hu, Y.; Tu, X.; Li, F.; Meng, G. Joint high-order synchrosqueezing transform and multi-taper empirical wavelet transform for fault diagnosis of wind turbine planetary gearbox under nonstationary conditions. Sensors 2018, 18, 150. [Google Scholar] [CrossRef]
- Yu, G.; Zhou, Y. General linear chirplet transform. Mech. Syst. Signal Process. 2016, 70, 958–973. [Google Scholar] [CrossRef]
- Sheu, Y.L.; Hsu, L.Y.; Chou, P.T.; Wu, H.T. Entropy-based time-varying window width selection for nonlinear-type time–frequency analysis. Int. J. Data Sci. Anal. 2017, 3, 231–245. [Google Scholar] [CrossRef]
- Guan, Y.; Liang, M.; Necsulescu, D.S. A velocity synchrosqueezing transform for fault diagnosis of planetary gearboxes under nonstationary conditions. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 2868–2884. [Google Scholar] [CrossRef]
- Feng, Z.; Zuo, M.J. Vibration signal models for fault diagnosis of planetary gearboxes. J. Sound Vib. 2012, 331, 4919–4939. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TFA | STFT | SST | 4-SST | |
|---|---|---|---|---|
| Renyi entropy | 19.1162 | 15.3511 | 13.5911 | 12.0610 |
| 1 | 0.05 | 0 | 0 | 0 | −1 dB |
| Gear | Sun Gear | Planet Gear | Ring Gear |
|---|---|---|---|
| Number of Gear teeth | 18 | 27 (3) | 72 |
| Gear Meshing Frequency | Absolute Rotating Frequency | Fault Characteristic Frequency | |||
|---|---|---|---|---|---|
| Sun Gear | Planet Carrier | Sun Gear | Planet Gear | Ring Gear | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Y.; Pan, B.; Yi, C.; Ma, Y. A Novel Fault Feature Recognition Method for Time-Varying Signals and Its Application to Planetary Gearbox Fault Diagnosis under Variable Speed Conditions. Sensors 2019, 19, 3154. https://doi.org/10.3390/s19143154
Lv Y, Pan B, Yi C, Ma Y. A Novel Fault Feature Recognition Method for Time-Varying Signals and Its Application to Planetary Gearbox Fault Diagnosis under Variable Speed Conditions. Sensors. 2019; 19(14):3154. https://doi.org/10.3390/s19143154
Chicago/Turabian StyleLv, Yong, Bingqi Pan, Cancan Yi, and Yubo Ma. 2019. "A Novel Fault Feature Recognition Method for Time-Varying Signals and Its Application to Planetary Gearbox Fault Diagnosis under Variable Speed Conditions" Sensors 19, no. 14: 3154. https://doi.org/10.3390/s19143154
APA StyleLv, Y., Pan, B., Yi, C., & Ma, Y. (2019). A Novel Fault Feature Recognition Method for Time-Varying Signals and Its Application to Planetary Gearbox Fault Diagnosis under Variable Speed Conditions. Sensors, 19(14), 3154. https://doi.org/10.3390/s19143154