Reliable and Fast Localization in Ambiguous Environments Using Ambiguity Grid Map


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
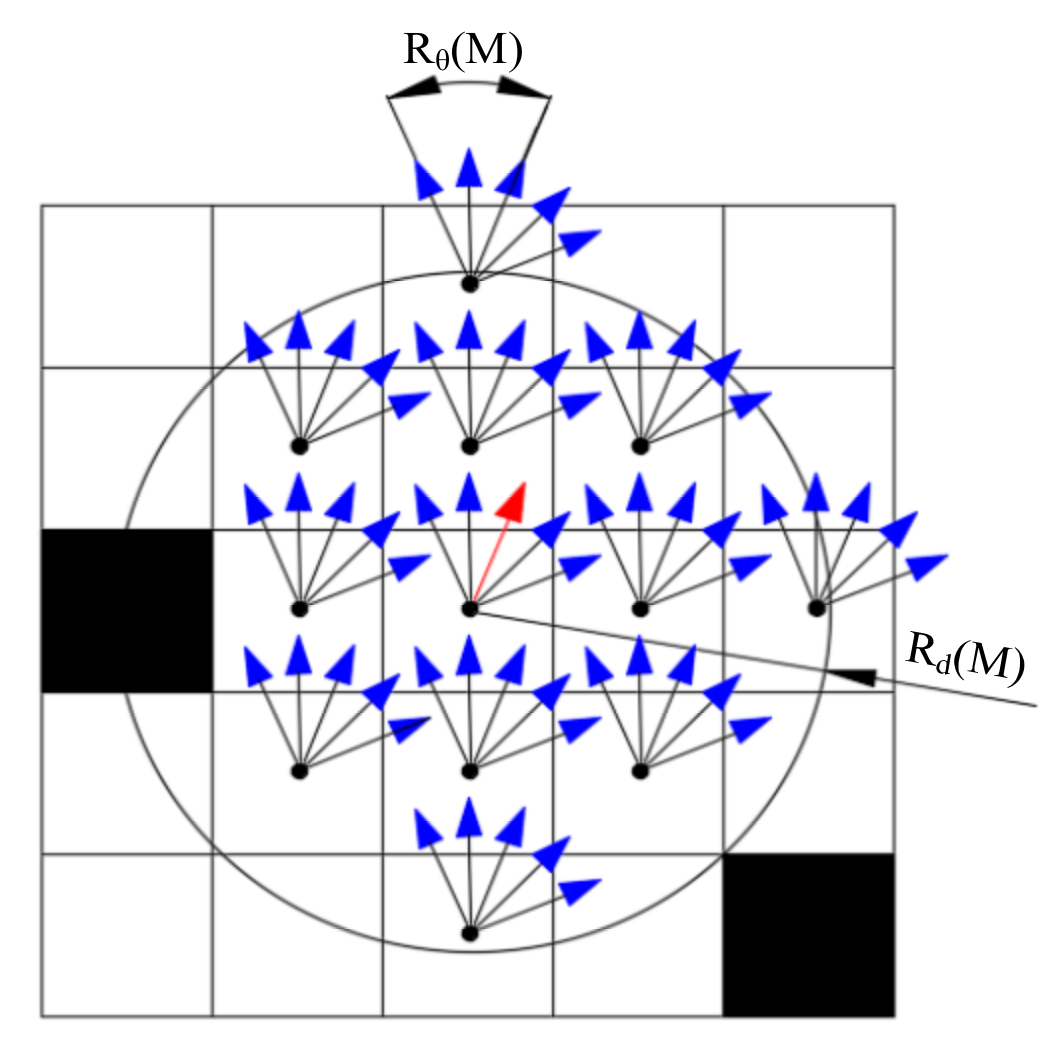
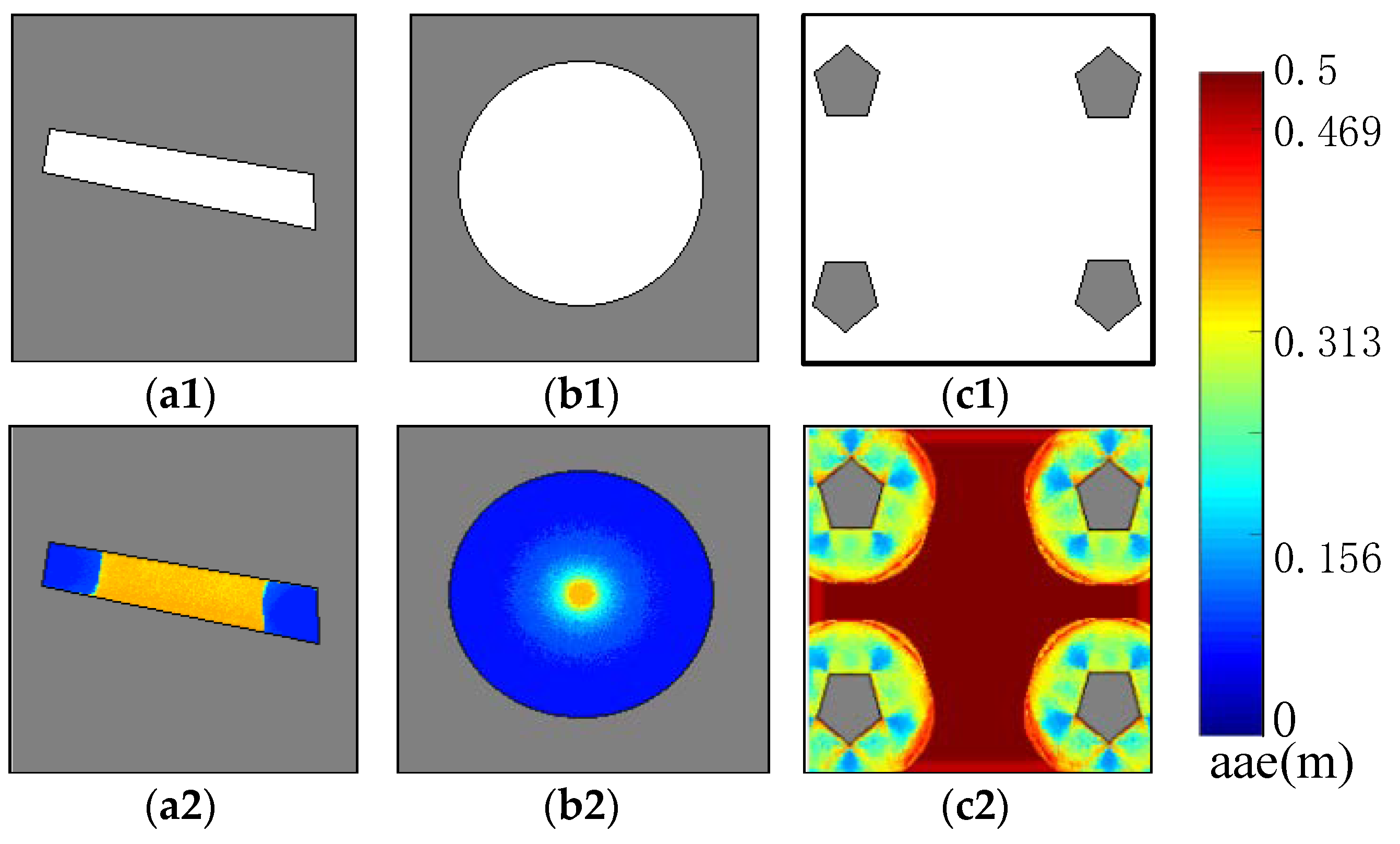
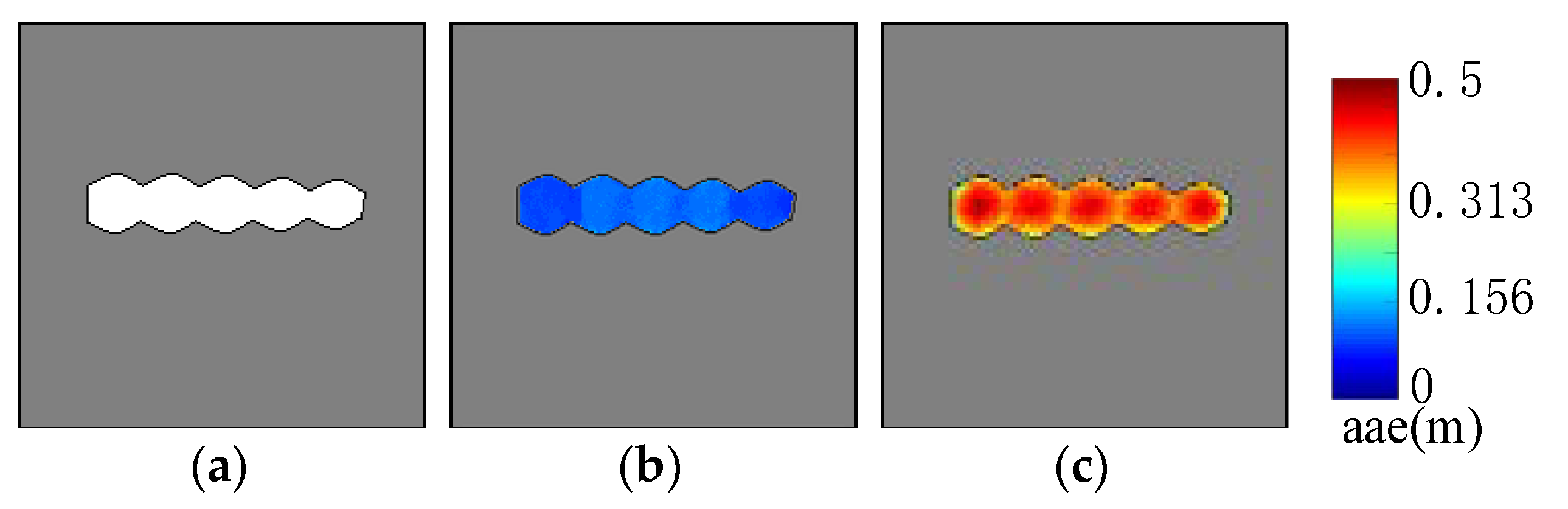
- The AGM is achieved by proposing a new localizability evaluation method called average ambiguity error (AAE) so that the possible localization error at a given pose can be estimated, and those unambiguous areas of an environment can be identified.
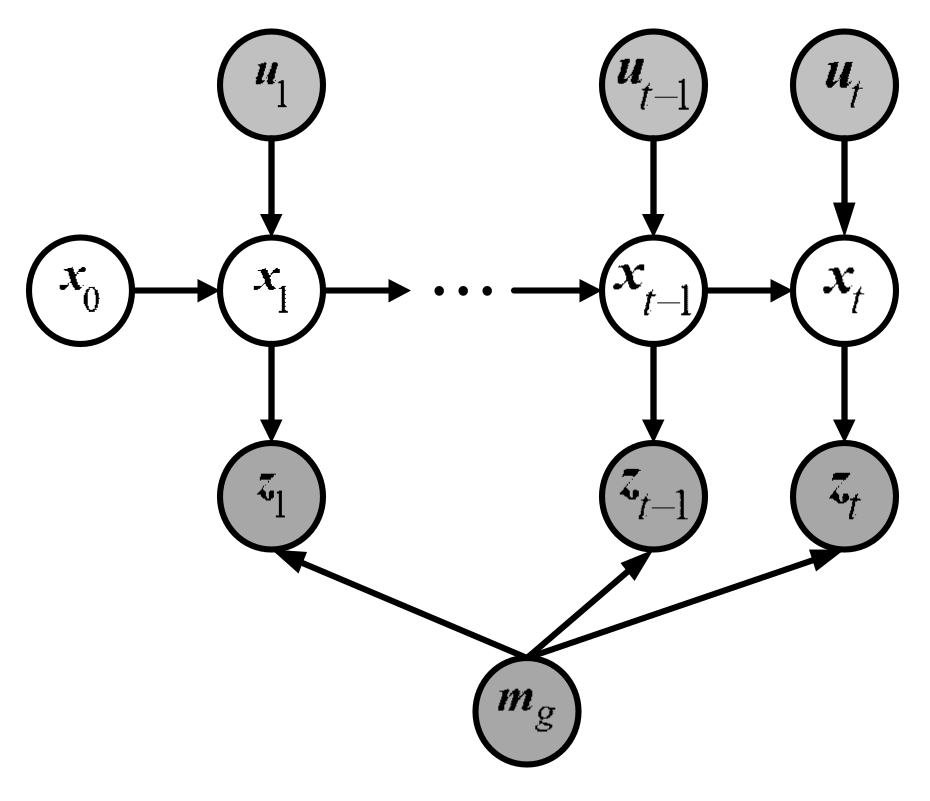
- By integrating the AGM, the standard Dynamic Bayes network (DBN) for robot localization is improved to model the localization problem in ambiguous environments. Moreover, a new motion model referred to as portal motion model is implemented to obtain more reliable pose prediction in ambiguous areas.
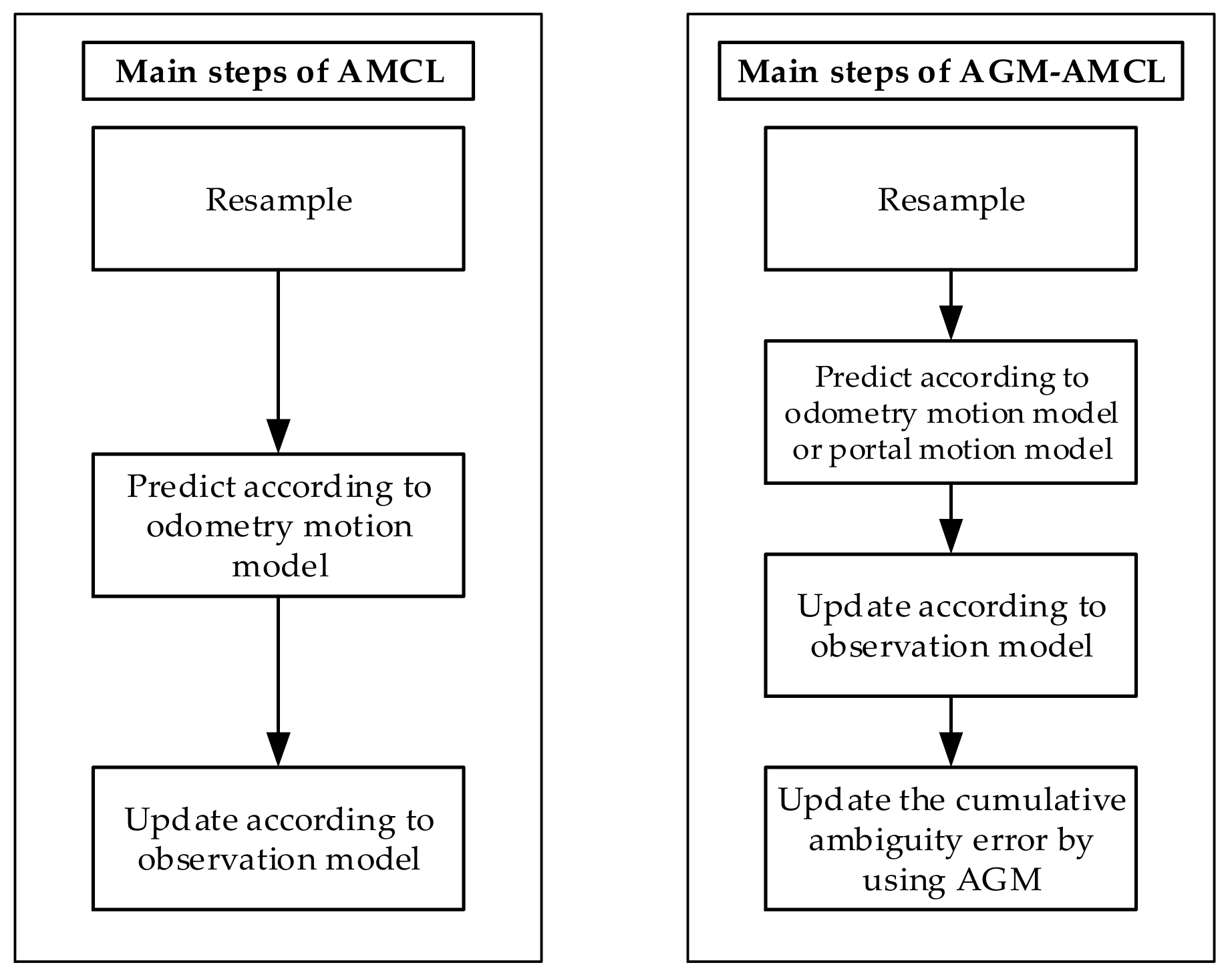
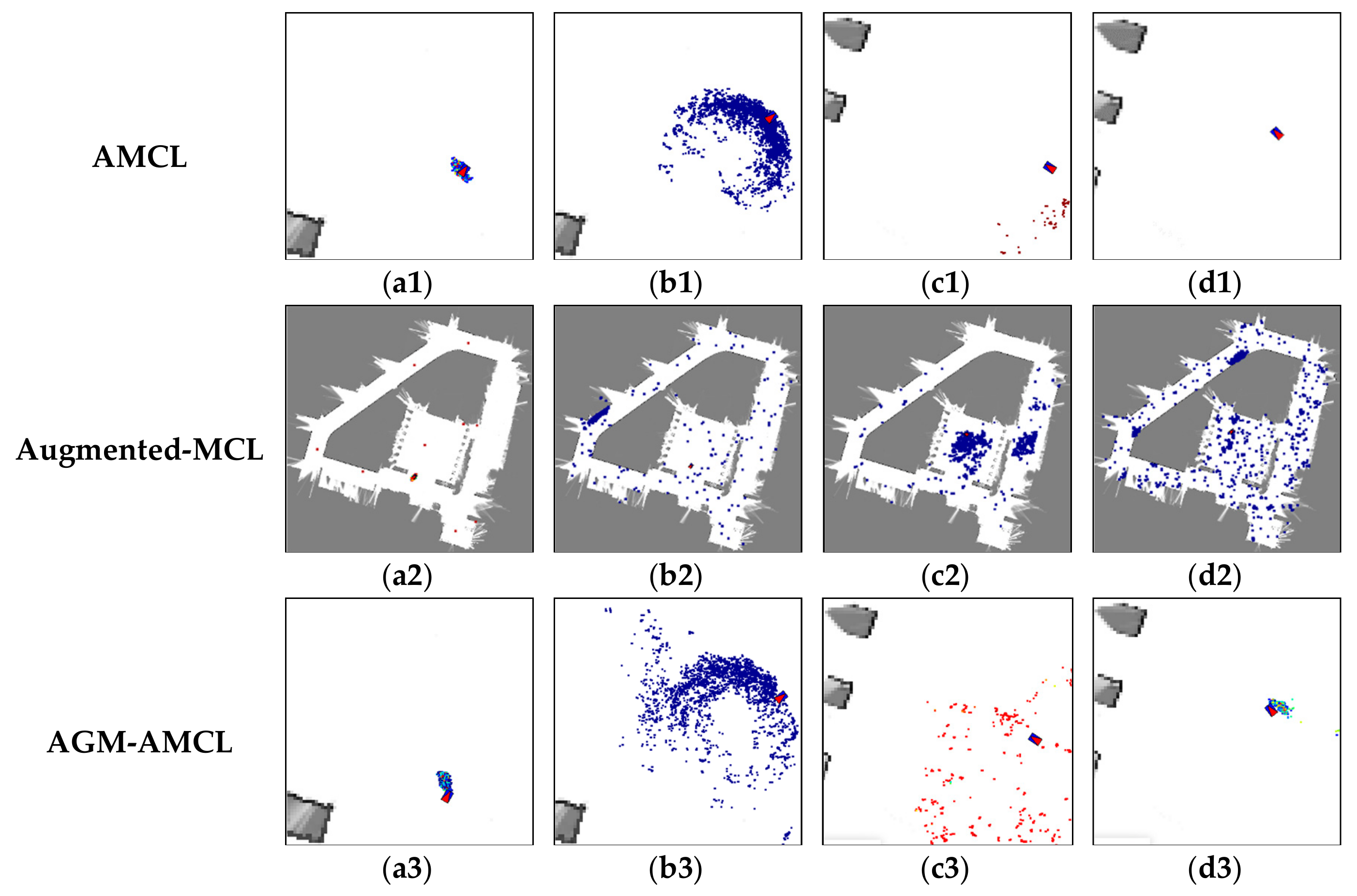
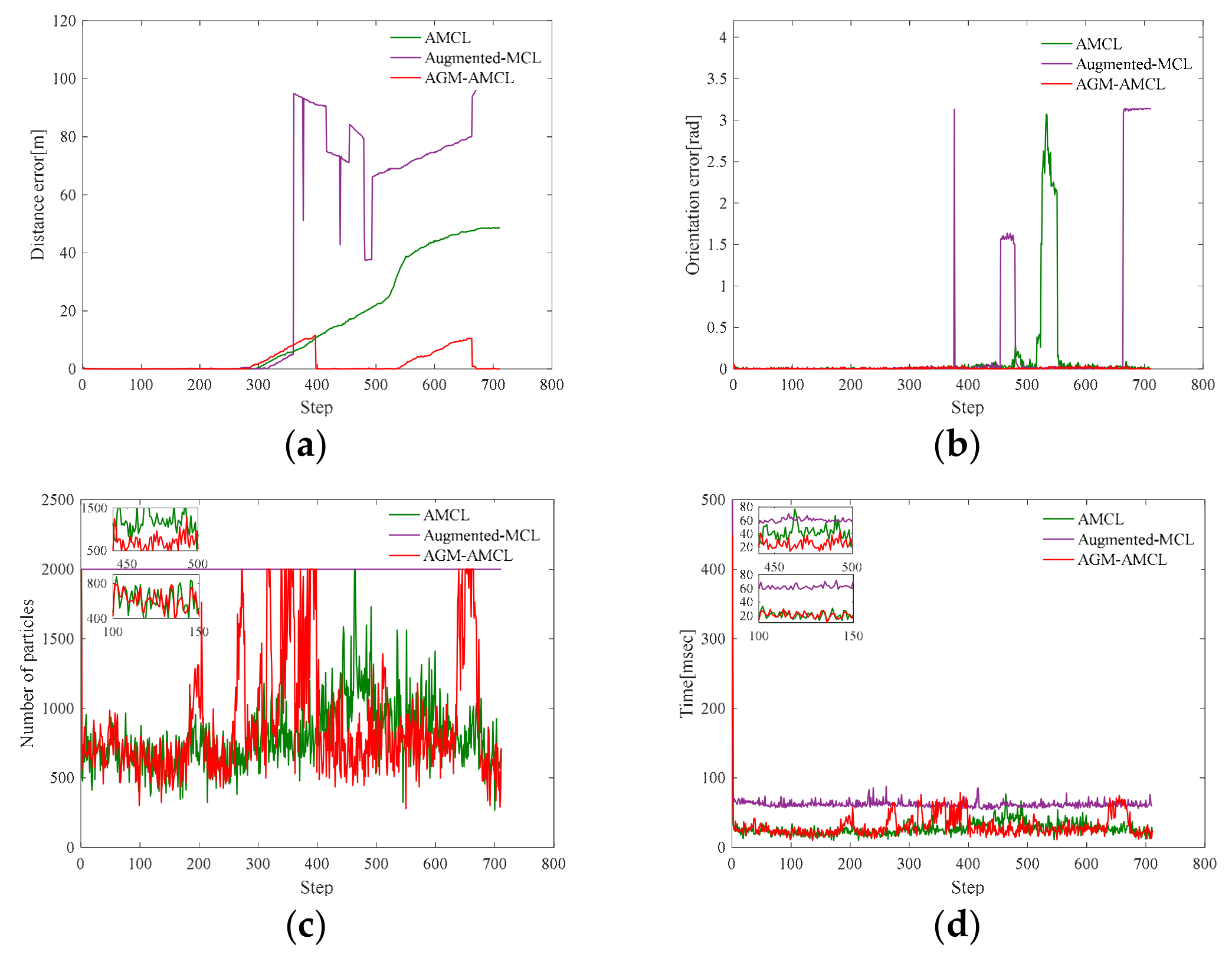
- Based on the improved DBN, the AGM-based adaptive Monte Carlo localization (AGM-AMCL) method is derived to achieve fast probability inference.
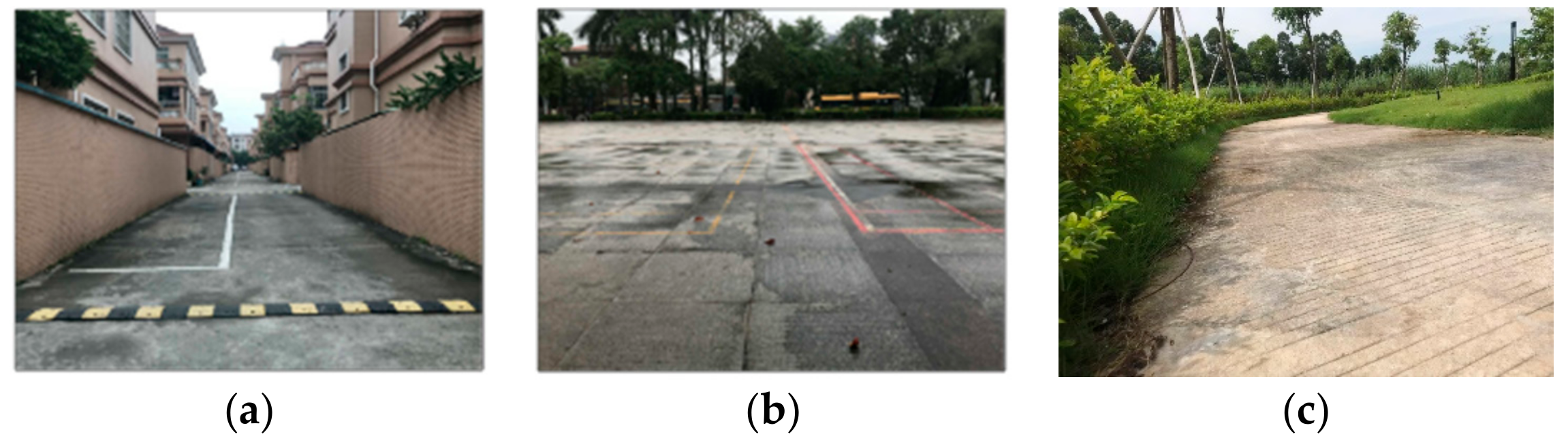
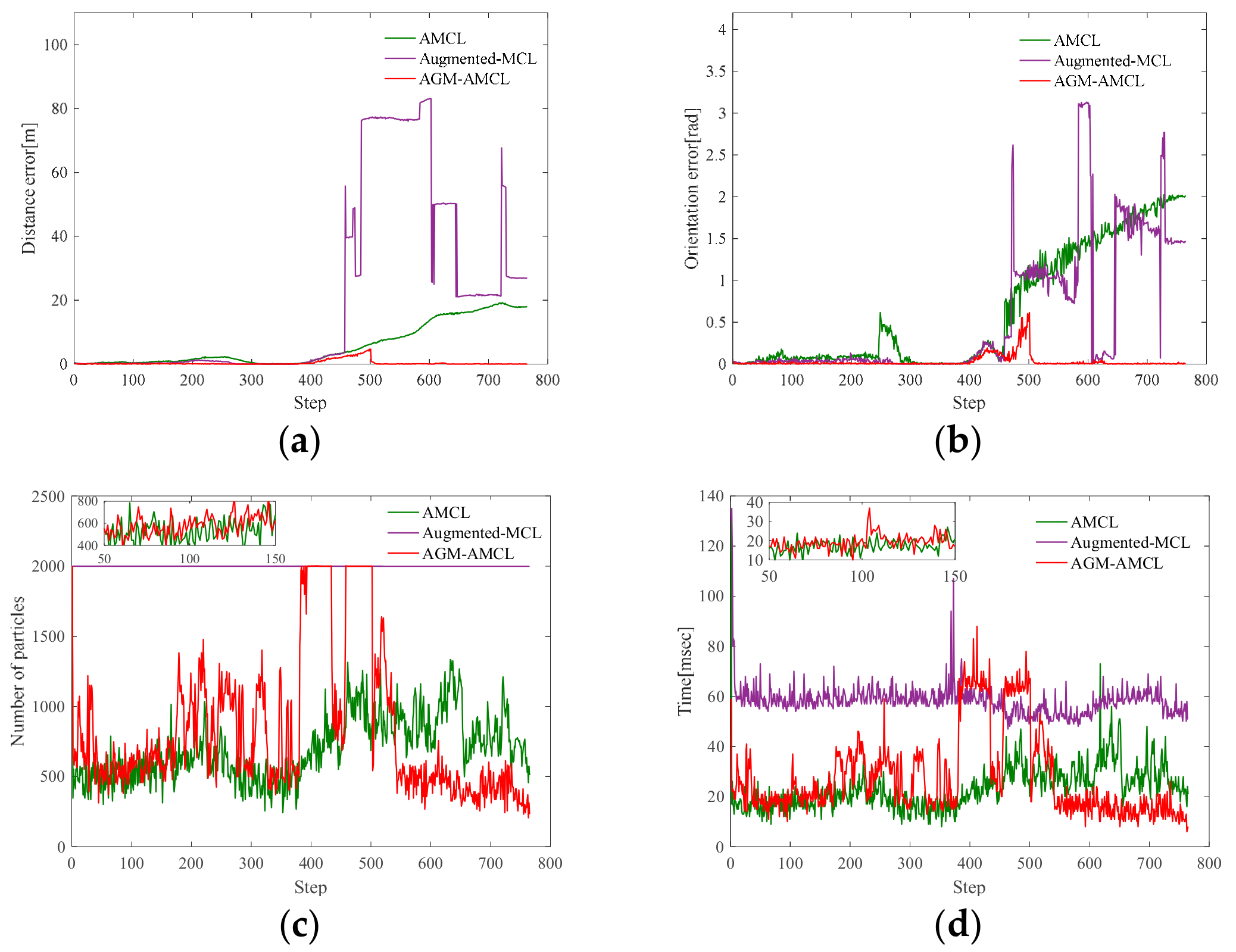
- Simulation and real-world experiments validate the effectiveness of the AGM and the AGM-AMCL method, which can reliably locate a robot with guaranteed efficiency in three different ambiguous environments.
2. Related Work
2.1. Localizability Evaluation
2.2. Reliable Localization
3. AGM
4. AGM-AMCL
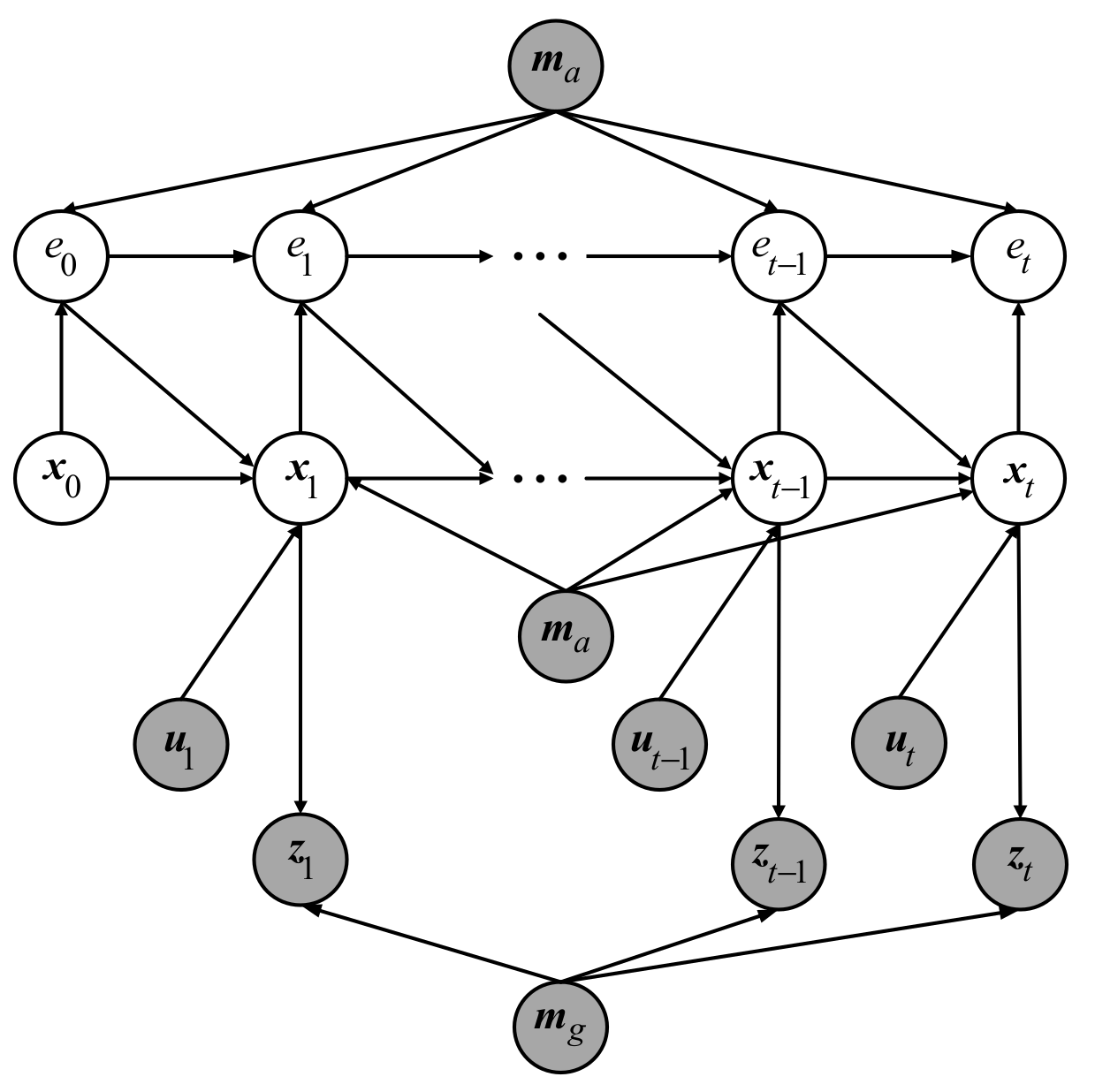
4.1. Standard DBN for Localization
4.2. Improved DBN
4.3. Portal Motion Model for Improved DBN
4.4. AGM-AMCL Implementation
| Algorithm 1 AGM-AMCL |
| Input: |
| Output: |
| 1: // Initialization |
| 2: //For storing RAYCAST result |
| 3: for do //Initialize |
| 4: |
| 5: end for |
| 6: do |
| 7: //Resampling according to particle weight |
| 8: |
| 9: if then |
| 10: |
| 11: |
| 12: else |
| 13: |
| 14: end if |
| 15: |
| 16: sample according to Bernoulli_Distribution( ) |
| 17: if |
| 18: |
| 19: Create according to |
| 20: Sample according to |
| 21: else |
| 22: Sample according to |
| 23: end if |
| 24: |
| 25: //Compute weight according to observation |
| 26: |
| 27: |
| 28: |
| 29: |
| 30: while and |
| 31: for do //Normalize particle weight |
| 32: |
| 33: end for |
| 34: return |
5. Experiments and Results
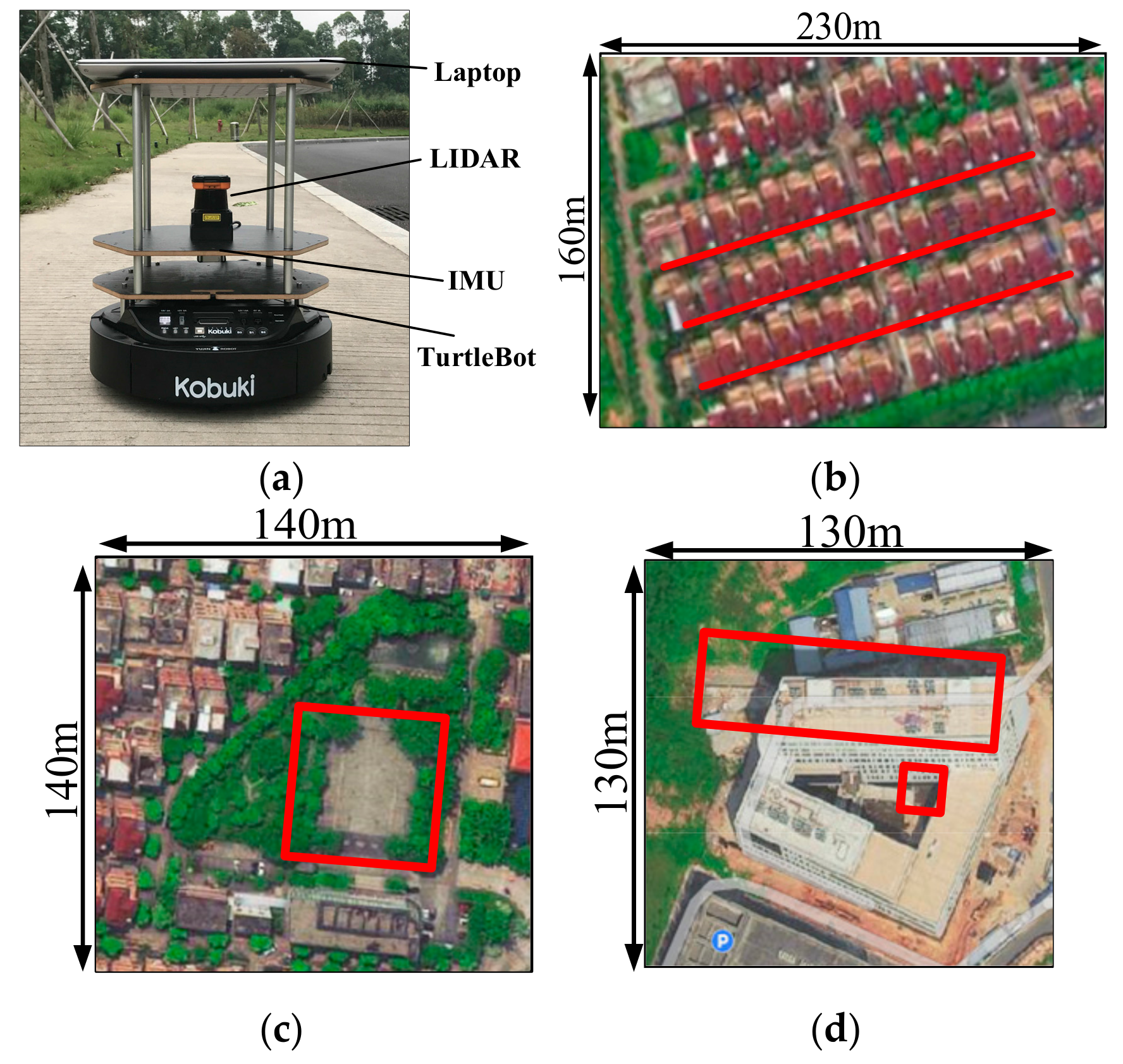
5.1. Platform and Environments
5.2. AGM of Artificial Environments
5.3. AGM of Real Environments
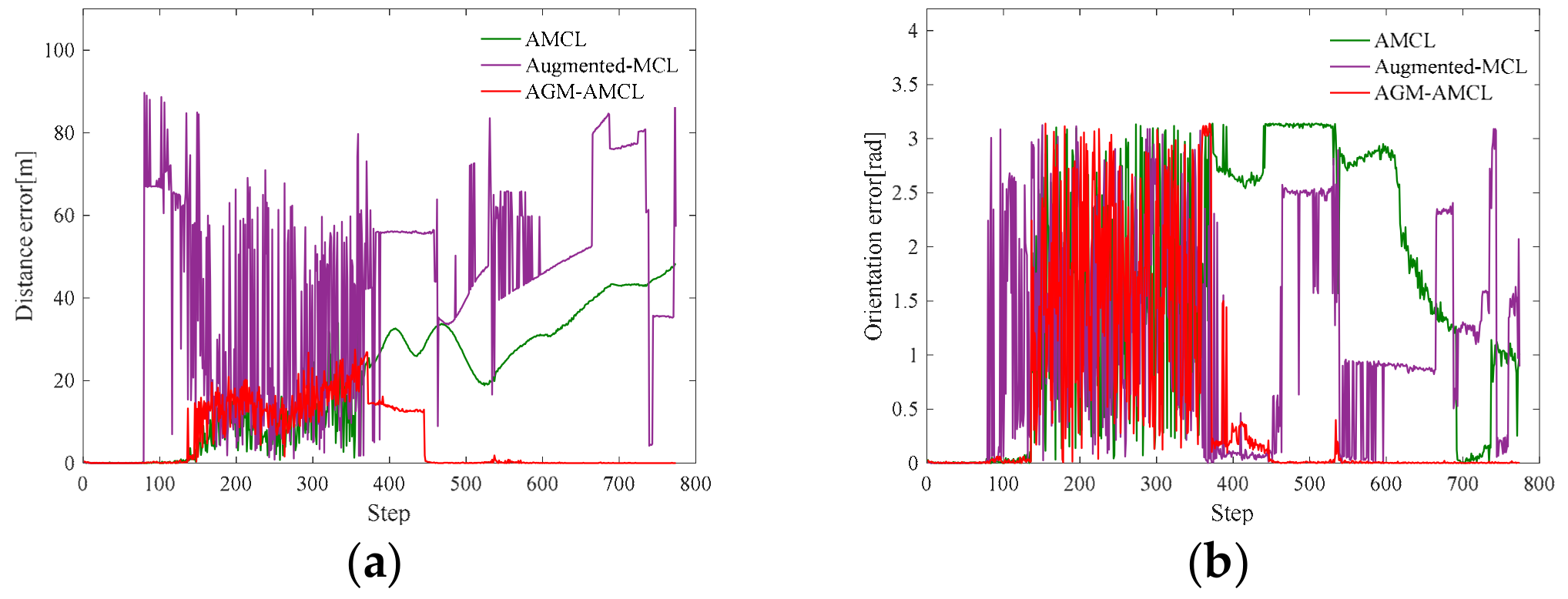
5.4. Localization Simulation
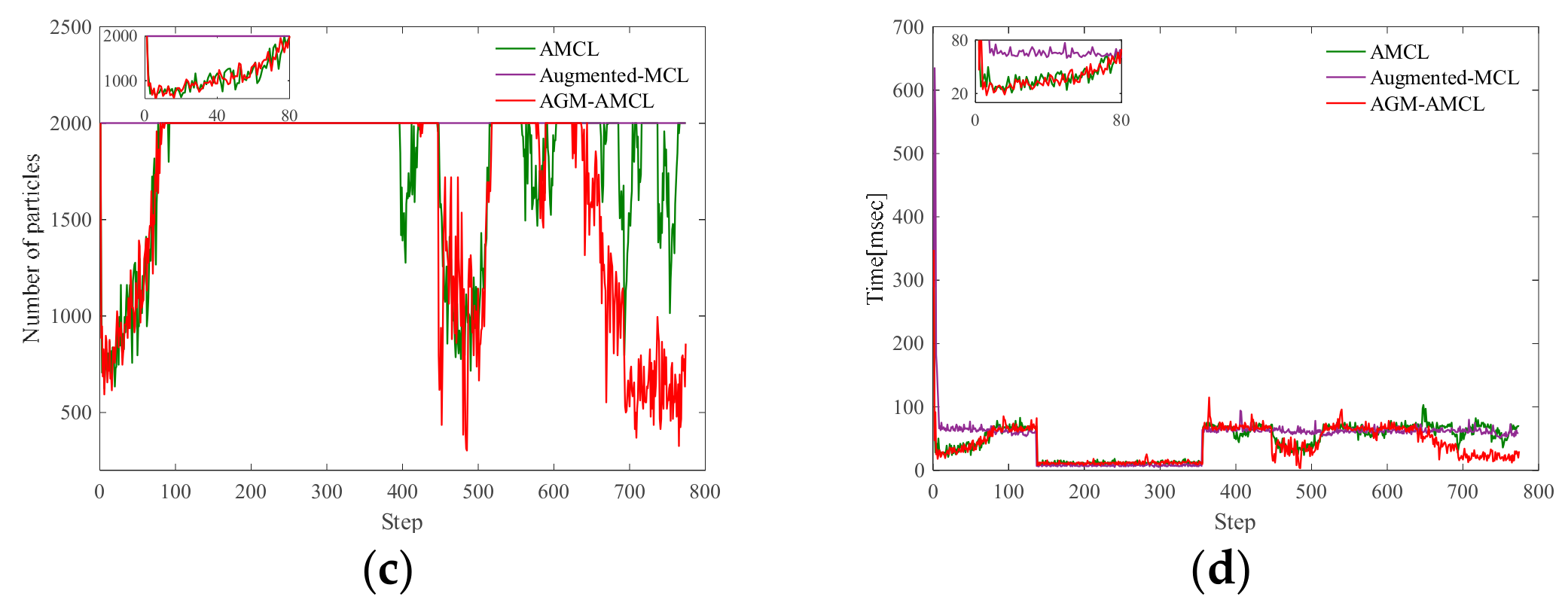
5.5. Localization Using Real-World Data
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lajoie, P.; Hu, S.; Beltrame, G.; Carlone, L. Modeling Perceptual Aliasing in SLAM via Discrete-Continuous Graphical Models. IEEE Robot. Autom. Lett. 2019, 4, 1232–1239. [Google Scholar] [CrossRef]
- Tang, J.; Chen, Y.; Jaakkola, A. NAVIS-An UGV Indoor Positioning System Using Laser Scan Matching for Large-Area Real-Time Applications. Sensors 2014, 14, 11805–11824. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pinto, A.M.; Moreira, A.P.; Costa, P.G. A localization method based on map-matching and particle swarm optimization. J. Intell. Robot. Syst. 2015, 77, 313–326. [Google Scholar] [CrossRef]
- Maffei, R.; Jorge, V.A.M.; Rey, V.F.; Kolberg, M.; Prestes, E. Fast Monte Carlo Localization using spatial density information. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 6352–6358. [Google Scholar]
- Saarinen, J.; Andreasson, H.; Stoyanov, T.; Lilienthal, A.J. Normal distributions transform Monte-Carlo localization (NDT-MCL). In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 382–389. [Google Scholar]
- Guan, R.P.; Ristic, B.; Wang, L.; Palmer, J.L. KLD sampling with Gmapping proposal for Monte Carlo localization of mobile robots. Inf. Fusion 2019, 49, 79–88. [Google Scholar] [CrossRef]
- Hanten, R.; Buck, S.; Otte, S.; Zell, A. Vector-AMCL: Vector based adaptive monte carlo localization for indoor maps. In Proceedings of the International Conference on Intelligent Autonomous Systems, Shanghai, China, 3–7 July 2016; pp. 403–416. [Google Scholar]
- Xu, S.; Chou, W.; Dong, H. A Robust Indoor Localization System Integrating Visual Localization Aided by CNN-Based Image Retrieval with Monte Carlo Localization. Sensors 2019, 19, 249. [Google Scholar] [CrossRef] [PubMed]
- Vasiljević, G.; Miklić, D.; Draganjac, I.; Kovačić, Z.; Lista, P. High-accuracy vehicle localization for autonomous warehousing. Robot. Comput. Integr. Manuf. 2015, 42, 1–16. [Google Scholar] [CrossRef]
- Li, G.; Meng, J.; Xie, Y.L.; Zhang, X.L.; Jiang, L.Q.; Huang, Y. An Improved Observation Model for Monte-Carlo Localization Integrated with Reliable Reflector Prediction. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Hong Kong, China, 8–12 July 2019. [Google Scholar]
- Meyer-Delius, D.; Beinhofer, M.; Kleiner, A.; Burgard, W. Using artificial landmarks to reduce the ambiguity in the environment of a mobile robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5173–5178. [Google Scholar]
- Cheikhrouhou, O.; Bhatti, G.; Alroobaea, R. A Hybrid DV-Hop Algorithm Using RSSI for Localization in Large-Scale Wireless Sensor Networks. Sensors 2018, 18, 1469. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Zapata, R.; Lepinay, P. Self-adaptive Monte Carlo localization for mobile robots using range finders. Robotica 2012, 30, 229–244. [Google Scholar] [CrossRef]
- Oh, S.M.; Tariq, S.; Walker, B.N.; Dellaert, F. Map-based priors for localization. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 2179–2184. [Google Scholar]
- Censi, A. On achievable accuracy for range-finder localization. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4170–4175. [Google Scholar]
- Censi, A. On achievable accuracy for pose tracking. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1–7. [Google Scholar]
- Liu, Z.; Chen, W.; Wang, Y.; Wang, J. Localizability estimation for mobile robots based on probabilistic grid map and its applications to localization. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Hamburg, Germany, 13–15 September 2012; pp. 46–51. [Google Scholar]
- Irani, B.; Wang, J.; Chen, W. A Localizability Constraint-Based Path Planning Method for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2593–2604. [Google Scholar] [CrossRef]
- Pilania, V.; Gupta, K. Localization aware sampling and connection strategies for incremental motion planning under uncertainty. Auton. Robot. 2017, 41, 111–132. [Google Scholar] [CrossRef]
- Zhen, W.; Zeng, S.; Soberer, S. Robust localization and localizability estimation with a rotating laser scanner. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 6240–6245. [Google Scholar]
- Akai, N.; Morales, L.Y.; Takeuchi, E.; Yoshihara, Y.; Ninomiya, Y. Robust localization using 3D NDT scan matching with experimentally determined uncertainty and road marker matching. In Proceedings of the IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017; pp. 6240–6245. [Google Scholar]
- Javanmardi, E.; Javanmardi, M.; Gu, Y.; Kamijo, S. Factors to Evaluate Capability of Map for Vehicle Localization. IEEE Access 2018, 6, 49850–49867. [Google Scholar] [CrossRef]
- Beinhofer, M.; Kretzschmar, H.; Burgard, W. Deploying artificial landmarks to foster data association in simultaneous localization and mapping. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5235–5240. [Google Scholar]
- Chen, Y.; Francisco, J.; Trappe, W.; Martin, R.P. A practical approach to landmark deployment for indoor localization. In Proceedings of the 3rd Annual IEEE Communications Society Conference on Sensor Mesh and Ad Hoc Communications and Networks, Reston, VA, USA, 28–28 September 2006; pp. 365–373. [Google Scholar]
- Mi, J.; Takahashi, Y. Design of an HF-Band RFID System with Multiple Readers and Passive Tags for Indoor Mobile Robot Self-Localization. Sensors 2016, 16, 1200. [Google Scholar] [CrossRef]
- Liu, F.; Zhong, D. GSOS-ELM: An RFID-Based Indoor Localization System Using GSO Method and Semi-Supervised Online Sequential ELM. Sensors 2018, 18, 1995. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, P.; Chen, Z. An improved particle filter for mobile robot localization based on particle swarm optimization. Expert Syst. Appl. 2019, 135, 181–193. [Google Scholar] [CrossRef]
- Wolcott, R.W.; Eustice, R.M. Robust LIDAR localization using multiresolution Gaussian mixture maps for autonomous driving. Int. J. Robot. Res. 2017, 36, 292–319. [Google Scholar] [CrossRef]
- Blanco, J.L.; González, J.; Fernández-Madrigal, J.-A. A robust multi-hypothesis approach to matching occupancy grid maps. Robotica 2013, 31, 687–701. [Google Scholar] [CrossRef]
- Martín, F.; Carballeira, J.; Moreno, L.; Garrido, S.; González, P. Using the Jensen-Shannon, Density Power, and Itakura-Saito Divergences to Implement an Evolutionary-Based Global Localization Filter for Mobile Robots. IEEE Access 2017, 5, 13922–13940. [Google Scholar] [CrossRef]
- Park, S.; Roh, K.S. Coarse-to-Fine Localization for a Mobile Robot Based on Place Learning With a 2-D Range Scan. IEEE Trans. Robot. 2016, 32, 528–544. [Google Scholar] [CrossRef]
- Rottmann, A.; Mozos, O.M.; Stachniss, C.; Burgard, W. Place classification of indoor environments with mobile robots using boosting. In Proceedings of the National Conference on Artificial Intelligence, Pittsburgh, PA, USA, 9–13 July 2005; pp. 1306–1311. [Google Scholar]
- Gutmann, J.S.; Fox, D. An Experimental Comparison of Localization Methods Continued. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; pp. 454–459. [Google Scholar]
- Thrun, S.; Fox, D.; Burgard, W.; Dellaert, F. Robust Monte Carlo localization for mobile robots. Artif. Intell. 2001, 128, 99–141. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Wang, P.; Chen, Z. A novel qualitative motion model based probabilistic indoor global localization method. Inf. Sci. 2018, 429, 284–295. [Google Scholar] [CrossRef]
- Pfaff, P.; Plagemann, C.; Burgard, W. Gaussian mixture models for probabilistic localization. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 467–472. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic robotics; MIT Press: Cambridge, MA, USA, 2005; pp. 153–169. [Google Scholar]
- Fox, D. Adapting the Sample Size in Particle Filters through KLD-Sampling. Int. J. Robot. Res. 2003, 22, 985–1003. [Google Scholar] [CrossRef]
- Biswas, J.; Veloso, M.M. Episodic non-Markov localization. Robot. Autom. Syst. 2017, 87, 162–176. [Google Scholar] [CrossRef]
- Särkkä, S. Bayesian Filtering and Smoothing; Cambridge University Press: Cambridge, UK, 2013; pp. 120–125. [Google Scholar]
- Even, J.; Furrer, J.; Morales, Y.; Ishi, C.T.; Hagita, N. Probabilistic 3-D Mapping of Sound-Emitting Structures Based on Acoustic Ray Casting. IEEE Trans. Robot. 2017, 33, 333–345. [Google Scholar] [CrossRef]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Corke, P. Robotics, Vision and Control: Fundamental Algorithms in MATLAB; Springer: Cham, Switzerland, 2011; pp. 32–40. [Google Scholar]


















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Meng, J.; Xie, Y.; Zhang, X.; Huang, Y.; Jiang, L.; Liu, C. Reliable and Fast Localization in Ambiguous Environments Using Ambiguity Grid Map. Sensors 2019, 19, 3331. https://doi.org/10.3390/s19153331
Li G, Meng J, Xie Y, Zhang X, Huang Y, Jiang L, Liu C. Reliable and Fast Localization in Ambiguous Environments Using Ambiguity Grid Map. Sensors. 2019; 19(15):3331. https://doi.org/10.3390/s19153331
Chicago/Turabian StyleLi, Gen, Jie Meng, Yuanlong Xie, Xiaolong Zhang, Yu Huang, Liquan Jiang, and Chao Liu. 2019. "Reliable and Fast Localization in Ambiguous Environments Using Ambiguity Grid Map" Sensors 19, no. 15: 3331. https://doi.org/10.3390/s19153331
APA StyleLi, G., Meng, J., Xie, Y., Zhang, X., Huang, Y., Jiang, L., & Liu, C. (2019). Reliable and Fast Localization in Ambiguous Environments Using Ambiguity Grid Map. Sensors, 19(15), 3331. https://doi.org/10.3390/s19153331