Load-Independent Characterization of Plate Foundation Support Using High-Resolution Distributed Fiber-Optic Sensing


Abstract
:1. Introduction
2. Plate Foundation Support Models
2.1. Modeling Idealized Soil Response
2.2. Analytical Treatment of the Plate Foundation System
3. Proposed Interpretation Method
4. Experimental Investigation
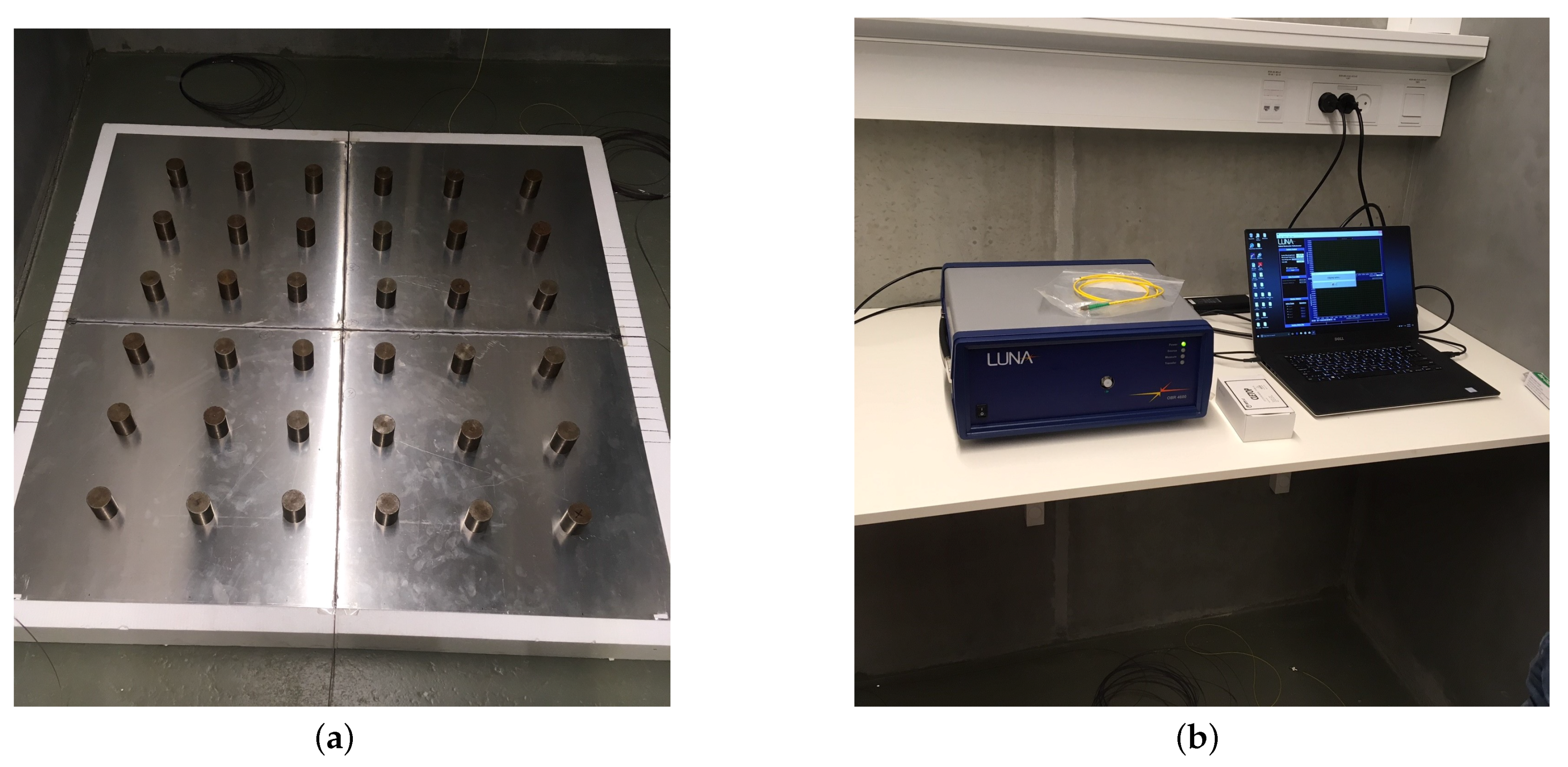
4.1. Experimental Setup
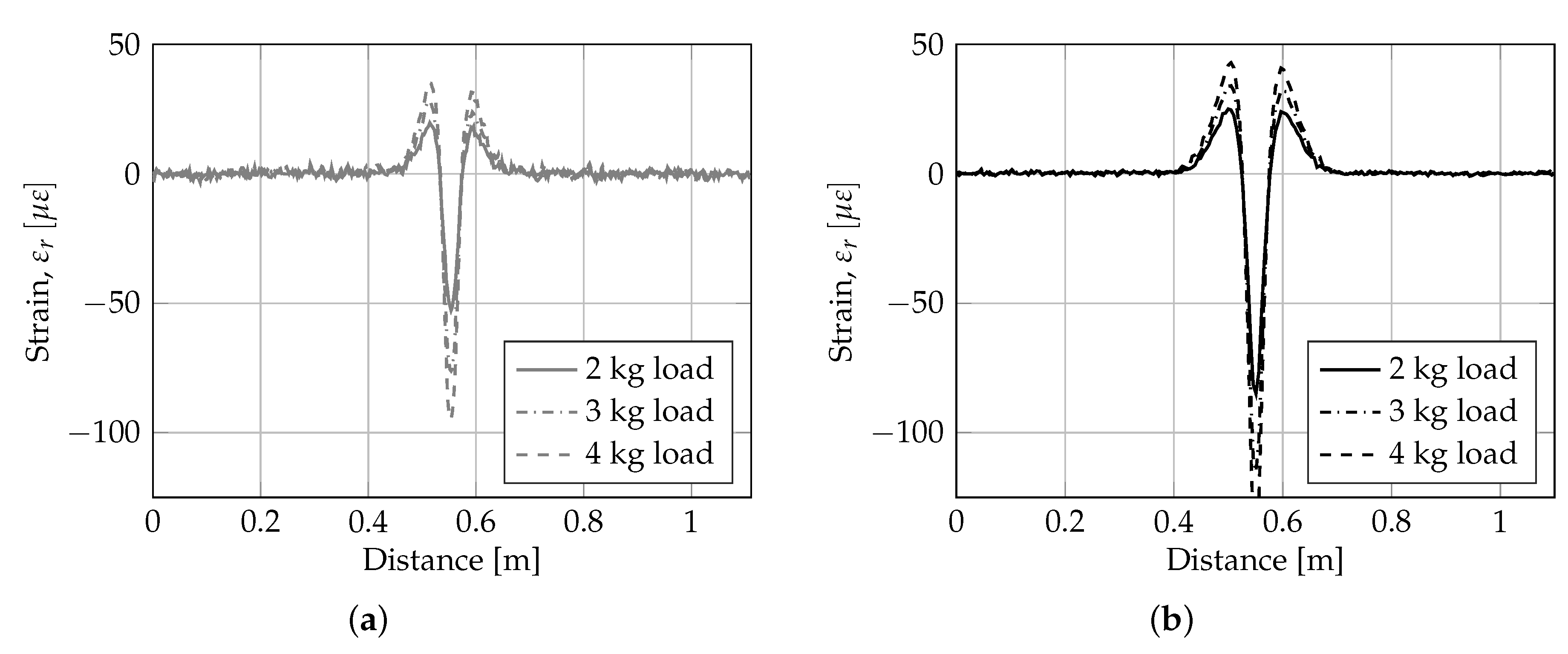
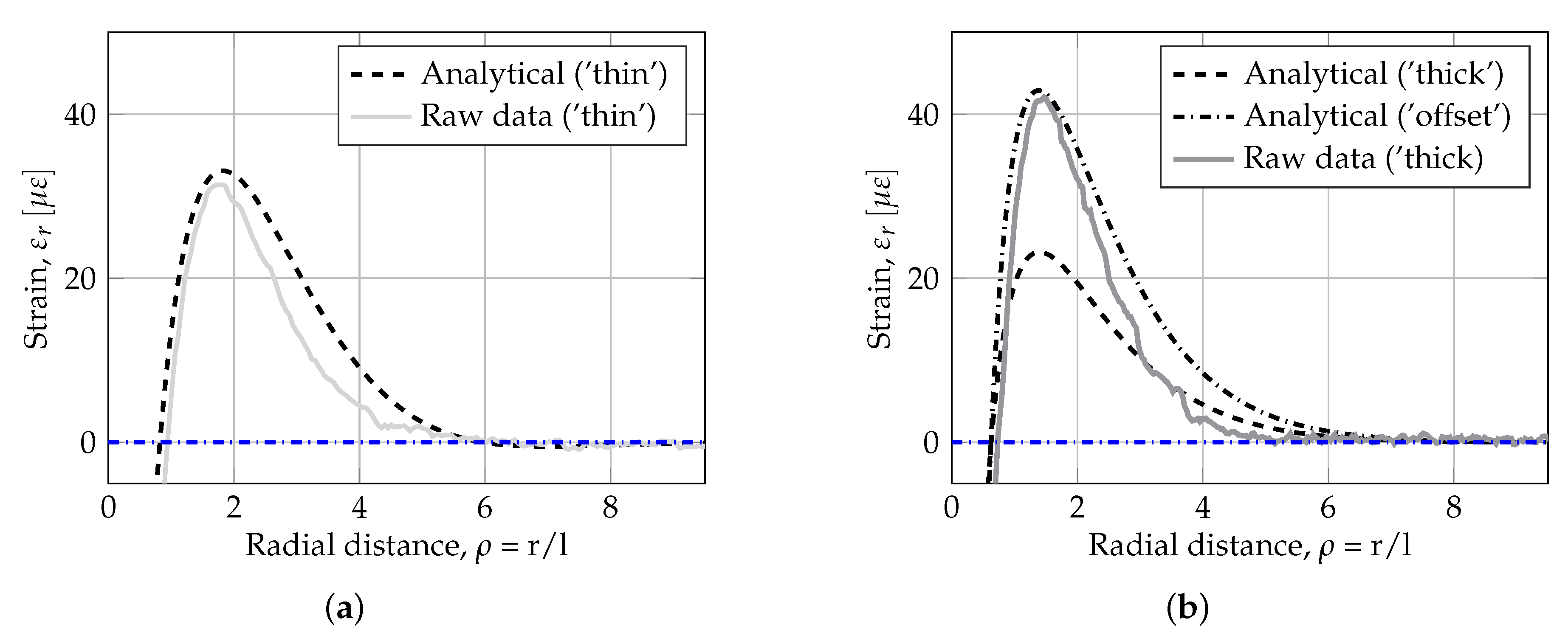
4.2. Experimental Results
4.3. Interpretation of Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Horvath, J. Soil-Structure Interaction Research Project: Basic SSI Concepts and Applications Overview; Manhattan College School of Engineering: Bronx, NY, USA, 2002. [Google Scholar]
- NCHRP. Guide for Mechanistic-Empirical Design of New and Rehabilitated Pavement Structures: Structural Response Modeling of Rigid Pavements—Appendix QQ; National Cooperative Highway Research Program, Transportation Research Board, National Research Council: Washington, DC, USA, 2003. [Google Scholar]
- Selvadurai, A.P. Elastic Analysis of Soil-Foundation Interaction; Elsevier: Amsterdam, The Netherlands, 1979. [Google Scholar]
- Horvath, J.S. Subgrade models for soil-structure interaction analysis. In Foundation Engineering: Current Principles and Practices; ASCE: Reston, VA, USA, 1989; pp. 599–612. [Google Scholar]
- Güemes, A.; Fernández-López, A.; Soller, B. Optical fiber distributed sensing—Physical principles and applications. Struct. Health Monit. 2010, 9, 233–245. [Google Scholar] [CrossRef]
- Motil, A.; Bergman, A.; Tur, M. [INVITED] State of the art of Brillouin fiber-optic distributed sensing. Opt. Laser Technol. 2016, 78, 81–103. [Google Scholar] [CrossRef]
- Meng, L.; Wang, L.; Hou, Y.; Yan, G. A Research on Low Modulus Distributed Fiber Optical Sensor for Pavement Material Strain Monitoring. Sensors 2017, 17, 2386. [Google Scholar] [CrossRef]
- Klar, A.; Levenberg, E.; Tur, M.; Zadok, A. Sensing for smart infrastructure: Prospective engineering applications. In Transforming the Future of Infrastructure Through Smarter Information, Proceedings of the International Conference on Smart Infrastructure and Construction (ICSIC 2016), Cambridge, UK, 27–29 June 2016; Institution of Civil Engineers: London, UK, 2016; pp. 289–295. [Google Scholar] [CrossRef]
- Barrias, A.; Casas, J.R.; Villalba, S. A review of distributed optical fiber sensors for civil engineering applications. Sensors 2016, 16, 748. [Google Scholar] [CrossRef] [PubMed]
- Soga, K.; Luo, L. Distributed fiber optics sensors for civil engineering infrastructure sensing. J. Struct. Integr. Maint. 2019, 3. [Google Scholar] [CrossRef]
- Klar, A.; Bennett, P.J.; Soga, K.; Mair, R.J.; Tester, P.; Fernie, R.; St John, H.D.; Torp-Petersors, G. Distributed strain measurement for pile foundations. Proc. Inst. Civ. Eng. Geotech. Eng. 2006, 159, 135–144. [Google Scholar] [CrossRef]
- Vorster, T.E.; Soga, K.; Mair, R.J.; Bennett, P.J.; Klar, A.; Choy, C.K. The use of fibre optic sensors to monitor pipeline response to tunnelling. Geocongress 2006 Geotech. Eng. Inf. Technol. Age 2006, 2006, 33. [Google Scholar] [CrossRef]
- Mohamad, H.; Bennett, P.J.; Soga, K.; Klar, A.; Pellow, A. Distributed optical fiber strain sensing in a secant piled wall. Geotech. Spec. Publ. 2007, 81. [Google Scholar] [CrossRef]
- Iten, M.; Puzrin, A.M. BOTDA road-embedded strain sensing system for landslide boundary localization. Proc. SPIE Int. Soc. Opt. Eng. 2009, 7293, 729316. [Google Scholar] [CrossRef]
- Mohamad, H.; Bennett, P.J.; Soga, K.; Mair, R.J.; Bowers, K. Behaviour of an old masonry tunnel due to tunnelling-induced ground settlement. Geotechnique 2010, 60, 927–938. [Google Scholar] [CrossRef]
- Goldfeld, Y.; Klar, A. Damage identification in reinforced concrete beams using spatially distributed strain measurements. J. Struct. Eng. 2013, 139, 04013013. [Google Scholar] [CrossRef]
- Glisic, B.; Inaudi, D. Development of method for in-service crack detection based on distributed fiber optic sensors. Struct. Health Monit. 2012, 11, 161–171. [Google Scholar] [CrossRef]
- Regier, R.; Hoult, N.A. Distributed strain behavior of a reinforced concrete bridge: Case study. J. Bridge Eng. 2014, 19, 05014007. [Google Scholar] [CrossRef]
- Xiang, P.; Wang, H.P. Optical fibre-based sensors for distributed strain monitoring of asphalt pavements. Int. J. Pavement Eng. 2016, 19, 842–850. [Google Scholar] [CrossRef]
- Chapeleau, X.; Blanc, J.; Hornych, P.; Gautier, J.L.; Carroget, J. Assessment of cracks detection in pavement by a distributed fiber optic sensing technology. J. Civ. Struct. Health Monit. 2017, 7, 459–470. [Google Scholar] [CrossRef]
- Klar, A.; Dromy, I.; Linker, R. Monitoring tunneling induced ground displacements using distributed fiber-optic sensing. Tunn. Undergr. Space Technol. 2014, 40, 141–150. [Google Scholar] [CrossRef]
- Hauswirth, D.; Puzrin, A.M.; Carrera, A.; Standing, J.R.; Wan, M.S. Use of fibre-optic sensors for simple assessment of ground surface displacements during tunnelling. Geotechnique 2014, 64, 837–842. [Google Scholar] [CrossRef]
- Lu, Y.; Zhu, T.; Chen, L.; Bao, X. Distributed Vibration Sensor Based on Coherent Detection of Phase-OTDR. J. Light. Technol. 2010, 28, 3243–3249. [Google Scholar] [CrossRef]
- Zadok, A.; Antman, Y.; Primerov, N.; Denisov, A.; Sancho, J.; Thevenaz, L. Random-access distributed fiber sensing. Laser Photonics Rev. 2012, 6, L1–L5. [Google Scholar] [CrossRef]
- Cohen, R.; London, Y.; Antman, Y.; Zadok, A. Brillouin optical correlation domain analysis with 4 millimeter resolution based on amplified spontaneous emission. Opt. Express 2014, 22, 12070–12078. [Google Scholar] [CrossRef]
- Monsberger, C.; Woschitz, H.; Hayden, M. Deformation Measurement of a Driven Pile Using Distributed Fibre-optic Sensing. J. Appl. Geod. 2016, 10, 61–69. [Google Scholar] [CrossRef]
- Stern, Y.; London, Y.; Preter, E.; Antman, Y.; Diamandi, H.H.; Silbiger, M.; Adler, G.; Levenberg, E.; Shalev, D.; Zadok, A. Brillouin Optical Correlation Domain Analysis in Composite Material Beams. Sensors 2017, 17, 2266. [Google Scholar] [CrossRef]
- Schenato, L.; Palmieri, L.; Camporese, M.; Bersan, S.; Cola, S.; Pasuto, A.; Galtarossa, A.; Salandin, P.; Simonini, P. Distributed optical fibre sensing for early detection of shallow landslides triggering. Sci. Rep. 2017, 7, 14686. [Google Scholar] [CrossRef]
- Zadok, A.; Preter, E.; London, Y. Phase-Coded and Noise-Based Brillouin Optical Correlation-Domain Analysis. Appl. Sci. 2018, 8, 1482. [Google Scholar] [CrossRef]
- Monsberger, C.; Lienhart, W.; Hirschmüller, S.; Marte, R. Monitoring of soil nailed slope stabilizations using distributed fiber optic sensing. Proc. SPIE Int. Soc. Opt. Eng. 2018, 10598, 1059835. [Google Scholar] [CrossRef]
- Uchida, S.; Levenberg, E.; Klar, A. On-specimen strain measurement with fiber optic distributed sensing. Meas. J. Int. Meas. Confed. 2015, 60, 104–113. [Google Scholar] [CrossRef]
- Westergaard, H.M. New Formulas for Stress in Concrete Pavements of Airfields. Am. Soc. Civ. Eng. Trans. 1948, 113, 425–439. [Google Scholar]
- Ioannides, A.; Thompson, M.R.; Barenberg, E.J. Westergaard solutions reconsidered. Transp. Res. Rec. 1985, 1043, 13–23. [Google Scholar]
- Khazanovich, L.; Ioannides, A.M. Finite element analysis of slabs-on-grade using higher order subgrade soil models. In Proceedings of the Conference on Airport Pavement Innovations, Vicksburg, MS, USA, 8–10 September 1993. [Google Scholar]
- Khazanovich, L. Finite element analysis of curling of slabs on Pasternak foundation. In Proceedings of the 16th ASCE Engineering Mechanics Conference, Seattle, WA USA, 16–18 July 2003; pp. 16–18. [Google Scholar]
- Ioannides, A.M. Concrete pavement analysis: The first eighty years. Int. J. Pavement Eng. 2006, 7, 233–249. [Google Scholar] [CrossRef]
- Winkler, E. Die Lehre von der Elasticitaet und Festigkeit; Verlag Dominicus: Prag, Czech Republic, 1868. [Google Scholar]
- Colasanti, R.J.; Horvath, J.S. Practical subgrade model for improved soil-structure interaction analysis: Software implementation. Pract. Period. Struct. Des. Constr. 2010, 15, 278–286. [Google Scholar] [CrossRef]
- Boussinesq, J. Application des Potentiels a L’équilibre et du Mouvement des Solides Élastiques...; Gauthier-Villars: Paris, France, 1885; Volume 4. [Google Scholar]
- Filonenko-Borodich, M. Some approximate theories of the elastic foundation. Uchenyie Zap. Mosk. Gos. Univ. Mekhanica 1940, 46, 3–18. [Google Scholar]
- Pasternak, P. On a New Method of Analysis of an Elastic Foundation by Means of Two Constants [Gosudarstvennoe Izdatelstvo Literaturi po Stroitelstvu I Arkhitekture]; USSR: Moscow, Russia, 1954. [Google Scholar]
- Kerr, A.D. A study of a new foundation model. Acta Mech. 1965, 1, 135–147. [Google Scholar] [CrossRef] [Green Version]
- Reissner, E. A note on deflections of plates on a viscoelastic foundation. J. Appl. Mech. 1958, 25, 144–145. [Google Scholar]
- Vlasov, V.Z.; Leont’ev, N. Beams, Plates, and Shells on an Elastic Base; Fizmatgiz: Moscow, Russia, 1960. [Google Scholar]
- Biot, M.A. Bending of an infinite beam on an elastic foundation. J. Appl. Math. Mech. 1922, 2, 165–184. [Google Scholar]
- Klar, A.; Vorster, T.; Soga, K.; Mair, R. Soil-pipe interaction due to tunnelling: Comparison between Winkler and elastic continuum solutions. Geotechnique 2005, 55, 461–466. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, C.; Huang, M. Soil-pipe interaction due to tunnelling: Assessment of Winkler modulus for underground pipelines. Comput. Geotech. 2013, 50, 17–28. [Google Scholar] [CrossRef]
- Daloglu, A.T.; Vallabhan, C.V.G. Values of k for slab on Winkler foundation. J. Geotech. Geoenviron. Eng. 2000, 126, 463–471. [Google Scholar] [CrossRef]
- Terzaghi, K. Evaluation of coefficients of subgrade reaction. Geotechnique 1955, 5, 297–326. [Google Scholar] [CrossRef]
- Vesic, A. Bending of beams resting on isotropic elastic solid. J. Eng. Mech. Div. 1961, 87, 35–54. [Google Scholar]
- Vallabhan, C.G.; Das, Y. Parametric study of beams on elastic foundations. J. Eng. Mech. 1987, 114, 2072–2082. [Google Scholar] [CrossRef]
- Vallabhan, C.V.G.; Das, Y.C. Modified Vlasov model for beams on elastic foundations. J. Geotech. Eng. 1991, 117, 956–966. [Google Scholar] [CrossRef]
- Fwa, T.; Shi, X.; Tan, S. Use of Pasternak foundation model in concrete pavement analysis. J. Transp. Eng. ASCE 1996, 122, 323–328. [Google Scholar] [CrossRef]
- Skar, A.; Poulsen, P.; Olesen, J. Cohesive cracked-hinge model for simulation of fracture in one-way slabs on grade. Int. J. Pavement Eng. 2017. [Google Scholar] [CrossRef]
- Loof, H. The theory of the coupled spring foundation as applied to the investigation of structures supported on soil. Heron 1965, 3, 29–49. [Google Scholar]
- Setiadji, B.H.; Fwa, T.F. Examining k-E relationship of pavement subgrade based on load-deflection consideration. J. Transp. Eng. 2009, 135, 140–148. [Google Scholar] [CrossRef]
- ASTM D1196/D1196M-12(2016). Standard Test Method for Nonrepetitive Static Plate Load Tests of Soils and Flexible Pavement Components, for Use in Evaluation and Design of Airport and Highway Pavements; ASTM International: West Conshohocken, PA, USA, 2016. [Google Scholar] [CrossRef]
- Timoshenko, S.P.; Woinowsky-Krieger, S. Theory of Plates and Shells; McGraw-Hill Book Company, Inc.: New York, NY, USA, 1959. [Google Scholar]
- Van Cauwelaert, F.; Stet, M.; Jasienski, A. The General Solution for a Slab Subjected to Centre and Edge Loads and Resting on a Kerr Foundation. Int. J. Pavement Eng. 2002, 3, 1–18. [Google Scholar] [CrossRef]
- Westergaard, H. Stresses in concrete pavements computed by theoretical analysis. Public Roads 1926, 7, 25–35. [Google Scholar]
- Hogg, A.H.A. Equilibrium of a thin plate, symmetrically loaded, resting on an elastic foundation of infinite depth. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1938, 25, 576–582. [Google Scholar] [CrossRef]
- Levenberg, E.; Klar, A.; Skar, A. Foundation Characterization for Slab-On-Grade Constructions with Fiber-Optic Distributed Strain-Sensing. In Proceedings of the ASCE Geo-Congress 2020. Submitted.
- Luna OBR 4600 Fiber Optic Sensing Device. Available online: https://lunainc.com/product/sensing-solutions/obr-4600/ (accessed on 27 May 2019).
- Regupol® Rubber Material Specification. Available online: http://vibratec.se/products/regupol-vibration-1000/ (accessed on 27 May 2019).
- Jackopor® Polystyrene Material Specification. Available online: https://www.jackon.no/assets/FileUploads/Teknisk-tabell-Jackon-EPS-05-2017.pdf (accessed on 27 May 2019).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Element | Material | Young’s Modulus | Poisson’s Ratio | Thickness | Length | Width |
|---|---|---|---|---|---|---|
| [MPa] | [-] | [mm] | [mm] | [mm] | ||
| Plate | Aluminium | 68,300 | 0.33 | 1.5 | 1100 | 1100 |
| Support (‘thin’) | Rubber [64] | 2–4 | 0.45 | 10.0 | 1250 | 1250 |
| Support (‘thick’) | Polystyrene [65] | 1–2 | 0.05 | 100.0 | 1200 | 1200 |
| = 68.10 mm | = 6.81 mm | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| DP | DP | DP | DP/DP | DP | DP | DP | DP/DP | |||
| 0 | 0.152 | |||||||||
| 0 | 0.811 | 1.821 | 5.962 | 0.136 | 0 | 0.924 | 1.910 | 6.006 | 0.154 | |
| 0.01 | 0.808 | 1.815 | 5.986 | 0.01 | 0.921 | 1.904 | 6.030 | → | = 21.72 mm | |
| 0.02 | 0.152 | |||||||||
| 0.20 | 0.753 | 1.694 | 6.456 | 0.117 | 0.20 | 0.879 | 1.798 | 6.504 | 0.135 | |
| 0.40 | 0.705 | 1.585 | 7.202 | 0.098 | 0.40 | 0.843 | 1.703 | 7.254 | 0.116 | |
| 0.60 | 0.664 | 1.490 | 8.477 | 0.078 | 0.60 | 0.813 | 1.622 | 8.532 | 0.095 | |
| 0.70 | 0.645 | 1.447 | 9.561 | 0.067 | 0.70 | 0.800 | 1.585 | 9.617 | 0.083 | |
| 0.75 | 0.063 | |||||||||
| 0.80 | 0.628 | 1.408 | 11.350 | 0.80 | 0.788 | 1.552 | 11.408 | → | = 33.82 mm | |
| 0.80 | 0.628 | 1.407 | 11.384 | 0.055 | 0.80 | 0.788 | 1.551 | 11.442 | 0.090 | |
| 0.85 | 0.063 | |||||||||
| 0.85 | 0.620 | 1.387 | 12.941 | 0.048 | 0.85 | 0.783 | 1.535 | 12.982 | 0.060 | |
| 0.90 | 0.613 | 1.369 | 15.242 | 0.040 | 0.90 | 0.777 | 1.520 | 15.591 | 0.050 | |
| 0.95 | 0.605 | 1.351 | 21.533 | 0.029 | 0.95 | 0.772 | 1.505 | 21.730 | 0.037 | |
| 1.00 | 0.598 | 1.333 | ∞ | 0.000 | 1.00 | 0.767 | 1.491 | ∞ | 0.000 | |
| Support Type | DP | DP | DP | k | b | ||
|---|---|---|---|---|---|---|---|
| [mm] | [mm] | [mm] | [MPa/mm] | [-] | [MPa] | [-] | |
| ‘thin’ | 18.8 (19.9) | 40.4 (37.9) | 130.2 (130.9) | 0.097 | 0.005 | 3.38 (2–4) | (0.45) |
| ‘thick’ | 23.0 (24.4) | 48.0 (47.0) | 417.8 (400.0) | 0.019 | 0.843 | 1.22 (1–2) | (0.05) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skar, A.; Klar, A.; Levenberg, E. Load-Independent Characterization of Plate Foundation Support Using High-Resolution Distributed Fiber-Optic Sensing. Sensors 2019, 19, 3518. https://doi.org/10.3390/s19163518
Skar A, Klar A, Levenberg E. Load-Independent Characterization of Plate Foundation Support Using High-Resolution Distributed Fiber-Optic Sensing. Sensors. 2019; 19(16):3518. https://doi.org/10.3390/s19163518
Chicago/Turabian StyleSkar, Asmus, Assaf Klar, and Eyal Levenberg. 2019. "Load-Independent Characterization of Plate Foundation Support Using High-Resolution Distributed Fiber-Optic Sensing" Sensors 19, no. 16: 3518. https://doi.org/10.3390/s19163518
APA StyleSkar, A., Klar, A., & Levenberg, E. (2019). Load-Independent Characterization of Plate Foundation Support Using High-Resolution Distributed Fiber-Optic Sensing. Sensors, 19(16), 3518. https://doi.org/10.3390/s19163518