Impact Localisation in Composite Plates of Different Stiffness Impactors under Simulated Environmental and Operational Conditions



Abstract
:1. Introduction
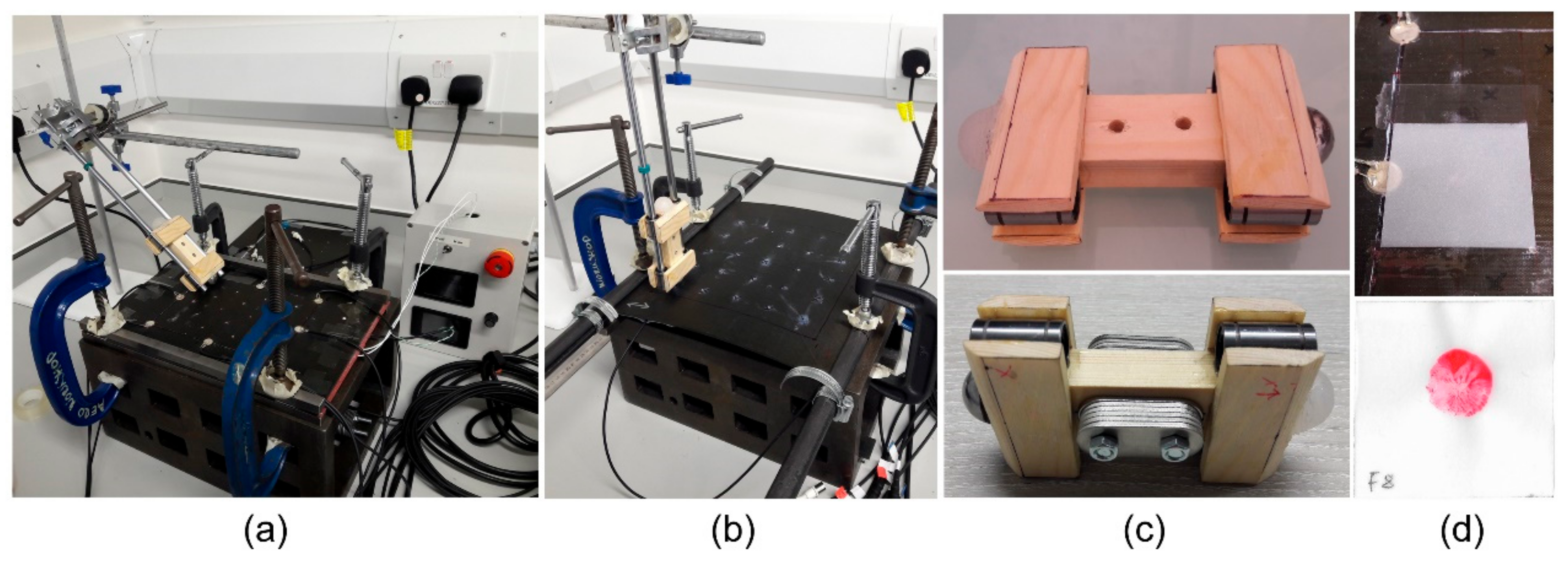
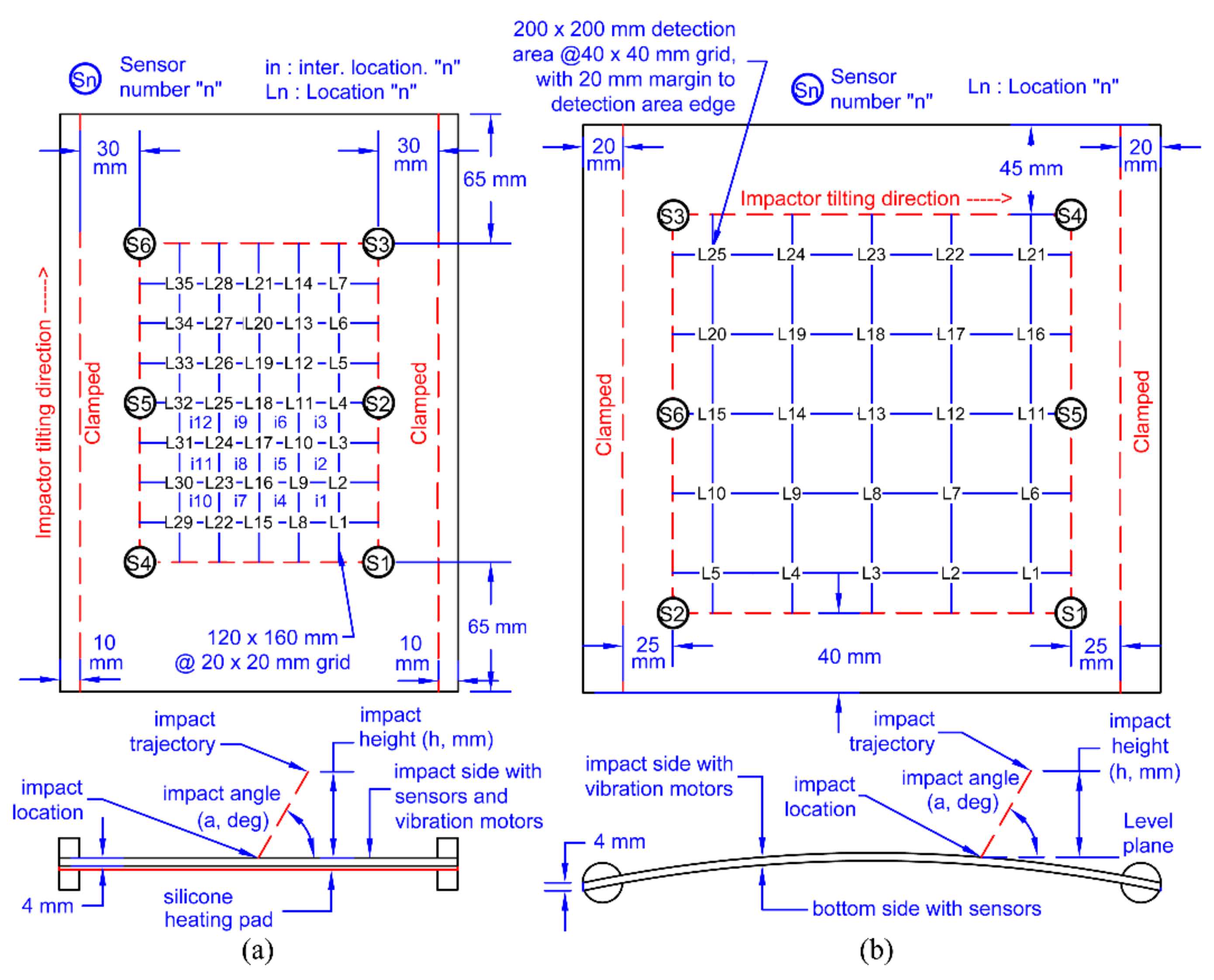
2. Experimental Setup
3. Impact Signal and Contact Behaviour from Hard and Soft Impacts
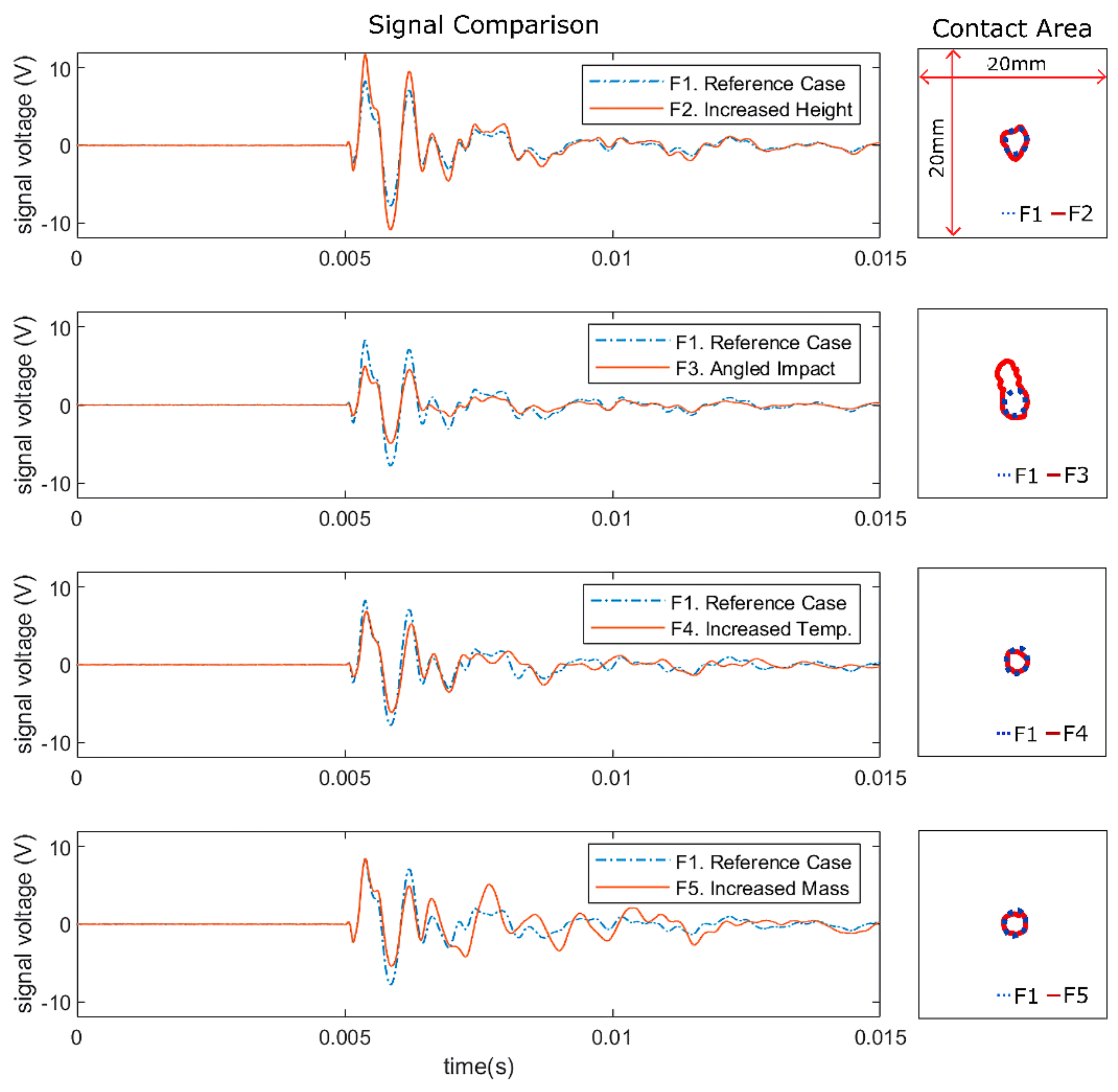
3.1. Effect of Impact Case Variation on Impact Signal and Contact Behaviour
3.2. Simulation of Random Vibration Noise and Noise Filtering
4. Feature Extraction from Hard and Soft Impacts for Localisation
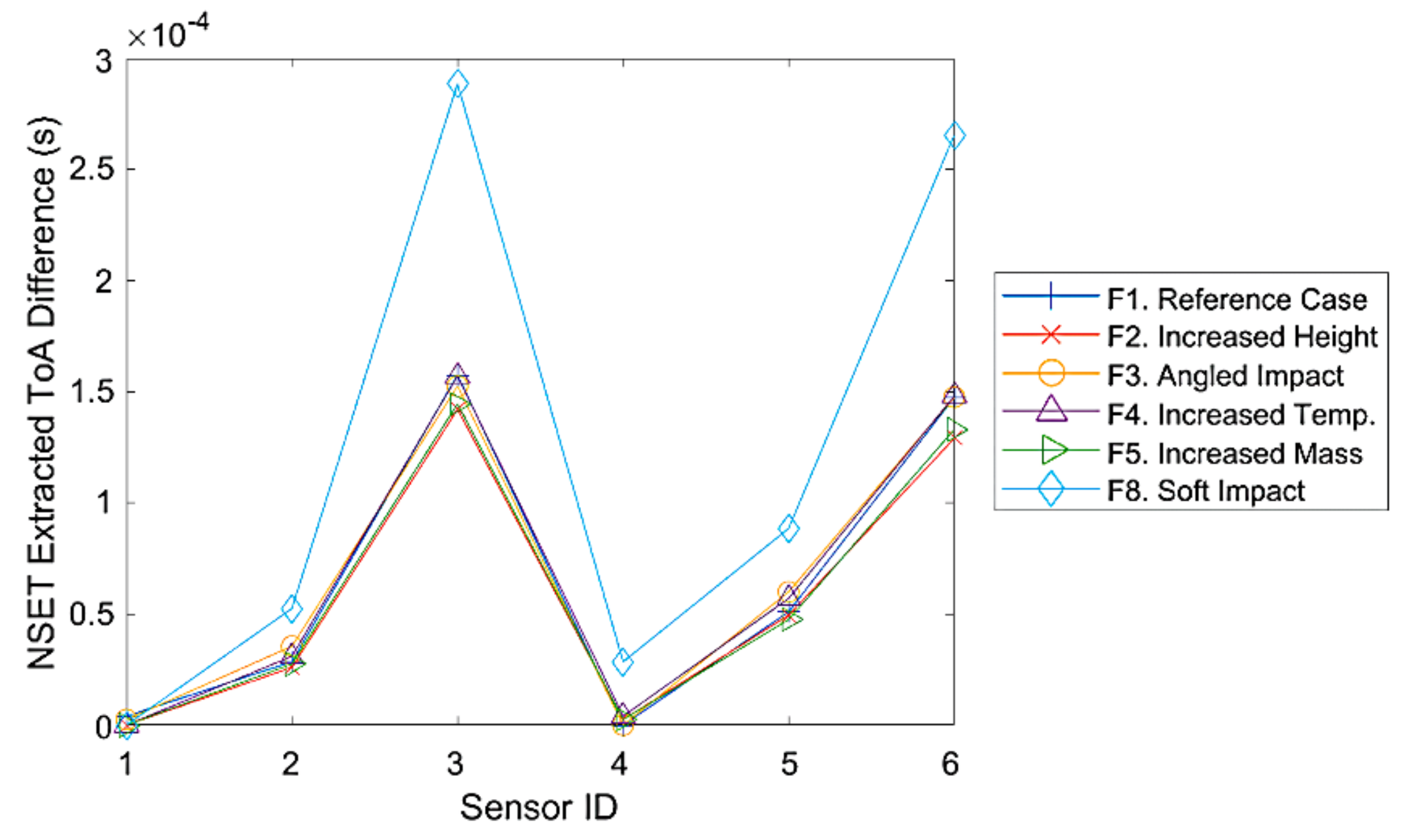
4.1. Normalised Smooth Envelope Threshold (NSET) Method for ToA Extraction
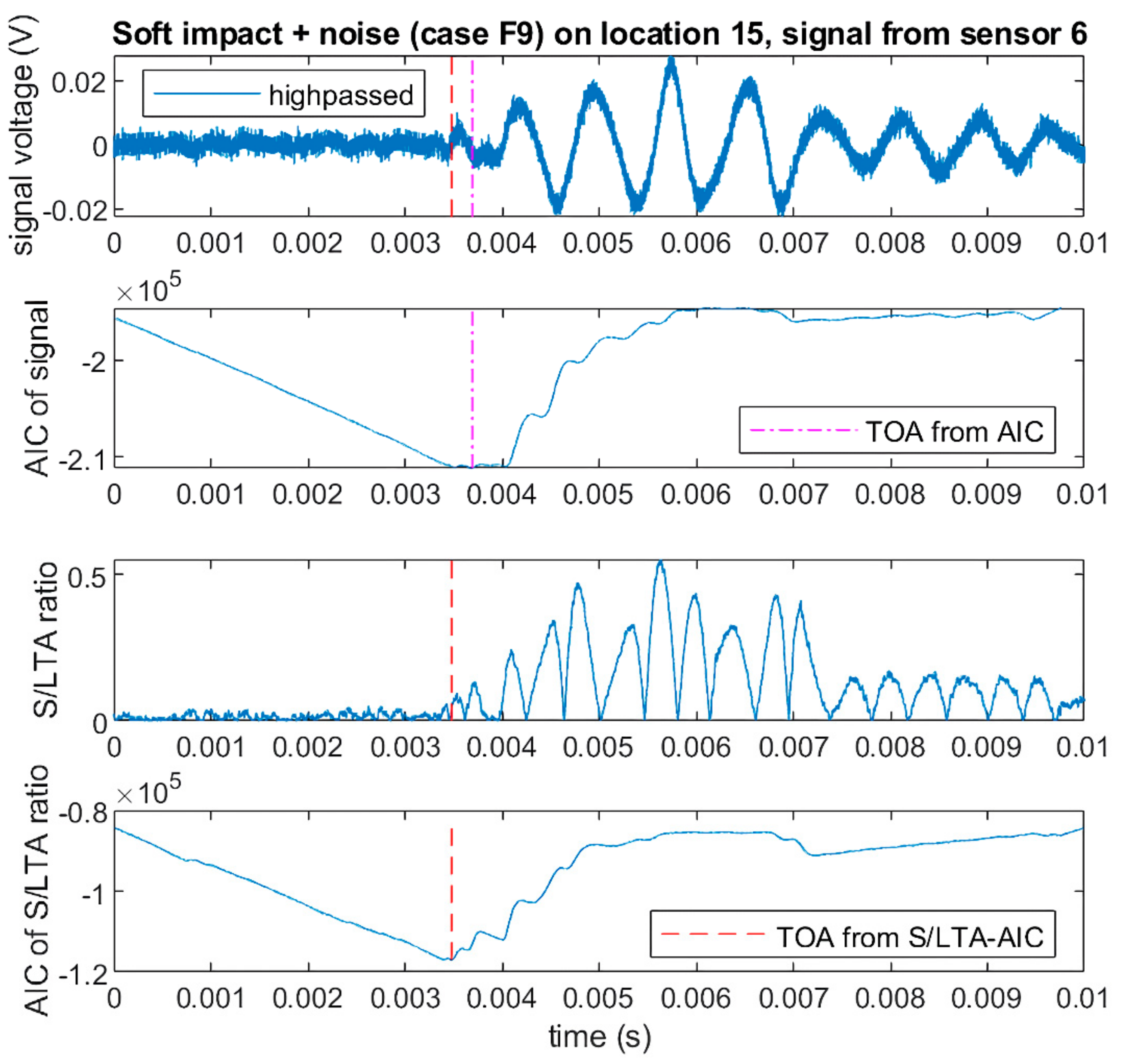
4.2. Modified Akaike Information Criterion (AIC) Method for ToA Extraction
4.3. Signal Amplitude
5. Impact Localisation Methods
5.1. Artificial Neural Networks (ANNs)
5.2. Reference Database Method (DTB Method)
6. Impact Localisation Results
6.1. Comparison between Localisation Methods
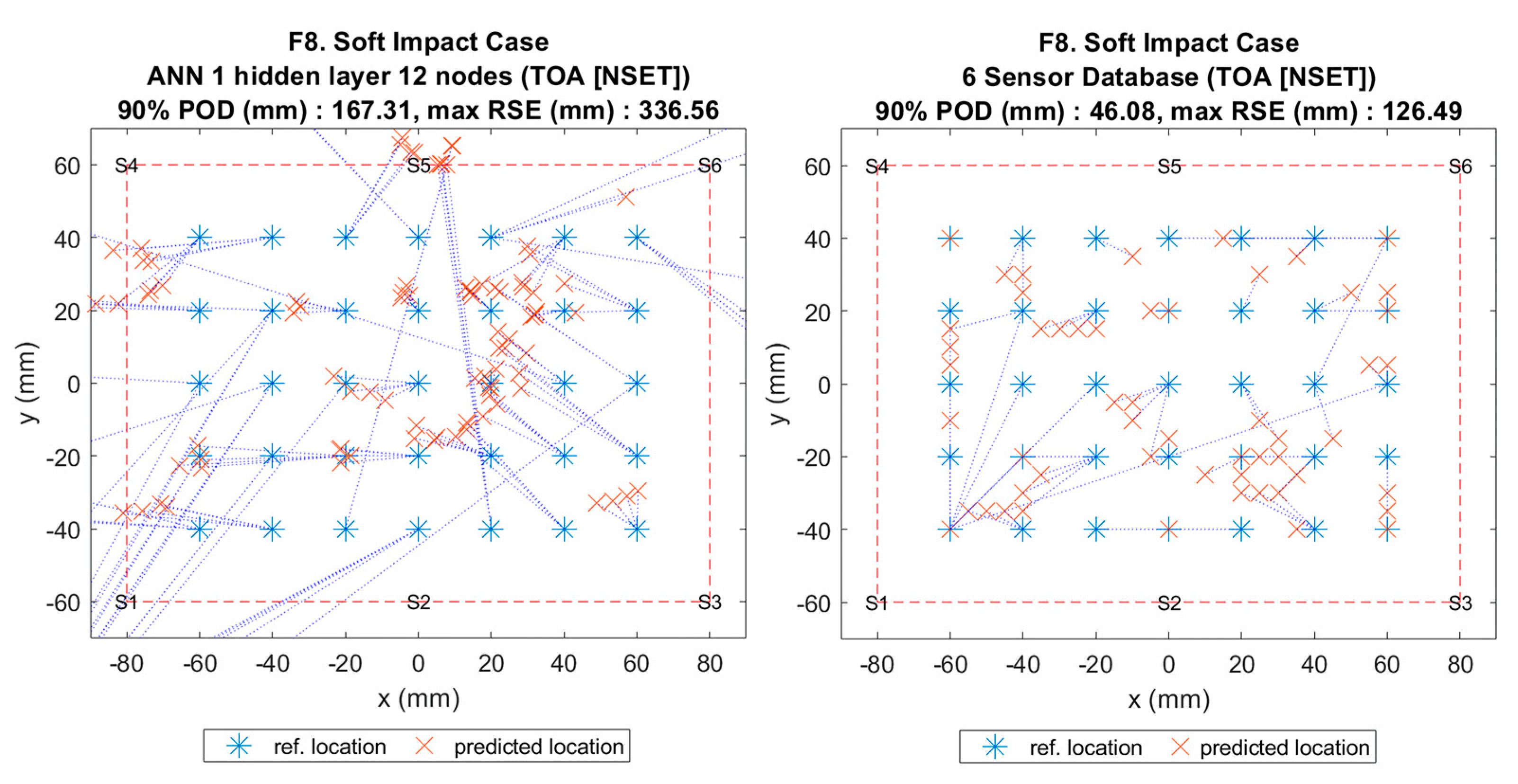
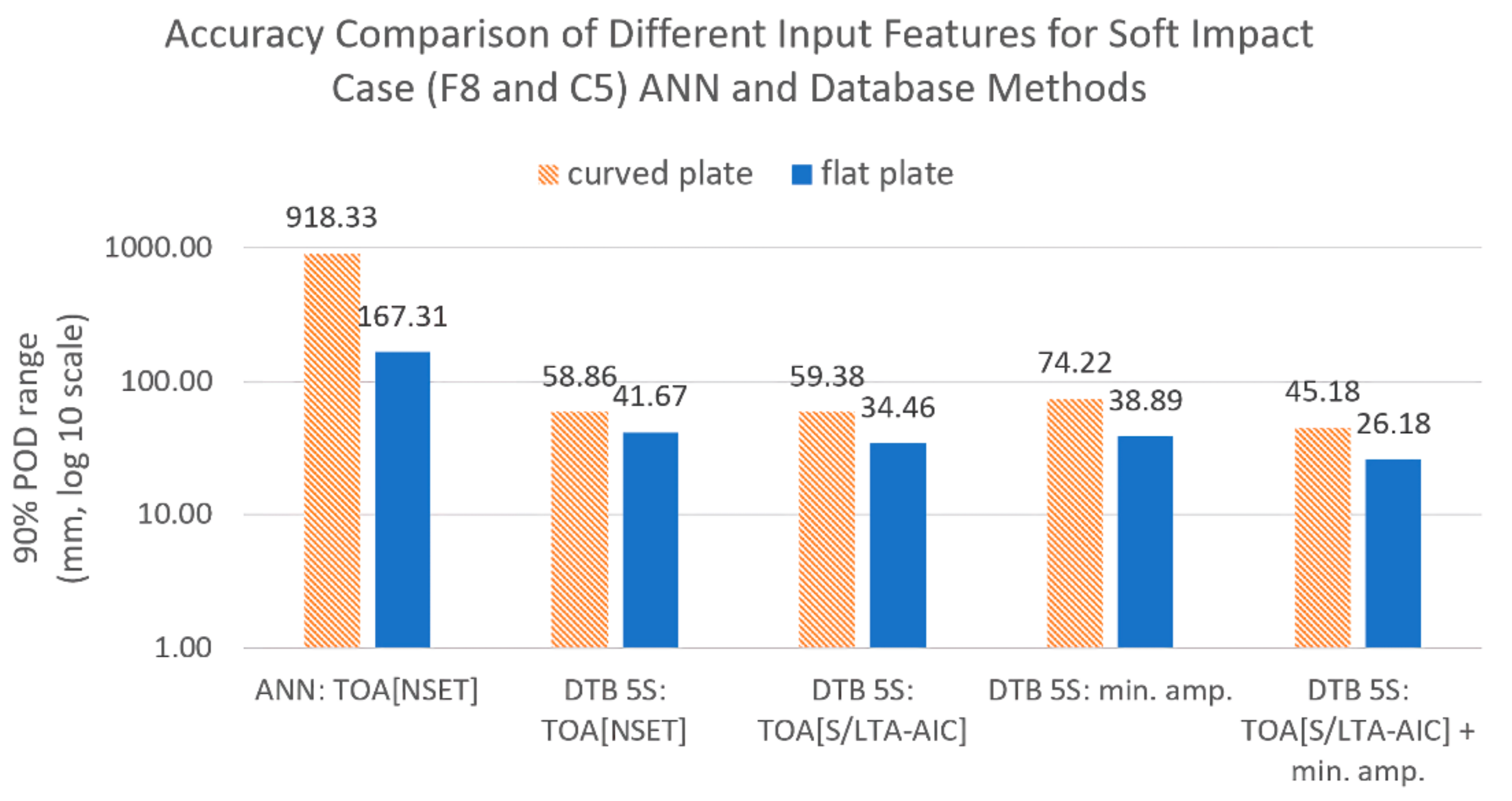
6.2. Comparison Between Input Features for Localisation
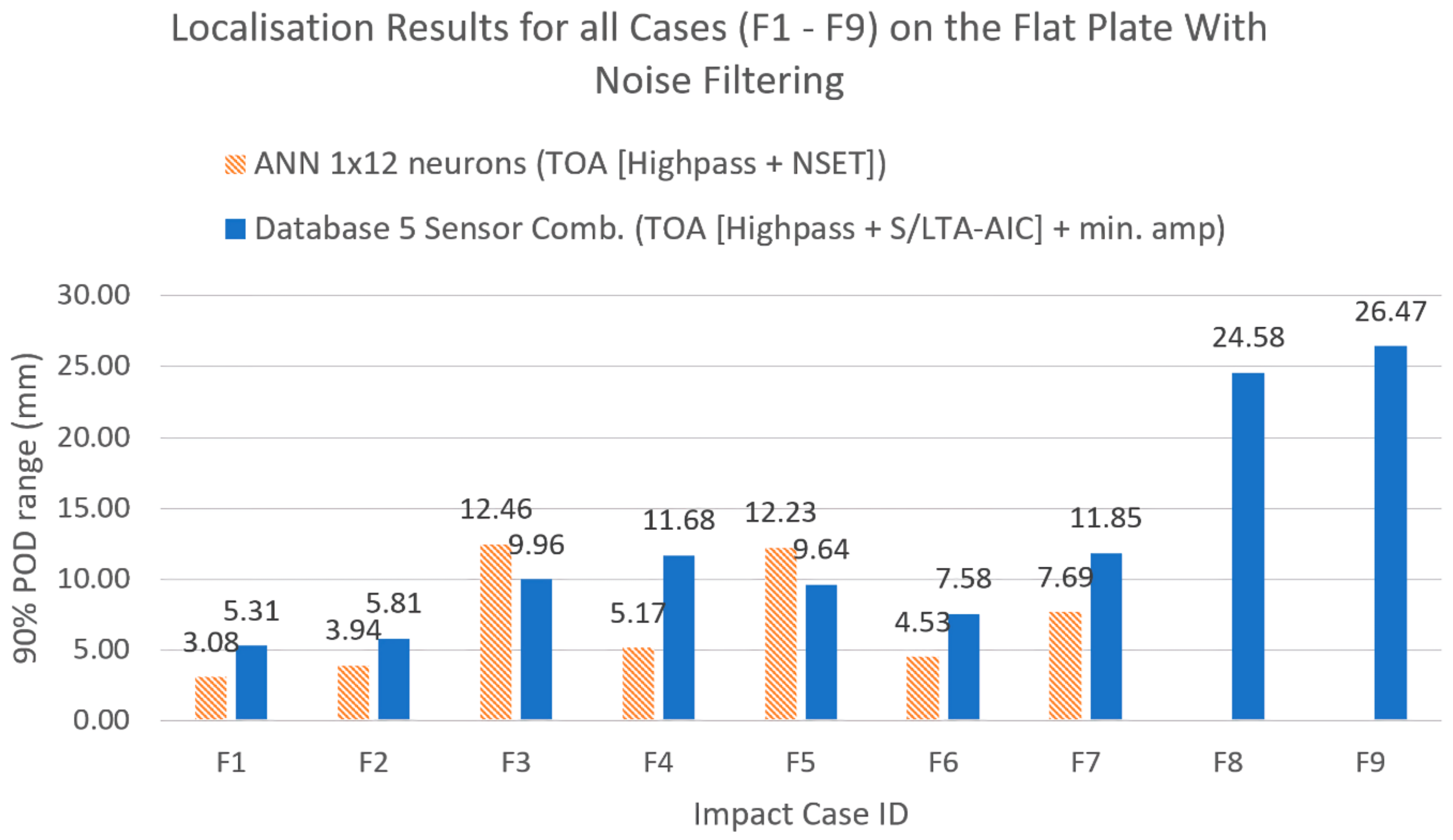
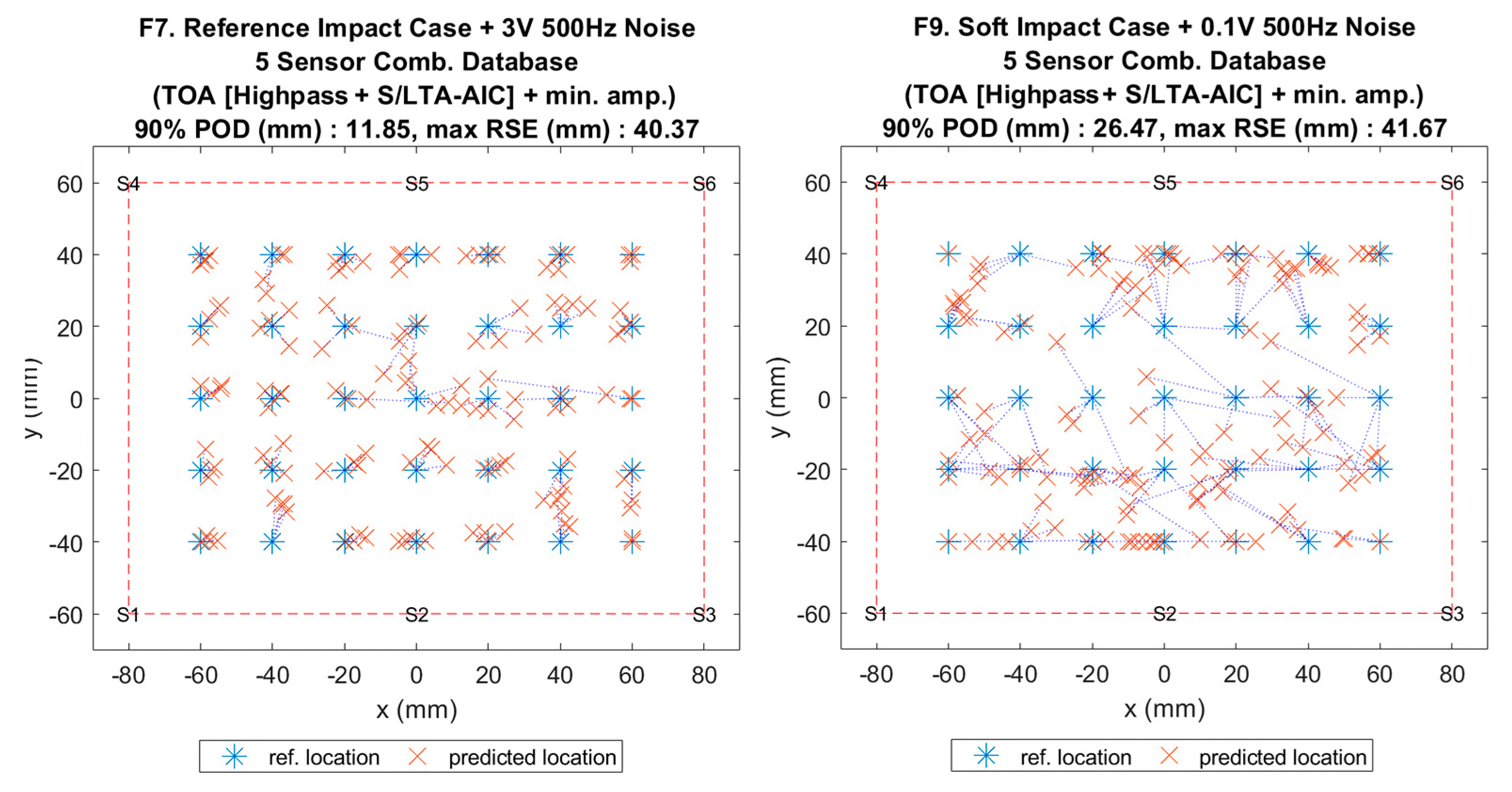
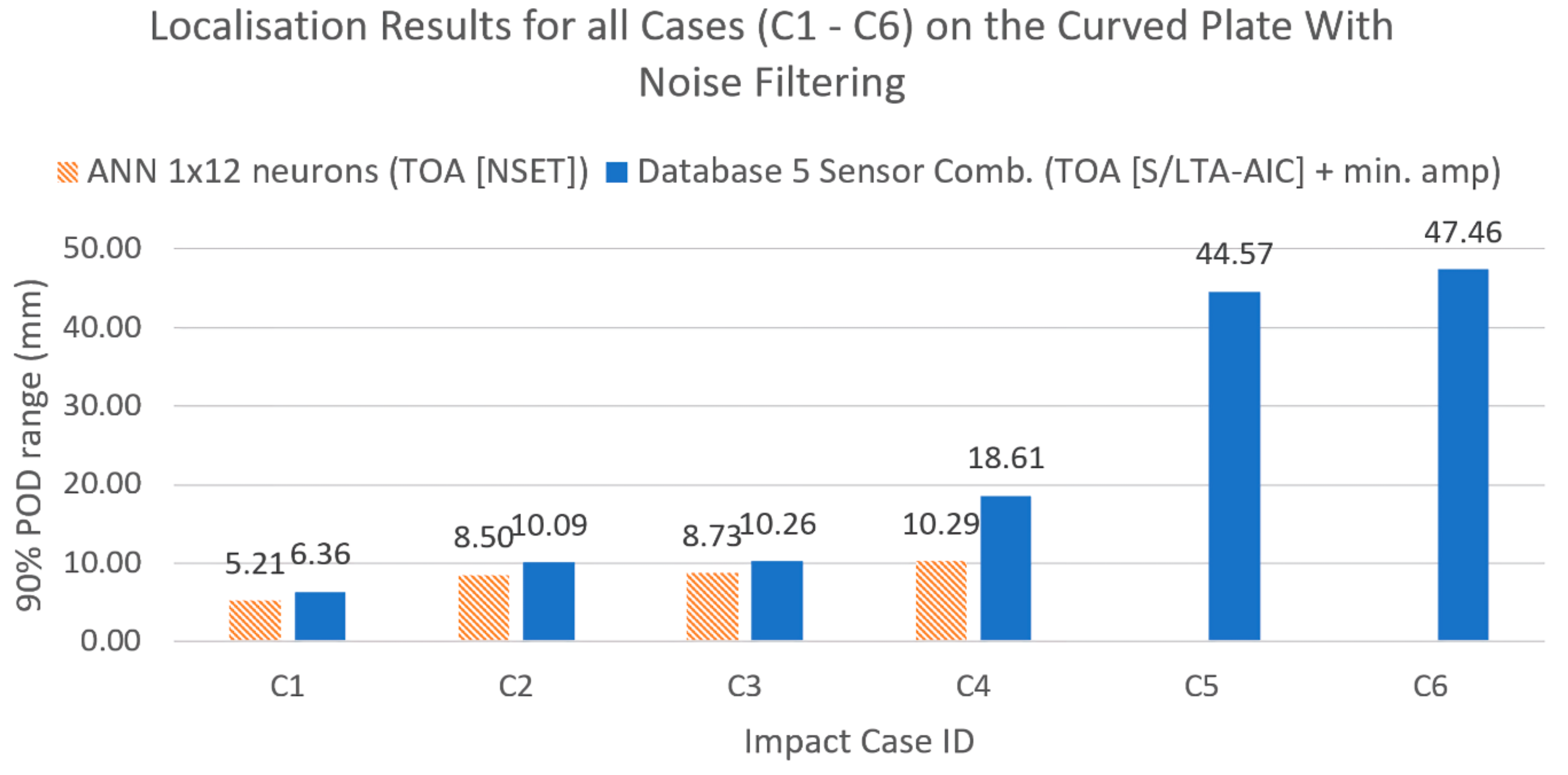
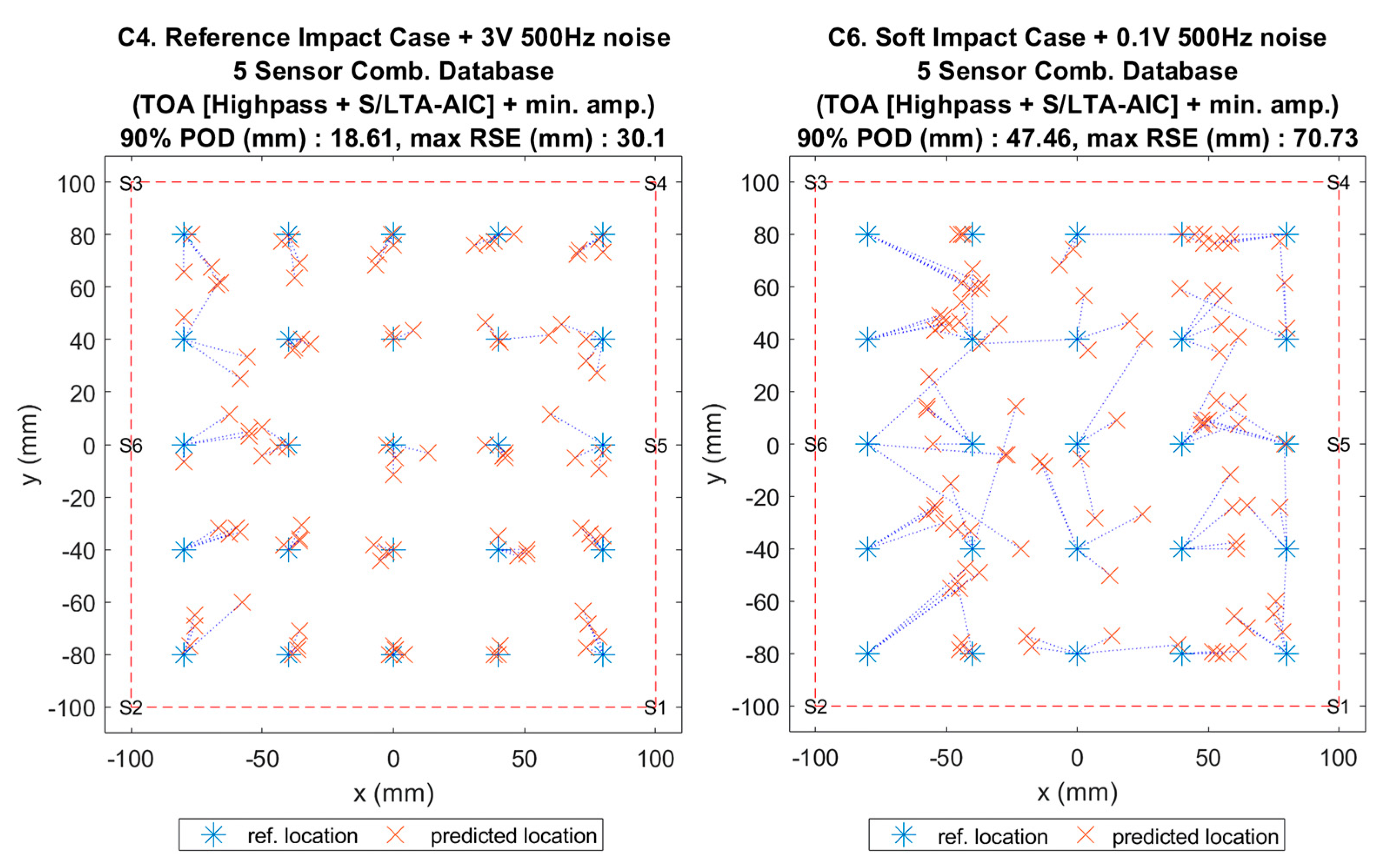
6.3. Comparison Between Reference Method and Proposed Method
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, H.; DeFrancisci, G.; Chen, Z.M.; Rhymer, J. Impact damage formation on composite aircraft structures. In Proceedings of the UCSD FAA JAMS Paper, Technical Review Meeting, Baltimore, MD, USA, 5 July 2012. [Google Scholar]
- Fawcett, A.J.; Oakes, G.D. Boeing composite airframe damage tolerance and service experience. In Proceedings of the Composite Damage Tolerance and Maintenance Workshop, Chicago, IL, USA, 19 July 2006. [Google Scholar]
- Erchart, D.; Ostrom, L.T.; Wilhelmsen, C.A. Visual detectibility of dents on a composite aircraft inspection specimen: an initial study. Int. J. Appl. Aviat. Stud. 2004, 4, 111–122. [Google Scholar]
- Abrate, S. Impact On Composite Structures; Cambridge University Press: Cambridge, England, UK, 2005. [Google Scholar]
- Fu, H.; Seno, A.H.; Khodaei, Z.S.; Ferri Aliabadi, M.H. Design of a Wireless Passive Sensing System for Impact Detection of Aerospace Composite Structures. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20 June 2018; pp. 585–589. [Google Scholar]
- Bekas, D.; Sharif-Khodaei, Z.; Aliabadi, M.H. An Innovative Diagnostic Film for Structural Health Monitoring of Metallic and Composite Structures. Sensors 2018, 18, 2084. [Google Scholar] [CrossRef] [PubMed]
- Yuan, S.; Ren, Y.; Qiu, L.; Mei, H. A Multi-Response-Based Wireless Impact Monitoring Network for Aircraft Composite Structures. IEEE Trans. Ind. Electron. 2016, 63, 7712–7722. [Google Scholar] [CrossRef]
- Coverley, P.T.; Staszewski, W.J. Impact damage location in composite structures using optimized sensor triangulation procedure. Smart Mater. Struct. 2003, 12, 795–803. [Google Scholar] [CrossRef]
- De Simone, M.E.; Ciampa, F.; Boccardi, S.; Meo, M. Impact source localisation in aerospace composite structures. Smart Mater. Struct. 2017, 26, 125026. [Google Scholar] [CrossRef] [Green Version]
- Beligni, A.; Sbarufatti, C.; Gilioli, A.; Cadini, F.; Giglio, M. Robust Identification of Strain Waves due to Low-Velocity Impact with Different Impactor Stiffness. Sensors 2019, 19, 1283. [Google Scholar] [CrossRef] [PubMed]
- Yue, N.; Sharif Khodaei, Z. Assessment of Impact Detection Techniques for Aeronautical Application: ANN vs. LSSVM. J. Multiscale Model. 2016, 7, 1640005. [Google Scholar] [CrossRef]
- Sharif Khodaei, Z.; Ghajari, M.; Aliabadi, M.H. Determination of impact location on composite stiffened panels. Smart Mater. Struct. 2012, 21, 105026. [Google Scholar] [CrossRef]
- Jang, B.-W.; Kim, C.-G. Impact localization on a composite stiffened panel using reference signals with efficient training process. Compos. Part B Eng. 2016, 94, 271–285. [Google Scholar] [CrossRef]
- Li, H.; Wang, Z.; Forrest, J.Y.-L.; Jiang, W. Low-Velocity Impact Localization on Composites Under Sensor Damage by Interpolation Reference Database and Fuzzy Evidence Theory. IEEE Access 2018, 6, 31157–31168. [Google Scholar] [CrossRef]
- Park, J.; Ha, S.; Chang, F.-K. Monitoring Impact Events Using a System-Identification Method. AIAA J. 2009, 47, 2011–2021. [Google Scholar] [CrossRef]
- Shrestha, P.; Park, Y.; Kwon, H.; Kim, C.-G. Error outlier with weighted Median Absolute Deviation threshold algorithm and FBG sensor based impact localization on composite wing structure. Compos. Struct. 2017, 180, 412–419. [Google Scholar] [CrossRef]
- Sh Sharif Khodaei, Z.; Ferri Aliabadi, M.H. Impact Detection and Identification with Piezoceramic Sensors: Passive Sensing. In Computational and Experimental Methods in Structures; WORLD SCIENTIFIC: Singapore, 2018; Volume 08, pp. 215–265. ISBN 978-1-78634-392-5. [Google Scholar]
- Kundu, T.; Das, S.; Jata, K.V. An improved technique for locating the point of impact from the acoustic emission data. In Health Monitoring of Structural and Biological Systems 2007; Kundu, T., Ed.; International Society for Optics and Photonics: San Diego, CA, USA, 2007; Volume 6532, p. 65320M. [Google Scholar]
- Kundu, T.; Nakatani, H.; Takeda, N. Acoustic source localization in anisotropic plates. Ultrasonics 2012, 52, 740–746. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.; Parvasi, S.M.; Ho, S.C.M.; Patil, D.; Ge, M.; Li, H.; Song, G. An innovative method for automatic determination of time of arrival for Lamb waves excited by impact events. Smart Mater. Struct. 2017, 26, 055013. [Google Scholar] [CrossRef]
- Al-Jumaili, S.K.; Pearson, M.R.; Holford, K.M.; Eaton, M.J.; Pullin, R. Acoustic emission source location in complex structures using full automatic delta T mapping technique. Mech. Syst. Sig. Process. 2016, 72/73, 513–524. [Google Scholar] [CrossRef]
- Ciampa, F.; Meo, M. Impact detection in anisotropic materials using a time reversal approach. Struct. Health Monit. 2012, 11, 43–49. [Google Scholar] [CrossRef]
- Seno, A.H.; Sharif Khodaei, Z.; Aliabadi, M.H.F. Passive sensing method for impact localisation in composite plates under simulated environmental and operational conditions. Mech. Syst. Sig. Process. 2019, 129, 20–36. [Google Scholar] [CrossRef]
- Mallardo, V.; Aliabadi, M.H.; Khodaei, Z.S. Optimal sensor positioning for impact localization in smart composite panels. J. Intell. Mater. Syst. Struct. 2013, 24, 559–573. [Google Scholar] [CrossRef]
- Sanchez, N.; Meruane, V.; Ortiz-Bernardin, A. A novel impact identification algorithm based on a linear approximation with maximum entropy. Smart Mater. Struct. 2016, 25, 095050. [Google Scholar] [CrossRef]
- Salmanpour, M.S.; Sharif Khodaei, Z.; Aliabadi, M.H.F. Impact Damage Localisation with Piezoelectric Sensors under Operational and Environmental Conditions. Sensors 2017, 17, 1178. [Google Scholar] [CrossRef]
- Croxford, A.J.; Moll, J.; Wilcox, P.D.; Michaels, J.E. Efficient temperature compensation strategies for guided wave structural health monitoring. Ultrasonics 2010, 50, 517–528. [Google Scholar] [CrossRef]
- Ha, S.; Lonkar, K.; Mittal, A.; Chang, F.-K. Adhesive Layer Effects on PZT-induced Lamb Waves at Elevated Temperatures. Struct. Health Monit. Int. J. 2010, 9, 247–256. [Google Scholar] [CrossRef]
- Sung, D.-U.; Oh, J.-H.; Kim, C.-G.; Hong, C.-S. Impact Monitoring of Smart Composite Laminates Using Neural Network and Wavelet Analysis. J. Intell. Mater. Syst. Struct. 2000, 11, 180–190. [Google Scholar] [CrossRef]
- Kim, I.-G.; Lee, H.-Y.; Kim, J.-W. Impact Damage Detection in Composite Laminates Using PVDF and PZT Sensor Signals. J. Intell. Mater. Syst. Struct. 2005, 16, 1007–1013. [Google Scholar] [CrossRef]
- Caprino, G.; Lopresto, V.; Leone, C.; Papa, I. Acoustic emission source location in unidirectional carbon-fiber-reinforced plastic plates with virtually trained artificial neural networks. J. Appl. Polym. Sci. 2011, 122, 3506–3513. [Google Scholar] [CrossRef]
- Jang, B.-W.; Kim, C.-G. Impact localization of composite stiffened panel with triangulation method using normalised magnitudes of fiber optic sensor signals. Compos. Struct. 2019, 211, 522–529. [Google Scholar] [CrossRef]
- Maeda, N. A method for reading and checking phase times in autoprocessing system of seismic wave data. Zisin 1985, 38, 365–379. [Google Scholar] [CrossRef]
- Stevenson, P.R. Microearthquakes At Flathead Lake, Montana: A Study Using Automatic Earthquake Processing. Bull. Seismol. Soc. Am. 1976, 66, 61–80. [Google Scholar]
- Allen, R.V. Automatic Phase Pickers: Their Present Use and Future Prospects. Bull. Seismol. Soc. Am. 1982, 72, S225–S242. [Google Scholar]
- Shang, X.; Li, X.; Morales-Esteban, A.; Dong, L. An Improved P-Phase Arrival Picking Method S/L-K-A with an Application to the Yongshaba Mine in China. Pure Appl. Geophys. 2018, 175, 2121–2139. [Google Scholar] [CrossRef]
- Hossain, M.S.; Ong, Z.C.; Ismail, Z.; Noroozi, S.; Khoo, S.Y. Artificial neural networks for vibration based inverse parametric identifications: A review. Appl. Soft Comput. 2017, 52, 203–219. [Google Scholar] [CrossRef]
- Jang, B.-W.; Lee, Y.-G.; Kim, J.-H.; Kim, Y.-Y.; Kim, C.-G. Real-time impact identification algorithm for composite structures using fiber Bragg grating sensors. Struct. Control Hlth. 2012, 19, 580–591. [Google Scholar] [CrossRef]
- Kim, J.-H.; Kim, Y.-Y.; Park, Y.; Kim, C.-G. Low-velocity impact localization in a stiffened composite panel using a normalised cross-correlation method. Smart Mater. Struct. 2015, 24, 045036. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Case Name | Parameters1 | Number of Samples | Energy (J) |
|---|---|---|---|---|
| F1 | Reference Impact Case | Head = steel, h = 25, a = 90, m = 100, T = RT, n = none | 140 (loc. 1-35 x 4 rep.) | 0.025 |
| F2 | Increased Impact Height | Head = steel, h = 50, a = 90, m = 100, T = RT, n = none | 140 (loc. 1-35 x 4 rep.) | 0.050 |
| F3 | Angled Impact | Head = steel, h = 25, a = 45, m = 100, T = RT, n = none | 140 (loc. 1-35 x 4 rep.) | 0.025 |
| F4 | Increased Impact Mass | Head = steel, h = 25, a = 90, m = 200, T = RT, n = none | 140 (loc. 1-35 x 4 rep.) | 0.050 |
| F5 | Increased Impact Temperature | Head = steel, h = 25, a = 90, m = 100, T = 65, n = none | 140 (loc. 1-35 x 4 rep.) | 0.025 |
| F6 | Intermediate Impact Locations | Head = steel, h = 25, a = 90, m = 100, T = RT, n = none | 48 (int. loc. 1-12 x 4 rep.) | 0.025 |
| F7 | Reference Case + Artificial Noise | Head = steel, h = 25, a = 90, m = 100, T = RT, n = 500Hz 3V | 140 (loc. 1-35 x 4 rep.) | 0.025 |
| F8 | Soft Impact | Head = silicone, h = 50, a = 90, m = 100, T = RT, n = none | 140 (loc. 1-35 x 4 rep.) | 0.050 |
| F9 | Soft Impact + Artificial Noise | Head = silicone, h = 50, a = 90, m = 100, T = RT, n = 500Hz 0.1V | 140 (loc. 1-35 x 4 rep.) | 0.050 |
| Case | Case name | Parameters1 | Number of Samples | Energy (J) |
|---|---|---|---|---|
| C1 | Reference Impact Case | Head = steel, h = 25, a = 90, m = 100, T = RT, n = none | 100 (loc. 1-25 x 3 rep.) | 0.025 |
| C2 | Angled Impact | Head = steel, h = 25, a = 45, m = 100, T = RT, n = none | 100 (loc. 1-25 x 4 rep.) | 0.025 |
| C3 | Increased Impact Mass | Head = steel, h = 25, a = 90, m = 200, T = RT, n = none | 100 (loc. 1-25 x 4 rep.) | 0.050 |
| C4 | Reference Case + Artificial Noise | Head = steel, h = 25, a = 90, m = 100, T = RT, n = 500Hz 3V | 100 (loc. 1-25 x 4 rep.) | 0.025 |
| C5 | Soft Impact | Head = silicone, h = 50, a = 90, m = 100, T = RT, n = none | 100 (loc. 1-25 x 4 rep.) | 0.050 |
| C6 | Soft Impact + Artificial Noise | Head = silicone, h = 50, a = 90, M = 100, T = RT, n = 500Hz 0.1V | 100 (loc. 1-25 x 4 rep.) | 0.050 |
| Test Impact Case | Noise Filtering | Feature Used | Localisation Method | Training/Reference Database1 |
|---|---|---|---|---|
| Soft impact (F8 and C5) | No | ToA (NSET) | ANN, 1 × 12 hidden layer | F1 and C1 |
| Soft impact (F8 and C5) | No | ToA (NSET) | Database, 6 sensors | F1 and C1 |
| Soft impact (F8 and C5) | No | ToA (NSET) | Database, 5 sensor comb. | F1 and C1 |
| Soft impact (F8 and C5) | No | ToA (NSET) | Database, 4 sensor comb. | F1 and C1 |
| Soft impact (F8 and C5) | No | ToA (NSET) | Database, 3 sensor comb. | F1 and C1 |
| Test Impact Case | Noise Filtering | Feature Used | Localisation Method | Training/Reference Database1 |
|---|---|---|---|---|
| Soft impact (F8 and C5) | No | ToA (NSET) | ANN, 1x12 hidden layer | F1 and C1 |
| Soft impact (F8 and C5) | No | ToA (NSET) | Database, 5 sensor comb. | F1 and C1 |
| Soft impact (F8 and C5) | No | ToA (S/L TA - AIC) | Database, 5 sensor comb. | F1 and C1 |
| Soft impact (F8 and C5) | No | Min. amp. ratio | Database, 5 sensor comb. | F1 and C1 |
| Soft impact (F8 and C5) | No | ToA (S/L TA - AIC) + Min. amp. ratio | Database, 5 sensor comb. | F1 and C1 |
| Test Impact Case | Case ID | Noise Filtering | Reference Method a | Proposed Method b | Training/ Reference Database c |
|---|---|---|---|---|---|
| Reference Impact Case | F1 and C1 | >700 Hz | Yes | Yes | F1 and C1 |
| Increased Impact Height | F2 | >700 Hz | Yes | Yes | F1 and C1 |
| Angled Impact | F3 and C2 | >700 Hz | Yes | Yes | F1 and C1 |
| Increased Impact Mass | F4 and C3 | >700 Hz | Yes | Yes | F1 and C1 |
| Increased Impact Temperature | F5 | >700 Hz | Yes | Yes | F1 and C1 |
| Intermediate Impact Locations | F6 | >700 Hz | Yes | Yes | F1 and C1 |
| Reference Case + Artificial Noise | F7 and C4 | >700 Hz | Yes | Yes | F1 and C1 |
| Soft Impact | F8 and C5 | >700 Hz | - | Yes | F1 and C1 |
| Soft Impact + Artificial Noise | F9 and C6 | >700 Hz | - | Yes | F1 and C1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seno, A.H.; Aliabadi, M.H.F. Impact Localisation in Composite Plates of Different Stiffness Impactors under Simulated Environmental and Operational Conditions. Sensors 2019, 19, 3659. https://doi.org/10.3390/s19173659
Seno AH, Aliabadi MHF. Impact Localisation in Composite Plates of Different Stiffness Impactors under Simulated Environmental and Operational Conditions. Sensors. 2019; 19(17):3659. https://doi.org/10.3390/s19173659
Chicago/Turabian StyleSeno, Aldyandra Hami, and M.H. Ferri Aliabadi. 2019. "Impact Localisation in Composite Plates of Different Stiffness Impactors under Simulated Environmental and Operational Conditions" Sensors 19, no. 17: 3659. https://doi.org/10.3390/s19173659
APA StyleSeno, A. H., & Aliabadi, M. H. F. (2019). Impact Localisation in Composite Plates of Different Stiffness Impactors under Simulated Environmental and Operational Conditions. Sensors, 19(17), 3659. https://doi.org/10.3390/s19173659