Wearable Sensor Based Stooped Posture Estimation in Simulated Parkinson’s Disease Gaits


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
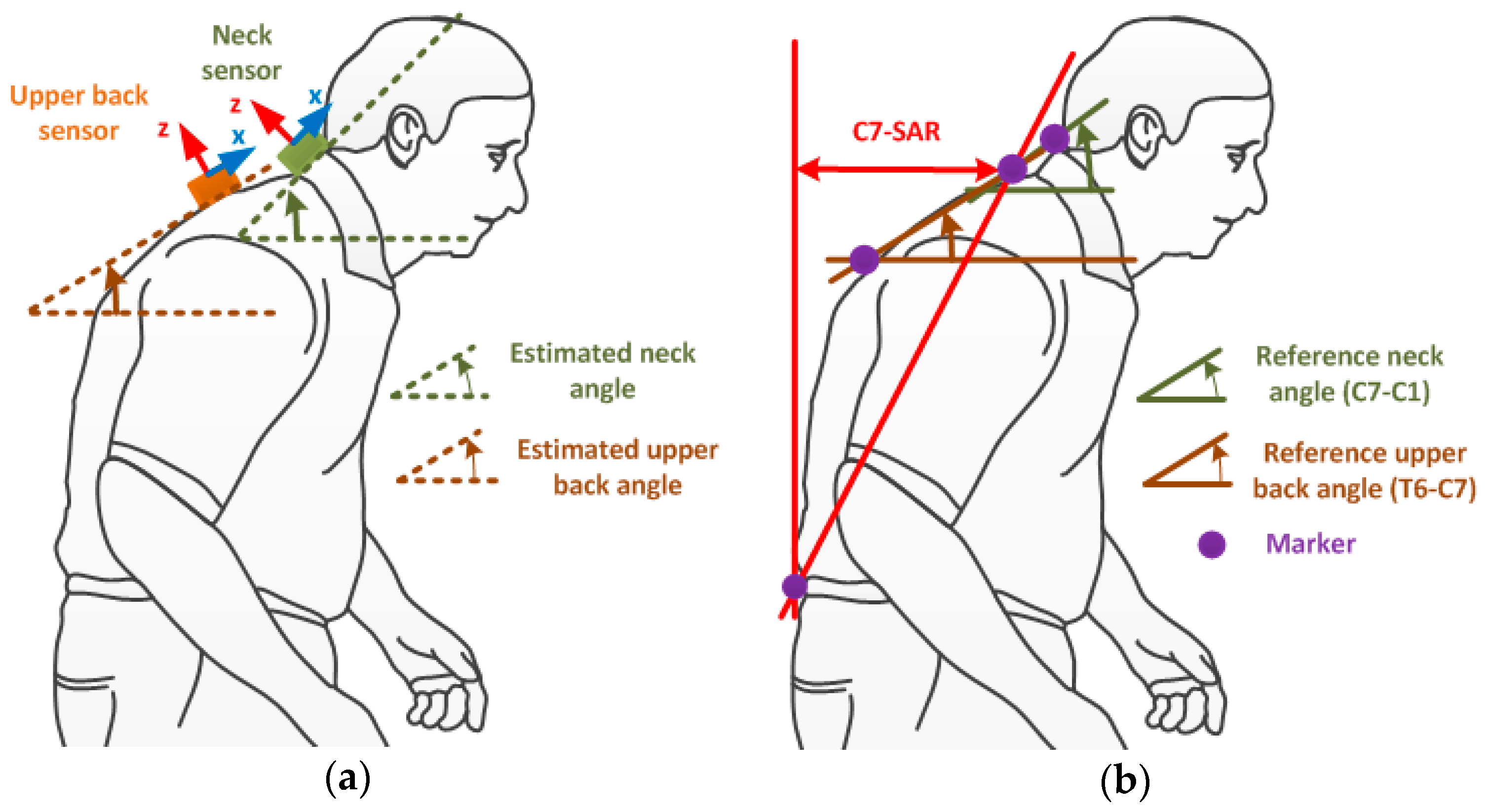
2.1. Measurement Principle
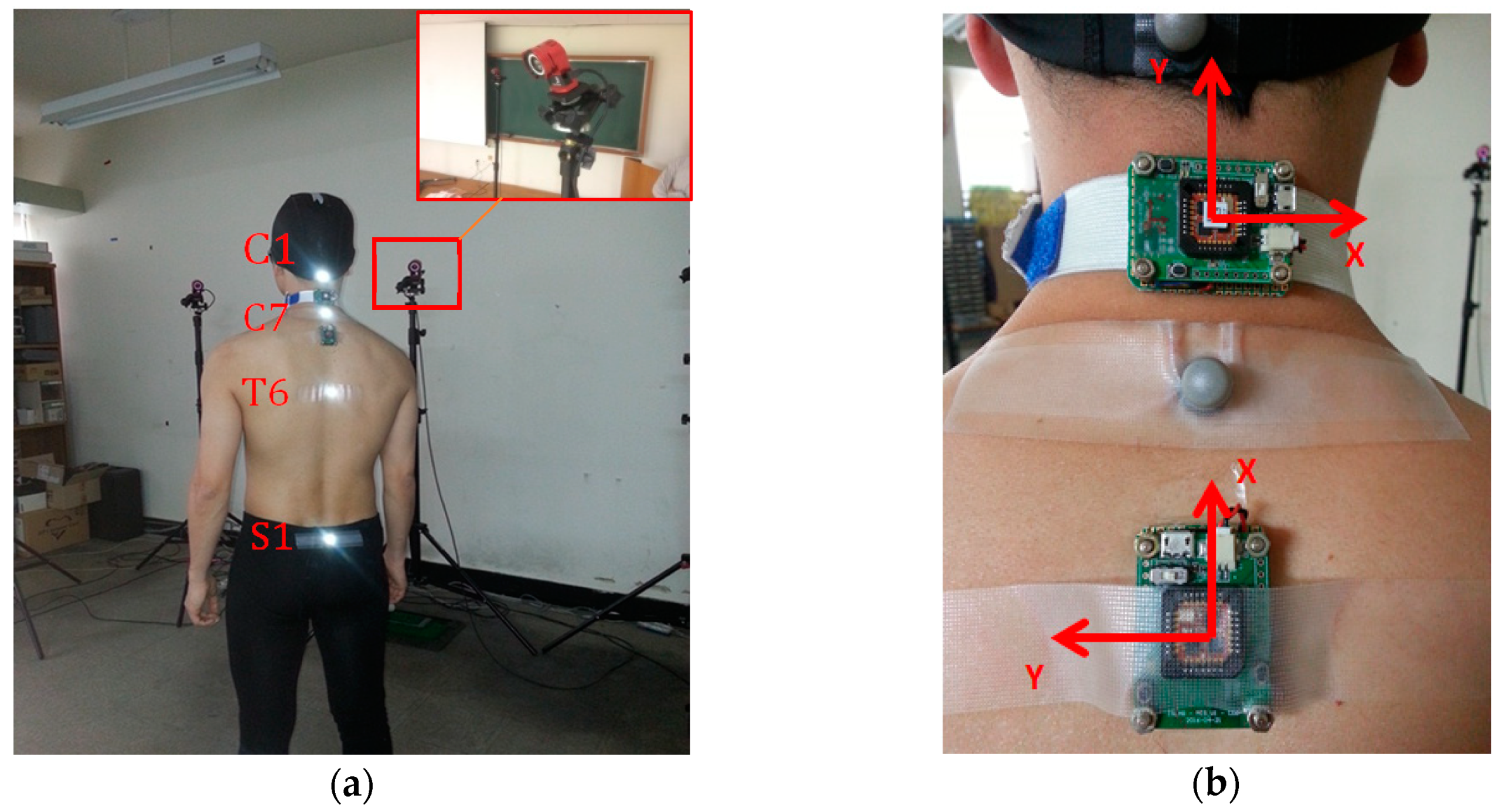
2.2. Experiment Setup
- (1)
- Slow PD gait while maintaining SP with tremor
- (2)
- Fast PD gait while maintaining SP with tremor
- (3)
- Slow PD gait while changing SP with tremor
- (4)
- Fast PD gait while changing SP with tremor
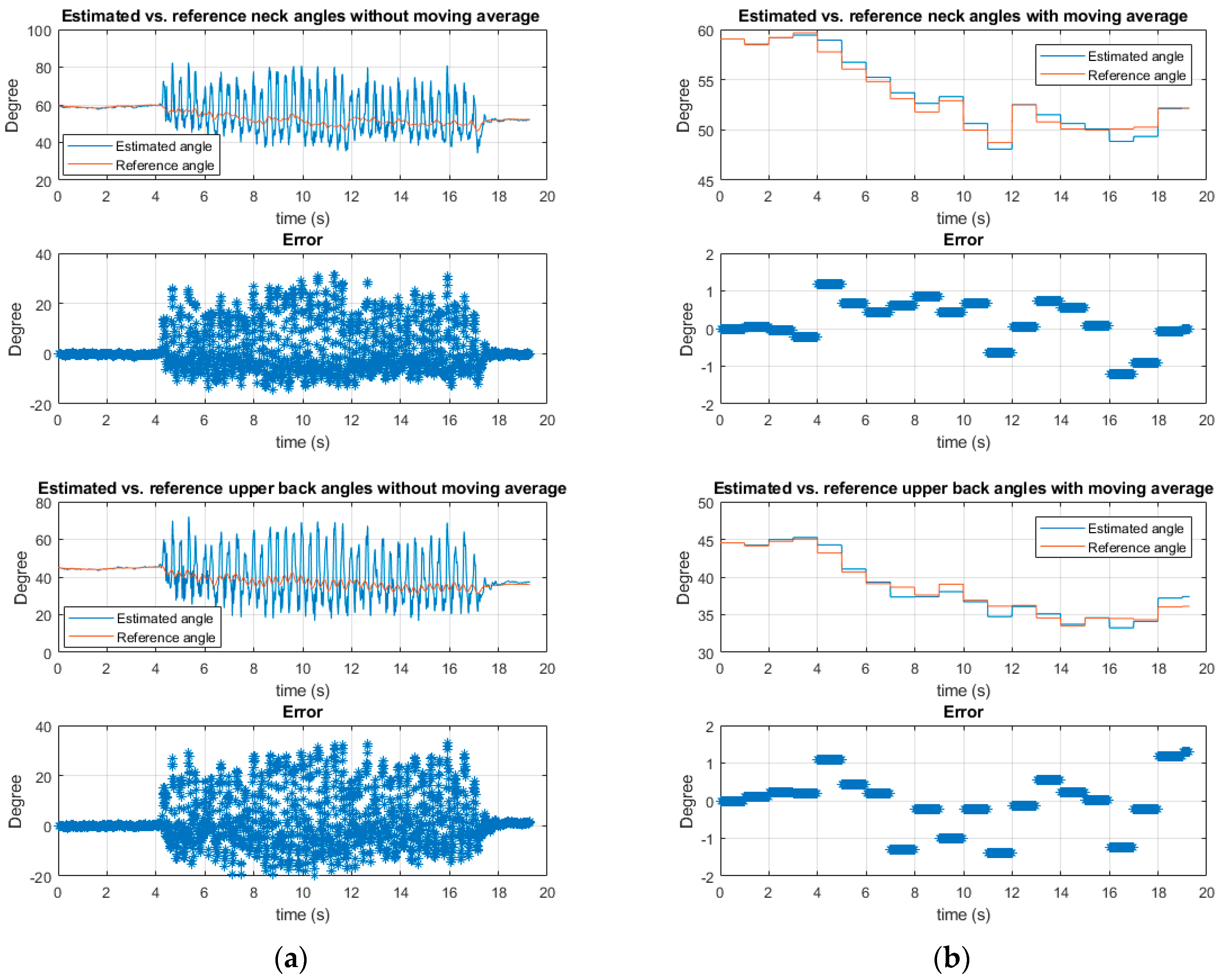
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Djaldetti, R.; Mosberg-Galili, R.; Sroka, H.; Merims, D.; Melamed, E. Camptocormia (Bent Spine) in Patients with Parkinson’s Disease—Characterization and Possible Pathogenesis of an Unusual Phenomenon. Mov. Disord. Off. J. Mov. Disord. Soc. 1999, 14, 443–447. [Google Scholar] [CrossRef]
- Jankovic, J. Parkinson’s Disease: Clinical Features and Diagnosis. J. Neurol. Neurosurg. Psychiatry 2008, 79, 368–376. [Google Scholar] [CrossRef] [PubMed]
- Margraf, N.G.; Granert, O.; Hampel, J.; Wrede, A.; Schulz-Schaeffer, W.J.; Deuschl, G. Clinical Definition of Camptocormia in Parkinson’s Disease. Mov. Disord. Clin. Pract. 2017, 4, 349–357. [Google Scholar] [CrossRef] [PubMed]
- Yoshii, F.; Moriya, Y.; Ohnuki, T.; Ryo, M.; Takahashi, W. Postural Deformities in Parkinson’s Disease–Mutual Relationships among Neck Flexion, Fore-Bent, Knee-Bent and Lateral-Bent Angles and Correlations with Clinical Predictors. J. Clin. Mov. Disord. 2016, 3, 1. [Google Scholar] [CrossRef] [PubMed]
- De Sèze, M.-P.; Creuzé, A.; De Sèze, M.; Mazaux, J.M. An Orthosis and Physiotherapy Programme for Camptocormia: A Prospective Case Study. J. Rehabil. Med. 2008, 40, 761–765. [Google Scholar] [CrossRef] [PubMed]
- Srivanitchapoom, P.; Hallett, M. Camptocormia in Parkinson’s Disease: Definition, Epidemiology, Pathogenesis and Treatment Modalities. J. Neurol. Neurosurg. Psychiatry 2016, 87, 75–85. [Google Scholar] [CrossRef] [PubMed]
- Wadia, P.M.; Tan, G.; Munhoz, R.P.; Fox, S.H.; Lewis, S.J.; Lang, A.E. Surgical Correction of Kyphosis in Patients with Camptocormia Due to Parkinson’s Disease: A Retrospective Evaluation. J. Neurol. Neurosurg. Psychiatry 2011, 82, 364–368. [Google Scholar] [CrossRef]
- Ho, B.; Prakash, R.; Morgan, J.C.; Sethi, K.D. A Case of Levodopa-Responsive Camptocormia Associated with Advanced Parkinson’s Disease. Nat. Rev. Neurol. 2007, 3, 526–530. [Google Scholar] [CrossRef]
- Von Coelln, R.; Raible, A.; Gasser, T.; Asmus, F. Ultrasound-Guided Injection of the Iliopsoas Muscle with Botulinum Toxin in Camptocormia. Mov. Disord. 2008, 23, 889–892. [Google Scholar] [CrossRef]
- Furusawa, Y.; Mukai, Y.; Kawazoe, T.; Sano, T.; Nakamura, H.; Sakamoto, C.; Iwata, Y.; Wakita, M.; Nakata, Y.; Kamiya, K. Long-Term Effect of Repeated Lidocaine Injections into the External Oblique for Upper Camptocormia in Parkinson’s Disease. Parkinsonism Relat. Disord. 2013, 19, 350–354. [Google Scholar] [CrossRef]
- Finsterer, J.; Strobl, W. Presentation, Etiology, Diagnosis, and Management of Camptocormia. Eur. Neurol. 2010, 64, 1–8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gerton, B.K.; Theeler, B.; Samii, A. Backpack Treatment for Camptocormia. Mov. Disord. 2010, 25, 247–248. [Google Scholar] [CrossRef] [PubMed]
- Tomlinson, C.L.; Patel, S.; Meek, C.; Clarke, C.E.; Stowe, R.; Shah, L.; Sackley, C.M.; Deane, K.; Herd, C.P.; Wheatley, K. Physiotherapy Versus Placebo or No Intervention in Parkinson’s Disease. Cochrane Database Syst. Rev. 2012, 8, CD002817. [Google Scholar]
- Seel, T.; Raisch, J.; Schauer, T. Imu-Based Joint Angle Measurement for Gait Analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [PubMed]
- Agostini, V.; Gastaldi, L.; Rosso, V.; Knaflitz, M.; Tadano, S. A Wearable Magneto-Inertial System for Gait Analysis (H-Gait): Validation on Normal Weight and Overweight/Obese Young Healthy Adults. Sensors 2017, 17, 2406. [Google Scholar] [CrossRef] [PubMed]
- Tognetti, A.; Lorussi, F.; Carbonaro, N.; De Rossi, D. Wearable Goniometer and Accelerometer Sensory Fusion for Knee Joint Angle Measurement in Daily Life. Sensors 2015, 15, 28435–28455. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mileti, I.; Germanotta, M.; Di Sipio, E.; Imbimbo, I.; Pacilli, A.; Erra, C.; Petracca, M.; Rossi, S.; Del Prete, Z.; Bentivoglio, A.R. Measuring Gait Quality in Parkinson’s Disease Through Real-Time Gait Phase Recognition. Sensors 2018, 18, 919. [Google Scholar] [CrossRef]
- Azevedo Coste, C.; Sijobert, B.; Pissard-Gibollet, R.; Pasquier, M.; Espiau, B.; Geny, C. Detection of Freezing of Gait in Parkinson Disease: Preliminary Results. Sensors 2014, 14, 6819–6827. [Google Scholar] [CrossRef] [Green Version]
- De Sèze, M.P.; Guillaud, E.; Slugacz, L.; Cazalets, J.R. An Examination of Camptocormia Assessment by Dynamic Quantification of Sagittal Posture. J. Rehabil. Med. 2015, 47, 72–79. [Google Scholar] [CrossRef]
- Mirek, E.; Kubica, J.L.; Szymura, J.; Pasiut, S.; Rudzińska, M.; Chwała, W. Assessment of Gait Therapy Effectiveness in Patients with Parkinson’s Disease on the Basis of Three-Dimensional Movement Analysis. Front. Neurol. 2016, 7, 102. [Google Scholar] [CrossRef]
- Galna, B.; Barry, G.; Jackson, D.; Mhiripiri, D.; Olivier, P.; Rochester, L. Accuracy of the Microsoft Kinect Sensor for Measuring Movement in People with Parkinson’s Disease. Gait Posture 2014, 39, 1062–1068. [Google Scholar] [CrossRef] [PubMed]
- Falvo, M.J.; Earhart, G.M. Six-Minute Walk Distance in Persons with Parkinson Disease: A Hierarchical Regression Model. Arch. Phys. Med. Rehabil. 2009, 90, 1004–1008. [Google Scholar] [CrossRef] [PubMed]
- Siminoski, K.; Warshawski, R.; Jen, H.; Lee, K. The Accuracy of Clinical Kyphosis Examination for Detection of Thoracic Vertebral Fractures: Comparison of Direct and Indirect Kyphosis Measures. J. Musculoskelet. Neuronal Interact. 2011, 11, 249–256. [Google Scholar] [PubMed]
- Fisher, C.J. Using an Accelerometer for Inclination Sensing. An-1057, Application Note, Analog Devices 2010. Available online: http://hamblen.ece.gatech.edu/489X/F13PROJ/SpeedControl/Important_files/Inclination_Acce.pdf (accessed on 6 January 2019).
- Jang, W.; Han, J.; Park, J.; Kim, J.; Cho, J.; Koh, S.; Chung, S.; Kim, I.; Kim, H. Waveform Analysis of Tremor May Help to Differentiate Parkinson’s Disease from Drug-Induced Parkinsonism. Physiol. Meas. 2013, 34, N15. [Google Scholar] [CrossRef] [PubMed]
- Orendurff, M.S.; Segal, A.D.; Klute, G.K.; Berge, J.S.; Rohr, E.S.; Kadel, N.J. The Effect of Walking Speed on Center of Mass Displacement. J. Rehabil. Res. Dev. 2004, 41, 829–834. [Google Scholar] [CrossRef] [PubMed]
- Roze, E.; Coêlho-Braga, M.C.; Gayraud, D.; Legrand, A.P.; Trocello, J.M.; Fénelon, G.; Cochen, V.; Patte, N.; Viallet, F.; Vidailhet, M. Head Tremor in Parkinson’s Disease. Mov. Disord. 2006, 21, 1245–1248. [Google Scholar] [CrossRef] [PubMed]
- Namu. Beat Text Neck: Alex Wearable Posture Tracker and Coach. Available online: https://Alexposture.Com/ (accessed on 29 December 2018).
- Upright Technologies. Upright Go—Your Personal Posture Trainer; Upright Technologies: Yehud, Israel, 2017. [Google Scholar]
- Doherty, K.M.; Van De Warrenburg, B.P.; Peralta, M.C.; Silveira-Moriyama, L.; Azulay, J.-P.; Gershanik, O.S.; Bloem, B.R. Postural Deformities in Parkinson’s Disease. Lancet Neurol. 2011, 10, 538–549. [Google Scholar] [CrossRef]
- Hausdorff, J.M. Gait Dynamics in Parkinson’s Disease: Common and Distinct Behavior Among Stride Length, Gait Variability, and Fractal-Like Scaling. Chaos Interdiscip. J. Nonlinear Sci. 2009, 19, 026113. [Google Scholar] [CrossRef]
- Termoz, N.; Halliday, S.E.; Winter, D.A.; Frank, J.S.; Patla, A.E.; Prince, F. The Control of Upright Stance in Young, Elderly and Persons with Parkinson’s Disease. Gait Posture 2008, 27, 463–470. [Google Scholar] [CrossRef]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, Q.K.; Seo, H.G.; Pham, D.D.; Chee, Y. Wearable Sensor Based Stooped Posture Estimation in Simulated Parkinson’s Disease Gaits. Sensors 2019, 19, 223. https://doi.org/10.3390/s19020223
Dang QK, Seo HG, Pham DD, Chee Y. Wearable Sensor Based Stooped Posture Estimation in Simulated Parkinson’s Disease Gaits. Sensors. 2019; 19(2):223. https://doi.org/10.3390/s19020223
Chicago/Turabian StyleDang, Quoc Khanh, Han Gil Seo, Duy Duong Pham, and Youngjoon Chee. 2019. "Wearable Sensor Based Stooped Posture Estimation in Simulated Parkinson’s Disease Gaits" Sensors 19, no. 2: 223. https://doi.org/10.3390/s19020223
APA StyleDang, Q. K., Seo, H. G., Pham, D. D., & Chee, Y. (2019). Wearable Sensor Based Stooped Posture Estimation in Simulated Parkinson’s Disease Gaits. Sensors, 19(2), 223. https://doi.org/10.3390/s19020223