Ultrasonic Flaw Echo Enhancement Based on Empirical Mode Decomposition

Abstract
:1. Introduction
2. Required Tools
2.1. EMD and EEMD
2.2. Denoising Strategies Based on EMD
2.3. Sample Entropy
2.4. Otsu’s Method for Thresholding
3. Analysis of Modes from Ultrasonic Signals
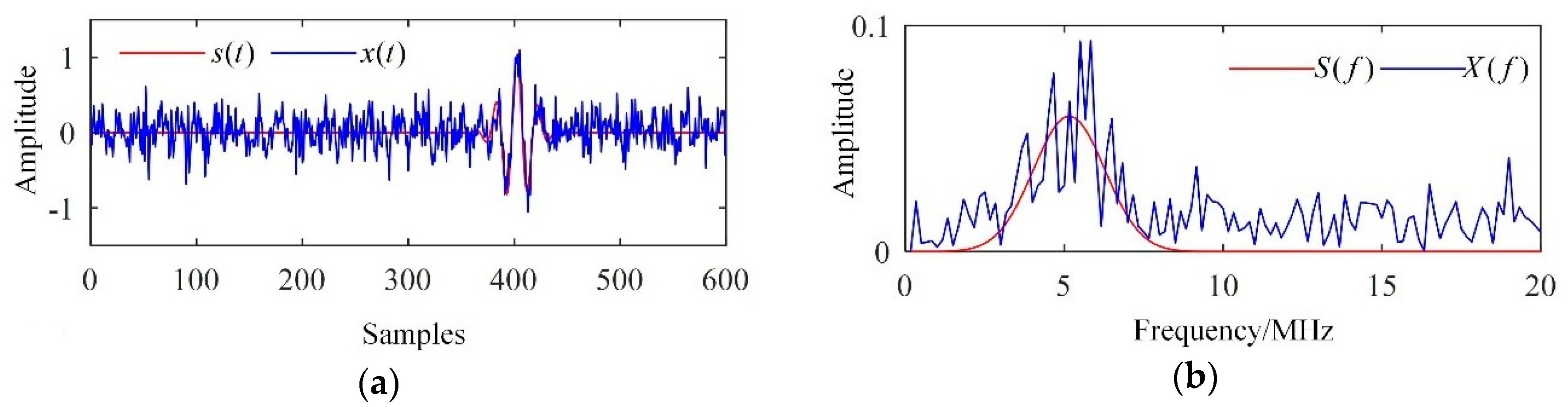
3.1. The Clutter Model
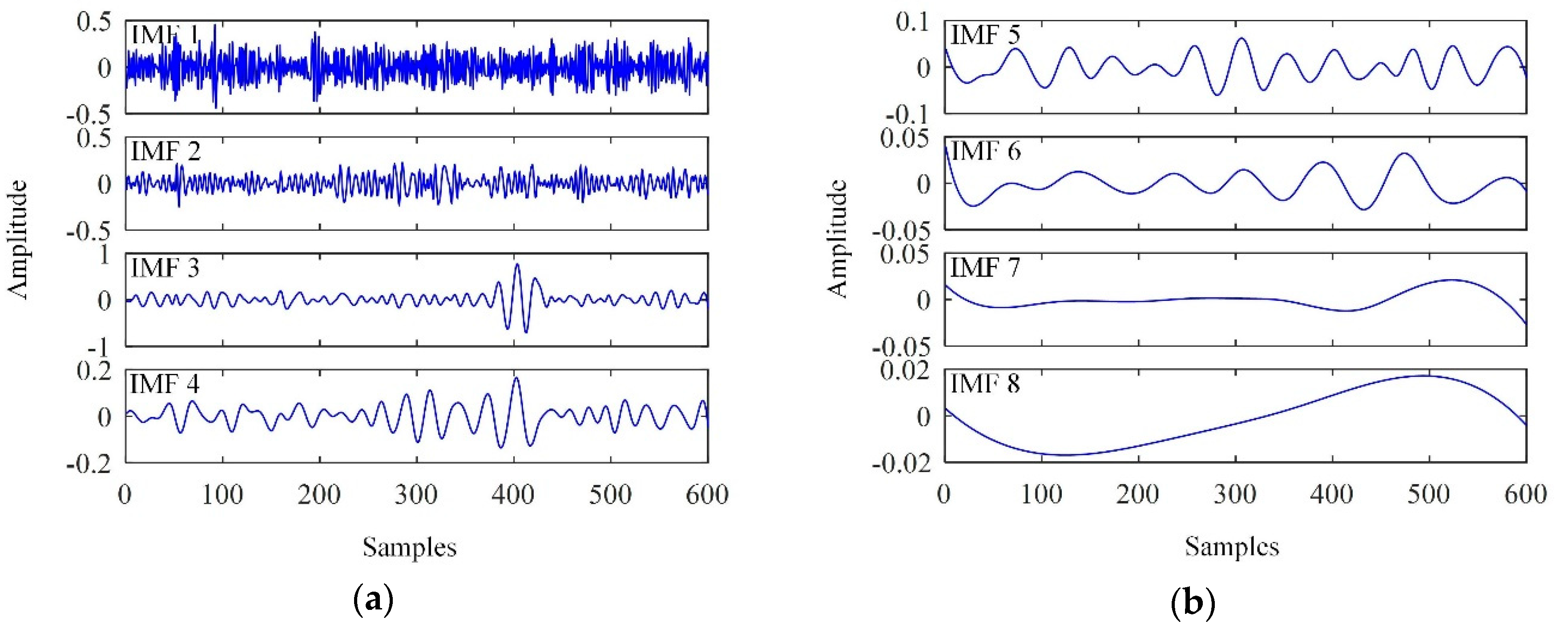
3.2. Signal Decomposition
3.3. SampEn Values of IMFs
4. Proposed Methodology
4.1. Relevant Mode Selection
4.2. Mixed Noise Suppression
4.3. Summarization of the Proposed Methodology
5. Simulated Signal Processing
5.1. Performance Assessment
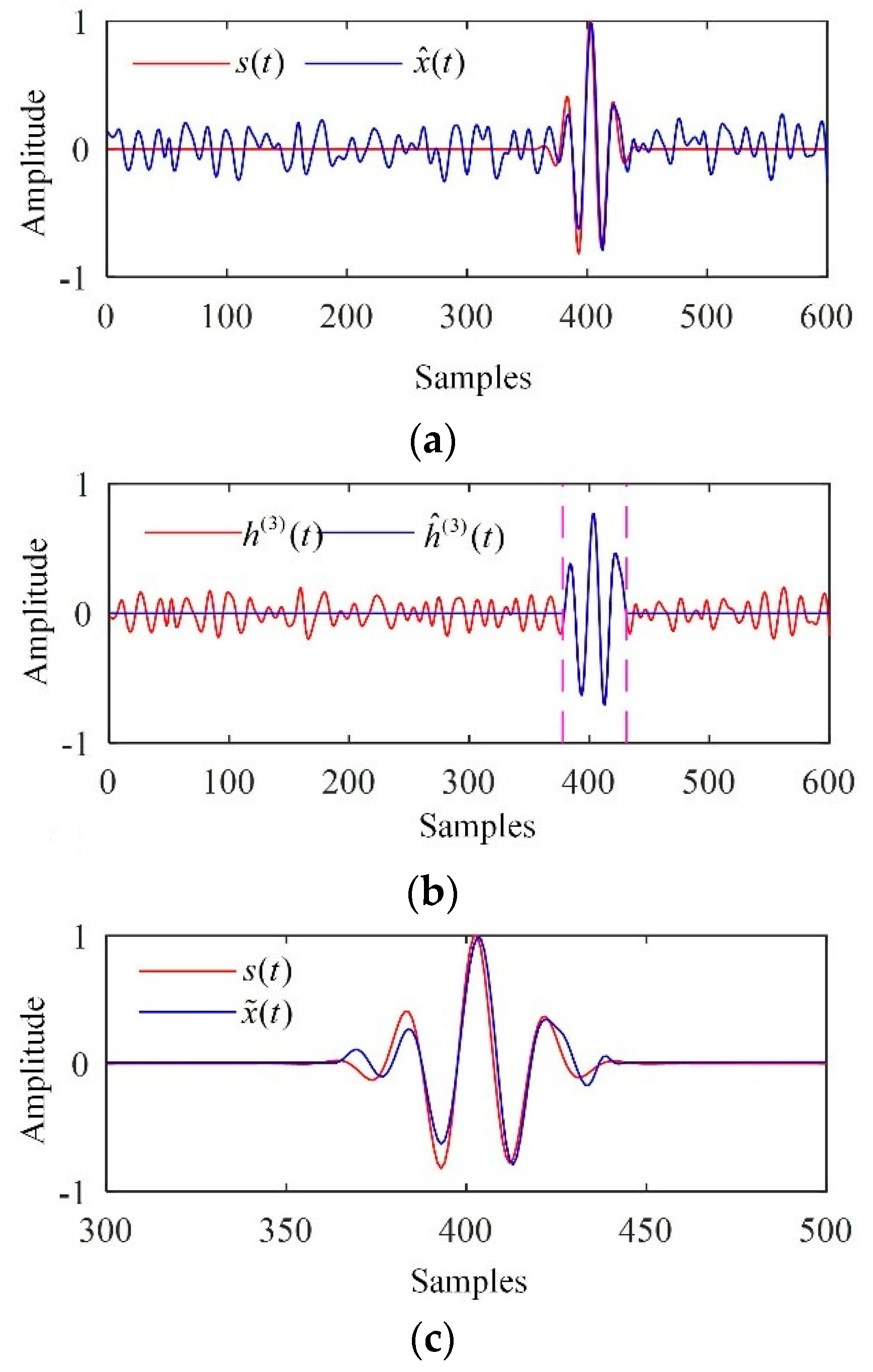
5.2. Signal Processing Results
6. Experimental Study
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shankar, P.M.; Karpur, P.; Newhouse, V.L.; Rose, J.L. Split-spectrum processing: Analysis of polarity threshold algorithm for improvement of signal-to-noise ratio and detectablity in ultrasonic signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1989, 36, 101–108. [Google Scholar] [CrossRef] [PubMed]
- Gustafsson, M.G.; Stepinski, T. Studies of split spectrum processing, optimal detection, and maximum likelihood amplitude estimation using a simple clutter model. Ultrasonics 1997, 35, 31–52. [Google Scholar] [CrossRef]
- Rodriguez, A.; Miralles, R.; Bosch, I.; Vergara, L. New analysis and extensions of split-spectrum processing algorithms. NDT E Int. 2012, 45, 141–147. [Google Scholar] [CrossRef]
- Jafar, S.; Daniel, T.N.; Kevin, D.D. Analysis of order statistic filters applied to ultrasonic flaw detection using split-spectrum processing. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1991, 38, 133–140. [Google Scholar] [CrossRef]
- Lazaro, J.C.; San Emeterio, J.L.; Ramos, A.; Fernandez-Marron, J.L. Influence of thresholding procedures in ultrasonic grain noise reduction using wavelets. Ultrasonics 2002, 40, 263–267. [Google Scholar] [CrossRef]
- Matz, V.; Smid, R.; Starman, S.; Kreidl, M. Signal-to-noise ratio enhancement based on wavelet filtering in ultrasonic testing. Ultrasonics 2009, 49, 752–759. [Google Scholar] [CrossRef] [Green Version]
- Peng, C.Y.; Gao, X.R.; Wang, A. Novel wavelet self-optimisation threshold denoising method in axle press-fit ultrasonic defect detection. Insight 2016, 58, 145–151. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Z.; Zhang, W. Crack detection of fibre reinforced composite beams based on continuous wavelet transform. Nondestruct. Test. Eval. 2010, 25, 25–44. [Google Scholar] [CrossRef]
- Chen, Y.C.; Zhou, X.J.; Yang, C.L.; Li, Z. The ultrasonic evaluation method for the porosity of variable-thickness curved CFRP workpiece: Using a numerical wavelet transform. Nondestruct. Test. Eval. 2014, 29, 195–207. [Google Scholar] [CrossRef]
- Praveen, A.; Vijayarekha, K.; Abraham, S.T.; Venkatraman, B. Signal quality enhancement using higher order wavelets for ultrasonic TOFD signals from austenitic stainless steel welds. Ultrasonics 2013, 53, 1288–1292. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Ari, S.; Das, M.K.; Chacko, A. ECG signal enhancement using S-Transform. Comput. Biol. Med. 2013, 43, 649–660. [Google Scholar] [CrossRef] [PubMed]
- Muhammad, A.M.; Jafar, S. S-transform applied to ultrasonic nondestructive testing. In Proceedings of the IEEE Ultrasonics Symposium, Beijing, China, 2–5 November 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 184–187. [Google Scholar] [CrossRef]
- Benammar, A.; Drai, R.; Guessoum, A. Ultrasonic flaw detection using threshold modified S-transform. Ultrasonics 2014, 54, 676–683. [Google Scholar] [CrossRef] [PubMed]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.N.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A-Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Gabriel, R.; Patrick, F. One or Two Frequencies? The empirical mode decomposition answers. IEEE Trans. Signal Process. 2008, 56, 85–95. [Google Scholar] [CrossRef]
- Kazys, R.; Tumsys, O.; Pagodinas, D. Ultrasonic detection of defects in strongly attenuating structures using the Hilbert–Huang transform. NDT E Int. 2008, 41, 457–466. [Google Scholar] [CrossRef]
- Abdel, O.B.; Jean, C.C. EMD-based signal filtering. IEEE Trans. Instrum. Meas. 2007, 56, 2196–2202. [Google Scholar] [CrossRef]
- Zhang, Q.; Que, P.W.; Liang, W. Applying sub-band energy extraction to noise cancellation of ultrasonic NDT signal. J. Zhejiang Univ. Sci. A 2008, 9, 1134–1140. [Google Scholar] [CrossRef]
- Yannis, K.; Stephen, M. Development of EMD-based denoising methods inspired by wavelet thresholding. IEEE Trans. Signal Process. 2009, 57, 1351–1362. [Google Scholar] [CrossRef]
- Yang, G.L.; Liu, Y.Y.; Wang, Y.Y.; Zhu, Z.L. EMD interval thresholding denoising based on similarity measure to select relevant modes. Signal Process. 2015, 109, 95–109. [Google Scholar] [CrossRef]
- Bouden, T.; Djerfi, F.; Nibouche, M. Adaptive split spectrum processing for ultrasonic signal in the pulse echo test. Russ. J. Nondestruct. Test. 2015, 51, 245–257. [Google Scholar] [CrossRef]
- Sharma, G.K.; Kumar, A.; Jayakumar, T.; Rao, B.P.; Mariyappa, N. Ensemble empirical mode decomposition based methodology for ultrasonic testing of coarse grain austenitic stainless steels. Ultrasonics 2015, 57, 167–178. [Google Scholar] [CrossRef] [PubMed]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef]
- Hu, X.S.; Jiang, J.C.; Cao, D.P.; Bo, E. Battery Health Prognosis for Electric Vehicles Using Sample Entropy and Sparse Bayesian Predictive Modeling. IEEE Trans. Ind. Electron. 2016, 63, 2645–2656. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Steven, M.P. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef]
- Jung, H.J.; Kim, H.J.; Song, S.J.; Kim, Y.H. Model-based enhancement of the TIFD for flaw signal identification in ultrasonic testing of welded joints. In Proceedings of the 29th Annual Review of Progress in Quantitative Nondestructive Evaluation, Western Washington University, Bellingham, WA, USA, 14–19 July 2002; Amer Inst Physics: College Park, MD, USA, 2002; pp. 628–634. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| r/SDu | 0.1 | 0.15 | 0.2 |
|---|---|---|---|
| s1 | 2.0121 | 1.7943 | 1.535 |
| s2 | 1.8823 | 1.4872 | 1.213 |
| s3 | 0.7224 | 0.6242 | 0.5682 |
| s4 | 0.646 | 0.5984 | 0.5616 |
| s5 | 0.5501 | 0.4921 | 0.4472 |
| s6 | 0.4717 | 0.3589 | 0.2708 |
| s7 | 0.1095 | 0.0821 | 0.065 |
| s8 | 0.0526 | 0.036 | 0.0276 |
| SNR/dB | MCC/ × 10−2 | |
|---|---|---|
| observed | −3.47 | 1.05 |
| partial reconstruction denoised | 1.81 9.42 | 0.06 0.06 |
| s1 | s2 | s3 | s4 | s5 |
|---|---|---|---|---|
| 1.4902 | 1.1739 | 0.5684 | 0.5508 | 0.4764 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, W.; Zhou, X.; Zeng, X.; Yang, C. Ultrasonic Flaw Echo Enhancement Based on Empirical Mode Decomposition. Sensors 2019, 19, 236. https://doi.org/10.3390/s19020236
Feng W, Zhou X, Zeng X, Yang C. Ultrasonic Flaw Echo Enhancement Based on Empirical Mode Decomposition. Sensors. 2019; 19(2):236. https://doi.org/10.3390/s19020236
Chicago/Turabian StyleFeng, Wei, Xiaojun Zhou, Xiang Zeng, and Chenlong Yang. 2019. "Ultrasonic Flaw Echo Enhancement Based on Empirical Mode Decomposition" Sensors 19, no. 2: 236. https://doi.org/10.3390/s19020236
APA StyleFeng, W., Zhou, X., Zeng, X., & Yang, C. (2019). Ultrasonic Flaw Echo Enhancement Based on Empirical Mode Decomposition. Sensors, 19(2), 236. https://doi.org/10.3390/s19020236