Detection of Voltage Anomalies in Spacecraft Storage Batteries Based on a Deep Belief Network


Abstract
:1. Introduction
2. Related Works
3. Process of the Anomaly-Detection Algorithm
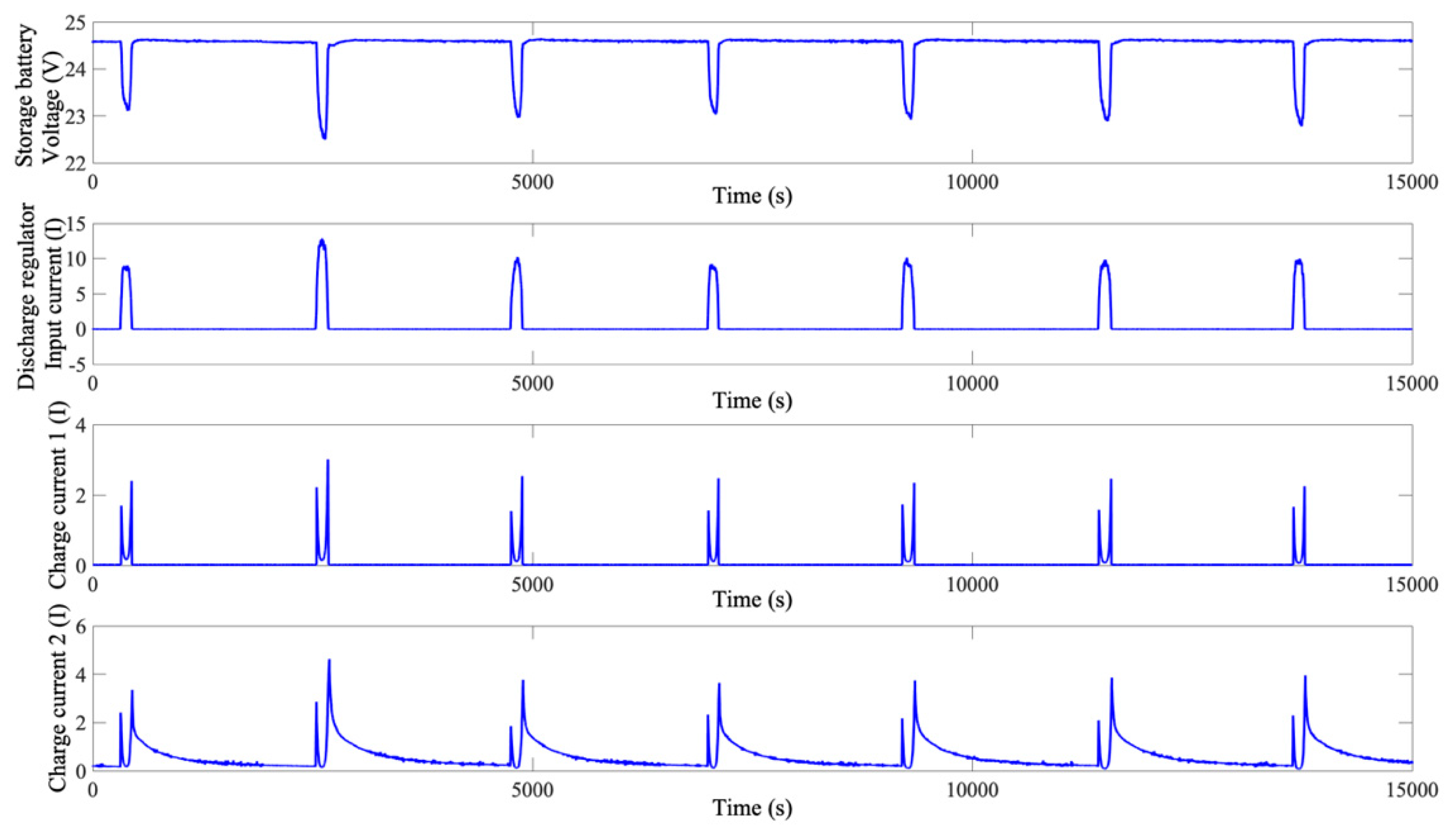
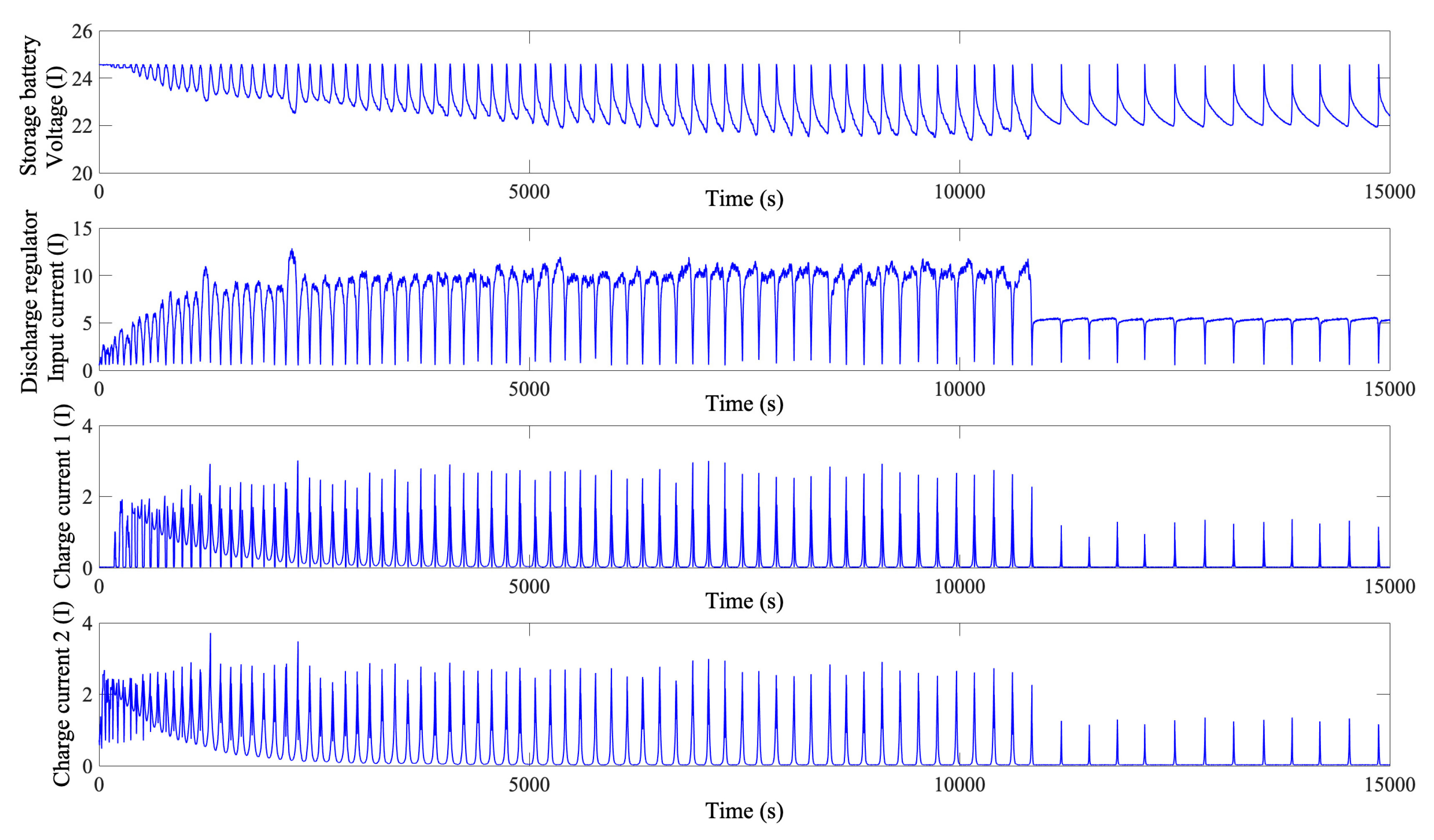
3.1. Parameter Extraction
3.2. Neural Network (NN) Model Determination
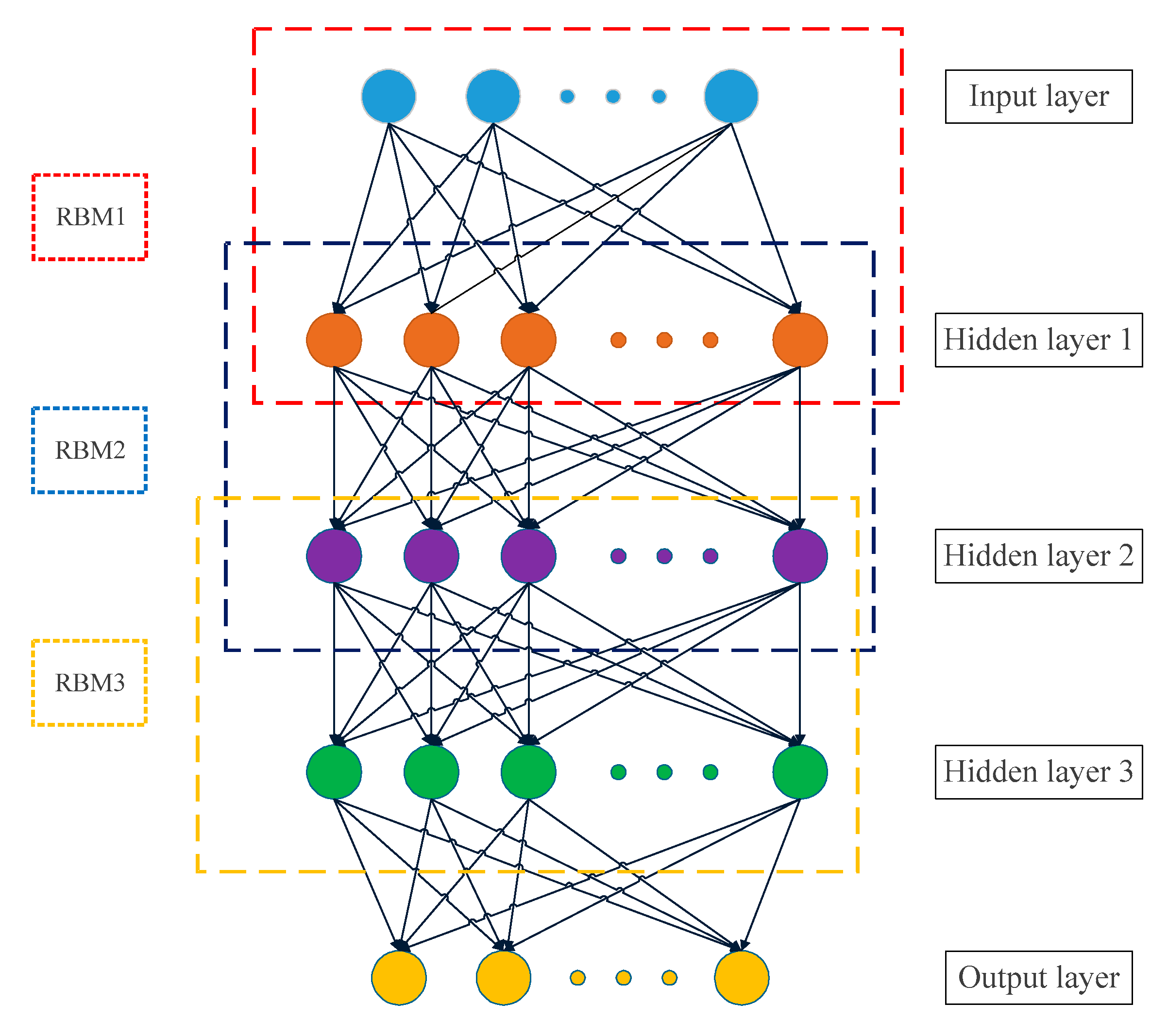
3.2.1. Introduction to Deep Belief Network (DBN)
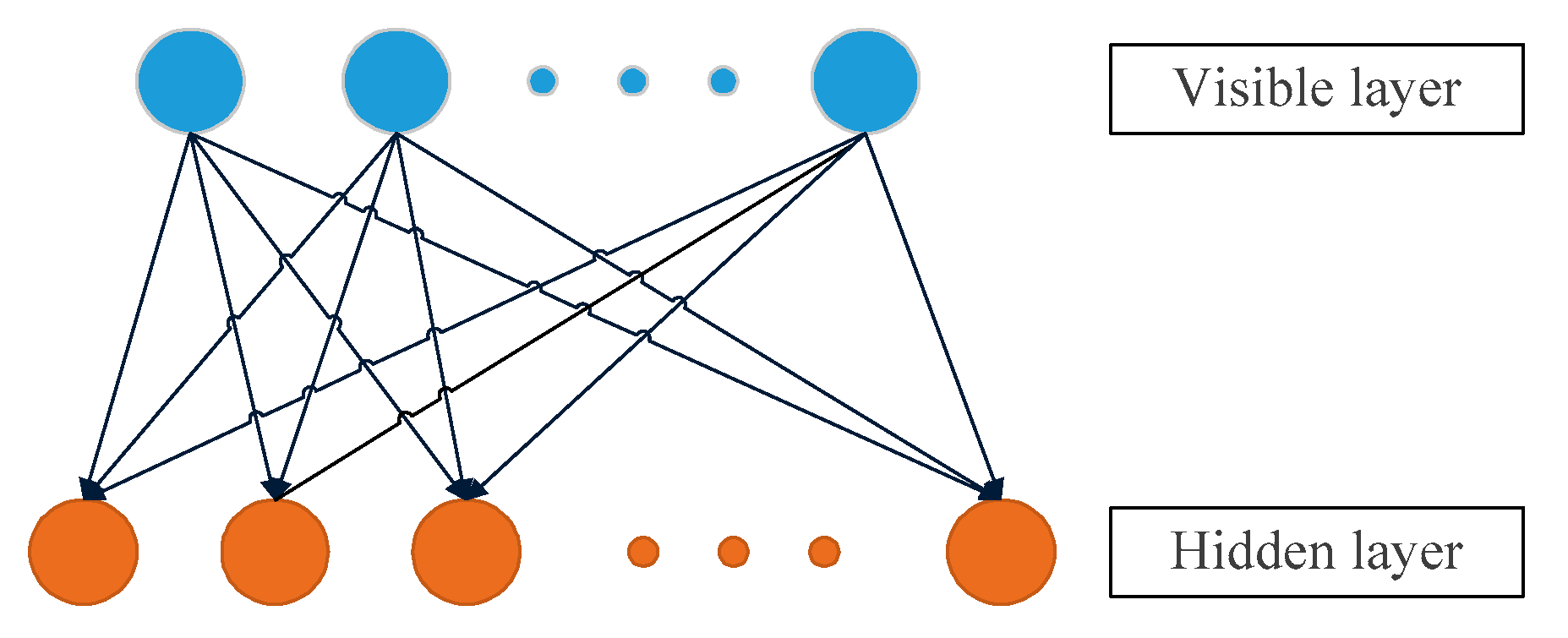
3.2.2. Principle of the Restricted Boltzmann Machine (RBM)
3.2.3. DBN Training Process
3.3. Characterization of Degradation
4. Experimental Validation and Result Analysis
4.1. Satellite Background and Data
4.2. Experimental Results and Analysis
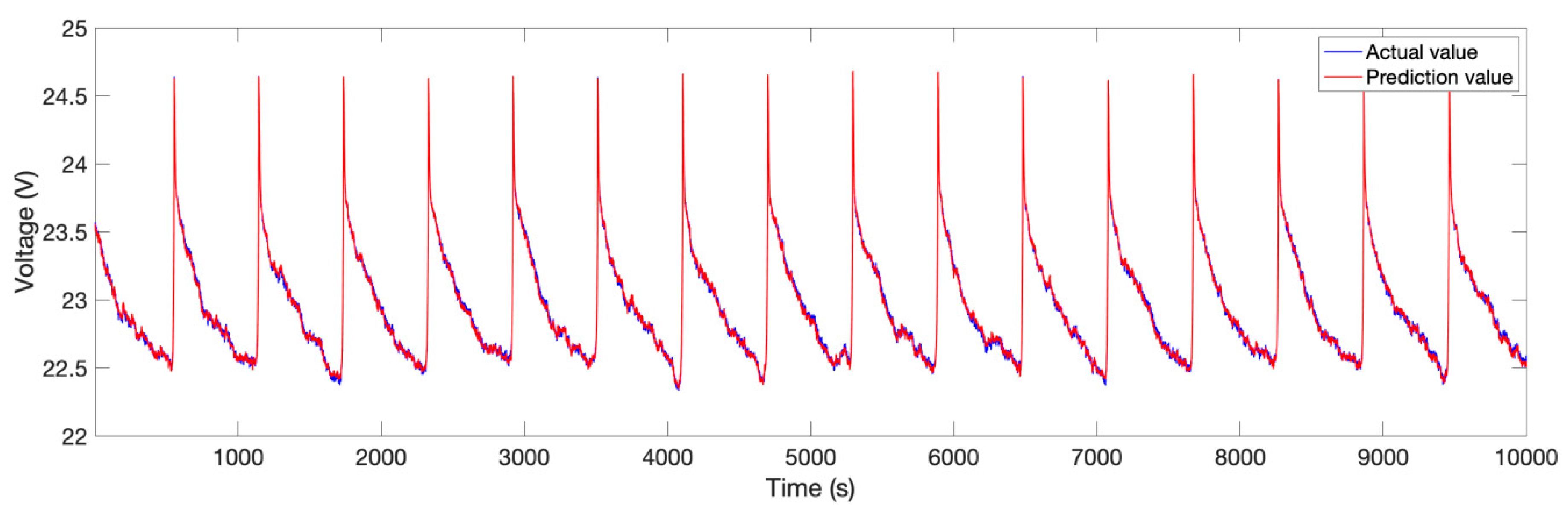
4.2.1. Training effect and Related Comparison of Battery Voltage Anomaly-Detection Model Based on DBN Neural Network Model
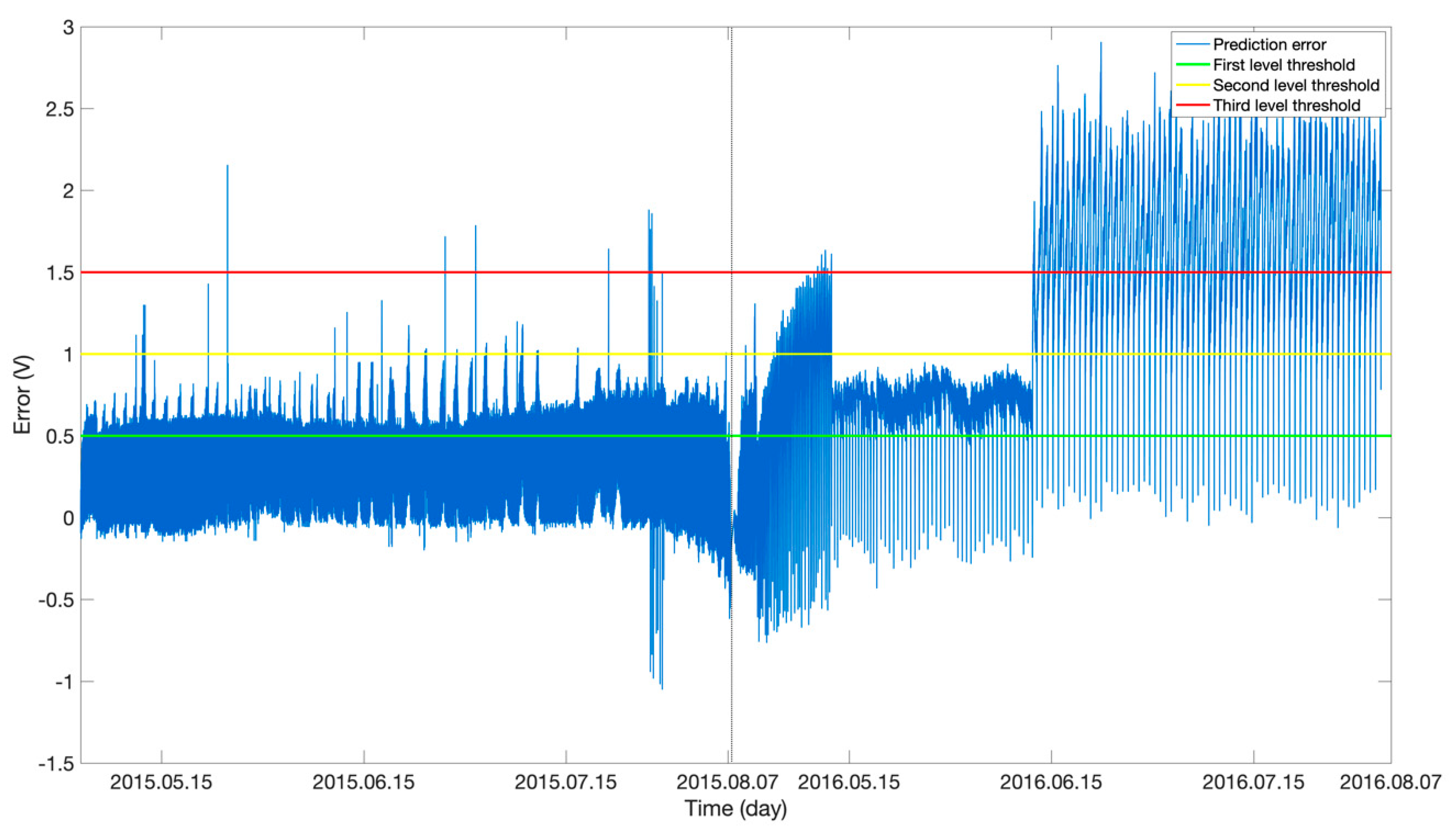
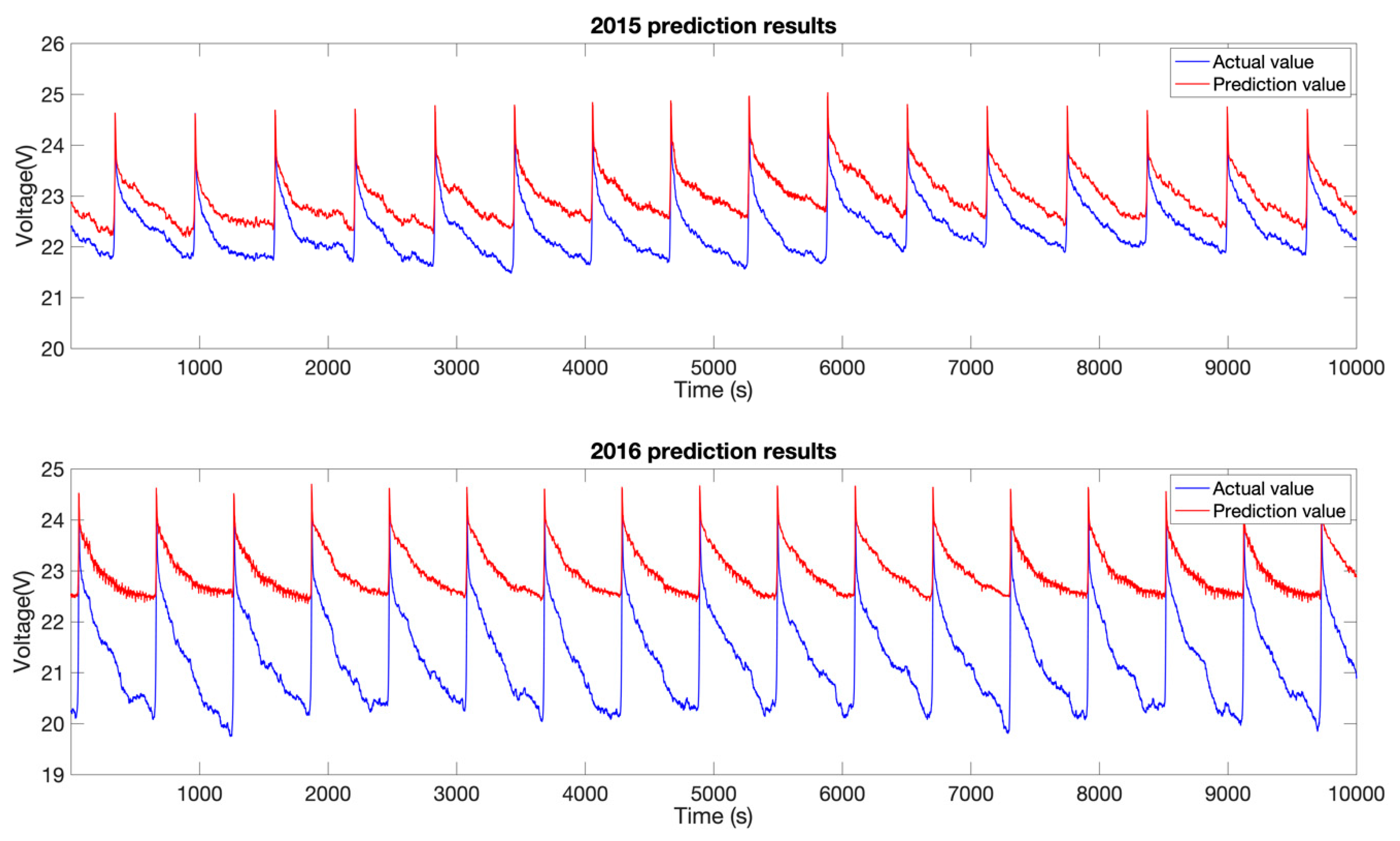
4.2.2. Battery Health Status Online Abnormality-Detection Effect
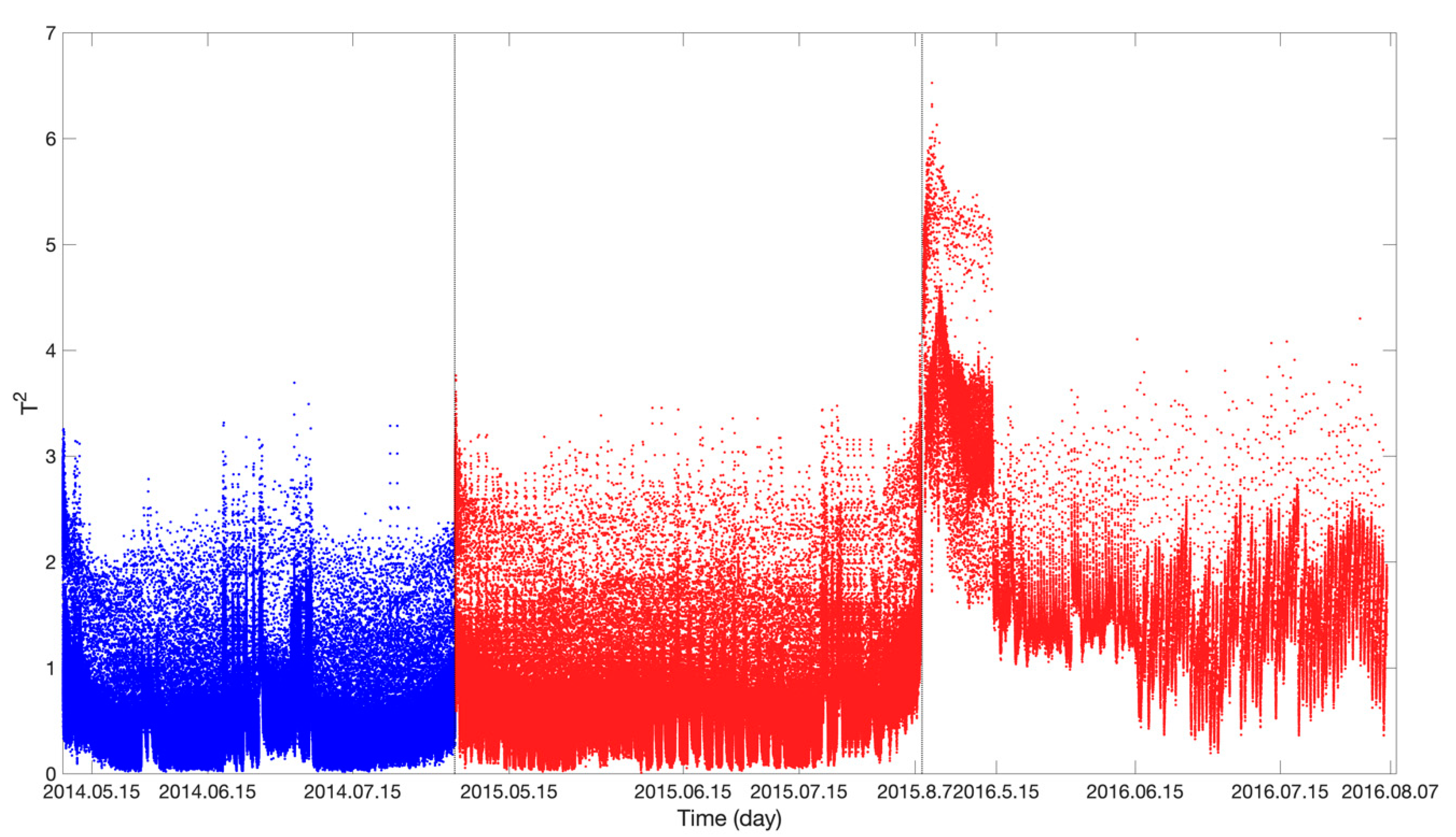
4.2.3. Comparative Verification of Related Multivariate Anomaly-Detection Methods
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, Q.; Liu, Z.; Zhang, X.; Fu, C. Spacecraft Power Technology; Beijing Institute of Technology Press: Beijing, China, 2018. [Google Scholar]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly detection: A survey. ACM Comput. Surv. 2009, 41, 15. [Google Scholar] [CrossRef]
- Chandola, V.; Cheboli, D.; Kumar, V. Detecting Anomalies in a Time Series Database; CS Technical Report 09-004; Computer Science Department, University of Minnesota: Minneapolis, MN, USA, 2009. [Google Scholar]
- Patcha, A.; Park, J.M. An overview of anomaly detection techniques: Existing solutions and latest technological trends. Comput. Netw. 2007, 51, 3448–3470. [Google Scholar] [CrossRef]
- Yairi, T.; Kawahara, Y.; Fujimaki, R.; Sato, Y.; Machida, K. Telemetry-mining: A machine learning approach to anomaly detection and fault diagnosis for space systems. In Proceedings of the IEEE International Conference on Space Mission Challenges for Information Technology, Pasadena, CA, USA, 17–20 July 2006. [Google Scholar]
- García-Teodoro, P.; Díaz-Verdejo, J.; Maciá-Fernández, G.; Vázquez, E. Anomaly-based network intrusion detection: Techniques, systems and challenges. Comput. Secur. 2009, 28, 18–28. [Google Scholar] [CrossRef]
- Holst, A.; Bohlin, M.; Ekman, J.; Sellin, O.; Lindström, B.; Larsen, S. Statistical Anomaly Detection for Train Fleets. In Proceedings of the Twenty-Sixth Aaai Conference on Artificial Intelligence, Toronto, ON, Canada, 22–26 July 2012. [Google Scholar]
- Ding, J.; Liu, Y.; Zhang, L.; Wang, J.; Liu, Y. An anomaly detection approach for multiple monitoring data series based on latent correlation probabilistic model. Appl. Intell. 2016, 44, 340–361. [Google Scholar] [CrossRef]
- Izakian, H.; Pedrycz, W. Anomaly detection in time series data using a fuzzy c- means clustering. In Proceedings of the IFSA World Congress and NAFIPS Annual Meeting (IFSA/NAFIPS), Edmonton, AB, Canada, 24–28 June 2013; pp. 1513–1518. [Google Scholar]
- Mabu, S.; Chen, C.; Lu, N.; Shimada, K.; Hirasawa, K. An Intrusion-Detection Model Based on Fuzzy Class-Association-Rule Mining Using Genetic Network Programming. Appl. Rev. 2011, 41, 130–139. [Google Scholar] [CrossRef]
- Chitrakar, R.; Chuanhe, H. Anomaly Based Intrusion Detection Using Hybrid Learning Approach of Combining k-Medoids Clustering and Naïve Bayes Classification. In Proceedings of the International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2012. [Google Scholar]
- Pang, J.; Liu, D.; Peng, Y.; Peng, X. Optimize the coverage probability of prediction interval for anomaly detection of sensor-based monitoring series. Sensors 2018, 18, 967. [Google Scholar] [CrossRef]
- Pang, J.; Liu, D.; Peng, Y.; Peng, X. Collective Anomalies Detection for Sensing Series of Spacecraft Telemetry with the Fusion of Probability Prediction and Markov Chain Model. Sensors 2019, 19, 722. [Google Scholar] [CrossRef]
- Peng, X.; Pang, J.; Peng, Y.; Liu, D. Review on anomaly detection of spacecraft telemetry data. Chin. J. Sci. Instrum. 2016, 37, 1929–1945. [Google Scholar]
- George, A. Anomaly Detection based on Machine Learning Dimensionality Reduction using PCA and Classification using SVM. Int. J. Comput. Appl. 2012, 47, 5–8. [Google Scholar] [CrossRef]
- Hoffmann, H. Kernel PCA for novelty detection. Pattern Recognit. 2007, 40, 863–874. [Google Scholar] [CrossRef]
- Takeishi, N.; Yairi, T. Anomaly detection from multivariate time-series with sparse representation. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, San Diego, CA, USA, 5–8 October 2014; pp. 2651–2656. [Google Scholar]
- Elad, M. Sparse and Redundant Representations: From Theory to Applications in Signal and Image Processing; Springer: Berlin, Germany, 2010. [Google Scholar]
- Yairi, T.; Inui, M.; Yoshiki, A.; Kawahara, Y.; Takata, N. Spacecraft telemetry data monitoring by dimensionality reduction techniques. In Proceedings of the SICE Annual Conference, Taipei, Taiwan, 18–21 August 2010; pp. 1230–1234. [Google Scholar]
- Cheng, Y.; Jiang, B.; Lu, N.; Wang, T.; Xing, Y. Incremental locally linear embedding-based fault detection for satellite attitude control systems. J. Frankl. Inst. 2016, 353, 17–36. [Google Scholar] [CrossRef]
- Miao, A.; Song, Z.; Ge, Z.; Zhou, L.; Wen, Q. Nonlinear fault detection based on locally linear embedding. J. Control Theory Appl. 2013, 11, 615–622. [Google Scholar] [CrossRef]
- Li, Q.; Zhou, X. Research on anomaly detection method based on KPCA multivariate time series data. Comput. Meas. Control 2011, 19, 822–825. [Google Scholar]
- Ide, T.; Papadimitriou, S.; Vlachos, M. Computing Correlation Anomaly Scores Using Stochastic Nearest Neighbors. In Proceedings of the IEEE International Conference on Data Mining, Omaha, NE, USA, 28–31 October 2007. [Google Scholar]
- Qiu, H.; Liu, Y.; Subrahmanya, N.A.; Li, W. Granger Causality for Time-Series Anomaly Detection. In Proceedings of the IEEE 12th International Conference on Data Mining, Brussels, Belgium, 10–13 December 2012. [Google Scholar]
- Cheng, H.; Tan, P.; Potter, C.; Klooster, S.A. A Robust Graph-Based Algorithm for Detection and Characterization of Anomalies in Noisy Multivariate Time Series. In Proceedings of the IEEE International Conference on Data Mining Workshops, Pisa, Italy, 15–19 December 2008. [Google Scholar]
- Zhao, Y.; Liu, P.; Wang, Z.; Zhang, L.; Hong, J. Fault and defect diagnosis of battery for electric vehicles based on big data analysis methods. Appl. Energy 2017, 207, 354–362. [Google Scholar] [CrossRef]
- Mingant, R.; Bernard, J.; Sauvant-Moynot, V. Novel state-of-health diagnostic method for Li-ion battery in service. Appl. Energy 2016, 183, 390–398. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; He, H. Sensor fault detection and isolation for a lithium- ion battery pack in electric vehicles using adaptive extended Kalman filter. Appl. Energy 2017, 185, 2033–2044. [Google Scholar] [CrossRef]
- Piao, C.; Huang, Z.; Ling, S.; Sheng, L. Research on outlier detection algorithm for evaluation of battery system safety. Adv. Mech. Eng. 2014, 6, 830402. [Google Scholar] [CrossRef]
- Nuhic, A.; Terzimehic, T.; Soczka-Guth, T.; Buchholz, M. Health diagnosis and remaining useful life prognostics of lithium-ion batteries using data-driven methods. J. Power Sources 2013, 239, 680–688. [Google Scholar] [CrossRef]
- Chen, Z.; Xiong, R.; Tian, J.; Shang, X.; Lu, J. Model-based fault diagnosis approach on external short circuit of lithium-ion battery used in electric vehicles. Appl. Energy 2016, 184, 365–374. [Google Scholar] [CrossRef]
- Dey, S.; Biron, Z.A.; Tatipamula, S.; Das, N.; Mohon, S.; Ayalew, B.; Pisu, P. Model-based real-time thermal fault diagnosis of Lithium-ion batteries. Control Eng. Pract. 2016, 56, 37–48. [Google Scholar] [CrossRef] [Green Version]
- Sidhu, A.; Izadian, A.; Anwar, S. Adaptive Nonlinear Model-Based Fault Diagnosis of Li-Ion Batteries. IEEE Trans. Ind. Electron. 2015, 62, 1002–1011. [Google Scholar] [CrossRef]
- Yan, W.; Zhang, B.; Wang, X.; Dou, W.; Wang, J. Lebesgue Sampling-Based Diagnosis and Prognosis for Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2016, 63, 1804–1812. [Google Scholar] [CrossRef]
- Lin, C.; Mu, H.; Xiong, R.; Shen, W. A novel multi-model probability battery state of charge estimation approach for electric vehicles using H-infinity algorithm. Appl. Energy 2016, 166, 76–83. [Google Scholar] [CrossRef]
- Yue, H. BP Neural Network. Inf. Technol. J. 2013, 12, 5401–5405. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G.E. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [Green Version]
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Fischer, A.; Igel, C. An introduction to restricted Boltzmann machines. In Iberoamerican Congress on Pattern Recognition; Springer: Berlin/Heidelberg, Germany, 2012; pp. 14–36. [Google Scholar]
- Hinton, G.E. Training products of experts by minimizing contrastive divergence. Neural Comput. 2002, 14, 1771–1800. [Google Scholar] [CrossRef]
- Moré, J.J. The Levenberg-Marquardt algorithm: Implementation and theory. Lect. Notes Math. 1978, 630, 105–116. [Google Scholar]
- Min, L.; Ningyun, L.; Yuehua, C.; Bin, J. Data-based incipient fault detection and prediction for satellite’s attitude control system. In Proceedings of the 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NN Model | Optimization Method | MSE | MAE | Number of Iterations | Time |
|---|---|---|---|---|---|
| BP | GD | 0.0292 | 0.1462 | 5000 (Unconverged) | 9472.45 s |
| BP | LM | 0.0013 | 0.0153 | 5000 (Unconverged) | 4663.37 s |
| DBN | GD | 0.0022 | 0.0351 | 5000 (Unconverged) | 850.13 s |
| DBN | LM | 7.25 × 10−4 | 0.0105 | 639 | 533.91 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Zhang, T.; Liu, Y. Detection of Voltage Anomalies in Spacecraft Storage Batteries Based on a Deep Belief Network. Sensors 2019, 19, 4702. https://doi.org/10.3390/s19214702
Li X, Zhang T, Liu Y. Detection of Voltage Anomalies in Spacecraft Storage Batteries Based on a Deep Belief Network. Sensors. 2019; 19(21):4702. https://doi.org/10.3390/s19214702
Chicago/Turabian StyleLi, Xunjia, Tao Zhang, and Yajie Liu. 2019. "Detection of Voltage Anomalies in Spacecraft Storage Batteries Based on a Deep Belief Network" Sensors 19, no. 21: 4702. https://doi.org/10.3390/s19214702
APA StyleLi, X., Zhang, T., & Liu, Y. (2019). Detection of Voltage Anomalies in Spacecraft Storage Batteries Based on a Deep Belief Network. Sensors, 19(21), 4702. https://doi.org/10.3390/s19214702