Research on Data Fusion Scheme for Wireless Sensor Networks with Combined Improved LEACH and Compressed Sensing

Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions
- Using the spatial correlation between nodes in WSNs, this paper proposes a clustering data fusion method based on an improved LEACH clustering protocol and sparse hybrid CS. The data fusion process is divided into two parts, clustering and CS.
- In the clustering process, this paper improves the shortcomings (e.g., clustering is not uniform, and it is easy to make a node repeat when the CH energy’s premature consumption is completed as a dead point) of the LEACH algorithm. We consider the influence of residual energy, distance, and compression ratios on the CH node selection and propose a new threshold function.
- In the CS process, we convert the solution of the -norm to the solution of the -norm and transform the non-convex optimization problem into a convex optimization problem. The convex optimization Lagrangian dual function is used to solve the optimization problem and reconstruct the sensor node information. This algorithm has a fast convergence speed and low time complexity. At the same time, it is possible to optimize the network topology and balance the energy consumption of each node in the network.
- The performance analysis and comparison of the experimental results and related methods show that the proposed algorithm can reduce the sampling information of the nodes and better reconstruct the node source, thereby making the network more adaptable and robust.
1.3. Organization
2. System Model
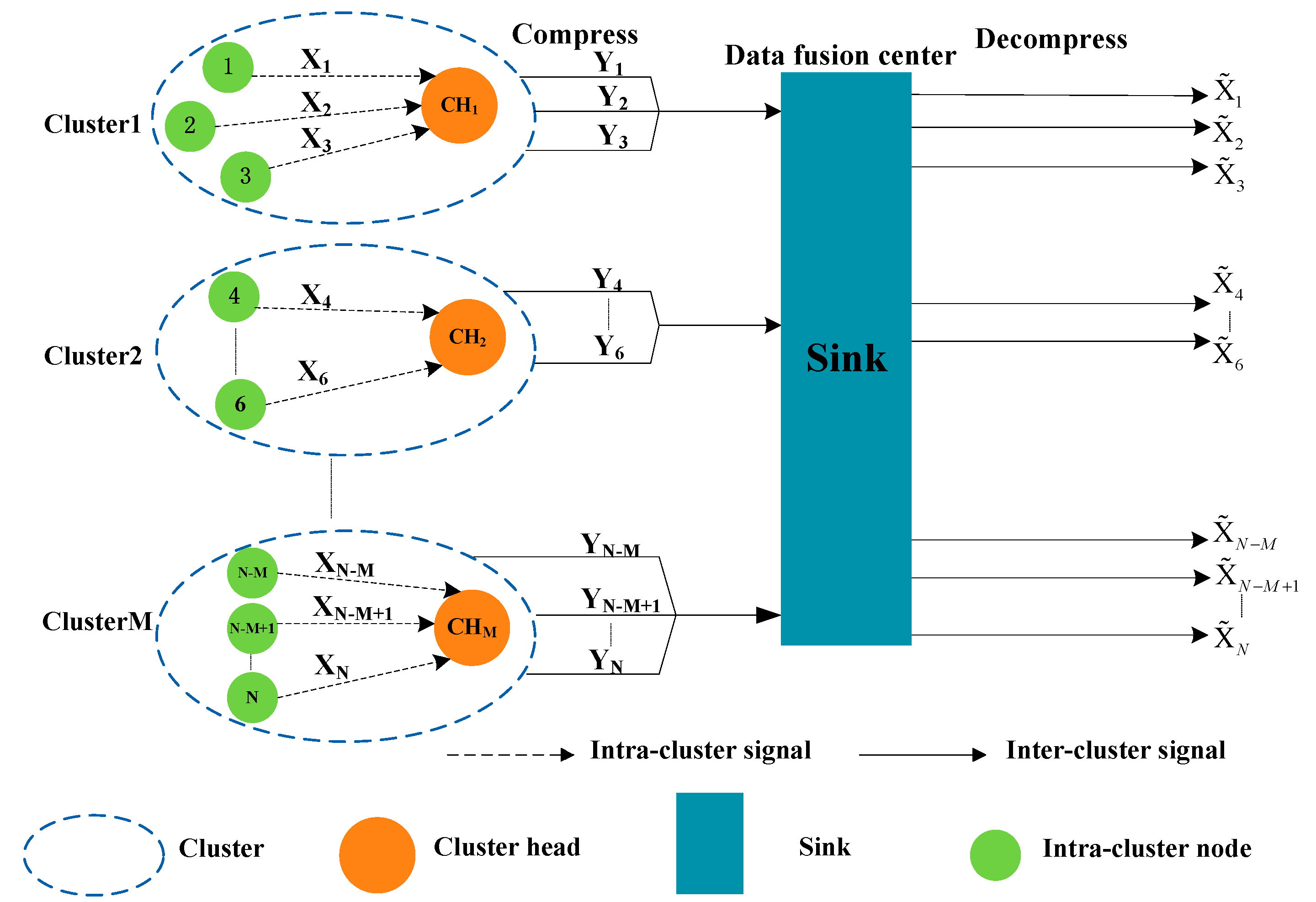
2.1. Network Model
2.2. Energy Consumption Model
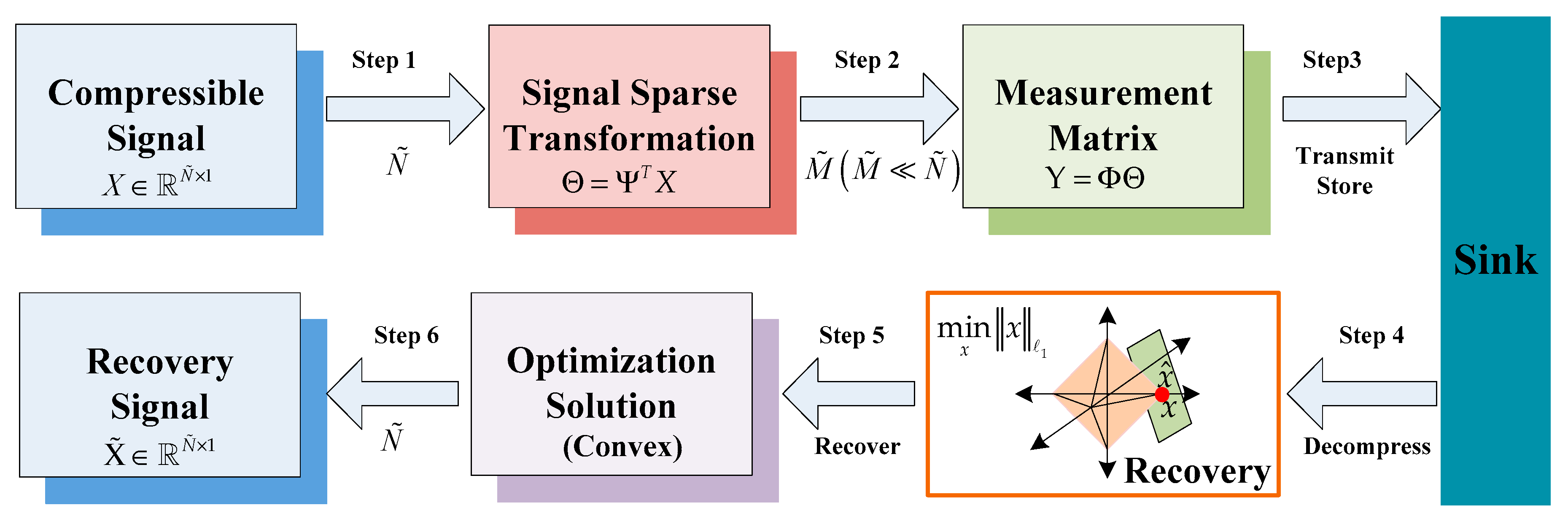
2.3. CS Data Fusion Model
2.3.1. Signal Sparse Transformation
2.3.2. Measurement Matrix Design
2.3.3. Signal Reconstruction
3. Algorithm Design and Implementation
3.1. Improved LEACH Cluster Algorithm
- In the LEACH algorithm, each round of loops must reconstruct the cluster, and the energy cost of constructing the cluster is relatively large.
- Since the LEACH algorithm assumes that all nodes can communicate directly with the sink node, this protocol is not suitable for use in large-scale WSNs.
- The LEACH algorithm does not consider the current energy status of the CH node. If the node with lower energy is selected as the CH node, it might accelerate the death of the node and affect the lifetime of the entire network.
- The LEACH algorithm does not consider the distance between the CH node and the sink node. When the CH node is far away from the sink node, it still uses single-hop communication, which causes the node to consume significant energy and even exhausted energy.
- The number and distribution of the CH nodes were not considered. Therefore, there might be an unbalanced distribution of the selected CH nodes. In some places, there were many CH nodes, and some places did not have any CH nodes.
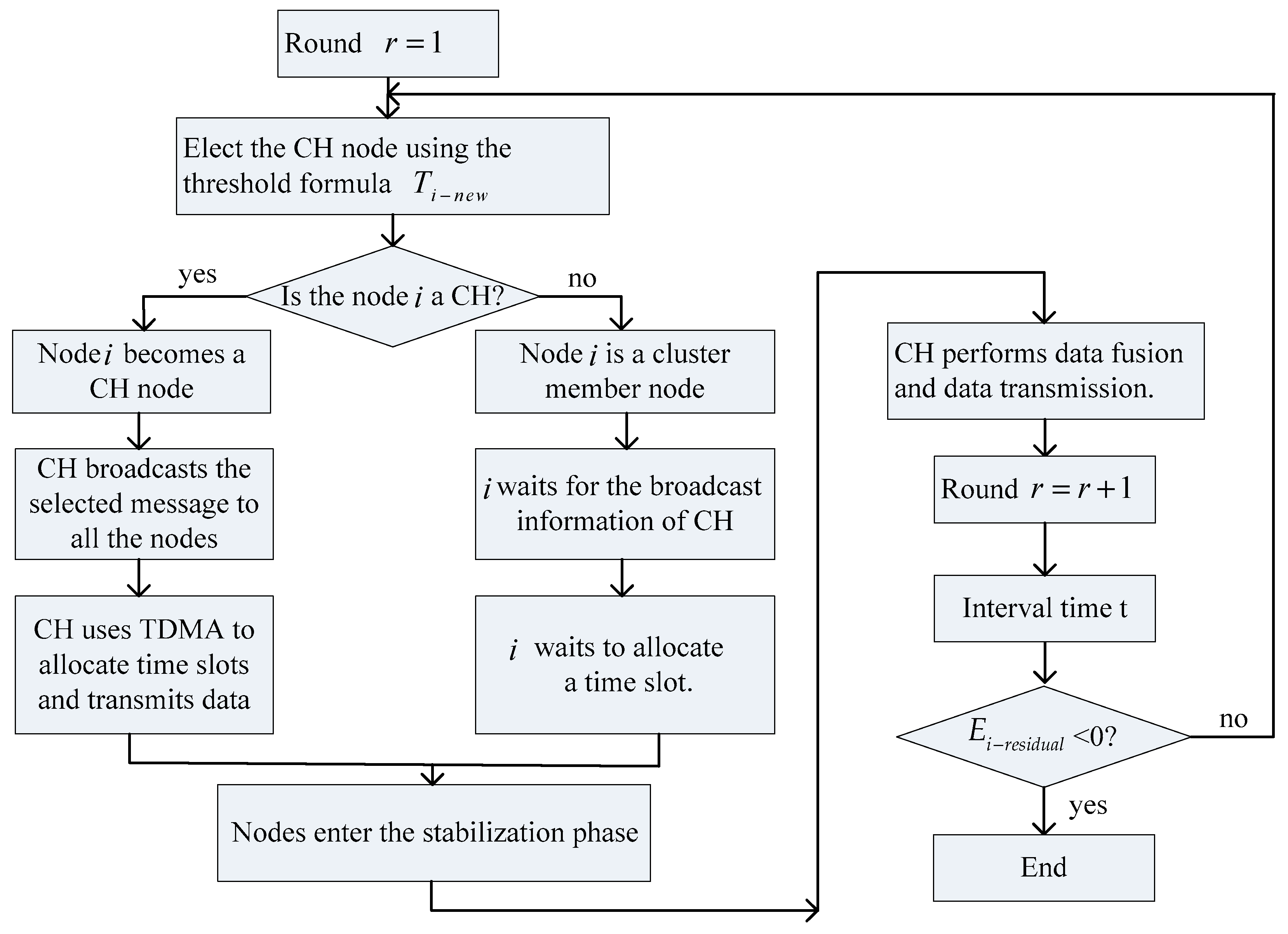
3.1.1. Setup Phase
3.1.2. Stabilization Phase
3.2. Clustering Data Fusion Algorithm Based on Compressive Sensing
3.2.1. Selection of the Sparse Transform Basis
3.2.2. Measurement Matrix Optimization
3.2.3. Reconstruction Algorithm
3.2.4. Algorithm Process
3.3. Algorithm Analysis
3.3.1. Algorithm Convergence Analysis
| Algorithm 1 ICL-LEACH Algorithm for CH Node Election |
| 1:Require:, , , , , , , , , , , , , , , , , , , 2:Ensure: 3:While and do 4: If 5: For to do 6: If 7: and 8: CHnodebroadcasts the selected message to all the nodes 9: CH node uses TDMA to allocate time slots and transmits data 10: Else and 11: CM node waits for the broadcast information of CH node 12: CM node waits to allocate a time slot 13: End if 14: nodes enter the stabilization phase 15: End for 16: Else CH node performs data fusion and data transmission 17: End if 18: 19:Endwhile |
| Algorithm2 CH Node Data Compressed Algorithm |
| 1: Require:, , , , , , , , , , 2: Ensure: 3: While do 4: For to do 5: For to do 4: 6: End for 7: 8: End for 9: CH node sends to the sink node 10: Endwhile |
| Algorithm 3 Sink Node Reconstruction Signal |
| 1: Require:, , , , , , , , , , , , 2: Ensure: 3: When the sink node received from the CH node then 4: Reconstruct the signal using the CVX tool to solve the -norm minimum 5: Cvx_begin 6: variable 7: minimize (norm (,1)) 8: subject to 9: 10: Cvx_end 11: IF then 12: change the CH nodes based on the new source 13: Else go to the Algorithm 1 14: End if 15: End |
3.3.2. Algorithm Time Complexity Analysis
4. System Simulation Analysis
4.1. Experimental Setup
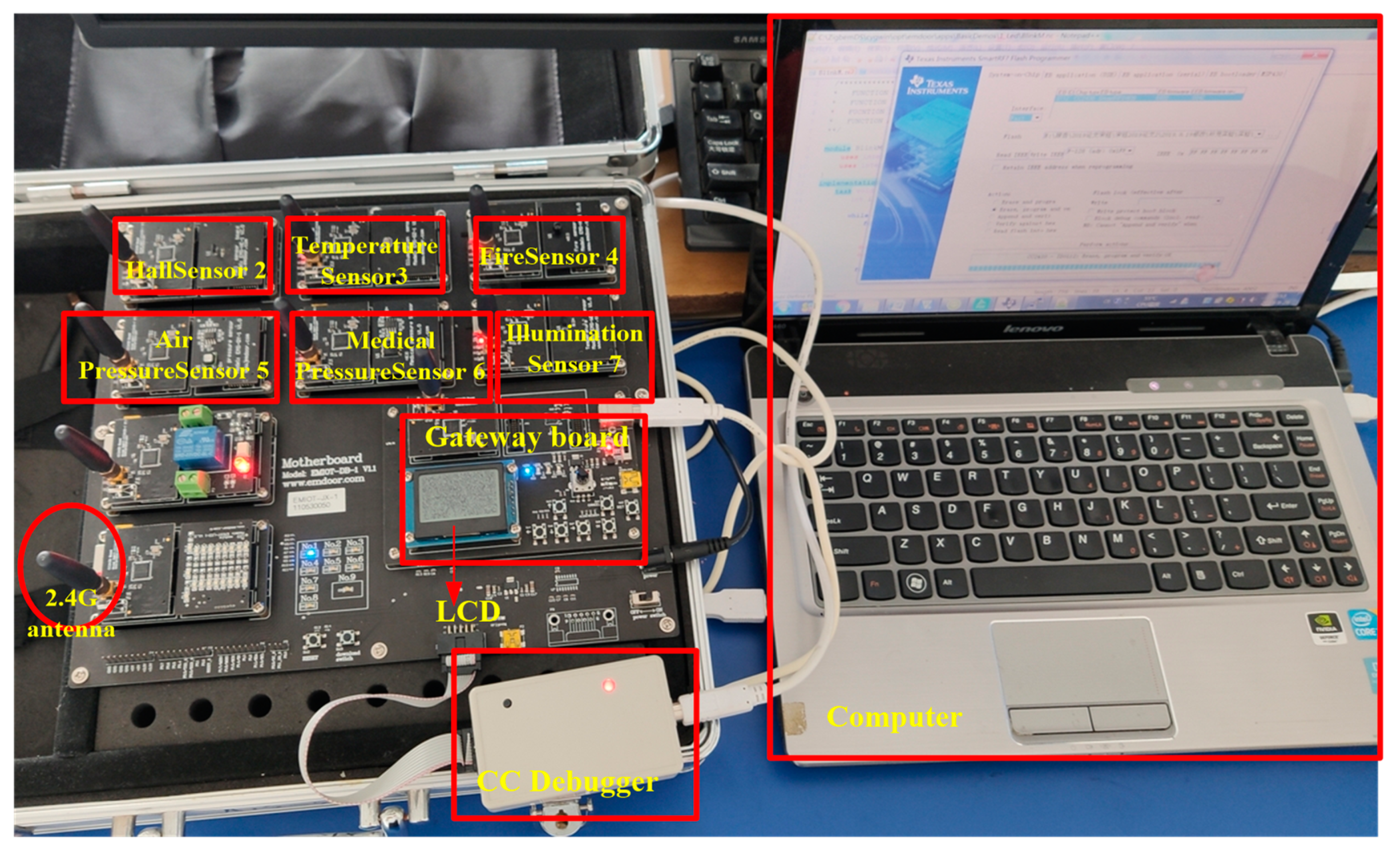
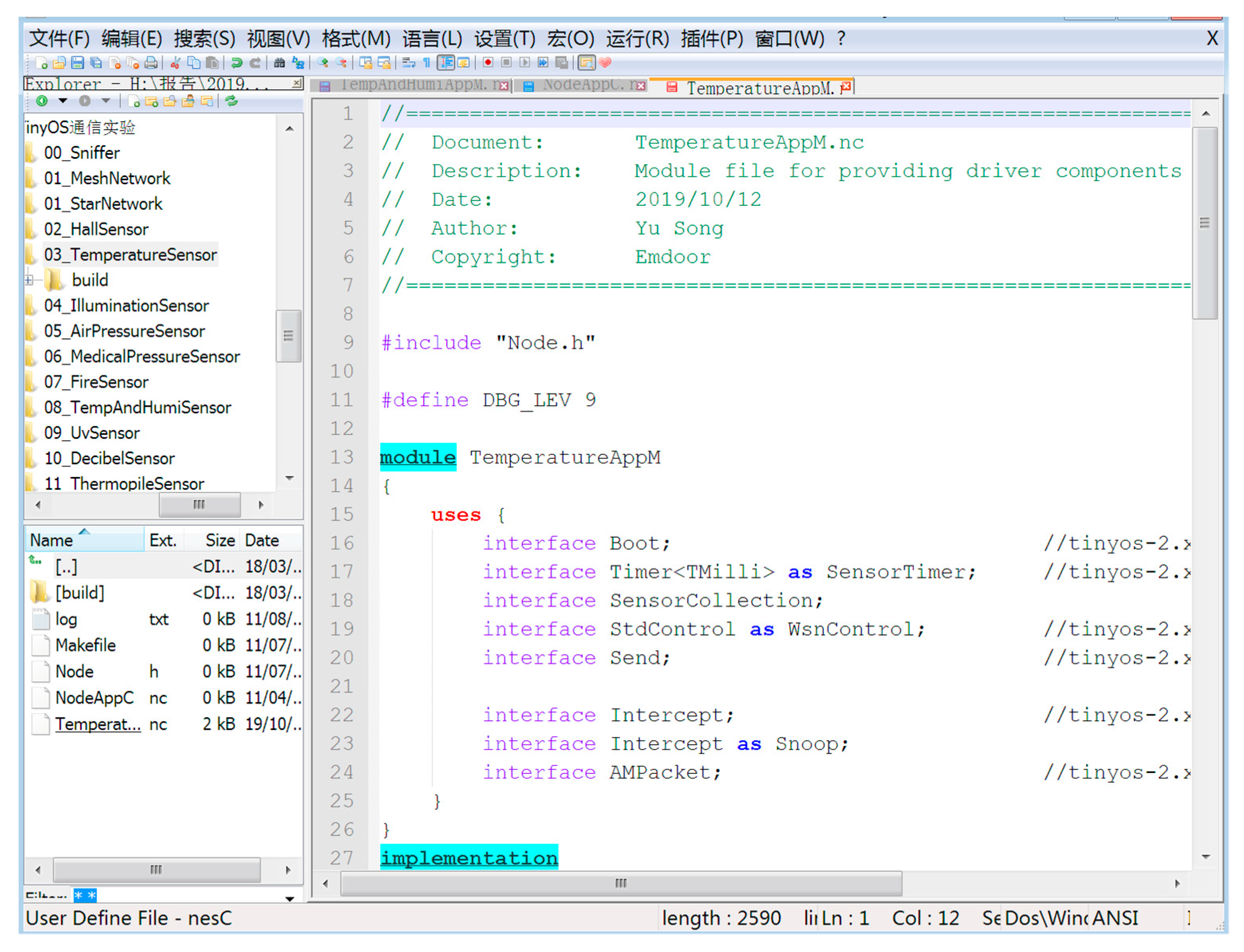
4.1.1. Experimental Environment
- Install the CC-Debug emulator driver;
- Install the CP210X_vcp_win_xp driver for COM 3;
- Install the CC-Debug emulator driver;
- Install the CP210X_vcp_win_xp driver, the simulation is serial port 3;
- Install Setup_SmartRFProgr;
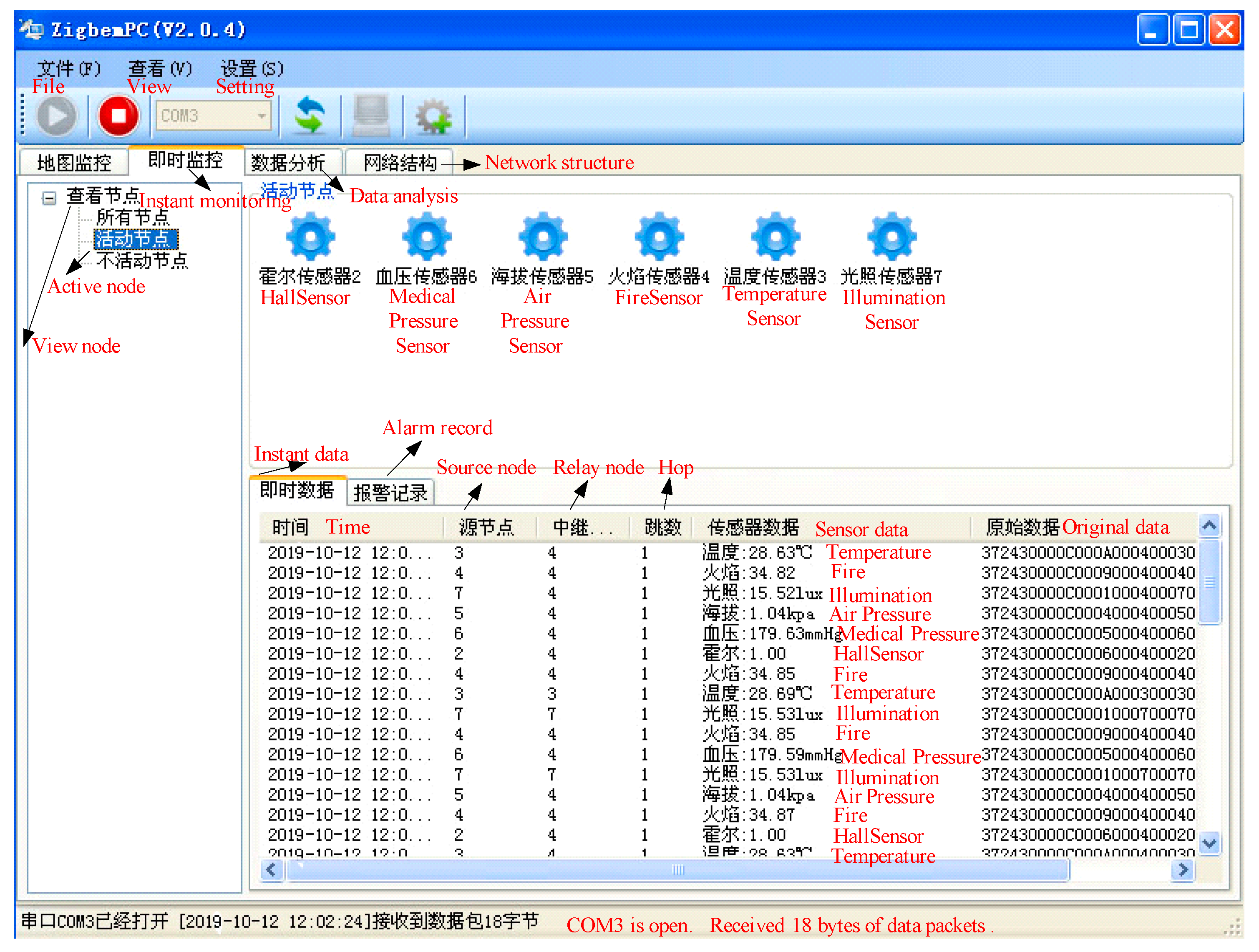
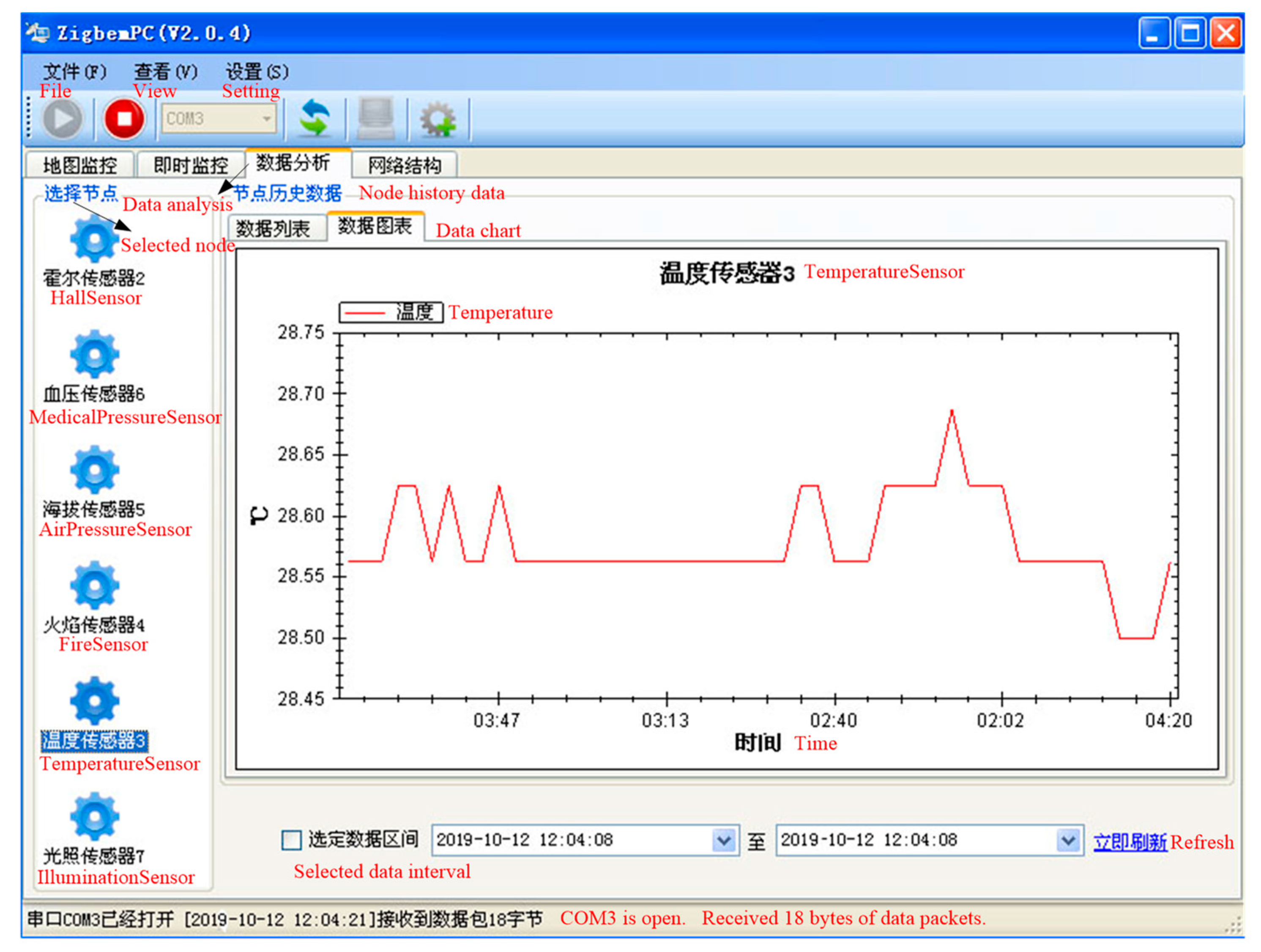
- Install monitoring software ZigbemPC;
- Install the TinyOS development environment program ZigbemDS.
4.1.2. Experimental Process
4.2. Performance Evaluation
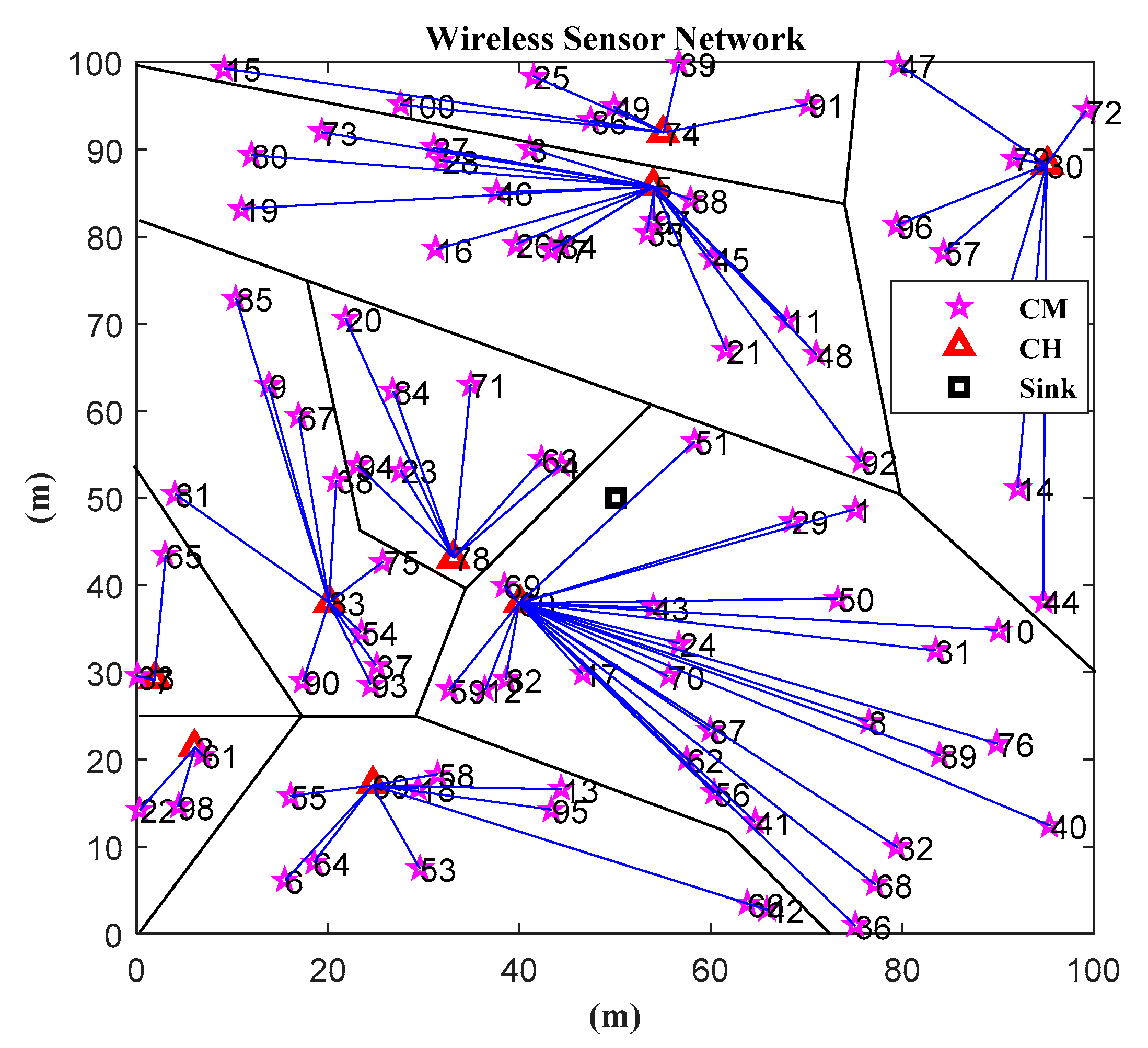
4.2.1. ICEL-LEACH-CS Algorithm Clustering Process
- The sensor nodes are randomly distributed in a square area of 100 (m) × 100 (m);
- WSN is a homogeneous network with each sensor node having the same function and a unique number;
- The sensor node energy is limited, and it does not have an energy harvesting function;
- After the sensor node is deployed, its location is fixed;
- The sink node is located in the center of the area, i.e., the coordinates of the sink node are (50, 50), and the location is also fixed;
- The node communicates with the CH node through a single hop, and the CH node communicates with the sink node in a single hop or multi-hop manner.
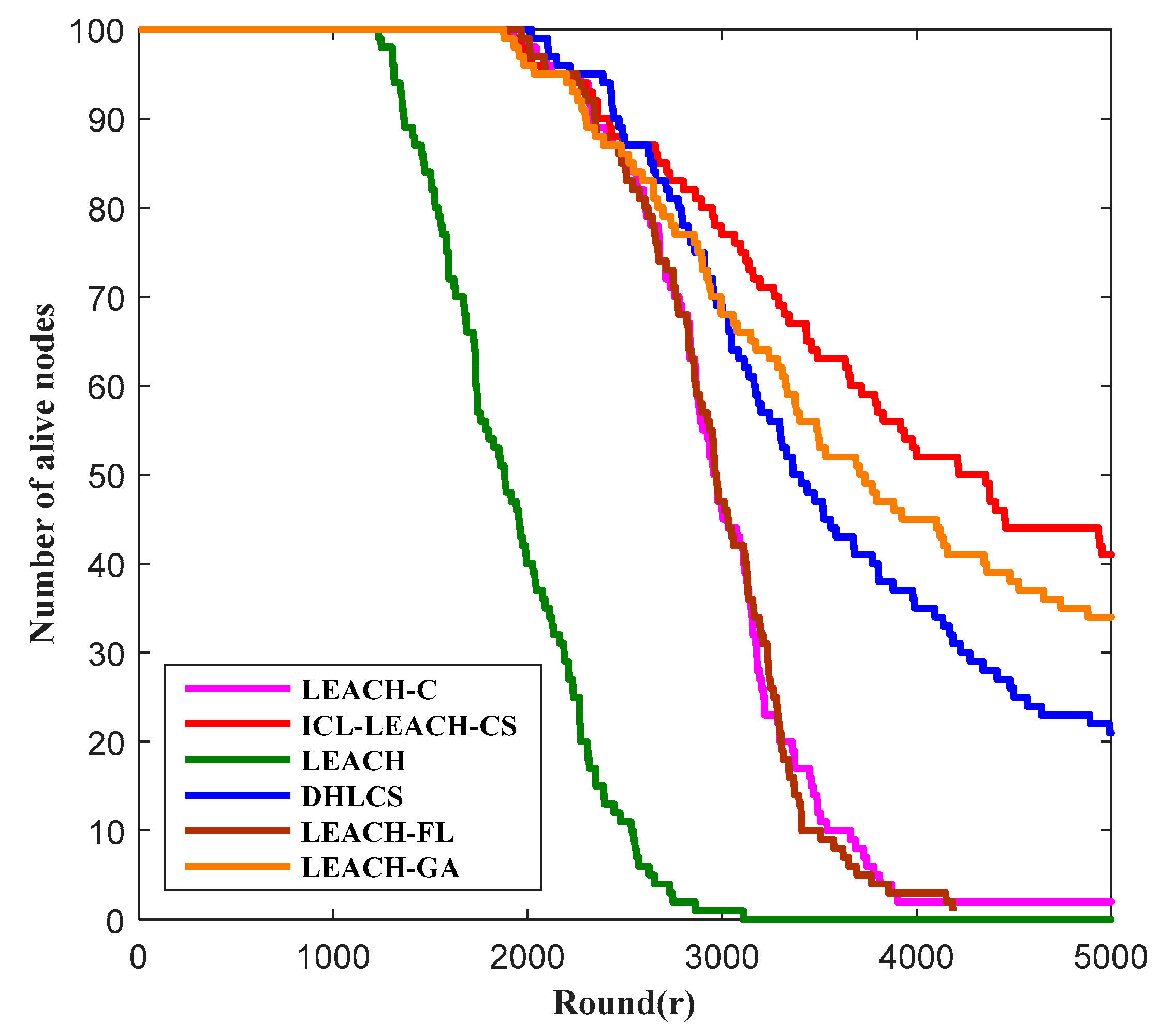
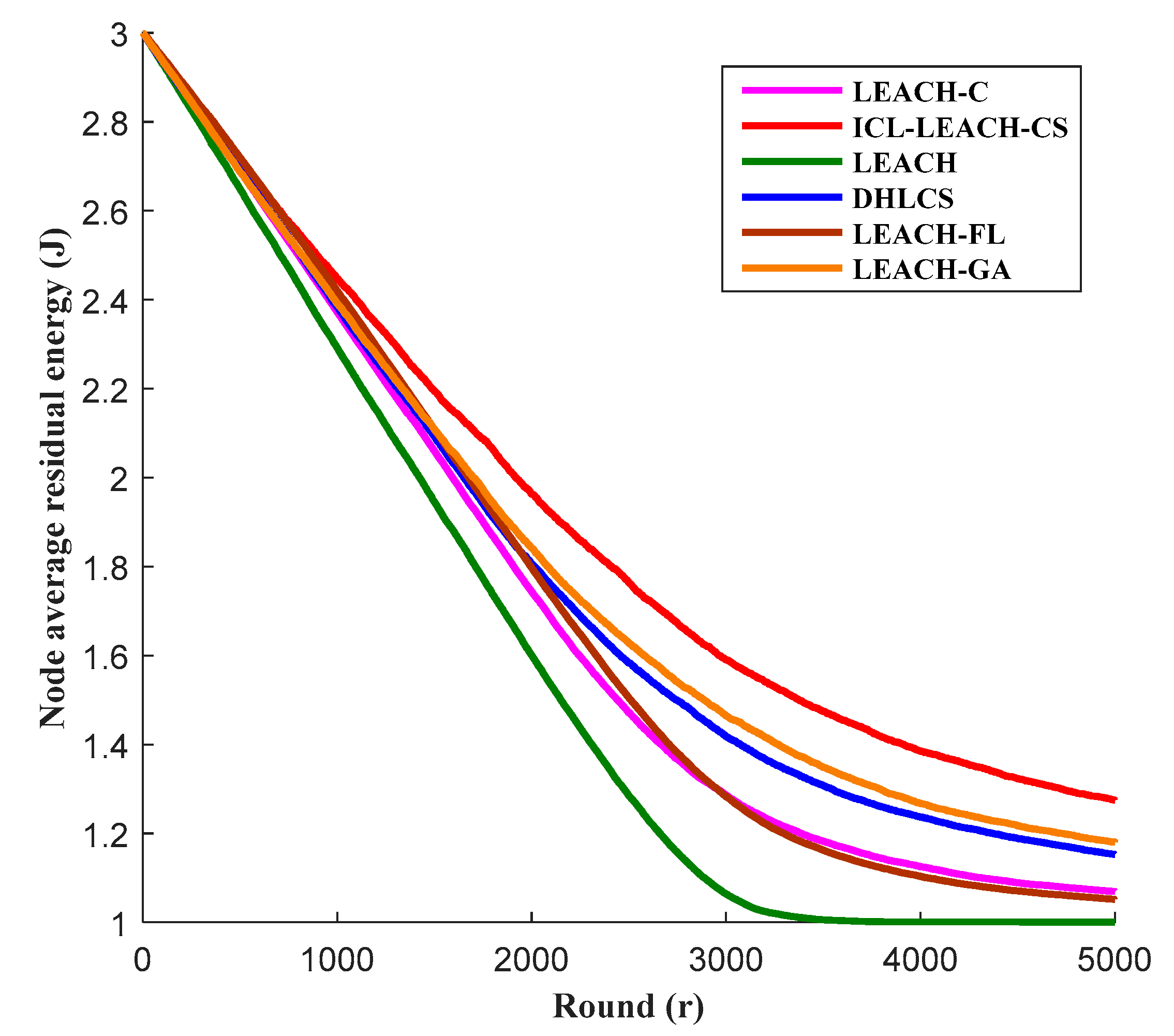
4.2.2. Comparison with Five-Type Cluster Strategy
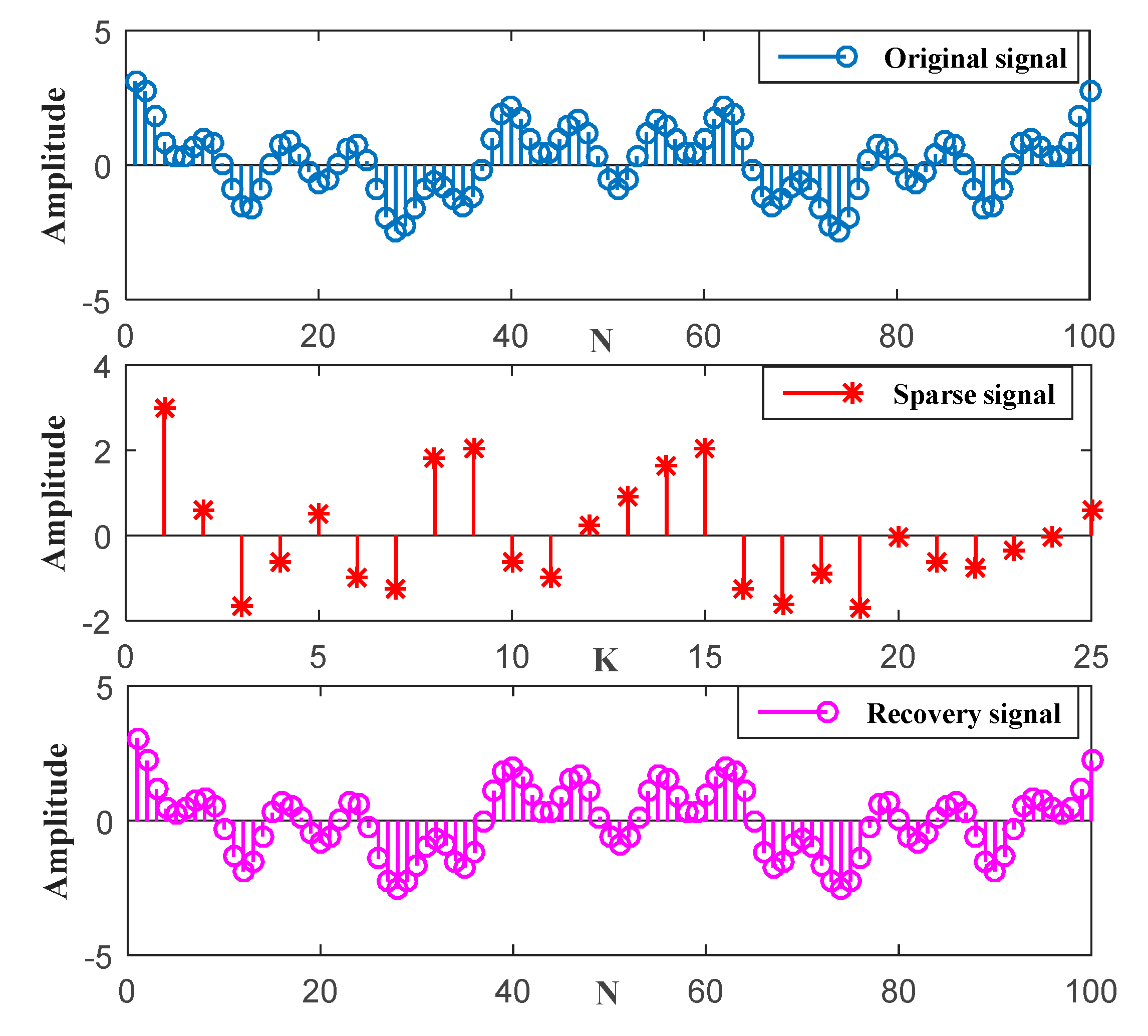
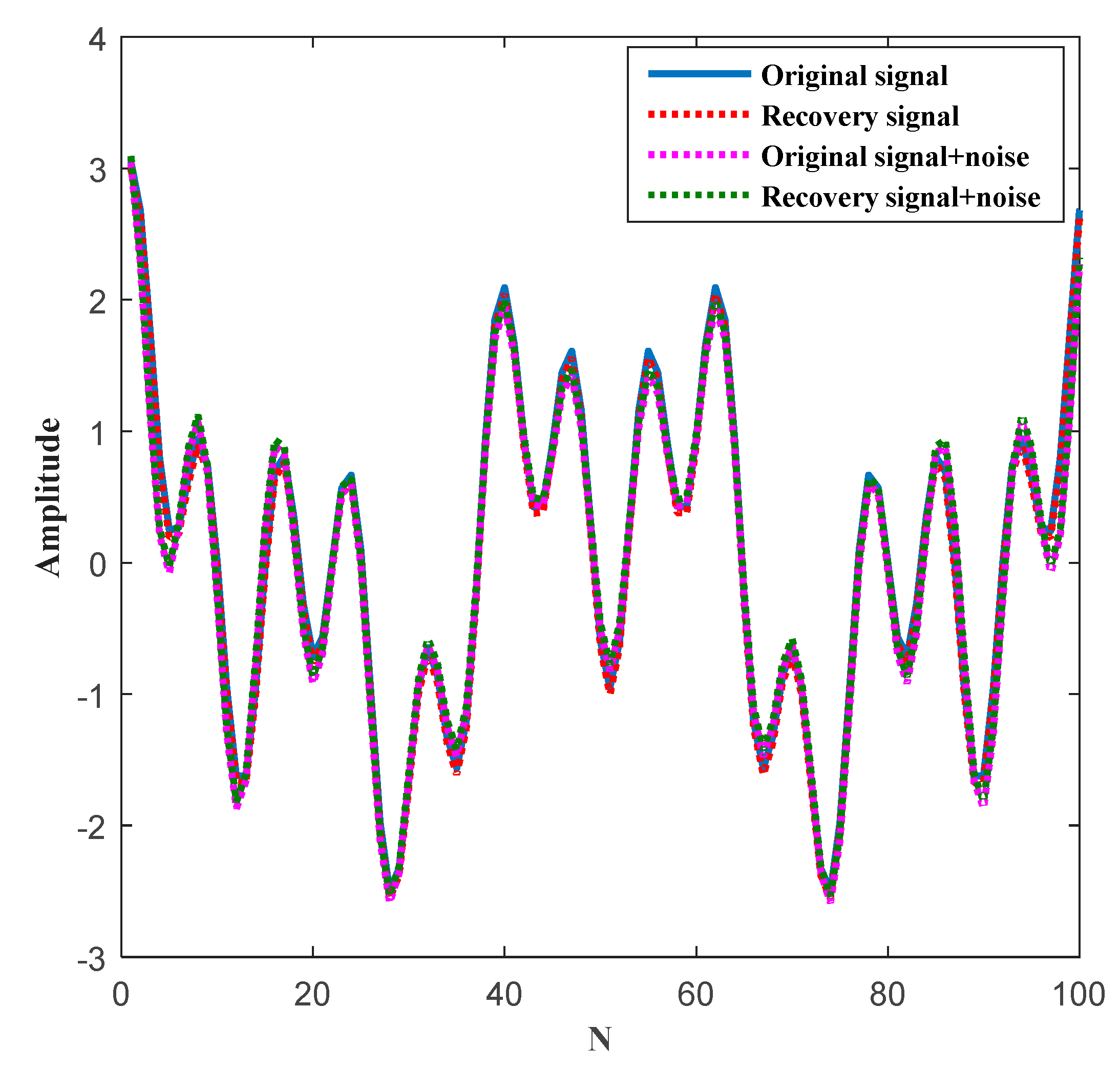
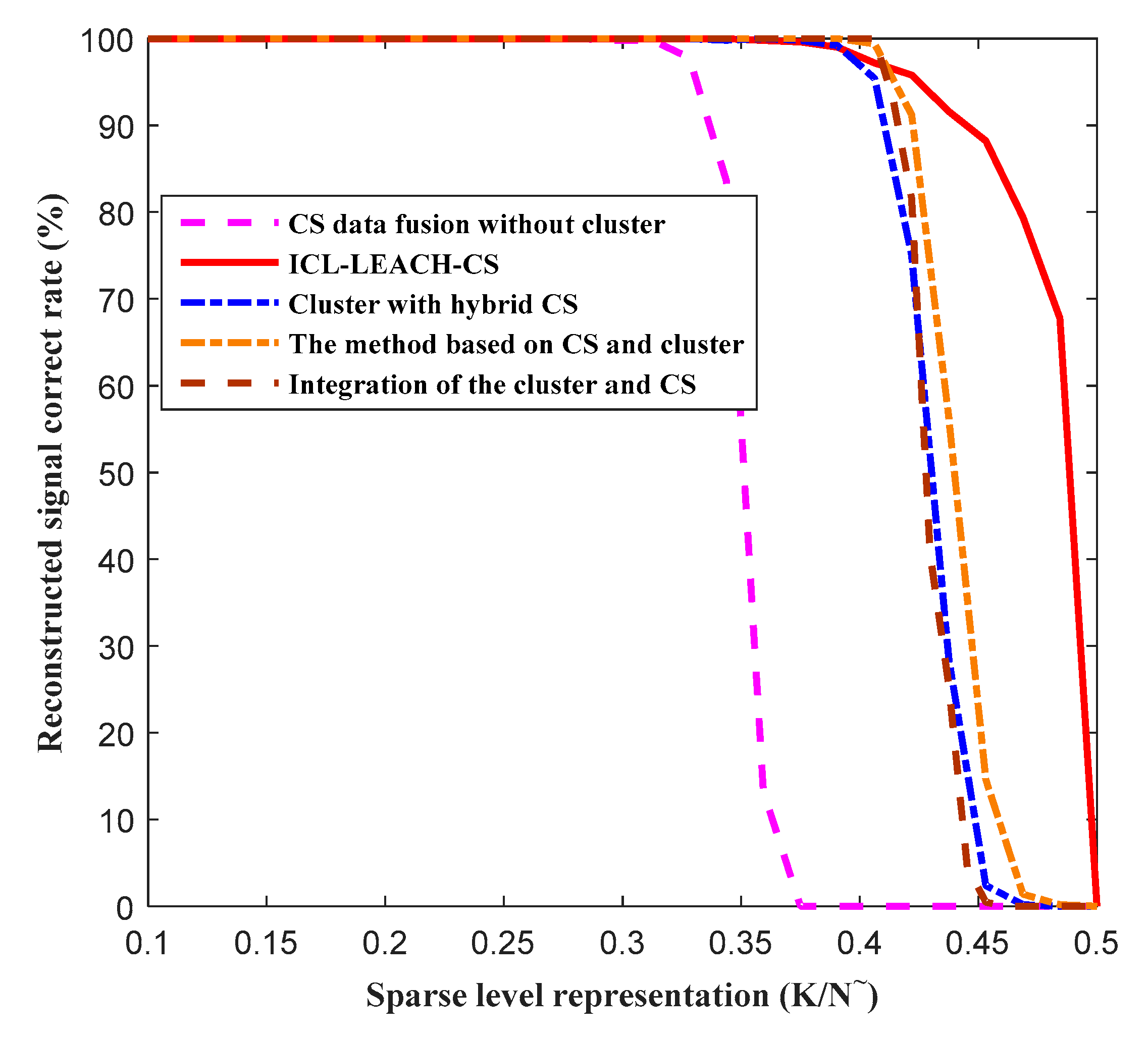
4.2.3. ICEL-LEACH-CS Algorithm Reconstruction Process
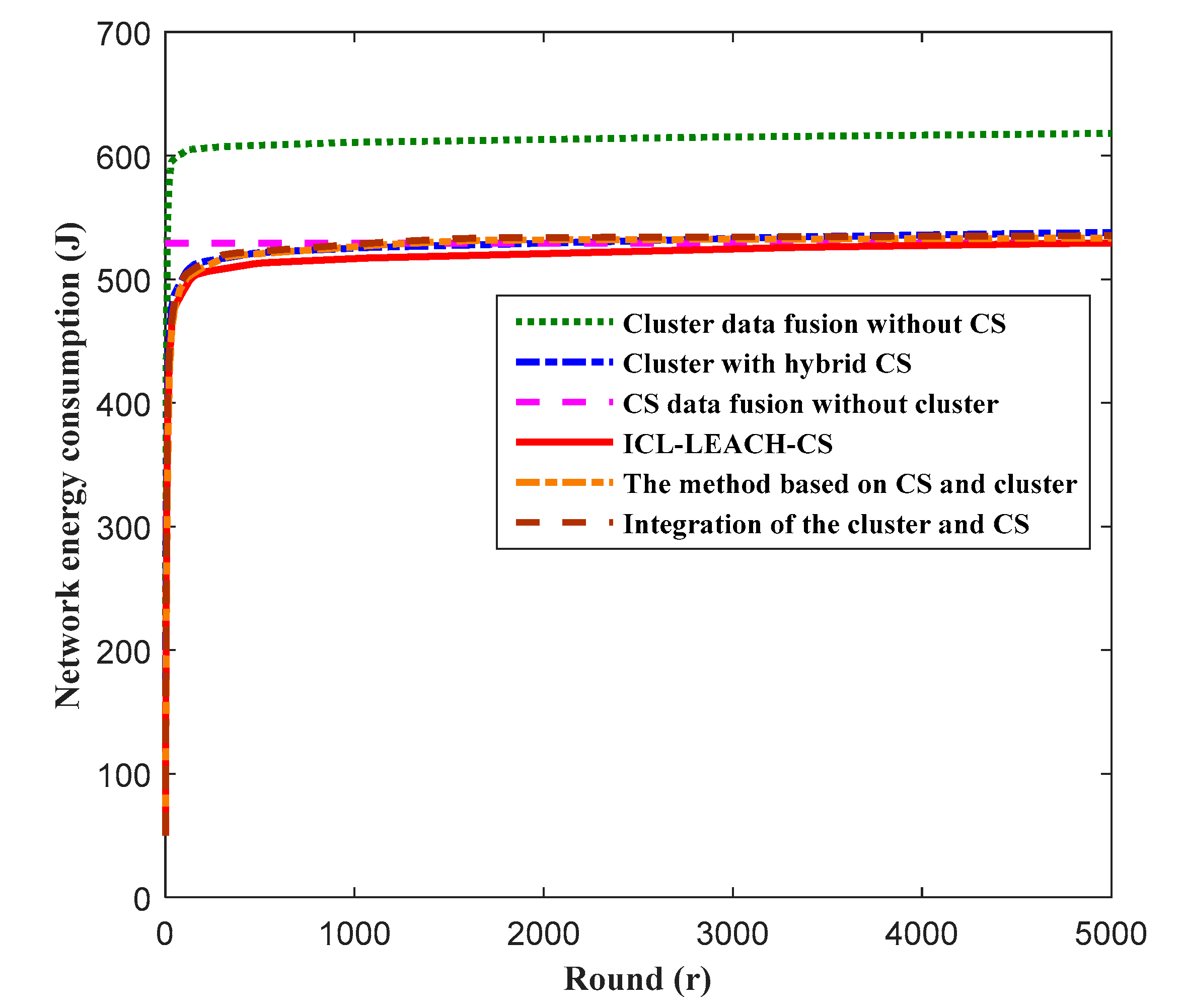
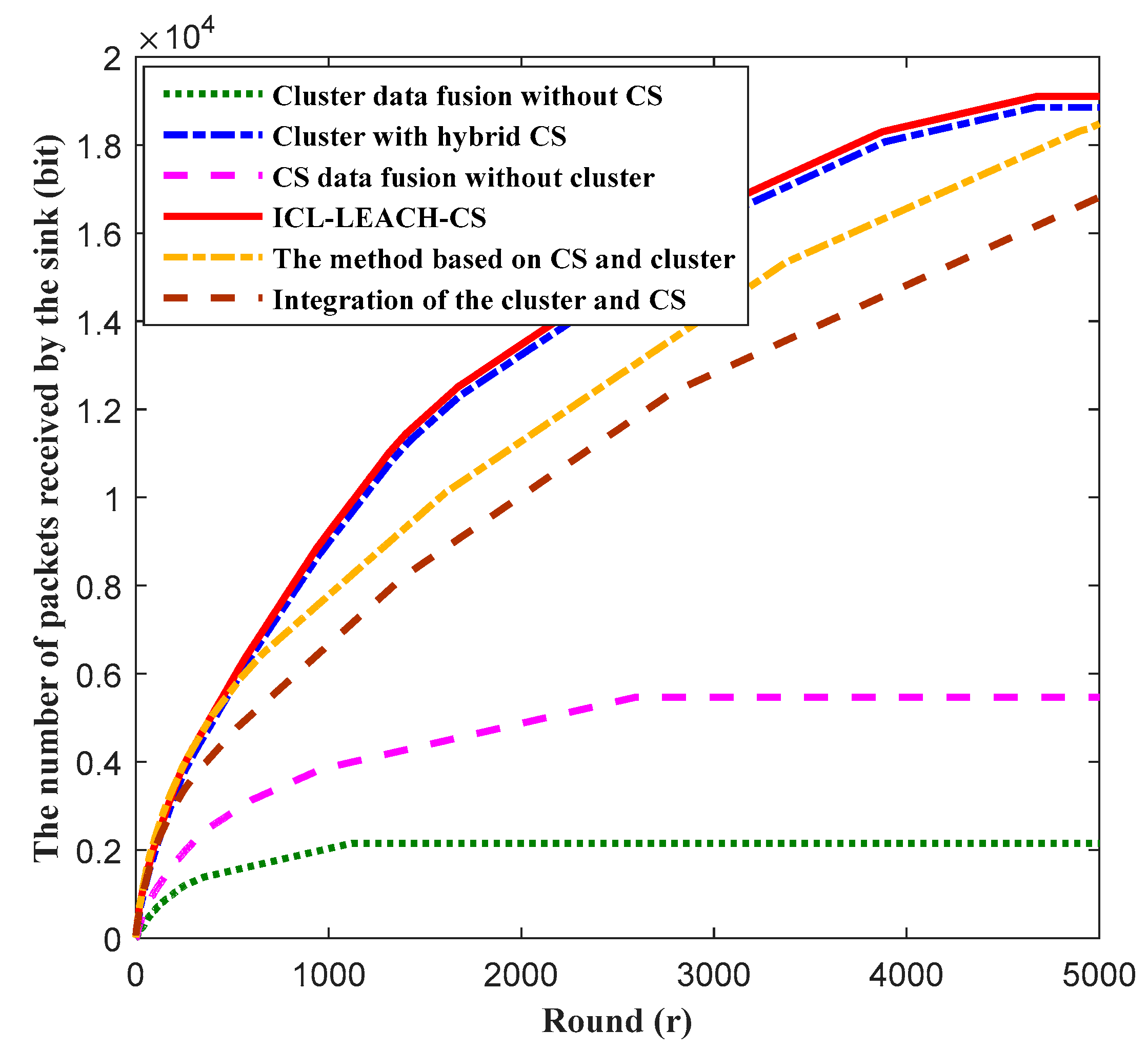
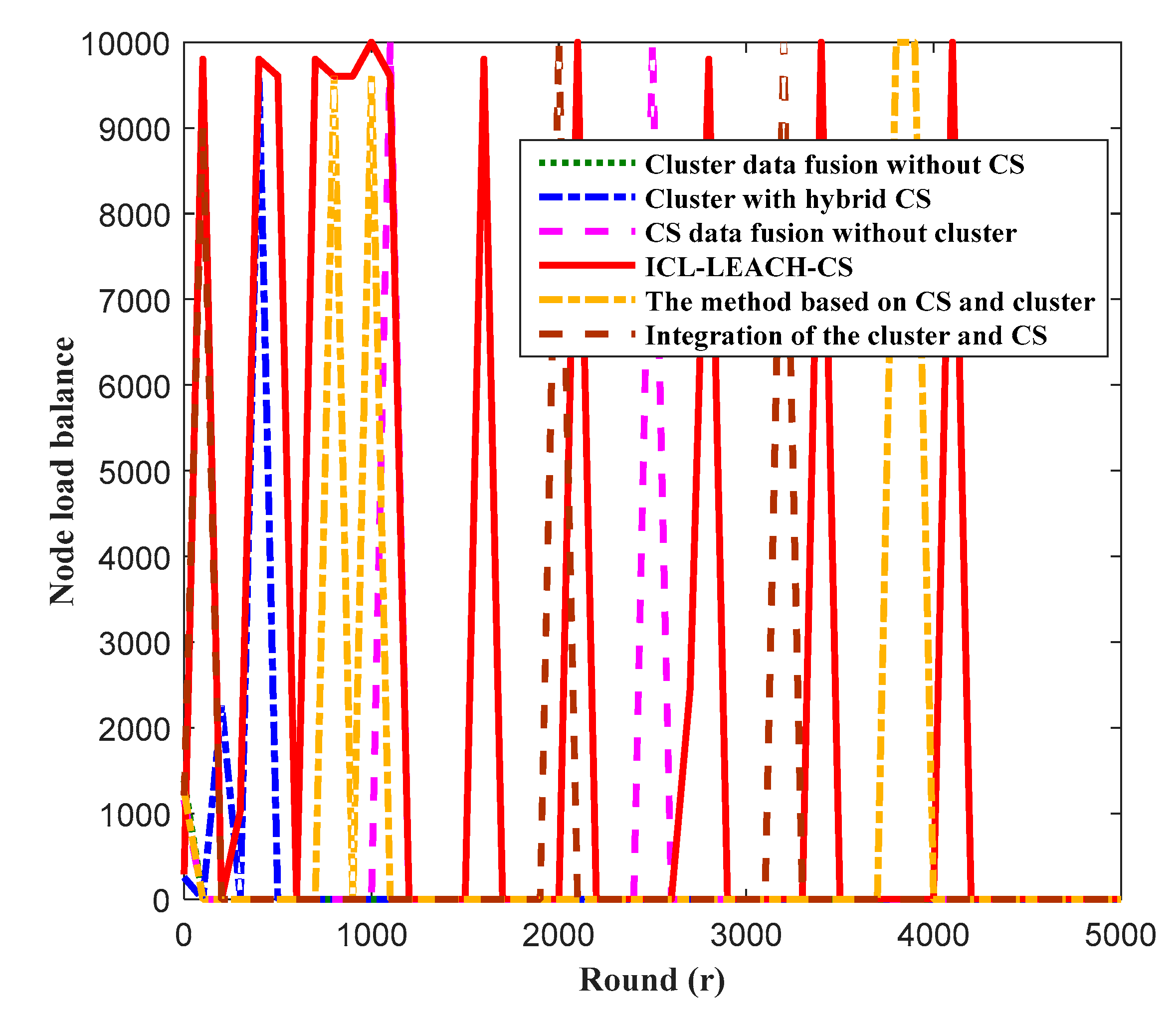
4.2.4. Comparison with Five-Type Data Fusion Strategy
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Maschi, L.; Pinto, A.; Meneguette, R.; Baldassin, A. Data summarization in the node by parameters (DSNP): Local data fusion in an IoT environment. Sensors 2018, 18, 799. [Google Scholar] [CrossRef] [PubMed]
- Izadi, D.; Abawajy, J.H.; Ghanavati, S.; Herawan, T. A data fusion method in wireless sensor networks. Sensors 2015, 15, 2964–2979. [Google Scholar] [CrossRef] [PubMed]
- Kobo, H.I.; Abu-Mahfouz, A.M.; Hancke, G.P. A survey on software-defined wireless sensor networks: Challenges and design requirements. IEEE Access 2017, 5, 1872–1899. [Google Scholar] [CrossRef]
- Cheng, C.T.; Leung, H.; Maupin, P. A delay-aware network structure for wireless sensor networks with in-network data fusion. IEEE Sens. J. 2013, 13, 1622–1630. [Google Scholar] [CrossRef]
- Donoho D, L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Bai, X.; Wang, Z.; Sheng, L.; Wang, Z. Reliable data fusion of hierarchical wireless sensor networks with asynchronous measurement for greenhouse monitoring. IEEE Trans. Control Syst. Technol. 2018, 99, 1–11. [Google Scholar] [CrossRef]
- Luo, H.; Luo, J.; Liu, Y.; Das, S.K. Adaptive data fusion for energy efficient routing in wireless sensor networks. IEEE Trans. Comput. 2006, 55, 1286–1299. [Google Scholar]
- Venkatesh, V.; Raj, P.; Balakrishnan, P. An energy-efficient fuzzy based data fusion and tree based clustering algorithm for wireless sensor networks. In The International Symposium on Intelligent Systems Technologies and Applications; Springer: Cham, Switzerland, 2018; Volume 683, pp. 14–27. [Google Scholar]
- Soltani, M.; Hempel, M.; Sharif, H. Data fusion utilization for optimizing large-scale Wireless Sensor Networks. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, NSW, Australia, 10–14 June 2014. [Google Scholar]
- Li, X.; Liu, W.; Xie, M.; Liu, A.; Zhao, M.; Xiong, N.; Zhao, M.; Dai, W. Differentiated data aggregation routing scheme for energy conserving and delay sensitive wireless sensor networks. Sensors 2018, 18, 2349. [Google Scholar] [CrossRef]
- Xu, J.; Yang, G.; Chen, Z.; Wang, Q. A survey on the privacy-preserving data aggregation in wireless sensor networks. China Commun. 2015, 12, 162–180. [Google Scholar] [CrossRef]
- Yao, Y.; Liu, J.; Xiong, N. Privacy-preserving data aggregation in two-tiered wireless sensor networks with mobile nodes. Sensors 2014, 14, 21174–21194. [Google Scholar] [CrossRef] [PubMed]
- Vinodha, D.; Anita, E.A.M. A survey on privacy preserving data aggregation in wireless sensor networks. In Proceedings of the 2017 International Conference on Information Communication and Embedded Systems (ICICES), Chennai, India, 23–24 February 2017. [Google Scholar]
- Wang, T.; Tan, J.; Ding, W.; Zhang, Y.; Yang, F.; Song, J.; Han, Z. Inter-Community Detection Scheme for Social Internet of Things: A Compressive Sensing Over Graphs Approach. IEEE Internet Things J. 2018, 5, 4550–4557. [Google Scholar] [CrossRef]
- Wang, M.; Yang, S.; Liu, Z.; Li, Z. Collaborative Compressive Radar Imaging with Saliency Priors. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1245–1255. [Google Scholar] [CrossRef]
- Gupta, V.; Kailkhura, B.; Wimalajeewa, T.; Liu, S.; Varshney, P.K. Joint sparsity pattern recovery with 1-bit compressive sensing in distributed sensor networks. IEEE Trans. Signal Inf. Process. Over Netw. 2019, 5, 15–30. [Google Scholar]
- Zayyani, H.; Korki, M.; Marvasti, F. Dictionary Learning for Blind One Bit Compressed Sensing. IEEE Signal Process. Lett. 2015, 23, 187–191. [Google Scholar] [CrossRef] [Green Version]
- Heinzelman, W.R.; Chandrakasan, A. An Application-Specific Protocol Architecture for Wireless Microsensor Networks. IEEE Trans Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Wang, D.; Xu, R.; Hu, X.; Su, W. Energy-Efficient Distributed Compressed Sensing Data Aggregation for Cluster-Based Underwater Acoustic Sensor Networks. Int. J. Distrib. Sens. Netw. 2016, 2016, 1–14. [Google Scholar] [CrossRef]
- Xie, R.; Jia, X. Transmission-Efficient Clustering Method for Wireless Sensor Networks Using Compressive Sensing. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 806–815. [Google Scholar]
- Wang, Q.; Lin, D.; Yang, P.; Zhang, Z. An Energy-Efficient Compressive Sensing-Based Clustering Routing Protocol for WSNs. IEEE Sens. J. 2019, 19, 3950–3960. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.G.; Zhang, T.; Zhang, J.; Dong, Y.; Zhang, X.D. A kind of effective data aggregating method based on compressive sensing for wireless sensor network. EURASIP J. Wirel. Commun. Netw. 2018, 159, 1–15. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Compressive Sensing Based Data Gathering in Clustered Wireless Sensor Networks. In Proceedings of the 2014 IEEE International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina Del Rey, CA, USA, 26–28 May 2014; pp. 187–192. [Google Scholar]
- Ju, Y.; Yan, J.; Xu, H. Performance Optimization Based on Compressive Sensing for Wireless Sensor Networks. Wirel. Pers. Commun. 2017, 95, 1927–1941. [Google Scholar]
- Tian, X. Research on Data Fusion Technology Based on Compressed Sensing. Int. J. Online Eng. (IJOE) 2016, 12, 13–18. [Google Scholar] [CrossRef]
- Handy, M.J.; Haase, M.; Timmermann, D. Low Energy Adaptive Clustering Hierarchy with Deterministic Cluster-Head Selection. In Proceedings of the 4th International Workshop on Mobile and Wireless Communications Network, Stockholm, Sweden, 9–11 September 2002. [Google Scholar]
- Yue, J.; Zhang, W.; Xiao, W.; Tang, D.; Tang, J. A Novel Cluster-Based Data Fusion Algorithm for Wireless Sensor Networks. In Proceedings of the 2011 7th International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 23–25 September 2011. [Google Scholar]
- Li, X.; Tao, X.; Mao, G. Unbalanced Expander based Compressive Data Gathering in Clustered Wireless Sensor Networks. IEEE Access 2017, 5, 7553–7566. [Google Scholar] [CrossRef]
- Wohwe Sambo, D.; Yenke, B.O.; Förster, A.; Dayang, P. Optimized clustering algorithms for large wireless sensor networks: A review. Sensors 2019, 19, 322. [Google Scholar] [CrossRef] [PubMed]
- Ran, G.; Zhang, H.; Shulan, G. Improving on LEACH Protocol of Wireless Sensor using Fuzzy Logic. J. Inf. Comput. Sci. 2010, 3, 767–775. [Google Scholar]
- Liu, J.L.; Ravishankar, C.V. LEACH-GA: Genetic Algorithm-Based Energy-Efficient Adaptive Clustering Protocol for Wireless Sensor Networks. Int. J. Mach. Learn. Comput. 2011, 1, 79–85. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Node number | 6/100 | Noise Nm | 0.1 |
| Transmission range | 50 m | Sparsity | 25 |
| Initial energy | 3 J | Measurement | 50 |
| Data size | 4000 bit | Carrier frequency | 25 kHz |
| 50 nJ/bit | Control packet length N | 100 bit | |
| 100 pJ/(bit·m2) | Sampling frequency | 100 kHz | |
| 10 pJ/(bit·m2) | Setup phase: stabilization phase | 1:15 | |
| Edf | 5 nJ/bit | Maximum round | 5000 |
| CH selection ratio | 0.05 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Liu, Z.; He, X.; Jiang, H. Research on Data Fusion Scheme for Wireless Sensor Networks with Combined Improved LEACH and Compressed Sensing. Sensors 2019, 19, 4704. https://doi.org/10.3390/s19214704
Song Y, Liu Z, He X, Jiang H. Research on Data Fusion Scheme for Wireless Sensor Networks with Combined Improved LEACH and Compressed Sensing. Sensors. 2019; 19(21):4704. https://doi.org/10.3390/s19214704
Chicago/Turabian StyleSong, Yu, Zhigui Liu, Xiaoli He, and Hong Jiang. 2019. "Research on Data Fusion Scheme for Wireless Sensor Networks with Combined Improved LEACH and Compressed Sensing" Sensors 19, no. 21: 4704. https://doi.org/10.3390/s19214704
APA StyleSong, Y., Liu, Z., He, X., & Jiang, H. (2019). Research on Data Fusion Scheme for Wireless Sensor Networks with Combined Improved LEACH and Compressed Sensing. Sensors, 19(21), 4704. https://doi.org/10.3390/s19214704