Development of an AI Model to Measure Traffic Air Pollution from Multisensor and Weather Data

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Methods Used
2.1. Machine Learning Methods
2.1.1. Adaptive Network-Based Fuzzy Inference System
2.1.2. Particle Swarm Optimization
2.1.3. Simulated Annealing
2.2. Model Validation
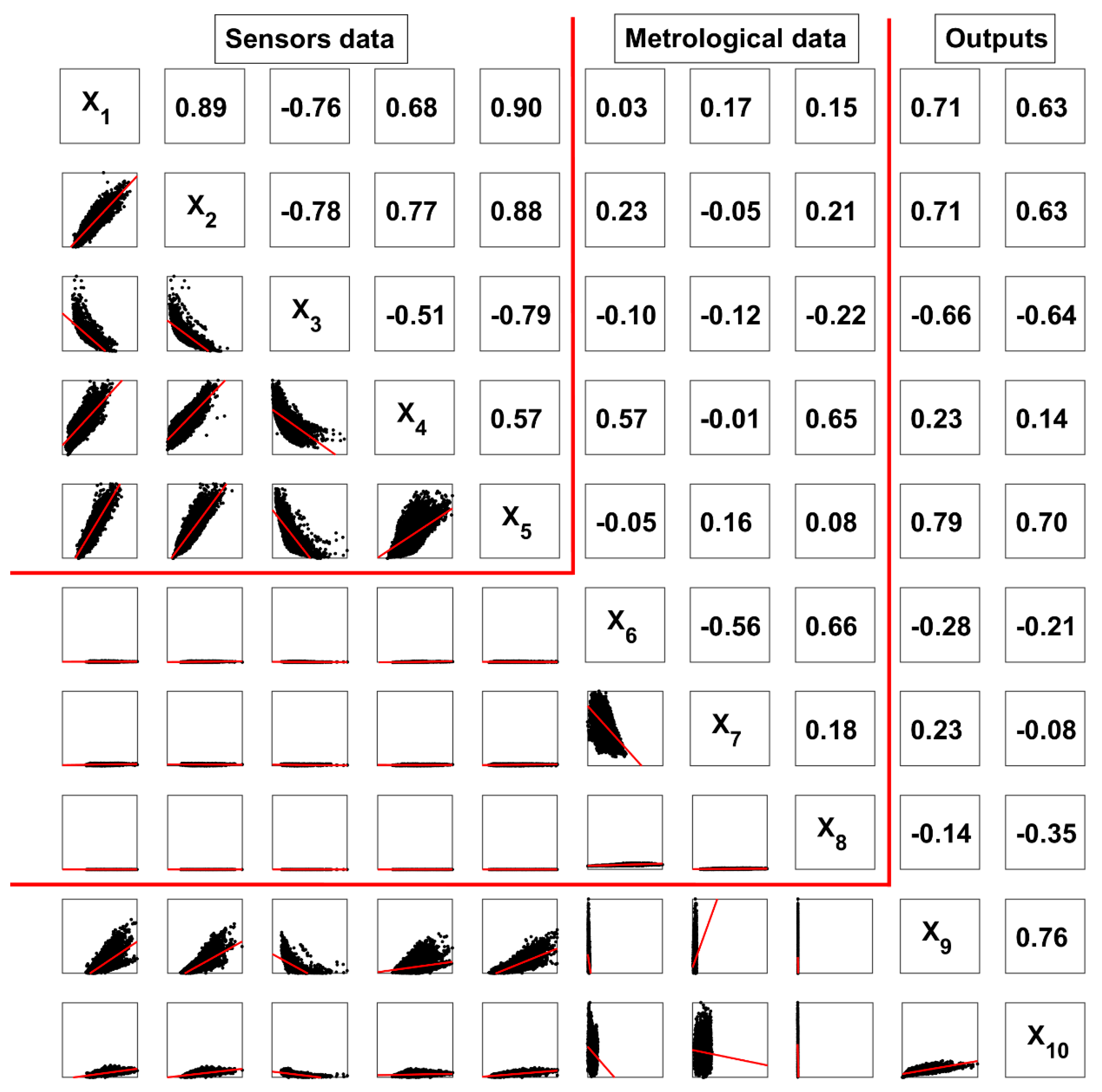
3. Dataset
4. Results and Discussion
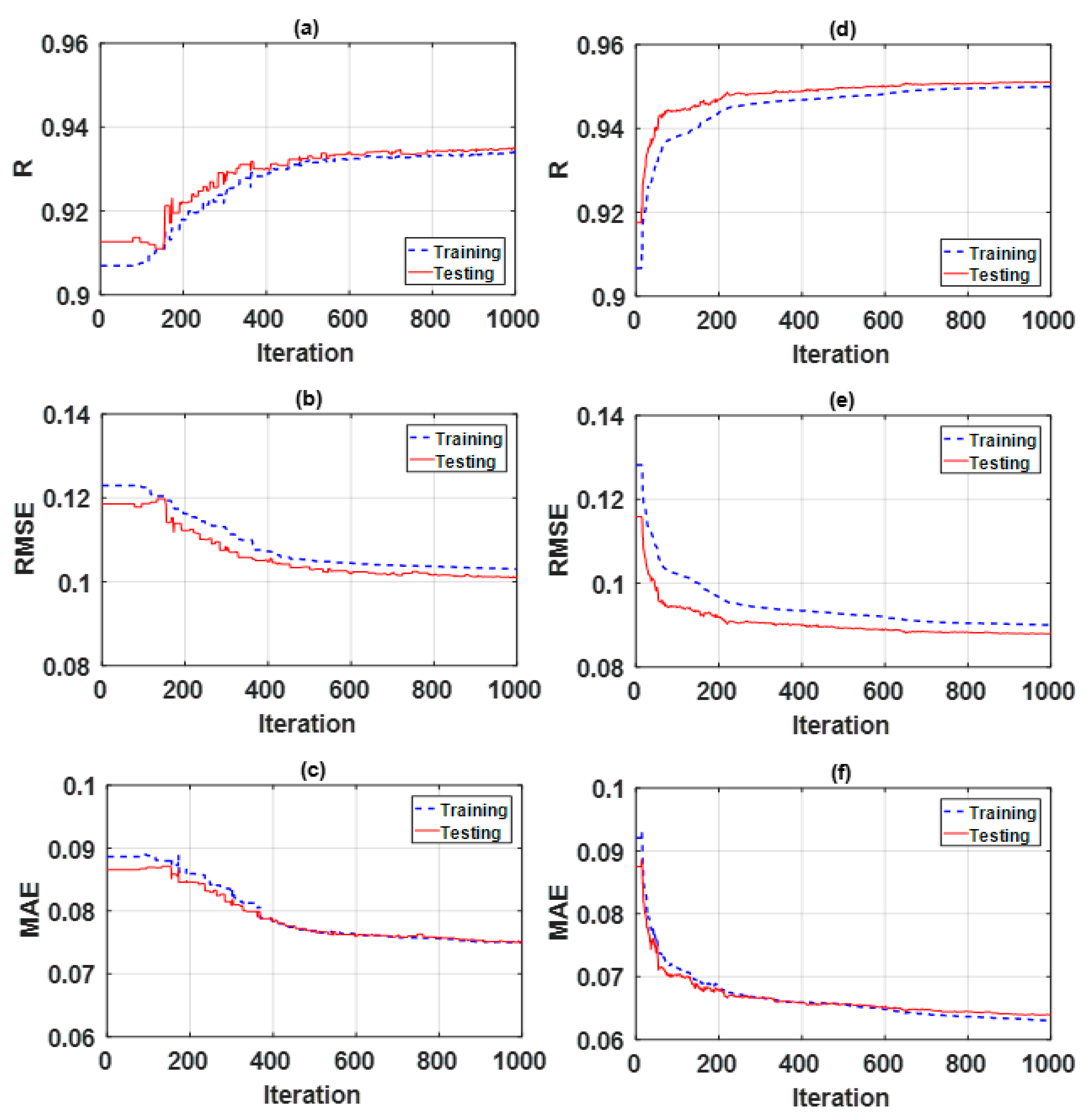
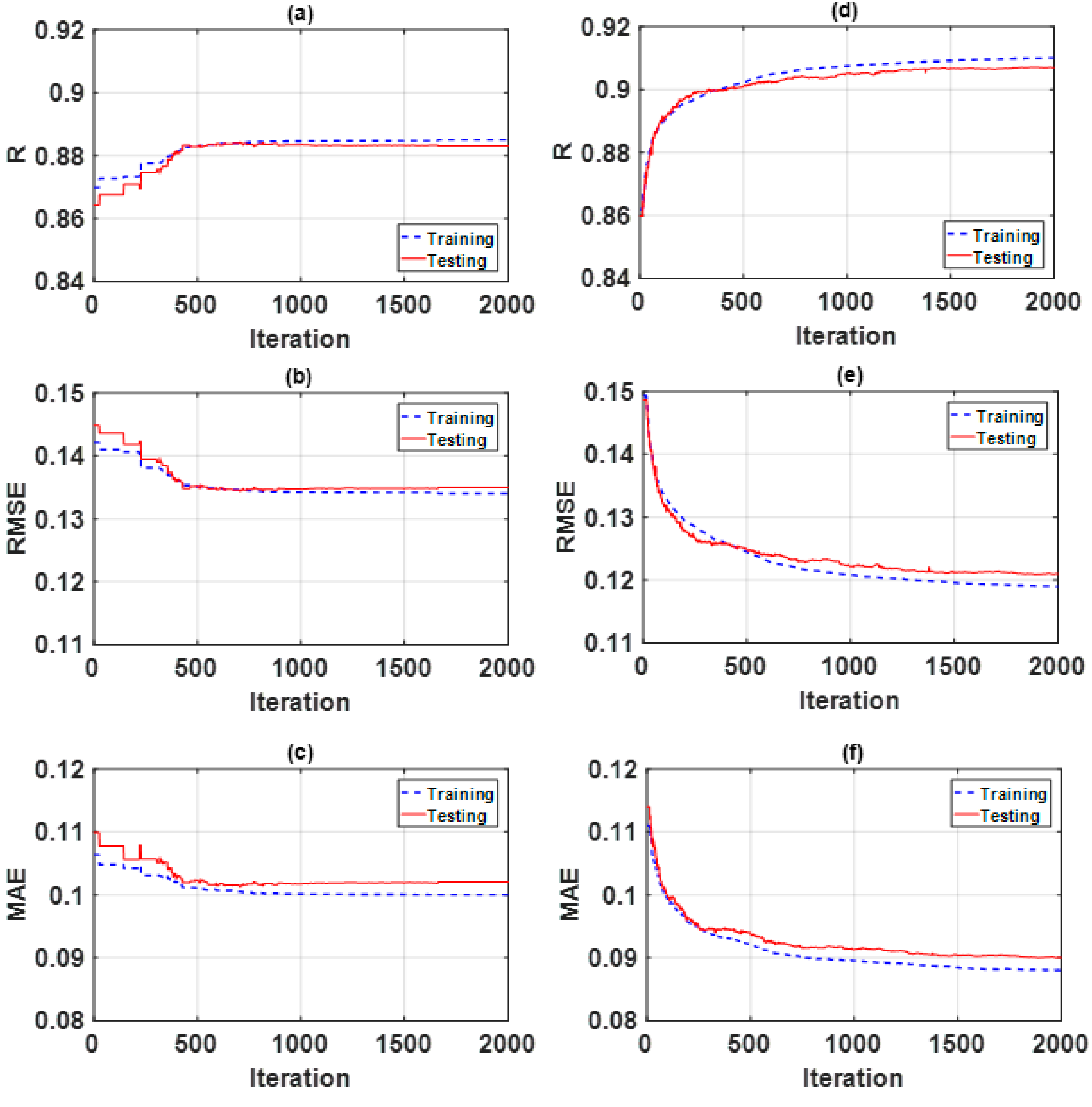
4.1. Optimization Procedure
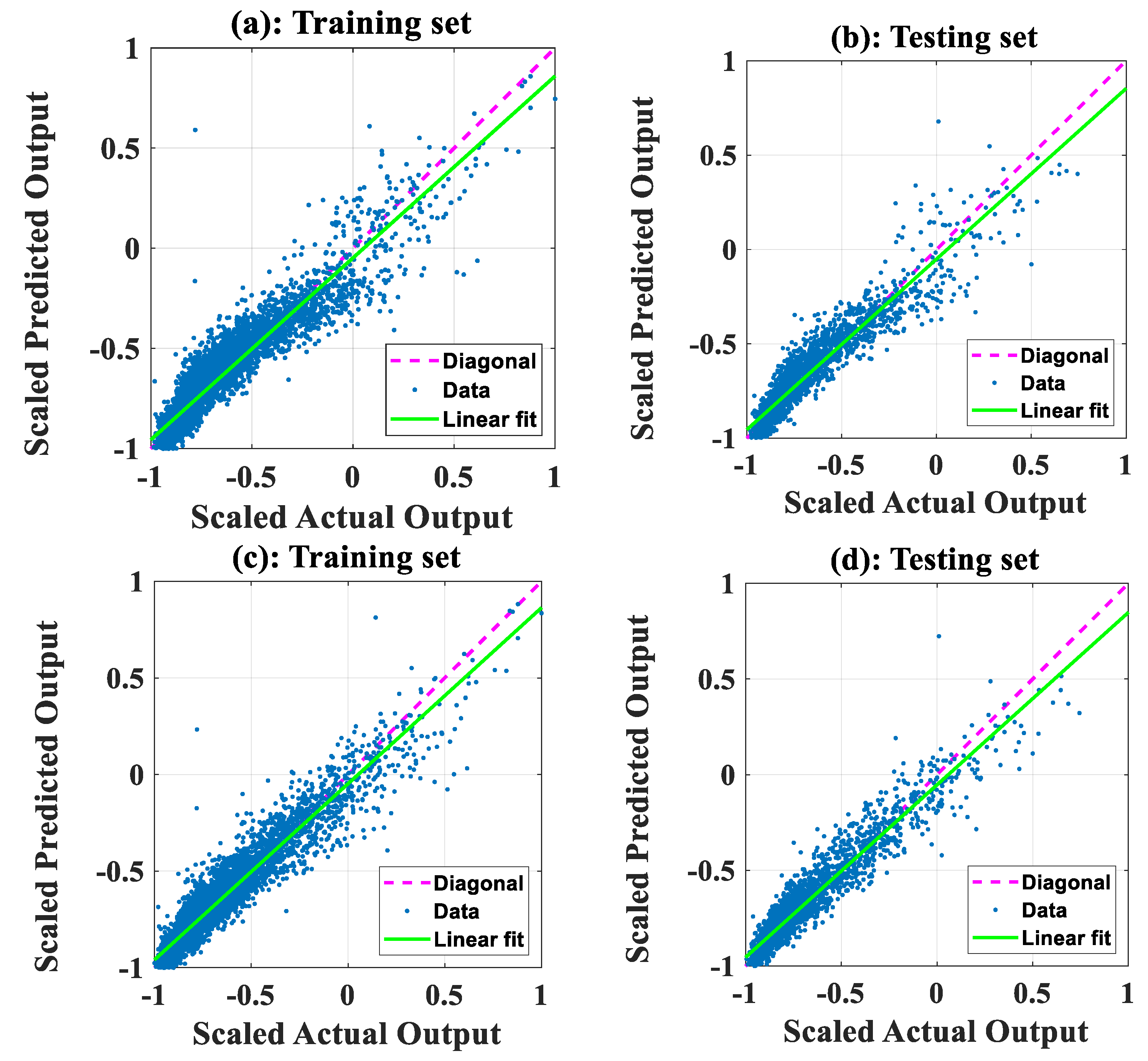
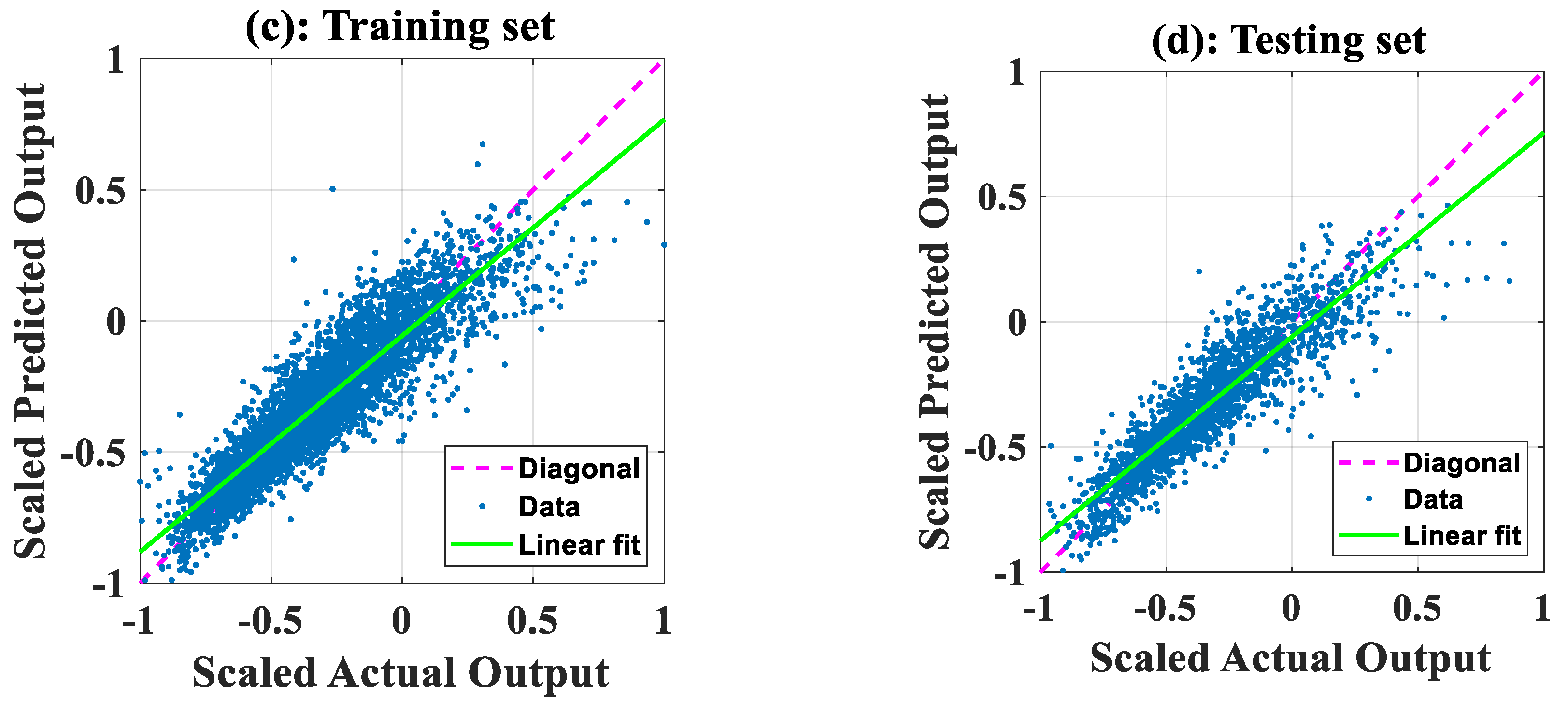
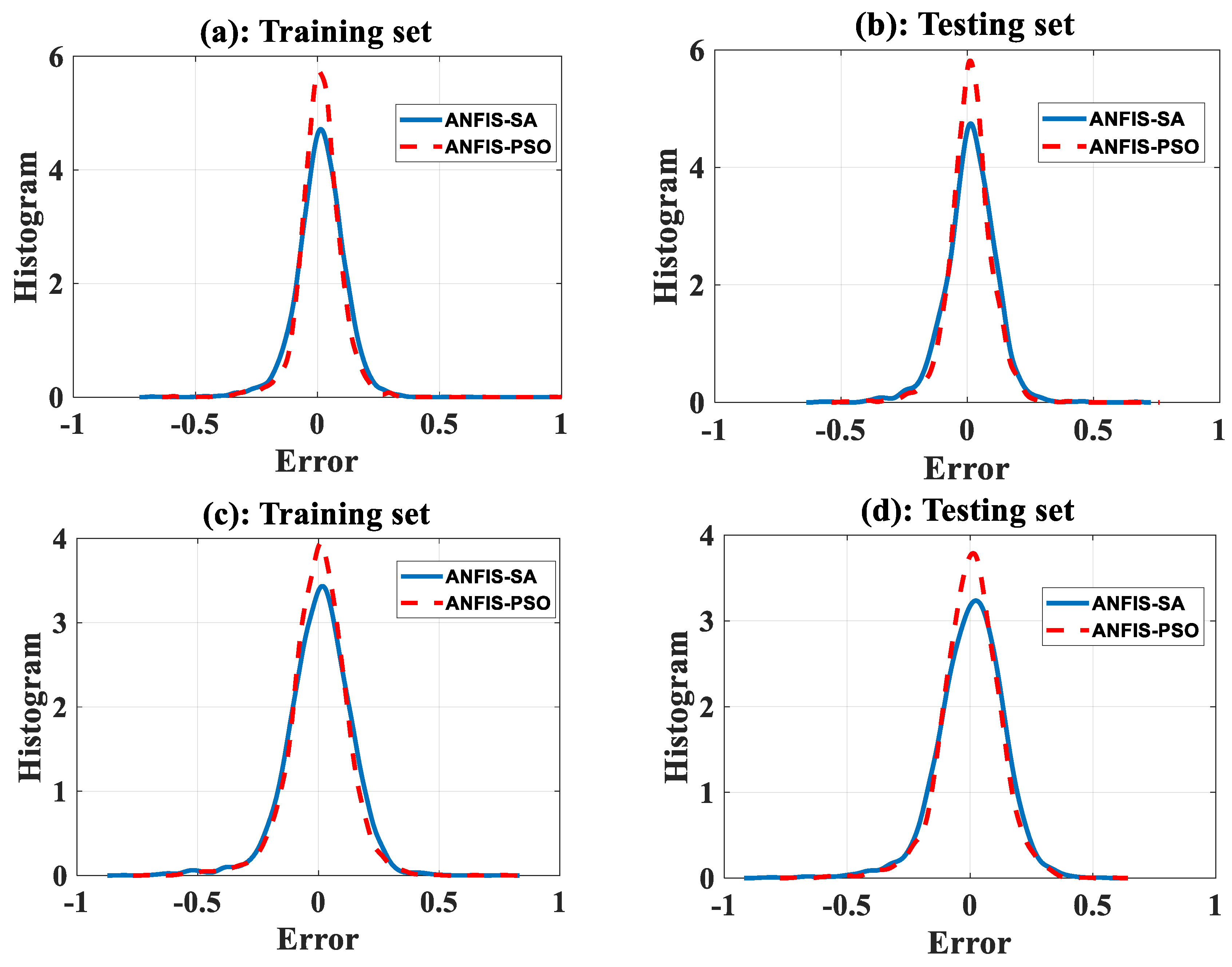
4.2. Model Performance
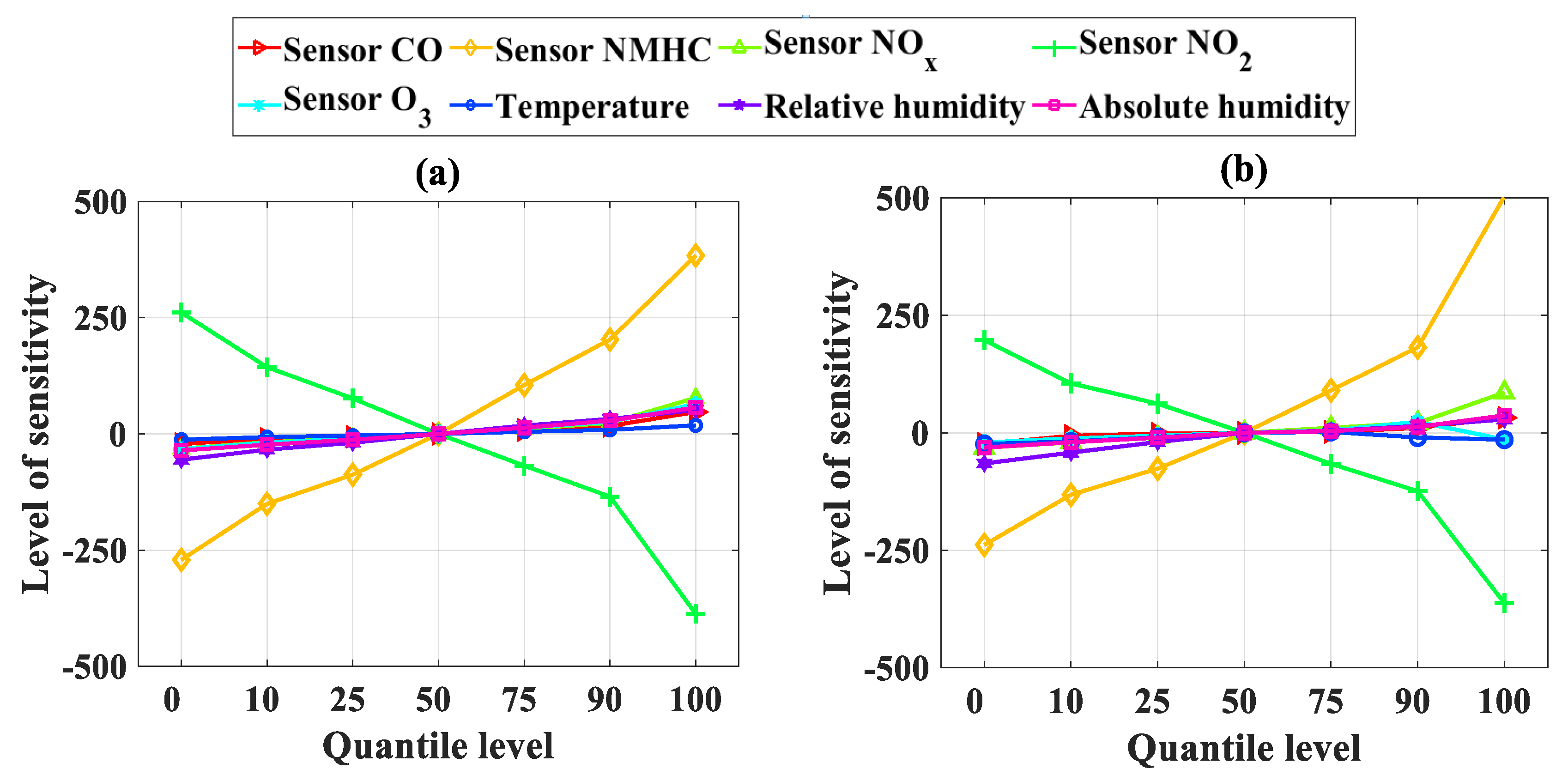
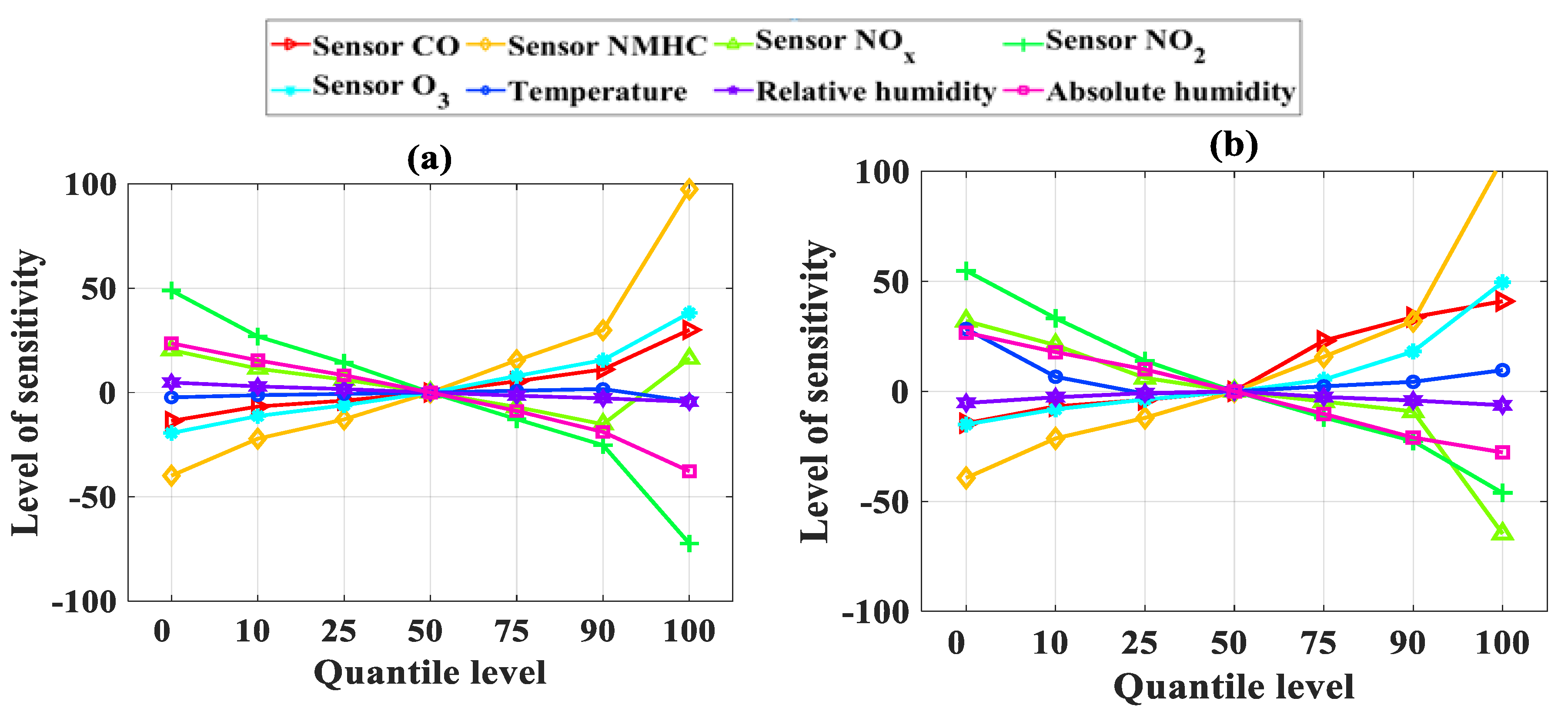
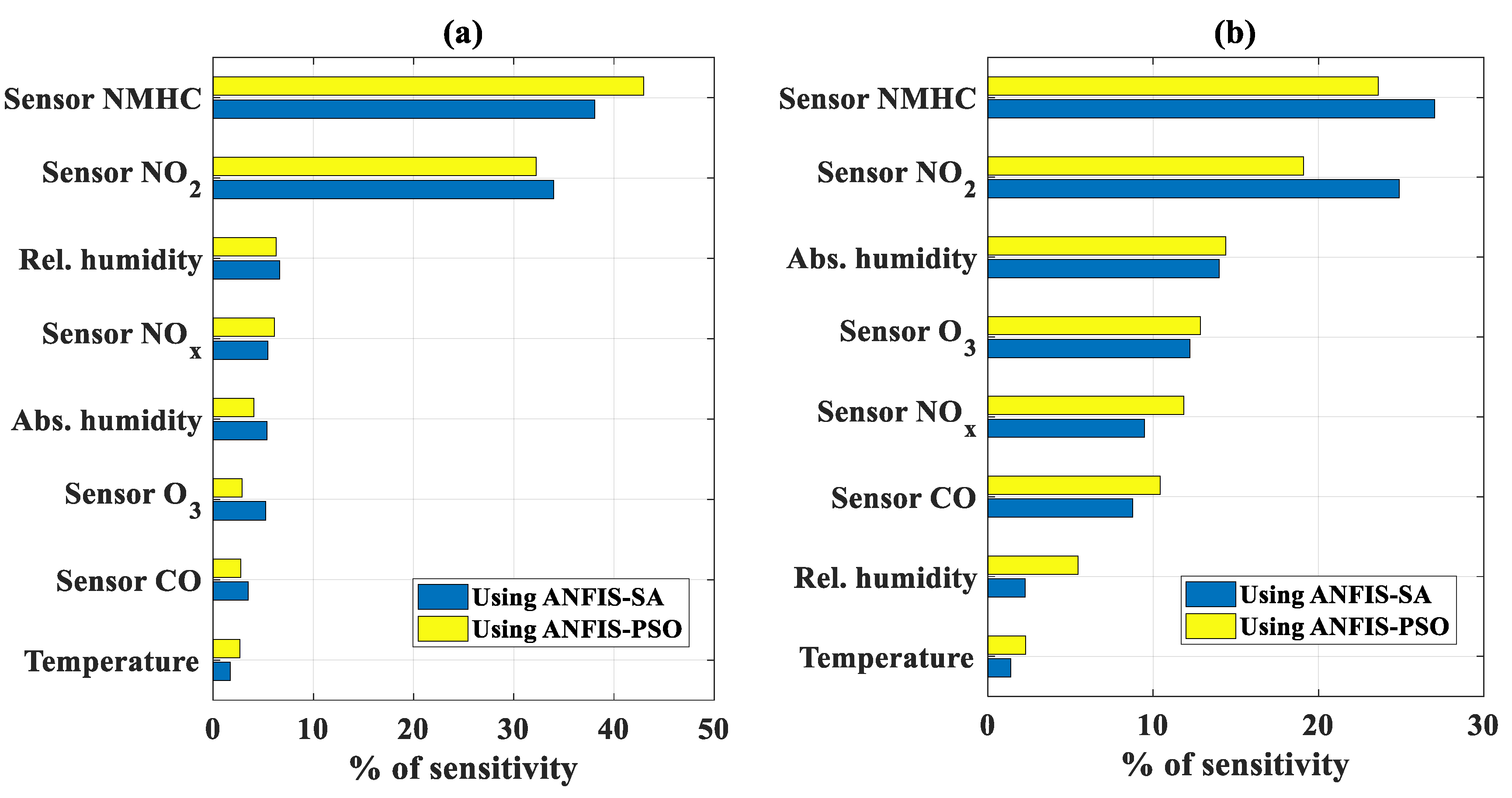
4.3. Sensitivity Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Derrible, S.; Saneinejad, S.; Sugar, L.; Kennedy, C. Macroscopic Model of Greenhouse Gas Emissions for Municipalities. Transp. Res. Rec. 2010, 2191, 174–181. [Google Scholar] [CrossRef]
- Anenberg, S.C.; Miller, J.; Minjares, R.; Du, L.; Henze, D.K.; Lacey, F.; Malley, C.S.; Emberson, L.; Franco, V.; Klimont, Z. Impacts and mitigation of excess diesel-related NOx emissions in 11 major vehicle markets. Nature 2017, 545, 467. [Google Scholar] [CrossRef] [PubMed]
- Streets, D.G.; Waldhoff, S.T. Present and future emissions of air pollutants in China: SO2, NOx, and CO. Atmos. Environ. 2000, 34, 363–374. [Google Scholar] [CrossRef]
- Miller, K.A.; Siscovick, D.S.; Sheppard, L.; Shepherd, K.; Sullivan, J.H.; Anderson, G.L.; Kaufman, J.D. Long-term exposure to air pollution and incidence of cardiovascular events in women. N. Engl. J. Med. 2007, 356, 447–458. [Google Scholar] [CrossRef]
- Raaschou-Nielsen, O.; Andersen, Z.J.; Hvidberg, M.; Jensen, S.S.; Ketzel, M.; Sørensen, M.; Loft, S.; Overvad, K.; Tjønneland, A. Lung cancer incidence and long-term exposure to air pollution from traffic. Environ. Health Perspect. 2011, 119, 860–865. [Google Scholar] [CrossRef]
- Raaschou-Nielsen, O.; Andersen, Z.J.; Beelen, R.; Samoli, E.; Stafoggia, M.; Weinmayr, G.; Hoffmann, B.; Fischer, P.; Nieuwenhuijsen, M.J.; Brunekreef, B.; et al. Air pollution and lung cancer incidence in 17 European cohorts: Prospective analyses from the European Study of Cohorts for Air Pollution Effects (ESCAPE). Lancet Oncol. 2013, 14, 813–822. [Google Scholar] [CrossRef]
- Beelen, R.; Hoek, G.; Van Den Brandt, P.A.; Goldbohm, R.A.; Fischer, P.; Schouten, L.J.; Armstrong, B.; Brunekreef, B. Long-term exposure to traffic-related air pollution and lung cancer risk. Epidemiology 2008, 19, 702. [Google Scholar] [CrossRef]
- Brunekreef, B.; Beelen, R.; Hoek, G.; Schouten, L.; Bausch-Goldbohm, S.; Fischer, P.; Armstrong, B.; Hughes, E.; Jerrett, M.; van den Brandt, P. Effects of long-term exposure to traffic-related air pollution on respiratory and cardiovascular mortality in the Netherlands: The NLCS-AIR study. Res. Rep. Health Eff. Inst. 2009, 139, 5–71. [Google Scholar]
- Hystad, P.; Demers, P.A.; Johnson, K.C.; Carpiano, R.M.; Brauer, M. Long-term residential exposure to air pollution and lung cancer risk. Epidemiology 2013, 1, 762–772. [Google Scholar] [CrossRef]
- Götschi, T.; Heinrich, J.; Sunyer, J.; Künzli, N. Long-term effects of ambient air pollution on lung function: A review. Epidemiology 2008, 19, 690–701. [Google Scholar] [CrossRef]
- Mohareb, E.; Derrible, S.; Peiravian, F. Intersections of Jane Jacobs’ Conditions for Diversity and Low-Carbon Urban Systems: A Look at Four Global Cities. J. Urban Plan. Dev. 2016, 142, 05015004. [Google Scholar] [CrossRef]
- Cimorelli, A.J.; Perry, S.G.; Venkatram, A.; Weil, J.C.; Paine, R.J.; Wilson, R.B.; Lee, R.F.; Peters, W.D.; Brode, R.W. AERMOD: A dispersion model for industrial source applications. Part I: General model formulation and boundary layer characterization. J. Appl. Meteorol. 2005, 44, 682–693. [Google Scholar] [CrossRef]
- Leelőssy, Á.; Molnár, F.; Izsák, F.; Havasi, Á.; Lagzi, I.; Mészáros, R. Dispersion modeling of air pollutants in the atmosphere: A review. Cent. Eur. J. Geosci. 2014, 6, 257–278. [Google Scholar] [CrossRef]
- Samson, P.J. Atmospheric Transport and Dispersion of Air Pollutants Associated with Vehicular Emissions; National Academies Press (US): Washington, DC, USA, 1988. [Google Scholar]
- Abiye, O.E.; Sunmonu, L.A.; Ajao, A.I.; Akinola, O.E.; Ayoola, M.A.; Jegede, O.O. Atmospheric dispersion modeling of uncontrolled gaseous pollutants (SO2 and NOx) emission from a scrap-iron recycling factory in Ile-Ife, Southwest Nigeria. Cogent Environ. Sci. 2016, 2, 1275413. [Google Scholar] [CrossRef]
- Kota, S.H.; Ying, Q.; Zhang, Y. Simulating near-road reactive dispersion of gaseous air pollutants using a three-dimensional Eulerian model. Sci. Total Environ. 2013, 454, 348–357. [Google Scholar] [CrossRef]
- Goyal, P.; Jaiswal, N. Effects of meteorological parameters on RSPM concentration in urban Delhi. Int. J. Environ. Waste Manag. 2010, 5, 237–251. [Google Scholar] [CrossRef]
- Nigam, S.; Nigam, R.; Kulshrestha, M.; Mittal, S.K. Carbon monoxide modeling studies: A review. Environ. Rev. 2010, 18, 137–158. [Google Scholar] [CrossRef]
- Paraschiv, D.; Tudor, C.; Petrariu, R. The Textile Industry and Sustainable Development: A Holt–Winters Forecasting Investigation for the Eastern European Area. Sustainability 2015, 7, 1280–1291. [Google Scholar] [CrossRef]
- Žabkar, R.; Honzak, L.; Skok, G.; Forkel, R.; Rakovec, J.; Ceglar, A.; Žagar, N. Evaluation of the high resolution WRF-Chem (v3.4.1) air quality forecast and its comparison with statistical ozone predictions. Geosci. Model Dev. 2015, 8, 2119–2137. [Google Scholar] [CrossRef]
- Garner, G.G.; Thompson, A.M. The Value of Air Quality Forecasting in the Mid-Atlantic Region. Weather Clim. Soc. 2011, 4, 69–79. [Google Scholar] [CrossRef]
- Abdullah, A.B.M.; Mitchell, D.; Pavur, R. An overview of forecast models evaluation for monitoring air quality management in the State of Texas, USA. Manag. Environ. Qual. Int. J. 2009, 20, 73–81. [Google Scholar] [CrossRef]
- Russo, A.; Lind, P.G.; Raischel, F.; Trigo, R.; Mendes, M. Daily pollution forecast using optimal meteorological data at synoptic and local scales. arXiv 2014, arXiv:14110701. [Google Scholar]
- Peng, J.; Huang, Y.; Liu, T.; Jiang, L.; Xu, Z.; Xing, W.; Feng, X.; De Maeyer, P. Atmospheric nitrogen pollution in urban agglomeration and its impact on alpine lake-case study of Tianchi Lake. Sci. Total Environ. 2019, 688, 312–323. [Google Scholar] [CrossRef] [PubMed]
- Sharma, R.; Kumar, R.; Sharma, D.K.; Son, L.H.; Priyadarshini, I.; Pham, B.T.; Tien Bui, D.; Rai, S. Inferring air pollution from air quality index by different geographical areas: Case study in India. Air Qual. Atmos. Health 2019. [Google Scholar] [CrossRef]
- Shi, J.P.; Harrison, R.M. Regression modelling of hourly NOx and NO2 concentrations in urban air in London. Atmos. Environ. 1997, 31, 4081–4094. [Google Scholar] [CrossRef]
- Lee, D.; Derrible, S.; Pereira, F.C. Comparison of Four Types of Artificial Neural Network and a Multinomial Logit Model for Travel Mode Choice Modeling. Transp. Res. Rec. 2018, 2672, 101–112. [Google Scholar] [CrossRef]
- Thanh, T.T.M.; Ly, H.-B.; Pham, B.T. A Possibility of AI Application on Mode-choice Prediction of Transport Users in Hanoi. In CIGOS 2019, Innovation for Sustainable Infrastructure; Ha-Minh, C., Dao, D.V., Benboudjema, F., Derrible, S., Huynh, D.V.K., Tang, A.M., Eds.; Springer: Singapore, 2019; pp. 1179–1184. [Google Scholar]
- Lee, D.; Derrible, S. Predicting Residential Water Consumption: Modeling Techniques and Data Perspectives. J. Water Resour. Plan. Manag. 2019, 146, 04019067. [Google Scholar] [CrossRef]
- Le, T.-T.; Pham, B.T.; Ly, H.-B.; Shirzadi, A.; Le, L.M. Development of 48-hour Precipitation Forecasting Model using Nonlinear Autoregressive Neural Network. In CIGOS 2019, Innovation for Sustainable Infrastructure; Ha-Minh, C., Dao, D.V., Benboudjema, F., Derrible, S., Huynh, D.V.K., Tang, A.M., Eds.; Springer: Singapore, 2019; pp. 1191–1196. [Google Scholar]
- Brunelli, U.; Piazza, V.; Pignato, L.; Sorbello, F.; Vitabile, S. Hourly Forecasting of SO2 Pollutant Concentration Using an Elman Neural Network. In Neural Nets; Apolloni, B., Marinaro, M., Nicosia, G., Tagliaferri, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 65–69. [Google Scholar]
- Comrie, A.C. Comparing Neural Networks and Regression Models for Ozone Forecasting. J. Air Waste Manag. Assoc. 1997, 47, 653–663. [Google Scholar] [CrossRef]
- Gardner, M.W.; Dorling, S.R. Neural network modelling and prediction of hourly NOx and NO2 concentrations in urban air in London. Atmos. Environ. 1999, 33, 709–719. [Google Scholar] [CrossRef]
- Jang, J.-S.R. Neuro-Fuzzy and Soft Computing: A Computational Approach to Learning and Machine Intelligence; Prentice Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Bilgehan, M. Comparison of ANFIS and NN models—With a study in critical buckling load estimation. Appl. Soft Comput. 2011, 11, 3779–3791. [Google Scholar] [CrossRef]
- Scherer, R. Takagi-Sugeno Fuzzy Systems. In Multiple Fuzzy Classification Systems; Scherer, R., Ed.; Studies in Fuzziness and Soft Computing; Springer: Berlin/Heidelberg, Germany, 2012; pp. 73–79. [Google Scholar]
- Dao, D.V.; Ly, H.-B.; Trinh, S.H.; Le, T.-T.; Pham, B.T. Artificial Intelligence Approaches for Prediction of Compressive Strength of Geopolymer Concrete. Materials 2019, 12, 983. [Google Scholar] [CrossRef]
- Termeh, S.V.R.; Khosravi, K.; Sartaj, M.; Keesstra, S.D.; Tsai, F.T.-C.; Dijksma, R.; Pham, B.T. Optimization of an adaptive neuro-fuzzy inference system for groundwater potential mapping. Hydrogeol. J. 2019, 27, 2511–2534. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Perera, R.; Arteaga, A.; Diego, A. De Artificial intelligence techniques for prediction of the capacity of RC beams strengthened in shear with external FRP reinforcement. Compos. Struct. 2010, 92, 1169–1175. [Google Scholar] [CrossRef] [Green Version]
- Sehgal, V.; Sahay, R.R.; Chatterjee, C. Effect of Utilization of Discrete Wavelet Components on Flood Forecasting Performance of Wavelet Based ANFIS Models. Water Resour. Manag. 2014, 28, 1733–1749. [Google Scholar] [CrossRef]
- Chen, W.; Panahi, M.; Pourghasemi, H.R. Performance evaluation of GIS-based new ensemble data mining techniques of adaptive neuro-fuzzy inference system (ANFIS) with genetic algorithm (GA), differential evolution (DE), and particle swarm optimization (PSO) for landslide spatial modelling. CATENA 2017, 157, 310–324. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R.C. Fuzzy adaptive particle swarm optimization. In Proceedings of the 2001 Congress on Evolutionary Computation (IEEE Cat. No. 01TH8546), Seoul, Korea, 27–30 May 2001; Volume 1, pp. 101–106. [Google Scholar]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Dao, D.V.; Trinh, S.H.; Ly, H.-B.; Pham, B.T. Prediction of Compressive Strength of Geopolymer Concrete Using Entirely Steel Slag Aggregates: Novel Hybrid Artificial Intelligence Approaches. Appl. Sci. 2019, 9, 1113. [Google Scholar] [CrossRef] [Green Version]
- Metropolis, N.; Rosenbluth, A.W.; Rosenbluth, M.N.; Teller, A.H.; Teller, E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953, 21, 1087–1092. [Google Scholar] [CrossRef] [Green Version]
- Aarts, E.; Korst, J.; Michiels, W. Simulated Annealing. In Search Methodologies: Introductory Tutorials in Optimization and Decision Support Techniques; Burke, E.K., Kendall, G., Eds.; Springer: Boston, MA, USA, 2005; pp. 187–210. [Google Scholar]
- Vidal, R.V.V. Lecture Notes in Economics and Mathematical Systems. In Applied Simulated Annealing; Springer: Berlin, Germany, 1993. [Google Scholar]
- Aguiar e Oliveira Junior, H.; Ingber, L.; Petraglia, A.; Rembold Petraglia, M.; Augusta Soares Machado, M. Metaheuristic Methods. In Stochastic Global Optimization and Its Applications with Fuzzy Adaptive Simulated Annealing; Aguiar e Oliveira Junior, H., Ingber, L., Petraglia, A., Rembold Petraglia, M., Augusta Soares Machado, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 21–30. [Google Scholar]
- Pham, D.; Karaboga, D. Intelligent Optimisation Techniques—Genetic Algorithms, Tabu Search, Simulated Annealing and Neural Networks; Springer: Berlin, Germany, 2000. [Google Scholar]
- Dréo, J.; Siarry, P.; Pétrowski, A.; Taillard, E. Metaheuristics for Hard Optimization; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Romary, T.; de Fouquet, C.; Malherbe, L. Sampling design for air quality measurement surveys: An optimization approach. Atmos. Environ. 2011, 45, 3613–3620. [Google Scholar] [CrossRef]
- Vincent, F.Y.; Redi, A.P.; Hidayat, Y.A.; Wibowo, O.J. A simulated annealing heuristic for the hybrid vehicle routing problem. Appl. Soft Comput. 2017, 53, 119–132. [Google Scholar]
- Pham, B.T.; Nguyen, M.D.; Dao, D.V.; Prakash, I.; Ly, H.-B.; Le, T.-T.; Ho, L.S.; Nguyen, K.T.; Ngo, T.Q.; Hoang, V.; et al. Development of artificial intelligence models for the prediction of Compression Coefficient of soil: An application of Monte Carlo sensitivity analysis. Sci. Total Environ. 2019, 679, 172–184. [Google Scholar] [CrossRef] [PubMed]
- Le, L.M.; Ly, H.-B.; Pham, B.T.; Le, V.M.; Pham, T.A.; Nguyen, D.-H.; Tran, X.-T.; Le, T.-T. Hybrid Artificial Intelligence Approaches for Predicting Buckling Damage of Steel Columns Under Axial Compression. Materials 2019, 12, 1670. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pham, B.T.; Nguyen, M.D.; Ly, H.-B.; Pham, T.A.; Hoang, V.; Van Le, H.; Le, T.-T.; Nguyen, H.Q.; Bui, G.L. Development of Artificial Neural Networks for Prediction of Compression Coefficient of Soft Soil. In CIGOS 2019, Innovation for Sustainable Infrastructure; Ha-Minh, C., Dao, D.V., Benboudjema, F., Derrible, S., Huynh, D.V.K., Tang, A.M., Eds.; Springer: Singapore, 2019; pp. 1167–1172. [Google Scholar]
- Ly, H.-B.; Desceliers, C.; Le, L.M.; Le, T.-T.; Pham, B.T.; Nguyen-Ngoc, L.; Doan, V.T.; Le, M. Quantification of Uncertainties on the Critical Buckling Load of Columns under Axial Compression with Uncertain Random Materials. Materials 2019, 12, 1828. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, H.-L.; Le, T.-H.; Pham, C.-T.; Le, T.-T.; Ho, L.S.; Le, V.M.; Pham, B.T.; Ly, H.-B. Development of Hybrid Artificial Intelligence Approaches and a Support Vector Machine Algorithm for Predicting the Marshall Parameters of Stone Matrix Asphalt. Appl. Sci. 2019, 9, 3172. [Google Scholar] [CrossRef] [Green Version]
- Ly, H.-B.; Pham, B.T.; Dao, D.V.; Le, V.M.; Le, L.M.; Le, T.-T. Improvement of ANFIS Model for Prediction of Compressive Strength of Manufactured Sand Concrete. Appl. Sci. 2019, 9, 3841. [Google Scholar] [CrossRef] [Green Version]
- De Vito, S.; Massera, E.; Piga, M.; Martinotto, L.; Di Francia, G. On field calibration of an electronic nose for benzene estimation in an urban pollution monitoring scenario. Sens. Actuators B Chem. 2008, 129, 750–757. [Google Scholar] [CrossRef]
- De Vito, S.; Piga, M.; Martinotto, L.; Di Francia, G. CO, NO2 and NOx urban pollution monitoring with on-field calibrated electronic nose by automatic bayesian regularization. Sens. Actuators B Chem. 2009, 143, 182–191. [Google Scholar] [CrossRef]
- Ly, H.-B.; Le, L.M.; Duong, H.T.; Nguyen, T.C.; Pham, T.A.; Le, T.-T.; Le, V.M.; Nguyen-Ngoc, L.; Pham, B.T. Hybrid Artificial Intelligence Approaches for Predicting Critical Buckling Load of Structural Members under Compression Considering the Influence of Initial Geometric Imperfections. Appl. Sci. 2019, 9, 2258. [Google Scholar] [CrossRef] [Green Version]
- Ly, H.-B.; Monteiro, E.; Le, T.-T.; Le, V.M.; Dal, M.; Regnier, G.; Pham, B.T. Prediction and Sensitivity Analysis of Bubble Dissolution Time in 3D Selective Laser Sintering Using Ensemble Decision Trees. Materials 2019, 12, 1544. [Google Scholar] [CrossRef] [Green Version]
- Dell’Acqua, F.; Iannelli, G.; Torres, M.; Martina, M. A Novel Strategy for Very-Large-Scale Cash-Crop Mapping in the Context of Weather-Related Risk Assessment, Combining Global Satellite Multispectral Datasets, Environmental Constraints, and In Situ Acquisition of Geospatial Data. Sensors 2018, 18, 591. [Google Scholar] [CrossRef] [Green Version]
- Alpers, W.; Dagestad, K.-F.; Wong, W.K.; Chan, P.W. A winter monsoon front over the South China Sea studied by multi-sensor satellite data, weather radar data, and a numerical model. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 2070–2073. [Google Scholar]
- Halem, M.; Most, N.; Tilmes, C.A.; Stewart, K.; Yesha, Y.; Chapman, D.; Nguyen, P.; Sensing, R. Service-oriented atmospheric radiances (SOAR): Gridding and analysis services for multisensor aqua IR radiance data for climate studies. IEEE Trans. Geosci. Remote Sens. 2008, 47, 114–122. [Google Scholar] [CrossRef]
- Beliatis, M.J.; Rozanski, L.J.; Jayawardena, K.I.; Rhodes, R.; Anguita, J.V.; Mills, C.A.; Silva, S.R.P. Hybrid and Nano-composite Carbon Sensing Platforms. In Carbon for Sensing Devices; Springer: Berlin, Germany, 2015; pp. 105–132. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Sensor CO | Sensor NMHC | Sensor NOx | Sensor NO2 | Sensor O3 | Temperature | Relative Humidity | Absolute Humidity | C(NO2) * | C(CO) ** |
|---|---|---|---|---|---|---|---|---|---|---|
| Role | Input | Input | Input | Input | Input | Input | Input | Input | Output | Output |
| Notation | X1 | X2 | X3 | X4 | X5 | X6 | X7 | X8 | X9 | X10 |
| Min (α) | 647 | 390 | 322 | 551 | 221 | −1.9 | 9.2 | 0.18 | 2 | 0.1 |
| Average | 1120 | 959 | 817 | 1453 | 1058 | 17.8 | 48.9 | 0.99 | 114 | 2.18 |
| Median | 1085 | 931 | 786 | 1457 | 1006 | 16.8 | 49.2 | 0.95 | 110 | 1.90 |
| Max (β) | 2040 | 2214 | 2683 | 2775 | 2523 | 44.6 | 88.7 | 2.2 | 333 | 11.9 |
| Std | 219 | 264 | 252 | 353 | 407 | 8.84 | 17.4 | 0.40 | 47 | 1.44 |
| CV (%) | 20 | 28 | 31 | 24 | 38 | 50 | 36 | 41 | 42 | 66 |
| Parameter | NO2 Concentration | CO Concentration |
|---|---|---|
| Population size | 40 | 60 |
| Maximum number of iterations | 1000 | 2000 |
| Initial temperature | 0.1 | 0.1 |
| Temperature reduction rate | 0.99 | 0.99 |
| Number of neighbors per individual | 5 | 5 |
| Mutation rate | 0.5 | 0.5 |
| Mutation standard deviation | 10% | 10% |
| Parameter | NO2 Concentration | CO Concentration |
|---|---|---|
| Swarm size | 30 | 50 |
| Maximum number of iterations | 1000 | 2000 |
| Inertia weight | 0.4 | 0.4 |
| Personal learning coefficient | 1 | 1 |
| Global learning coefficient | 2 | 2 |
| Maximum velocity | 5 | 5 |
| Minimum velocity | −5 | −5 |
| Output | Dataset | Model | R | RMSE | MAE | Std Error | Slope |
|---|---|---|---|---|---|---|---|
| Concentration of NO2 | Training | ANFIS-SA | 0.934 | 0.103 | 0.075 | 0.102 | 42.23 |
| ANFIS-PSO | 0.950 | 0.090 | 0.063 | 0.089 | 42.34 | ||
| Testing | ANFIS-SA | 0.935 | 0.101 | 0.075 | 0.100 | 42.11 | |
| ANFIS-PSO | 0.951 | 0.088 | 0.064 | 0.087 | 42.03 | ||
| Concentration of CO | Training | ANFIS-SA | 0.885 | 0.134 | 0.100 | 0.134 | 37.73 |
| ANFIS-PSO | 0.910 | 0.119 | 0.088 | 0.119 | 39.51 | ||
| Testing | ANFIS-SA | 0.883 | 0.135 | 0.102 | 0.135 | 37.65 | |
| ANFIS-PSO | 0.907 | 0.121 | 0.090 | 0.121 | 39.16 |
| Variable/Percentile | P0 | P10 | P25 | P50 | P75 | P90 | P100 |
|---|---|---|---|---|---|---|---|
| Sensor CO | −1.00 | −0.68 | −0.55 | −0.38 | −0.13 | 0.13 | 1.00 |
| Sensor NMHC | −1.00 | −0.74 | −0.61 | −0.42 | −0.19 | 0.02 | 1.00 |
| Sensor NOx | −1.00 | −0.83 | −0.73 | −0.61 | −0.47 | −0.31 | 1.00 |
| Sensor NO2 | −1.00 | −0.64 | −0.43 | −0.19 | 0.02 | 0.22 | 1.00 |
| Sensor O3 | −1.00 | −0.72 | −0.54 | −0.32 | −0.05 | 0.22 | 1.00 |
| Temperature | −1.00 | −0.64 | −0.44 | −0.20 | 0.10 | 0.37 | 1.00 |
| Relative humidity | −1.00 | −0.60 | −0.32 | 0.04 | 0.37 | 0.64 | 1.00 |
| Absolute humidity | −1.00 | −0.73 | −0.50 | −0.23 | 0.06 | 0.39 | 1.00 |
| Output | Model Used | Variable | Q0 | Q10 | Q25 | Q75 | Q90 | Q100 |
|---|---|---|---|---|---|---|---|---|
| Concentration of NO2 | ANFIS-SA | Sensor CO | −21.37 | −10.57 | −6.11 | 8.44 | 17.36 | 47.12 |
| Sensor NMHC | −270.95 | −150.42 | −87.62 | 105.13 | 203.01 | 383.83 | ||
| Sensor NOx | −31.77 | −17.89 | −9.63 | 10.89 | 23.76 | 77.76 | ||
| Sensor NO2 | 261.32 | 143.70 | 76.46 | −68.35 | −134.97 | −387.09 | ||
| Sensor O3 | −32.66 | −18.99 | −10.31 | 13.29 | 26.12 | 64.10 | ||
| Temperature | −12.33 | −6.84 | −3.70 | 4.62 | 8.77 | 18.41 | ||
| Relative humidity | −55.45 | −33.83 | −18.95 | 17.94 | 32.28 | 51.37 | ||
| Absolute humidity | −35.46 | −23.21 | −12.45 | 13.31 | 28.47 | 56.79 | ||
| ANFIS-PSO | Sensor CO | −23.66 | −6.49 | −1.72 | 1.92 | 10.26 | 31.96 | |
| Sensor NMHC | −238.61 | −131.82 | −76.29 | 90.17 | 181.71 | 503.04 | ||
| Sensor NOx | −31.78 | −20.34 | −9.95 | 10.62 | 21.01 | 85.62 | ||
| Sensor NO2 | 197.17 | 105.12 | 62.02 | −66.11 | −124.34 | −362.43 | ||
| Sensor O3 | −20.76 | −11.92 | −6.43 | 5.03 | 23.26 | −14.37 | ||
| Temperature | −23.93 | −18.44 | −9.76 | 1.85 | −9.99 | −14.60 | ||
| Relative humidity | −65.34 | −42.17 | −19.60 | 4.16 | 14.59 | 28.51 | ||
| Absolute humidity | −31.50 | −20.21 | −10.33 | 3.67 | 12.48 | 36.95 | ||
| Concentration of CO | ANFIS-SA | Sensor CO | −13.61 | −6.73 | −3.89 | 5.38 | 11.05 | 30.00 |
| Sensor NMHC | −39.86 | −22.13 | −12.89 | 15.47 | 29.87 | 97.39 | ||
| Sensor NOx | 20.32 | 11.44 | 6.16 | −6.96 | −15.19 | 16.31 | ||
| Sensor NO2 | 48.86 | 26.87 | 14.30 | −12.78 | −25.23 | −72.37 | ||
| Sensor O3 | −19.42 | −11.29 | −6.13 | 7.90 | 15.53 | 38.11 | ||
| Temperature | −2.34 | −1.30 | −0.70 | 0.88 | 1.67 | −4.24 | ||
| Relative humidity | 4.78 | 2.92 | 1.63 | −1.55 | −2.78 | −4.43 | ||
| Absolute humidity | 23.56 | 15.42 | 8.27 | −8.84 | −18.92 | −37.73 | ||
| ANFIS-PSO | Sensor CO | −14.49 | −6.86 | −3.87 | 23.01 | 33.73 | 40.94 | |
| Sensor NMHC | −39.36 | −21.38 | −12.07 | 15.71 | 31.91 | 105.58 | ||
| Sensor NOx | 32.00 | 21.01 | 6.11 | −4.66 | −9.13 | −64.71 | ||
| Sensor NO2 | 54.82 | 33.23 | 13.90 | −11.84 | −22.59 | −46.19 | ||
| Sensor O3 | −15.02 | −8.14 | −3.72 | 5.30 | 18.09 | 49.56 | ||
| Temperature | 28.37 | 6.63 | −1.08 | 2.28 | 4.32 | 9.63 | ||
| Relative humidity | −5.28 | −2.71 | −0.80 | −2.57 | −4.15 | −6.30 | ||
| Absolute humidity | 26.66 | 17.85 | 9.96 | −10.23 | −21.02 | −27.74 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ly, H.-B.; Le, L.M.; Phi, L.V.; Phan, V.-H.; Tran, V.Q.; Pham, B.T.; Le, T.-T.; Derrible, S. Development of an AI Model to Measure Traffic Air Pollution from Multisensor and Weather Data. Sensors 2019, 19, 4941. https://doi.org/10.3390/s19224941
Ly H-B, Le LM, Phi LV, Phan V-H, Tran VQ, Pham BT, Le T-T, Derrible S. Development of an AI Model to Measure Traffic Air Pollution from Multisensor and Weather Data. Sensors. 2019; 19(22):4941. https://doi.org/10.3390/s19224941
Chicago/Turabian StyleLy, Hai-Bang, Lu Minh Le, Luong Van Phi, Viet-Hung Phan, Van Quan Tran, Binh Thai Pham, Tien-Thinh Le, and Sybil Derrible. 2019. "Development of an AI Model to Measure Traffic Air Pollution from Multisensor and Weather Data" Sensors 19, no. 22: 4941. https://doi.org/10.3390/s19224941
APA StyleLy, H. -B., Le, L. M., Phi, L. V., Phan, V. -H., Tran, V. Q., Pham, B. T., Le, T. -T., & Derrible, S. (2019). Development of an AI Model to Measure Traffic Air Pollution from Multisensor and Weather Data. Sensors, 19(22), 4941. https://doi.org/10.3390/s19224941