Improvement of Fast Model-Based Acceleration of Parameter Look-Locker T1 Mapping


Abstract
:1. Introduction
2. Materials and Methods
2.1. Original Data
- In-vivo studies of the brains of seven healthy volunteers (aged between 23 and 30 years) for field of view (FoV) ranging from 200 × 200 to 220 × 220 mm2, slice thickness: 4 mm, TE = 2.5 ms, TR = 6 ms, flip angle: 7°, total time of scan 6 s with a golden ratio radial k-space trajectory.
- Additionally, a fully sampled IR-LL dataset of single 2D slice was acquired using the segmented process in order to obtain reference data. A single acquisition of one segment (single IR-LL measurements) took 6 s (each of which was followed by a 15 s break) and was repeated 100 times in order to fulfill k-space with single lines of data. For in vivo measurements a total time scan was reduced to approximately 30 min.
- np—number of projections (i.e., 999 original projections),
- nc—number of coils (i.e., four coils covering whole head for each projection),
- nr—number of readout points (i.e., 256 points given in k-space for each coil and projection).
2.2. Hardware Specification
2.3. Processing Scheme
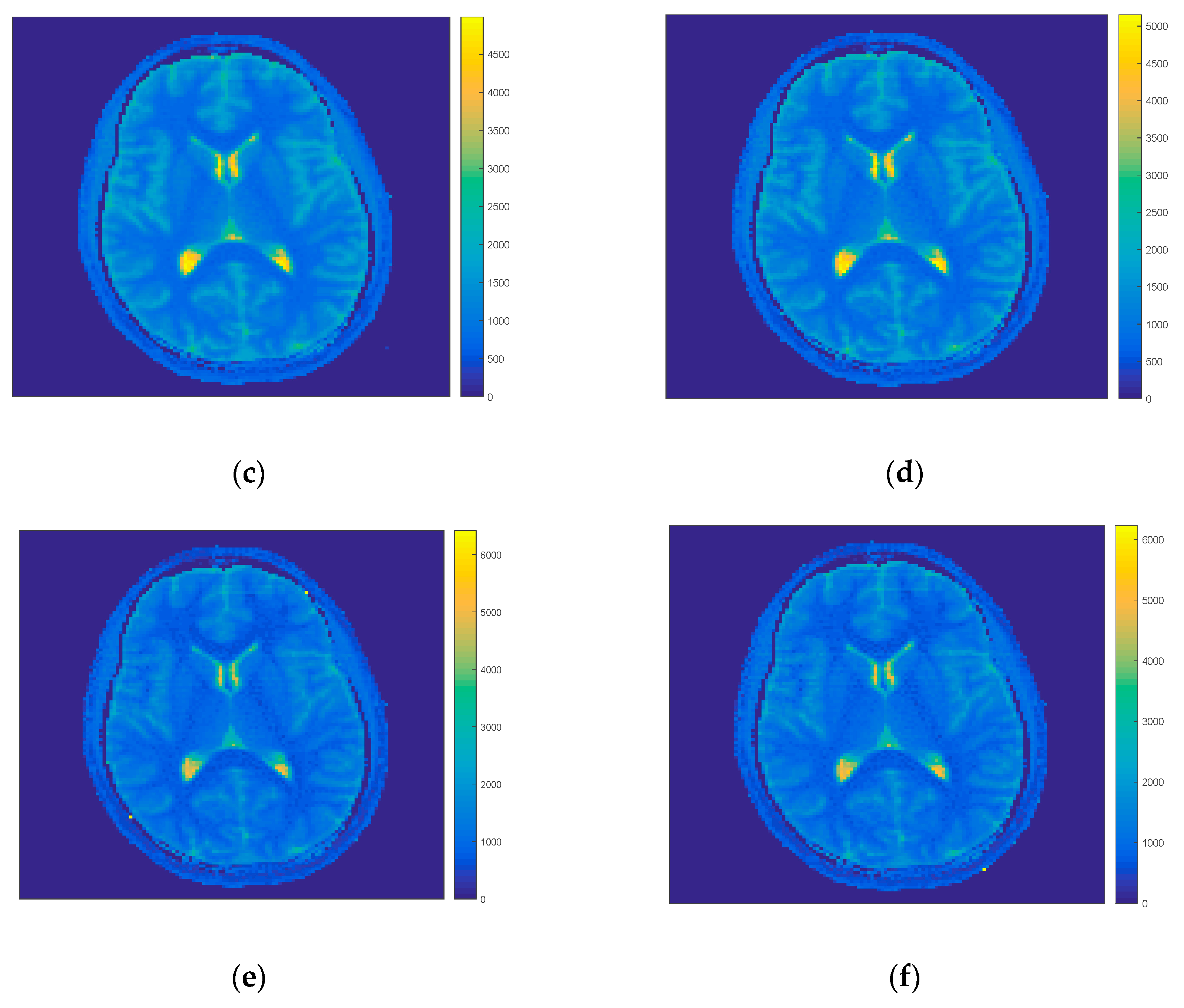
- Original projections (a) for all coils were used to create the initial starting model (b) for which T1* was assumed to be equal for the sake of simplicity at the beginning.
- The model (as imaged) was created for all coils and projections (c).
- The consistent model (d) was generated by taking Fourier transformation (FT) of the initial starting model (b) and reinsertion of the original projections (a) in k-space. The consistent model (e) in the next steps was used in the image space.
- The first part of pixel-wise fitting (g) was performed on the consistent model for each projection combined for all coils (f).
- The second part of pixel-wise fitting (h) bases on the consistent model for each projection and for each coil (e) and the results of the first part of fitting (g).
- The iteration process repeats again from evaluation of model (c).
2.3.1. Initial Starting Model for First Iteration of the FIR-MAP
- OFM—original first model - original projections in the Cartesian grid in the first model [13], which due to the high number of required iterations were skipped in this study,
- IFM—interpolated first model of all acquired k-spaces points through time [14] by performing a linear interpolation in order to improve convergence of incomplete k-space not covered by any data points,
- MFM—our proposition—mean first model, which is calculated by taking all original projections. In the evaluation of MFM only non-zero values are taken to the mean for the resulting k-space for each coil (points that are not covered by any projections are not taken to the mean). After FT the combined image for each coil is treated as in simplified formula for = 1000:
2.3.2. Consistent Model, Termination Criterion and Coil Combination
2.3.3. Two Steps Fitting Procedure—the First Step
2.3.4. Two Steps Fitting Procedure—the Second Step
2.4. Reduced Number of Projections
3. Results
3.1. Single Slice Analysis with Total Number of Projections
3.2. Improvement of Single Slice Analysis
- The reinsertion of original data into the model and calculation of combination of all coils took 20 s.
- The first step of 3-parameter fitting of model ran 5.5 s in parallel (20 s sequentially).
- The second step of one parameter linearized fit required 4.5 s.
3.3. Simulation of Using a Reduced Number of Projections
4. Discussion
4.1. Two Steps Fitting
4.2. Time Complexity
4.3. Further Development
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| V1 | V2 | V3 | V4 | V5 | V6 | V7 | Mean | Mean/Std | |
|---|---|---|---|---|---|---|---|---|---|
| White Matter (WM) | |||||||||
| FIR-MAP-IFM | 733 | 700 | 740 | 685 | 677 | 725 | 778 | 720 | 9 |
| 82 | 78 | 68 | 77 | 81 | 100 | 66 | 79 | ||
| FIR-MAP-MFM | 725 | 706 | 722 | 674 | 684 | 705 | 755 | 710 | 23 |
| 32 | 28 | 30 | 37 | 34 | 35 | 24 | 31 | ||
| IR-MAP | 738 | 706 | 740 | 688 | 679 | 726 | 779 | 722 | 9 |
| 82 | 76 | 68 | 78 | 82 | 99 | 63 | 78 | ||
| REF | 734 | 709 | 712 | 695 | 693 | 698 | 744 | 712 | 32 |
| 16 | 42 | 21 | 31 | 17 | 17 | 11 | 22 | ||
| Grey Matter (GM) | |||||||||
| FIR-MAP-IFM | 1435 | 1407 | 1454 | 1447 | 1426 | 1401 | 1420 | 1427 | 9 |
| 131 | 84 | 160 | 207 | 273 | 89 | 170 | 159 | ||
| FIR-MAP-MFM | 1415 | 1365 | 1438 | 1419 | 1415 | 1401 | 1394 | 1407 | 12 |
| 89 | 63 | 113 | 154 | 246 | 45 | 94 | 115 | ||
| IR-MAP | 1447 | 1405 | 1459 | 1453 | 1429 | 1400 | 1430 | 1432 | 9 |
| 127 | 85 | 159 | 207 | 286 | 90 | 178 | 162 | ||
| REF | 1436 | 1385 | 1402 | 1378 | 1401 | 1400 | 1409 | 1402 | 12 |
| 94 | 98 | 158 | 147 | 192 | 58 | 71 | 117 | ||
| Cerebrospinal Fluid (CSF) | |||||||||
| FIR-MAP-IFM | 4598 | 4508 | 4466 | 4043 | 4364 | 4056 | 4343 | 4340 | 7 |
| 586 | 633 | 702 | 450 | 874 | 304 | 667 | 602 | ||
| FIR-MAP-MFM | 4295 | 4106 | 4142 | 3772 | 4083 | 3704 | 4009 | 4016 | 9 |
| 424 | 559 | 562 | 344 | 738 | 167 | 486 | 469 | ||
| IR-MAP | 4603 | 4585 | 4473 | 3990 | 4387 | 4057 | 4360 | 4351 | 7 |
| 646 | 669 | 720 | 506 | 925 | 364 | 726 | 651 | ||
| REF | 4296 | 4082 | 3877 | 3924 | 4061 | 3236 | 3878 | 3908 | 7 |
| 494 | 620 | 700 | 348 | 911 | 249 | 564 | 555 | ||
| V1 | V2 | V3 | V4 | V5 | V6 | V7 | Mean | Mean/Std | |
|---|---|---|---|---|---|---|---|---|---|
| White Matter (WM) | |||||||||
| FIR-MAP-MFM-2 | 704 | 699 | 710 | 673 | 671 | 721 | 731 | 701 | 17 |
| 34 | 49 | 37 | 47 | 39 | 44 | 35 | 41 | ||
| FIR-MAP-IFM-2 | 721 | 697 | 737 | 683 | 674 | 732 | 773 | 717 | 9 |
| 81 | 79 | 68 | 75 | 82 | 100 | 66 | 79 | ||
| FIR-MAP-MFM-6 | 674 | 743 | 679 | 691 | 687 | 738 | 696 | 701 | 10 |
| 72 | 58 | 78 | 73 | 61 | 55 | 81 | 68 | ||
| FIR-MAP-IFM-6 | 694 | 710 | 718 | 676 | 662 | 751 | 756 | 710 | 9 |
| 81 | 80 | 67 | 75 | 85 | 105 | 70 | 80 | ||
| Grey Matter (GM) | |||||||||
| FIR-MAP-MFM-2 | 1426 | 1368 | 1409 | 1403 | 1401 | 1414 | 1393 | 1402 | 12 |
| 89 | 67 | 105 | 153 | 241 | 58 | 92 | 115 | ||
| FIR-MAP-IFM-2 | 1444 | 1409 | 1446 | 1439 | 1421 | 1406 | 1417 | 1426 | 9 |
| 134 | 85 | 164 | 206 | 274 | 92 | 173 | 161 | ||
| FIR-MAP-MFM-6 | 1398 | 1348 | 1359 | 1347 | 1336 | 1394 | 1405 | 1370 | 11 |
| 104 | 83 | 175 | 155 | 218 | 60 | 104 | 128 | ||
| FIR-MAP-IFM-6 | 1447 | 1389 | 1453 | 1422 | 1369 | 1400 | 1432 | 1416 | 9 |
| 132 | 84 | 173 | 206 | 267 | 93 | 174 | 161 | ||
| Cerebrospinal Fluid (CSF) | |||||||||
| FIR-MAP-MFM-2 | 4298 | 4038 | 4088 | 3743 | 3965 | 3623 | 3956 | 3959 | 9 |
| 467 | 551 | 538 | 314 | 689 | 155 | 496 | 459 | ||
| FIR-MAP-IFM-2 | 4602 | 4504 | 4467 | 4047 | 4337 | 4035 | 4330 | 4332 | 7 |
| 593 | 628 | 695 | 443 | 864 | 287 | 668 | 597 | ||
| FIR-MAP-MFM-6 | 3940 | 3778 | 3902 | 3506 | 3749 | 3537 | 3722 | 3733 | 9 |
| 343 | 513 | 511 | 181 | 657 | 203 | 450 | 408 | ||
| FIR-MAP-IFM-6 | 4575 | 4480 | 4454 | 4034 | 4311 | 4024 | 4288 | 4309 | 7 |
| 562 | 623 | 672 | 429 | 869 | 312 | 654 | 589 | ||
| V1 | V2 | V3 | V4 | V5 | V6 | V7 | Mean | Mean/Std | |
|---|---|---|---|---|---|---|---|---|---|
| White Matter (WM) | |||||||||
| FIR-MAP-MFM-2 | 705 | 698 | 708 | 675 | 670 | 725 | 731 | 702 | 18 |
| 31 | 50 | 34 | 47 | 39 | 44 | 36 | 40 | ||
| FIR-MAP-MFM-6 | 668 | 740 | 681 | 687 | 700 | 745 | 702 | 703 | 11 |
| 66 | 55 | 66 | 68 | 56 | 55 | 83 | 64 | ||
| Grey Matter (GM) | |||||||||
| FIR-MAP-MFM-2 | 1431 | 1374 | 1407 | 1406 | 1401 | 1418 | 1398 | 1405 | 12 |
| 93 | 72 | 101 | 153 | 233 | 55 | 92 | 114 | ||
| FIR-MAP-MFM-6 | 1395 | 1349 | 1370 | 1349 | 1344 | 1392 | 1406 | 1372 | 10 |
| 117 | 90 | 201 | 156 | 217 | 61 | 104 | 135 | ||
| Cerebrospinal Fluid (CSF) | |||||||||
| FIR-MAP-MFM-2 | 4305 | 4042 | 4078 | 3756 | 3974 | 3620 | 3960 | 3962 | 9 |
| 455 | 563 | 527 | 324 | 692 | 190 | 495 | 464 | ||
| FIR-MAP-MFM-6 | 3931 | 3653 | 3810 | 3480 | 3668 | 3446 | 3662 | 3664 | 9 |
| 327 | 566 | 535 | 214 | 636 | 252 | 440 | 424 | ||


References
- Deoni, S.C. Quantitative relaxometry of the brain. Top. Magn. Reson. Imaging 2010, 21, 101–113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, H.L.; Stikov, N.; Ghugre, N.R.; Wright, G.A. Practical medical applications of quantitative MR relaxometry. J. Magn. Reson. Imaging 2012, 36, 805–824. [Google Scholar] [CrossRef] [PubMed]
- Tran-Gia, J.; Bisdas, S.; Köstler, H.; Klose, U. A model-based reconstruction technique for fast dynamic T1 mapping. Magn. Reson. Imaging 2016, 34, 298–307. [Google Scholar] [CrossRef] [PubMed]
- Look, D.C.; Locker, D.R. Time Saving in Measurement of NMR and EPR Relaxation Times. Rev. Sci. Instrum. 1970, 41, 250. [Google Scholar] [CrossRef] [Green Version]
- Kaptein, R.; Dijkstra, K.; ETarr, C. A single-scan fourier transform method for measuring spin-lattice relaxation times. J. Magn. Reson. 1969, 24, 295–300. [Google Scholar] [CrossRef]
- Fessler, J.A. Model-based Image Reconstruction for MRI. IEEE Signal Process. Mag. 2010, 27, 81–89. [Google Scholar] [CrossRef] [Green Version]
- Block, K.T.; Uecker, M.; Frahm, J. Model-based iterative reconstruction for radial fast spin-echo MRI. IEEE Trans. Med. Imaging 2009, 28, 1759–1769. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Lam, F.; Liang, Z.P. Model-based MR parameter mapping with sparsity constraints: Parameter estimation and performance bounds. IEEE Trans. Med. Imaging 2014, 33, 1832–1844. [Google Scholar] [CrossRef] [Green Version]
- Knoll, F.; Raya, J.G.; Halloran, R.O.; Baete, S.; Sigmund, E.; Bammer, R.; Block, T.; Otazo, R.; Sodickson, D.K. A model-based reconstruction for undersampled radial spin-echo DTI with variational penalties on the diffusion tensor. NMR Biomed. 2015, 28, 353–366. [Google Scholar] [CrossRef] [Green Version]
- Tan, Z.; Roeloffs, V.; Voit, D.; Joseph, A.A.; Untenberger, M.; Merboldt, K.D.; Frahm, J. Model-based reconstruction for real-time phase-contrast flow MRI: Improved spatiotemporal accuracy. Magn. Reson. Med. 2017, 77, 1082–1093. [Google Scholar] [CrossRef]
- Sumpf, T.; Uecker, M.; Boretius, S.; Frahm, J. Model-based nonlinear inverse reconstruction for T2 mapping using highly undersampled spin-echo MRI. J. Magn. Reson. Imaging 2011, 34, 420–428. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Olafsson, V.; Noll, D.C.; Fessler, J. Fast joint reconstruction of dynamic R2 and field maps in functional MRI. IEEE Trans. Med. Imaging 2008, 27, 1177–1188. [Google Scholar] [CrossRef] [PubMed]
- Tran-Gia, J.; Stäb, D.; Wech, T.; Hahn, D.; Köstler, H. Model-based Acceleration of Parameter mapping (MAP) for saturation prepared radially acquired data. Magn. Reson. Med. 2013, 70, 1524–1534. [Google Scholar] [CrossRef] [PubMed]
- Tran-Gia, J.; Wech, T.; Bley, T.; Köstler, H. Model-based acceleration of look-locker T1 mapping. PLoS ONE 2015, 10. [Google Scholar] [CrossRef] [PubMed]
- Doneva, M.; Börnert, P.; Eggers, H.; Stehning, C.; Sénégas, J.; Mertins, A. Compressed sensing reconstruction for magnetic resonance parameter mapping. Magn. Reson. Med. 2010, 64, 1114–1120. [Google Scholar] [CrossRef]
- Wang, X.; Roeloffs, V.; Merboldt, D.; Voit, D.; Schätz, S.; Frahm, J. Single-shot Multi-slice T1 Mapping at High Spatial Resolution–Inversion- Recovery FLASH with Radial Undersampling and Iterative Reconstruction. Open Med Imaging J. 2015, 9, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Joseph, A.; Kalentev, O.; Merboldt, K.D.; Voit, D.; Roeloffs, V.B.; van Zalk, M.; Frahm, J. High-resolution myocardial T1 mapping using single-shot inversion recovery fast low-angle shot MRI with radial undersampling and iterative reconstruction. Br. J. Radiol. 2016, 89, 20160255. [Google Scholar] [CrossRef]
- Roeloffs, V.; Wang, X.; Sumpf, T.J.; Untenberger, M.; Voit, D.; Frahm, J. Model-based reconstruction for T1 mapping using single-shot inversion-recovery radial FLASH. Int. J. Imaging Syst. Technol. 2016, 26, 254–263. [Google Scholar] [CrossRef]
- Wang, X.; Roeloffs, V.; Klosowski, J.; Tan, Z.; Voit, D.; Uecker, M.; Frahm, J. Model-based T1 mapping with sparsity constraints using single-shot inversion-recovery radial FLASH. Magn. Reson. Med. 2018, 79, 730–740. [Google Scholar] [CrossRef]
- Huang, C.; Graff, C.; Clarkson, E.; Bilgin, A.; Altbach, M. T2 mapping from highly undersampled data by reconstruction of principal component coefficient maps using compressed sensing. Magn. Reson. Med. 2012, 67, 1355–1366. [Google Scholar] [CrossRef] [Green Version]
- Velikina, J.V.; Alexander, A.L.; Samsonov, A. Accelerating MR parameter mapping using sparsity-promoting regularization in parametric dimension. Magn. Reson. Med. 2013, 70, 1263–1273. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, T.; Pauly, J.; Levesque, I. Accelerating parameter mapping with a locally low rank constraint. Magn. Reson. Med. 2015, 73, 655–661. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, B.; Lu, W.; Hitchens, T.; Lam, F.; Ho, C.; Liang, Z.P. Accelerated MR parameter mapping with low-rank and sparsity constraints. Magn. Reson. Med. 2015, 74, 489–498. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Otazo, R.; Kim, D.; Axel, L.; Sodickson, D.K. Combination of compressed sensing and parallel imaging for highly accelerated first- pass cardiac perfusion MRI. Magn. Reson. Med. 2010, 64, 767–776. [Google Scholar] [CrossRef] [Green Version]
- Feng, L.; Srichai, M.B.; Lim, R.P.; Harrison, A.; King, W.; Adluru, G.; Dibella, E.V.; Sodickson, D.K.; Otazo, R.; Kim, D. Highly accelerated real-time cardiac cine MRI using k-t SPARSE-SENSE. Magn. Reson. Med. 2013, 70, 64–74. [Google Scholar] [CrossRef] [Green Version]
- Feng, L.; Grimm, R.; Block, K.T.; Chandarana, H.; Kim, S.; Xu, J.; Axel, L.; Sodickson, D.K.; Otazo, R. Golden-angle radial sparse parallel MRI: Combination of compressed sensing, parallel imaging, and golden-angle radial sampling for fast and flexible dynamic volumetric MRI. Magn. Reson. Med. 2014, 72, 707–717. [Google Scholar] [CrossRef] [Green Version]
- Zibetti, M.V.W.; Sharafi, A.; Otazo, R.; Regatte, R.R. Accelerating 3D-T1ρ mapping of cartilage using compressed sensing with different sparse and low rank models. Magn. Reson. Med. 2018, 80, 1475–1491. [Google Scholar] [CrossRef]
- Maier, O.; Schoormans, J.; Schloegl, M.; Strijkers, G.J.; Lesch, A.; Benkert, T.; Block, T.; Coolen, B.F.; Bredies, K.; Stollberger, R. Rapid T1 quantification from high resolution 3D data with model-based reconstruction. Magn. Reson. Med. 2019, 81, 2072–2089. [Google Scholar] [CrossRef] [Green Version]
- Hilbert, T.; Schulz, J.; Marques, J.P.; Thiran, J.P.; Krueger, G.; Norris, D.G.; Kober, T. Fast model-based T2 mapping using SAR-reduced simultaneous multislice excitation. Magn. Reson. Med. 2019, 82, 2090–2103. [Google Scholar] [CrossRef] [Green Version]
- Ma, D.; Gulani, V.; Seiberlich, N.; Liu, K.; Sunshine, J.L.; Duerk, J.L.; Griswold, M.A. Magnetic resonance fingerprinting. Nature 2013, 495, 187–192. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Setsompop, K.; Ye, H.; Cauley, S.F.; Wald, L.L. Maximum Likelihood Reconstruction for Magnetic Resonance Fingerprinting. IEEE Trans. Med. Imaging 2016, 35, 1812–1823. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Liu, S.; Huang, M. Low-Rank and Sparse Decomposition Model for Accelerating Dynamic MRI Reconstruction. J. Healthc. Eng. 2017, 9856058. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Voit, D.; Roeloffs, V.; Uecker, M.; Frahm, J. Fast Interleaved Multislice T1 Mapping: Model-Based Reconstruction of Single-Shot Inversion-Recovery Radial FLASH. Comput. Math. Methods Med. 2018, 13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Buehrer, M.; Pruessmann, K.P.; Boesiger, P.; Kozerke, S. Array Compression for MRI with Large Coil Arrays. Magn. Reson. Med. 2007, 57, 1131–1139. [Google Scholar] [CrossRef]
- Data from: Model-based acceleration of Look-Locker T1 mapping. Available online: http://dx.doi10.5061/dryad.165r8 (accessed on 4 December 2019).
- Winkelmann, S.; Schaeffter, T.; Koehler, T.; Eggers, H.; Doessel, O. An optimal radial profile order based on the Golden Ratio for time-resolved MRI. IEEE Trans. Med Imaging 2007, 26, 68–76. [Google Scholar] [CrossRef]
- Seiberlich, N.; Breuer, F.A.; Blaimer, M.; Barkauskas, K.; Jakob, P.M.; Griswold, M. Non-Cartesian data reconstruction using GRAPPA operator gridding (GROG). Magn. Reson. Med. 2007, 58, 1257–1265. [Google Scholar] [CrossRef]
- Seiberlich, N.; Breuer, F.; Blaimer, M.; Jakob, P.; Griswold, M. Self-calibrating GRAPPA operator gridding for radial and spiral trajectories. Magn. Reson. Med. 2008, 59, 930–935. [Google Scholar] [CrossRef]
- Seber, G.A.F.; Wild, C.J. Nonlinear Regression; Wiley-Interscience: Hoboken, NJ, USA, 2003. [Google Scholar]
- DuMouchel, W.H.; O’Brien, F.L. Integrating a Robust Option into a Multiple Regression Computing Environment. In Computing Graphics in Statistics; BBN Software products: Cambridge, MA, USA, 1992; pp. 41–48. [Google Scholar]
- Holland, P.W.; Welsch, R.E. Robust Regression Using Iteratively Reweighted Least-Squares. Commun. Stat. Theory Methods 1977, 6, 813–827. [Google Scholar] [CrossRef]
- Deichmann, R.; Haase, A. Quantification of T1 values by SNAPSHOT-FLASH NMR imaging. J. Magn. Reson. 1969, 96, 608–612. [Google Scholar] [CrossRef]






| REF | IR-MAP | FIR-MAP-MFM | FIR-MAP-IFM | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| WM | GM | CSF | WM | GM | CSF | WM | GM | CSF | WM | GM | CSF | |
| Mean | 712 | 1402 | 3908 | 722 | 1432 | 4351 | 710 | 1407 | 4016 | 720 | 1427 | 4340 |
| Std | 22 | 117 | 555 | 78 | 162 | 651 | 31 | 115 | 469 | 79 | 159 | 602 |
| Mean/Std | 32 | 12 | 7 | 9 | 9 | 7 | 23 | 12 | 9 | 9 | 9 | 7 |
| Number of Each n Projection | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Mean Run Time of Single Iteration (s) | 30 | 17.5 | 13.3 | 10.6 | 9.5 | 9 | 8.3 | 8 |
| FIR-MAP-MFM | FIR-MAP-MFM-2 | FIR-MAP-MFM-6 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| WM | GM | CSF | WM | GM | CSF | WM | GM | CSF | |
| Mean | 710 | 1407 | 4016 | 701 | 1402 | 3959 | 701 | 1370 | 3733 |
| Std | 31 | 115 | 469 | 41 | 115 | 459 | 68 | 128 | 408 |
| Mean/Std | 23 | 12 | 9 | 17 | 12 | 9 | 10 | 11 | 9 |
| FIR-MAP-IFM | FIR-MAP-IFM-2 | FIR-MAP-IFM-6 | |||||||
| WM | GM | CSF | WM | GM | CSF | WM | GM | CSF | |
| Mean | 720 | 1427 | 4340 | 717 | 1426 | 4332 | 710 | 1416 | 4309 |
| Std | 79 | 159 | 602 | 79 | 161 | 597 | 80 | 161 | 589 |
| Mean/Std | 9 | 9 | 7 | 9 | 9 | 7 | 9 | 9 | 7 |
| FIR-MAP-MFM | FIR-MAP-MFM-2 | FIR-MAP-MFM-6 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| WM | GM | CSF | WM | GM | CSF | WM | GM | CSF | |
| Mean | 710 | 1407 | 4016 | 702 | 1405 | 3962 | 703 | 1372 | 3664 |
| Std | 31 | 115 | 469 | 40 | 114 | 464 | 64 | 135 | 424 |
| Mean/Std | 23 | 12 | 9 | 18 | 12 | 9 | 11 | 10 | 9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Staniszewski, M.; Klose, U. Improvement of Fast Model-Based Acceleration of Parameter Look-Locker T1 Mapping. Sensors 2019, 19, 5371. https://doi.org/10.3390/s19245371
Staniszewski M, Klose U. Improvement of Fast Model-Based Acceleration of Parameter Look-Locker T1 Mapping. Sensors. 2019; 19(24):5371. https://doi.org/10.3390/s19245371
Chicago/Turabian StyleStaniszewski, Michał, and Uwe Klose. 2019. "Improvement of Fast Model-Based Acceleration of Parameter Look-Locker T1 Mapping" Sensors 19, no. 24: 5371. https://doi.org/10.3390/s19245371
APA StyleStaniszewski, M., & Klose, U. (2019). Improvement of Fast Model-Based Acceleration of Parameter Look-Locker T1 Mapping. Sensors, 19(24), 5371. https://doi.org/10.3390/s19245371