Extended Target Echo Detection Based on KLD and Wigner Matrices

Abstract
:1. Introduction
- Most of the current research assumes that the target is a “point target” model, but this is only applicable to the situation that the radar range resolution unit is much larger than the geometrical dimension of the target and the target scattering energy is concentrated in one range unit. In practical applications, especially for wideband radar signals, the range resolutions are relatively high, and the target scattering centers are distributed in multiple range units. If the traditional method is still adopted, especially the stealth target’s echo is exceedingly weak. This paper comes up with an echo detection algorithm for this sort of stealthy extended target.
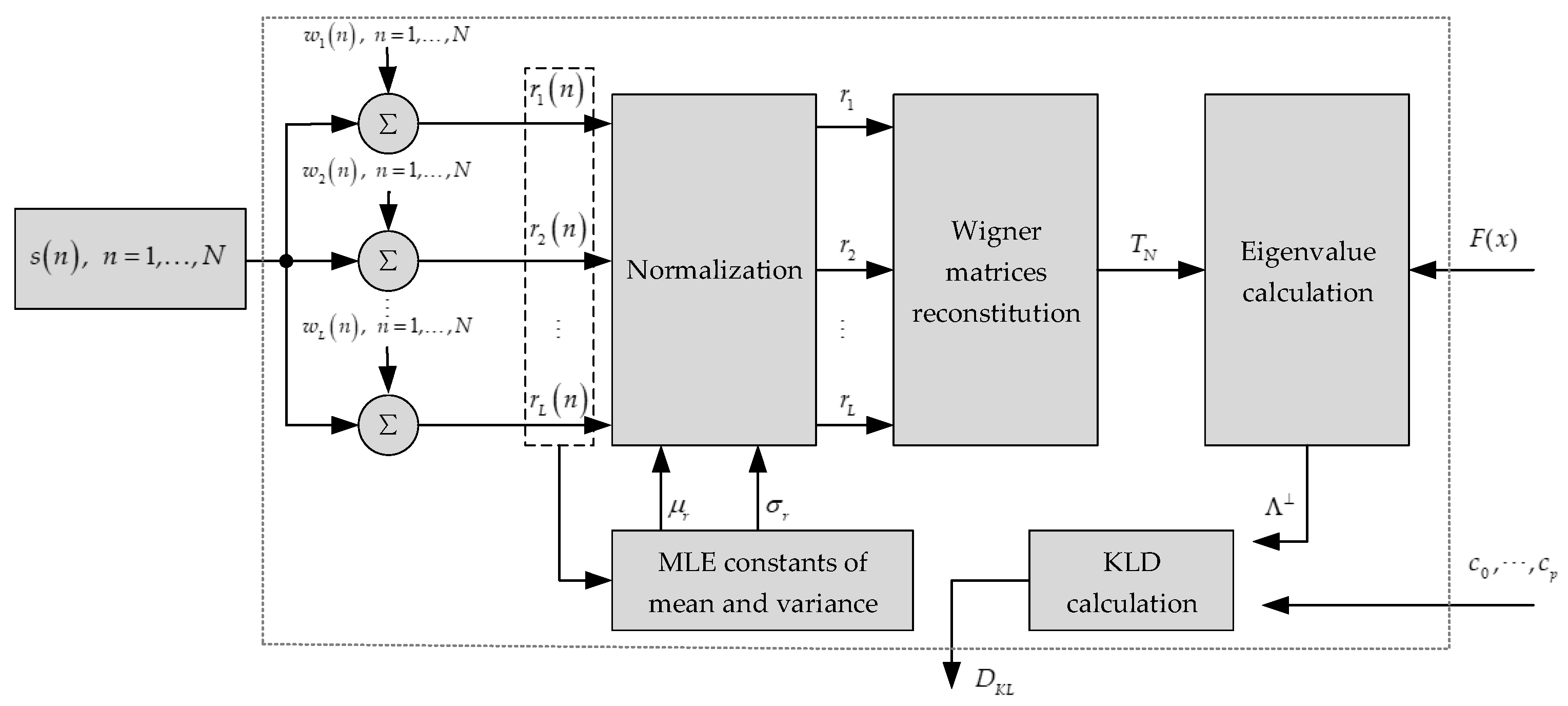
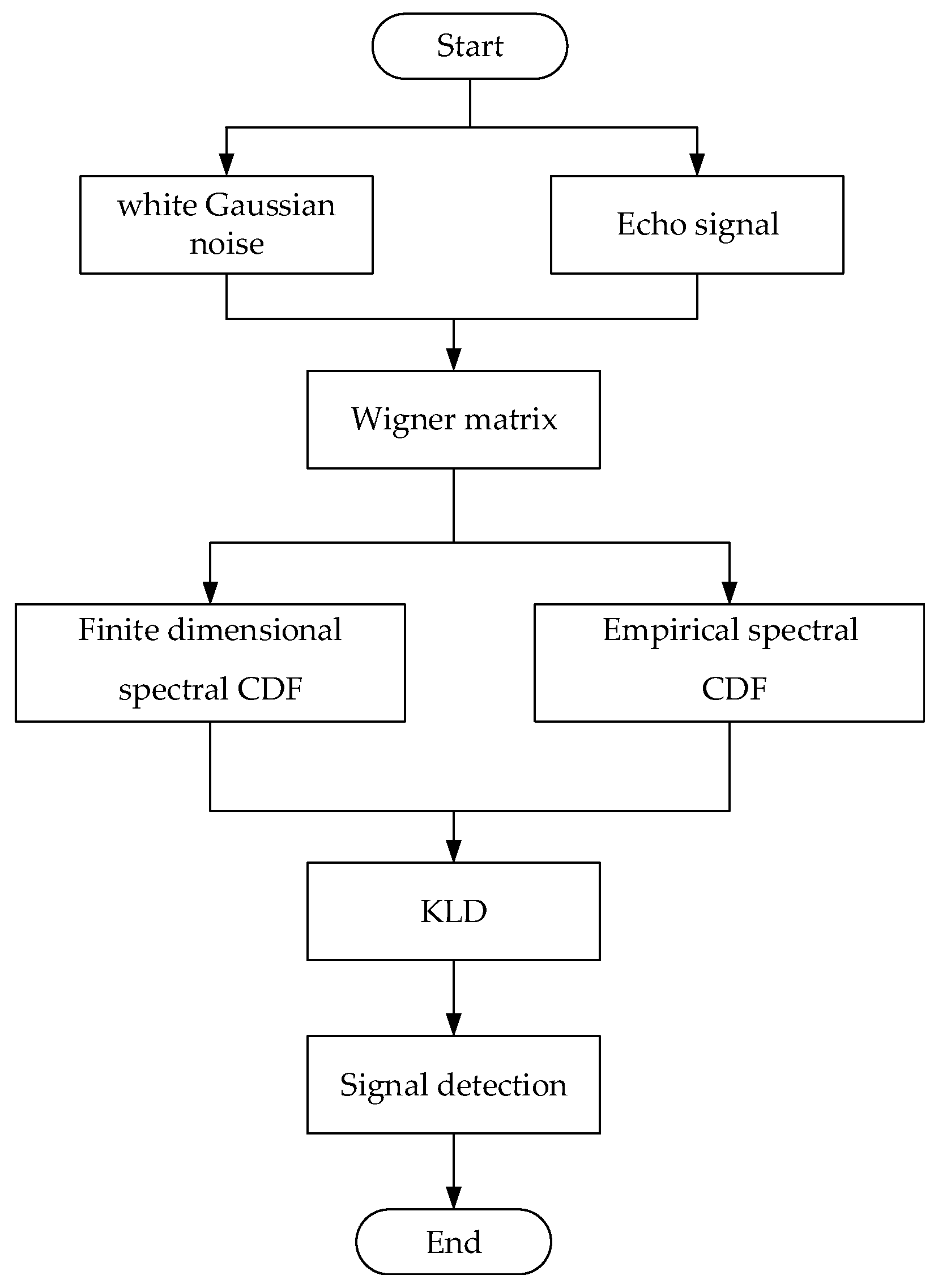
- In this paper, the white Gaussian noise signal sequence in the environment is reconstructed into Wigner matrices, and the spectral distribution of Wigner matrices in finite dimensions is innovatively brought forward as the characteristic of white Gaussian noise. The KLD of the empirical spectral CDF and the finite dimensional spectral CDF of the reconstructed echo signal is calculated and used as the test statistic.
- Numerous studies on target detection are based on the assumption that the echo signal can be sampled sufficiently. However, the sampling frequency of actual radar receiver is limited. In this paper, the probability density function (PDF) and CDF of Wigner matrices are studied for the limited number of samples, and the properties of spectral distribution of Wigner matrices in finite dimensions are rigorously derived.
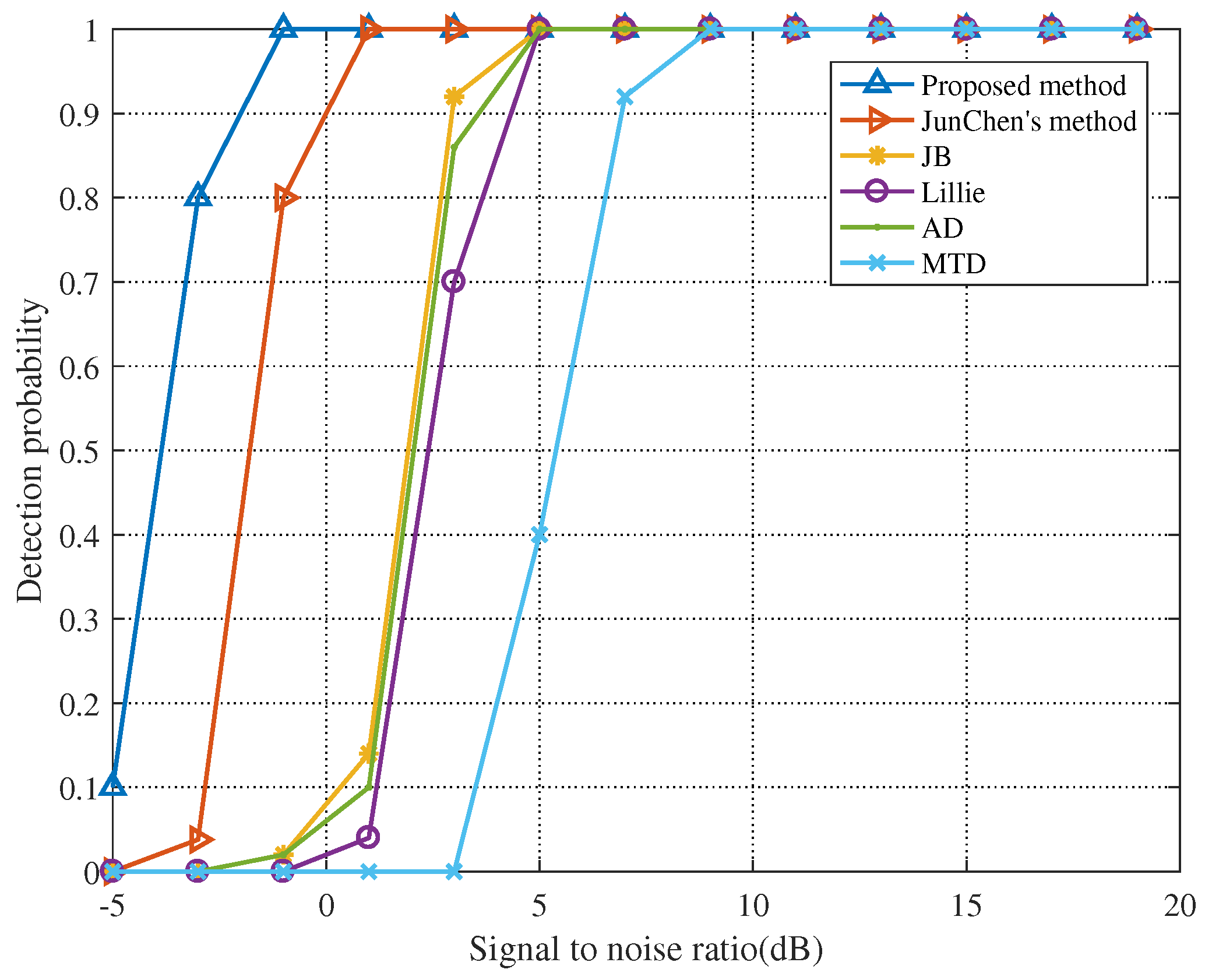
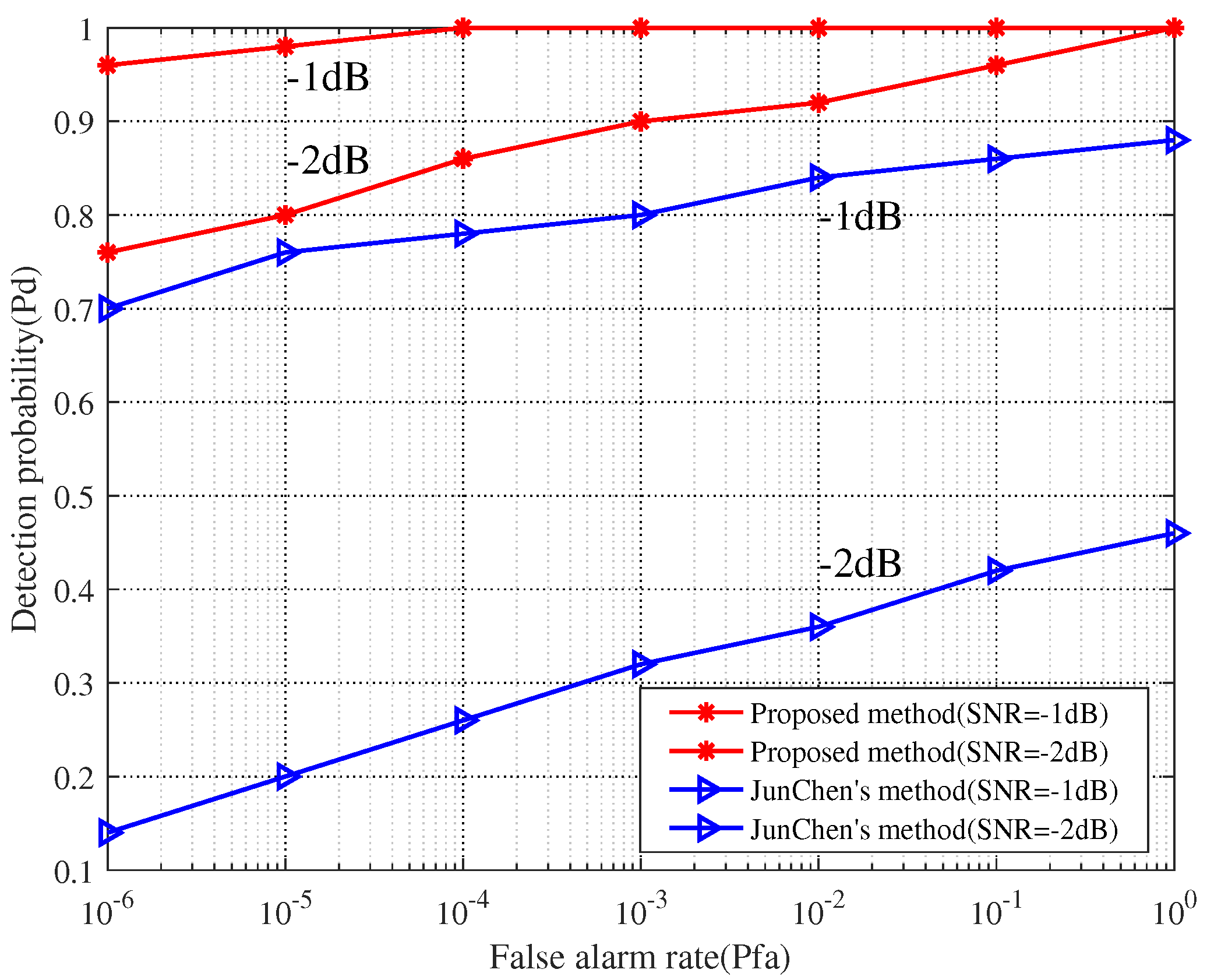
- Numerical results are provided to demonstrate that the proposed algorithm effectively improves the signal detection performance and is suitable for different low probability of intercept (LPI) radar waveforms. The method advocated in this paper can reduce the SNR required for radar target detection and achieve low radiation power control, so as to improve the RFS performance of airborne radar.
2. Application of KLD and Wigner Matrices in Echo Detection
2.1. Application of KLD in Echo Detection
2.2. Application of Wigner Matrices in Echo Detection
3. Description of the Echo Detection Algorithm for Stealth Extended Targets
3.1. Detection Method of Target Echo
3.2. Spectral CDF of Wigner Matrices in Finite Dimension
3.3. Echo Detection of Wideband Radar Signal
4. Numerical Simulations and Performance Analysis
4.1. Comparison of Detection Performance
4.2. Influencing Factors of Detection Performance
5. Conclusions
- Containing abundant information, KLD is taken as the test statistic, whose mean and variance are studied in this paper and whose deeper content needs to be further explored in the future.
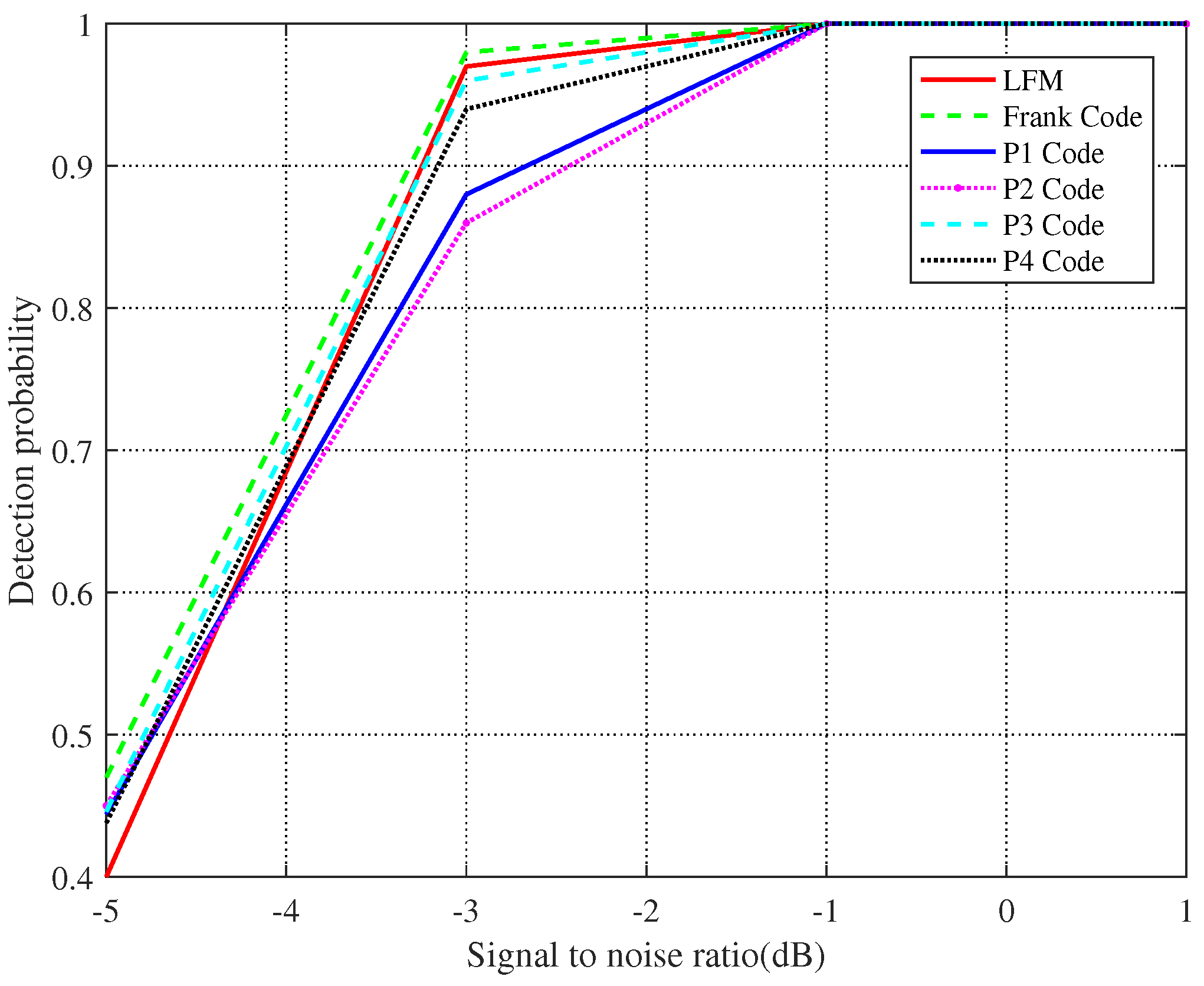
- Figure 6 demonstrates that the proposed method has fabulous target detection performance for common LPI radar waveforms (LFM, Frank, P1, P2, P3, and P4 codes), but for advanced LPI signals, whether the proposed method can still maintain superior detection performance remains to be further studied.
- It is widely believed that finding a balance between observation duration and detection rates is the ultimate goal of the detection of ultra-high-speed targets. Hence, it also might be of interest to devise an effective detection method of ultra-high-speed targets in a short observation time.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, F.; Sellathurai, M.; Liu, W.; Zhou, J. Security information factor based airborne radar RF stealth. J. Syst. Eng. Electron. 2015, 26, 258–266. [Google Scholar] [CrossRef]
- Donatien, S.; Seung, N.; Jin, K.; Ngoc, B. Low-Rank Matrix Recovery Approach for Clutter Rejection in Real-Time IR-UWB Radar-Based Moving Target Detection. Sensors 2016, 16, 1409. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.; Li, X.; Yi, W. Range walk correction and velocity estimation for high-speed target detection. In Proceedings of the 2017 IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 1478–1482. [Google Scholar]
- Tao, R.; Zhang, N.; Wang, Y. Analysing and compensating the effects of range and Doppler frequency migrations in linear frequency modulation pulse compression radar. IET Radar Sonar Navig. 2011, 5, 12–22. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, W.; Wang, Y. Multiple targets’ detection in terms of Keystone transform at the low SNR level. In Proceedings of the 2008 International Conference on Information and Automation, Changsha, China, 20–23 June 2008; pp. 2184–2188. [Google Scholar]
- Scott, K.M.; Barott, W.C.; Himed, B. The keystone transform: Practical limits and extension to second order corrections. In Proceedings of the 2015 IEEE Radar Conference, Arlington, VA, USA, 10–15 May 2015; pp. 1264–1269. [Google Scholar]
- Kong, L.; Li, X.; Cui, G.; Yi, W.; Yang, Y. Coherent Integration Algorithm For A Maneuvering Target with High-Order Range Migratione. IEEE Trans. Signal Process. 2015, 63, 4474–4486. [Google Scholar] [CrossRef]
- Zhang, S.; Zeng, T.; Long, T.; Yuan, H. Dim target detection based on keystone transform. In Proceedings of the 2005 IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 889–894. [Google Scholar]
- Barry, D.T. Fast calculation of the Choi-Williams time-frequency distribution. IEEE Trans. Signal Process. 1992, 40, 450–455. [Google Scholar] [CrossRef]
- Wang, M.; Chan, A.K.; Chui, C.K. Linear frequency-modulated signal detection using Radon-ambiguity transform. IEEE Trans. Signal Process. 1998, 46, 571–586. [Google Scholar] [CrossRef]
- Barbarossa, S. Analysis of multicomponent LFM signals by a combined Wigner-Hough transform. IEEE Trans. Signal Process. 1995, 43, 1511–1515. [Google Scholar] [CrossRef]
- Joaquim, S. Non-Parametric Tests of Hypotheses. In Applied Statistics Using SPSS, STATISTICA and MATLAB, 2nd ed.; Joaquim, P., Roberto, F., Eds.; Springer: Berlin, Germany, 2007; pp. 172–188. [Google Scholar]
- Karbasi, S.M.; Aubry, A.; De Maio, A. Robust Transmit Code and Receive Filter Design for Extended Targets in Clutter. IEEE Trans. Signal Process. 2015, 63, 1965–1996. [Google Scholar] [CrossRef]
- Cheng, X.; Aubry, A.; Ciuonzo, D.; De Maio, A.; Wang, X. Robust Waveform and Filter Bank Design of Polarimetric Radar. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 370–384. [Google Scholar] [CrossRef]
- Ciuonzo, D.; De Maio, A.; Orlando, D. A Unifying Framework for Adaptive Radar Detection in Homogeneous Plus Structured Interference—Part II: Detectors Design. IEEE Trans. Signal Process. 2016, 64, 2907–2919. [Google Scholar] [CrossRef] [Green Version]
- Conte, E.; De Maio, A.; Ricci, G. GLRT-based adaptive detection algorithms for range-spread targets. IEEE Trans. Signal Process. 2001, 49, 1336–1348. [Google Scholar] [CrossRef]
- Dai, F.; Liu, H.; Shui, P.; Wu, S. Adaptive Detection of Wideband Radar Range Spread Targets with Range Walking in Clutter. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2052–2064. [Google Scholar] [CrossRef]
- Ciuonzo, D. On Time-Reversal Imaging by Statistical Testing. IEEE Signal Process. Lett. 2017, 24, 1024–1028. [Google Scholar] [CrossRef] [Green Version]
- Shannon, C.E. A mathematical theory of communication. Bell Labs Tech. J. 1948, 27, 623–656. [Google Scholar] [CrossRef]
- Bell, M.R. Information theory and radar waveform design. IEEE Trans. Inf. Theory 1993, 39, 1578–1597. [Google Scholar] [CrossRef] [Green Version]
- Kullback, S.; Leibler, R.A. On Information and Sufficiency. Ann. Math. Statist. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Shao, H.; Miao, L.; Gao, W.; Shen, J. Ensemble Particle Filter Based on KLD and Its Application to Initial Alignment of the SINS in Large Misalignment Angles. IEEE Trans. Ind. Electron. 2018, 65, 8946–8955. [Google Scholar] [CrossRef]
- Chen, J.; Wang, F.; Zhou, J. Wigner-Matrix-Based Normality Test and Application to Weak Signal Detection in SISO/SIMO Systems. Chin. Phys. Lett. 2016, 33, 5–8. [Google Scholar] [CrossRef]
- Chen, J.; Wang, F.; Zhou, J. On Short-Time Velocity Identification and Coherent-Like Detection of Ultrahigh Speed Targets. IEEE Trans. Signal Process. 2018, 66, 4811–4825. [Google Scholar] [CrossRef]
- Couillet, R.; Debbah, M. Random matrices. In Random Matrix Methods for Wireless Communications, 1st ed.; Cambridge University Press: London, UK, 2011; pp. 17–30. [Google Scholar]
- Bai, Z.; Silverstein, J.W. Wigner Matrices and Semicircular Law. In Spectral Analysis of Large Dimensional Random Matrices, 2nd ed.; Springer: Berlin, Germany, 2010; pp. 15–38. [Google Scholar]
- Mehta, M.L.; Gaudin, M. On the density of Eigenvalues of a random matrix. Nucl. Phys. 1960, 18, 420–427. [Google Scholar] [CrossRef]
- Machiwal, D.; Jha, M.K. Methods for Testing Normality of Hydrologic Time Series. In Hydrologic Time Series Analysis: Theory and Practice, 2nd ed.; Springer: New Delhi, India, 2012; pp. 32–50. [Google Scholar]
- Yousif, E.; Ratnarajah, T.; Sellathurai, M. A Frequency Domain Approach to Eigenvalue-Based Detection with Diversity Reception and Spectrum Estimation. IEEE Trans. Signal Process. 2016, 64, 35–47. [Google Scholar] [CrossRef]
- Chen, J.; Wang, F.; Zhou, J. Information content based optimal radar waveform design: LPI’s purpose. Entropy 2017, 19, 2039–2056. [Google Scholar] [CrossRef] [Green Version]
- Dunn, W.L.; Shultis, J.K. The Basis of Monte Carlo. In Exploring Monte Carlo Methods, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2012; pp. 21–46. [Google Scholar]
- Kretschmer, F.F.; Lewis, B.L. Doppler Properties of Polyphase Coded Pulse Compression Waveforms. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 521–531. [Google Scholar] [CrossRef]
- Shen, M.; Wang, J.; Wu, D.; Zhu, D. An Efficient Moving Target Detection Algorithm Based on Sparsity-Aware Spectrum Estimation. Sensors 2014, 14, 17055–17067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Wang, F.; Zhou, J. The metrication of LPI radar waveforms based on the asymptotic spectral distribution of wigner matrices. In Proceedings of the 2015 IEEE International Symposium on Information Theory, Hong Kong, China, 14–19 June 2015; pp. 331–335. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | (GHz) | ||||
|---|---|---|---|---|---|
| 0.5 | 1 | 2 | 3 | 4.8 | |
| Proposed method | 0 | 0.64 | 0.9 | 1 | 1 |
| Jun Chen’s method | 0 | 0.24 | 0.88 | 1 | 1 |
| JB | 0 | 0 | 0.23 | 0.94 | 1 |
| Lillie | 0 | 0 | 0 | 0.66 | 1 |
| AD | 0 | 0 | 0.03 | 0.92 | 1 |
| MTD | 0 | 0 | 0 | 0 | 0.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, D.; Wang, F.; Chen, J. Extended Target Echo Detection Based on KLD and Wigner Matrices. Sensors 2019, 19, 5385. https://doi.org/10.3390/s19245385
Xie D, Wang F, Chen J. Extended Target Echo Detection Based on KLD and Wigner Matrices. Sensors. 2019; 19(24):5385. https://doi.org/10.3390/s19245385
Chicago/Turabian StyleXie, Dingsu, Fei Wang, and Jun Chen. 2019. "Extended Target Echo Detection Based on KLD and Wigner Matrices" Sensors 19, no. 24: 5385. https://doi.org/10.3390/s19245385
APA StyleXie, D., Wang, F., & Chen, J. (2019). Extended Target Echo Detection Based on KLD and Wigner Matrices. Sensors, 19(24), 5385. https://doi.org/10.3390/s19245385