Wireless Sensor Network Combined with Cloud Computing for Air Quality Monitoring




Abstract
:1. Introduction
2. Materials and Methods
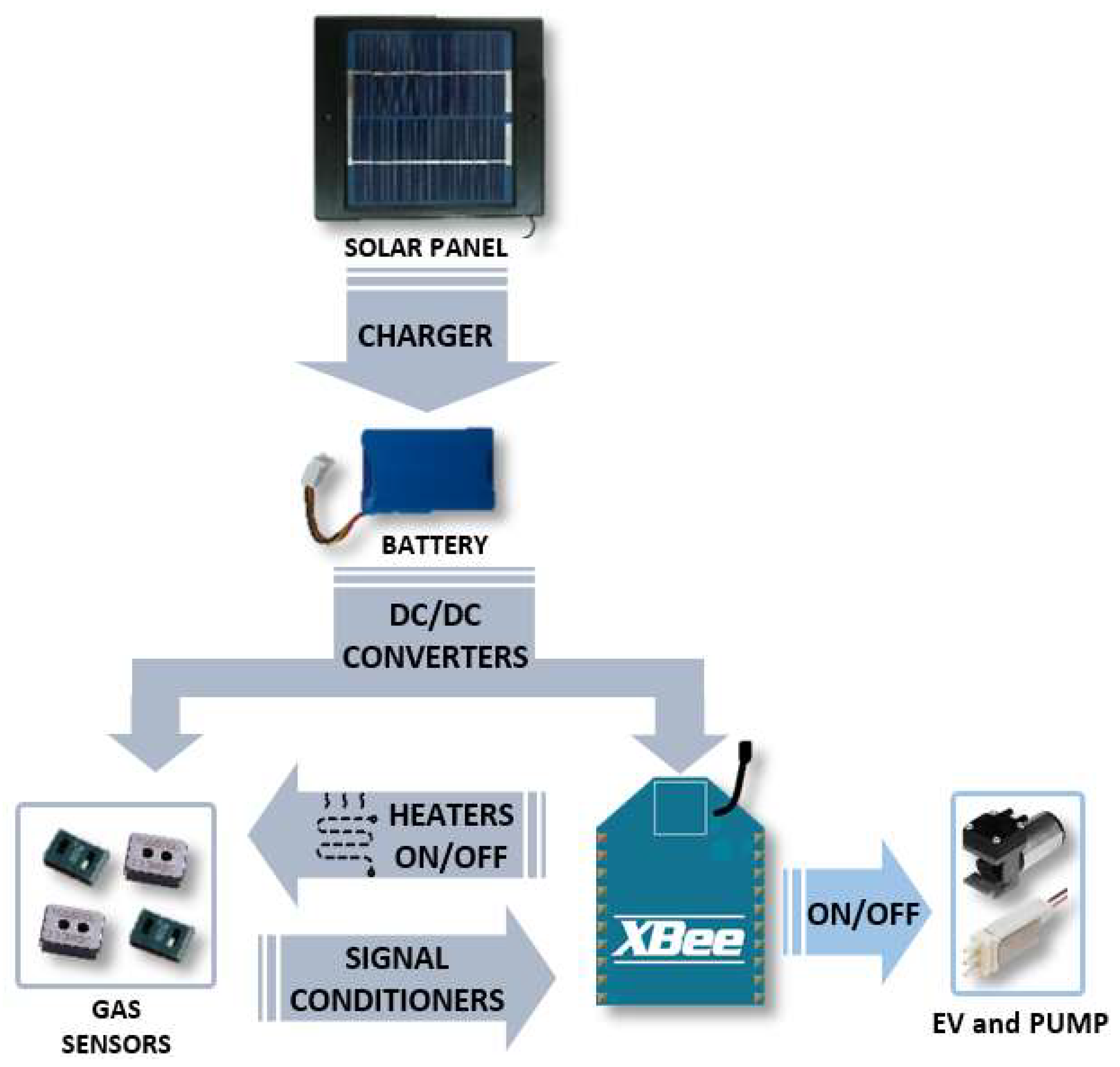
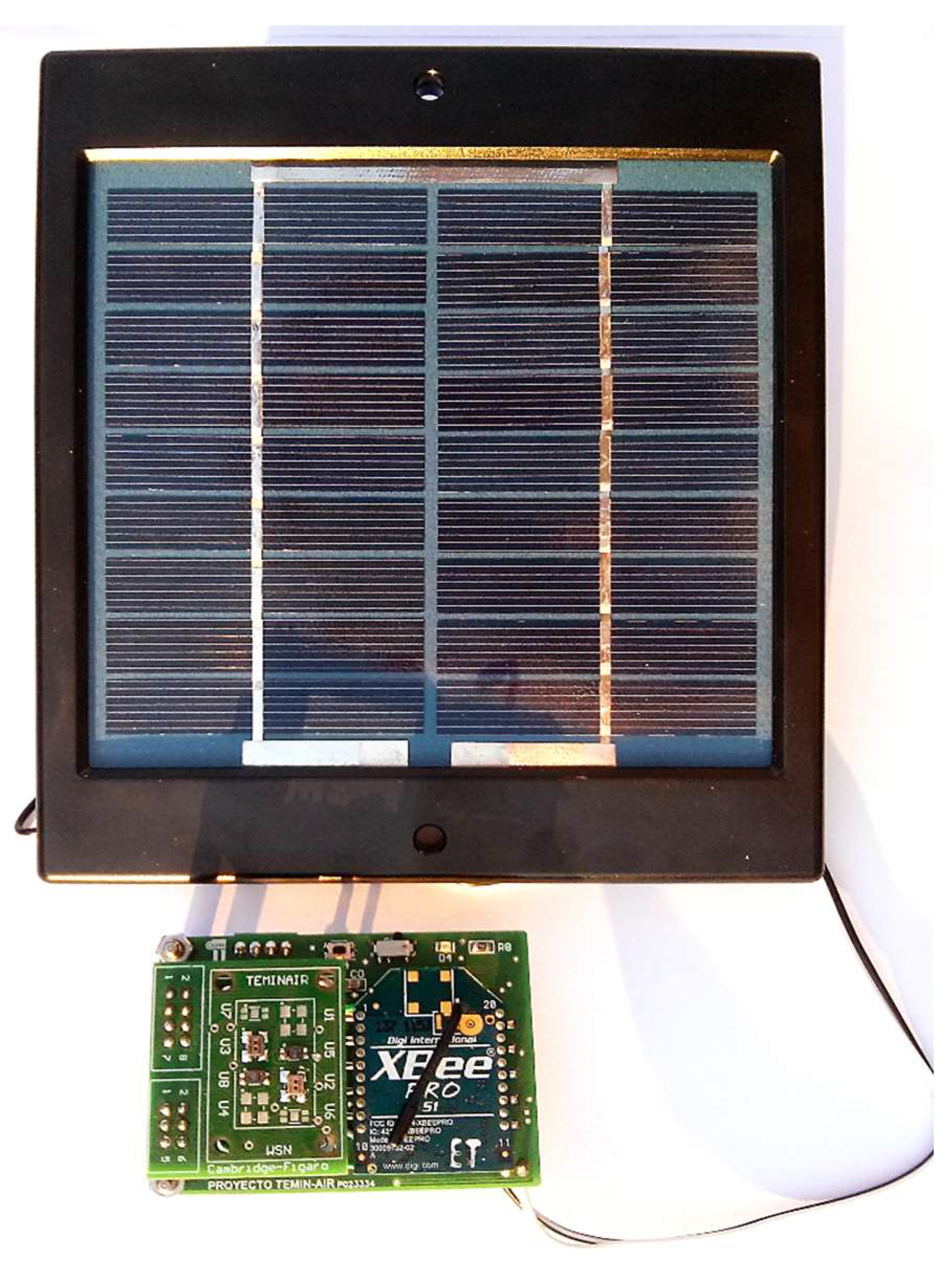
2.1. Description of Sensor Nodes
- Ability to connect a solar panel to achieve greater autonomy in field applications (7.59 h to months).
- Setting up the heating power of the sensors through the XBee module.
- Controllability of the pump power and electrovalve state for laboratory applications.
- Ability to use any other type of resistive sensor.
- Low dimensions (60 × 40 mm).
- Low current consumption (104 to 270 mA) at low voltages.
- Low cost (<~100 €).
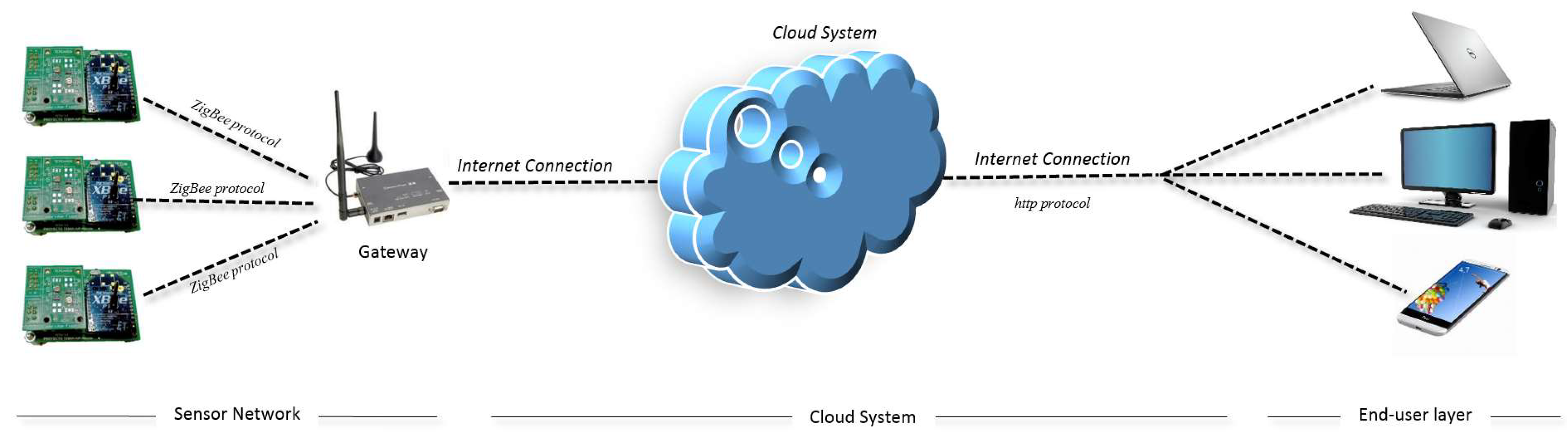
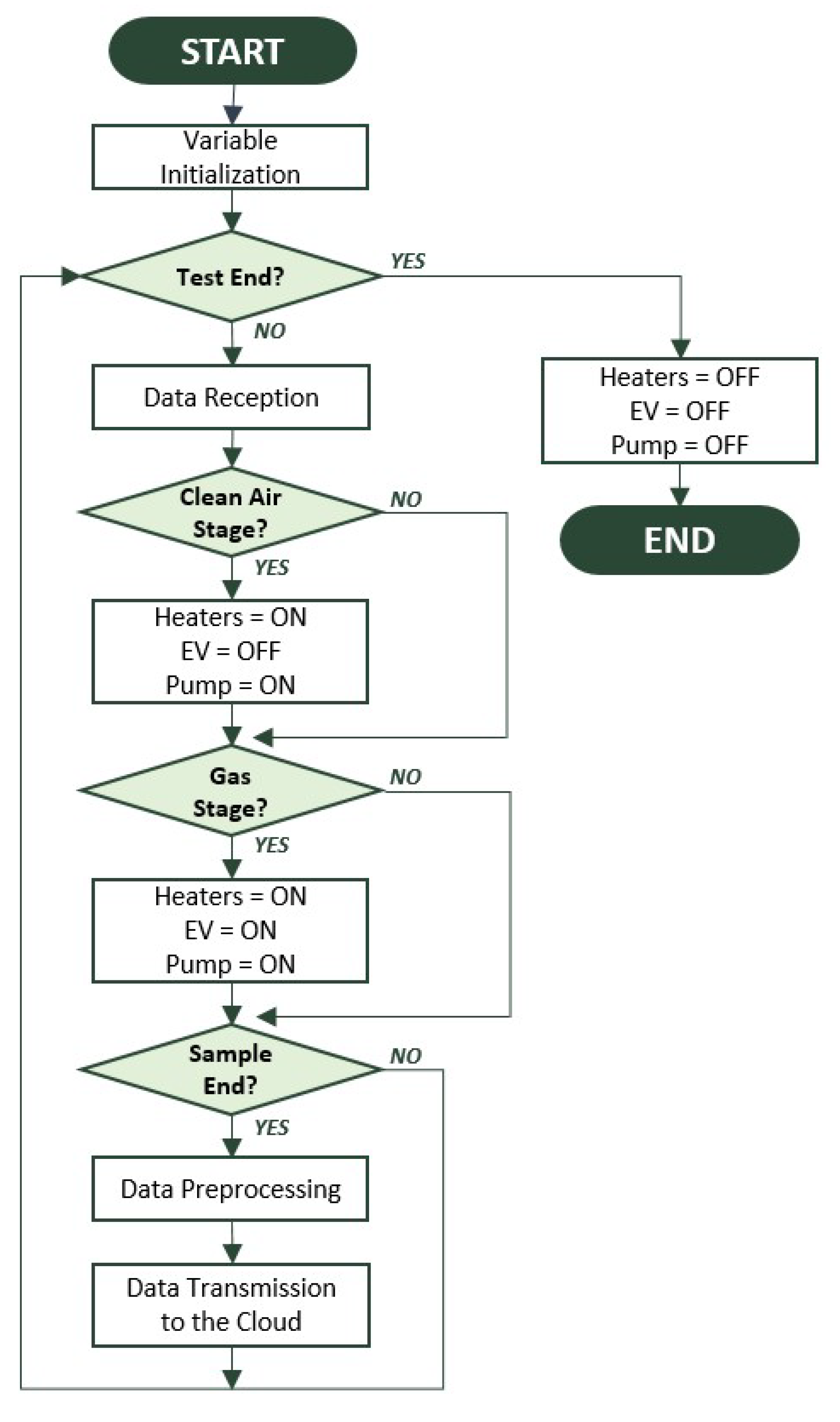
2.2. Description of Gateway Operation and Data Processing
2.3. Description of Cloud System and End-User Layer
- Storage services: While data are flooding the cloud from a wireless sensor network, it is mandatory to store the information in a persistent location. To this end, the following storage services have been implemented: a) create service provides the necessary actions to create new databases for data storing, b) connection service matches a sensor network to a specific database, c) save service stores a data sensor network in a concrete database, and d) retrieve service requests data from the database and returns the extracted information.
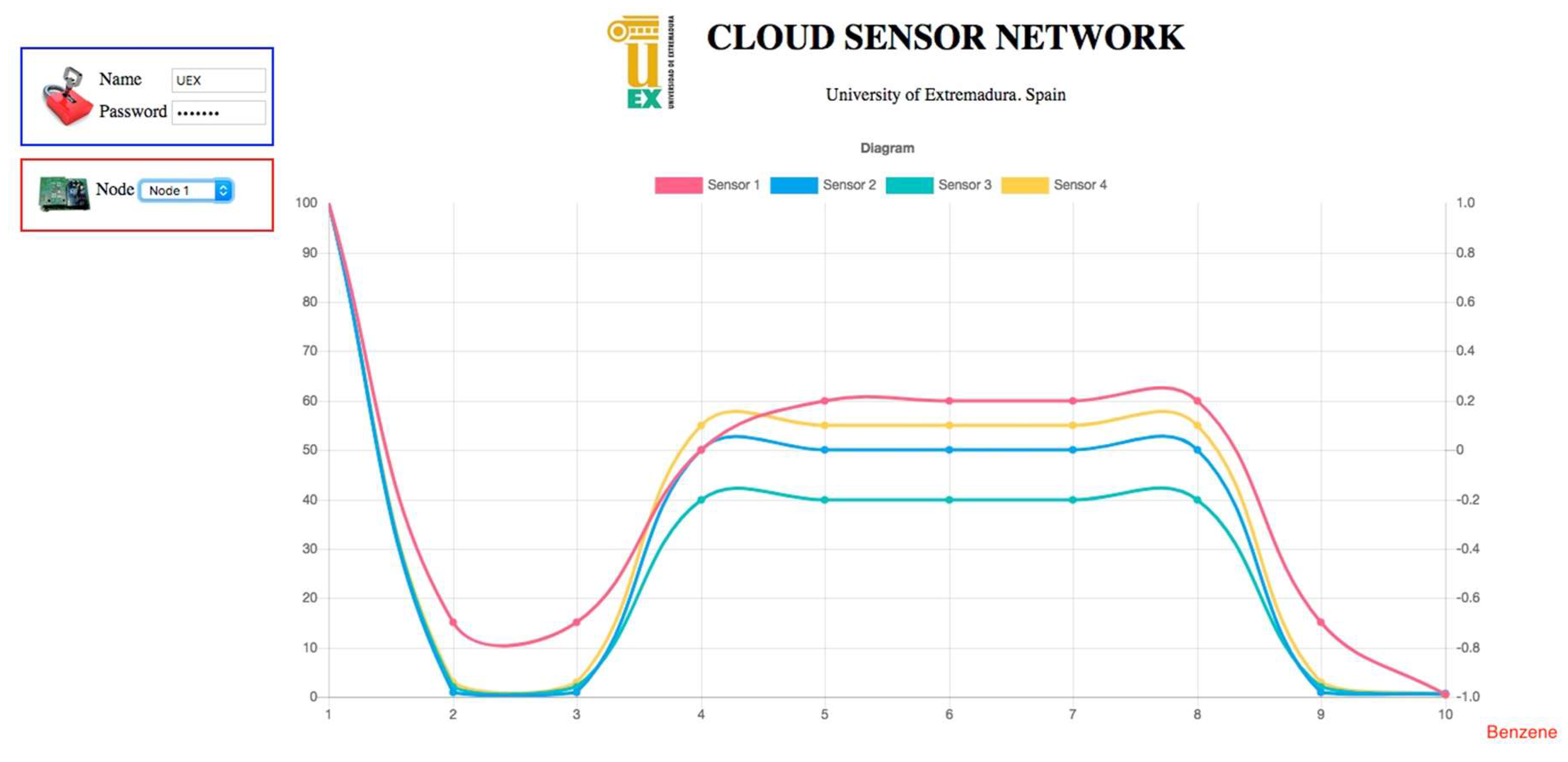
- End-user services: These types of services are focused on providing end-user data access. In this sense, the request identification service opens a user session to allow data access. Otherwise, the data visualization service returns requested data and metadata to present the information graphically. In this proposal, services are not developed independently, since some of them may require other services to provide full functionality. In this regard, the core layer interconnects services to achieve a specific action. For example, the data visualization service is supported by the retrieve service to extract the information from the database.
- Sensor data services: These are focused on checking the information retrieved from sensor networks (check service). This service also adds new metadata to extend the knowledge of each measurement. For example, when sensor data are received, the service also adds timestamp information and classification values, if they are required.
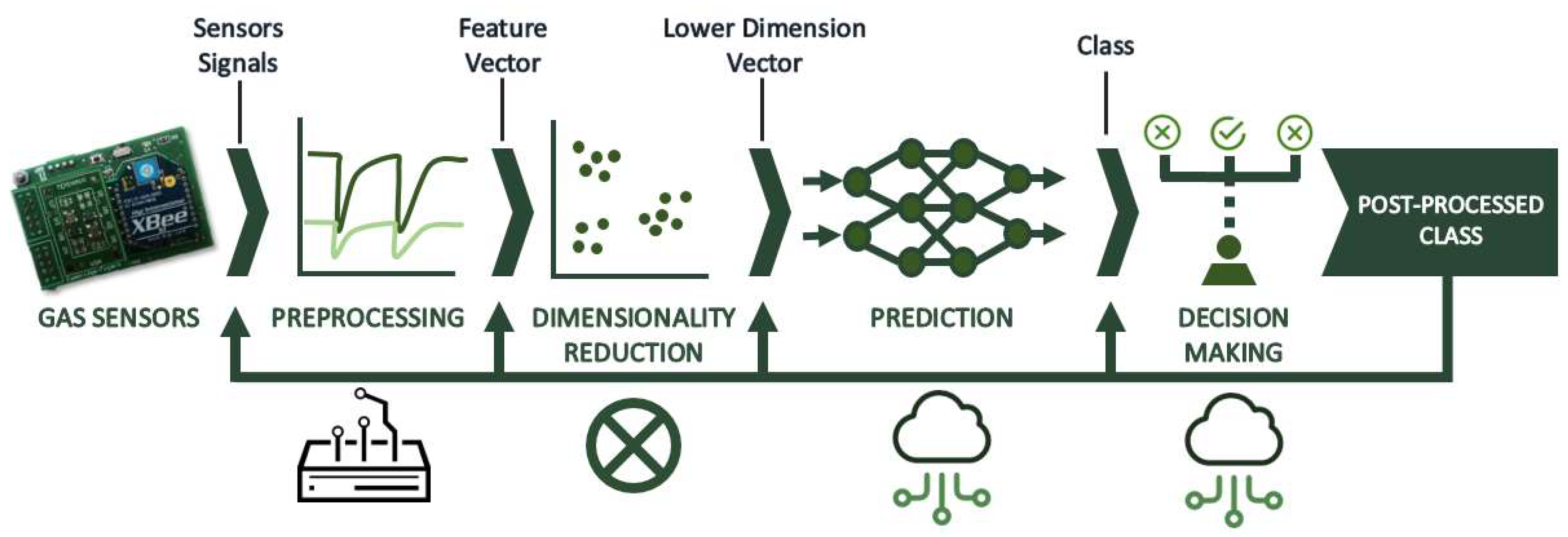
- E-learning services: These support mechanisms classify sensor data through applying e-learning mechanisms (neuronal networks). Create service builds a new neuronal network according to several setup values, while the training service allows a neuronal network to learn from an initial dataset. Finally, request service classifies new sensor network values.
- Security services: Security is one of the main problems in cloud-based systems, since services can be available from everywhere. To allow only authorized users to access cloud services, some additional services have been integrated in the proposed cloud system. The access checking service verifies if a request is authorized to access the cloud, while the user management service allows cloud administrators to manage users and assign privileges.
3. Discussion and Results
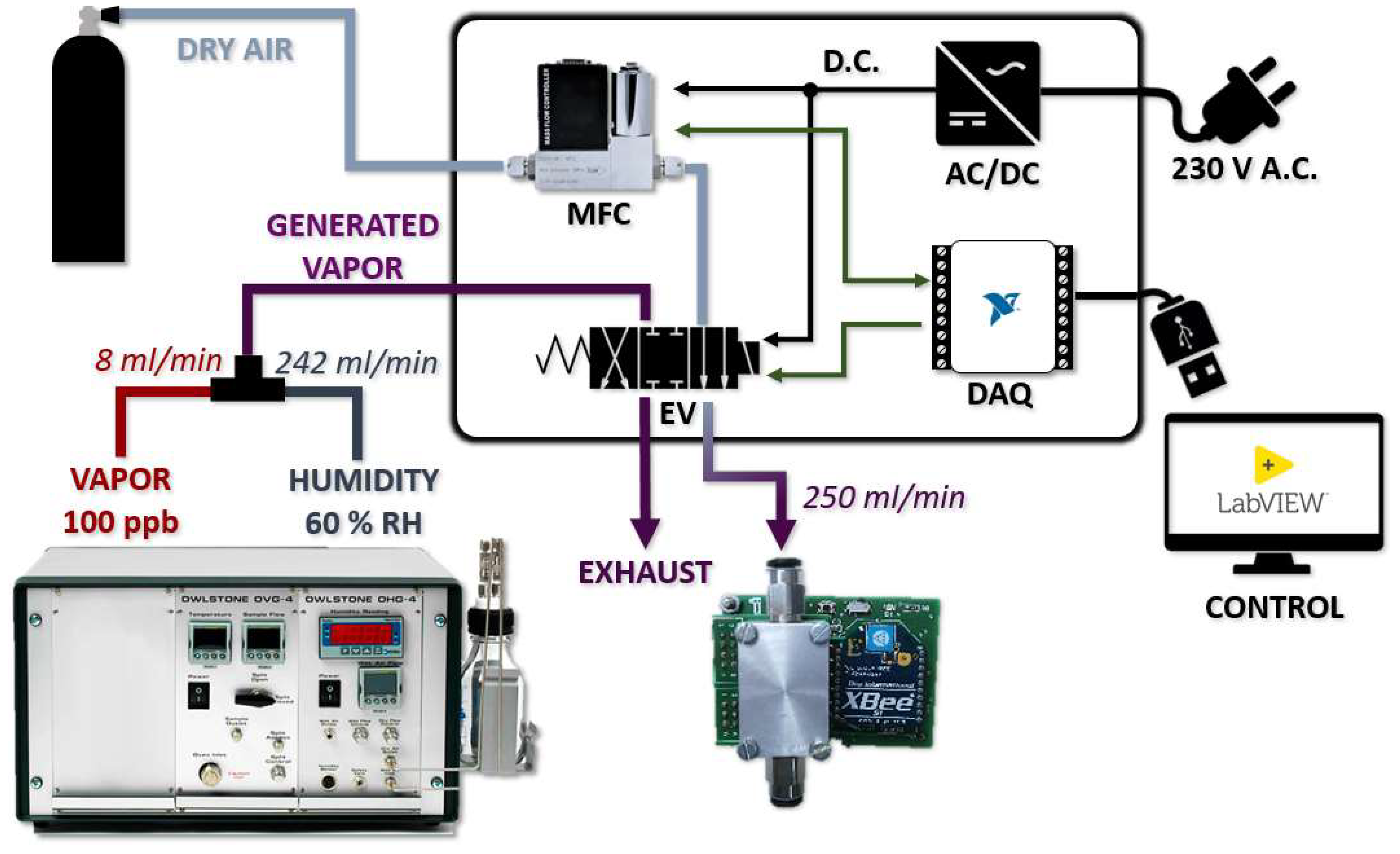
3.1. Measurement Setup
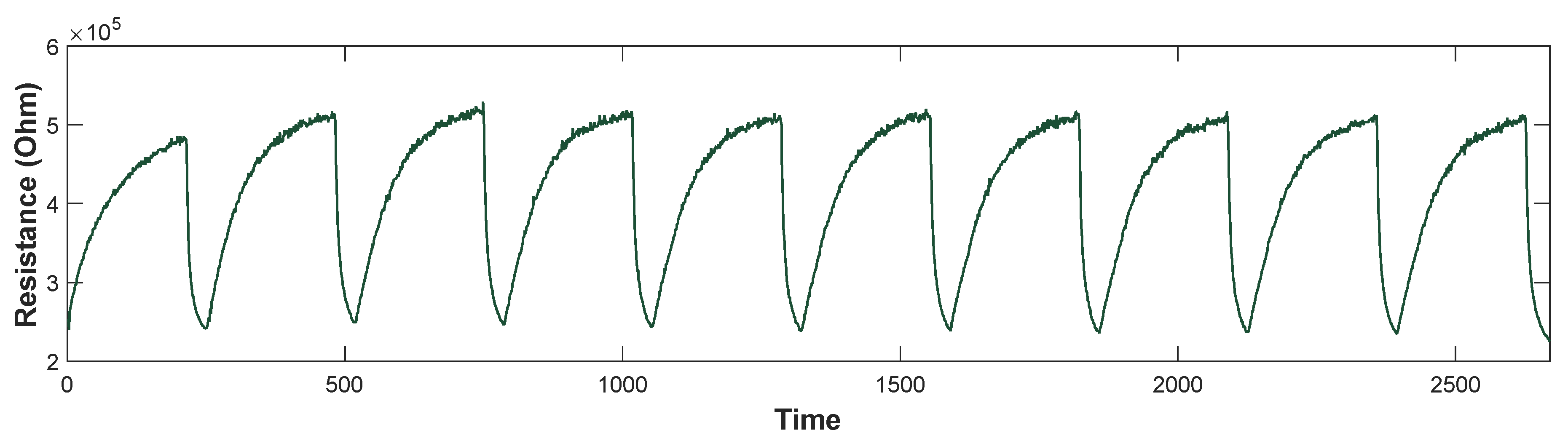
3.2. Results
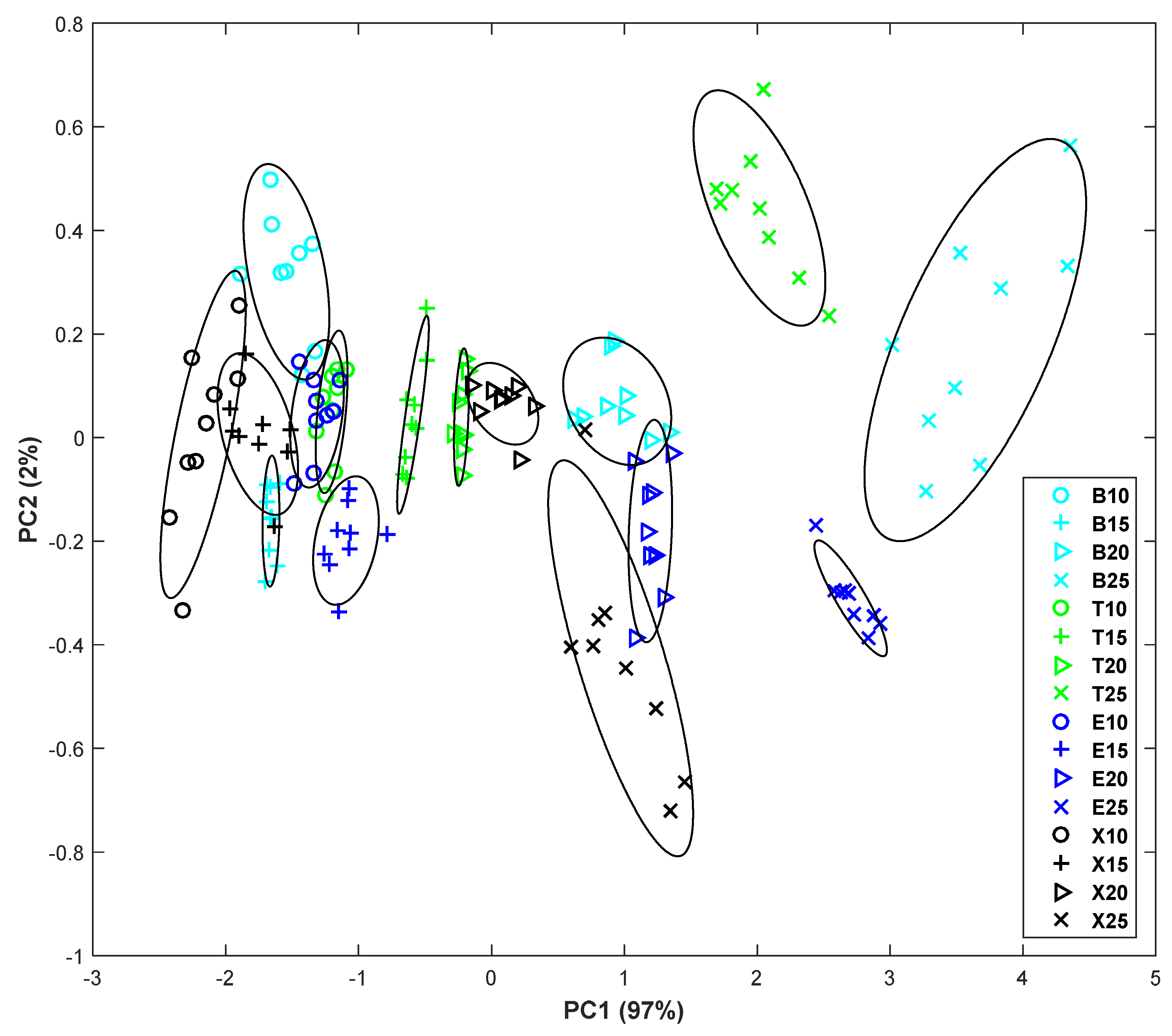
3.2.1. Compound Discrimination
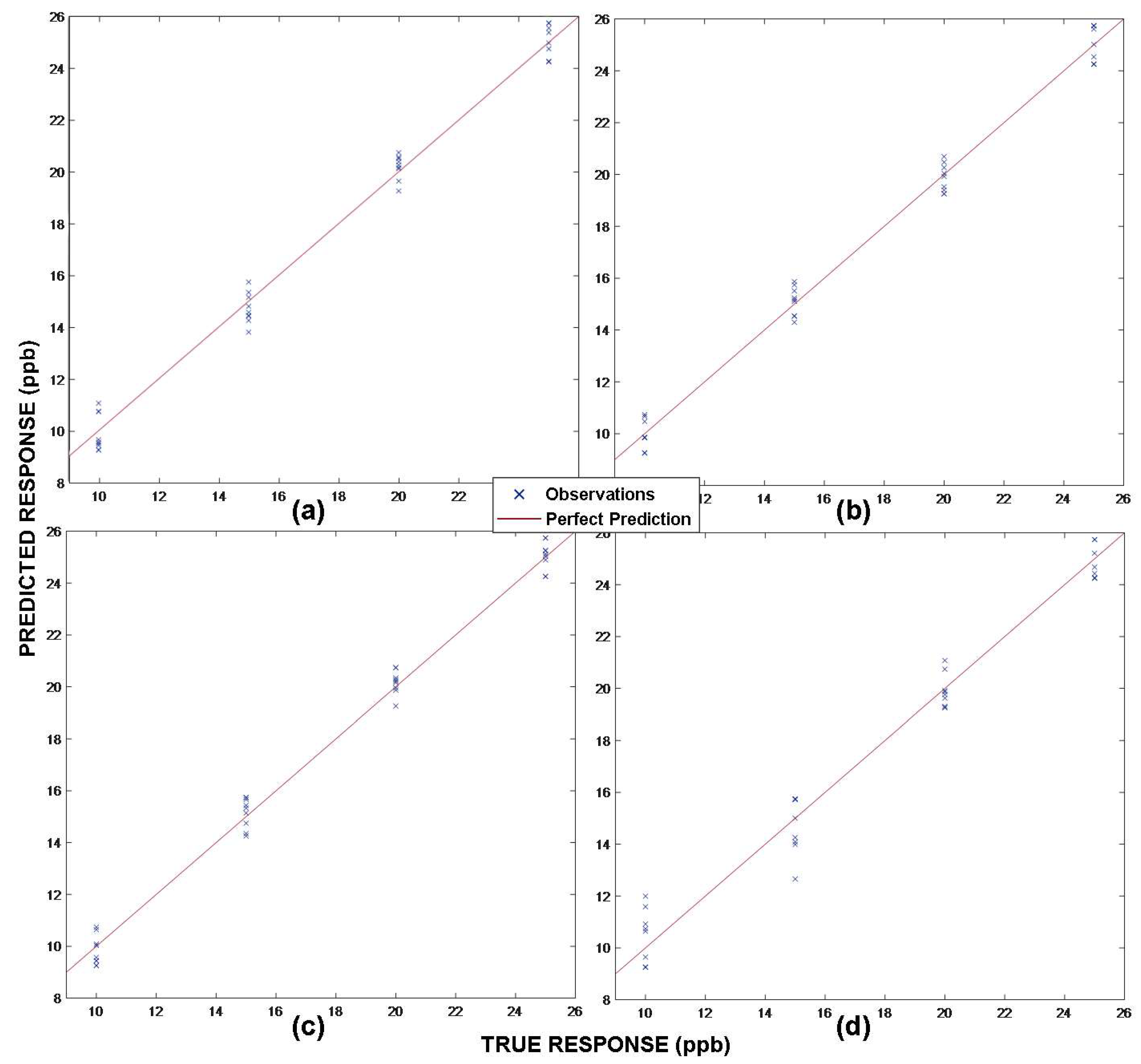
3.2.2. Prediction of Compound Concentration
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Balakrishnan, K.; Brauer, M.; Chen, G.; Chow, J. To Humans Outdoor Air Pollution; International Agency for Research on Cancer: Lyon, France, 2015; ISBN 9789283201755. [Google Scholar]
- Landrigan, P.J.; Fuller, R.; R Acosta, N.J.; Adeyi, O.; Arnold, R.; Basu, N.; Bibi Baldé, A.; Bertollini, R.; Bose-O, S.; Ivey Boufford, J.; et al. The Lancet Commissions The Lancet Commission on pollution and health. Lancet 2018, 391, 462–512. [Google Scholar] [CrossRef]
- Poli, D.; Andreoli, R.; Mutti, A.; Alexopoulos, E.C.; Bakeas, E.B.; Goldoni, M. Benzene: Environmental Exposure. Ref. Modul. Earth Syst. Environ. Sci. 2016. [Google Scholar] [CrossRef]
- Chauhan, S.K.; Saini, N.; Yadav, V.B.; Division, E.S.; Delhi, N. Recent Trends of Volatile Organic Compounds in Ambient Air & Its Health Impacts: A Review. Int. J. Technol. Res. Eng. 2014, 1, 667–678. [Google Scholar]
- Dehghani, M.; Fazlzadeh, M.; Sorooshian, A.; Tabatabaee, H.R.; Miri, M.; Baghani, A.N.; Delikhoon, M.; Mahvi, A.H.; Rashidi, M. Characteristics and health effects of BTEX in a hot spot for urban pollution. Ecotoxicol. Environ. Saf. 2018, 155, 133–143. [Google Scholar] [CrossRef] [PubMed]
- European Parliament and Council of the European Union. DIRECTIVE 2000/69/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 16 November 2000 relating to limit values for benzene and carbon monoxide in ambient air. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32000L0069 (accessed on 1 February 2019).
- Lung, C.; Jones, R.; Zellweger, C.; Karppinen, A.; Penza, M.; Dye, T.; Hüglin, C.; Ning, Z.; Leigh, R.; Hagan, D.; et al. Low-cost sensors for the measurement of atmospheric composition: Overview of topic and future applications (WMO); Lewis, A.C., Von Schneidemesser, E., Peltier, R., Eds.; World Meteorological Organization: Geneva, Switzerland, 2018; ISBN 9789263112156. [Google Scholar]
- McKercher, G.R.; Salmond, J.A.; Vanos, J.K. Characteristics and applications of small, portable gaseous air pollution monitors. Environ. Pollut. 2017, 223, 102–110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- SmartCitizen Smart Citizen Documentation. Available online: https://docs.smartcitizen.me/ (accessed on 22 April 2018).
- Unitec Sens-it Datasheet. Available online: http://www.unitec-srl.com (accessed on 22 April 2018).
- Magnasci_SRL uRADMonitor A3 Datasheet. Available online: https://www.uradmonitor.com (accessed on 22 April 2018).
- Magnasci_SRL uRADMonitor INDUSTRIAL Datasheet. Available online: https://www.uradmonitor.com (accessed on 22 April 2018).
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Networks 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Sousan, S.; Koehler, K.; Hallett, L.; Peters, T.M. Evaluation of the Alphasense optical particle counter (OPC-N2) and the Grimm portable aerosol spectrometer (PAS-1.108). Aerosol Sci. Technol. 2016, 50. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, C.L.; Zhang, Y.; Sonkusale, S.R.; Wang, M.L.; Dokmeci, M.R. SWNT based nanosensors for wireless detection of explosives and chemical warfare agents. IEEE Sens. J. 2013, 13, 202–210. [Google Scholar] [CrossRef]
- Liu, Y.; Hu, L.; Yang, D.; Liu, H. Air-Sense: Indoor environment monitoring evaluation system based on ZigBee network. IOP Conf. Ser. Earth Environ. Sci. 2017, 81, 12208. [Google Scholar]
- Yang, J.; Zhou, J.; Lv, Z.; Wei, W.; Song, H. A Real-Time Monitoring System of Industry Carbon Monoxide Based on Wireless Sensor Networks. Sensors 2015, 15, 29535–29546. [Google Scholar] [CrossRef] [Green Version]
- Botta, A.; de Donato, W.; Persico, V.; Pescapé, A. Integration of Cloud computing and Internet of Things: A survey. Futur. Gener. Comput. Syst. 2016, 56, 684–700. [Google Scholar] [CrossRef]
- Díaz, M.; Martín, C.; Rubio, B. State-of-the-art, challenges, and open issues in the integration of Internet of things and cloud computing. J. Netw. Comput. Appl. 2016, 67, 99–117. [Google Scholar] [CrossRef]
- Kumar, P.M.; Lokesh, S.; Varatharajan, R.; Gokulnath, C.; Parthasarathy, P. Cloud and IoT based disease prediction and diagnosis system for healthcare using Fuzzy neural classifier. Futur. Gener. Comput. Syst. 2018. [Google Scholar] [CrossRef]
- Gachet, D.; De Buenaga, M.; Aparicio, F.; Padron, V. Integrating internet of things and cloud computing for health services provisioning: The virtual cloud carer project. In Proceedings of the 2012 Sixth International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing, Palermo, Italy, 4–6 July 2012; pp. 918–921. [Google Scholar]
- Eirinaki, M.; Dhar, S.; Mathur, S.; Kaley, A.; Patel, A.; Joshi, A.; Shah, D. A building permit system for smart cities: A cloud-based framework. Comput. Environ. Urban Syst. 2018. [Google Scholar] [CrossRef]
- Trilles, S.; Calia, A.; Belmonte, Ó.; Torres-Sospedra, J.; Montoliu, R.; Huerta, J. Deployment of an open sensorized platform in a smart city context. Futur. Gener. Comput. Syst. 2017, 76, 221–233. [Google Scholar] [CrossRef]
- Corbellini, S.; Di Francia, E.; Grassini, S.; Iannucci, L.; Lombardo, L.; Parvis, M. Cloud based sensor network for environmental monitoring. Measurement 2017, 118, 354–361. [Google Scholar] [CrossRef]
- Yang, C.-T.; Chen, S.-T.; Den, W.; Wang, Y.-T.; Kristiani, E. Implementation of an Intelligent Indoor Environmental Monitoring and management system in cloud. Gener. Comput. Syst. 2018. In Press. Available online: https://www.sciencedirect.com/science/article/pii/S0167739X18304187 (accessed on 9 March 2018). [CrossRef]
- Lazarescu, M.T. Design of a WSN platform for long-term environmental monitoring for IoT applications. IEEE J. Emerg. Sel. Top. Circuits Syst. 2013, 3, 45–54. [Google Scholar] [CrossRef]
- Ray, P.P. A survey of IoT cloud platforms. Futur. Comput. Informat. J. 2016, 1, 35–46. [Google Scholar] [CrossRef]
- OpenIoT Web Page. Available online: http://www.openiot.eu/ (accessed on 31 January 2019).
- xively Web Page. Available online: https://xively.com/ (accessed on 31 January 2019).
- ThingSpeak Web Page. Available online: https://thingspeak.com/ (accessed on 31 January 2019).
- CloudPlugs Web Page. Available online: https://cloudplugs.com/ (accessed on 31 January 2019).
- Device Cloud Web Page. Available online: https://devicecloud.digi.com (accessed on 31 January 2019).
- Thinking Things Web Page. Available online: https://iot.telefonica.com/thinking-things (accessed on 31 January 2019).
- SensorCloud Web Page. Available online: http://www.sensorcloud.com/ (accessed on 31 January 2019).
- Amazon Web Services Web Page. Available online: https://aws.amazon.com/ (accessed on 31 January 2019).
- Google Cloud Platform. Available online: https://cloud.google.com (accessed on 31 January 2019).
- Aleixandre, M.; Gerboles, M. Review of small commercial sensors for indicative monitoring of ambient gas. Chem. Eng. Trans. 2012, 30, 169–174. [Google Scholar] [CrossRef]
- Lewis, A.C.; Lee, J.; Edwards, P.M.; Shaw, M.D.; Evans, M.J.; Moller, S.J.; Smith, K.; Ellis, M.; Gillott, S.; White, A.; et al. Evaluating the performance of low cost chemical sensors for air pollution research. Faraday Discuss. 2016, 189, 85–103. [Google Scholar] [CrossRef] [PubMed]
- Piedrahita, R.; Xiang, Y.; Masson, N.; Ortega, J.; Collier, A.; Jiang, Y.; Li, K.; Dick, R.P.; Lv, Q.; Hannigan, M.; et al. The next generation of low-cost personal air quality sensors for quantitative exposure monitoring. Atmos. Meas. Tech. 2014, 7, 3325–3336. [Google Scholar] [CrossRef] [Green Version]
- Wolfrum, E.J.; Meglen, R.M.; Peterson, D.; Sluiter, J. Calibration Transfer Among Sensor Arrays Designed for Monitoring Volatile Organic Compounds in Indoor Air Quality. IEEE Sensors J. J. 2006, 6, 1638–1643. [Google Scholar] [CrossRef]
- Smith, K.R.; Edwards, P.M.; Evans, M.J.; Lee, J.D.; Shaw, M.D.; Squires, F.; Wilde, S.; Lewis, A.C. Clustering approaches to improve the performance of low cost air pollution sensors. Faraday Discuss. 2017, 200, 621–637. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marco, S.; Gutiérrez-Gálvez, A. Signal and Data Processing for Machine Olfaction and Chemical Sensing: A Review. Sensors J. IEEE 2012, 12, 3189–3214. [Google Scholar] [CrossRef]
- Gutierrez-Osuna, R. Pattern analysis for machine olfaction: A review. IEEE Sens. J. 2002, 2, 189–202. [Google Scholar] [CrossRef]
- Scott, S.M.; James, D.; Ali, Z. Data analysis for electronic nose systems. Microchim. Acta 2007, 156, 183–207. [Google Scholar] [CrossRef]
- Brereton, R.G. Pattern recognition in chemometrics. Chemom. Intell. Lab. Syst. 2015, 149, 90–96. [Google Scholar] [CrossRef]
- Lozano, J.; Suárez, J.I.; Arroyo, P.; Ordiales, J.M.; Álvarez, F. Wireless Sensor Network For Indoor Air Quality Monitoring. Chem. Eng. 2012, 30, 319–324. [Google Scholar] [CrossRef]
- Arroyo, P.; Lozano, J.; Suárez, J.I.; Herrero, J.L.; Carmona, P. Wireless sensor network for indoor air quality monitoring and Control. Chem. Eng. Trans. 2016, 54, 217–222. [Google Scholar] [CrossRef]
- Arroyo, P.; Lozano, J.; Suárez, J. Evolution of Wireless Sensor Network for Air Quality Measurements. Electronics 2018, 7, 342. [Google Scholar] [CrossRef]
- Kittler, J.; Young, P.C. A new approach to feature selection based on the Karhunen-Loeve expansion. Pattern Recognit. 1973, 5, 335–352. [Google Scholar] [CrossRef]
- De Vito, S.; Esposito, E.; Salvato, M.; Popoola, O.; Formisano, F.; Jones, R.; Di Francia, G. Calibrating chemical multisensory devices for real world applications: An in-depth comparison of quantitative machine learning approaches. Sensors Actuators B Chem. 2018, 255, 1191–1210. [Google Scholar] [CrossRef] [Green Version]
- Laref, R.; Losson, E.; Sava, A.; Siadat, M.; Laref, R.; Losson, E.; Sava, A.; Siadat, M. Support Vector Machine Regression for Calibration Transfer between Electronic Noses Dedicated to Air Pollution Monitoring. Sensors 2018, 18, 3716. [Google Scholar] [CrossRef] [PubMed]
- Esposito, E.; De Vito, S.; Salvato, M.; Fattoruso, G.; Di Francia, G. Computational Intelligence for Smart Air Quality Monitors Calibration. In Proceedings of the Computational Science and Its Applications—ICCSA 2017, Trieste, Italy, 3–6 July 2017; pp. 443–454. [Google Scholar] [CrossRef]
- Vapnik, V.; Golowich, S.E. Support Vector Method for Function Approximation, Regression Estimation, and Signal Processing. Adv. Neural Inf. Process. Syst. 1996, 9, 281–287. [Google Scholar]
- Gardner, M.W.; Dorling, S.R. Artificial neural networks (the multilayer perceptron)—A review of applications in the atmospheric sciences. Atmos. Environ. 1998, 32, 2627–2636. [Google Scholar] [CrossRef]
- Specht, D.F. Probabilistic neural networks. Neural Networks 1990, 3, 109–118. [Google Scholar] [CrossRef]
- W3C Accessible Rich Internet Applications (WAI-ARIA) 1.1. Available online: https://www.w3.org/TR/2017/REC-wai-aria-1.1-20171214/ (accessed on 2 May 2018).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| B10 | B15 | B20 | B25 | T10 | T15 | T20 | T25 | E10 | E15 | E20 | E25 | X10 | X15 | X20 | X25 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| B10 | 8 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| B15 | 0 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| B20 | 0 | 0 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| B25 | 0 | 0 | 0 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T10 | 0 | 0 | 0 | 0 | 7 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| T15 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T20 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| T25 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| E10 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| E15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 0 | 0 | 0 | 0 | 0 |
| E20 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 0 | 0 | 0 | 0 |
| E25 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 0 | 0 | 0 |
| X10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 8 | 1 | 0 | 0 |
| X15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 0 |
| X20 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 |
| X25 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 6 |
| RMSE | R-Squared | MSE | MAE | Training Speed (s) | |
|---|---|---|---|---|---|
| Benzene | 0.6017 | 0.99 | 0.3620 | 0.5428 | 1.36 |
| Toluene | 0.5741 | 0.99 | 0.3296 | 0.5126 | 0.52 |
| Ethylbenzene | 0.5289 | 0.99 | 0.2797 | 0.4548 | 0.80 |
| Xylene | 0.8727 | 0.98 | 0.7615 | 0.7442 | 1.03 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arroyo, P.; Herrero, J.L.; Suárez, J.I.; Lozano, J. Wireless Sensor Network Combined with Cloud Computing for Air Quality Monitoring. Sensors 2019, 19, 691. https://doi.org/10.3390/s19030691
Arroyo P, Herrero JL, Suárez JI, Lozano J. Wireless Sensor Network Combined with Cloud Computing for Air Quality Monitoring. Sensors. 2019; 19(3):691. https://doi.org/10.3390/s19030691
Chicago/Turabian StyleArroyo, Patricia, José Luis Herrero, José Ignacio Suárez, and Jesús Lozano. 2019. "Wireless Sensor Network Combined with Cloud Computing for Air Quality Monitoring" Sensors 19, no. 3: 691. https://doi.org/10.3390/s19030691
APA StyleArroyo, P., Herrero, J. L., Suárez, J. I., & Lozano, J. (2019). Wireless Sensor Network Combined with Cloud Computing for Air Quality Monitoring. Sensors, 19(3), 691. https://doi.org/10.3390/s19030691