Sensors Information Fusion System with Fault Detection Based on Multi-Manifold Regularization Neighborhood Preserving Embedding




Abstract
:1. Introduction
2. Background and Related Theoretical Reviews
2.1. One Small Sensor Information Fusion System
2.2. Neighborhood Preserving Embedding
2.3. Locality Preserving Projection
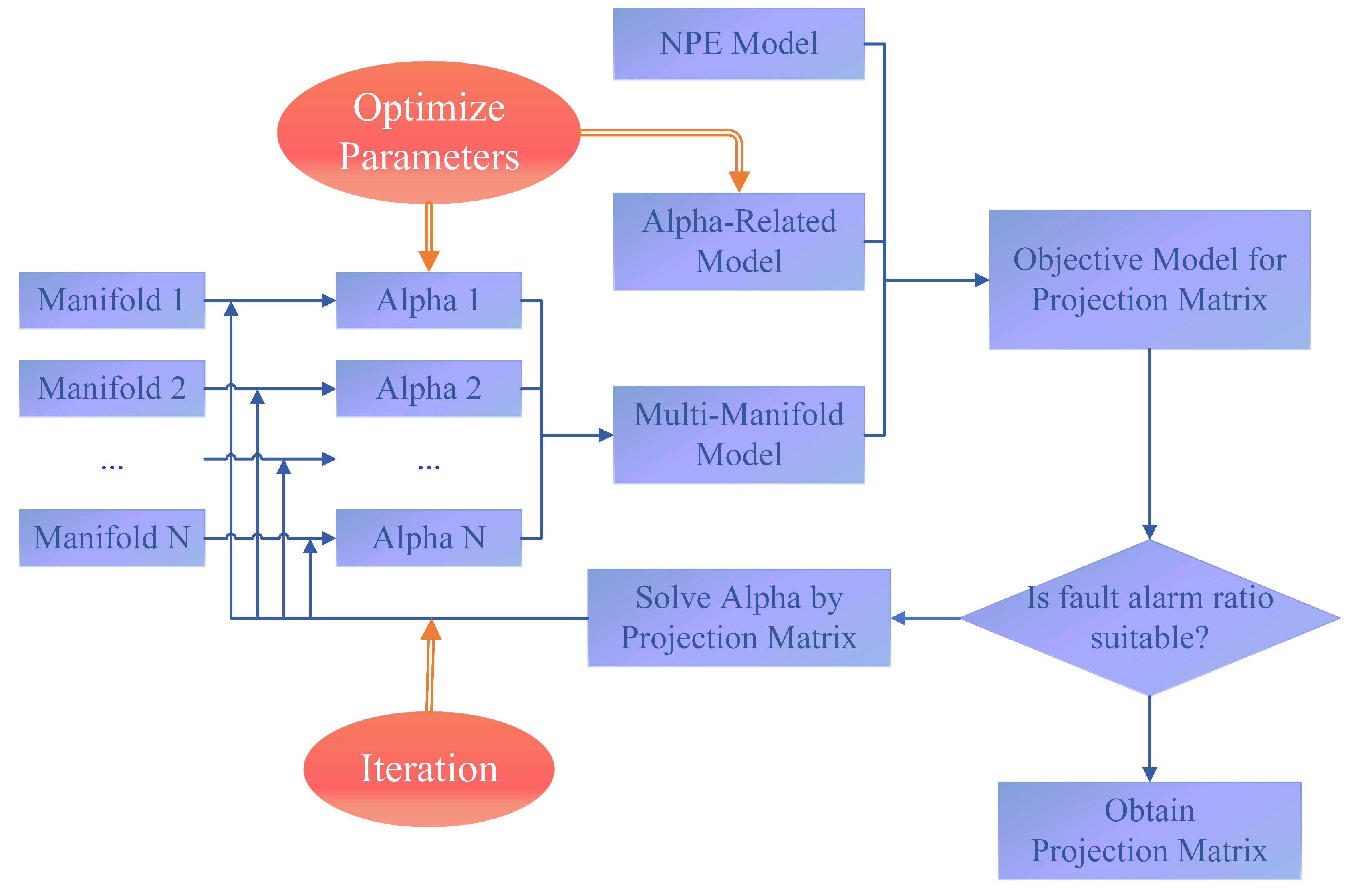
3. Multi-Manifold Regularization Neighborhood Preserving Embedding
- Compute the normalized graph Laplacians of different manifolds with Equation (5).
- Compute the initial with pre-given manifold candidates:where .
- Solve the generalized eigenvectors of the following equation as :where .
- Compute with a series of optimized .
- Solve the generalized eigenvectors of the following equation as :
- Obtain the embedding as follows:
- In our MMRNPE, it takes the Euclidean distance of both designated point and paired points into adequate consideration, which guarantees the balance between local and global information from sensor data.
- Multiple parameters are included in this algorithm, some of which are of regularization purpose and the others are of limitation consideration. Now that various choices of parameters will result in distinction of performance, some optimization algorithms can be chosen to promise the fault detection rate.
- Some of the regularized parameters are able to judge the membership relationship of elements, i.e., the membership between local information with NPE algorithm and variance information with LPP algorithm is displayed intuitively, which realizes the sensor information fusion.
4. Experiments
4.1. Fault Detection Strategy
- Collect original data set X and normalize it with zero mean and unit variance.
- Compute the projection matrix with the proposed MMRNPE algorithm.
- Calculate the dimensional-reduction data set Y with the linear mapping.
- Compute the performance statistics and SPE of offline data set.
- Construct the upper control limits of and as the standard of online data.
- Collect online data set and normalize it with zero mean and unit variance.
- Calculate the dimensional-reduction data set Y with the projection matrix obtained in offline procedure.
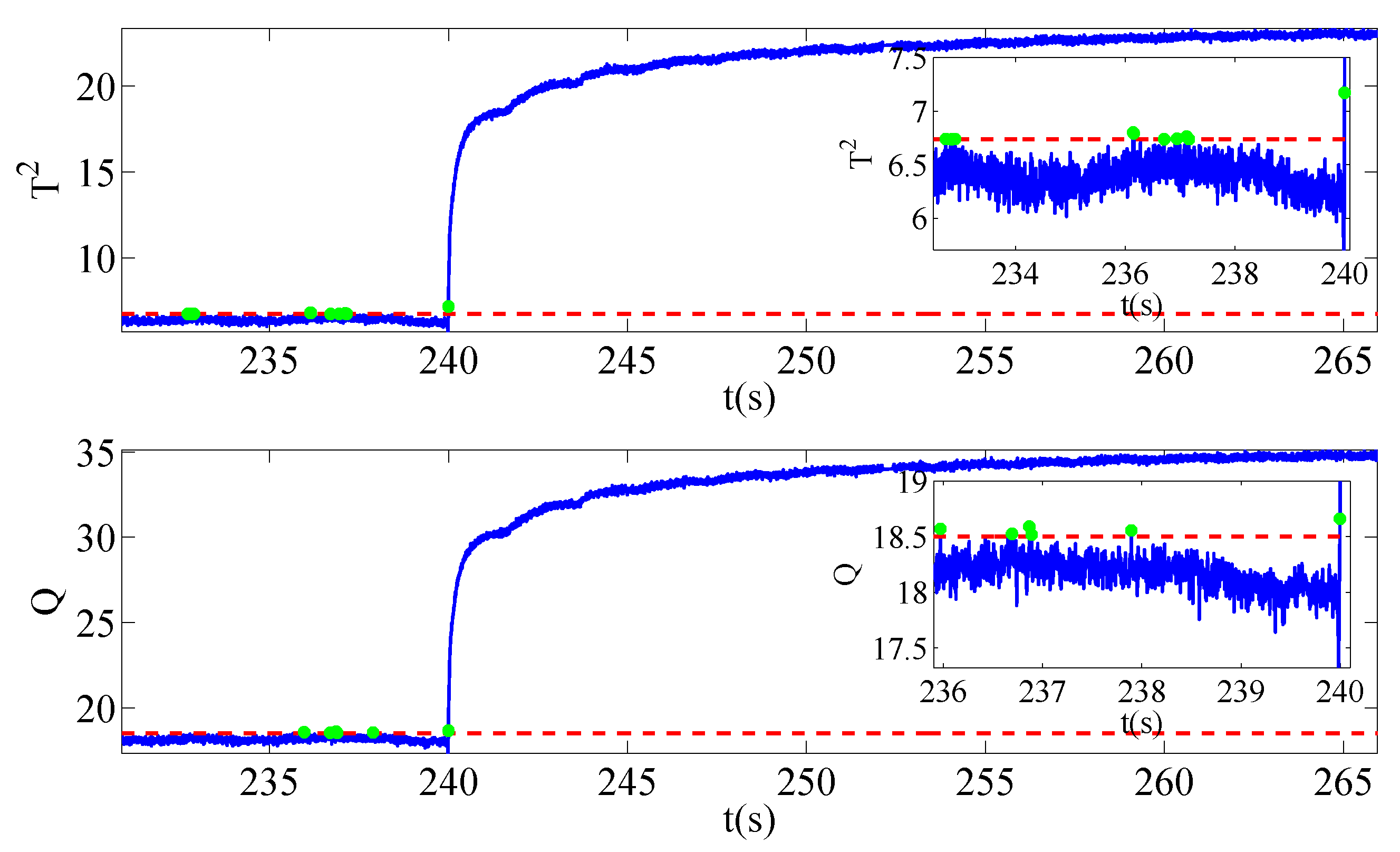
- Compute the performance statistics and SPE of the online data set and compare them with the upper control limits of and from the offline process.
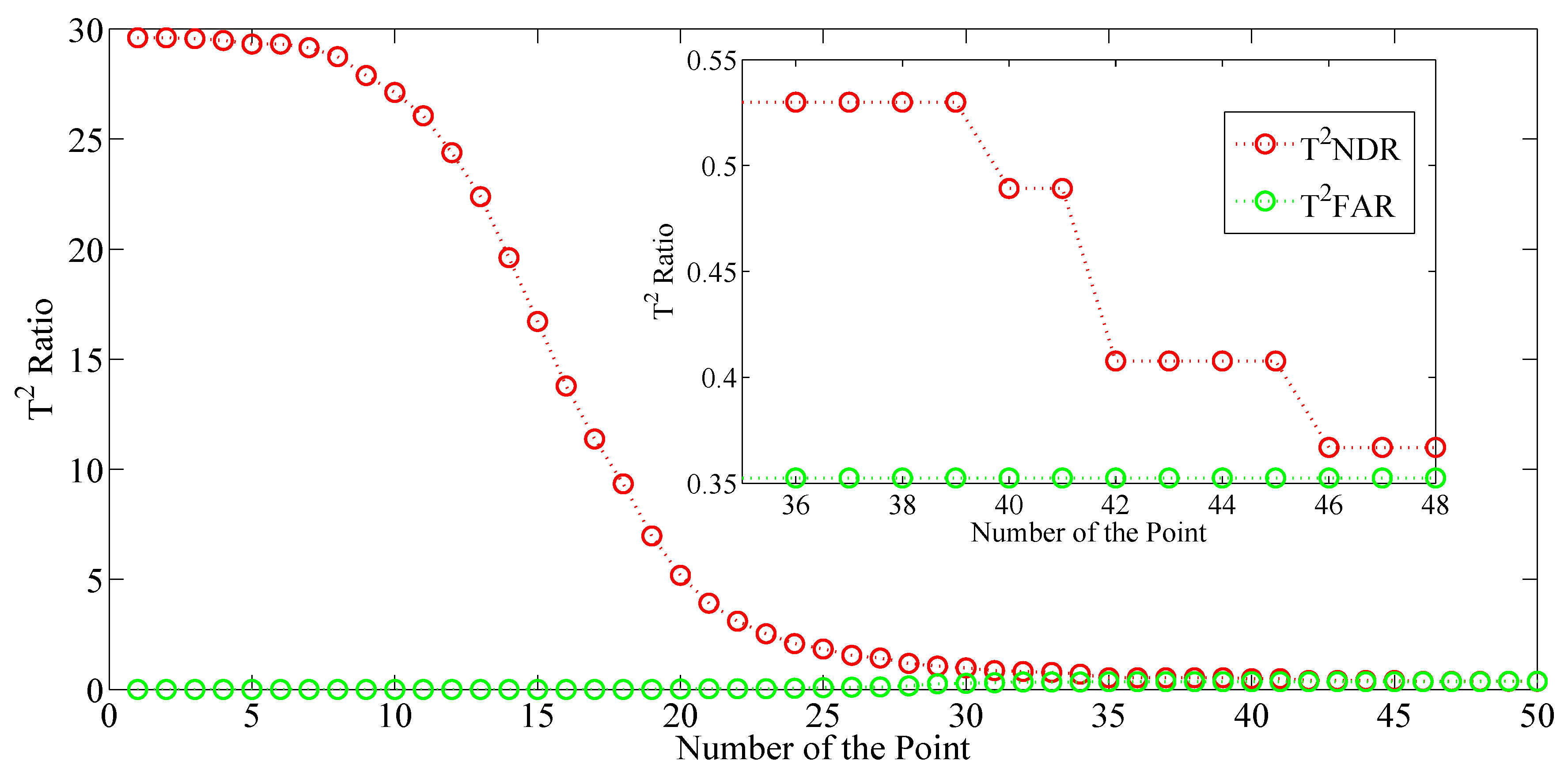
- Compute the fault alarm ratio (FAR), non-detection ratio (NDR) and total detection rate (TDR) to evaluate the fault detection ability of this MMRNPE algorithm.
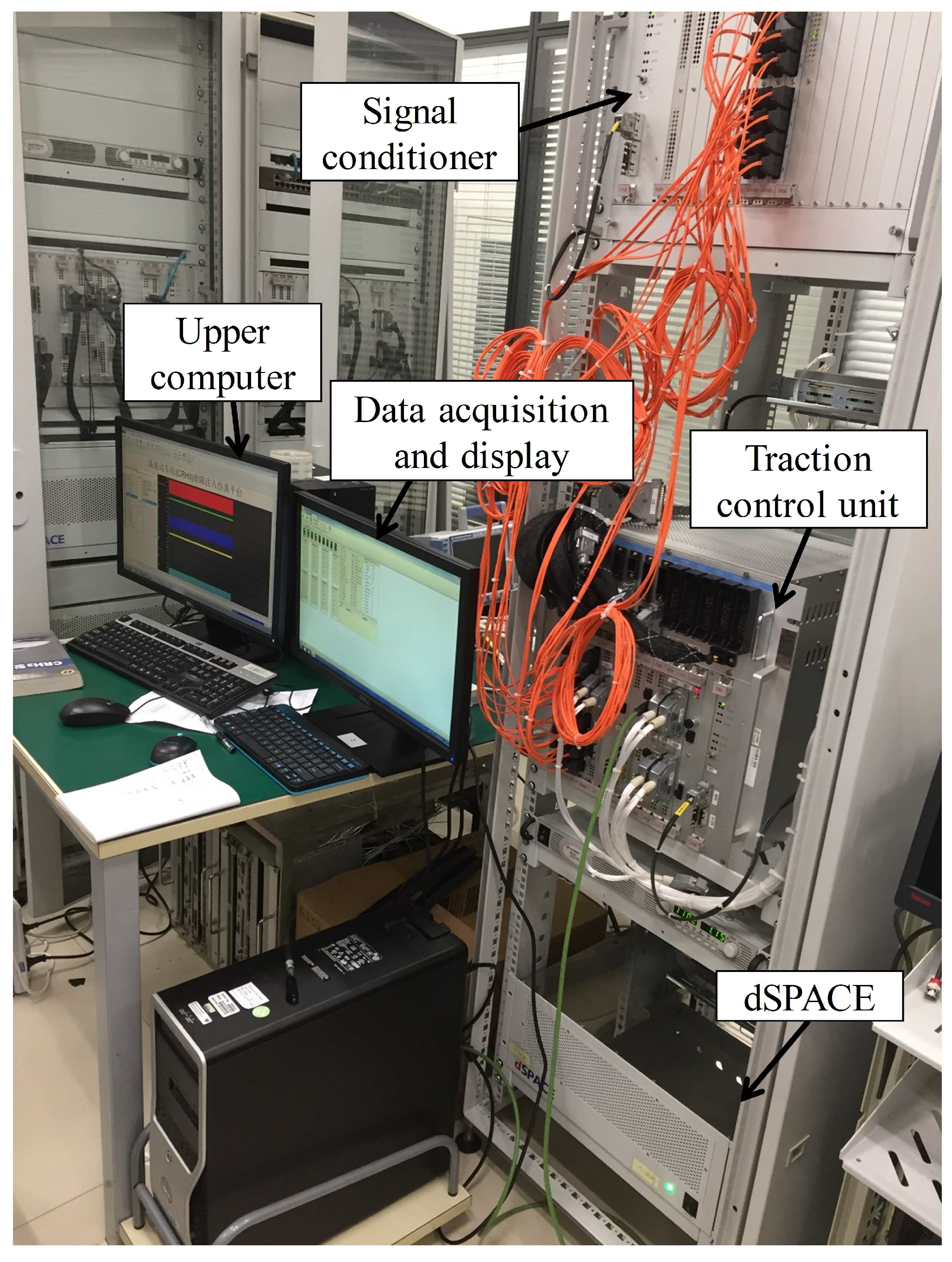
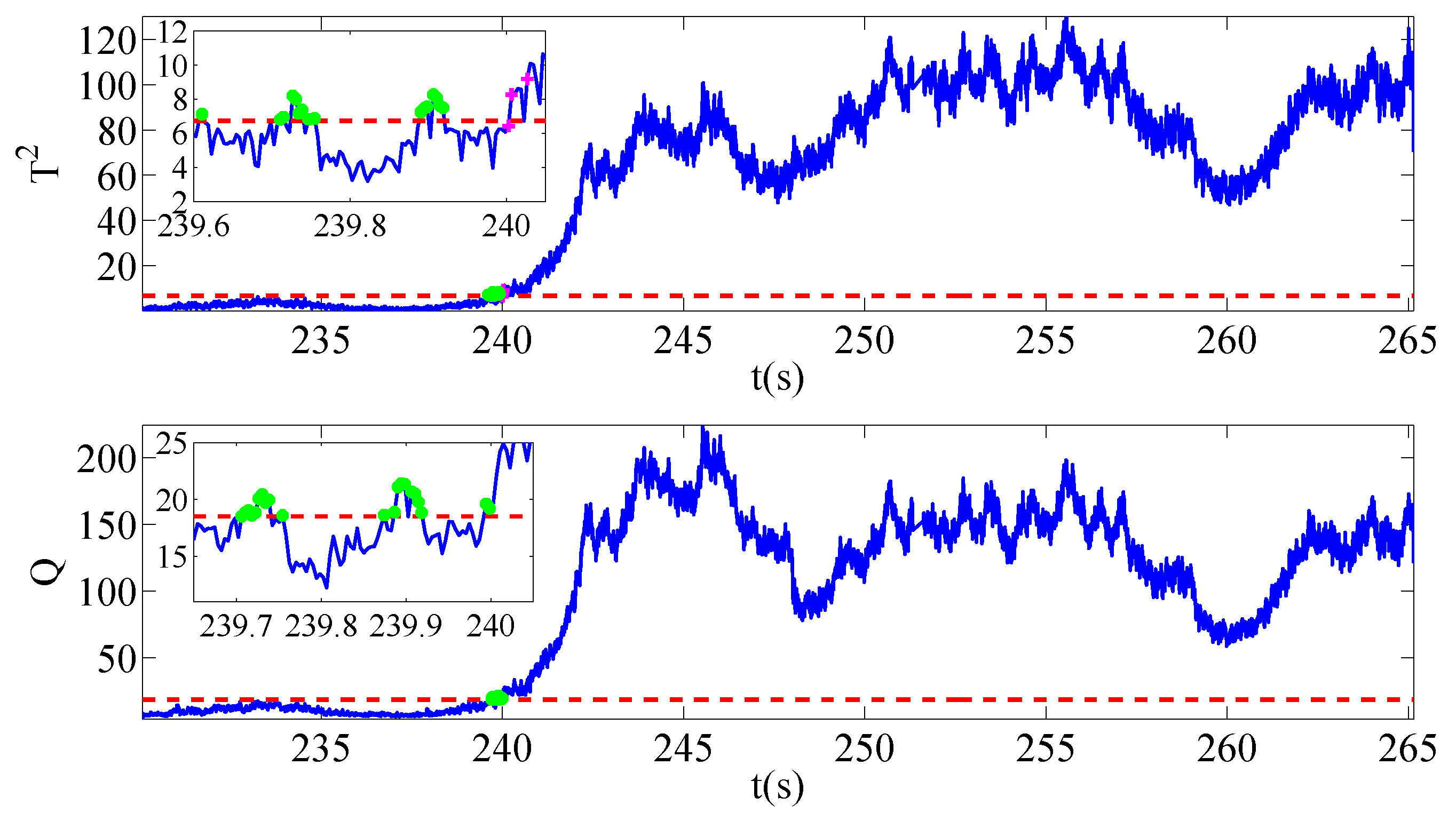
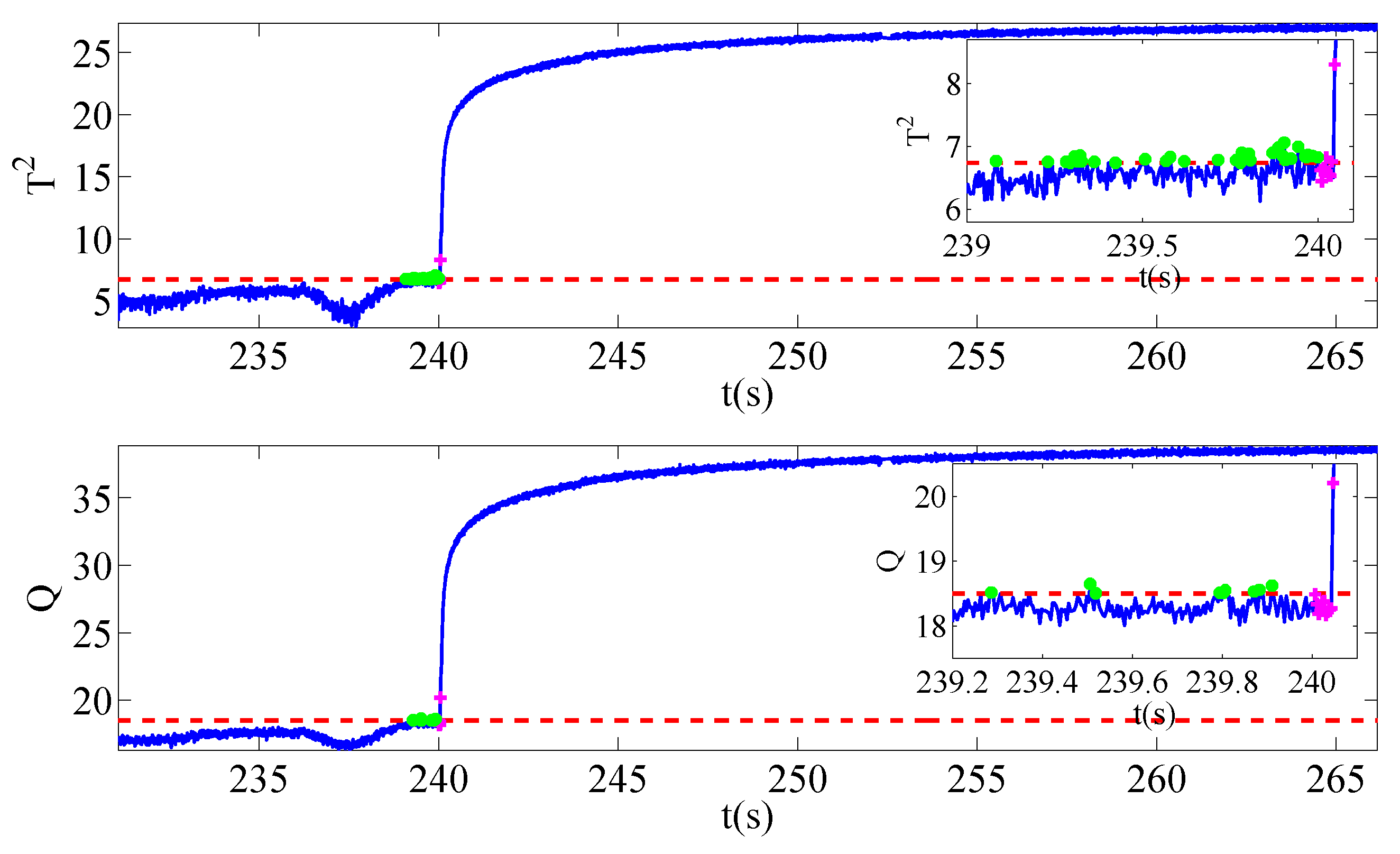
4.2. Experiments Verification with the Proposed MMRNPE
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| NPE | Neighborhood Preserving Embedding |
| MMRNPE | Multi-Manifold Regularization Neighborhood Preserving Embedding |
| LPP | Locality Preserving Embedding |
| LE | Laplacian Eigenmap |
| LLE | Locally Linear Embedding |
| SPE | Square Prediction Error |
| FAR | Fault Alarm Ratio |
| NDR | Non-Detection Ratio |
| TDR | Total Detection Ratio |
References
- Vitola, J.; Pozo, F.; Tibaduiza, D.A.; Anaya, M. A sensor data fusion system based on k-nearest neighbor pattern classification for structural health monitoring applications. Sensors 2017, 17, 417. [Google Scholar] [CrossRef] [PubMed]
- Garramiola, F.; del Olmo, J.; Poza, J.; Madina, P.; Almandoz, G. Integral sensor fault detection and isolation for railway traction drive. Sensors 2018, 18, 1543. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; He, S.; Chen, J. Data gathering optimization by dynamic sensing and routing in rechargeable sensor networks. IEEE/ACM Trans. Netw. 2016, 24, 1632–1646. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Chen, W.; Yi, H. Data-driven detection and diagnosis of incipient faults in electrical drives of hgh-speed trains. IEEE Trans. Ind. Electron. 2019, 66, 4716–4725. [Google Scholar] [CrossRef]
- Jlassi, I.; Estima, J.O.; El Khil, S.K.; Bellaaj, N.M.; Cardoso, A.J.M. A robust observer-based method for IGBTs and current sensors fault diagnosis in voltage-source inverters of PMSM drives. IEEE Trans. Ind. Appl. 2017, 53, 2894–2905. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Lu, N. A newly robust fault detection and diagnosis method for high-speed trains. IEEE Trans. Intell. Transp. Syst. 2018. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B. A review of fault detection and diagnosis for the traction system in high-speed trains. IEEE Trans. Intell. Transp. Syst. 2019. [Google Scholar] [CrossRef]
- Yunusa-Kaltungo, A.; Sinha, J.K. Faults diagnosis in rotating machines using higher order spectra. In Proceedings of the ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, Düsseldorf, Germany, 16–20 June 2014; p. V07AT31A002. [Google Scholar]
- Ehlenbröker, J.F.; Mönks, U.; Lohweg, V. Sensor defect detection in multisensor information fusion. J. Sens. Sens. Syst. 2016, 5, 337–353. [Google Scholar] [CrossRef] [Green Version]
- Najjar, N.; Gupta, S.; Hare, J.; Kandil, S.; Walthall, R. Optimal sensor selection and fusion for heat exchanger fouling diagnosis in aerospace systems. IEEE Sens. J. 2016, 16, 4866–4881. [Google Scholar] [CrossRef]
- Yunusa-Kaltungo, A.; Sinha, J.K. Generic vibration-based faults identification approach for identical rotating machines installed on different foundations, VIRM 11-Vibrations in Rotating. Machinery 2016, 11, 499–510. [Google Scholar]
- Jafarian, K.; Mobin, M.; Jafari-Marandi, R.; Rabiei, E. Misfire and valve clearance faults detection in the combustion engines based on a multi-sensor vibration signal monitoring. Measurement 2018, 128, 527–536. [Google Scholar] [CrossRef]
- Saimurugan, M.; Ramprasad, R. A dual sensor signal fusion approach for detection of faults in rotating machines. J. Vib. Control 2018, 24, 2621–2630. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, W.; Tang, Z.; Chen, Y. Multi-sensor data fusion using a relevance vector machine based on an ant colony for gearbox fault detection. Sensors 2015, 15, 21857–21875. [Google Scholar] [CrossRef]
- Irhoumah, M.; Pusca, R.; Lefevre, E.; Mercier, D.; Romary, R.; Demian, C. Information fusion with belief functions for detection of interturn short-circuit faults in electrical machinves using external flux sensors. IEEE Trans. Ind. Electron. 2018, 65, 2642–2652. [Google Scholar] [CrossRef]
- Luwei, K.C.; Yunusa-Kaltungo, A.; Sha’aban, Y.A. Integrated Fault Detection Framework for Classifying Rotating Machine Faults Using Frequency Domain Data Fusion and Artificial Neural Networks. Machines 2018, 6, 59. [Google Scholar] [CrossRef]
- Luwei, K.C.; Sinha, J.K.; Yunusa-Kaltungo, A.; Elbhbah, K. Data fusion of acceleration and velocity features (dFAVF) approach for fault diagnosis in rotating machines. MATEC Web Conf. 2018, 211, 21005. [Google Scholar] [CrossRef]
- Rizal, M.; Ghani, J.A.; Nuawi, M.Z.; Haron, C.H. Cutting tool wear classification and detection using multi-sensor signals and Mahalanobis-Taguchi System. Wear 2017, 15, 1759–1765. [Google Scholar] [CrossRef]
- Yunusa-Kaltungo, A.; Sinha, J.K.; Elbhbah, K. An improved data fusion technique for faults diagnosis in rotating machines. Measurement 2014, 58, 27–32. [Google Scholar] [CrossRef]
- Yunusa-Kaltungo, A.; Sinha, J.K.; Nembhard, A.D. A novel fault diagnosis technique for enhancing maintenance and reliability of rotating machines. Struct. Health Monit. 2015, 14, 604–621. [Google Scholar] [CrossRef] [Green Version]
- Jing, L.; Wang, T.; Zhao, M.; Wang, P. An adaptive multi-sensor data fusion method based on deep convolutional neural networks for fault diagnosis of planetary gearbox. Sensors 2017, 17, 414. [Google Scholar] [CrossRef] [PubMed]
- Ge, Z.; Song, Z.; Ding, S.X.; Huang, B. Data mining and analytics in the process industry: The role of machine learning. IEEE Access 2017, 5, 20590–20616. [Google Scholar] [CrossRef]
- Harandi, M.; Salzmann, M.; Hartley, R. Dimensionality reduction on SPD manifolds: The emergence of geometry-aware methods. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 48–62. [Google Scholar] [CrossRef]
- He, X.; Cai, D.; Yan, S.; Zhang, H. Neighborhood preserving embedding. In Proceedings of the 10th IEEE International Conference on Computer Vision, Beijing, China, 17–21 October 2005; pp. 1208–1213. [Google Scholar]
- He, X.; Niyogi, P. Locality preserving projections. Adv. Neural Inf. Process. Syst. 2004, 16, 153–160. [Google Scholar]
- Belkin, M.; Niyogi, P. Laplacian eigenmaps and spectral techniques for embedding and clustering. Adv. Neural Inf. Process. Syst. 2002, 10, 585–591. [Google Scholar]
- Roweis, S.T.; Saul, L.K. Nonlinear dimensionality reduction by locally linear embedding. Science 2000, 290, 2323–2326. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Yan, S.; Hu, Y.; Niyogi, P.; Zhang, H.J. Face recognition using laplacianfaces. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 328–340. [Google Scholar] [PubMed]
- Belhumeur, P.N.; Hespanha, J.P.; Kriegman, D.J. Eigenfaces vs. fisherfaces: Recognition using class specific linear projection. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 711–720. [Google Scholar] [CrossRef]
- Jolliffe, I. Principal Component Analysis. In International Encyclopedia of Statistical Science; Miodrag Lovric; Springer: Berlin/Heidelberg, Germany, 2011; pp. 1094–1096. [Google Scholar]
- Mika, S.; Ratsch, G.; Weston, J.; Scholkopf, B.; Mullers, K.R. Fisher discriminant analysis with kernels. In Proceedings of the 1999 IEEE Signal Processing Society Workshop, Madison, WI, USA, 25 August 1999; pp. 41–48. [Google Scholar]
- Belkin, M.; Niyogi, P.; Sindhwani, V. Manifold regularization: A geometric framework for learning from labeled and unlabeled examples. J. Mach. Learn. Res. 2006, 10, 2399–2434. [Google Scholar]
- Li, X.; Ng, M.K.; Cong, G.; Ye, Y.; Wu, Q. MR-NTD: Manifold regularization nonnegative tucker decomposition for tensor data dimension reduction and representation. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 1787–1800. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Lu, Q.; Dong, Y.; Tao, D. SCE: A manifold regularized set-covering method for data partitioning. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1760–1773. [Google Scholar] [CrossRef] [PubMed]
- Luo, C.; Ma, L. Manifold regularized distribution adaptation for classification of remote sensing images. IEEE Access 2018, 6, 4697–4708. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Lu, N.; Chen, W. Probability-relevant incipient fault detection and diagnosis methodology with applications to electric drive systems. IEEE Trans. Control Syst. Technol. 2018. [Google Scholar] [CrossRef]
- Jiang, Q.; Shen, Y.; Li, H.; Xu, F. New fault recognition method for rotary machinery based on information entropy and a probabilistic neural network. Sensors 2018, 18, 337. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Villecco, F.; Li, M.; Song, W. Multi-Scale permutation entropy based on improved LMD and HMM for rolling bearing diagnosis. Entropy 2017, 19, 176. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B.; Endo, H. The enhancement of fault detection and diagnosis in rolling element bearings using minimum entropy deconvolution combined with spectral kurtosis. Mech. Syst. Signal Process. 2007, 21, 2616–2633. [Google Scholar] [CrossRef]
- Luo, H.; Yang, X.; Krueger, M.; Ding, S.X.; Peng, K. A plug-and-play monitoring and control architecture for disturbance compensation in rolling mills. IEEE/ASME Trans. Mechatron. 2018, 23, 200–210. [Google Scholar] [CrossRef]
- He, W.; He, Y.; Zhang, C. A new fault diagnosis approach for analog circuits based on spectrum image and feature weighted kernel Fisher discriminant analysis. Rev. Sci. Instrum. 2018, 89, 074702. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Q.; Yan, X. Parallel PCA–KPCA for nonlinear process monitoring. Control Eng. Pract. 2018, 80, 17–25. [Google Scholar] [CrossRef]
- Tian, E.; Wang, Z.; Zou, L.; Yue, D. Probabilistic-constrained filtering for a class of nonlinear systems with improved static event-triggered communication. Int. J. Robust Nonlinear Control. 2018, 29, 1484–1498. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value (Unit) |
|---|---|---|
| sampling time | (s) | |
| p | pole pairs | |
| voltage of charge source | 400 (V) | |
| resistance in stator side | ||
| resistance in rotor side | ||
| inductance in stator side | (H) | |
| inductance in rotor side | (H) | |
| mutual inductance of motor | (H) | |
| leakage inductance in stator side | (H) | |
| leakage inductance in rotor side | (H) | |
| intermediate voltage | 3300 (V) | |
| capacitor of direct current link | (F) | |
| J | rotary inertia | 100 (kg·m) |
| L | filter inductance | (H) |
| C | filter capacitor | (F) |
| Notations | Fault Description | Expression | Sample Number |
|---|---|---|---|
| N | normal | normal | 250 |
| current sensor fault | A | 8695 | |
| voltage sensor fault | V | 8695 | |
| speed sensor fault | rad/s | 8695 |
| Algorithm | MMRNPE | NPE | |||||
|---|---|---|---|---|---|---|---|
| Sensor Fault | Statistics | FAR(%) | NDR(%) | TDR(%) | FAR(%) | NDR(%) | TDR(%) |
| SPE | 0.8464 | 0 | 0.0024 | 0.8464 | 0 | 0.0024 | |
| 0.0021 | 0 | 12.3270 | 0.0881 | ||||
| SPE | 0.3136 | 0.1393 | 0.0021 | 0.4032 | 0.1547 | 0.0022 | |
| 0.0048 | 11.0663 | 0.0464 | 0.0288 | ||||
| SPE | 0.1754 | 0 | 0.000345 | 0.2630 | 0 | 0.0069 | |
| 0 | 0.0010 | 0.3725 | 0.0156 | 0.0015 | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Jiang, B.; Chen, H.; Liu, J. Sensors Information Fusion System with Fault Detection Based on Multi-Manifold Regularization Neighborhood Preserving Embedding. Sensors 2019, 19, 1440. https://doi.org/10.3390/s19061440
Wu J, Jiang B, Chen H, Liu J. Sensors Information Fusion System with Fault Detection Based on Multi-Manifold Regularization Neighborhood Preserving Embedding. Sensors. 2019; 19(6):1440. https://doi.org/10.3390/s19061440
Chicago/Turabian StyleWu, Jianping, Bin Jiang, Hongtian Chen, and Jianwei Liu. 2019. "Sensors Information Fusion System with Fault Detection Based on Multi-Manifold Regularization Neighborhood Preserving Embedding" Sensors 19, no. 6: 1440. https://doi.org/10.3390/s19061440
APA StyleWu, J., Jiang, B., Chen, H., & Liu, J. (2019). Sensors Information Fusion System with Fault Detection Based on Multi-Manifold Regularization Neighborhood Preserving Embedding. Sensors, 19(6), 1440. https://doi.org/10.3390/s19061440