Wi-PoS: A Low-Cost, Open Source Ultra-Wideband (UWB) Hardware Platform with Long Range Sub-GHz Backbone

 , , , , and
, , , , and 
Abstract
:1. Introduction
- Flexible interfacing with external UWB antennas gives the opportunity to optimize the antenna system for the intended use case. The localization of assets can benefit from the use of dedicated impulse radio (IR)-UWB antennas [3,4,5]. The performance of different antenna designs can be evaluated with the flexible antenna interface.
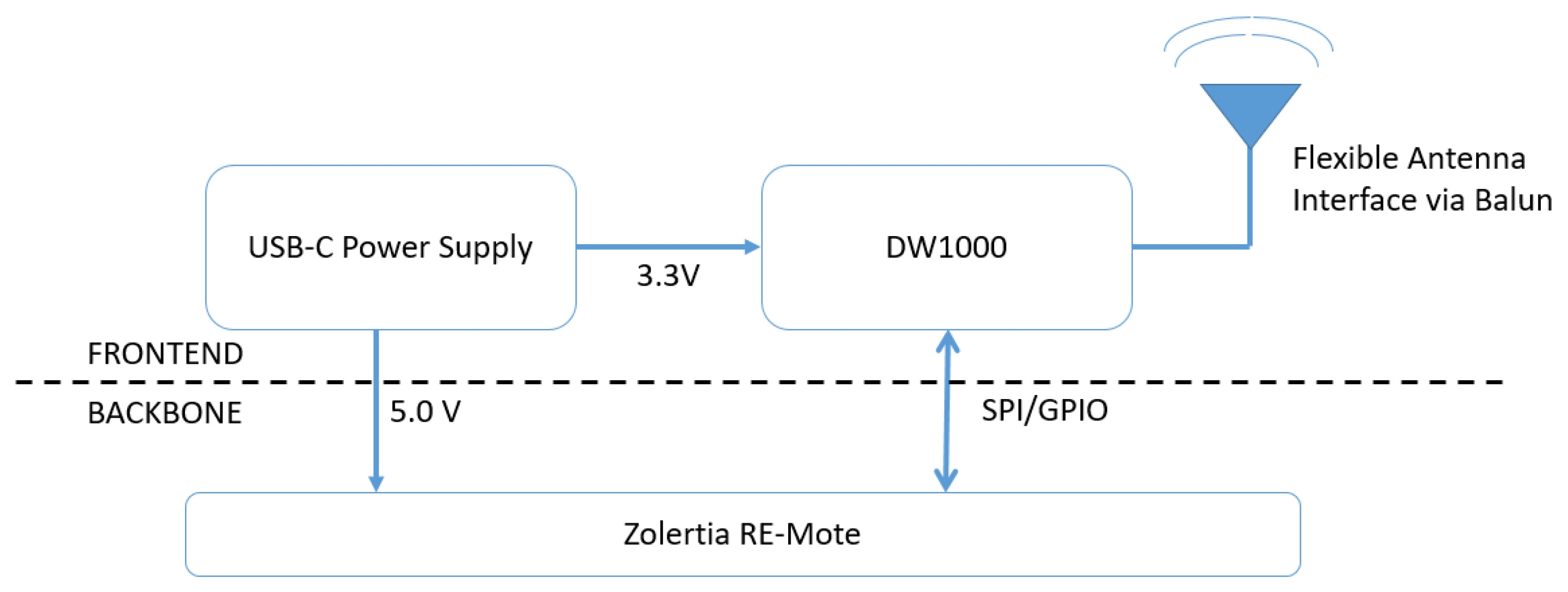
- Three complementary wireless technologies are supported: UWB, 2.4 GHz, and sub-GHz. While UWB is used for very accurate localization, the lower power consumption, long-range sub-GHz technology can be used for communication and MAC level synchronization. The sub-GHz communication between nodes allows the development of a localization system with a completely wireless backbone, similar to References [6,7], where UWB is combined with a WiFi backbone. Although 2.4 GHz communication is not used in the current implementation, it is available in the platform when designing specific use cases.
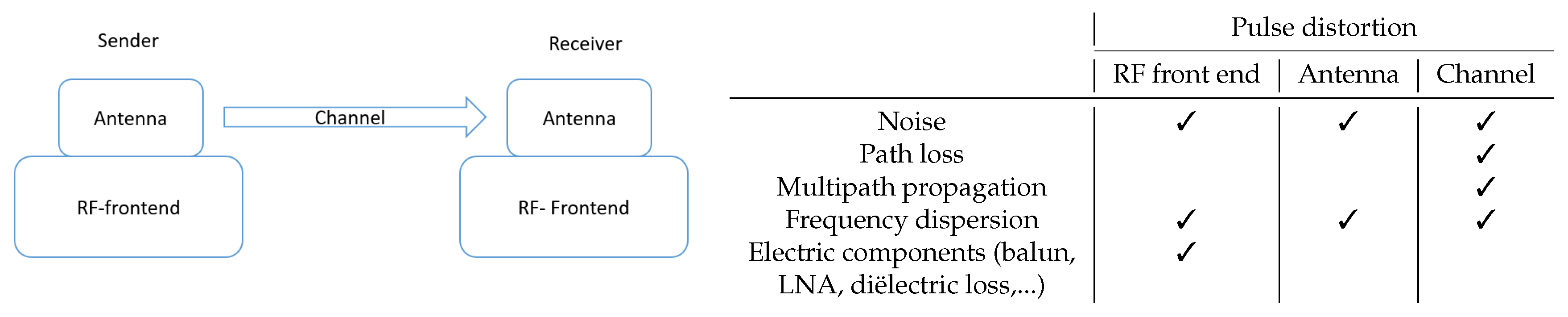
- The hardware platform guarantees excellent pulse properties by minimizing pulse distortion. Thereto, the RF design was carried out in a full-wave simulator to ensure excellent impedance matching. Moreover, the selection of PCB laminates and components was carried out with utmost care and electromagnetic interference was minimized by means of via stitching.
- The hardware platform is compatible with the Contiki OS and openWSN, allowing reuse of existing IPv6 IoT protocol stacks for UWB system designs, as well. The Time-Annotated Instruction Set Computer (TAISC) framework [8] provides an efficient way to implement the network stack and gives the opportunity to research different MAC designs and easily adjust the MAC layer to different use cases.
- The hardware devices can be configured as both anchor and tag node to build a full localization system.
- The hardware platform is provided as open-source code allowing easy integration in other projects. The source-code of the UWB hardware and MAC protocol software is provided as open-source contributions [9].
- The hardware platform is thoroughly evaluated demonstrating superior range and accuracy with an extremely low power consumption.
- Guidelines in addition to the DW1000 application notes are given, describing design optimizations which allow other designers to optimize their UWB hardware solutions.
2. Related Work
Open Source Hardware
3. Design Approach
3.1. Conceptual Design
Optimization Techniques to Minimize Pulse Distortion
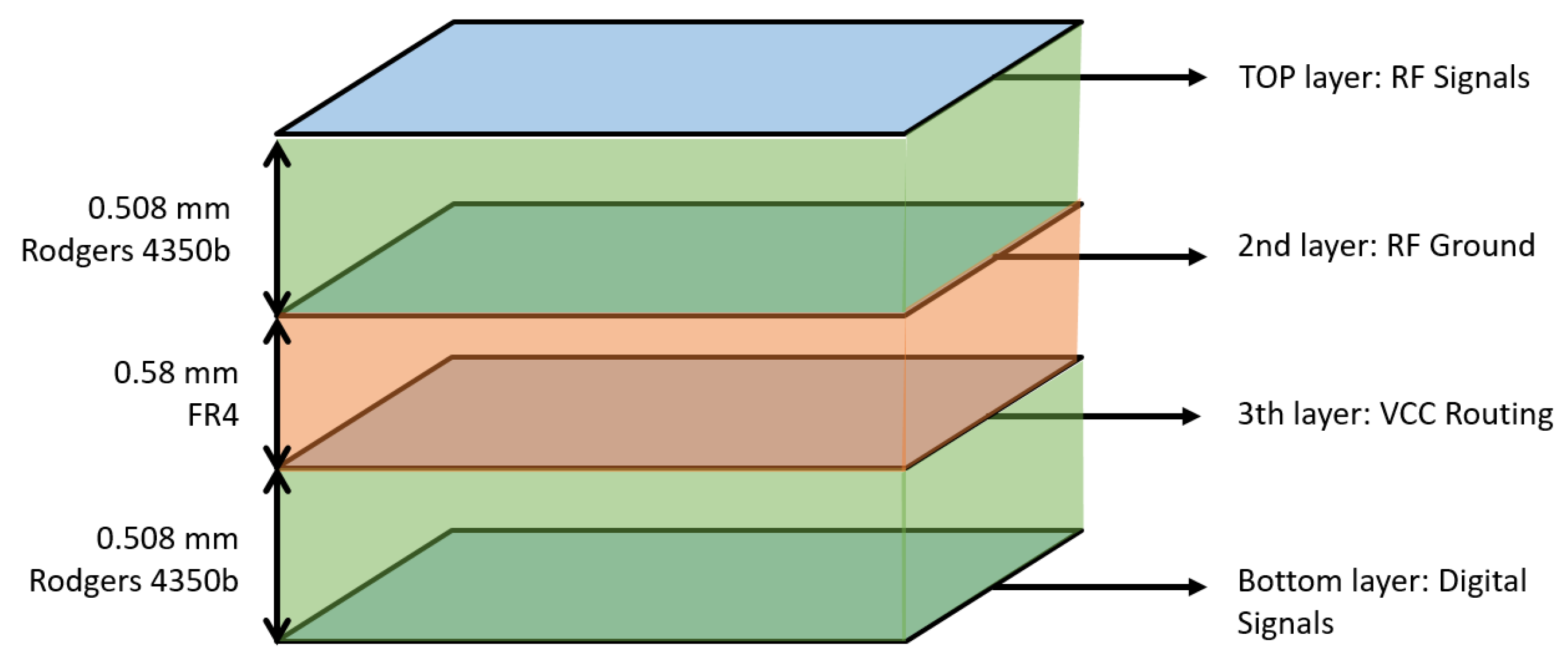
- A 4-layer stack up is used for the PCB (Figure 4). The 2nd and 3rd layer are used as the ground plane and power plane, respectively. The use of a ground plane reduces voltage drops in potential of ground level throughout the board and creates short return paths for the currents from the different components, especially for the high sensitive signals on the top layer like the transmission lines. The ground layer shields the sensitive components from different noise sources on lower layers. A separate analog and digital ground is used, joined in the middle of the board.
- The PCB has a thickness of 1.568 mm and is fabricated with high-quality Rogers 4350 (RO4350) material for optimal RF behavior between the top layer and layer 2 and between bottom layer and layer 3 (Figure 4). The dielectric constant for this material is well specified and dielectric losses are significantly smaller than with the frequently used FR4 material, especially for higher frequency use cases. Furthermore, the permittivity for RO4350 is more stable and the FR4 will have more fluctuations in permittivity between different batches.
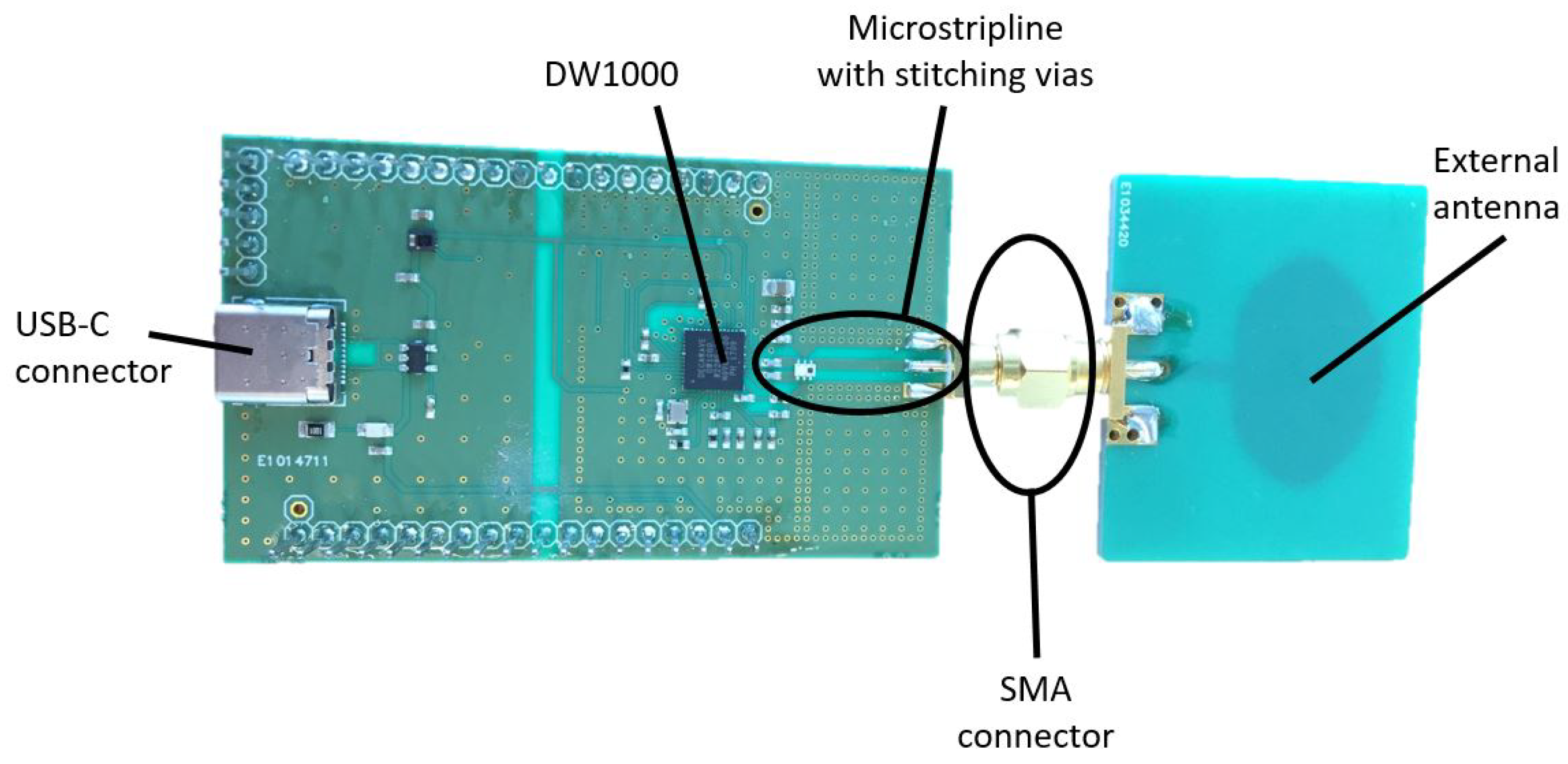
- The path from DW1000 towards the SMA connector is a straight line shielded by stitching vias to prevent electromagnetic interference and minimize pulse distortion. The widths of the microstrip lines are matched with the desired impedance: 100 Ω for the differential pair from DW1000 to balun and 50 Ω for the single transmission line from the balun to the single ended SMA connector. Care is taken that no obstacles are placed on the return path at the ground layer.
- No components are placed sideways of the path to the antenna, no signal whatsoever is routed in that area of the board, no perpendicular angles are taken in the paths, especially for sensitive high frequency signals, and the decoupling capacitors with the smallest values are placed as close as possible to the DW1000 on the power track.
3.2. Open Source Network Stack
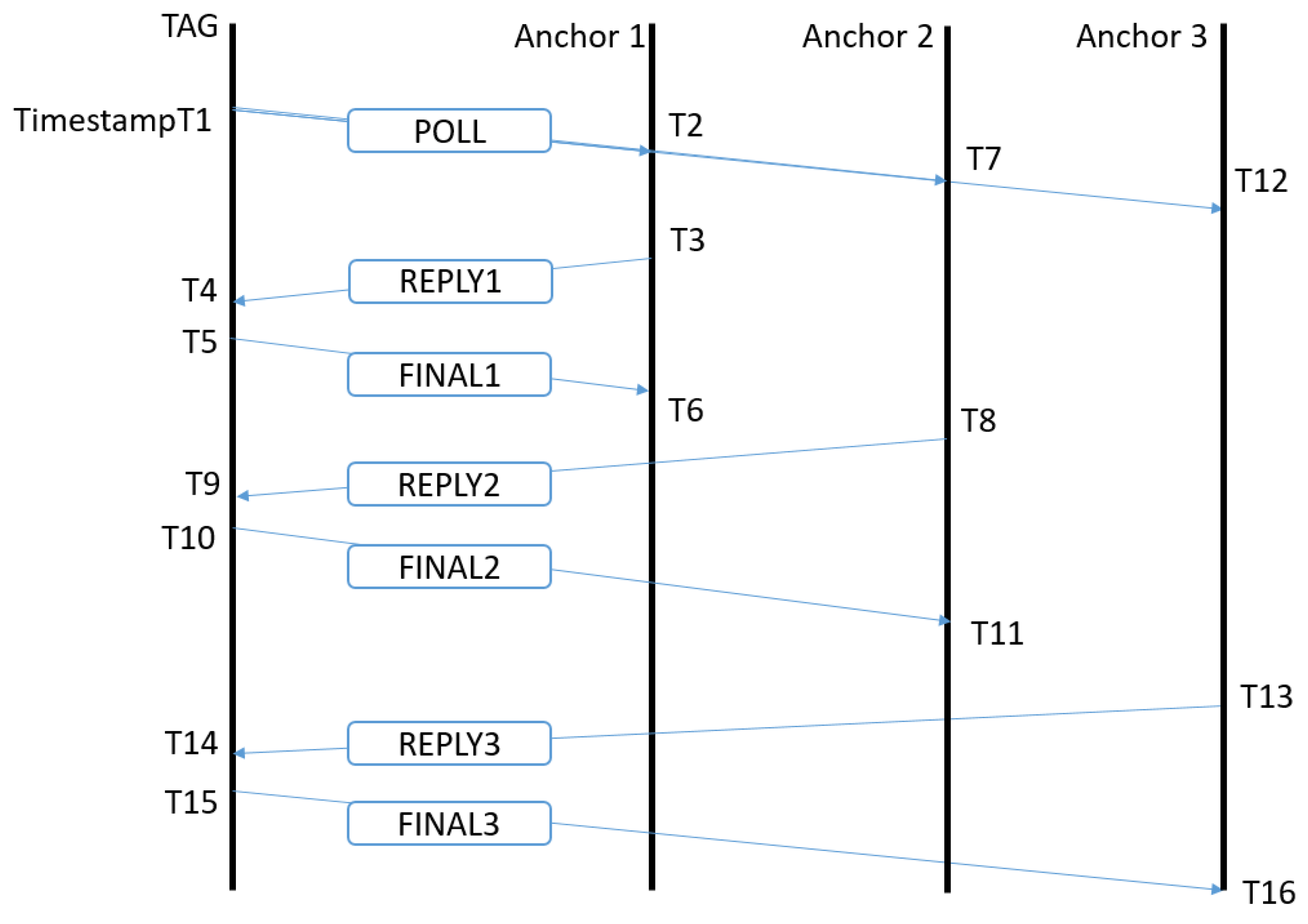
3.2.1. Localization Algorithm
3.2.2. Multi-Technology MAC Design Framework
3.2.3. Contiki OS
4. Evaluation
4.1. Test Setup
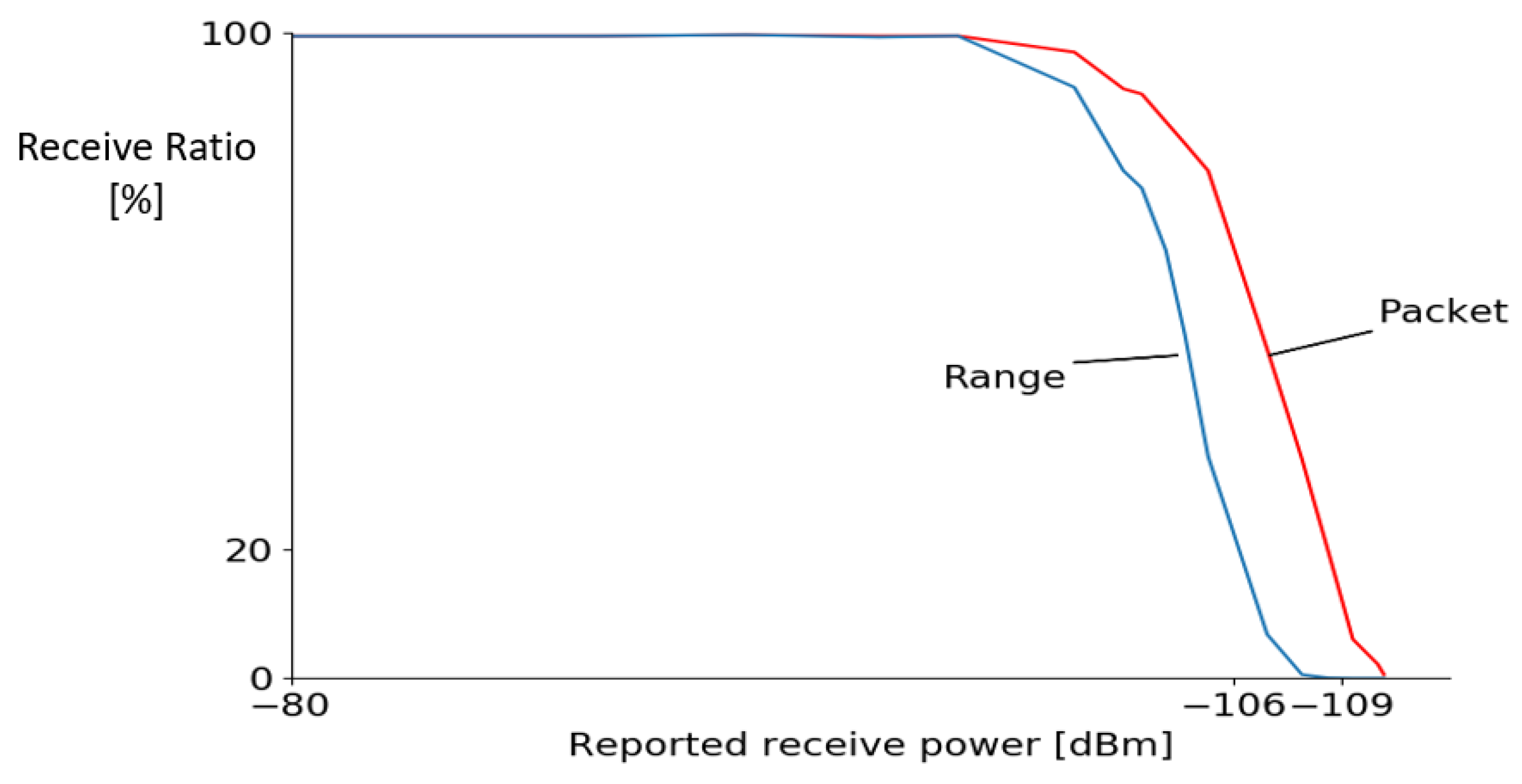
4.2. Receiver Sensitivity, Link Margin, and Packet Receive Ratio
4.3. Ranging Accuracy
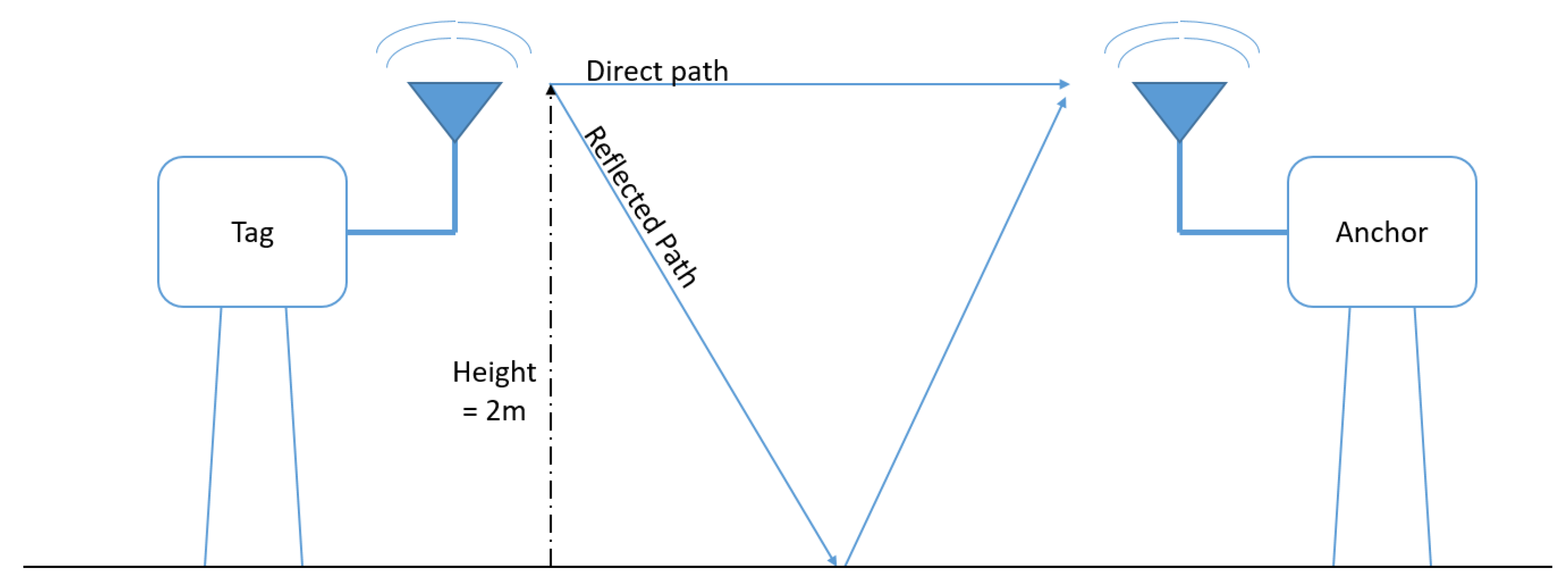
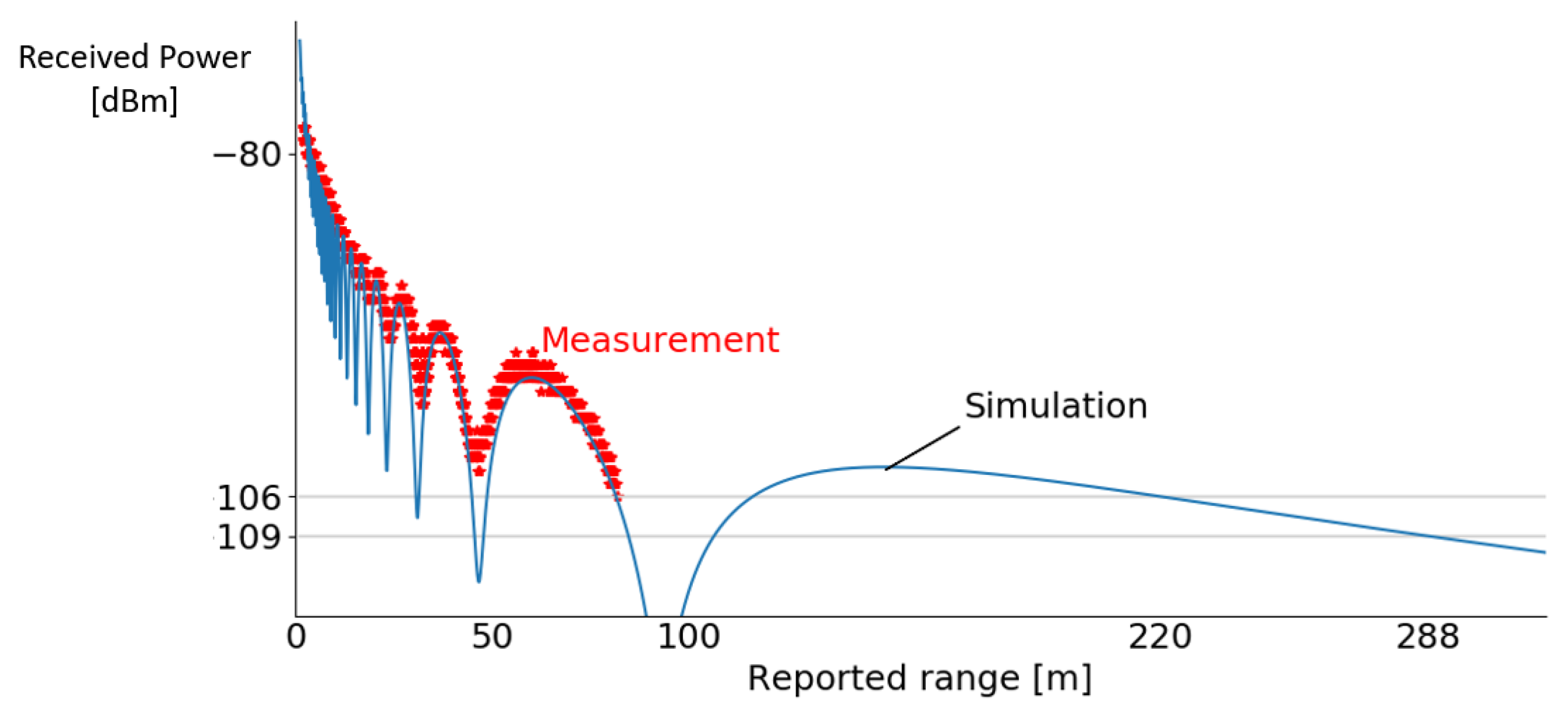
4.3.1. Theoretical Simulation Model
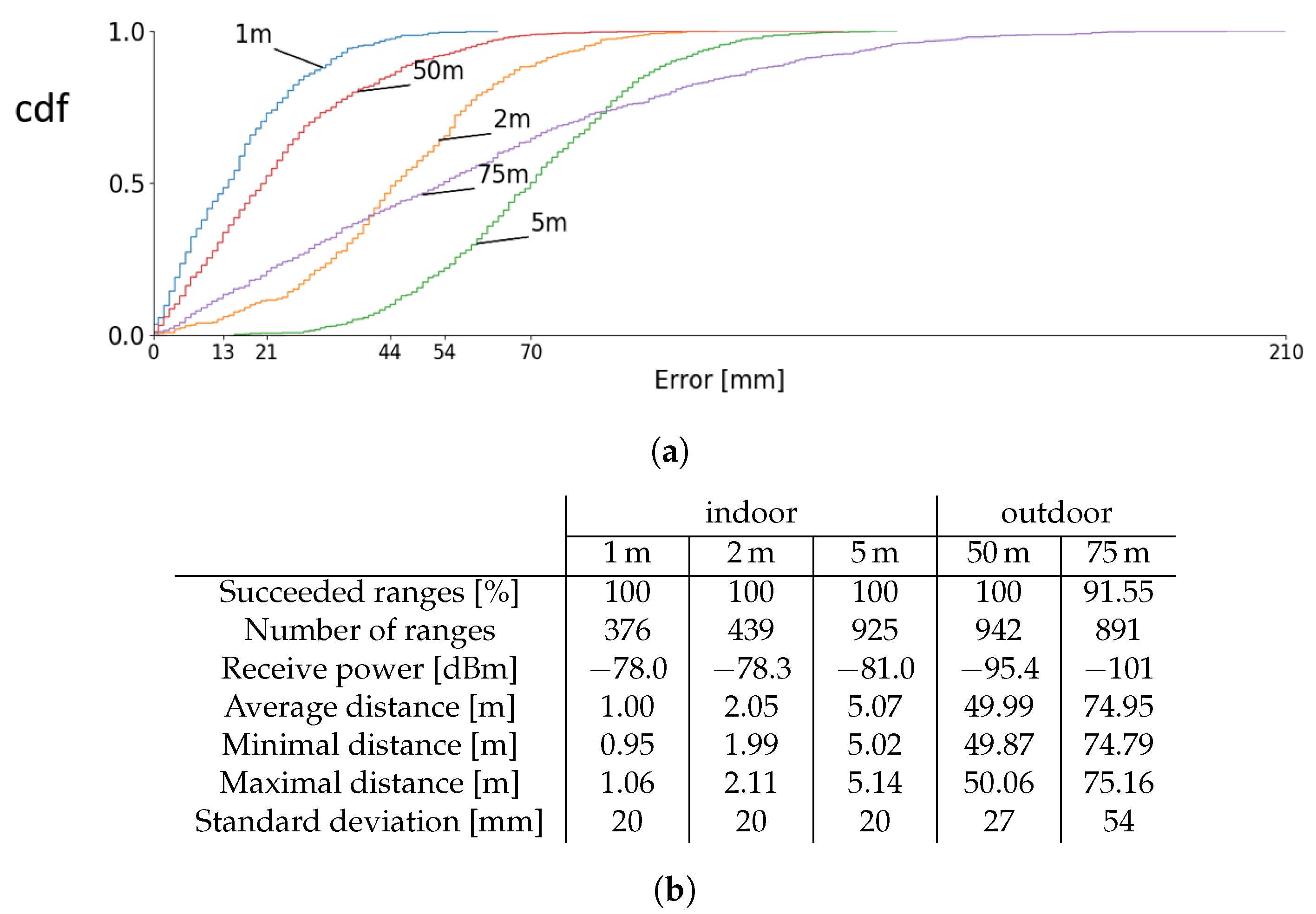
4.3.2. Indoor Short Range Test
4.3.3. Outdoor Long Range Test
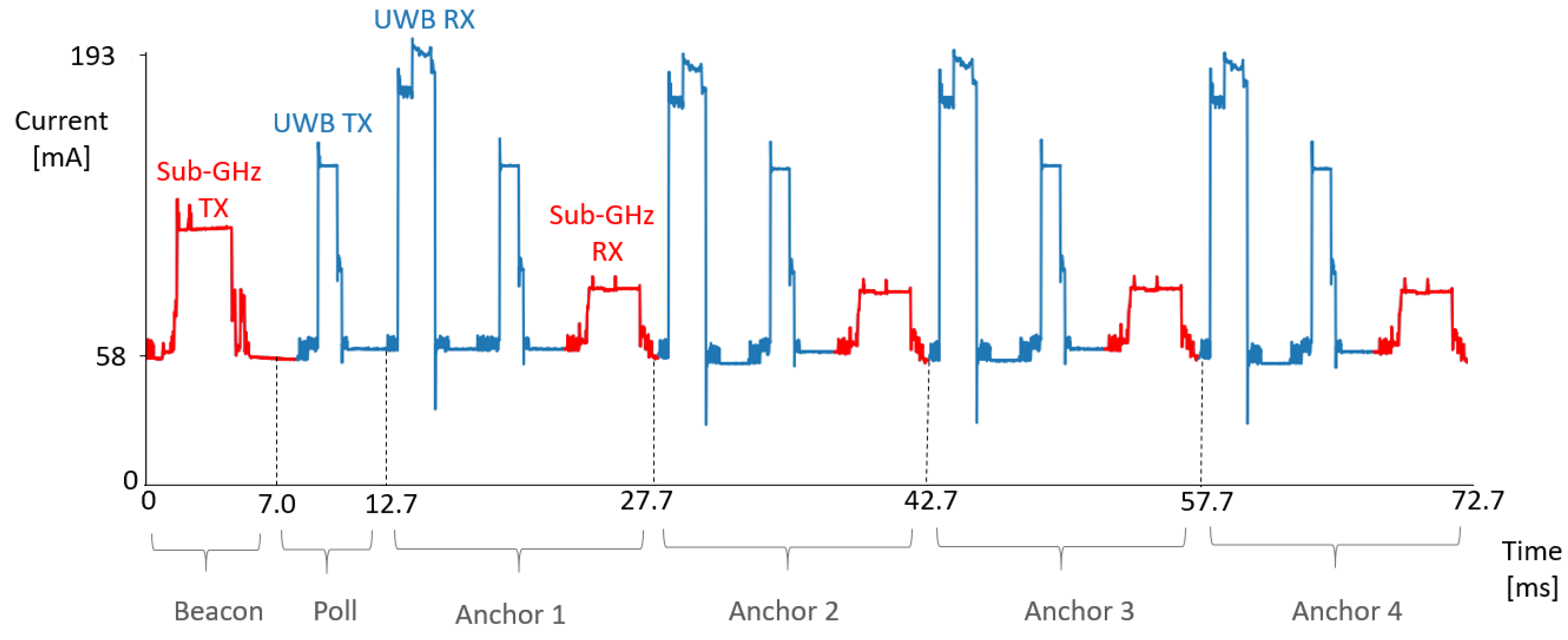
4.4. Energy Measurements
4.5. Production Cost
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kalghatgi, A.T. Challenges in the Design of an Impulse Radio Based Ultra Wide Band Transceiver. In Proceedings of the 2007 International Conference on Signal Processing, Communications and Networking, Chennai, India, 22–24 February 2007; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, H.; Yang, L. Ultra-wideband technology: Yesterday, today, and tomorrow. In Proceedings of the 2008 IEEE Radio and Wireless Symposium, Orlando, FL, USA, 22–24 January 2008; pp. 715–718. [Google Scholar] [CrossRef]
- Van den Brande, Q.; Lemey, S.; Vanfleteren, J.; Rogier, H. Highly Efficient Impulse-Radio Ultra-Wideband Cavity-Backed Slot Antenna in Stacked Air-Filled Substrate Integrated Waveguide Technology. IEEE Trans. Antennas Propag. 2018, 66, 2199–2209. [Google Scholar] [CrossRef] [Green Version]
- Wiesbeck, W.; Adamiuk, G.; Sturm, C. Basic Properties and Design Principles of UWB Antennas. Proc. IEEE 2009, 97, 372–385. [Google Scholar] [CrossRef]
- Malik, W.Q.; Stevens, C.J.; Edwards, D.J. Ultrawideband Antenna Distortion Compensation. IEEE Trans. Antennas Propag. 2008, 56, 1900–1907. [Google Scholar] [CrossRef]
- Ridolfi, M.; de Velde, S.V.; Steendam, H.; Poorter, E.D. WiFi ad-hoc mesh network and MAC protocol solution for UWB indoor localization systems. In Proceedings of the 2016 Symposium on Communications and Vehicular Technologies (SCVT), Mons, Belgium, 22 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Macoir, N.; Ridolfi, M.; Rossey, J.; Moerman, I.; De Poorter, E. MAC protocol for supporting multiple roaming users in multi-cell UWB localization networks. In Proceedings of the 2018 IEEE 19th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Chania, Greece, 12–15 June 2018; pp. 1–7. [Google Scholar]
- Jooris, B.; Bauwens, J.; Ruckebusch, P.; De Valck, P.; Van Praet, C.; Moerman, I.; De Poorter, E. TAISC: A cross-platform MAC protocol compiler and execution engine. Comput. Netw. 2016, 107, 315–326. [Google Scholar] [CrossRef]
- University, G. Our System. 2019. Available online: https://gitlab.ilabt.imec.be/openuwb (accessed on 7 February 2019).
- Kempke, B.; Pannuto, P.; Campbell, B.; Dutta, P. PolyPoint: Guiding Indoor Quadtrotors with Ultra-Wideband Localization. In Proceedings of the 2015 ACM Workshop on Hot Topics in Wireless, HotWireless’15, Paris, France, 11 September 2015. [Google Scholar]
- Tiemann, J.; Eckermann, F.; Wietfeld, C. Atlas—An open-source TDOA-based Ultra-wideband localization system. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Ltd., Decawave Application Notes. Available online: https://www.decawave.com/application-notes/ (accessed on 10 October 2018).
- Tiemann, J. hw-Atlas: Hardware Design Files. 2016. doi:10.5281/zenodo.61464. Available online: https://zenodo.org/record/61464#.XJ2Co7h5uUk (accessed on 6 September 2018). [CrossRef]
- Tiemann, J. cpp-atlas: Localization Server. 2016. doi:10.5281/zenodo.61465. Available online: https://zenodo.org/record/61465#.XJ2C-Lh5uUk (accessed on 6 September 2018). [CrossRef]
- Trojer, T. ArduinoDW1000. 2018. Available online: https://github.com/thotro/arduino-dw1000 (accessed on 6 September 2018).
- Van den Bossche, A.; Dalcé, R.; Fofana, I.; Val, T. DecaDuino: An open framework for Wireless Time-of-Flight ranging systems. In Proceedings of the 2016 Wireless Days (WD), Toulouse, France, 23–25 March 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Cheekiang. uwb_localization. 2016. Available online: https://github.com/cheekiang/uwb_localization (accessed on 6 September 2018).
- KitSprout. KitSprout KDWM1000. 2017. Available online: https://github.com/cheekiang/uwb_localization (accessed on 6 September 2018).
- Domazetović, B.; Kočan, E.; Mihovska, A. Performance Evaluation of IEEE 802.11ah Systems. In Proceedings of the 2016 24th Telecommunications Forum (TELFOR), Belgrade, Serbia, 22–23 November 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S. Comparing Ubisense, BeSpoon, and DecaWave UWB Location Systems: Indoor Performance Analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F. Comparing Decawave and Bespoon UWB location systems: Indoor/outdoor performance analysis. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Wang, J.; Raja, A.K.; Pang, Z. Prototyping and Experimental Comparison of IR-UWB Based High Precision Localization Technologies. In Proceedings of the 2015 IEEE 12th International Conference on Ubiquitous Intelligence and Computing and 2015 IEEE 12th Intl Conf on Autonomic and Trusted Computing and 2015 IEEE 15th Intl Conf on Scalable Computing and Communications and Its Associated Workshops (UIC-ATC-ScalCom), Beijing, China, 10–14 August 2015; pp. 1187–1192. [Google Scholar] [CrossRef]
- Zolertia. Zolertia RE-Mote Revision B, 1.0.0 ed. 2016. Available online: https://github.com/Zolertia/Resources/tree/master/RE-Mote/Hardware/Revision (accessed on 15 February 2019).
- Ridolfi, M.; Vandermeeren, S.; Defraye, J.; Steendam, H.; Gerlo, J.; De Clercq, D.; Hoebeke, J.; De Poorter, E. Experimental Evaluation of UWB Indoor Positioning for Sport Postures. Sensors 2018, 18, 168. [Google Scholar] [CrossRef] [PubMed]
- MQTT. 2019. Available online: http://mqtt.org/ (accessed on 7 February 2019).
- Contiki-ng. 2019. Available online: https://github.com/contiki-ng (accessed on 7 February 2019).
- Jiang, Y.; Leung, V.C.M. An Asymmetric Double Sided Two-Way Ranging for Crystal Offset. In Proceedings of the 2007 International Symposium on Signals, Systems and Electronics, Montréal, QC, Canada, 30 July–2 August 2007; pp. 525–528. [Google Scholar] [CrossRef]
- Macoir, N.; Bauwens, J.; Jooris, B.; Van Herbruggen, B.; Rossey, J.; Hoebeke, J.; De Poorter, E. UWB Localization with Battery-Powered Wireless Backbone for Drone-Based Inventory Management. Sensors 2019, 19, 467. [Google Scholar] [CrossRef] [PubMed]
- Octoscope. QuadAtten Programmable Attenuator Datasheet. Available online: https://www.octoscope.com/English/Collaterals/Documents/octoBox_quadAtten_datasheet.pdf (accessed on 7 October 2018).
- Ghassemzadeh, S.S.; Greenstein, L.J.; Kavcic, A.; Sveinsson, T.; Tarokh, V. UWB indoor path loss model for residential and commercial buildings. In Proceedings of the 2003 IEEE 58th Vehicular Technology Conference. VTC 2003-Fall (IEEE Cat. No.03CH37484), Orlando, FL, USA, 6–9 October 2003; Volume 5, pp. 3115–3119. [Google Scholar] [CrossRef]
- Richardson, P.C.; Xiang, W.; Stark, W. Modeling of ultra-wideband channels within vehicles. IEEE J. Sel. Areas Commun. 2006, 24, 906–912. [Google Scholar] [CrossRef]
- Molisch, A.F.; Cassioli, D.; Chong, C.; Emami, S.; Fort, A.; Kannan, B.; Karedal, J.; Kunisch, J.; Schantz, H.G.; Siwiak, K.; et al. A Comprehensive Standardized Model for Ultrawideband Propagation Channels. IEEE Trans. Antennas Propag. 2006, 54, 3151–3166. [Google Scholar] [CrossRef] [Green Version]
- Keysight Technologies. Keysight N6705 User’s Guide; Keysight Technologies: Santa Rosa, CA, USA, 2015. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Academic/Commercial | External Antenna | Extra Radio | Open Source | ||
|---|---|---|---|---|---|---|
| HW | Localization Algorithm | IoT Network Stack | ||||
| PolyPoint [10] | academic | ✓(BLE) | ✓ | ✓ | ||
| Atlas [13,14] | academic | ✓ | ✓ | |||
| Arduino DW1000 [15] | academic | ✓ | ||||
| DecaDuino [16] | academic | ✓ | ||||
| KDWM1000 [18] | academic | ✓ | ✓ | |||
| uwb_localization [17] | academic | ✓(Arduino Mini) | ✓ | |||
| EVB1000 [12] | commercial | ✓ | ||||
| Wi-PoS | academic | ✓ | ✓(sub-GHz and 2.4 GHz) | ✓ | ✓ | ✓ |
| Dimensions | 40.29 × 70 × 1.568 mm3 |
| Stack | 4 layers |
| Printed circuit board (PCB) material | RO4350B and PR2116 |
| Antenna interfacing | SMA connector |
| UWB transceiver | DW1000 |
| Crystal oscillator | 402F38411CAR (CTS-Frequency Controls) [±10 ppm] |
| Balun | HHM1595A1 |
| Power | USB-C (5.0 V) |
| Current [mA] | Time Tag [ms] | Tag [%] | Time Anchor [ms] | Anchor [%] | Time Anchor (No-Slot) [ms] | Time Anchor (No-Slot) [%] | |
|---|---|---|---|---|---|---|---|
| UWB RX preamble hunt | 177 | 1.724 | 2.4 | 0.431 | 0.6 | 0 | 0.0 |
| UWB RX | 193 | 5.6 | 7.7 | 2.5 | 3.4 | 0 | 0.0 |
| UWB TX | 140 | 3.41 | 4.7 | 0.682 | 0.9 | 0 | 0.0 |
| sub-GHz TX | 106 | 4.2 | 5.8 | 2 | 2.8 | 0 | 0.0 |
| sub-GHz RX | 80 | 8 | 11.0 | 4.2 | 5.8 | 4.2 | 5.8 |
| IDLE | 58 | 49.766 | 68.5 | 62.9 | 86.5 | 68.5 | 94.2 |
| TX Gain | 0 dB | 12.5 dB | 33.5 dB |
|---|---|---|---|
| tag | 80.53 mA | 81.19 mA | 83.40 mA |
| anchor (1-slot) | 63.16 mA | 63.29 mA | 63.73 mA |
| anchor (no-slot) | 47.98 mA | 47.98 mA | 47.98 mA |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van Herbruggen, B.; Jooris, B.; Rossey, J.; Ridolfi, M.; Macoir, N.; Van den Brande, Q.; Lemey, S.; De Poorter, E. Wi-PoS: A Low-Cost, Open Source Ultra-Wideband (UWB) Hardware Platform with Long Range Sub-GHz Backbone. Sensors 2019, 19, 1548. https://doi.org/10.3390/s19071548
Van Herbruggen B, Jooris B, Rossey J, Ridolfi M, Macoir N, Van den Brande Q, Lemey S, De Poorter E. Wi-PoS: A Low-Cost, Open Source Ultra-Wideband (UWB) Hardware Platform with Long Range Sub-GHz Backbone. Sensors. 2019; 19(7):1548. https://doi.org/10.3390/s19071548
Chicago/Turabian StyleVan Herbruggen, Ben, Bart Jooris, Jen Rossey, Matteo Ridolfi, Nicola Macoir, Quinten Van den Brande, Sam Lemey, and Eli De Poorter. 2019. "Wi-PoS: A Low-Cost, Open Source Ultra-Wideband (UWB) Hardware Platform with Long Range Sub-GHz Backbone" Sensors 19, no. 7: 1548. https://doi.org/10.3390/s19071548
APA StyleVan Herbruggen, B., Jooris, B., Rossey, J., Ridolfi, M., Macoir, N., Van den Brande, Q., Lemey, S., & De Poorter, E. (2019). Wi-PoS: A Low-Cost, Open Source Ultra-Wideband (UWB) Hardware Platform with Long Range Sub-GHz Backbone. Sensors, 19(7), 1548. https://doi.org/10.3390/s19071548