MuCHLoc: Indoor ZigBee Localization System Utilizing Inter-Channel Characteristics †

 ,
,
Abstract
:
1. Introduction
- We present the design of MuCHLoc, a fingerprinting sensor localization system utilizing channel diversity. MuCHLoc measures the RSS of Wi-Fi APs on multiple ZigBee channels and extracts channel-specific features at the location to improve the localization accuracy. To the best of our knowledge, this is the first attempt at developing a sensor localization system employing cross-technology multi-channel RSS measurements deriving the channel diversity.
- We evaluate MuCHLoc using sensor nodes and Wi-Fi APs deployed in a practical environment. We demonstrate that MuCHLoc improves the localization accuracy compared to localization without channel diversity.
- We experimentally confirm that MuCHLoc is effective in a dynamic radio environment where the radio propagation channel is unstable owing to the presence of moving objects including humans.
2. Related Work
2.1. Indoor Sensor Localization
2.2. Accuracy Improvement Using Channel Diversity
3. MuCHLoc
3.1. Key Idea
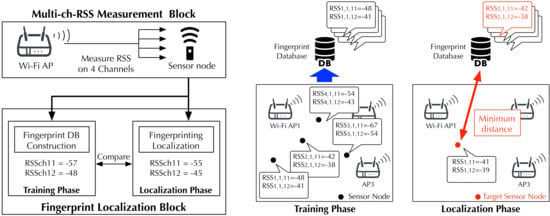
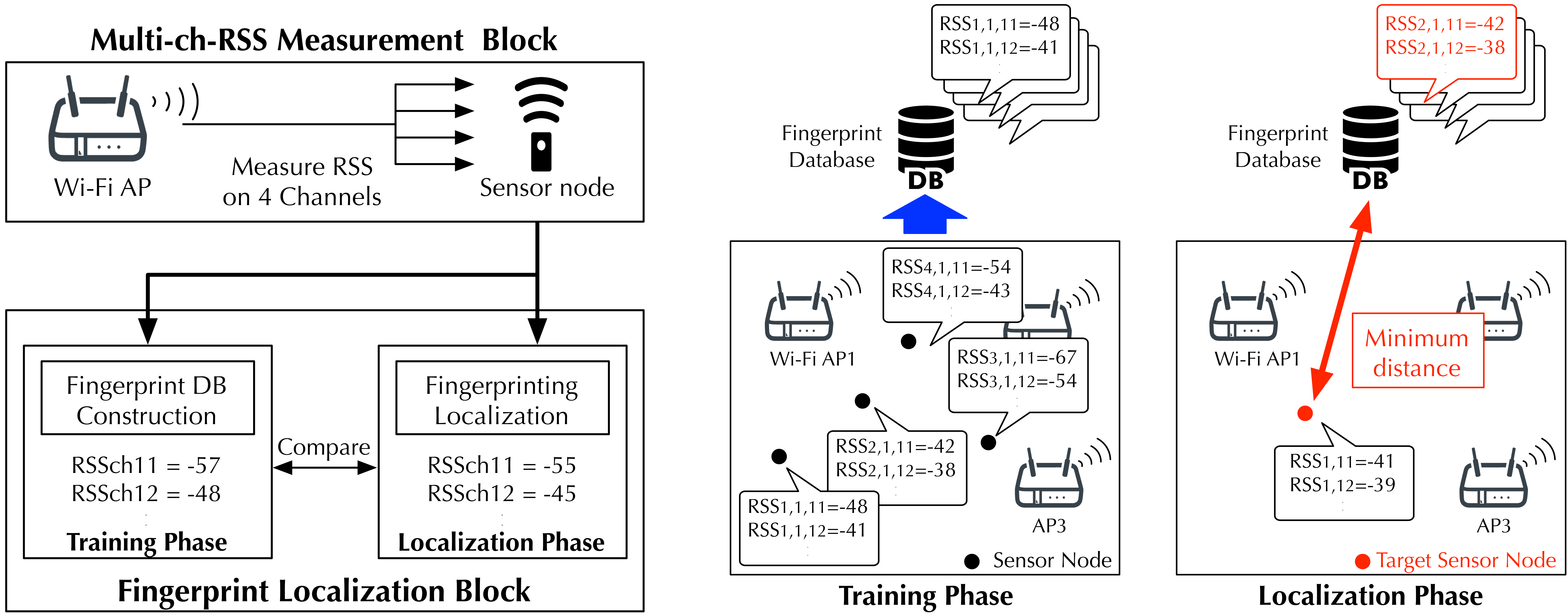
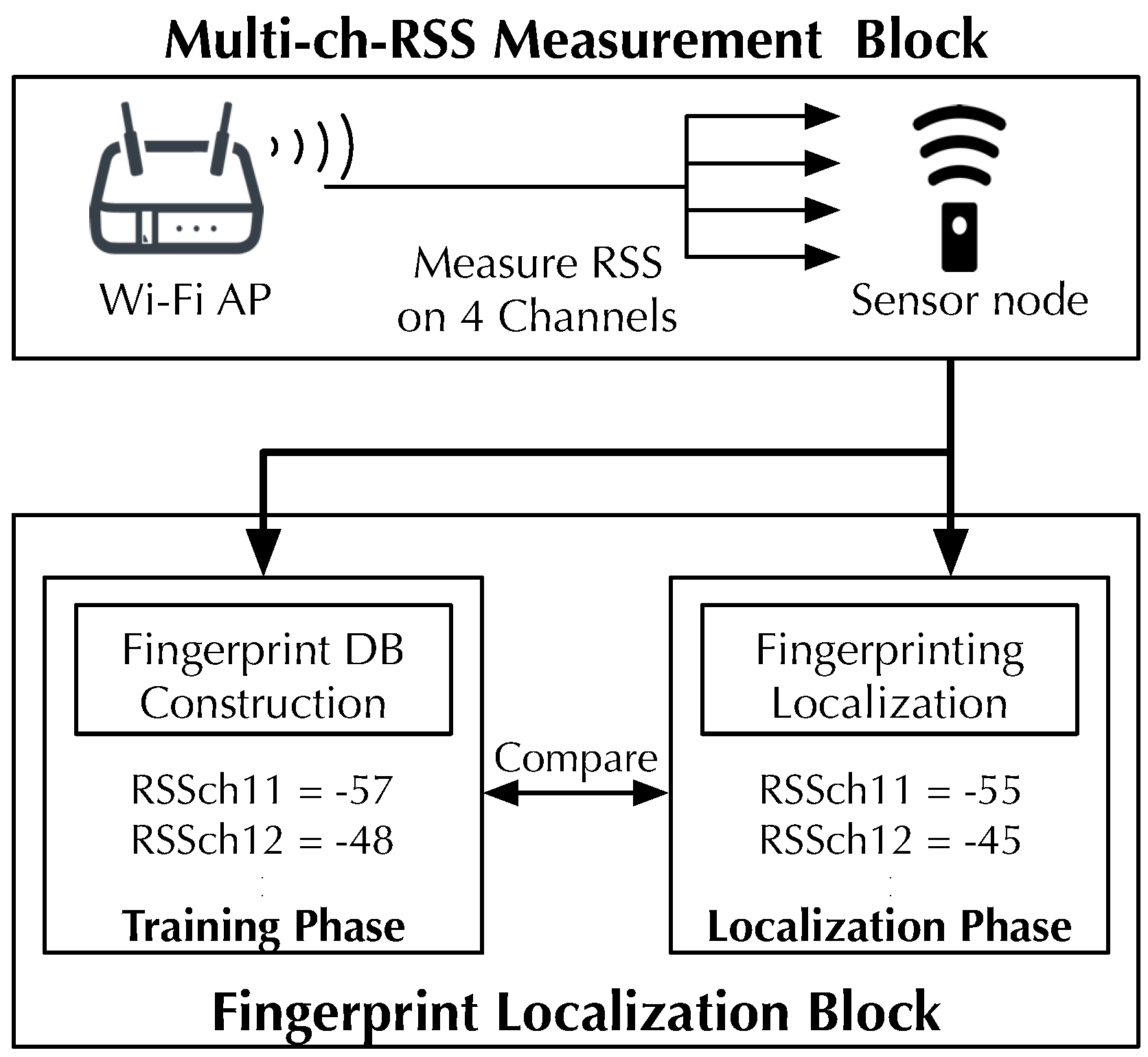
3.2. Design Overview
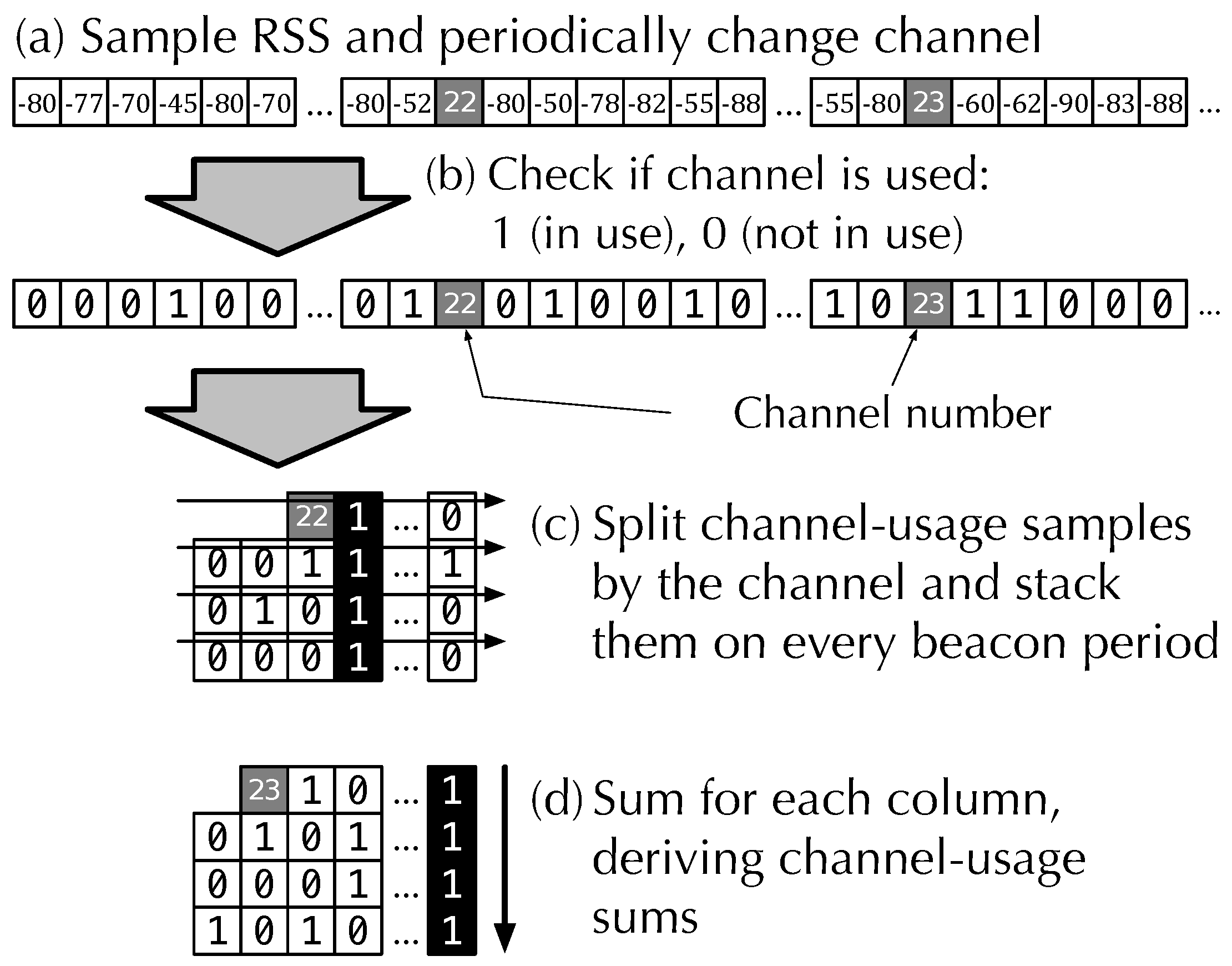
3.3. Multi-ch-RSS Measurement Block
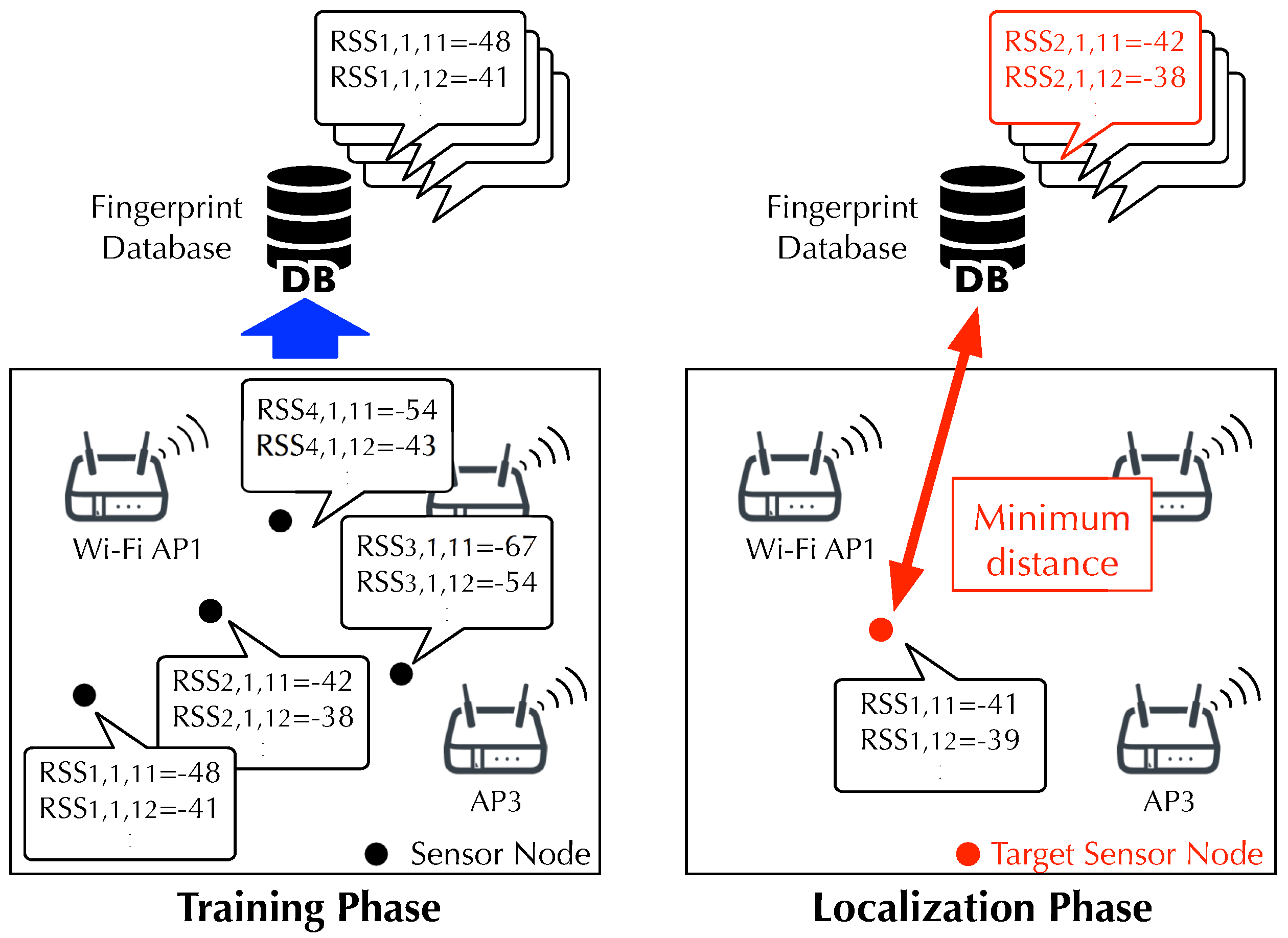
3.4. Fingerprint Localization Block
4. Evaluation
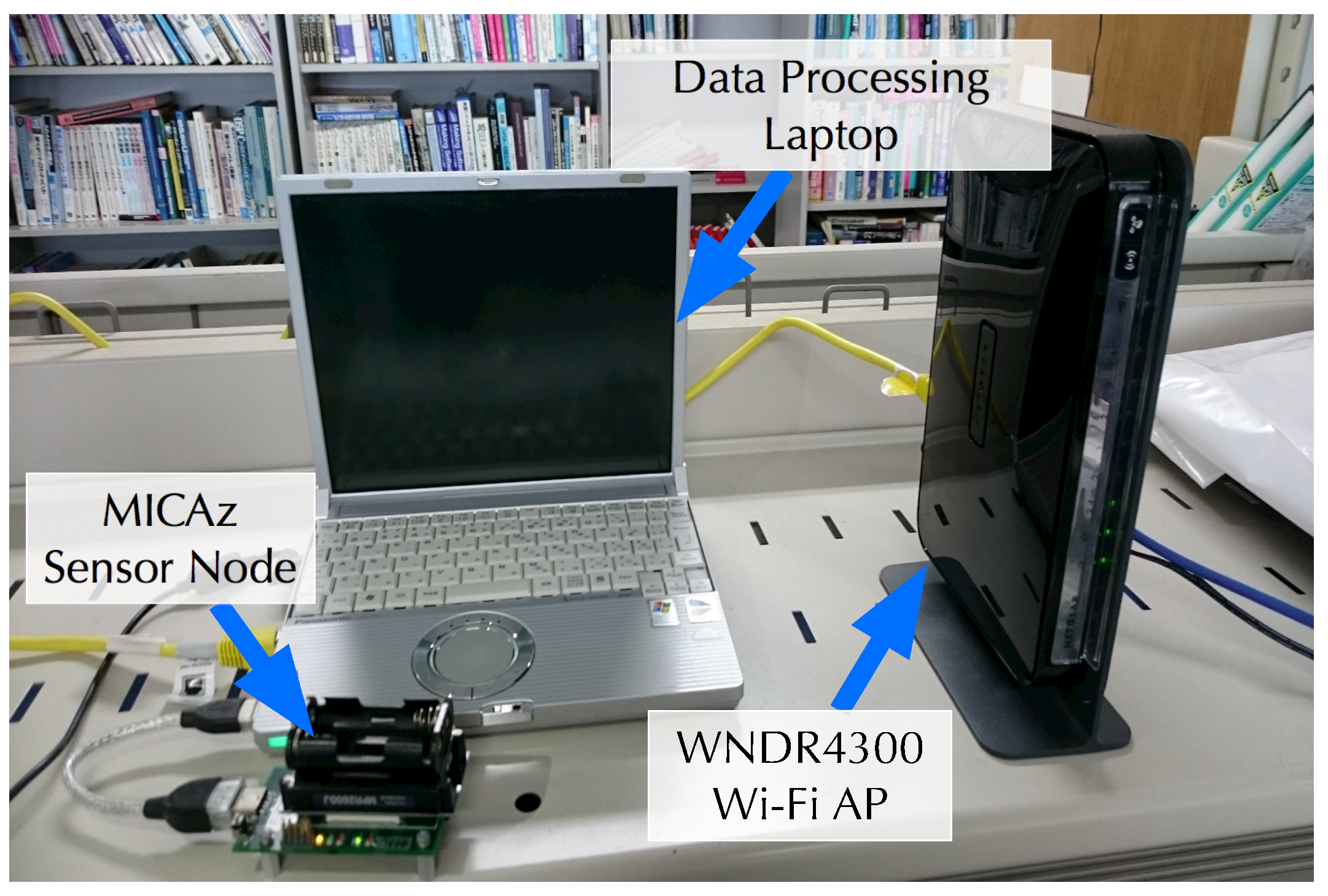
4.1. Implementation
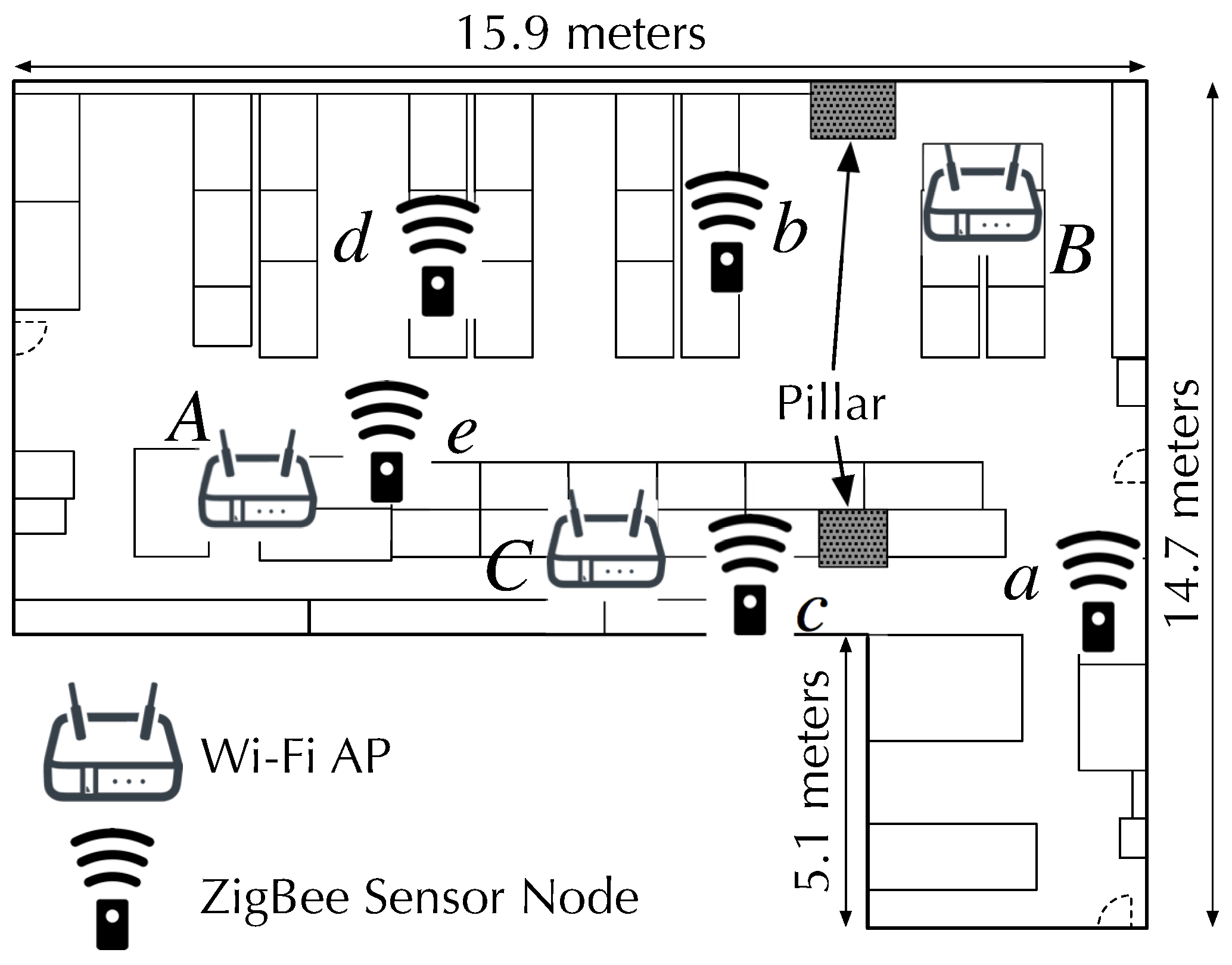
4.2. Experiment Environment
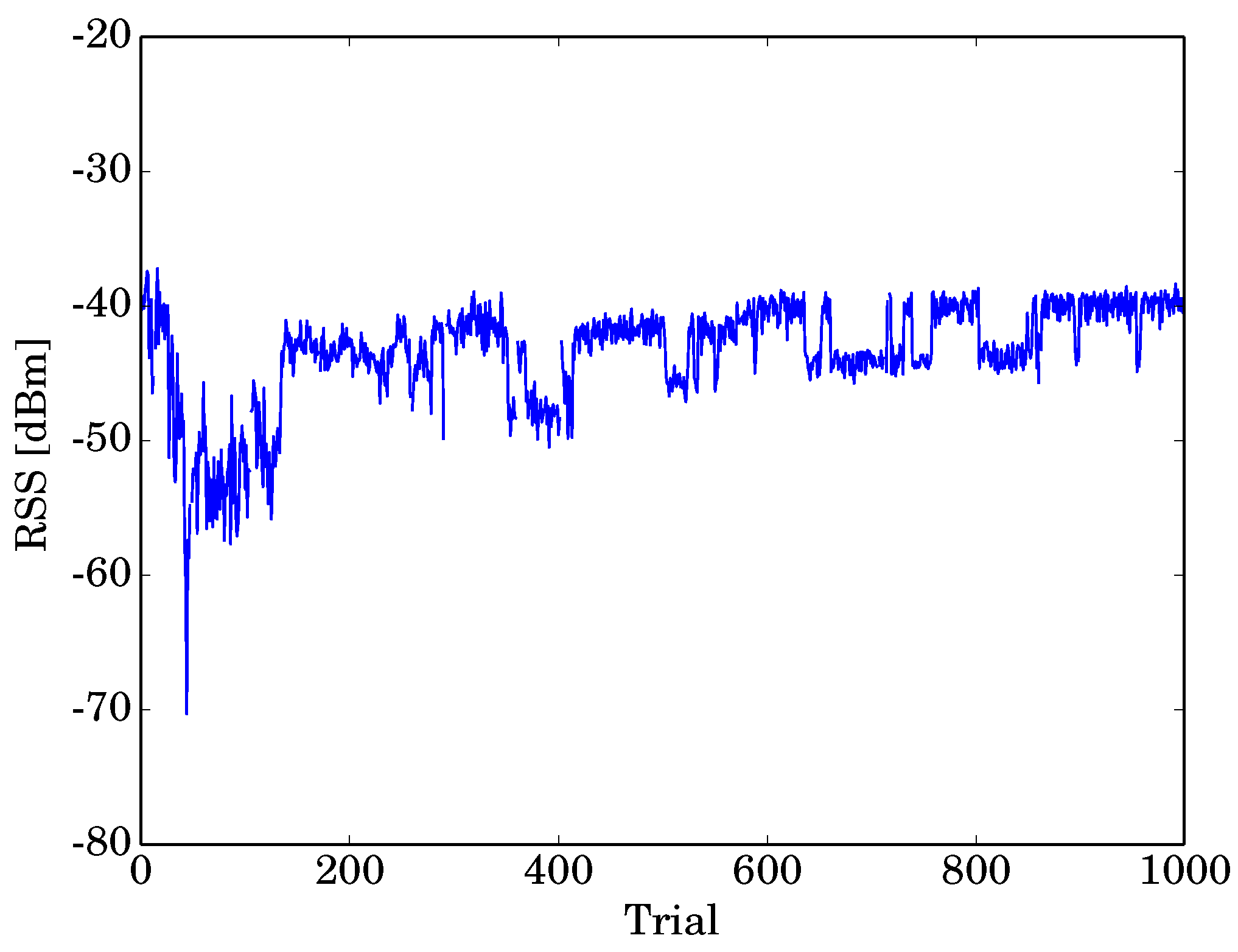
- We validated two key observations upon which MuCHLoc relies as the preliminary experiments. First, we validated the RSS instability, which implies the difficulty of indoor localization in our environment. We next validated the channel diversity, which is a key observation in MuCHLoc to improve the localization accuracy. We applied Welch’s two-sample t-tests to confirm the RSS difference on different ZigBee channels at different locations.
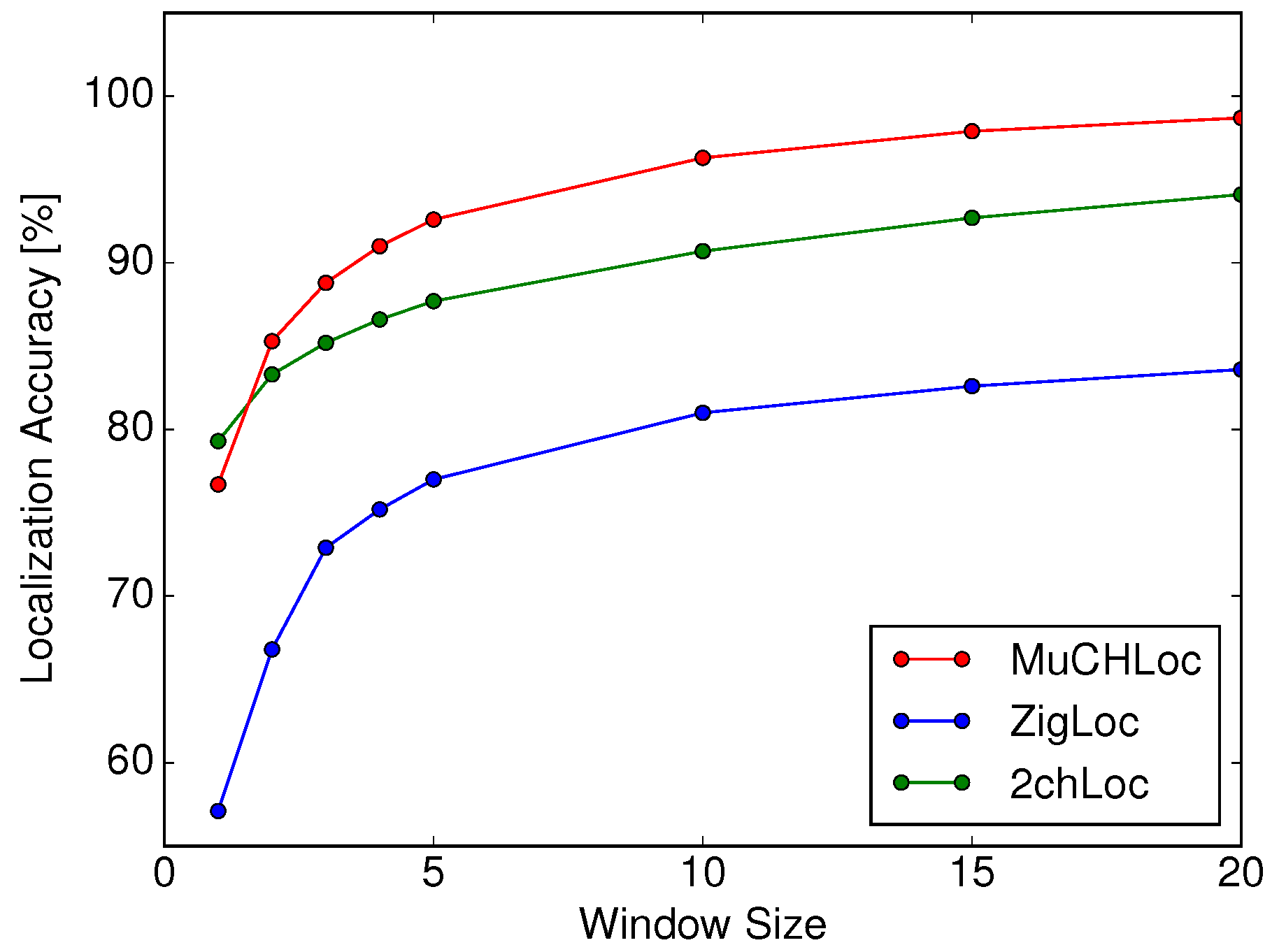
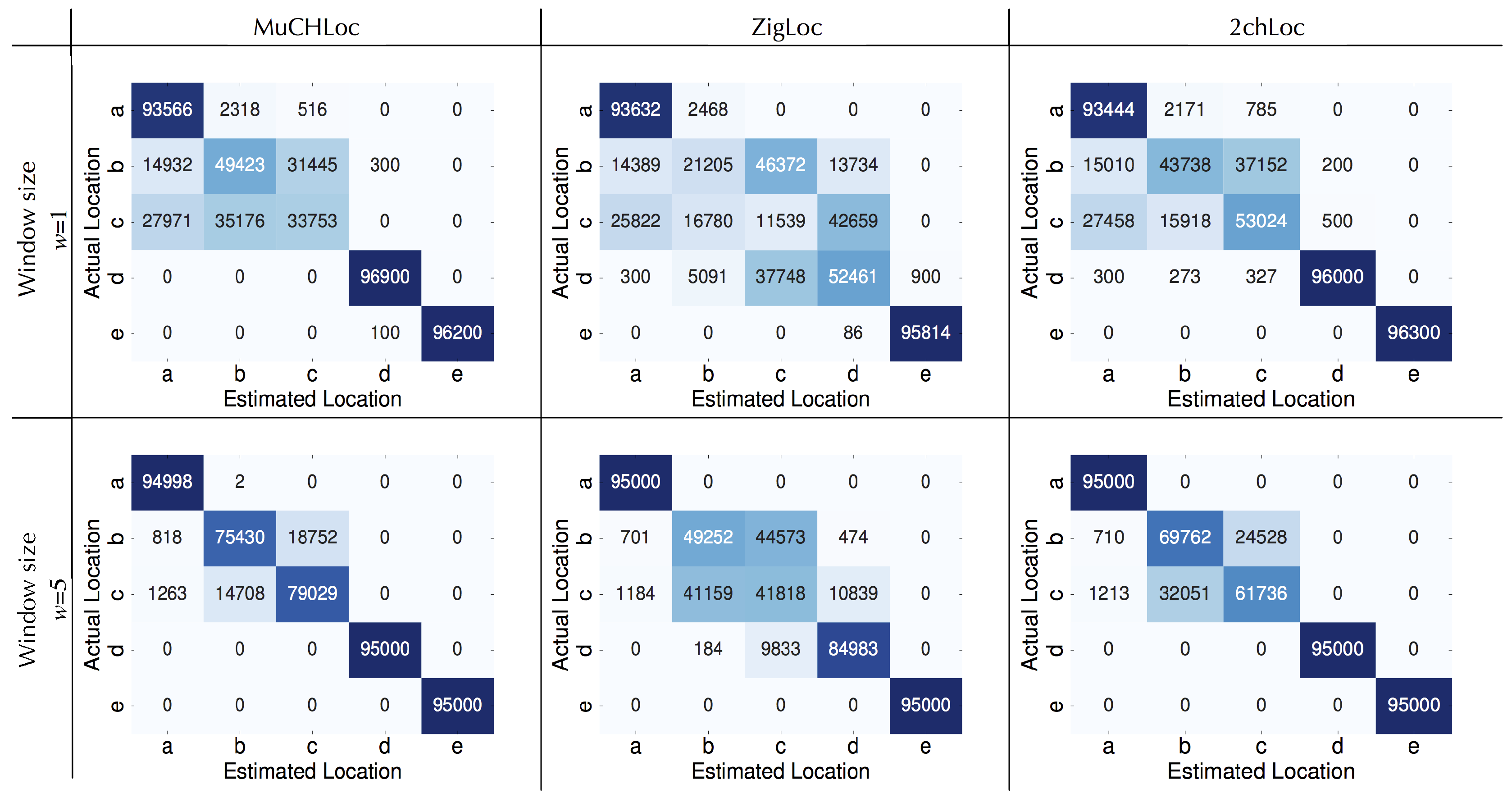
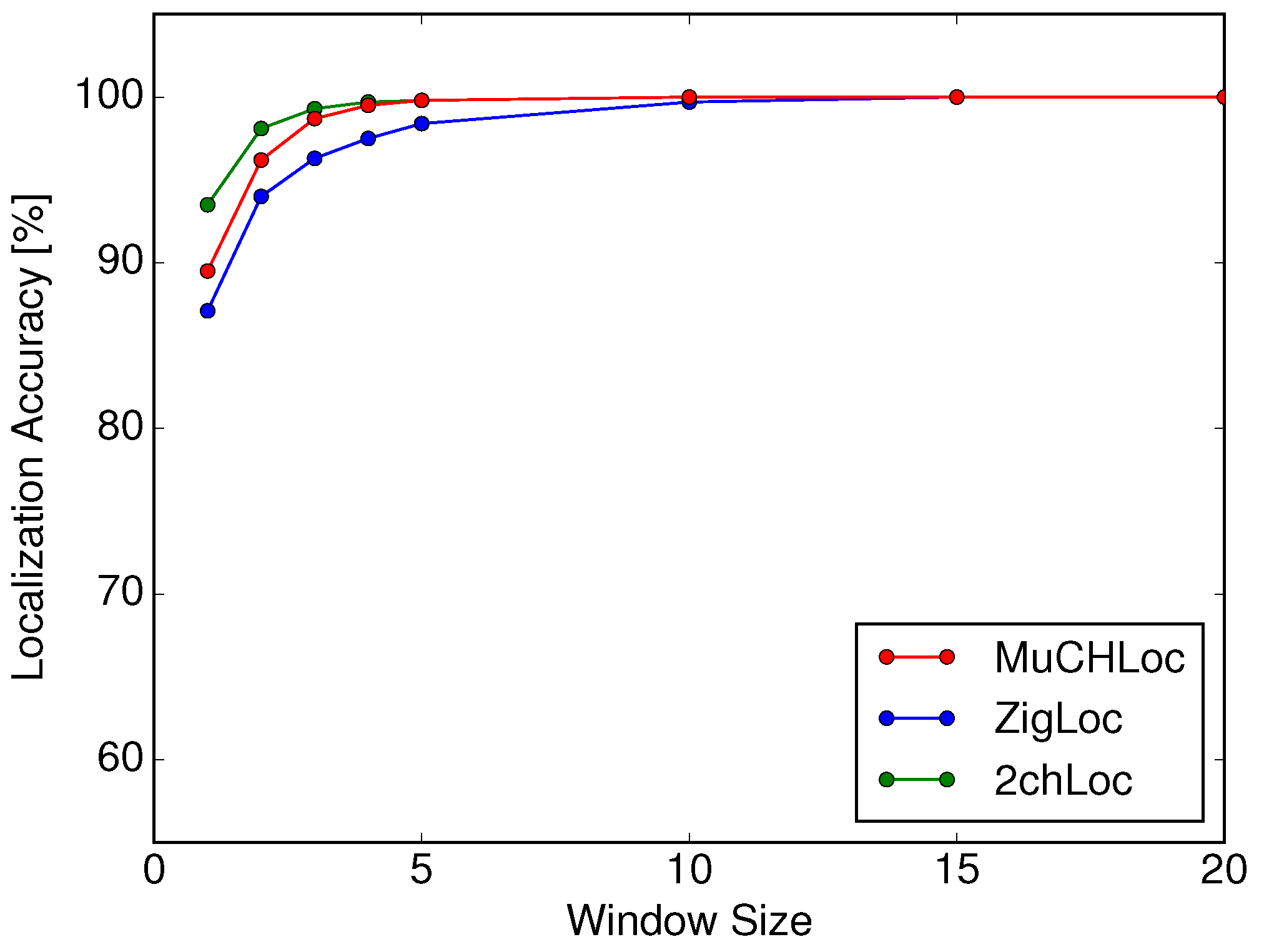
- We validated the localization accuracy of MuCHLoc using a 10-fold leave-one-out cross validation. We repeated the cross validation 100 times with shuffled data to estimate the sensor location within the five labeled locations and evaluated the localization accuracy.
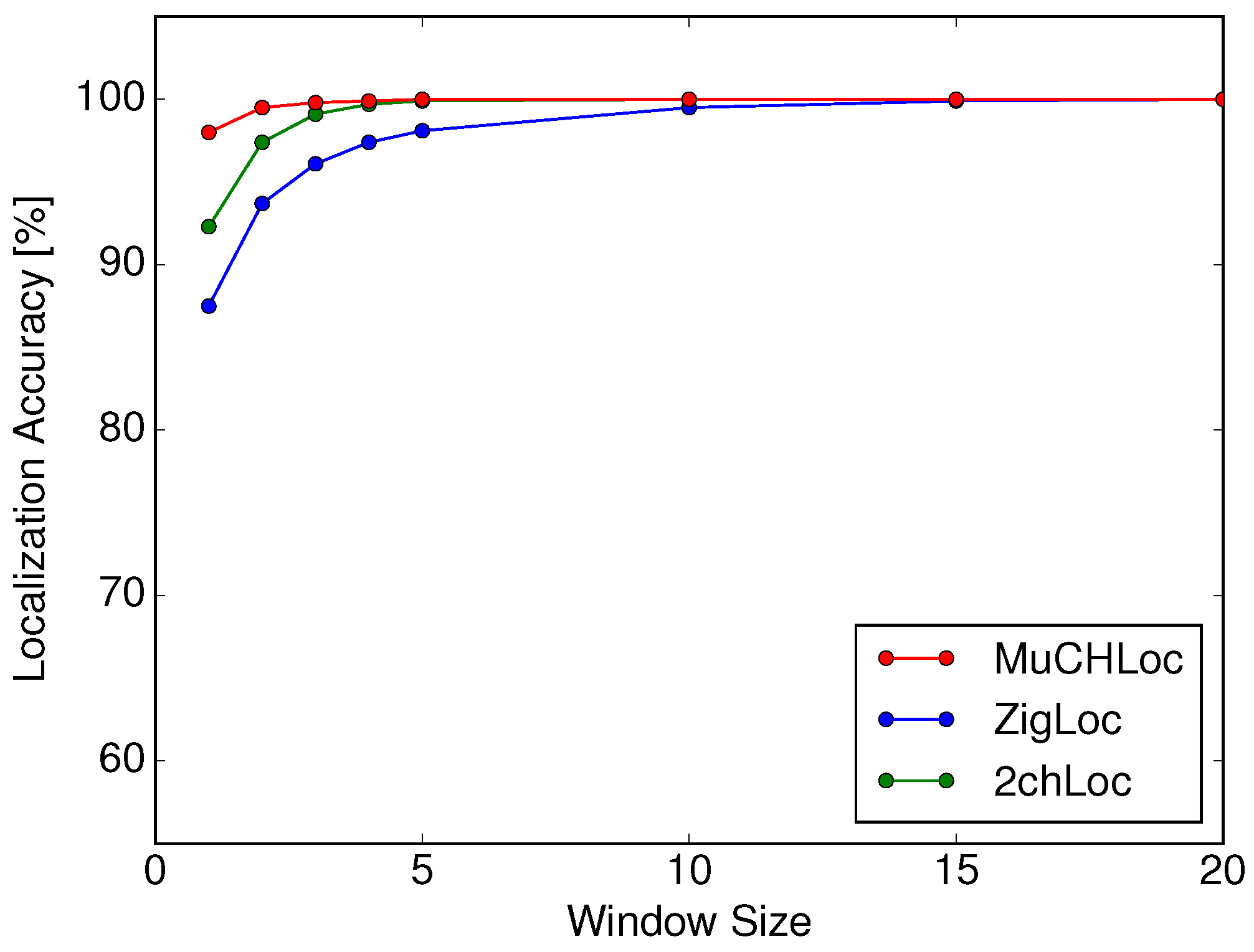
- We validated the effectiveness of MuCHLoc in a dynamic radio propagation environment. We compared the localization accuracy between dynamic and static environments.
- We validated the localization accuracy of MuCHLoc using multiple APs. The RSS samples from three APs were collected. We then evaluated the localization accuracy using RSS samples from multiple APs in the same way as with a single AP.
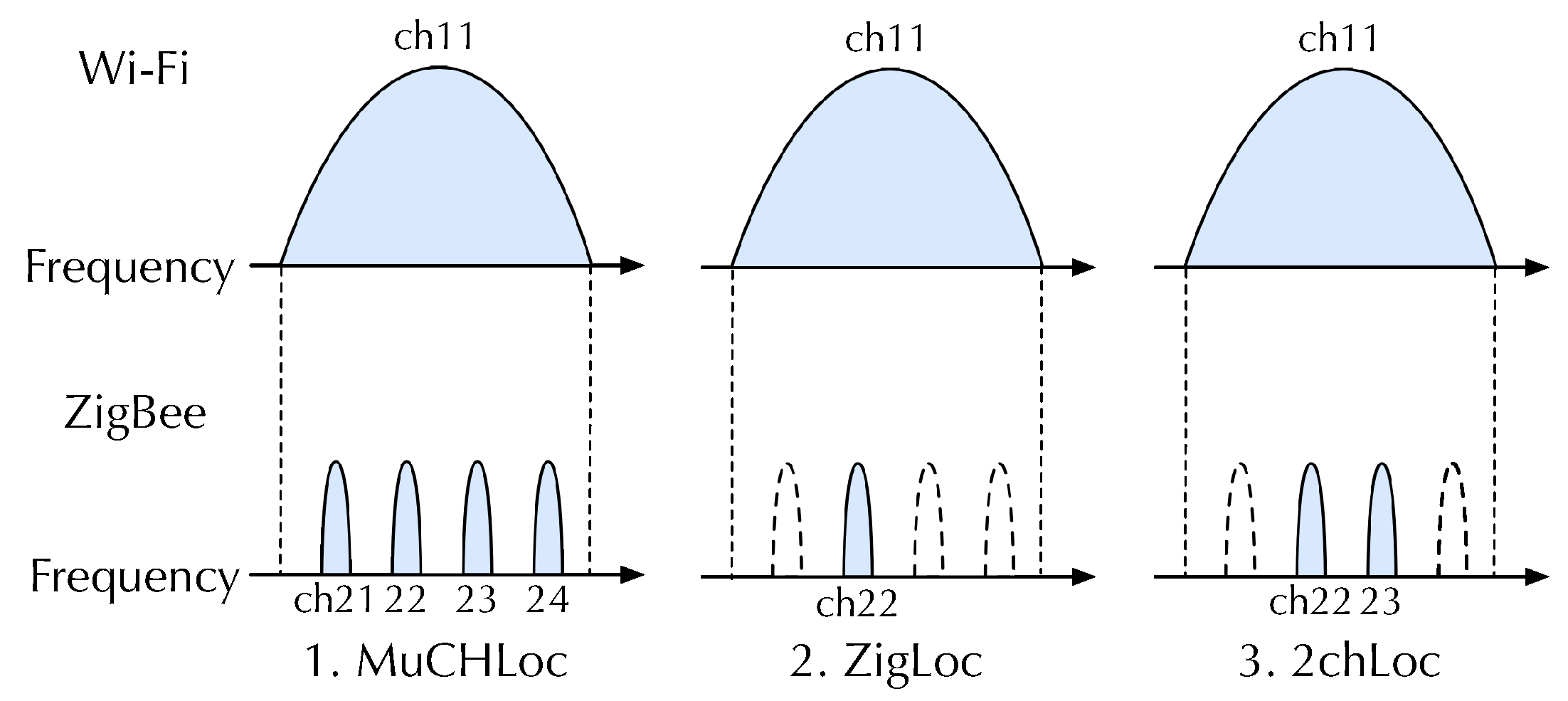
- MuCHLoc: MuCHLoc is the proposed method described in Section 3, which utilizes channel diversity derived from the RSS of wide-band Wi-Fi AP signals during fingerprinting.
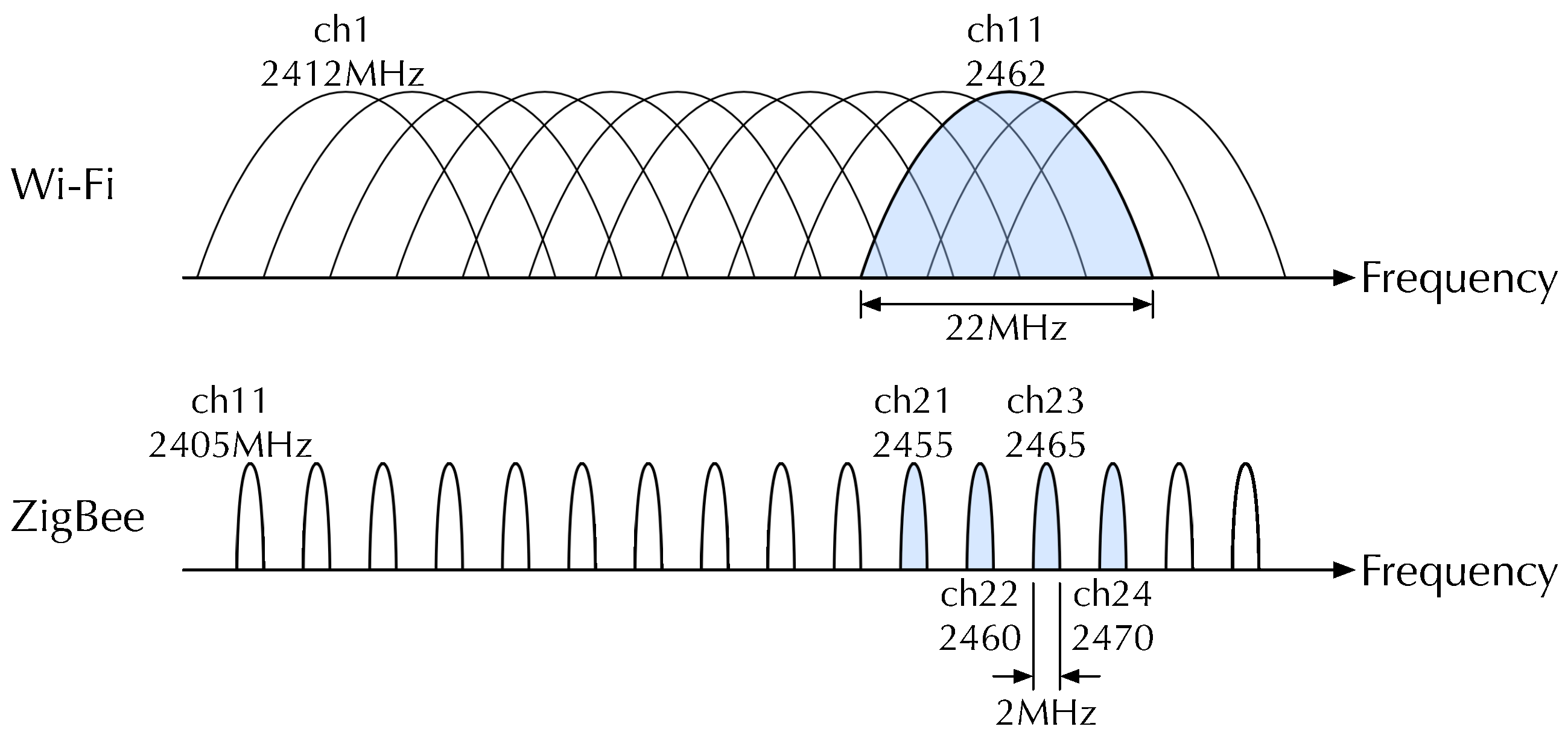
- 2chLoc: 2chLoc is a fingerprinting method utilizing channel diversity on a limited number of channels. AP-RSS is measured on two ZigBee channels overlapping at the center of a Wi-Fi AP operating channel.
4.3. Preliminary Experiments
4.4. Localization Accuracy
4.5. Localization Accuracy in Dynamic and Static Environments
4.6. Localization Accuracy Using Multiple APs
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, J.; Ghosh, R.K.; Das, S.K. A survey on sensor localization. J. Control Theory Appl. 2010, 8, 2–11. [Google Scholar] [CrossRef]
- Cheng, L.; Wu, C.; Zhang, Y.; Wu, H.; Li, M.; Maple, C. A Survey of Localization in Wireless Sensor Network. Int. J. Distrib. Sens. Netw. 2012, 8, 1–12. [Google Scholar] [CrossRef]
- Lédeczi, A.; Maróti, M. Wireless Sensor Node Localization. Philos. Trans. R. Soc. A 2012, 370, 85–99. [Google Scholar] [CrossRef] [PubMed]
- Kushki, A.; Plataniotis, K.N.; Venetsanopoulos, A.N. Intelligent Dynamic Radio Tracking in Indoor Wireless Local Area Networks. IEEE Trans. Mob. Comput. 2010, 9, 405–419. [Google Scholar] [CrossRef]
- Kaemarungsi, K.; Krishnamurthy, P. Analysis of WLAN’s received signal strength indication for indoor location fingerprinting. Pervasive Mob. Comput. 2012, 8, 292–316. [Google Scholar] [CrossRef]
- Sen, S.; Radunović, B.; Choudhury, R.R.; Minka, T. You are Facing the Mona Lisa: Spot Localization using PHY Layer Information. In Proceedings of the ACM International Conference on Mobile Systems, Applications, and Services (MobiSys), Low Wood Bay, Lake District, UK, 25–29 June 2012; pp. 183–196. [Google Scholar]
- Wirström, N.; Misra, P.; Voigt, T. Spray: A Multi-Modal Localization System for Stationary Sensor Network Deployment. In Proceedings of the Annual Conference on Wireless On-Demand Network Systems and Services (WONS), Obergurgl, Austria, 2–4 April 2014; pp. 25–32. [Google Scholar]
- Nagpal, R.; Shrobe, H.; Bachrach, J. Organizing a Global Coordinate System from Local Information on an Ad Hoc Sensor Network. In Lecture Notes in Computer Science (LNCS), Proceedings of the International Conference on Information Processing in Sensor Networks (IPSN), Palo Alto, CA, USA, 22–23 April 2003; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2634, pp. 333–348. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-Building RF-based User Location and Tracking System. In Proceedings of the IEEE International Conference on Computer Communications, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No Need to War-Drive: Unsupervised Indoor Localization. In Proceedings of the ACM International Conference on Mobile Systems, Applications, and Services (MobiSys), Low Wood Bay, Lake District, UK, 25–29 June 2012; pp. 197–210. [Google Scholar]
- Yang, Z.; Wu, C.; Liu, Y. Locating in Fingerprint Space: Wireless Indoor Localization with Little Human Intervention. In Proceedings of the ACM International Conference on Mobile Computing and Networking (MobiCom), Istanbul, Turkey, 22–26 August 2012; pp. 269–280. [Google Scholar]
- Wu, C.; Yang, Z.; Liu, Y.; Xi, W. WILL: Wireless Indoor Localization without Site Survey. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 839–848. [Google Scholar] [CrossRef]
- Jiang, Z.; Zhao, J.; Han, J.; Wang, Z.; Tang, S.; Zhao, J.; Xi, W. Wi-Fi Fingerprint Based Indoor Localization without Indoor Space Measurement. In Proceedings of the IEEE International Conference on Mobile Ad-Hoc and Sensor Systems (MASS), Hangzhou, China, 4–16 October 2013; pp. 384–392. [Google Scholar]
- Bolliger, P. Redpin—Adaptive, Zero-Configuration Indoor Localization through User Collaboration. In Proceedings of the ACM International Workshop on Mobile Entity Localization and Tracking in GPS-less Environments (MELT), San Francisco, CA, USA, 19 September 2008; pp. 55–60. [Google Scholar]
- Gao, Y.; Niu, J.; Zhou, R.; Xing, G. ZiFind: Exploiting Cross-Technology Interference Signatures for Energy-Efficient Indoor Localization. In Proceedings of the IEEE International Conference on Computer Communications, Turin, Italy, 14–19 April 2013; pp. 2940–2948. [Google Scholar]
- Niu, J.; Wang, B.; Shu, L.; Duong, T.Q.; Chen, Y. ZIL: An Energy-Efficient Indoor Localization System using ZigBee Radio to Detect WiFi Fingerprints. IEEE J. Sel. Areas Commun. 2015, 33, 1431–1442. [Google Scholar] [CrossRef]
- Ishida, S.; Izumi, K.; Yamamoto, T.; Tagashira, S.; Fukuda, A. Initial Evaluation of ZigLoc: Anchor-Free Sensor Localization System using WiFi Fingerprints. In Proceedings of the International Workshop on Mobile Computing Systems and Applications (HotMobile), Poster, Sonoma, CA, USA, 21–22 February 2017; p. 1. [Google Scholar]
- Yamamoto, T.; Ishida, S.; Izumi, K.; Tagashira, S.; Fukuda, F. Accuracy Improvement in Sensor Localization System Utilizing Heterogeneous Wireless Technologies. In Proceedings of the International Conference on Mobile Computing and Ubiquitous Networking (ICMU), Toyama, Japan, 3–5 October 2017; pp. 26–31. [Google Scholar]
- Kimoto, R.; Yamamoto, T.; Ishida, S.; Tagashira, S.; Fukuda, A. Evaluation of MultiZigLoc: Indoor ZigBee Localization System Using Inter-Channel Characteristics. In Proceedings of the 11th International Conference on Mobile Computing and Ubiquitous Networking (ICMU), Auckland, New Zealand, 5–8 October 2018; pp. 1–10. [Google Scholar]
- Minami, M.; Fukuju, Y.; Hirasawa, K.; Yokoyama, S.; Mizumachi, M.; Morikawa, H.; Aoyama, T. DOLPHIN: A Practical Approach for Implementing a Fully Distributed Indoor Ultrasonic Positioning System. In Lecture Notes in Computer Science (LNCS), Proceedings of the ACM Conference on Ubiquitous Computing (Ubicomp), Nottingham, UK, 7–10 September 2004; Springer: Berlin/Heidelberg, Germany, 2004; Volume 3205, pp. 347–365. [Google Scholar]
- Huang, L.; Wang, F.; Ma, C.; Duan, W. The Analysis of Anchor Placement for Self-localization Algorithm in Wireless Sensor Networks. In Advances in Wireless Sensor Networks, Communications in Computer and Information Science, Proceedings of Collaborative Wireless Sensor Networks (CWSN), Seoul, Korea, 14–17 October 2012; Springer: Berlin/Heidelberg, Germany, 2013; Volume 334, pp. 117–126. [Google Scholar]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-Less Low-Cost Outdoor Localization for Very Small Devices. IEEE Pers. Commun. Mag. 2000, 7, 28–34. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. Ad Hoc Positioning System (APS). In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM), San Antonio, TX, USA, 25–29 November 2001; pp. 2926–2931. [Google Scholar]
- Niculescu, D.; Nath, B. DV Based Positioning in Ad Hoc Networks. Telecommun. Syst. 2003, 22, 267–280. [Google Scholar] [CrossRef]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T. Range-Free Localization Schemes for Large Scale Sensor Networks. In Proceedings of the ACM International Conference on Mobile Computing and Networking (MobiCom), San Diego, CA, USA, 14–19 September 2003; pp. 81–95. [Google Scholar]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T.F. Range-Free Localization and Its Impact on Large Scale Sensor Networks. ACM Trans. Embed. Comput. Syst. (TECS) 2005, 4, 877–906. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based Fingerprinting for Infoor Localization: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2017, 66, 763–776. [Google Scholar] [CrossRef]
- Xie, Y.; Li, Z.; Li, M. Precise Power Delay Profiling with Commodity WiFi. In Proceedings of the ACM International Conference on Mobile Computing and Networking (MobiCom), Paris, France, 7–11 September 2015; pp. 53–64. [Google Scholar]
- Vasisht, D.; Kumar, S.; Katabi, D. Decimeter-Level Localization with a Single WiFi Access Point. In Proceedings of the USENIX Symposium on Networked Systems Design and Implementation (NSDI), Santa Clara, CA, USA, 16–18 March 2016; pp. 165–178. [Google Scholar]
- Zanella, A.; Bardella, A. RSS-Based Ranging by Multichannel RSS Averaging. IEEE Wirel. Commun. Lett. 2014, 3, 10–13. [Google Scholar] [CrossRef]
- Ishida, S.; Takaki, S.; Yamamoto, T.; Tagashira, S.; Fukuda, A. Evaluation of BLE Separate Channel Fingerprinting in Practical Environment. In Proceedings of the IIAI International Congress on Advanced Applied Informatics (AAI), International Conference on E-Services and Knowledge Management (ESKM), Yonago, Tottori, Japan, 8–12 July 2018; pp. 121–124. [Google Scholar]
- Ishida, S.; Kunihiro, Y.; Izumi, K.; Tagashira, S.; Fukuda, A. Design of WiFi-AP Operating Channel Estimation Scheme for Sensor Node. In Proceedings of the International Conference on Mobile Computing and Ubiquitous Networking (ICMU), Kaiserslautern, Germany, 4–6 October 2016; pp. 13–18. [Google Scholar]
- IEEE Standards Association. IEEE Std 802.15.4-2015, IEEE Standard for Local and Metropolitan Area Networks—Part 15.4: Low-Rate Wireless Personal Area Networks (LR-WPANs). 2015. Available online: http://standards.ieee.org/ (accessed on 22 June 2017).
- Texas Instruments. CC2420: Single-Chip 2.4 GHz IEEE 802.15.4 Compliant and ZigBee Ready RF Transceiver. datasheet. Available online: http://www.ti.com/ (accessed on 10 January 2019).
- Ishida, S.; Izumi, K.; Tagashira, S.; Fukuda, A. WiFi AP-RSS Monitoring using Sensor Nodes toward Anchor-Free Sensor Localization. In Proceedings of the IEEE Vehicular Technology Conference (VTC-Fall), Boston, MA, USA, 6–9 September 2015; pp. 1–5. [Google Scholar]
- Li, Z.; He, T. WEBee: Physical-Layer Cross-Technology Communication via Emulation. In Proceedings of the ACM International Conference on Mobile Computing and Networking (MobiCom), Snowbird, UT, USA, 16–20 October 2017; pp. 2–14. [Google Scholar]
- Izumi, K.; Ishida, S.; Tagashira, S.; Fukuda, A. Design of WiFi AP-RSS Monitoring System using Sensor Nodes. In Proceedings of the International Symposium on Computing and Networking (CANDAR), Sapporo, Japan, 8–11 December 2015; pp. 115–121. [Google Scholar]
- He, S.; Ji, B.; Chan, S.H.G. Chameleon: Survey-Free Updating of a Fingerprint Database for Indoor Localization. IEEE Pervasive Comput. 2016, 15, 66–75. [Google Scholar] [CrossRef]
- He, S.; Lin, W.; Chan, S.H.G. Indoor Localization and Automatic Fingerprint Update with Altered AP Signals. IEEE Trans. Mob. Comput. 2017, 16, 1897–1910. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) Channel 21 | (b) Channel 22 | ||||||||||||
| Location | Location | ||||||||||||
| Location | a | – | 0.00 | 0.00 | 0.00 | 0.00 | Location | a | – | 0.00 | 0.00 | 0.00 | 0.00 |
| b | 0.00 | – | 0.00 | 0.00 | 0.00 | b | 0.00 | – | 0.01 | 0.00 | 0.00 | ||
| c | 0.00 | 0.00 | – | 0.00 | 0.00 | c | 0.00 | 0.01 | – | 0.00 | 0.00 | ||
| d | 0.00 | 0.00 | 0.00 | – | 0.00 | d | 0.00 | 0.00 | 0.00 | – | 0.00 | ||
| e | 0.00 | 0.00 | 0.00 | 0.00 | – | e | 0.00 | 0.00 | 0.00 | 0.00 | – | ||
| (c) Channel 23 | (d) Channel 24 | ||||||||||||
| Location | Location | ||||||||||||
| Location | a | – | 0.00 | 0.00 | 0.00 | 0.00 | Location | a | – | 0.00 | 0.00 | 0.00 | 0.00 |
| b | 0.00 | – | 0.00 | 0.00 | 0.00 | b | 0.00 | – | 0.00 | 0.00 | 0.00 | ||
| c | 0.00 | 0.00 | – | 0.00 | 0.00 | c | 0.00 | 0.00 | – | 0.00 | 0.00 | ||
| d | 0.00 | 0.00 | 0.00 | – | 0.00 | d | 0.00 | 0.00 | 0.00 | – | 0.00 | ||
| e | 0.00 | 0.00 | 0.00 | 0.00 | – | e | 0.00 | 0.00 | 0.00 | 0.00 | – | ||
| (a) Location a | |||||
| Channel | |||||
| 21 | 22 | 23 | 24 | ||
| Channel | 21 | – | 0.00 | 0.00 | 0.00 |
| 22 | 0.00 | – | 0.00 | 0.00 | |
| 23 | 0.00 | 0.00 | – | 0.00 | |
| 24 | 0.00 | 0.00 | 0.00 | – | |
| (b) Location c | |||||
| Channel | |||||
| 21 | 22 | 23 | 24 | ||
| Channel | 21 | – | 0.00 | 0.00 | 0.00 |
| 22 | 0.00 | – | 0.00 | 0.00 | |
| 23 | 0.00 | 0.00 | – | 0.00 | |
| 24 | 0.00 | 0.00 | 0.00 | – | |
| (c) Location e | |||||
| Channel | |||||
| 21 | 22 | 23 | 24 | ||
| Channel | 21 | – | 0.00 | 0.00 | 0.00 |
| 22 | 0.00 | – | 0.00 | 0.00 | |
| 23 | 0.00 | 0.00 | – | 0.00 | |
| 24 | 0.00 | 0.00 | 0.00 | – | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kimoto, R.; Ishida, S.; Yamamoto, T.; Tagashira, S.; Fukuda, A. MuCHLoc: Indoor ZigBee Localization System Utilizing Inter-Channel Characteristics. Sensors 2019, 19, 1645. https://doi.org/10.3390/s19071645
Kimoto R, Ishida S, Yamamoto T, Tagashira S, Fukuda A. MuCHLoc: Indoor ZigBee Localization System Utilizing Inter-Channel Characteristics. Sensors. 2019; 19(7):1645. https://doi.org/10.3390/s19071645
Chicago/Turabian StyleKimoto, Ryota, Shigemi Ishida, Takahiro Yamamoto, Shigeaki Tagashira, and Akira Fukuda. 2019. "MuCHLoc: Indoor ZigBee Localization System Utilizing Inter-Channel Characteristics" Sensors 19, no. 7: 1645. https://doi.org/10.3390/s19071645
APA StyleKimoto, R., Ishida, S., Yamamoto, T., Tagashira, S., & Fukuda, A. (2019). MuCHLoc: Indoor ZigBee Localization System Utilizing Inter-Channel Characteristics. Sensors, 19(7), 1645. https://doi.org/10.3390/s19071645