Looseness Monitoring of Bolted Spherical Joint Connection Using Electro-Mechanical Impedance Technique and BP Neural Networks



Abstract
:1. Introduction
2. Detection Principle
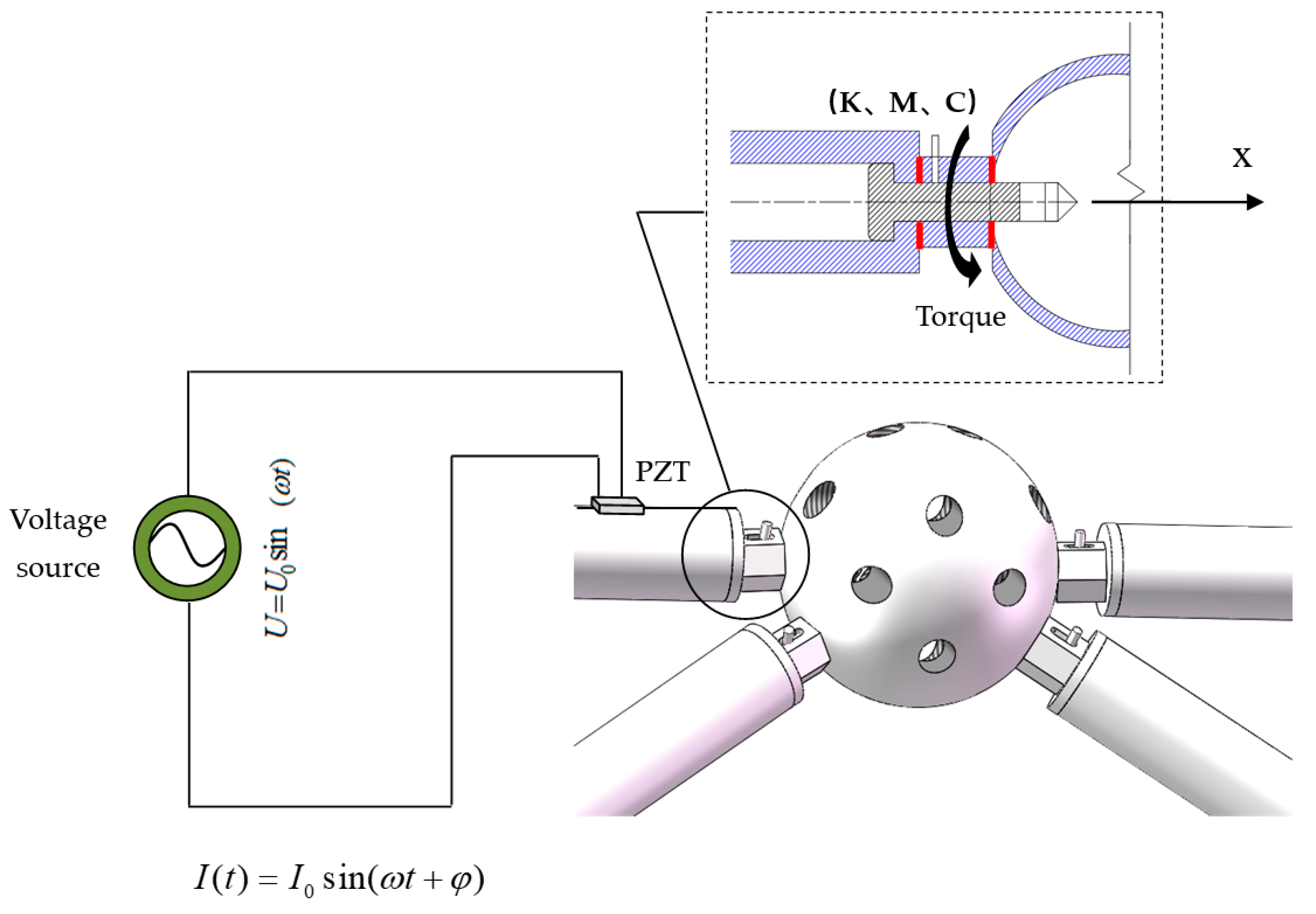
2.1. Electro-Mechanical Impedance
2.2. Monitoring the Looseness of Bolted Spherical Joints Based on Electro-Mechanical Impedance
2.3. Damage Identification Index
2.4. Bolted Spherical Joint Looseness Monitoring Using BPNNs
3. Experimental Setup
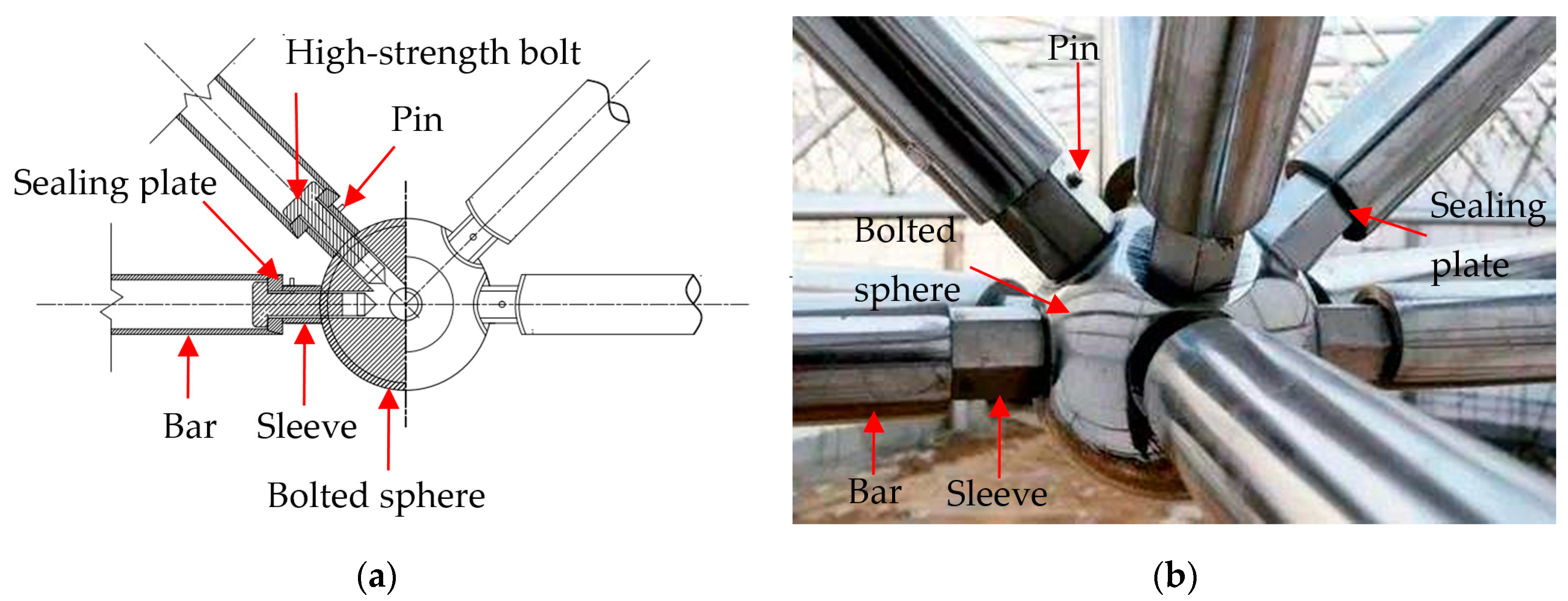
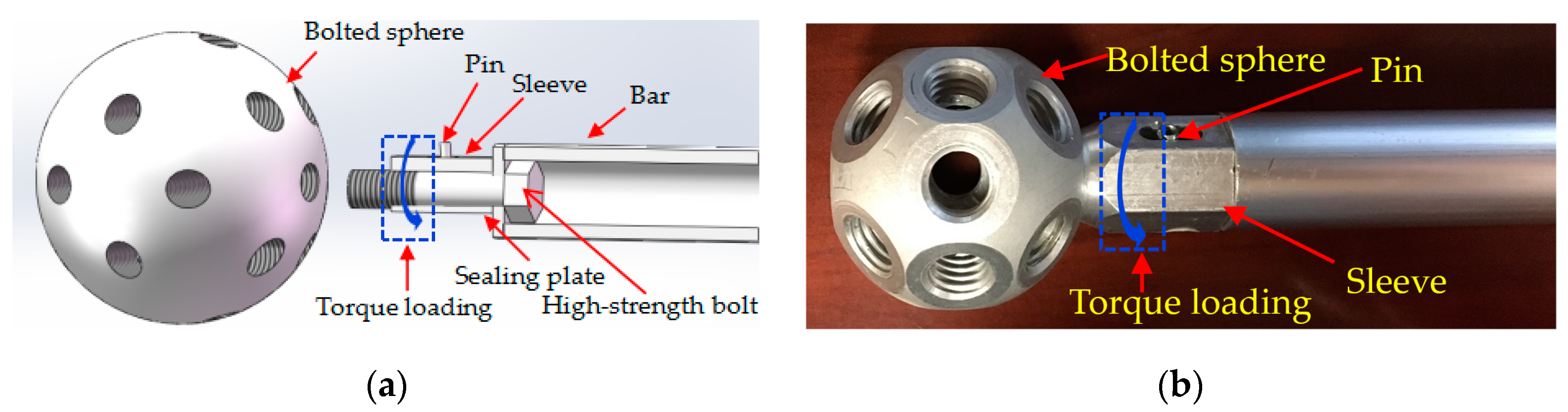
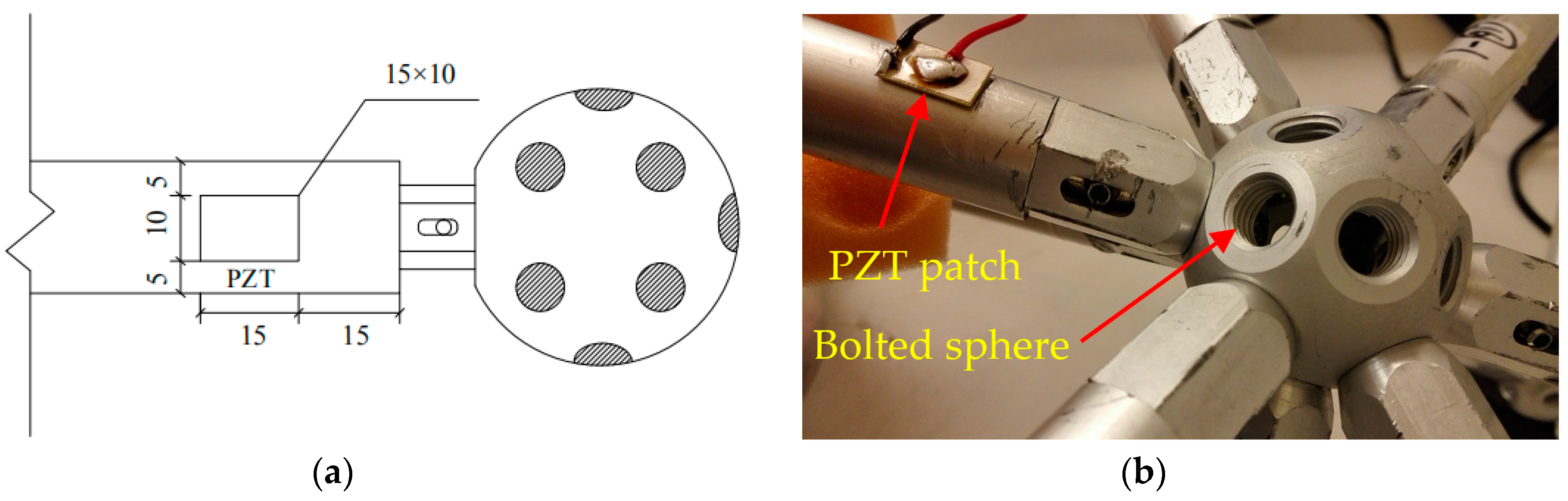
3.1. Specimen
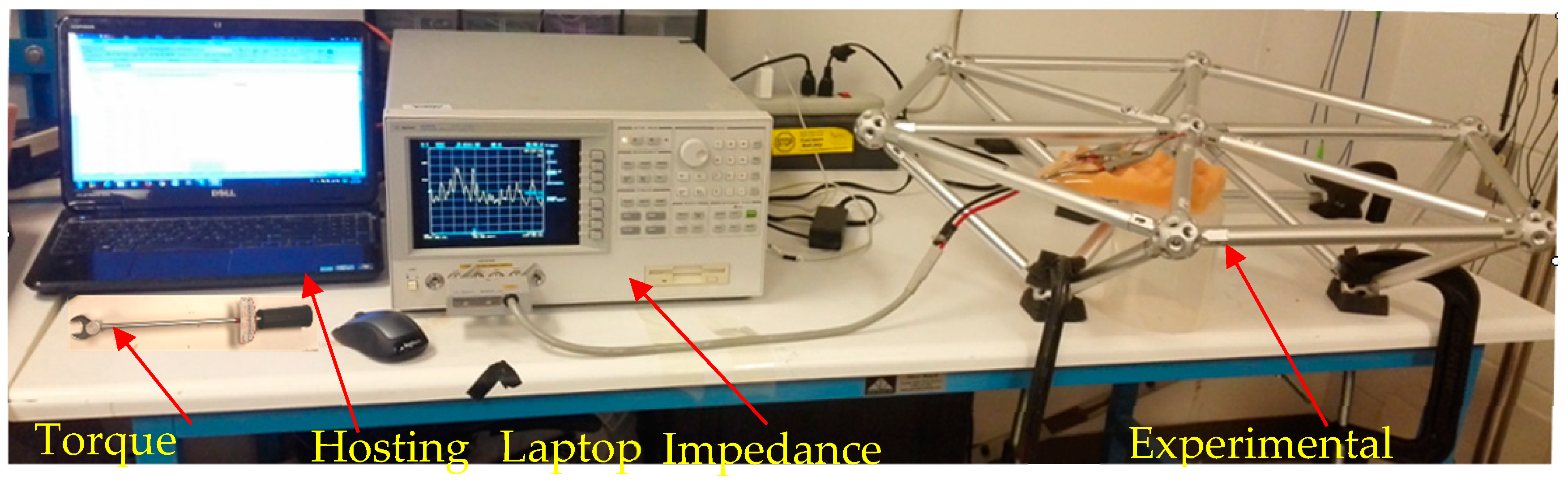
3.2. Bolted Sphere Experiment Setup
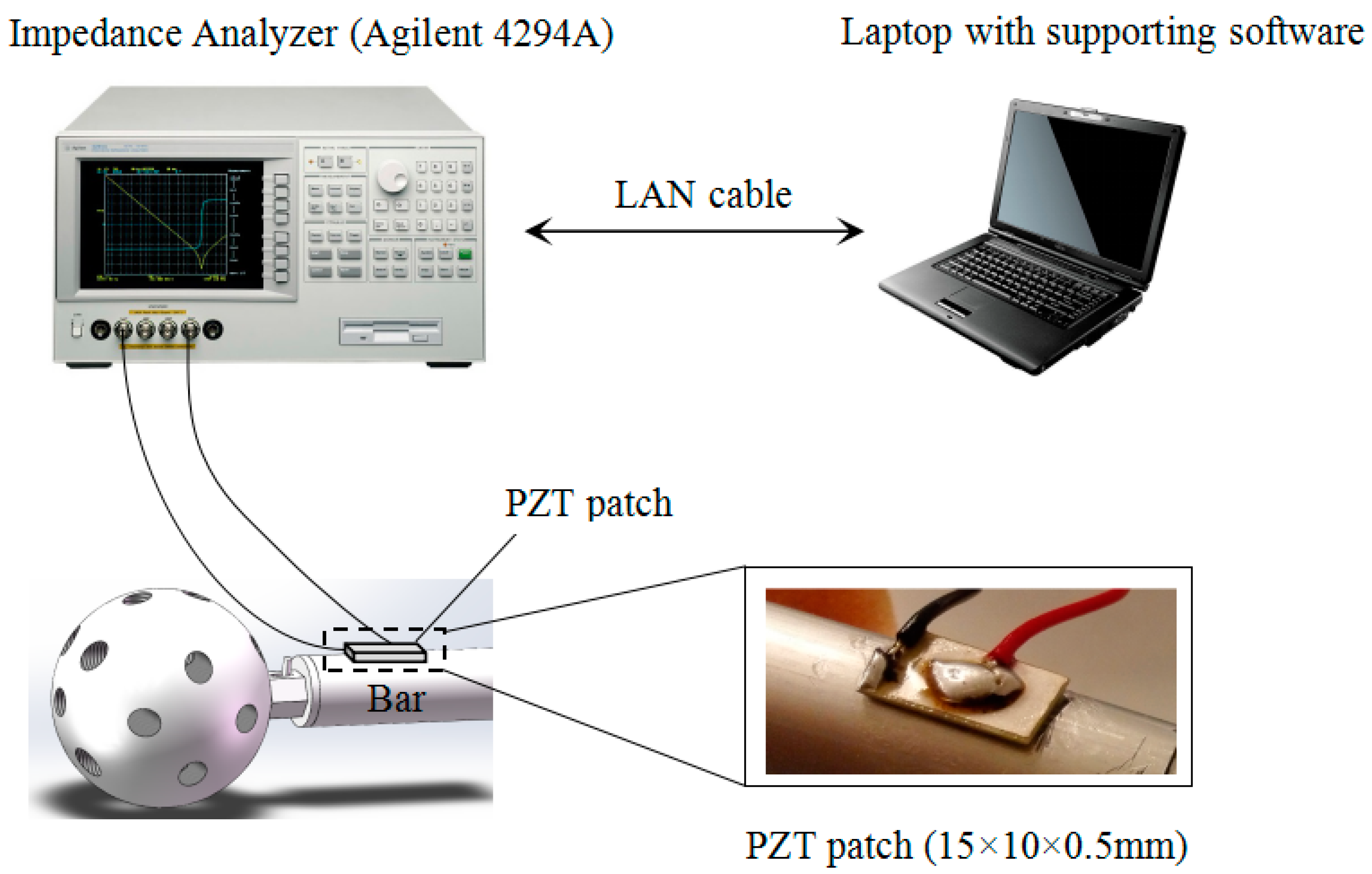
3.3. EMI Monitoring
4. Experimental Results and Analysis
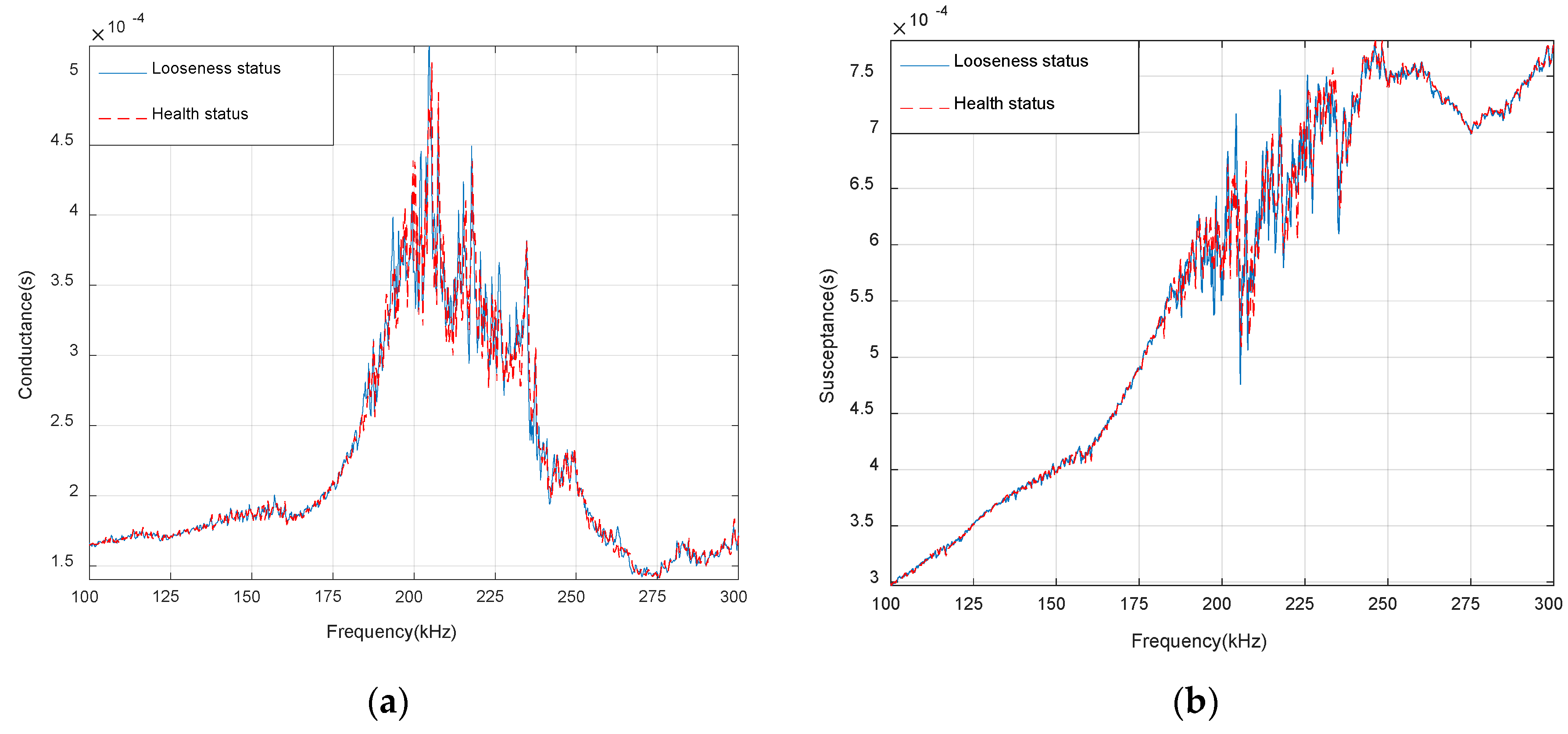
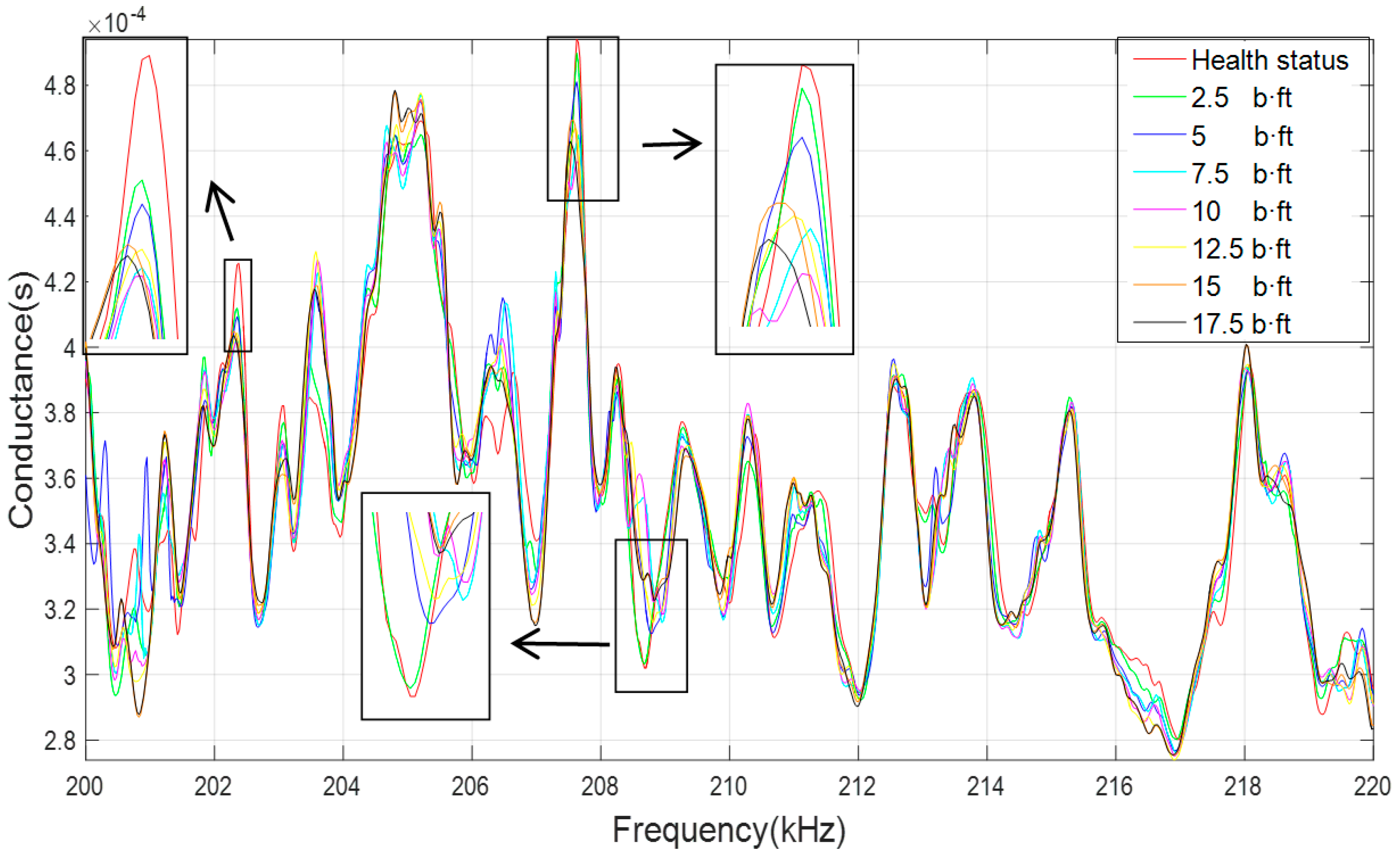
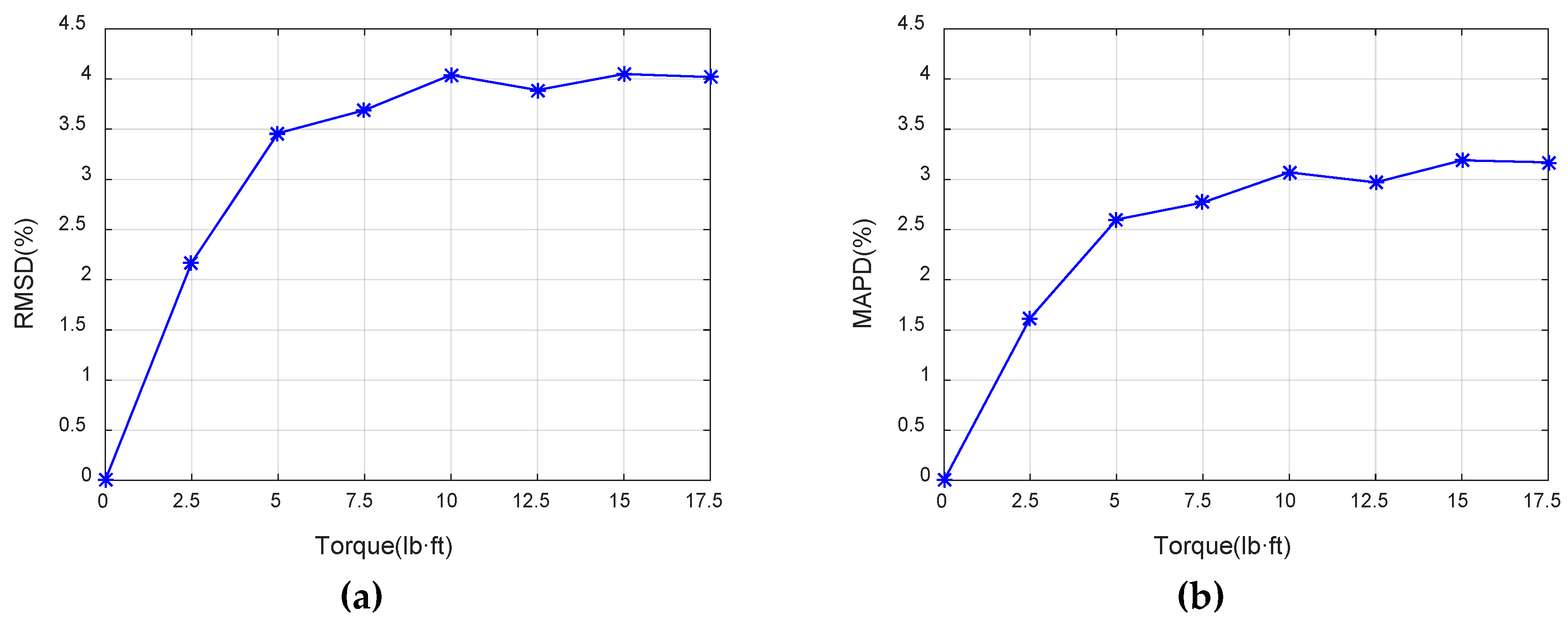
4.1. Looseness-Monitoring Index
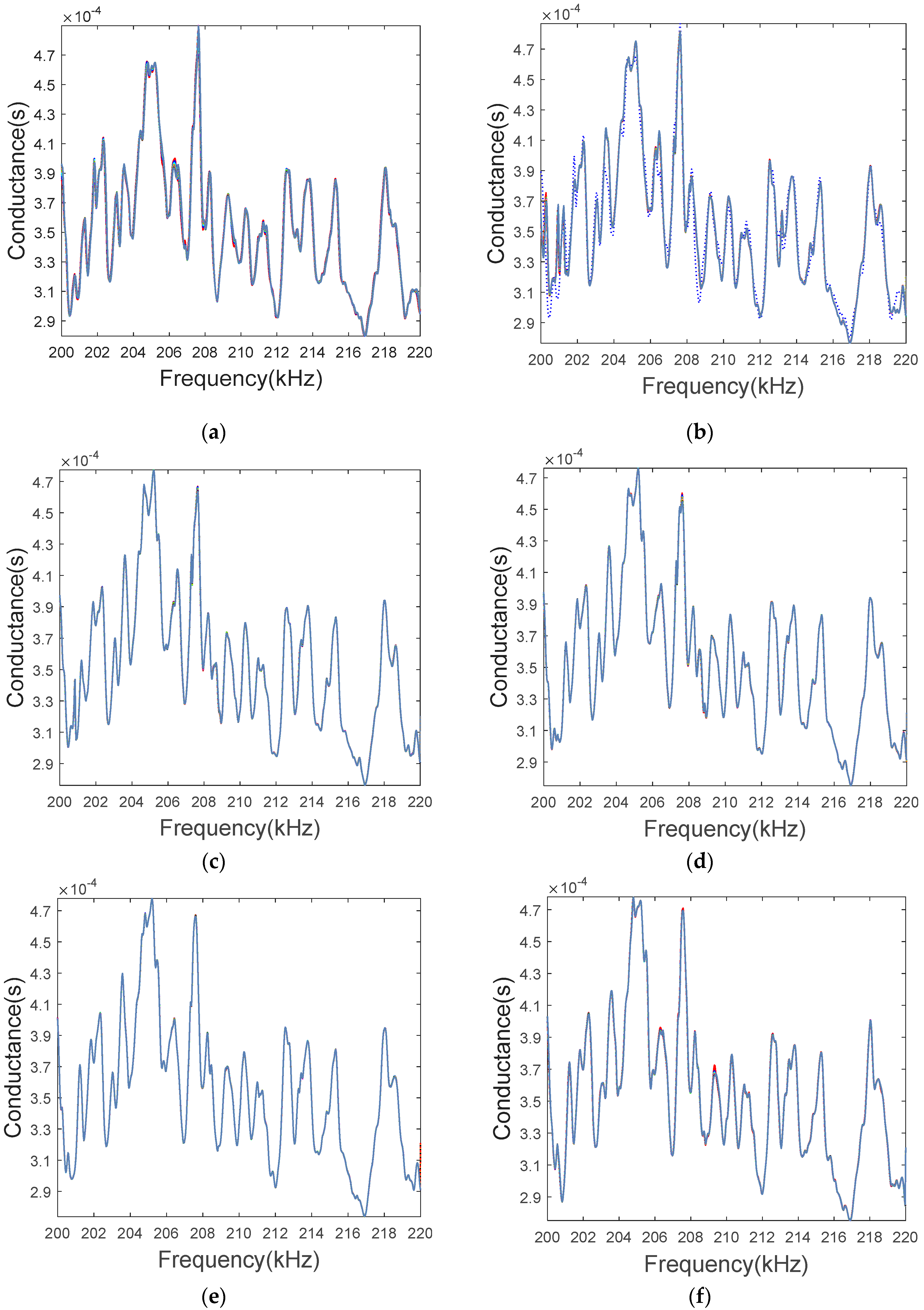
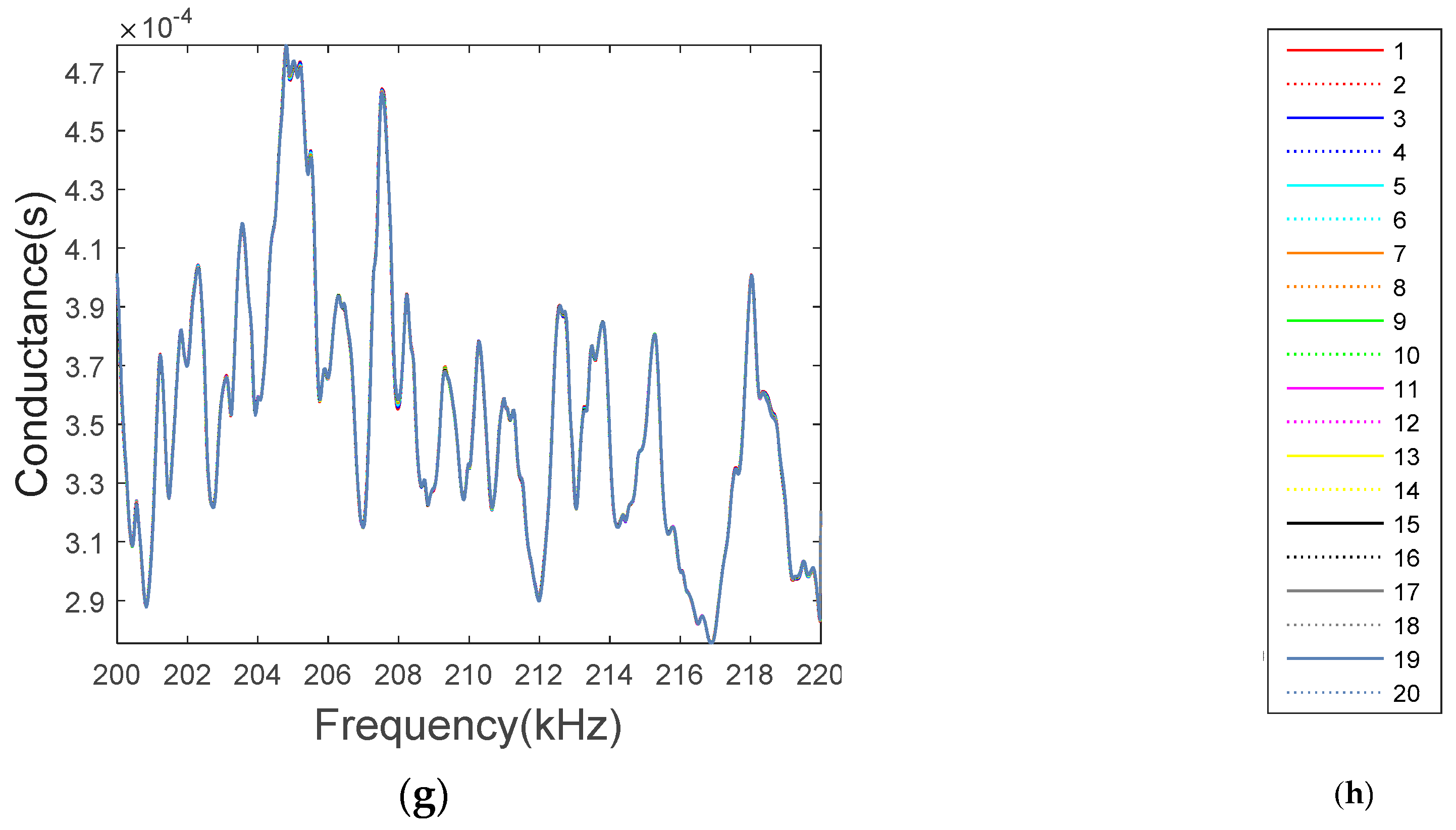
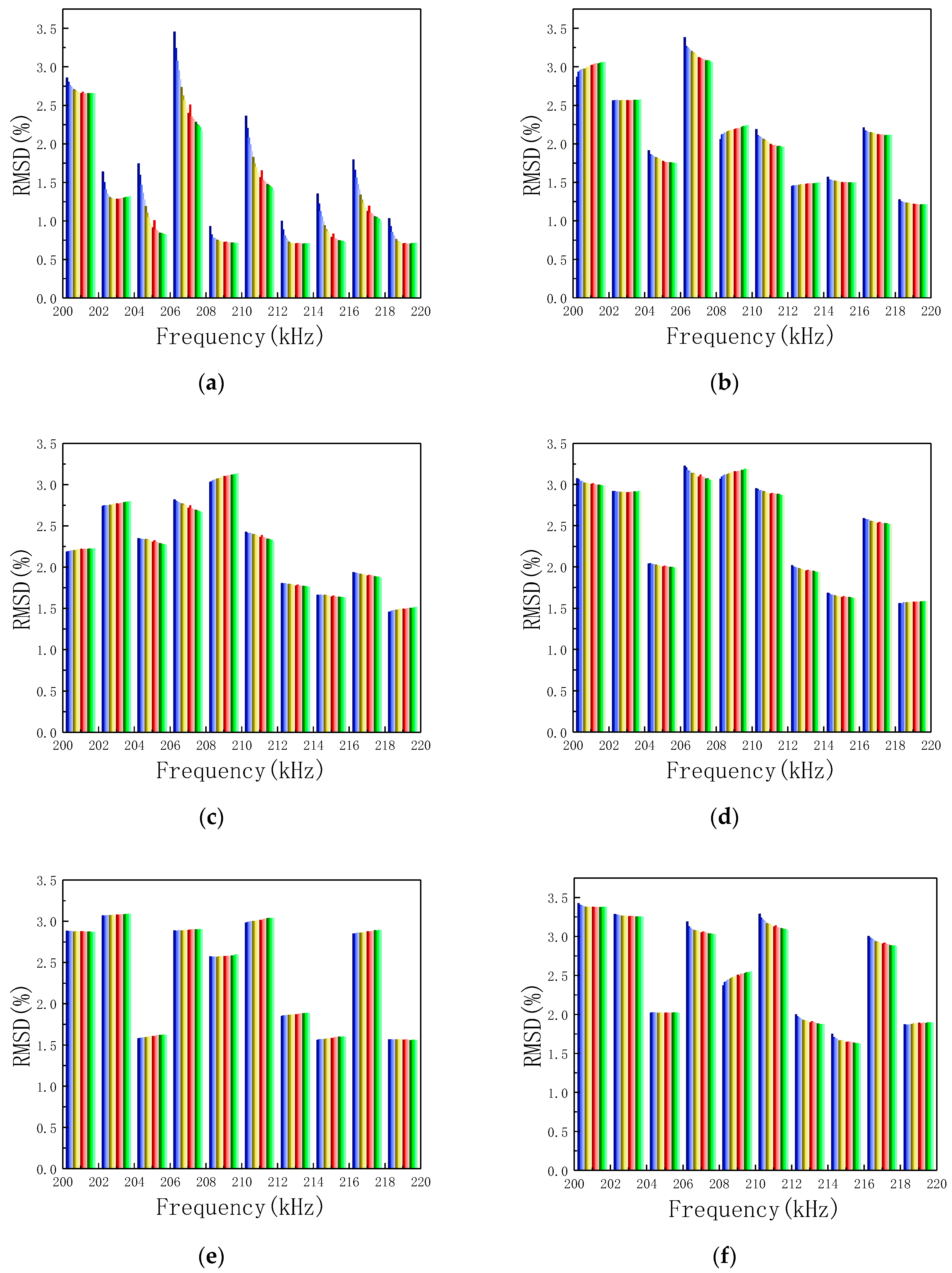
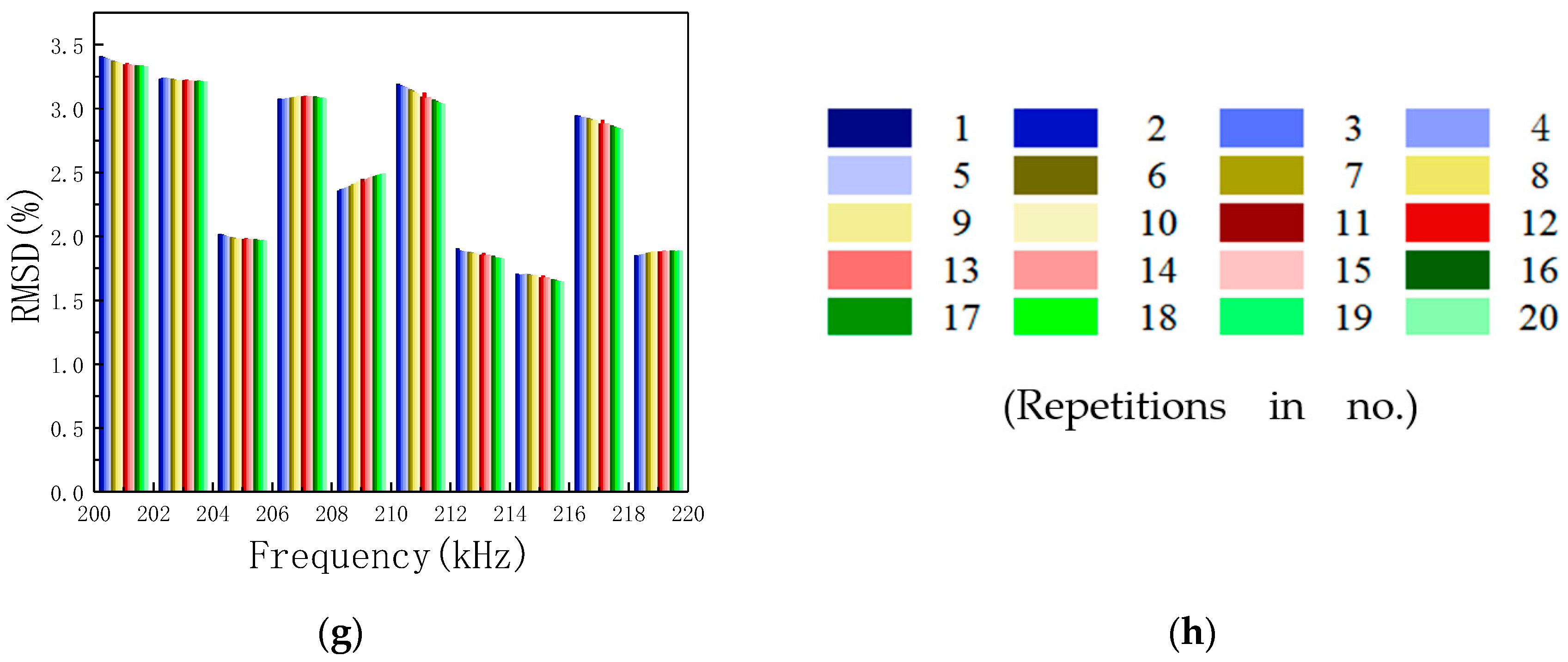
4.2. Repeatability Verification
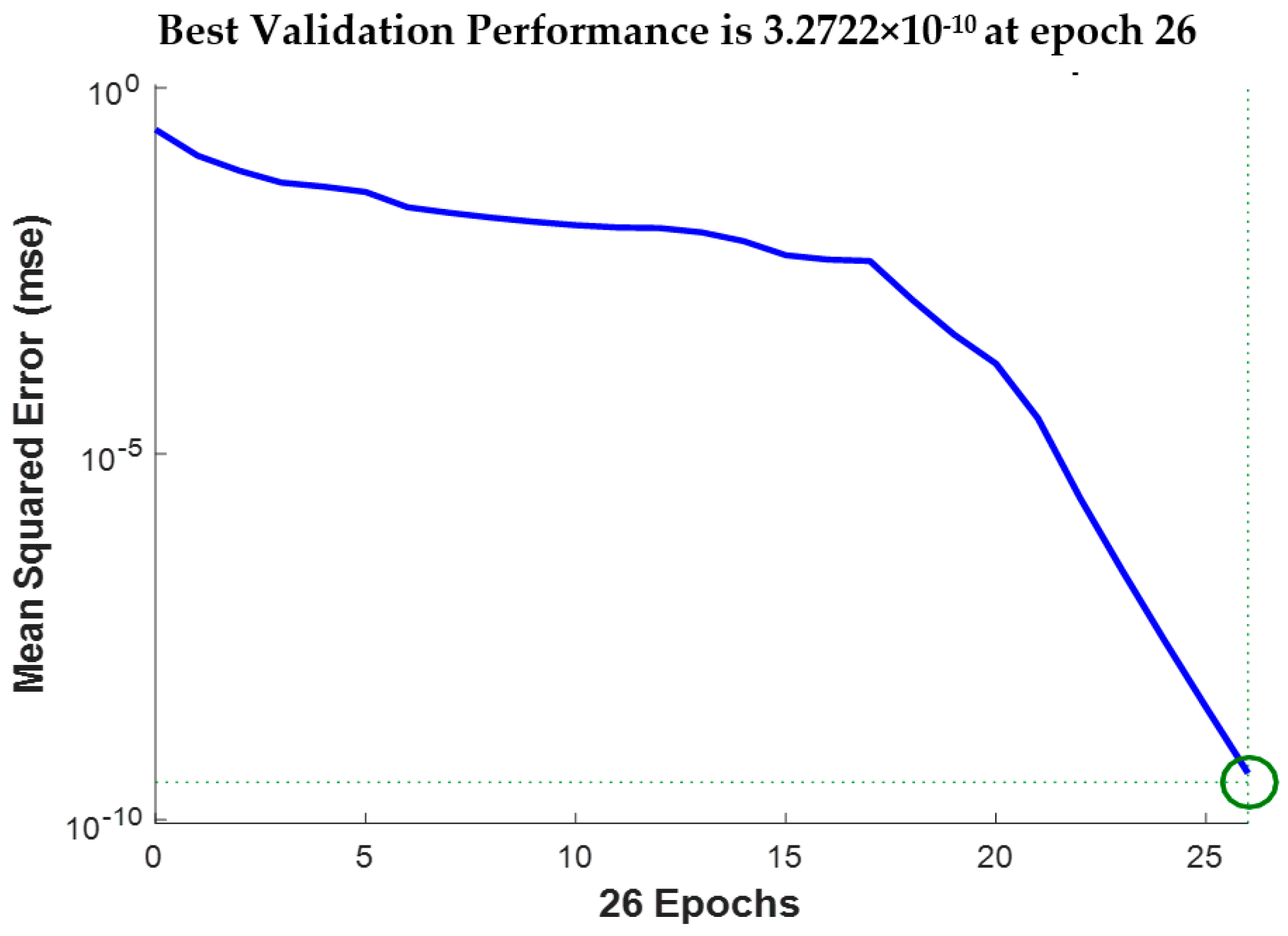
4.3. Determining the Damage Degree Based on BPNNs
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, X.; Lei, H.; Chen, Y.F. Constant amplitude fatigue test research on M20 high-strength bolts in grid structure with bolt–sphere joints. Adv. Struct. Eng. 2017, 20, 1466–1475. [Google Scholar] [CrossRef]
- Song, G.; Vllatas, J.; Johnson, S.; Agrawal, B. Active Vibration Control of A Space Truss Using Piezoceramic Stack Actuator. J. Aerosp. Eng. 2001, 6, 355–361. [Google Scholar] [CrossRef]
- Huo, L.; Song, G.; Nagarajaiah, S.; Li, H. Semi-active vibration suppression of a space truss structure using a fault tolerant controller. J. Vib. Control 2012, 18, 1436–1453. [Google Scholar] [CrossRef]
- Liu, X.; Luo, Y. Safety assessment method of existing large span steel structures. J. Southeast Univ. 2008, 38, 709–712. [Google Scholar]
- Xu, J.; Hao, J.; Li, H.; Luo, M.; Guo, W.; Li, W. Experimental damage identification of a model reticulated shell. Appl. Sci. 2017, 7, 362. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, H.; Qian, H.; Han, K.; Fan, F. Study on influence caused by bolt-connection defect on mechanical properties of bolt-ball joint. J. Harbin Inst. Technol. 2017, 49, 53–59. [Google Scholar]
- Xu, J.; Wang, C.; Li, H.; Zhang, C.; Hao, J.; Fan, S. Health Monitoring of Bolted Spherical Joint Connection Based on Active Sensing Technique Using Piezoceramic Transducers. Sensors 2018, 18, 1727. [Google Scholar] [CrossRef] [PubMed]
- Oregui, M.; Li, S.; Núñez, A.; Li, Z.; Carroll, R.; Dollevoet, R. Monitoring bolt tightness of rail joints using axle box acceleration measurements. Struct. Control Health Monit. 2017, 24, 1848. [Google Scholar] [CrossRef]
- Huo, L.; Wang, F.; Li, H.; Song, G. A fractal contact theory based model for bolted connection looseness monitoring using piezoceramic transducers. Smart Mater. Struct. 2017, 26, 104010. [Google Scholar] [CrossRef]
- Du, G.; Huo, L.; Kong, Q.; Song, G. Damage detection of pipeline multiple cracks using piezoceramic transducers. J. Vibroeng. 2016, 18, 2828–2838. [Google Scholar] [CrossRef]
- Jia, Z.; Ren, L.; Li, H.; Ho, S.; Song, G. Experimental study of pipeline leak detection based on hoop strain measurement. Struct. Control Health Monit. 2015, 22, 799–812. [Google Scholar] [CrossRef]
- Feng, Q.; Kong, Q.; Huo, L.; Song, G. Crack detection and leakage monitoring on reinforced concrete pipe. Smart Mater. Struct. 2015, 24, 115020. [Google Scholar] [CrossRef]
- Ali, S.; Qaisar, S.; Saeed, H.; Khan, M.; Naeem, M.; Anpalagan, A. Network challenges for cyber physical systems with tiny wireless devices: A case study on reliable pipeline condition monitoring. Sensors 2015, 15, 7172–7205. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Lei, M.; Luo, M.; Song, G. An Automatic Extraction Algorithm for Measurement of Installed Rock Bolt Length Based on Stress Wave Reflection. Measurement 2018, 122, 563–572. [Google Scholar] [CrossRef]
- Li, W.; Luo, M.; Wang, B.; Fu, Q.; Song, G. Measurement of the Length of Installed Rock Bolt Based on Stress Wave Reflection by Using a Giant Magnetostrictive (GMS) Actuator and a PZT Sensor. Sensors 2017, 17, 444. [Google Scholar] [Green Version]
- Yan, Q.; Zhang, C.; Lin, G.; Wang, B. Field monitoring of deformations and internal forces of surrounding rocks and lining structures in the construction of the Gangkou double-arched tunnel—A case study. Appl. Sci. 2017, 7, 169. [Google Scholar] [CrossRef]
- Li, W.; Xu, C.; Ho, S.C.M.; Wang, B.; Song, G. Monitoring Concrete Deterioration due to Reinforcement Corrosion by Integrating Acoustic Emission and FBG Strain Measurements. Sensors 2017, 17, 657. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Kong, Q.; Ho, S.C.M.; Mo, Y.L.; Song, G. Feasibility study of using smart aggregates as embedded acoustic emission sensors for health monitoring of concrete structures. Smart Mater. Struct. 2016, 25, 115031. [Google Scholar] [CrossRef]
- Fan, S.; Zhao, S.; Qi, B.; Kong, Q. Damage Evaluation of Concrete Column Under Impact Load Using a Piezoelectric-Based EMI Technique. Sensors 2018, 18, 15915. [Google Scholar] [CrossRef] [PubMed]
- Kong, Q.; Robert, R.H.; Silva, P.; Mo, Y.L. Cyclic crack monitoring of a reinforced concrete column under simulated pseudo-dynamic loading using piezoceramic-based smart aggregates. Appl. Sci. 2016, 6, 341. [Google Scholar] [CrossRef]
- Perera, R.; Pérez, A.; García-Diéguez, M.; Zapico-Valle, J.L. Active wireless system for structural health monitoring applications. Sensors 2017, 17, 2880. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Luo, M.; Hei, C.; Song, G. Concrete Infill Monitoring in Concrete-Filled FRP Tubes Using a PZT-Based Ultrasonic Time-of-Flight Method. Sensors 2016, 16, 2083. [Google Scholar] [Green Version]
- Xu, B.; Zhang, T.; Song, G.; Gu, H. Active interface debonding detection of a concrete-filled steel tube with PZT techniques using wavelet packet analysis. Mech. Syst. Signal Process. 2013, 36, 7–17. [Google Scholar] [CrossRef]
- Yan, S.; Ma, H.; Li, P.; Song, G.; Wu, J. Development and application of a structural health monitoring system based on wireless smart aggregates. Sensors 2017, 17, 1641. [Google Scholar] [CrossRef]
- Xu, Y.; Luo, M.; Hei, C.; Song, G. Quantitative evaluation of compactness of concrete-filled fiber-reinforced polymer tubes using piezoceramic transducers and time difference of arrival. Smart Mater. Struct. 2018, 27, 035023. [Google Scholar] [CrossRef] [Green Version]
- Xu, B.; Li, B.; Song, G. Active debonding detection for large rectangular CFSTs based on wavelet packet energy spectrum with piezoceramics. ASCE J. Struct. Eng. 2013, 139, 1435–1443. [Google Scholar] [CrossRef]
- Jiang, T.; Kong, Q.; Patil, D.; Luo, Z.; Huo, L.; Song, G. Detection of debonding between FRP rebar and concrete structure using piezoceramic transducers and wavelet packet analysis. IEEE Sens. J. 2017, 17, 1992–1998. [Google Scholar] [CrossRef]
- Qi, B.; Kong, Q.; Qian, H.; Patil, D.; Lim, I.; Li, M.; Liu, D.; Song, G. Study of Impact Damage in PVA-ECC Beam under Low-Velocity Impact Loading Using Piezoceramic Transducers and PVDF Thin-Film Transducers. Sensors 2018, 18, 671. [Google Scholar] [CrossRef] [PubMed]
- Liu, C. Researches on the Method of Modal Identification and Damage Diagnosis of Spatial Lattice Structure Researches on the Method of Modal Identification. Ph.D. Thesis, Beijing University of Technology, Beijing, China, June 2014. [Google Scholar]
- Ding, Y. Discussion on design, construction and inspection of space grid structures and light-weight steel structures. Spat. Struct. 2004, 10, 55–64. [Google Scholar]
- Martowicz, A.; Sendecki, A.; Salamon, M.; Rosiek, M.; Uhl, T. Application of electromechanical impedance-based SHM for damage detection in bolted pipeline connection. Nondestruct. Test. Eval. 2016, 31, 17–44. [Google Scholar] [CrossRef]
- Peairs, D.M.; Park, G.; Inman, D.J. Improving accessibility of the impedance-based structural health monitoring method. J. Intell. Mater. Syst. Struct. 2004, 15, 129–139. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, D.; Zheng, L.; Huo, L.; Song, G. Influence of axial load on electromechanical impedance (emi) of embedded piezoceramic transducers in steel fiber concrete. Sensors 2018, 18, 1782. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Zagrai, A. Damage detection in thin plates and aerospace structures with the electro-mechanical impedance method. Struct. Health Monit. 2005, 4, 99–118. [Google Scholar] [CrossRef]
- Liang, C.; Sun, F.P.; Rogers, C.A. An impedance method for dynamic analysis of active material systems. J. Vib. Acoust. 1994, 116, 120–128. [Google Scholar] [CrossRef]
- Li, W.; Fan, S.; Ho, S.C.M.; Wu, J.; Song, G. Interfacial Debonding Detection in FRP Rebar Reinforced Concrete Using Electro-Mechanical Impedance Technique. Struct. Health Monit. 2018, 17, 461–471. [Google Scholar] [CrossRef]
- Shi, Y.; Luo, M.; Li, W. Grout compactness monitoring of concrete-filled fiber-reinforced polymer tube using electromechanical impedance. Smart Mater. Struct. 2018, 27, 055008. [Google Scholar] [CrossRef] [Green Version]
- Liang, Y.; Li, D.; Parvasi, S.M.; Kong, Q.; Song, G. Bond-slip detection of concrete-encased composite structure using electro-mechanical impedance technique. Smart Mater. Struct. 2016, 25, 095003. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, H.; Annamdas, V.G.M.; Soh, C.K. Monitoring damage propagation using PZT impedance transducers. Smart Mater. Struct. 2009, 18, 045003. [Google Scholar] [CrossRef]
- Annamdas, V.G.M.; Soh, C.K. Evaluation of peak-free electromechanical piezo-impedance and electromagnetic contact sensing using metamaterial surface plasmons for load monitoring. Smart Mater. Struct. 2016, 26, 015003. [Google Scholar] [CrossRef]
- Yang, Y.; Annamdas, V.; Wang, C.; Zhou, Y. Application of multiplexed FBG and PZT impedance sensors for health monitoring of rocks. Sensors 2008, 8, 271–289. [Google Scholar] [CrossRef]
- Xu, Y.G.; Liu, G.R. A modified electro-mechanical impedance model of piezoelectric actuator-sensors for debonding detection of composite patches. J. Intell. Mater. Syst. Struct. 2002, 13, 389–396. [Google Scholar] [CrossRef]
- Lu, X.; Lim, Y.Y.; Soh, C.K. A novel electromechanical impedance–based model for strength development monitoring of cementitious materials. Struct. Health Monit. 2018, 17, 902–918. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, Y. Electromechanical impedance modeling of PZT transducers for health monitoring of cylindrical shell structures. Smart Mater. Struct. 2007, 17, 015005. [Google Scholar] [CrossRef]
- Wang, F.; Ho, S.C.M.; Huo, L.; Song, G. A novel fractal contact-electromechanical impedance model for quantitative monitoring of bolted joint looseness. IEEE Access 2018, 6, 40212–40220. [Google Scholar] [CrossRef]
- Na, W.S.; Baek, J. Impedance-based non-destructive testing method combined with unmanned aerial vehicle for structural health monitoring of civil infrastructures. Appl. Sci. 2016, 7, 15. [Google Scholar] [CrossRef]
- Koo, K.Y.; Park, S.; Lee, J.J.; Yun, C.B. Automated impedance-based structural health monitoring incorporating effective frequency shift for compensating temperature effects. J. Intell. Mater. Syst. Struct. 2009, 20, 367–377. [Google Scholar] [CrossRef]
- An, Y.K.; Sohn, H. Integrated impedance and guided wave based damage detection under temperature variation. In Proceedings of the SPIE Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2011, San Diego, CA, USA, 7–10 March 2011. [Google Scholar]
- Haider, M.F.; Giurgiutiu, V.; Lin, B.; Yu, L. Irreversibility effects in piezoelectric wafer active sensors after exposure to high temperature. Smart Mater. Struct. 2017, 26, 095019. [Google Scholar] [CrossRef]
- Huynh, T.C.; Kim, J.T. Quantification of temperature effect on impedance monitoring via PZT interface for prestressed tendon anchorage. Smart Mater. Struct. 2017, 26, 125004. [Google Scholar] [CrossRef]
- Huynh, T.C.; Dang, N.L.; Kim, J.T. PCA-based filtering of temperature effect on impedance monitoring in prestressed tendon anchorage. Smart Struct. Syst. 2018, 22, 57–70. [Google Scholar]
- de Araújo, R.; de Freitas, V.; de Lima, G.; Salazar, A.; Neto, A.; Maitelli, A. Pipeline Inspection Gauge’s Velocity Simulation Based on Pressure Differential Using Artificial Neural Networks. Sensors 2018, 18, 3072. [Google Scholar] [CrossRef] [PubMed]
- Mai, H.; Song, G.; Liao, X. Time-delayed dynamic neural network-based model for hysteresis behavior of shape-memory alloys. Neural Comput. Appl. 2016, 27, 1519–1531. [Google Scholar] [CrossRef]
- Wang, H.; Song, G. Innovative NARX recurrent neural network model for ultra-thin shape memory alloy wire. Neurocomputing 2014, 134, 289–295. [Google Scholar] [CrossRef]
- Shao, J.; Wang, T.; Yin, H.; Yang, D.; Li, Y. Bolt looseness detection based on piezoelectric impedance frequency shift. Appl. Sci. 2016, 6, 298. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, Y.; Lu, Y. Sensitivity of PZT impedance sensors for damage detection of concrete structures. Sensors 2008, 8, 327–346. [Google Scholar] [CrossRef]
- Wang, D.; Wang, Q.; Wang, H.; Zhu, H. Experimental study on damage detection in timber specimens based on an electromechanical impedance technique and RMSD-based mahalanobis distance. Sensors 2016, 16, 1765. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Li, W.; Feng, Q. Electro-Mechanical Impedance (EMI) Based Interlayer Slide Detection Using Piezoceramic Smart Aggregates—A Feasibility Study. Sensors 2018, 18, 3524. [Google Scholar] [CrossRef]
- Na, W.; Baek, J. A review of the piezoelectric electromechanical impedance based structural health monitoring technique for engineering structures. Sensors 2018, 18, 1307. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Ho, S.C.M.; Song, G.; Ren, L.; Li, H. A review of damage detection methods for wind turbine blades. Smart Mater. Struct. 2015, 24, 033001. [Google Scholar] [CrossRef]
- Wu, A.; He, S.; Ren, Y.; Wang, N.; Ho, S.C.M.; Song, G. Design of a New Stress Wave-Based Pulse Position Modulation (PPM) Communication System with Piezoceramic Transducers. Sensors 2019, 19, 558. [Google Scholar] [CrossRef]
- Yang, W.; Kong, Q.; Ho, S.C.M.; Mo, Y.L.; Song, G. Real-Time Monitoring of Soil Compaction Using Piezoceramic-Based Embeddable Transducers and Wavelet Packet Analysis. IEEE Access 2018, 6, 5208–5214. [Google Scholar] [CrossRef]
- Kurt, I.; Akbarov, S.D.; Sezer, S. The influence of the initial stresses on Lamb wave dispersion in pre-stressed PZT/Metal/PZT sandwich plates. Struct. Eng. Mech. 2016, 58, 347–378. [Google Scholar] [CrossRef]
- Lu, G.; Li, Y.; Zhou, M.; Feng, Q.; Song, G. Detecting Damage Size and Shape in a Plate Structure Using PZT Transducer Array. J. Aerosp. Eng. 2018, 31, 04018075. [Google Scholar] [CrossRef]
- Wang, X.; Shi, Z.; Song, G. Analytical study of influence of boundary conditions on acoustic power transfer through an elastic barrier. Smart Mater. Struct. 2018, 28, 025004. [Google Scholar] [CrossRef]
- Huynh, T.C.; Lee, K.S.; Kim, J.T. Local dynamic characteristics of PZT impedance interface on tendon anchorage under prestress force variation. Smart Struct. Syst. 2015, 15, 375–393. [Google Scholar] [CrossRef]
- Wang, B.; Huo, L.; Chen, D.; Li, W.; Song, G. Impedance-Based Pre-Stress Monitoring of Rock Bolts Using a Piezoceramic-Based Smart Washer—A Feasibility Study. Sensors 2017, 17, 250. [Google Scholar] [CrossRef]
- Huo, L.; Chen, D.; Liang, Y.; Li, H.; Feng, X.; Song, G. Impedance based bolt pre-load monitoring using piezoceramic smart washer. Smart Mater. Struct. 2017, 26, 057004. [Google Scholar] [CrossRef]
- Wang, T.; Wei, D.; Shao, J.; Li, Y.; Song, G. Structural Stress Monitoring Based on Piezoelectric Impedance Frequency Shift. J. Aerosp. Eng. 2018, 31, 04018092. [Google Scholar] [CrossRef]
- Wang, T.; Song, G.; Liu, S.; Li, Y.; Xiao, H. Review of Bolted Connection Monitoring. Int. J. Distrib. Sens. Netw. 2013. [Google Scholar] [CrossRef]
- Yin, H.; Wang, T.; Yang, D.; Liu, S.; Shao, J.; Li, Y. A smart washer for bolt looseness monitoring based on piezoelectric active sensing method. Appl. Sci. 2016, 6, 320. [Google Scholar] [CrossRef]
- Hernández-Alvarado, R.; García-Valdovinos, L.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Fonseca-Navarro, F. Neural network-based self-tuning PID control for underwater vehicles. Sensors 2016, 16, 1429. [Google Scholar] [CrossRef]
- Li, L.; Song, G.; Ou, J. Nonlinear structural vibration suppression using dynamic neural network observer and adaptive fuzzy sliding mode control. J. Vib. Control 2010, 16, 1503–1526. [Google Scholar] [CrossRef]
- Gharani, P.; Suffoletto, B.; Chung, T.; Karimi, H. An artificial neural network for movement pattern analysis to estimate blood alcohol content level. Sensors 2017, 17, 2897. [Google Scholar] [CrossRef] [PubMed]
- Sun, F.P.; Chaudhry, Z.; Liang, C.; Rogers, C.A. Truss structure integrity identification using PZT sensor-actuator. J. Intell. Mater. Syst. Struct. 1995, 6, 134–139. [Google Scholar] [CrossRef]
- Tao, W.; Shaopeng, L.; Junhua, S.; Yourong, L. Health monitoring of bolted joints using the time reversal method and piezoelectric transducers. Smart Mater. Struct. 2016, 25, 025010. [Google Scholar] [CrossRef]
- Wang, F.; Huo, L.; Song, G. A piezoelectric active sensing method for quantitative monitoring of bolt loosening using energy dissipation caused by tangential damping based on the fractal contact theory. Smart Mater. Struct. 2017, 27, 015023. [Google Scholar] [CrossRef] [Green Version]
- Huo, L.; Chen, D.; Kong, Q.; Li, H.; Song, G. Smart washer—A piezoceramic-based transducer to monitor looseness of bolted connection. Smart Mater. Struct. 2017, 26, 025033. [Google Scholar] [CrossRef]
- Wang, T.; Song, G.; Wang, Z.; Li, Y. Proof-of-concept study of monitoring bolt connection status using a piezoelectric based active sensing method. Smart Mater. Struct. 2013, 22, 087001. [Google Scholar] [CrossRef]
- David, L.M.; Michael, D.T.; Gyuhae, P.; Charles, F. Development of an impedance-based wireless sensor node for structural health monitoring. Smart Mater. Struct. 2007, 16, 2137. [Google Scholar]
- Annamdas, V.G.M. Characterization of Smart PZT Transducer and Admittance Signatures Using PZT-Structure Interaction Models for Structural Health Monitoring. Ph.D. Thesis, Nanyang Technologocal University, Singpore, 2007. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Torque Level | 2.5 lb·ft | 5.0 lb·ft | 7.5 lb·ft | 10.0 lb·ft | 12.5 lb·ft | 15.0lb·ft | 17.5 lb·ft | Testing Results | |
|---|---|---|---|---|---|---|---|---|---|
| Testing Samples | |||||||||
| Looseness degree 1 | 1 |  | 8.53 × 10−6(0) | 5.05 × 10−6(0) | 6.29 × 10−11(0) | 2.43 × 10−13(0) | 2.78 × 10−16(0) | 6.20 × 10−6(0) | true |
| 2 | | 9.03 × 10−6(0) | 4.95 × 10−6(0) | 7.13 × 10−11(0) | 2.82 × 10−13(0) | 2.78 × 10−16(0) | 5.51 × 10−6(0) | true | |
| 3 | | 9.09 × 10−6(0) | 4.88 × 10−6(0) | 7.06 × 10−11(0) | 2.66 × 10−13(0) | 2.78 × 10−16(0) | 5.92 × 10−6(0) | true | |
| Looseness degree 2 | 1 | 8.16 × 10−6(0) | | 3.06 × 10−6(0) | 4.17 × 10−6(0) | 1.04 × 10−7(0) | 0(0) | 4.45 × 10−6(0) | true |
| 2 | 7.52 × 10−6(0) | | 2.98 × 10−6(0) | 5.11 × 10−6(0) | 1.33 × 10−7(0) | 0(0) | 3.41 × 10−6(0) | true | |
| 3 | 6.86 × 10−6(0) | | 2.86 × 10−6(0) | 6.55 × 10−6(0) | 1.77 × 10−7(0) | 0(0) | 2.50 × 10−6(0) | true | |
| Looseness degree 3 | 1 | 4.16 × 10−6(0) | 1.00 × 10−5(0) | | 1.22 × 10−5(0) | 1.75 × 10−6(0) | 1.37 × 10−7(0) | 0(0) | true |
| 2 | 4.16 × 10−6(0) | 8.88 × 10−6(0) | | 9.83 × 10−6(0) | 1.90 × 10−6(0) | 2.51 × 10−7(0) | 0(0) | true | |
| 3 | 4.31 × 10−6(0) | 9.41 × 10−6(0) | | 9.90 × 10−6(0) | 1.61 × 10−6(0) | 2.21 × 10−7(0) | 0(0) | true | |
| Looseness degree 4 | 1 | 1.92 × 10−7(0) | 6.00 × 10−6(0) | 1.96 × 10−5(0) | | 2.46 × 10−5(0) | 1.31 × 10−5(0) | 5.22 × 10−15(0) | true |
| 2 | 1.93 × 10−7(0) | 6.05 × 10−6(0) | 2.00 × 10−5(0) | | 2.46 × 10−5(0) | 1.32 × 10−5(0) | 5.11 × 10−15(0) | true | |
| 3 | 1.95 × 10−7(0) | 5.96 × 10−6(0) | 2.08 × 10−5(0) | | 2.42 × 10−5(0) | 1.33 × 10−5(0) | 5.00 × 10−15(0) | true | |
| Looseness degree 5 | 1 | 2.42 × 10−8(0) | 3.22 × 10−6(0) | 2.49 × 10−6(0) | 1.31 × 10−5(0) | | 4.52 × 10−7(0) | 9.73 × 10−7(0) | true |
| 2 | 2.38 × 10−8(0) | 2.09 × 10−6(0) | 4.22 × 10−6(0) | 2.23 × 10−5(0) | | 1.77 × 10−6(0) | 2.31 × 10−7(0) | true | |
| 3 | 2.42 × 10−8(0) | 2.95 × 10−6(0) | 2.74 × 10−6(0) | 1.46 × 10−5(0) | | 5.80 × 10−7(0) | 7.42 × 10−7(0) | true | |
| Looseness degree 6 | 1 | 4.26 × 10−6(0) | 7.14 × 10−8(0) | 6.26 × 10−6(0) | 1.12 × 10−5(0) | 1.34 × 10−6(0) |  | 1.42 × 10−4(0) | true |
| 2 | 4.37 × 10−6(0) | 6.20 × 10−8(0) | 7.22 × 10−6(0) | 1.35 × 10−5(0) | 1.07 × 10−6(0) |  | 9.85 × 10−5(0) | true | |
| 3 | 4.57 × 10−6(0) | 6.10 × 10−8(0) | 6.83 × 10−6(0) | 1.24 × 10−5(0) | 9.46 × 10−7(0) | | 1.30 × 10−4(0) | true | |
| Looseness degree 7 | 1 | 6.56 × 10−6(0) | 3.27 × 10−5(0) | 2.22 × 10−9(0) | 2.88 × 10−8(0) | 1.33 × 10−5(0) | 1.15 × 10−5(0) | | true |
| 2 | 6.70 × 10−6(0) | 2.90 × 10−5(0) | 2.55 × 10−9(0) | 4.83 × 10−8(0) | 8.90 × 10−6(0) | 1.87 × 10−5(0) | | true | |
| 3 | 6.60 × 10−6(0) | 2.17 × 10−5(0) | 3.74 × 10−9(0) | 6.65 × 10−8(0) | 7.71 × 10−6(0) | 4.91 × 10−5(0) | | true |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Dong, J.; Li, H.; Zhang, C.; Ho, S.C. Looseness Monitoring of Bolted Spherical Joint Connection Using Electro-Mechanical Impedance Technique and BP Neural Networks. Sensors 2019, 19, 1906. https://doi.org/10.3390/s19081906
Xu J, Dong J, Li H, Zhang C, Ho SC. Looseness Monitoring of Bolted Spherical Joint Connection Using Electro-Mechanical Impedance Technique and BP Neural Networks. Sensors. 2019; 19(8):1906. https://doi.org/10.3390/s19081906
Chicago/Turabian StyleXu, Jing, Jinhui Dong, Hongnan Li, Chunwei Zhang, and Siu Chun Ho. 2019. "Looseness Monitoring of Bolted Spherical Joint Connection Using Electro-Mechanical Impedance Technique and BP Neural Networks" Sensors 19, no. 8: 1906. https://doi.org/10.3390/s19081906
APA StyleXu, J., Dong, J., Li, H., Zhang, C., & Ho, S. C. (2019). Looseness Monitoring of Bolted Spherical Joint Connection Using Electro-Mechanical Impedance Technique and BP Neural Networks. Sensors, 19(8), 1906. https://doi.org/10.3390/s19081906