The Compass Error Comparison of an Onboard Standard Gyrocompass, Fiber-Optic Gyrocompass (FOG) and Satellite Compass



Abstract
:
1. Introduction
2. Materials and Methods
2.1. Background
2.2. The Scope of Research
3. Results
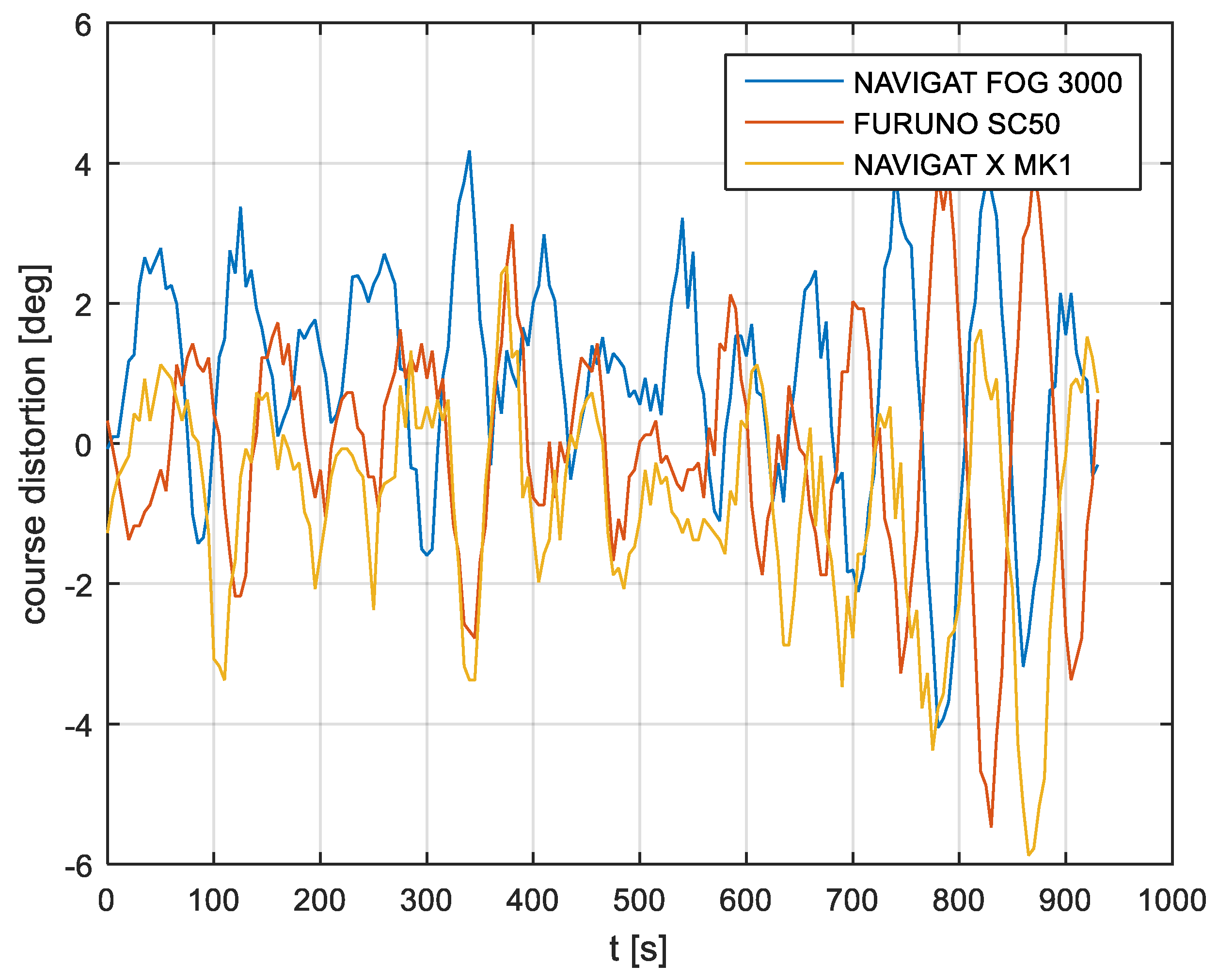
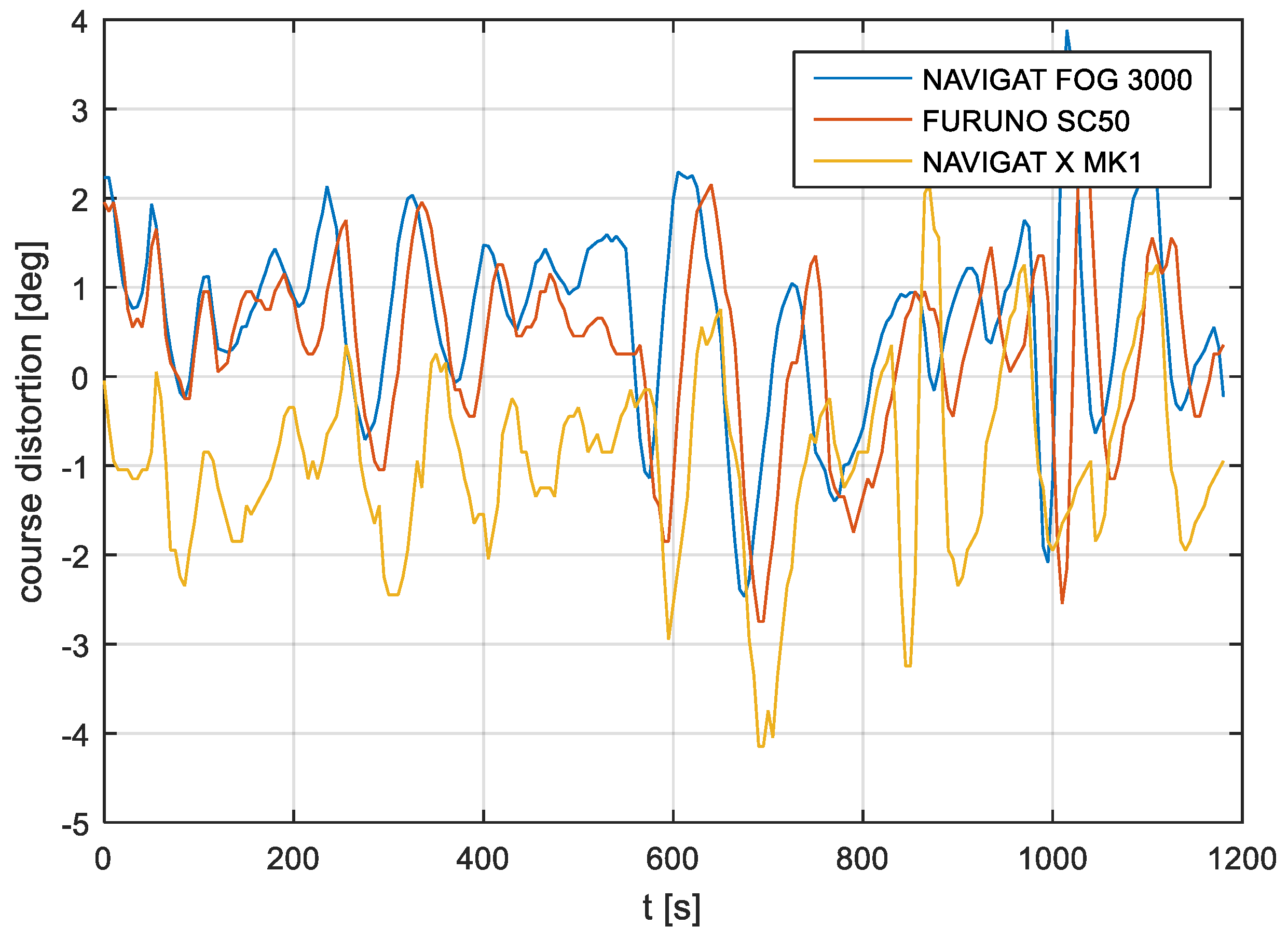
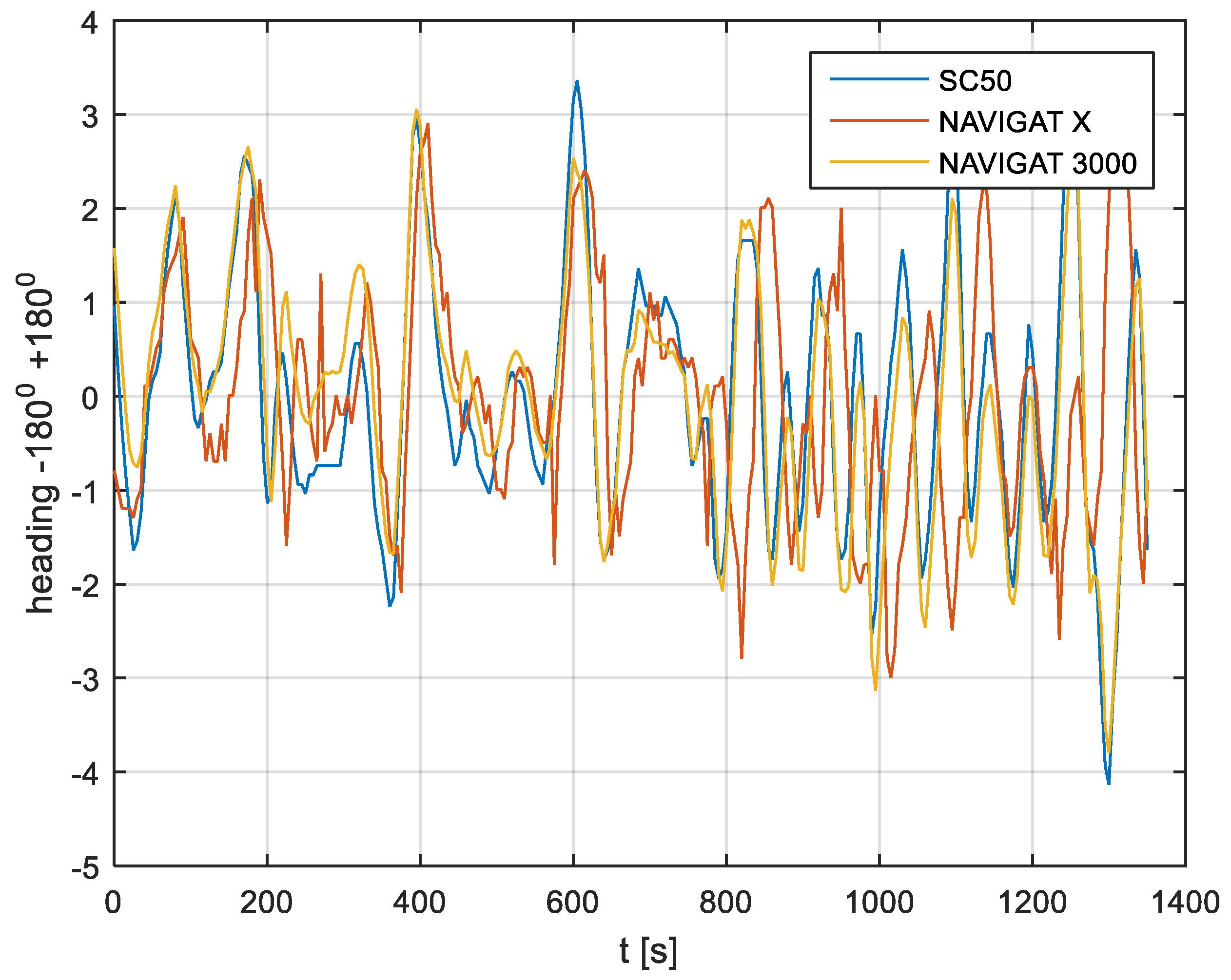
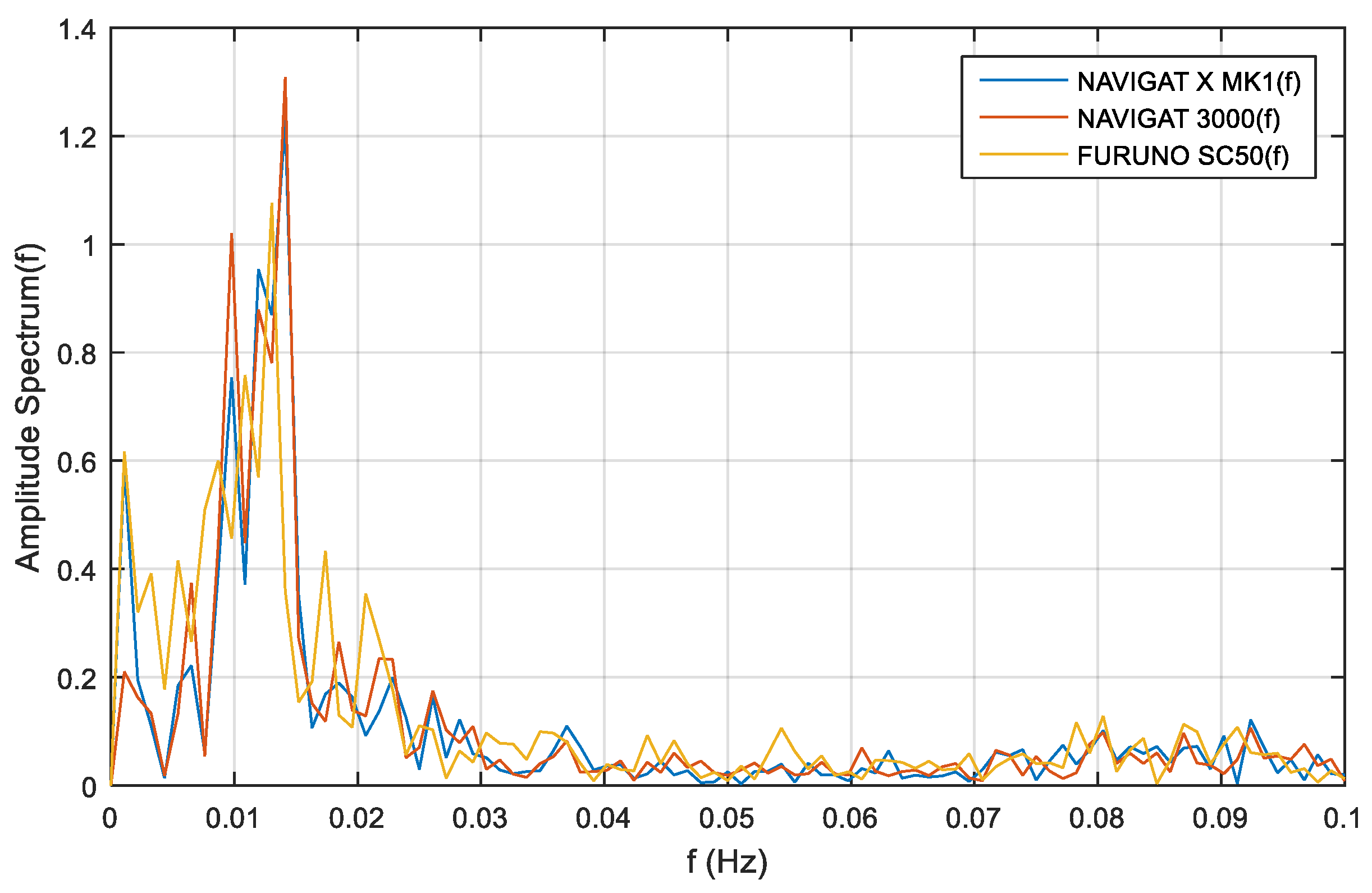
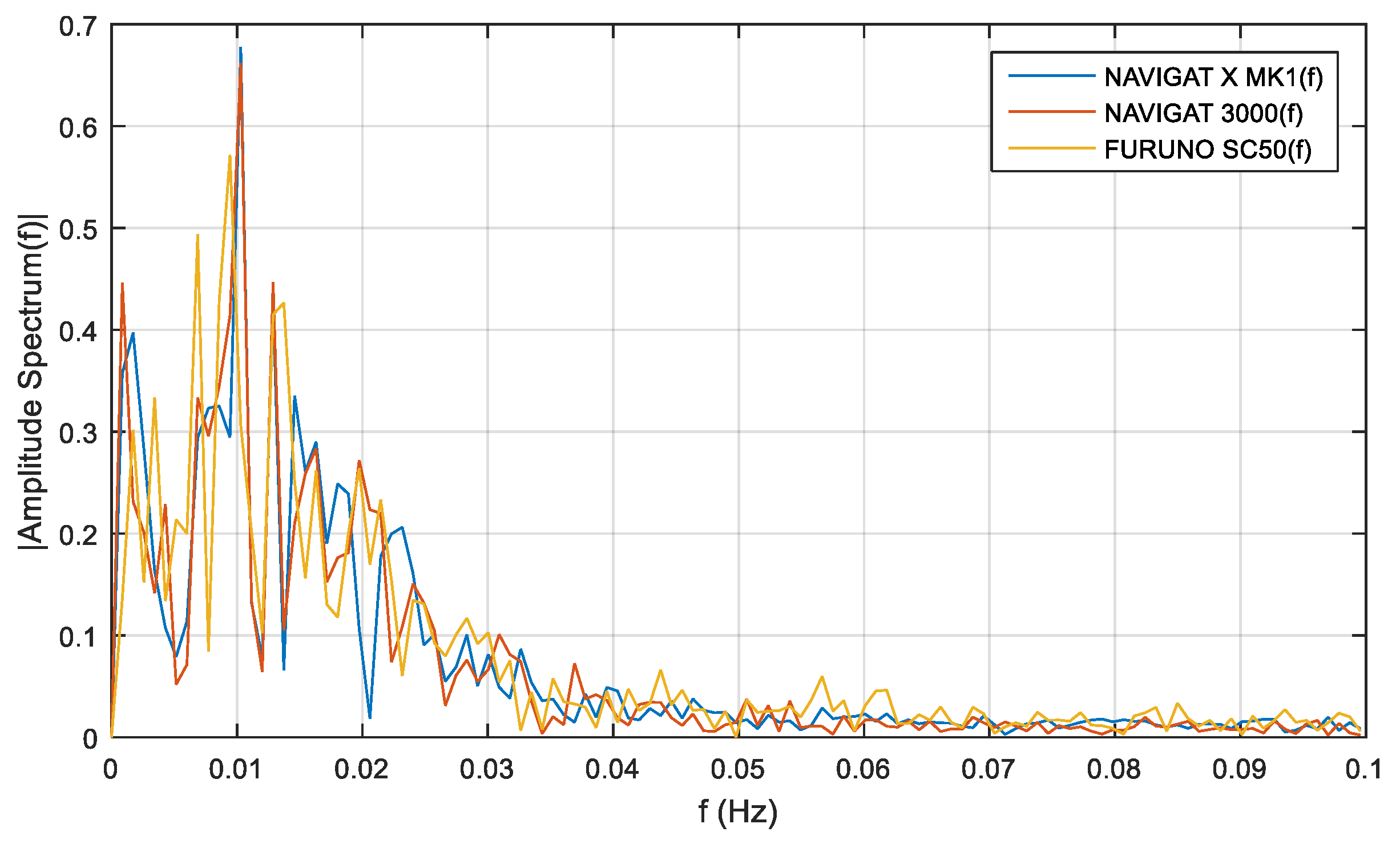
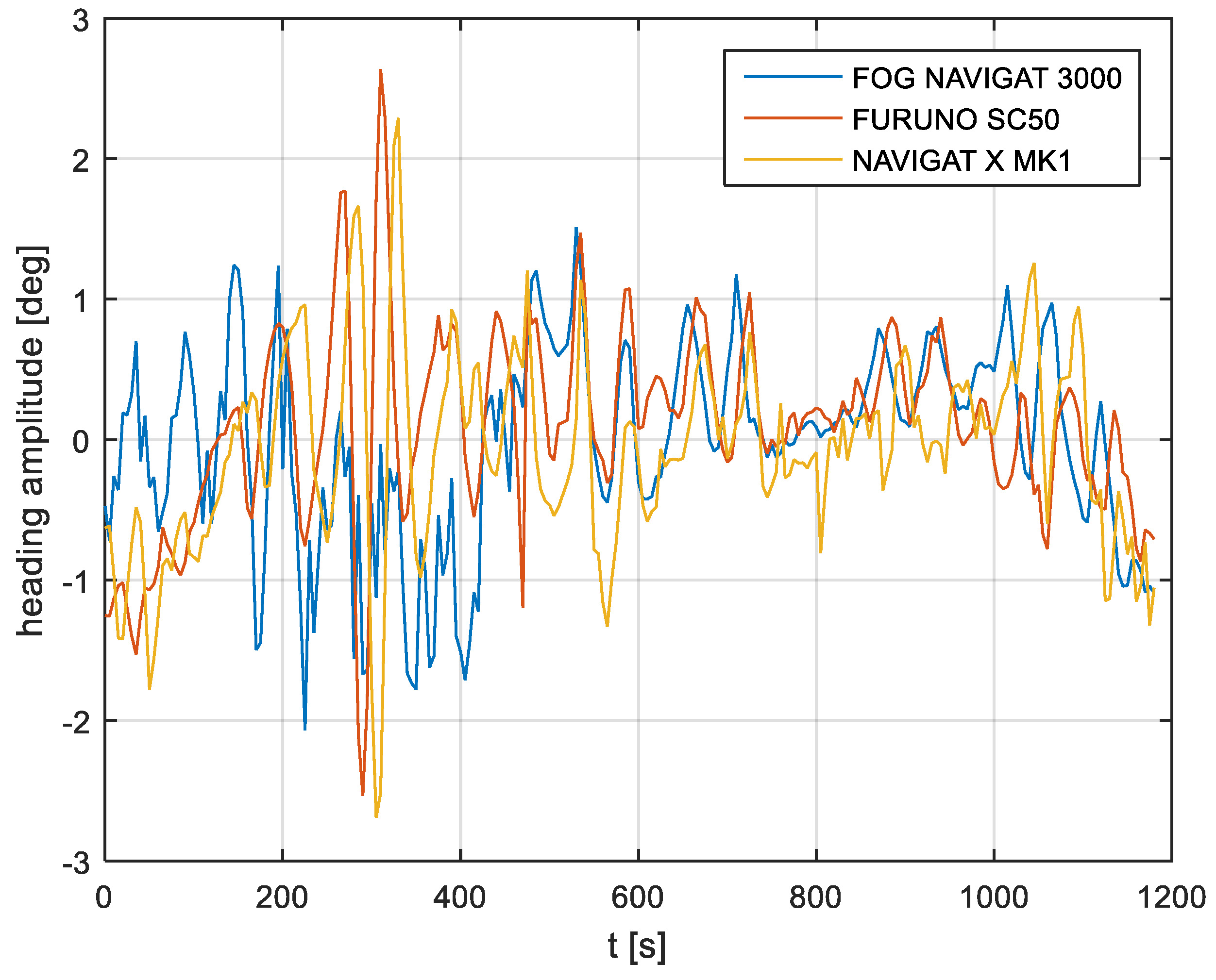
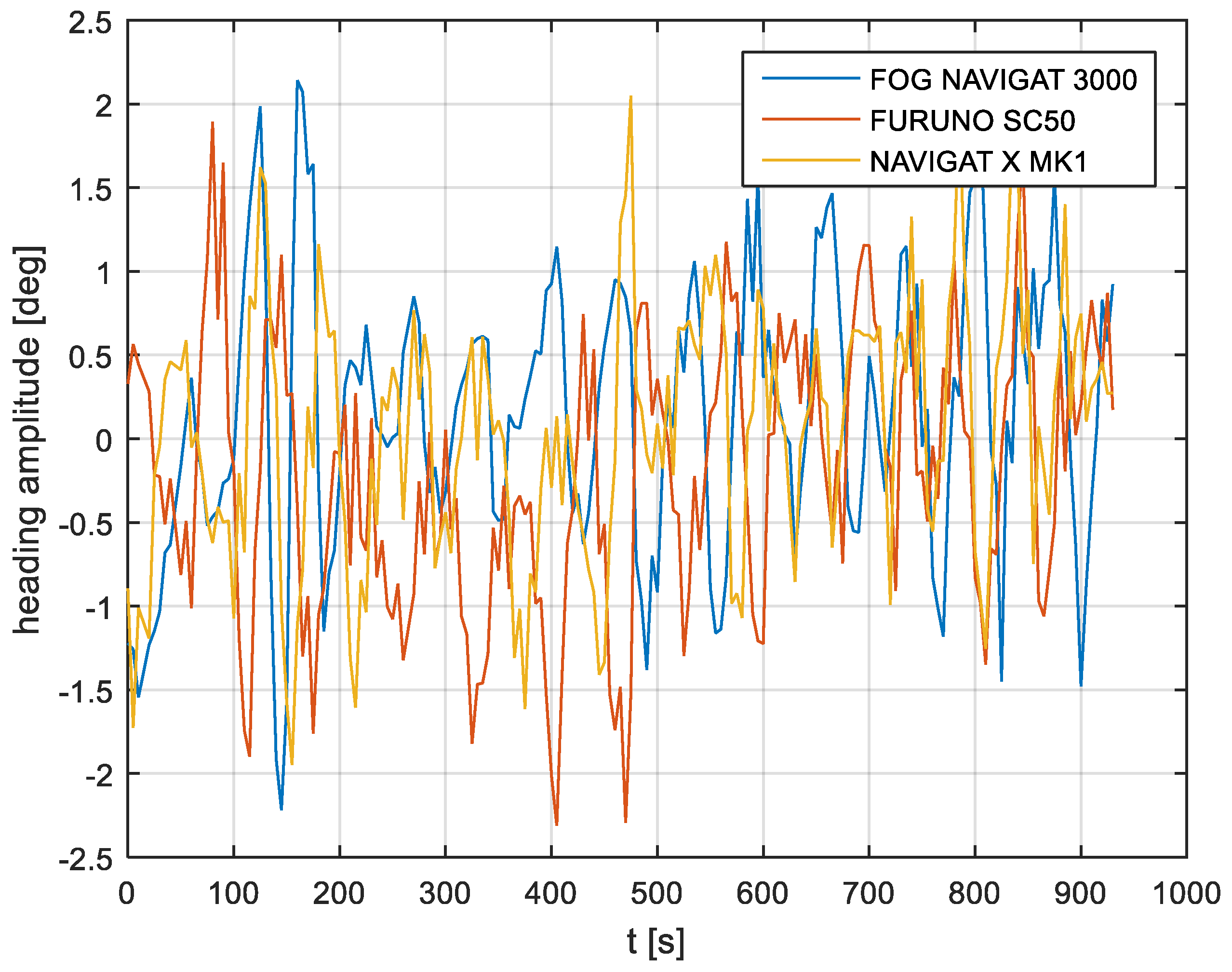
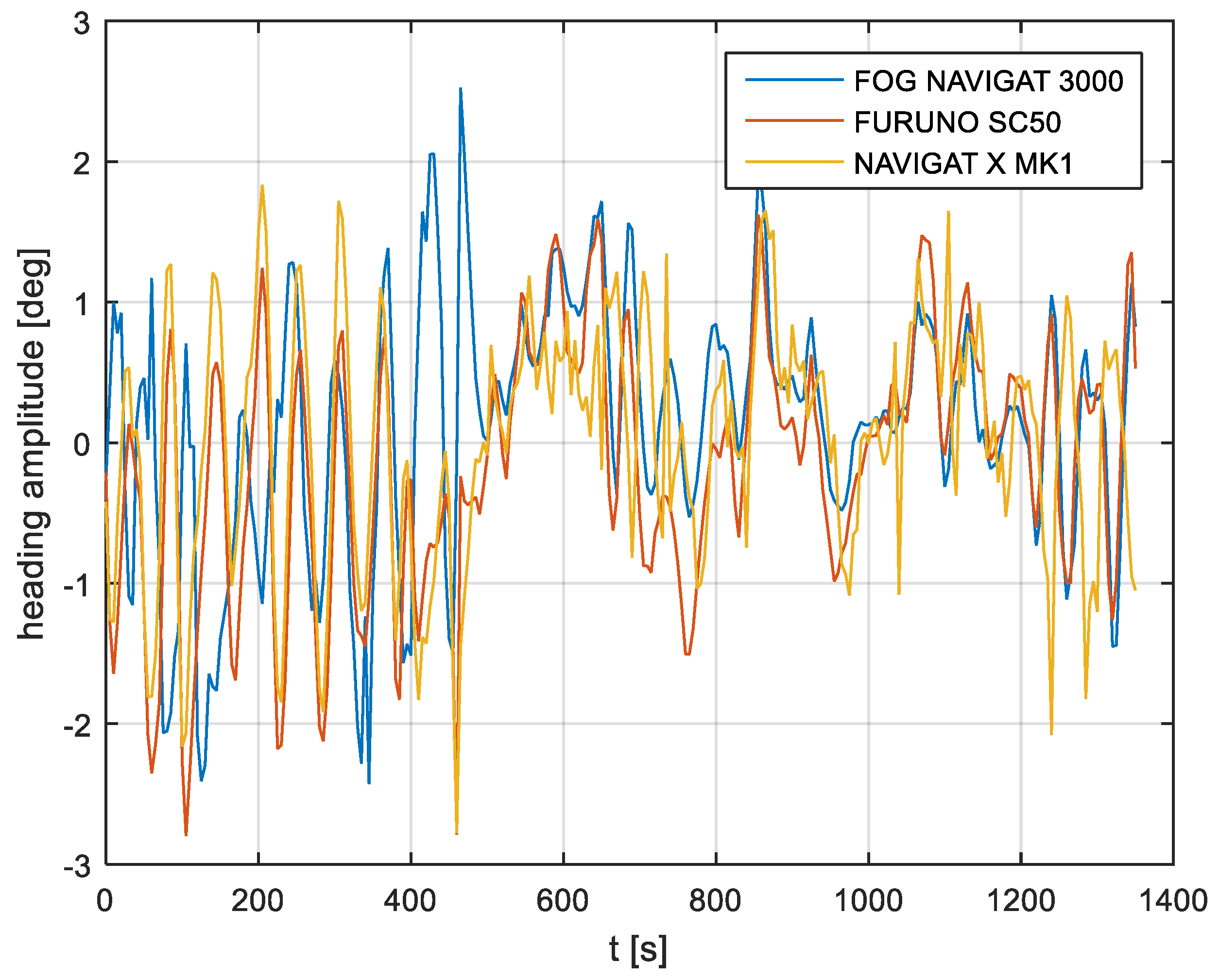
3.1. Transient Characteristics and Spectrum Analysis
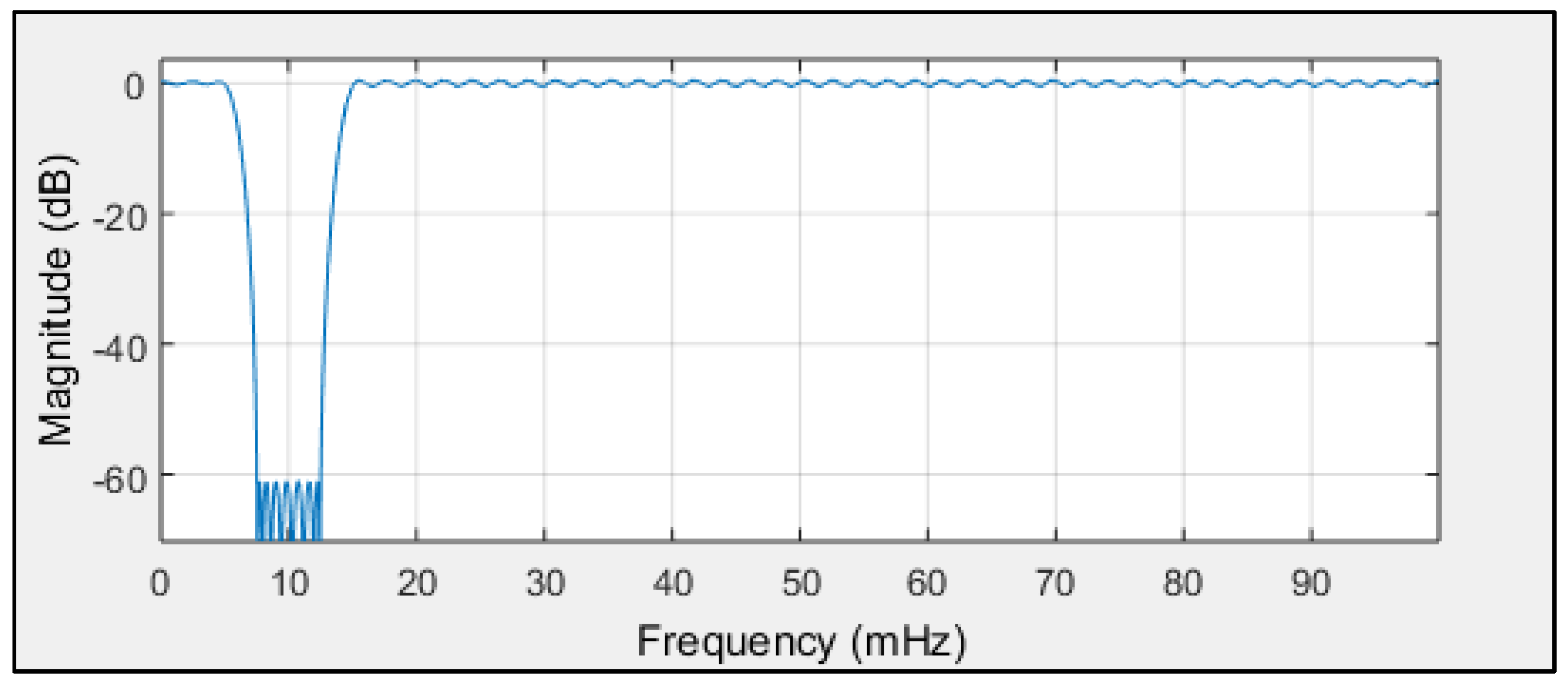
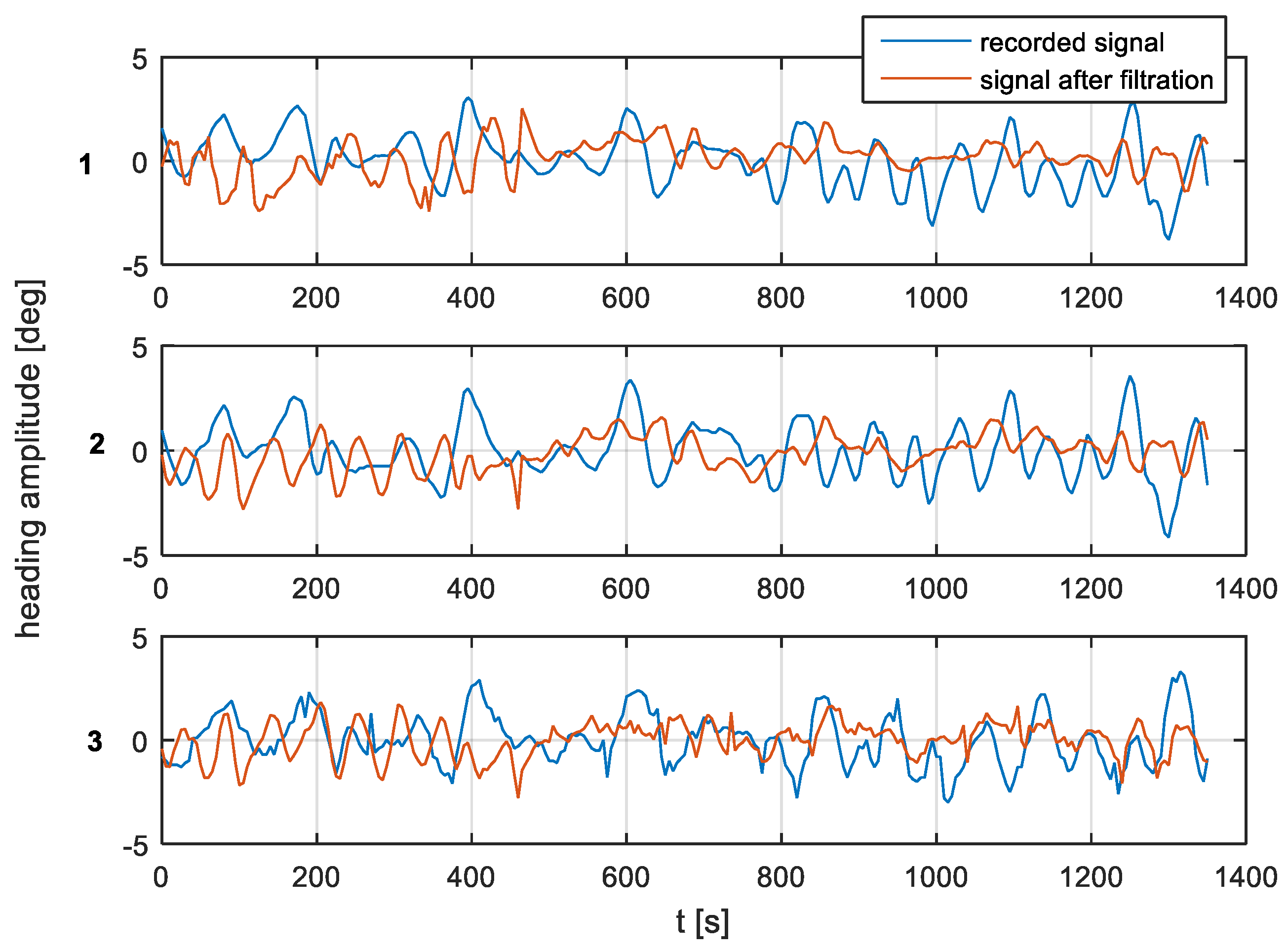
3.2. The Model of the Band-Stop Filter with the Finite Impulse Response (FIR)
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Felski, A. Gyrocompasses—Their Condition and Direction of Development. TransNav 2008, 2, 55–59. [Google Scholar]
- Szymak, P.; Malec, M.; Morawski, M. Directions of development of underwater vehicle with undulating propulsion. Pol. J. Environ. Stud. 2010, 19, 107–110. [Google Scholar]
- Praczyk, T. Correction of navigational information supplied to biomimetic autonomous underwater vehicle. Pol. Marit. Res. 2018, 1, 13–23. [Google Scholar] [CrossRef]
- Felski, A. Exploitative properties of different types of satellite compasses. Annu. Navig. 2010, 16, 33–40. [Google Scholar]
- Felski, A.; Nowak, A. Practical experiences from the use of the satellite compass. In Proceedings of the ENC Conference, Parthenope University, Naples, Italy, 4–6 May 2009. [Google Scholar]
- Felski, A.; Mięsikowski, M. Some Method of Determining the Characteristic Frequencies of Ship’s Yawing and Errors of Ship’s Compasses During the Sea-Trials. Annu. Navig. 2000, 2, 17–24. [Google Scholar]
- Spielvogel, A.R.; Whitcomb, L.L. Preliminary Results with a Low-Cost Fiber-Optic Gyrocompass System. In Proceedings of the OCEANS MTS/IEEE Conference, Washington, DC, USA, 19–22 October 2015. [Google Scholar]
- Johnson, B.R.; Cabuz, E.; French, H.B.; Supino, R. Development of a MEMS Gyroscope for Northfinding Applications. In Proceedings of the IEEE-ION Position Location and Navigation Symposium, Palm Springs, CA, USA, 4–6 May 2010. [Google Scholar]
- Ueno, M.; Santerre, R.; Babineau, S. Impact of the Antenna Configuration on GPS Attitude Determination. In Proceedings of the 9th World Congress of the International Association of the Institutes of Navigation, Amsterdam, The Netherlands, 18–21 November 1997. [Google Scholar]
- Goodall, C.; Scannel, B. The Battle between MEMS and FOGs for Precision Guidance. Available online: https://www.analog.com/en/technical-articles/the-battle-between-mems-and-fogs-for-precision-guidance.html (accessed on 25 December 2018).
- Niu, X.; Nassar, S.; Syed, Z.; Goodall, C.; El-Sheimy, N. The Development of A MEMS-Based Inertial/GPS System for Land-Vehicle Navigation Applications. In Proceedings of the 19th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2006), Fort Worth, TX, USA, 26–29 September 2006; pp. 1516–1525. [Google Scholar]
- Groves, P.D. Principles of GPS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Boston, MA, USA, 2008; pp. 58–521. [Google Scholar]
- Britting, K.R. Inertial Navigation Systems Analysis; Artech House: Boston, MA, USA, 2010; pp. 22–249. [Google Scholar]
- Basterretxea-Iribar, I.; Sotes, I.; Uriarte, J.I. Towards an Improvement of Magnetic Compass Accuracy and Adjustment. J. Navig. 2015, 69, 1325–1340. [Google Scholar] [CrossRef]
- Sperry Marine. Operation, Installation and Service Manual NAVIGAT 3000 Fiber-Optic Gyrocompass and Altitude Reference System; Sperry Marine: Hamburg, Germany, 2014; pp. 9–98. [Google Scholar]
- Furuno Electric CO. LTD: Operator’s Manual, The Satellite Compass SC-50; Furuno: Nishinomiya, Japan, 2011; pp. 7–101. [Google Scholar]
- Sperry Marine. Operation, Installation and Service Manual NAVIGAT X MK1 Digital Gyrocompass Systems; Sperry Marine: Hamburg, Germany, 2013; pp. 16–180. [Google Scholar]
- Comp, C. Optimal Antenna Configuration for GPS Based Attitude Determination. In Proceedings of the ION-GPS, Salt Lake City, UT, USA, 22–24 September 1993. [Google Scholar]
- Mięsikowski, M.; Felski, A. Some Aspects of DGPS Based Heading Determination. Geodezja Kartografia 1999, XLVIII, 97–104. [Google Scholar]
- Oppenheim, A.V.; Schafer, R.W. Discrete-Time Signal Processing, 2nd ed.; Prentice-Hall: New Jersey, NY, USA, 1989; pp. 541–755. [Google Scholar]
- Otnes, R.K.; Enochson, L. Analiza Numeryczna Szeregów Czasowych, 1st ed.; Wydawnictwo Naukowo-Techniczne: Warsaw, Poland, 1978; pp. 122–258. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Type of Compass | Mean Error [deg.] |
|---|---|
| NAVIGAT FOG 3000 | 1.4 |
| FURUNO SC50 | 0.9 |
| NAVIGAT X MK1 | 0.7 |
| Test Number | NAVIGAT FOG 3000 [deg.] | FURUNO SC 50 [deg.] | NAVIGAT X MK1 [deg.] |
|---|---|---|---|
| Test No. 4 | 1.53 | 1.23 | 1.30 |
| Test No. 6 | 1.34 | 1.30 | 1.00 |
| Test No. 7 | 1.02 | 0.88 | 1.18 |
| Test Number | NAVIGAT FOG 3000 [deg.] | FURUNO SC 50 [deg.] | NAVIGAT X MK1 [deg.] |
|---|---|---|---|
| Test No. 4 | −0.10 | 0.01 | −0.15 |
| Test No. 6 | 0.13 | −0.15 | 0.02 |
| Test No. 7 | 0.14 | 0.01 | −0.15 |
| Test Number | NAVIGAT FOG 3000 [deg.] | FURUNO SC 50 [deg.] | NAVIGAT X MK1 [deg.] |
|---|---|---|---|
| Test No. 4 | 0.54 | 0.52 | 0.52 |
| Test No. 6 | 0.71 | 0.70 | 0.68 |
| Test No. 7 | 0.48 | 0.51 | 0.53 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaskólski, K.; Felski, A.; Piskur, P. The Compass Error Comparison of an Onboard Standard Gyrocompass, Fiber-Optic Gyrocompass (FOG) and Satellite Compass. Sensors 2019, 19, 1942. https://doi.org/10.3390/s19081942
Jaskólski K, Felski A, Piskur P. The Compass Error Comparison of an Onboard Standard Gyrocompass, Fiber-Optic Gyrocompass (FOG) and Satellite Compass. Sensors. 2019; 19(8):1942. https://doi.org/10.3390/s19081942
Chicago/Turabian StyleJaskólski, Krzysztof, Andrzej Felski, and Paweł Piskur. 2019. "The Compass Error Comparison of an Onboard Standard Gyrocompass, Fiber-Optic Gyrocompass (FOG) and Satellite Compass" Sensors 19, no. 8: 1942. https://doi.org/10.3390/s19081942
APA StyleJaskólski, K., Felski, A., & Piskur, P. (2019). The Compass Error Comparison of an Onboard Standard Gyrocompass, Fiber-Optic Gyrocompass (FOG) and Satellite Compass. Sensors, 19(8), 1942. https://doi.org/10.3390/s19081942