Localization of Sliding Movements Using Soft Tactile Sensing Systems with Three-axis Accelerometers


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- (1)
- We integrated our proposed idea, design, and fabrication of a soft tactile sensing system a pneumatic actuator and a three-axis accelerometer as a sensing element for detecting and localization sliding movements in a large contact area.
- (2)
- We clarified the operation principle of our sensing system and conducted a numerical simulation to study the dynamic responses of the sensing elements under a sliding motion with morphological changes.
- (3)
- We proposed dynamic analyses and interpolated functions based on experiment results to verify the sensing system’s ability.
- (4)
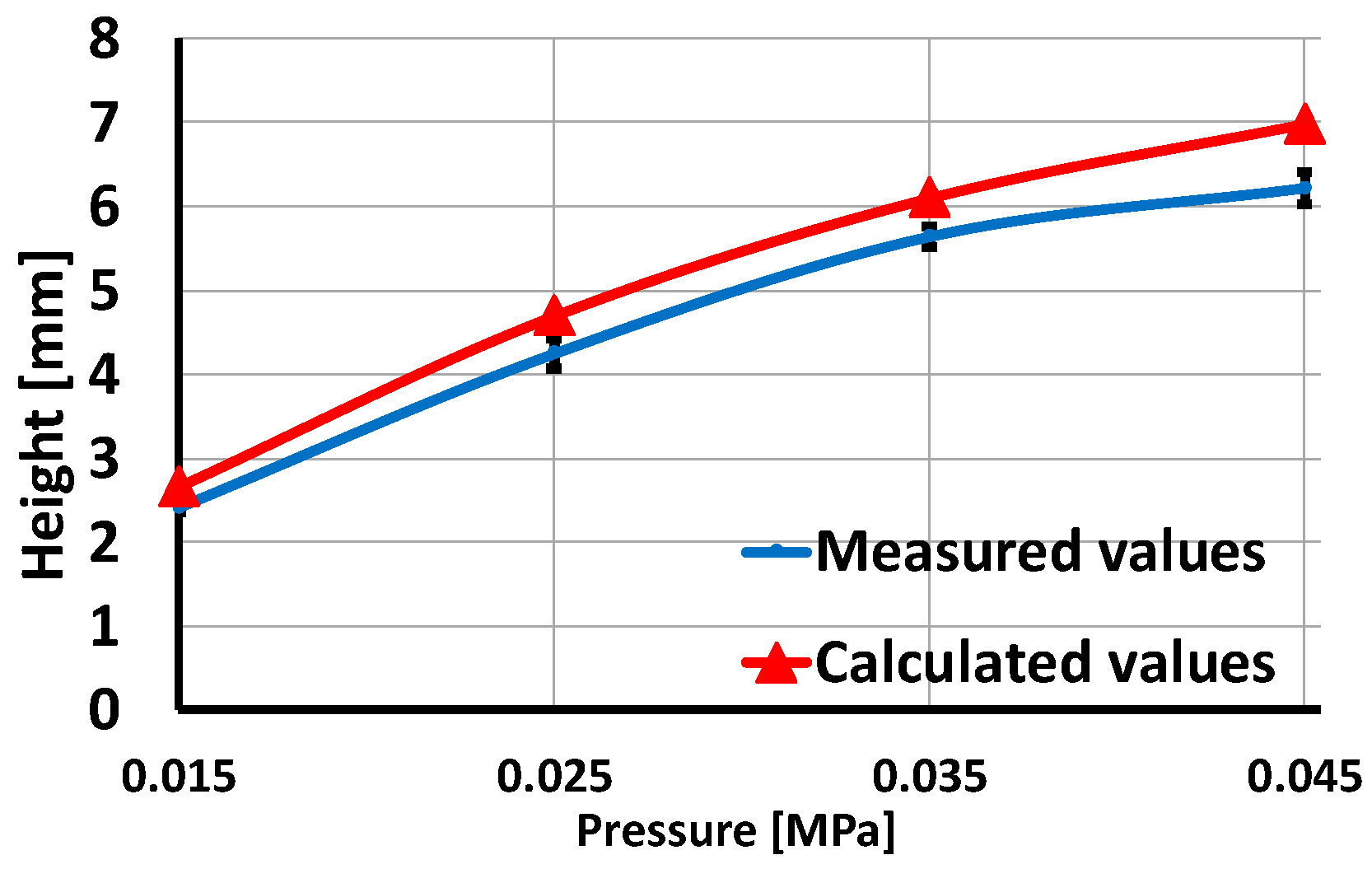
- We elaborated the role of pressurization on the response of the sensing system under sliding movements.
2. Materials and Methods
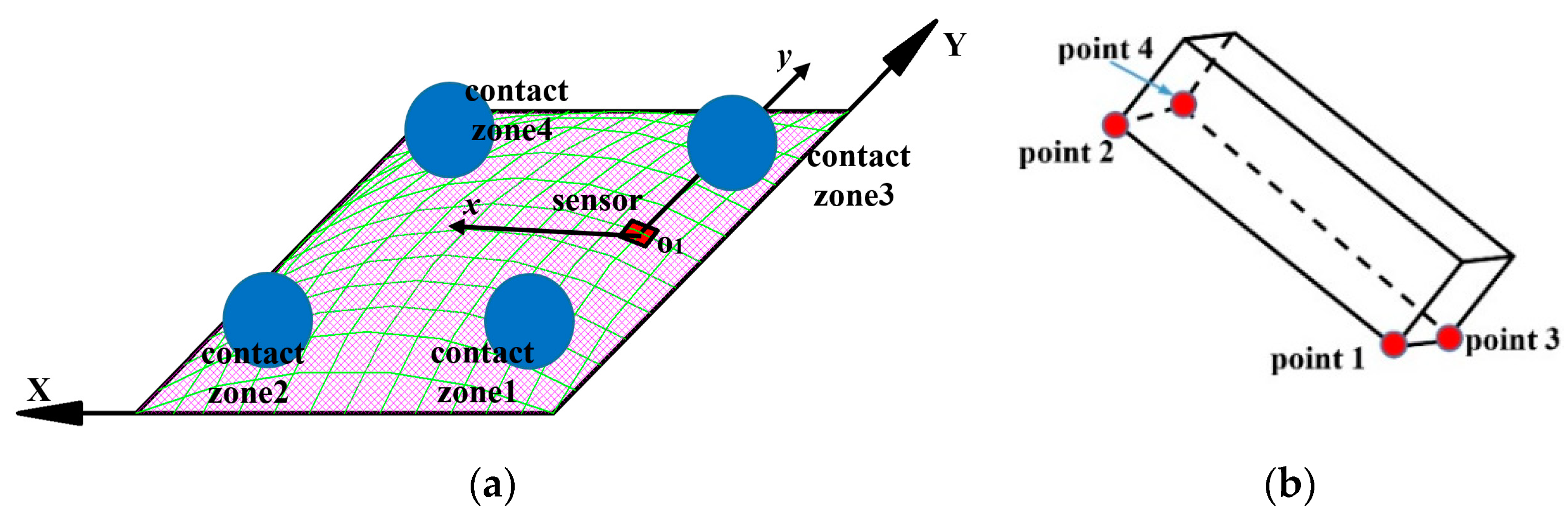
2.1. Idea
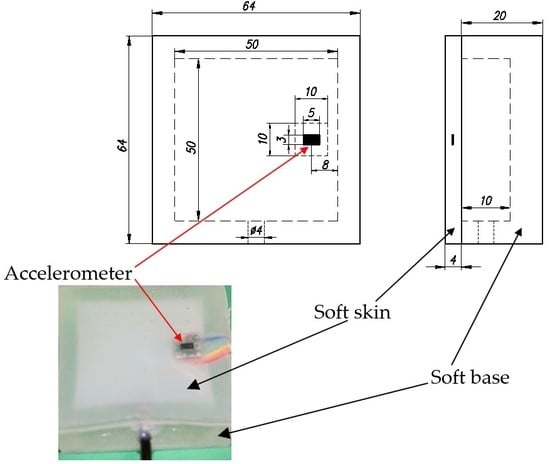
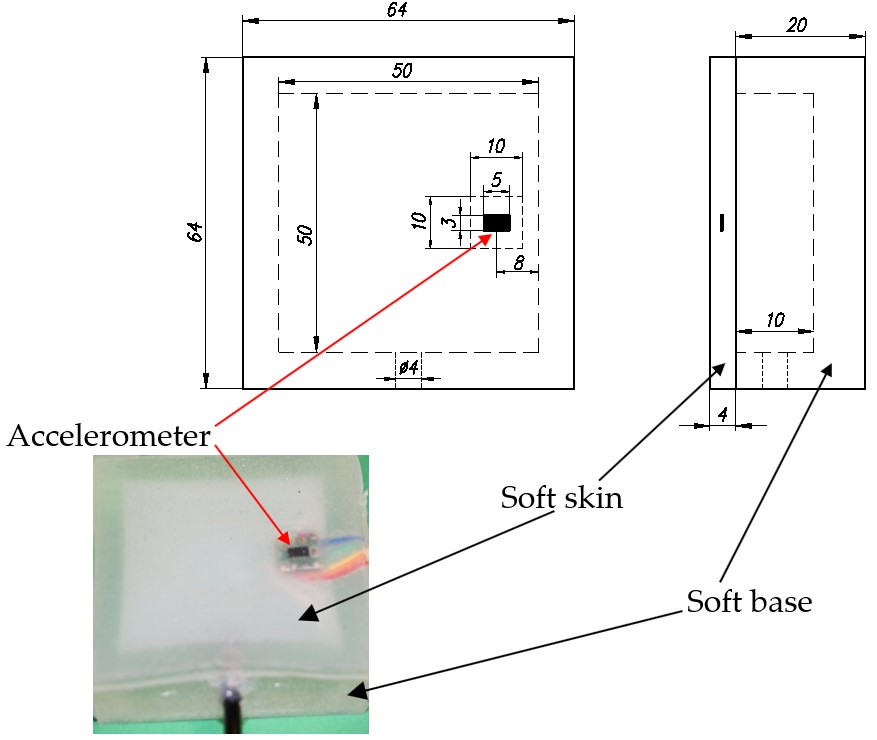
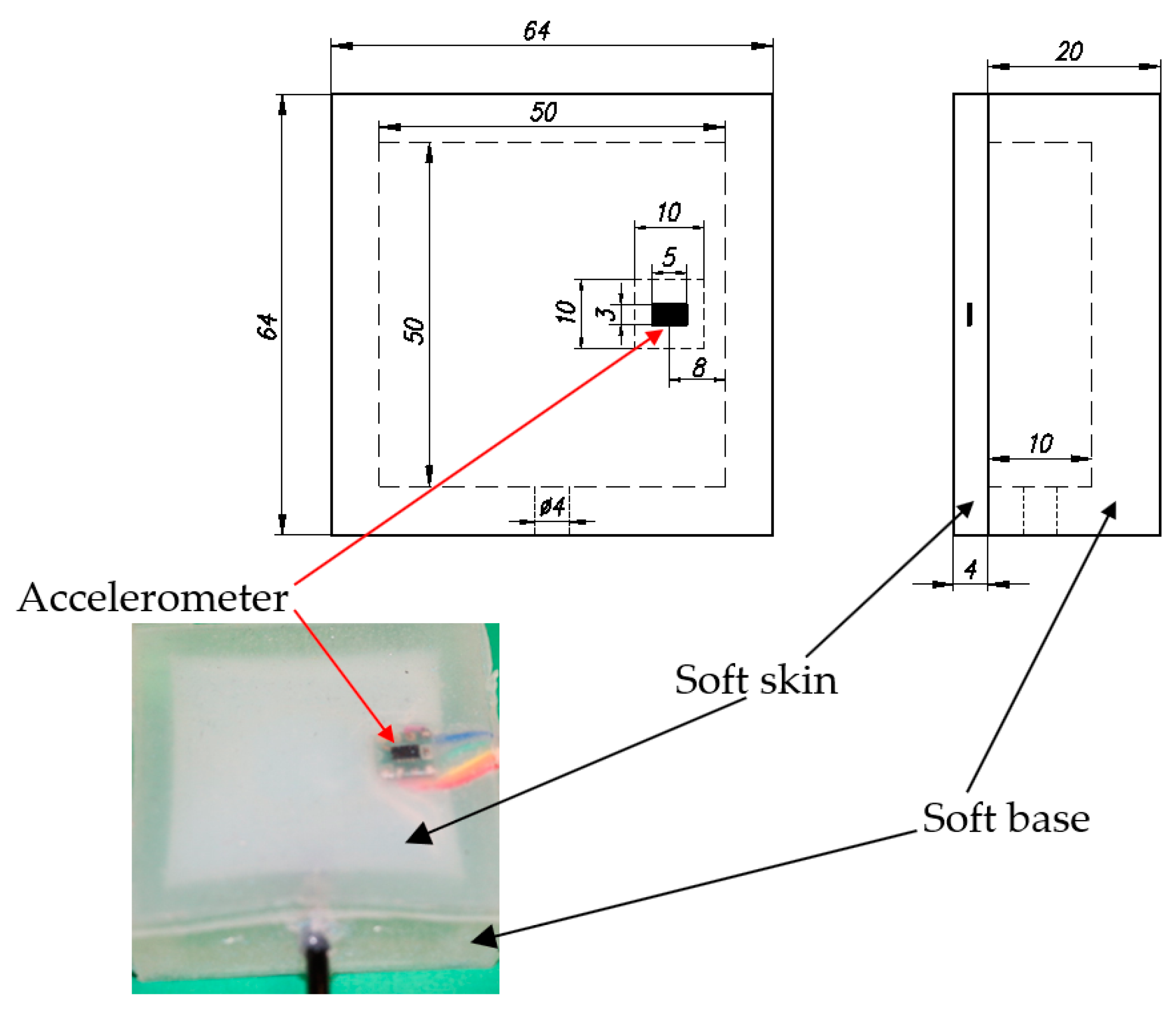
2.2. Design and Fabrication
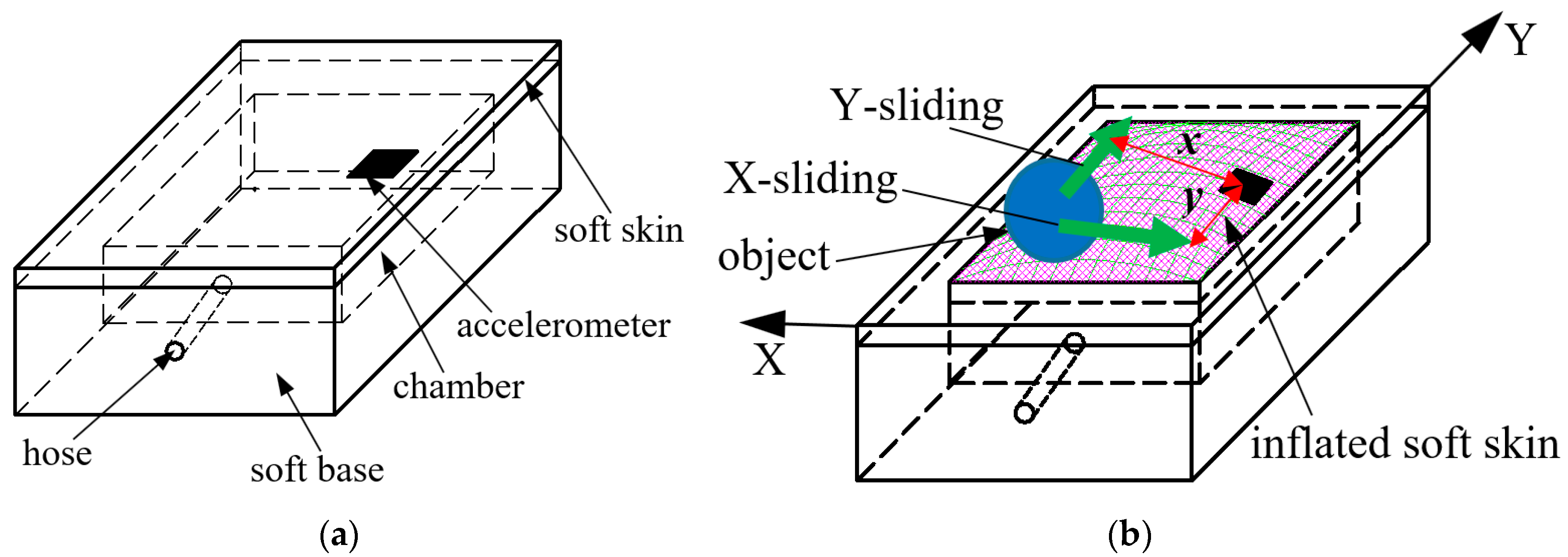
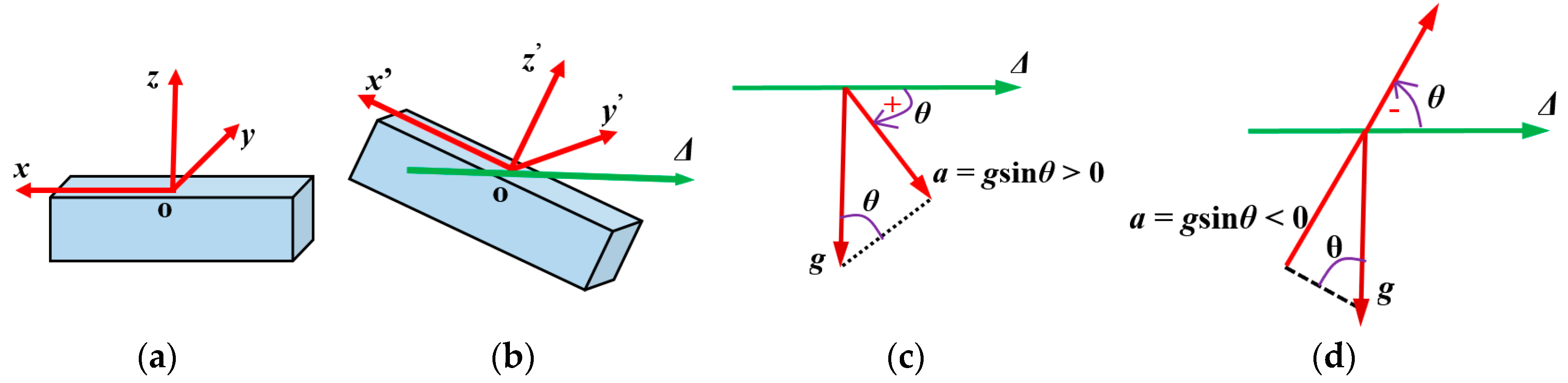
2.3. Operation Principle
3. Numerical Simulation
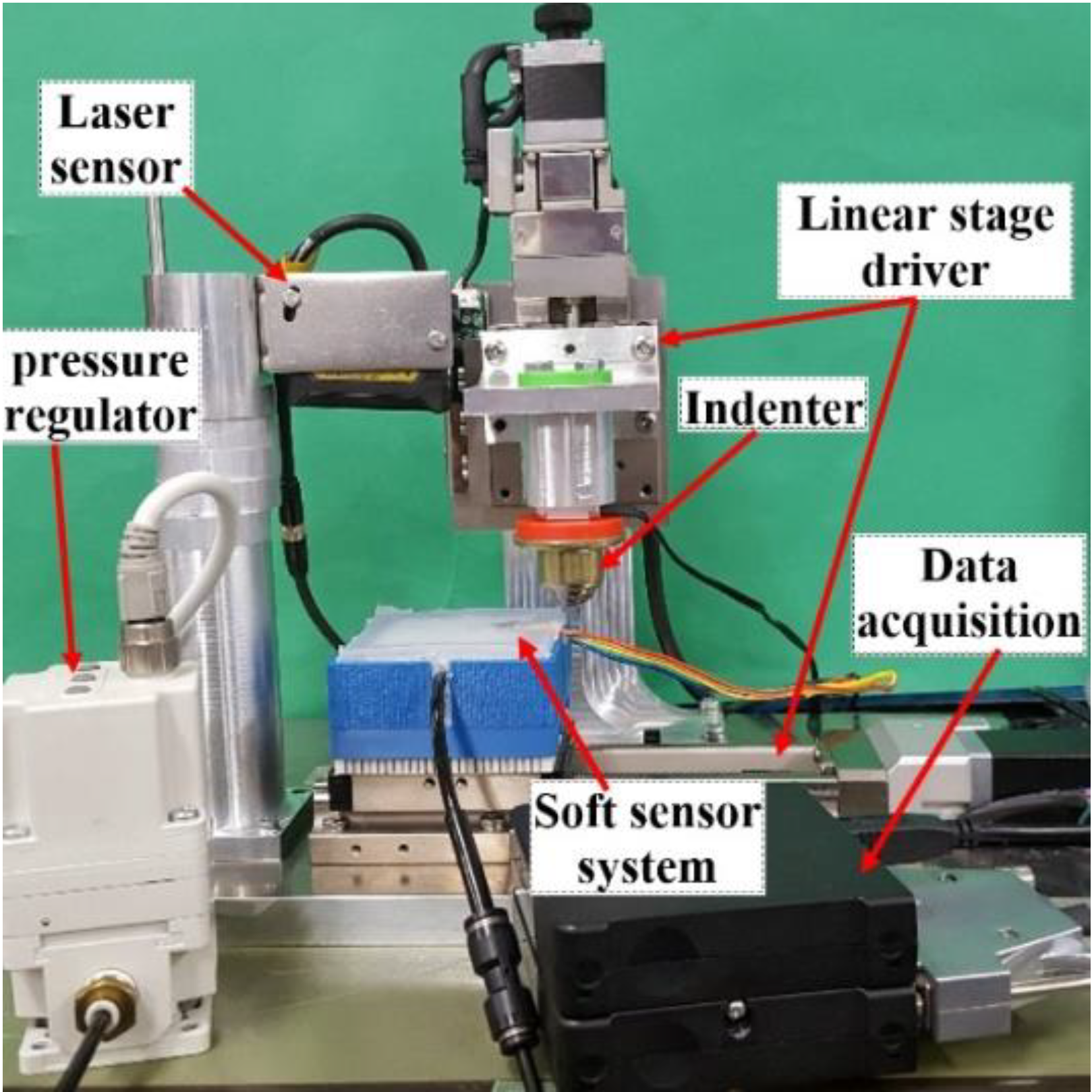
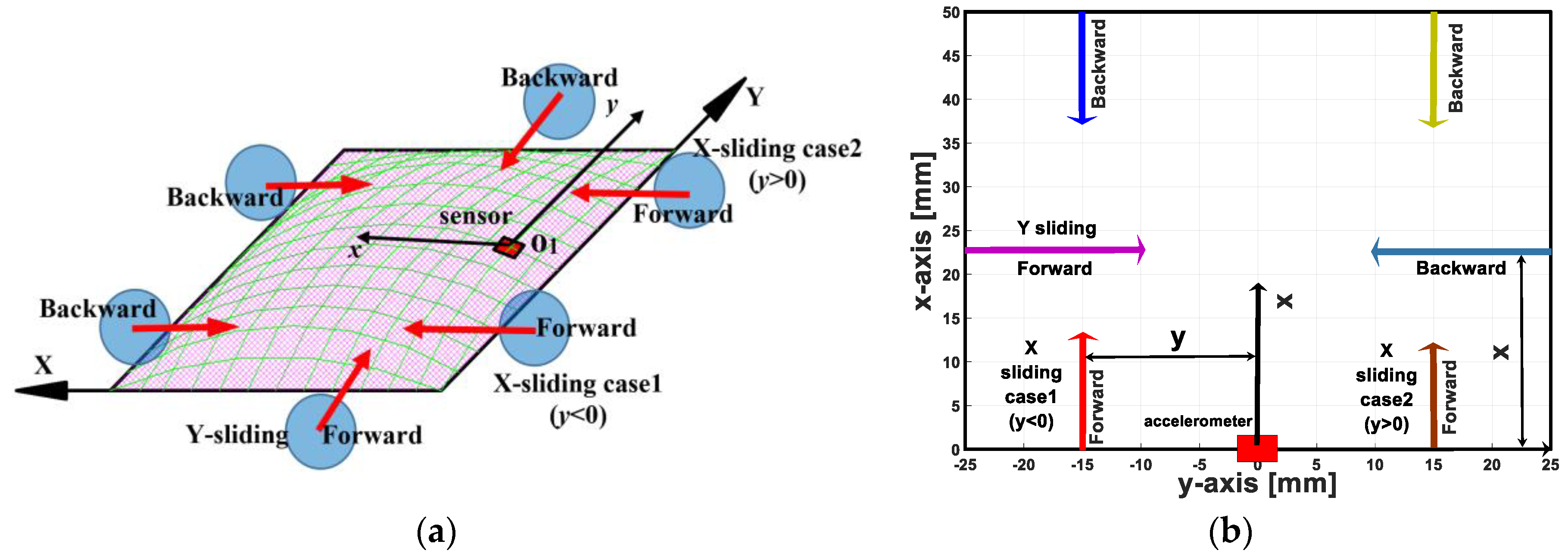
4. Experimental Setup
- -
- With X-sliding case: Distance value increased from 0 to 25 mm or from −25 to 0 mm with increased 2.5-mm steps.
- -
- With Y-sliding case: Distance value rose from 0 to 25 mm with increased 2.5-mm steps. At a particular distance, the sliding motions were conducted with various velocities from 0.5 to 4 mm/s with increased steps of 0.5 mm/s.
5. Results and Discussion
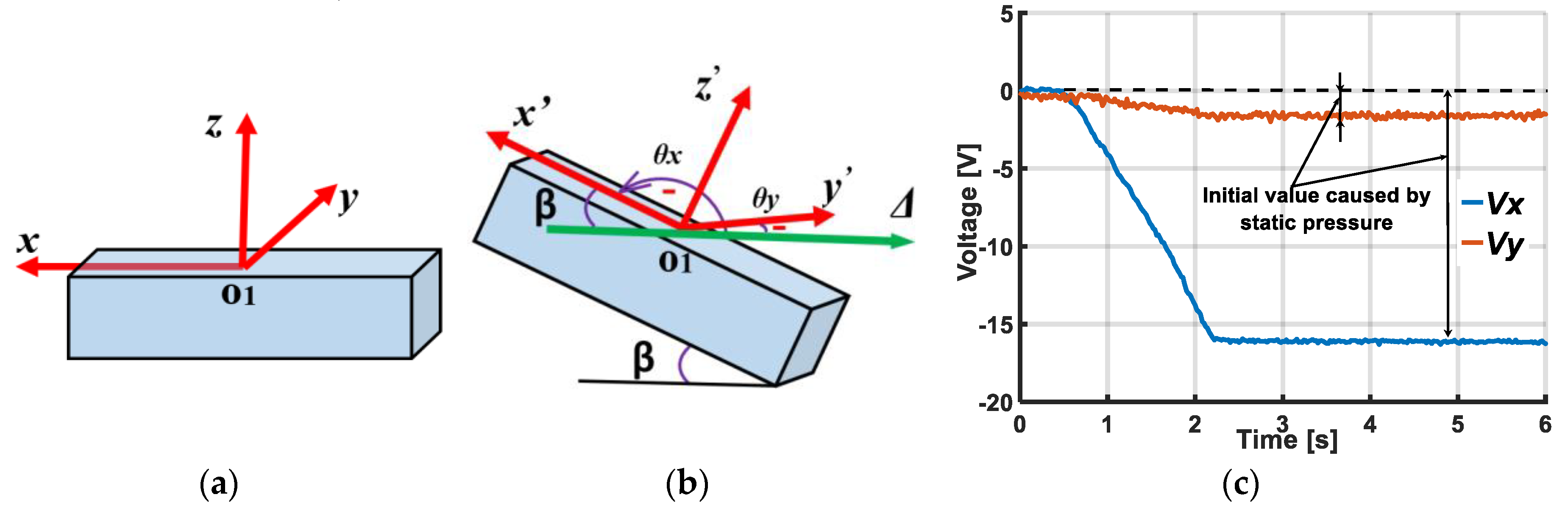
5.1. Output Voltage of Accelerometer Under Static Pressurization Without Sliding Motion
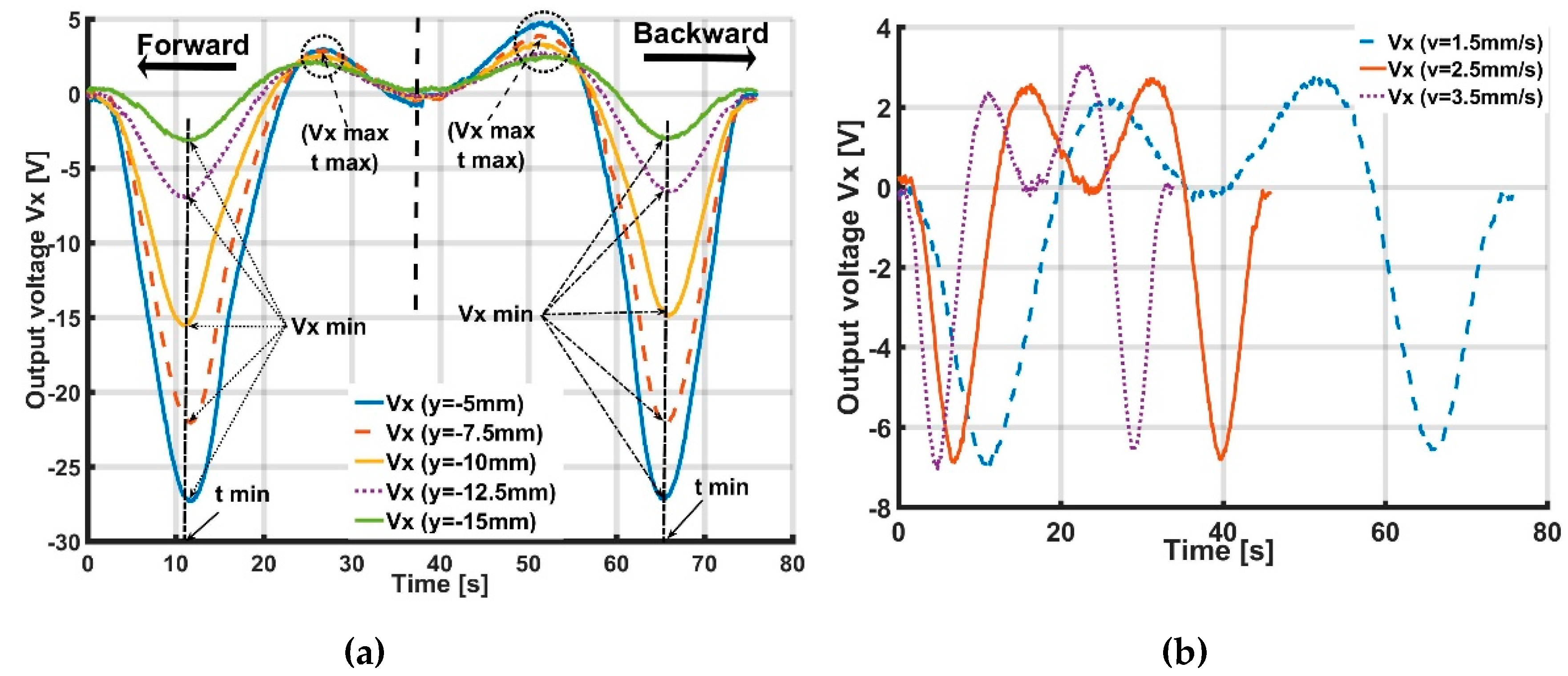
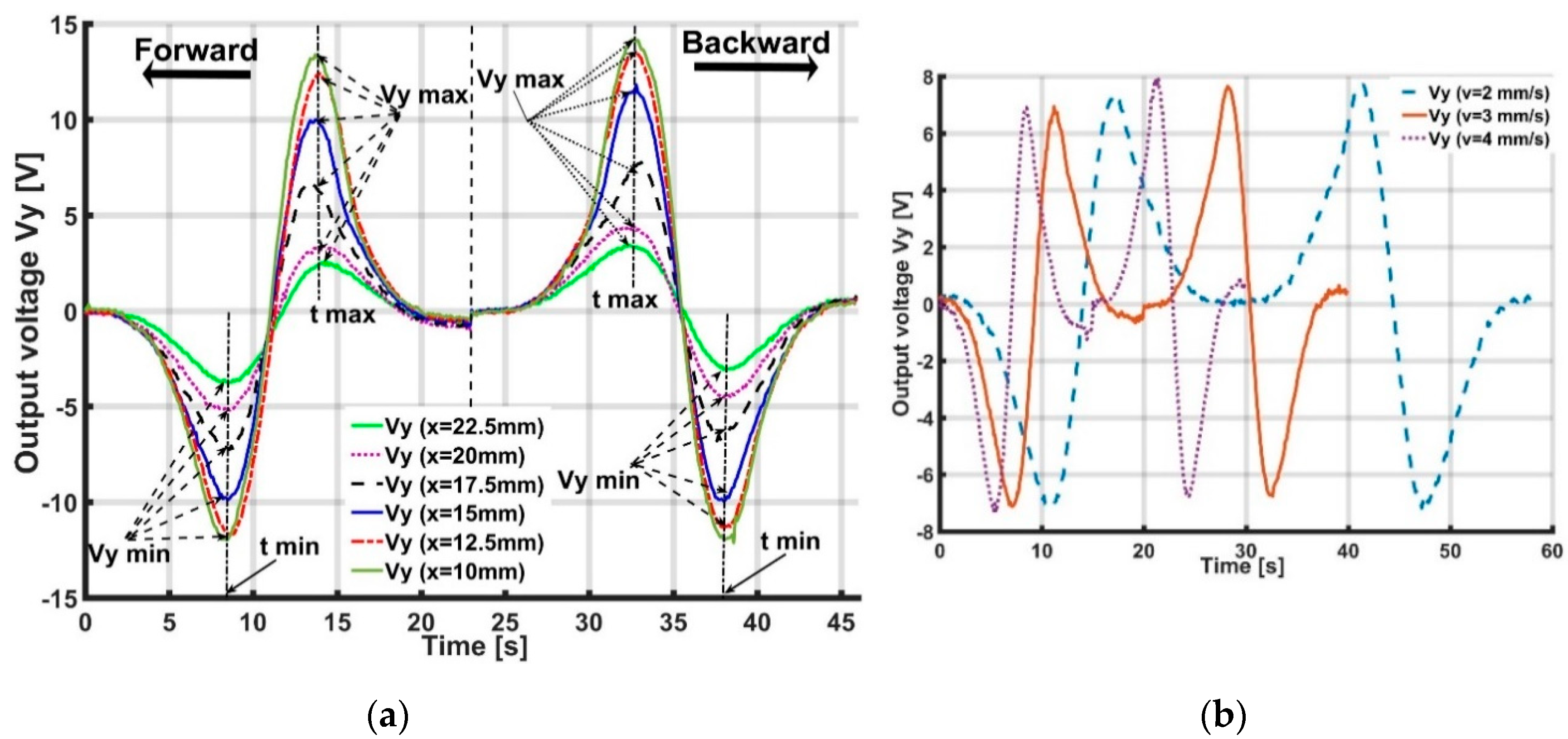
5.2. Output Voltages of Accelerometer Under Sliding Action
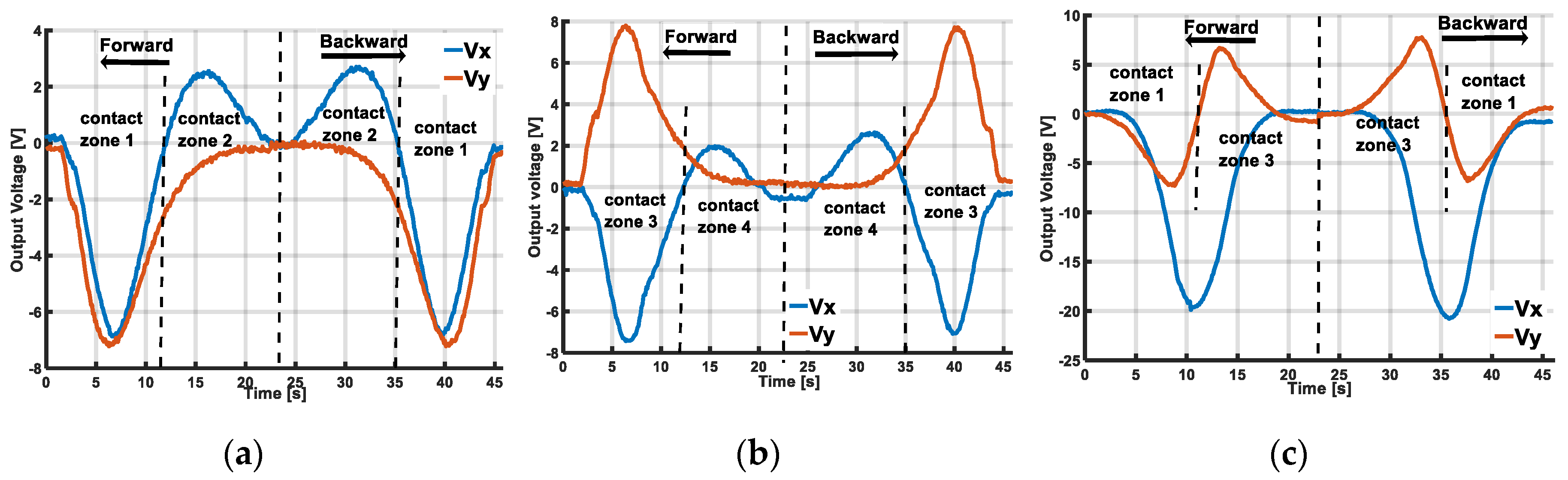
5.2.1. Dynamic Analysis for Detecting Sliding Directions
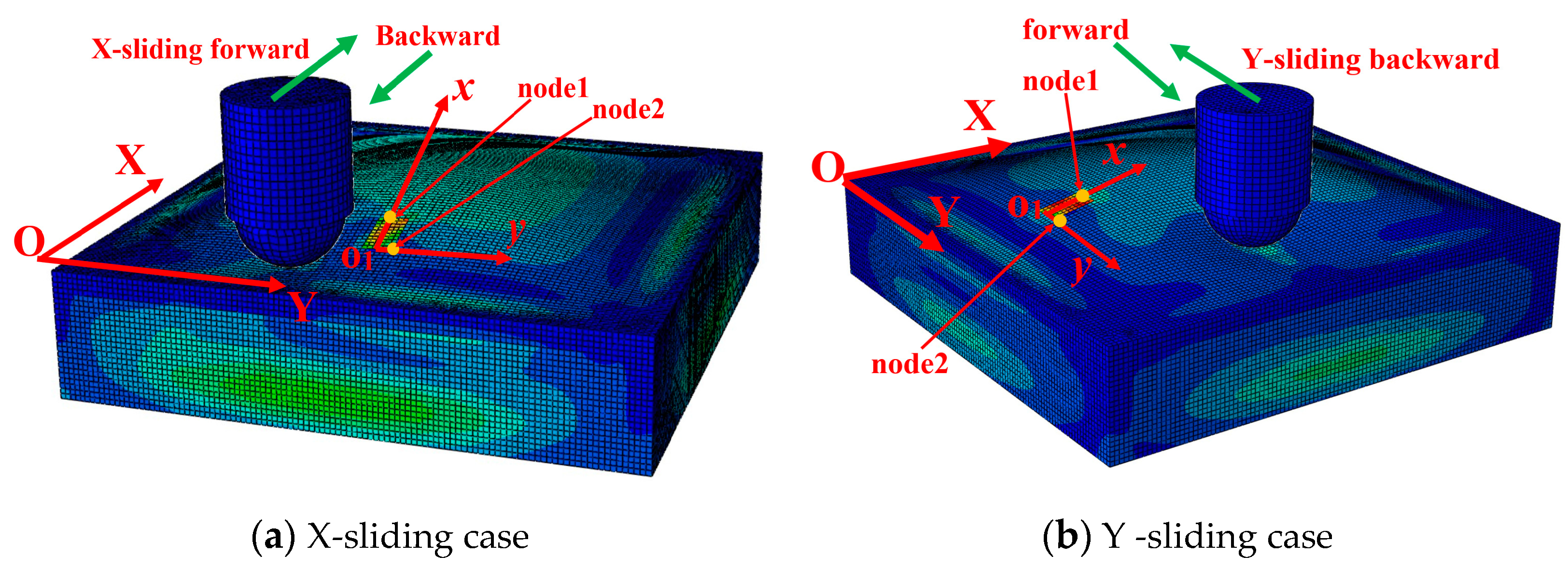
- (1)
- X-sliding case 1: Indenter slides along the X axis with contact position y < 0.
- (2)
- X-sliding case 2: Indenter slides along the X axis with contact position y > 0.
- (3)
- Y-sliding: Indenter slides along the Y axis.
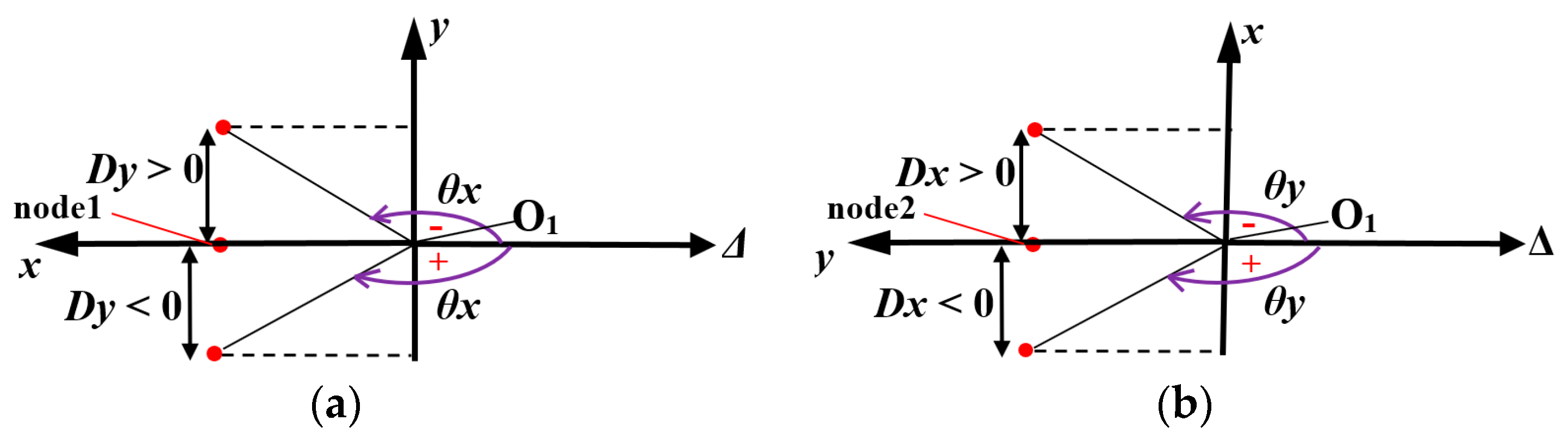
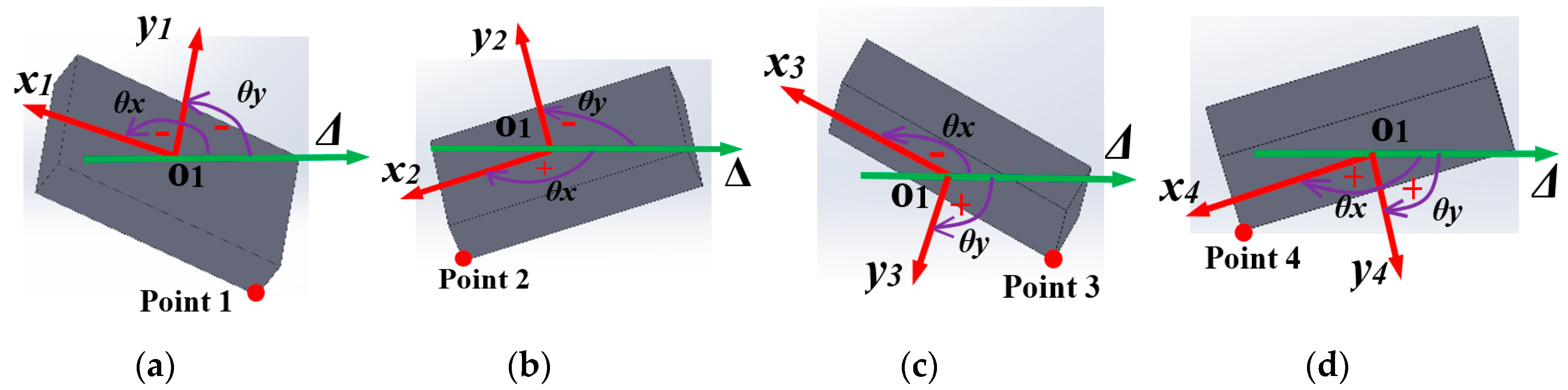
- -
- With contact zone 1: The values of angles between O1x and O1y and horizontal axis are negative, and thus output voltages and are negative: .
- -
- With contact zone 2: .
- -
- With contact zone 3: .
- -
- With contact zone 4: .
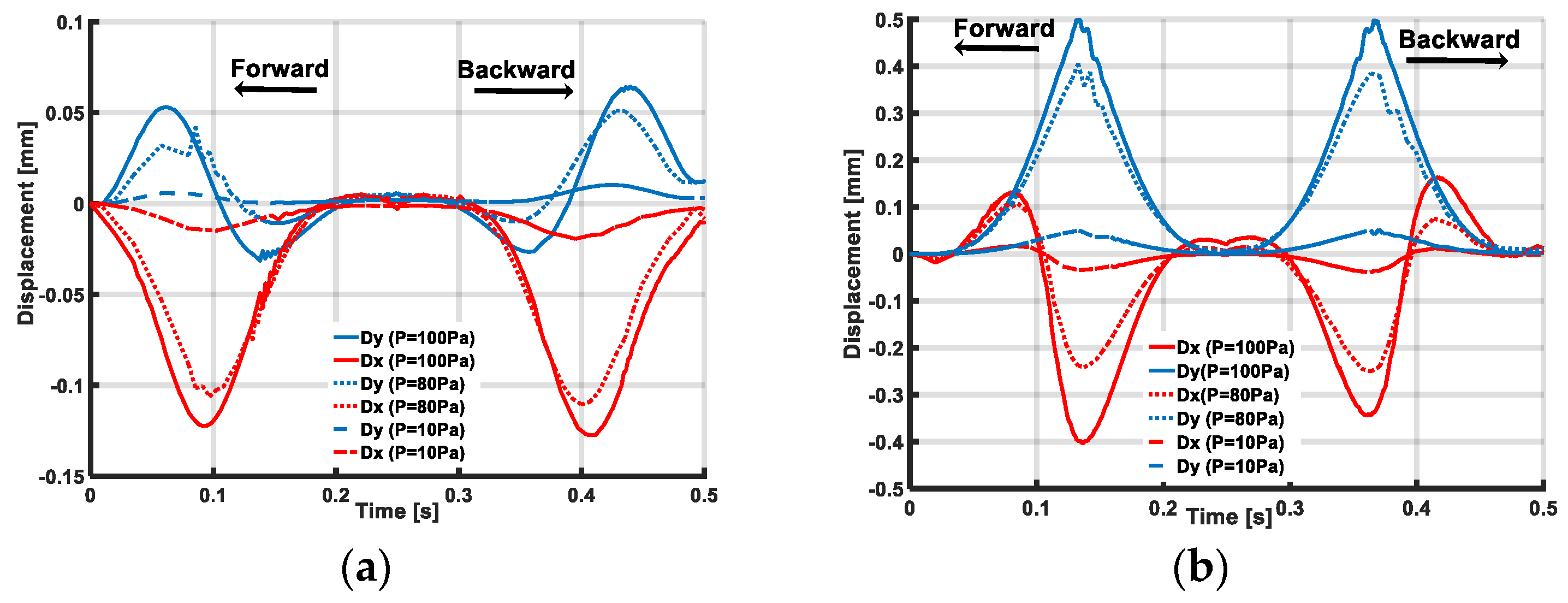
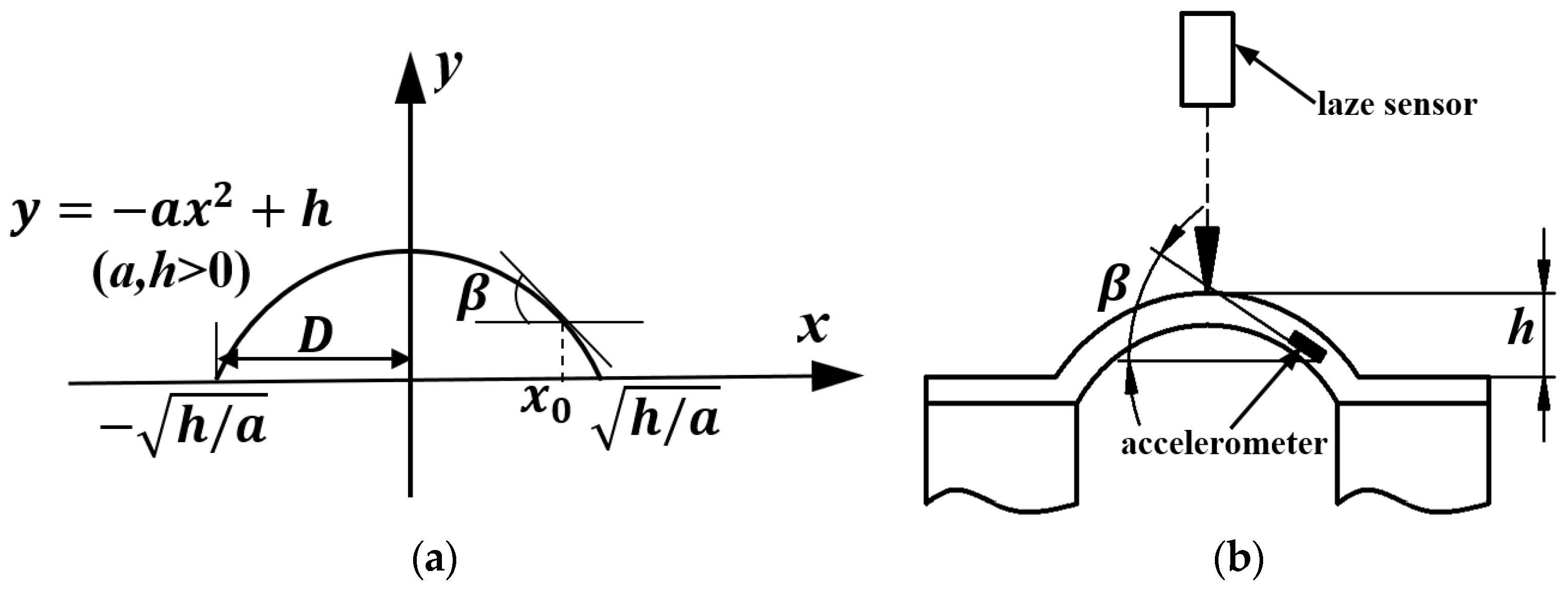
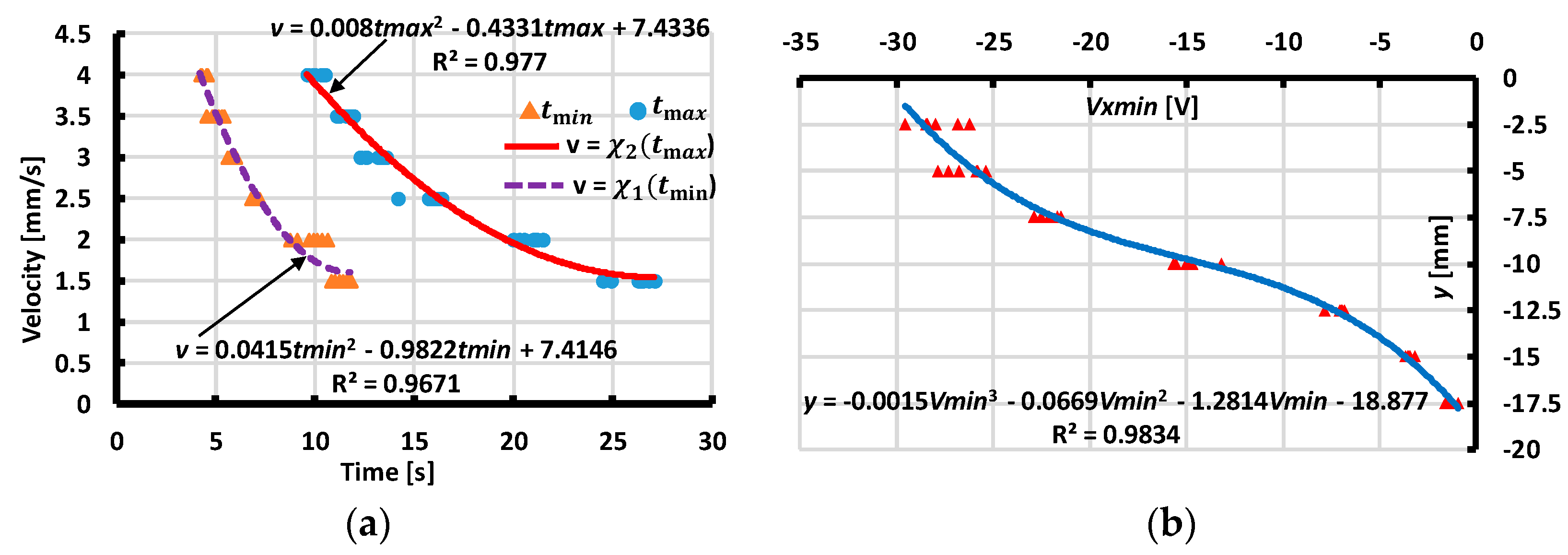
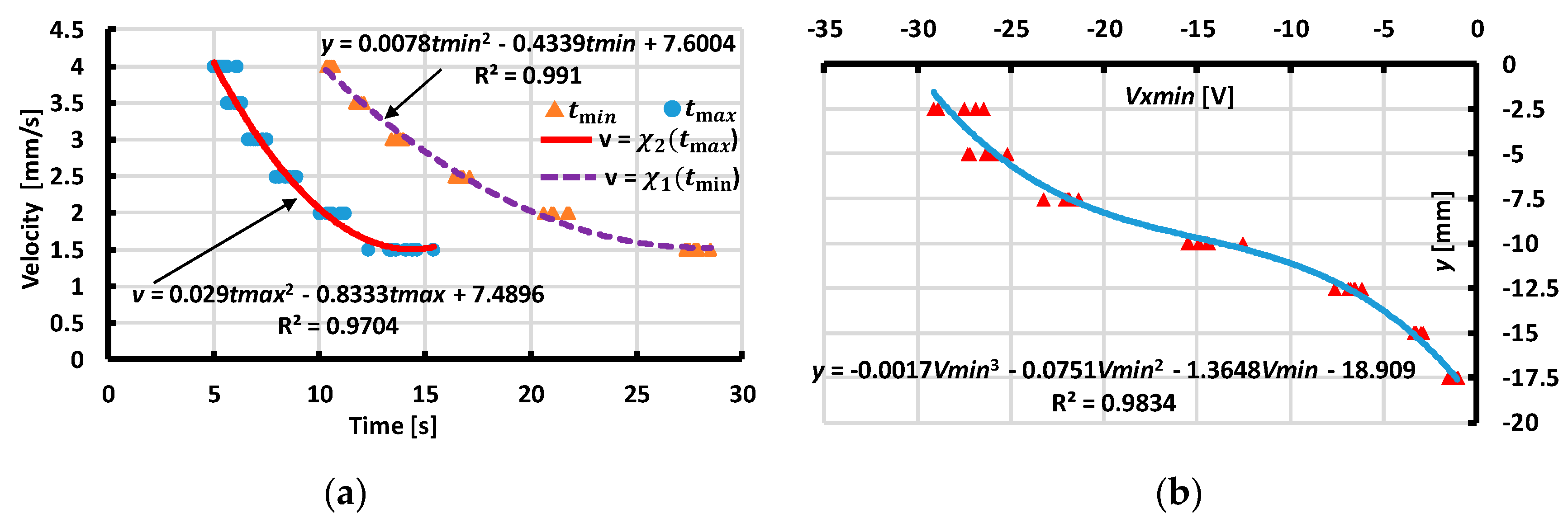
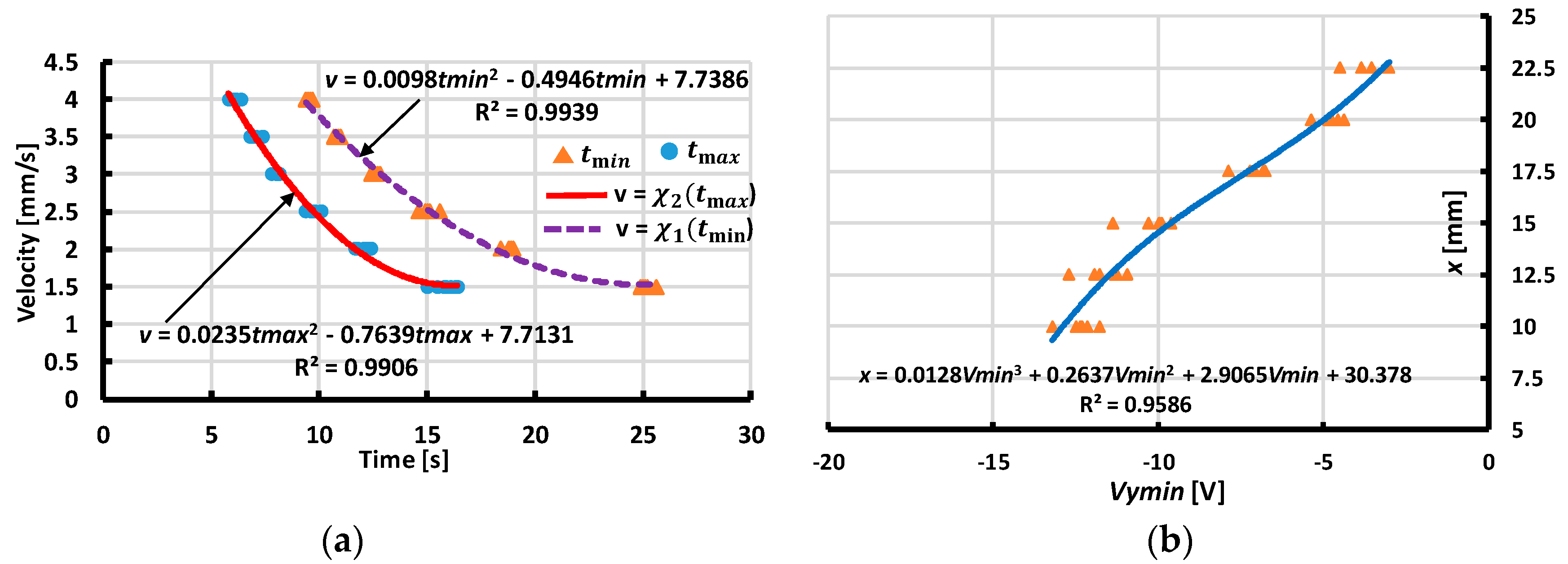
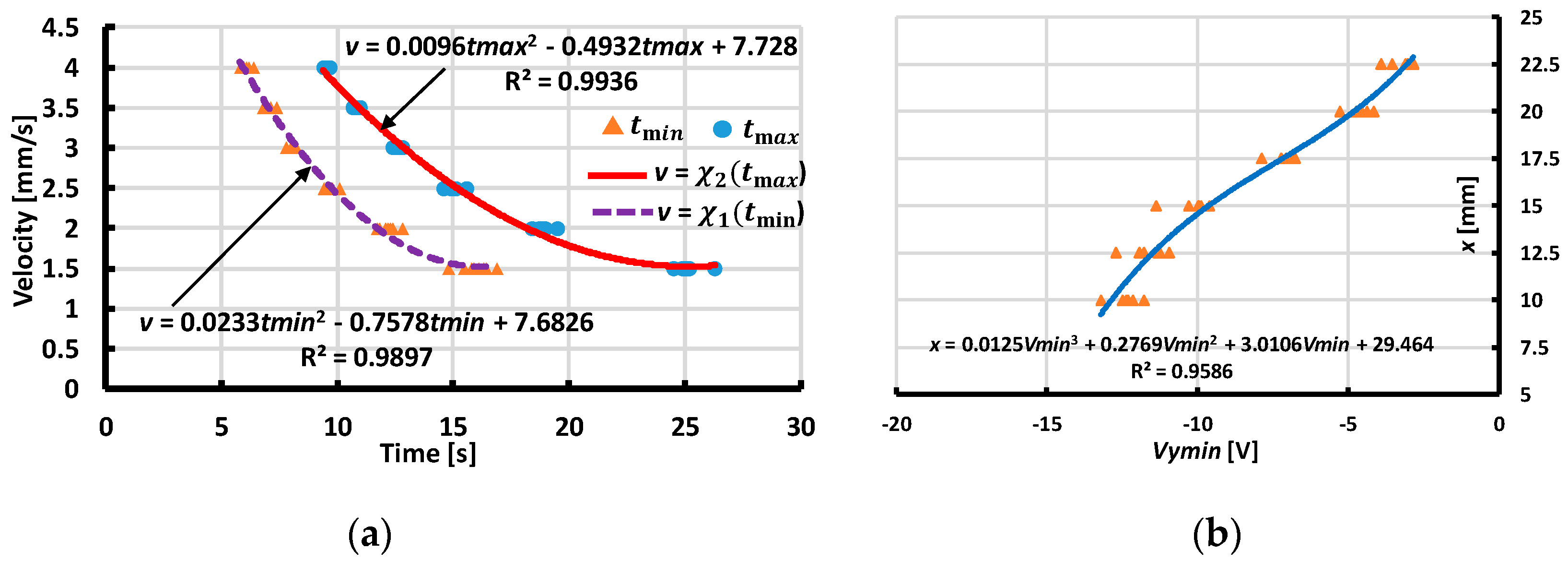
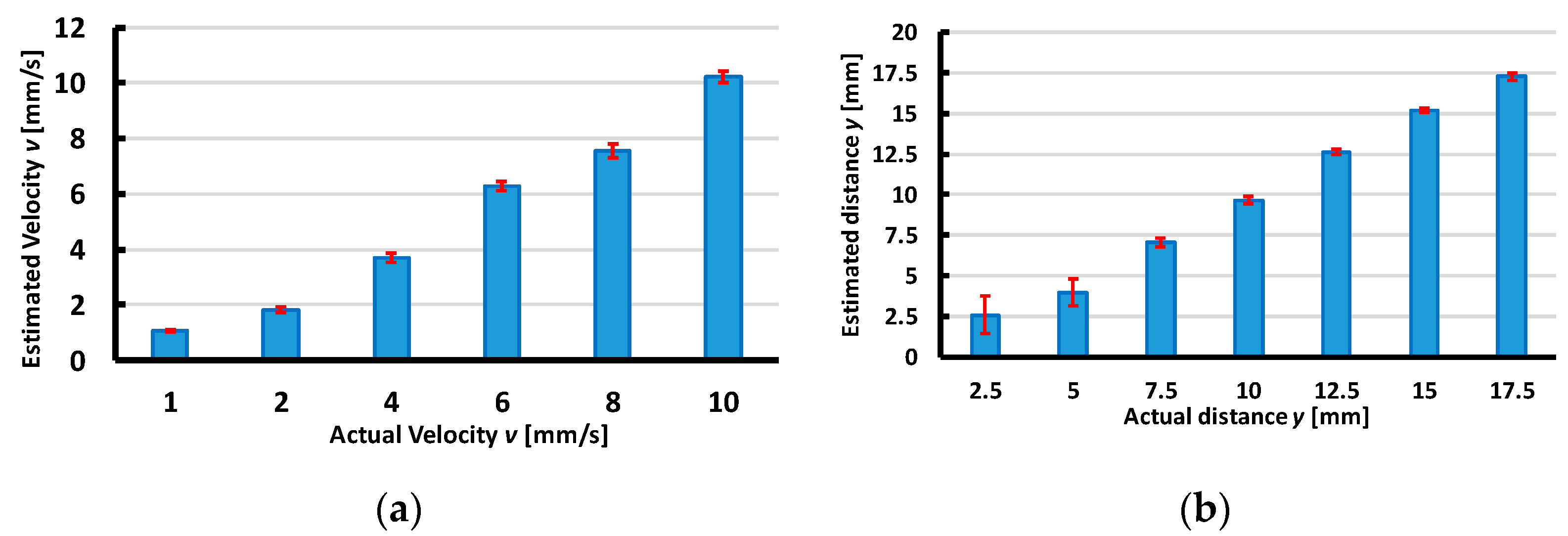
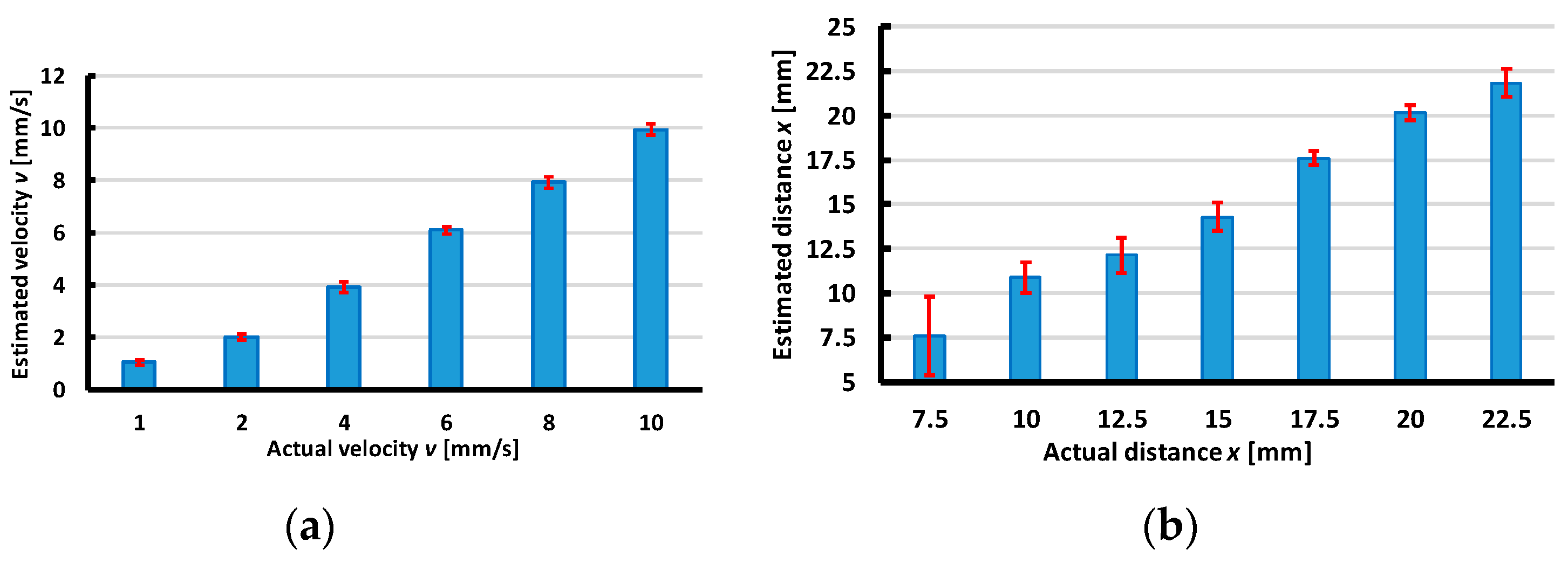
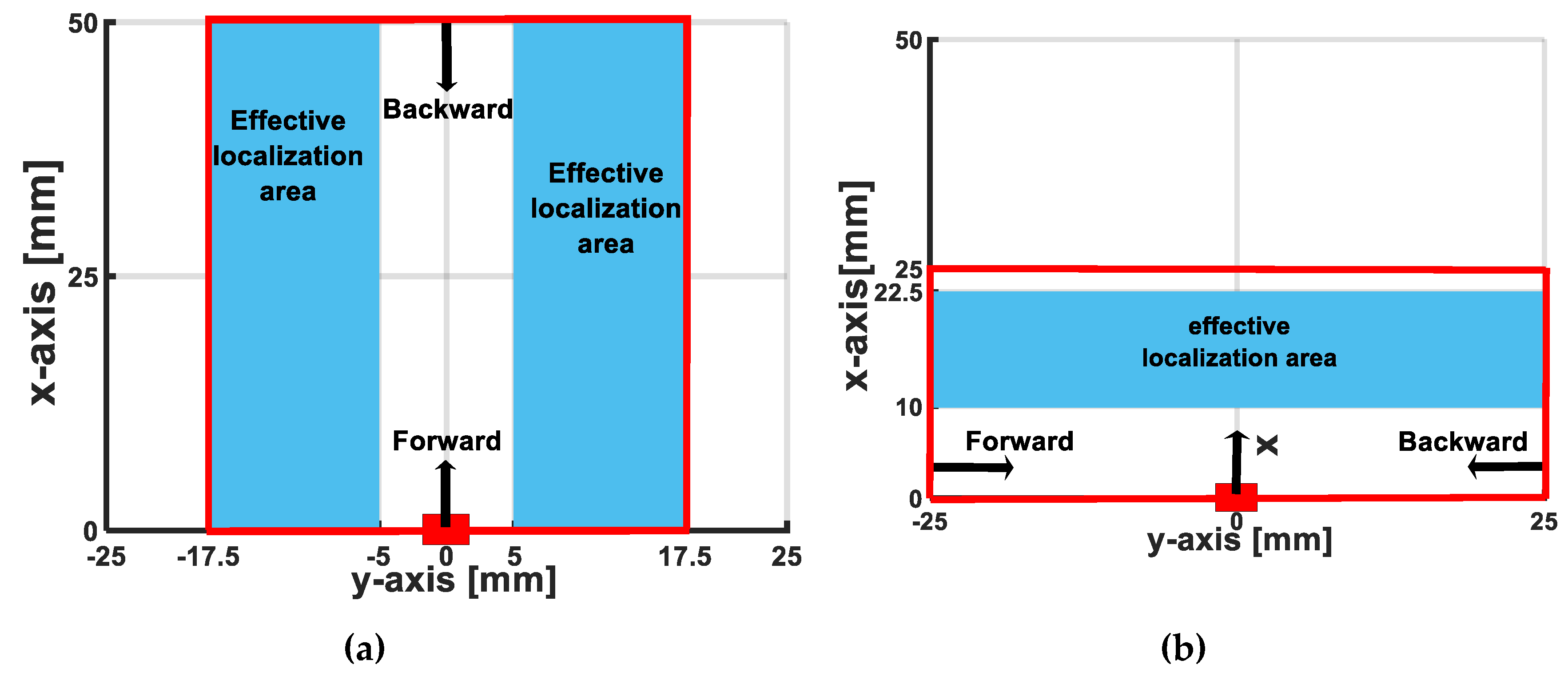
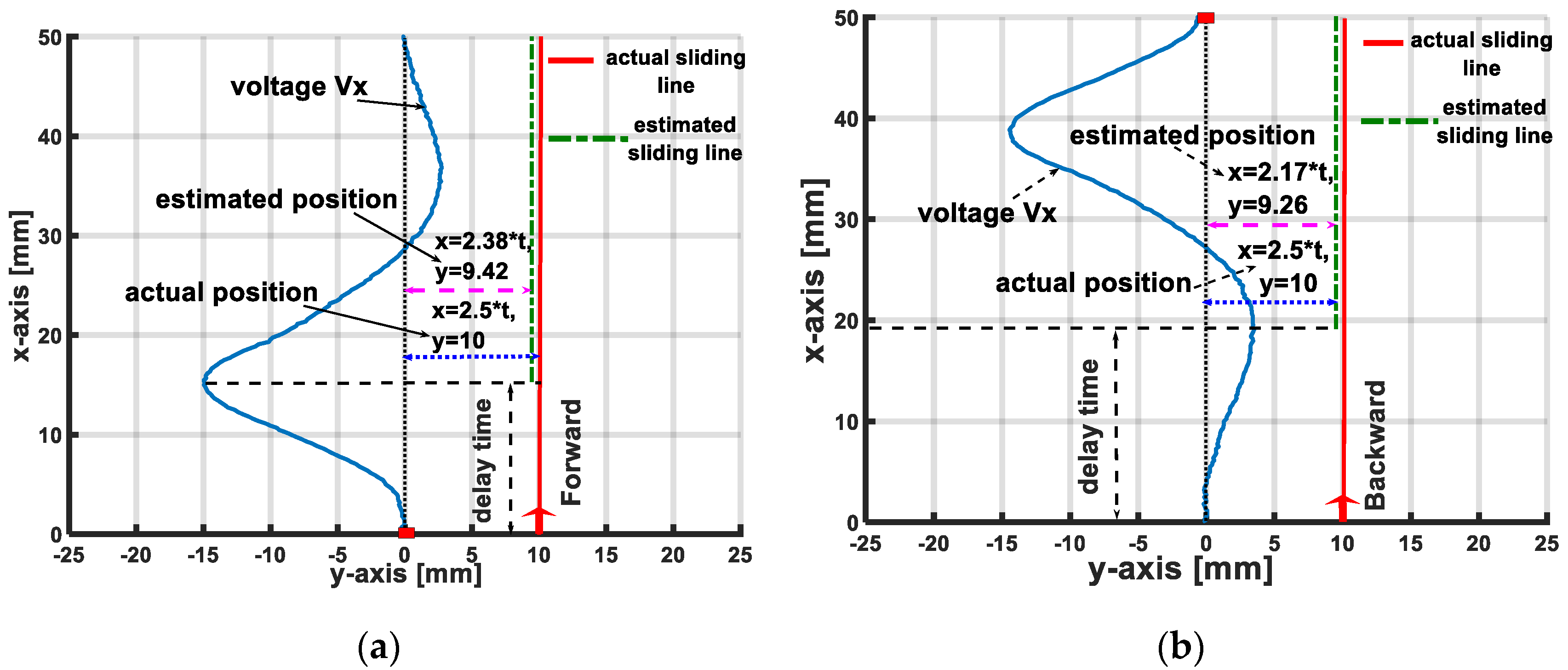
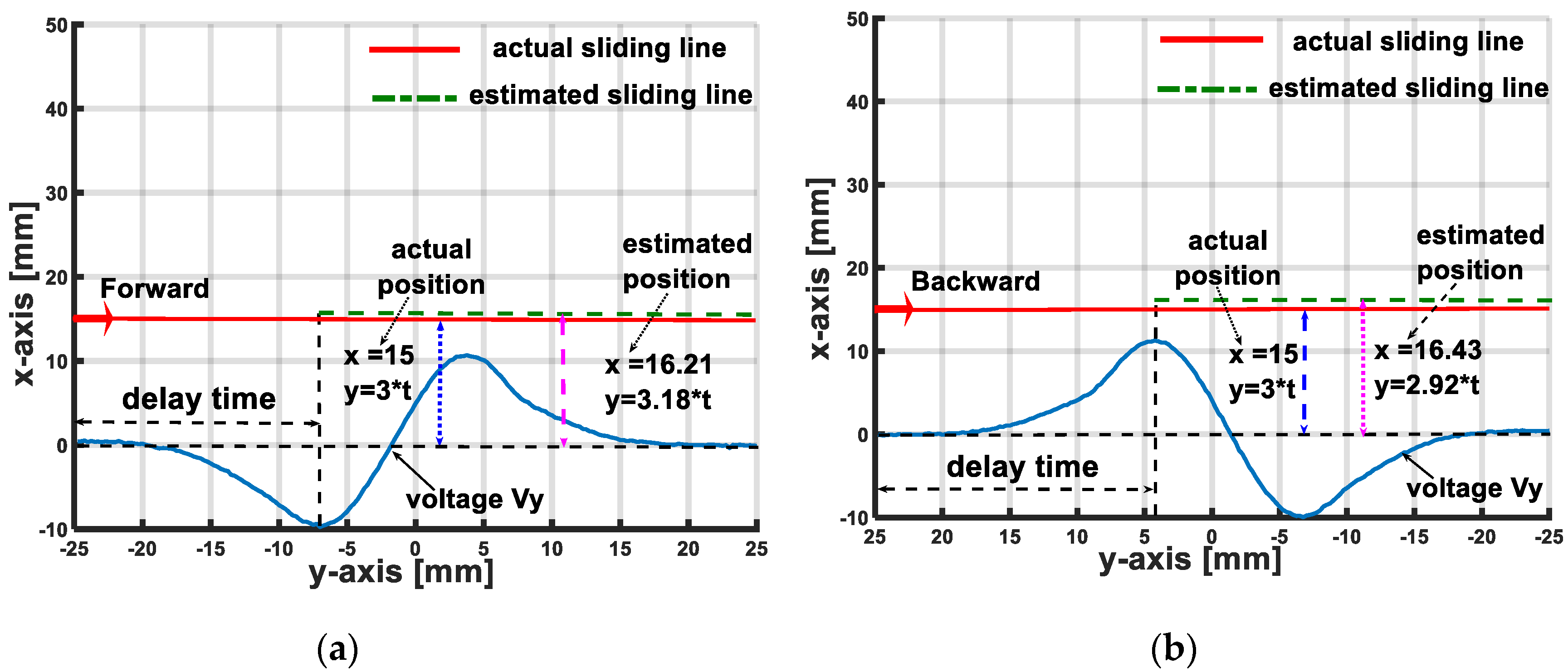
5.2.2. Estimation of Sliding’s Localization.
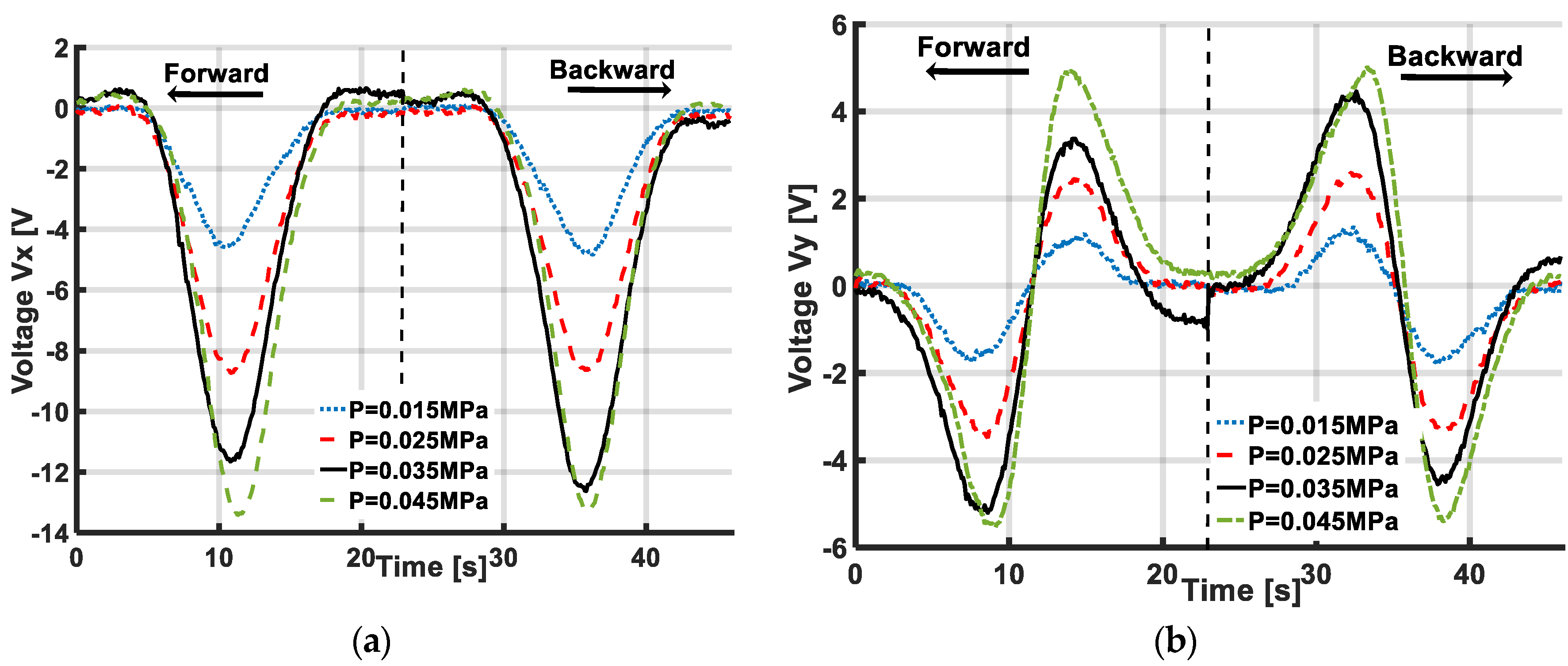
5.3. Role of Pressurization
5.4. Limitations and Applicability of Sensing System
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ravinder, D.; Maurizio, V. Tactile Sensing for Robotic Applications. In Sensors: Focus on Tactile Force and Stress Sensors; Jose, R., Senentxu, M., Eds.; I-Tech: Vienna, Austria, 2008; pp. 289–304. [Google Scholar]
- Eric, K. Principles of Neural Science, 5th ed.; McGrraw-Hill: New York, NY, USA, 2000. [Google Scholar]
- Ravinder, D.; Giorgio, M.; Maurizio, V.; Guilio, S. Tactile sensing—From Humans to Humanoids. IEEE Trans. Rob. 2010, 26, 1–20. [Google Scholar]
- Kwonsik, S.; Minkyung, S.; Eunmin, C.; Hyunchul, P.; Ji, W.C.; Yuljae, C.; Jung, I.S.; Seung, N.C.; Jae, E.J. Artificial Tactile Sensor Structure for Surface Topography Through Sliding. IEEE/ASME Trans. Mechatron. 2018, 23, 2638–2649. [Google Scholar]
- Huang, Y.; Yuan, H.; Kan, W.; Guo, X.; Liu, C.; Liu, P. A flexible three axial capacitive tactile sensor with multilayered dielectric for artificial skin applications. Microsys. Technol. 2007, 23, 1847–1852. [Google Scholar] [CrossRef]
- Dana, D.; Taylor, N.; Rolf, P.; Allison, O. Artificial Tactile Sensing of Position and Slip Speed by Exploiting Geometrical Features. IEEE/ASME Trans. Mechatron. 2015, 20, 263–274. [Google Scholar]
- Javier, A.; Leandro, B. Estimating Object Grasping Sliding via Pressure Array Sensing. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1740–1746. [Google Scholar]
- Paolo, G.; Luigi, P.; Lucia, S.; Maurizio, V.; Rodolfo, Z. Computational Intelligence Techniques for Tactile Sensing Systems. Sensors 2014, 14, 10952–10976. [Google Scholar]
- Pfeifer, R.; Lungarella, M.; Idia, F. Self-organization, embodiment and biologically inspired robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [PubMed]
- Hauser, H.; Rudolf, M.; Kohei, N. Morphological computation-The physical body as a computational resource. Self-published. 2014, 20, 226–244. [Google Scholar]
- Muller, V.C.; Hoffman, M. What is morphological computation? On how the body contributes to cognition and control. Artif. Life 2017, 23, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Ahanat, K.; Juan, A.C.R.; Veronique, P. Tactile sensing in dexterous robot hands-Review. Rob. Auton. Syst. 2015, 74, 195–220. [Google Scholar]
- Trinh, H.X.; Shibuya, K. Tactile sensing system with wrinkle’s morphological change: Modeling. In Proceedings of the IEEE International Conference on Soft Robotics, Livorno, Italy, 24–28 April 2018; pp. 362–368. [Google Scholar]
- Chathuranga, D.S.; Wang, Z.; Noh, Y.; Thrishantha, N.; Shinichi, H. Magnetic and mechanical modelling of a soft three-axis force sensor. IEEE Sens. J. 2016, 16, 5298–5307. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.; Tee, B.C.; Stoltenberg, R.M.; Chen, C.V.H.; Barman, S.; Muir, B.V.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef] [PubMed]
- Julius, E.B.; Van, A.H.; Hongbin, L. Morphological computation in haptic sensation and interaction: from nature to robotics. Adv. Rob. 2018, 32, 340–362. [Google Scholar]
- Van, A.H.; Yamashita, H.; Wang, Z.; Shinichi, H.; Koji, S. Wrin’Tac: Tactile sensing system with wrinkle’s morphological change. IEEE Trans. Inf. 2017, 13, 2496–2506. [Google Scholar]
- Trinh, H.X.; Ho, V.A.; Shibuya, K. Computational model for tactile sensing system with wrinkle’s morphological change. Adv. Rob. 2018, 32, 1135–1150. [Google Scholar]
- Shunsuka, S.; Shogo, O.; Yoichiro, M.; Yoji, Y. Wearable finger pad deformation sensor for tactile textures in frequency domain by using accelerometer on finger side. ROBOMECH J. 2017, 4, 1–11. [Google Scholar]
- Carlos, B.; Martin, M.; Pablo, B. Tactile sensing with accelerometers in prehensile grippers for robots. Mechatronics 2016, 33, 1–12. [Google Scholar]
- Chathuranga, K.V.D.S.; Hirai, S. A bio-mimetic fingertip that detect force and vibration modalities and its application to surface identification. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Guangzhou, China, 11–14 December 2012; pp. 575–581. [Google Scholar]
- Vallbo, A.B.; Johansson, R.S. Properties of cutaneous mechanoreceptors in the human hand related to touch sensation. Hum. Neurobiol. 1984, 3, 3–14. [Google Scholar]
- Jackson, K.; Brooks, D.R. Do crocodiles co-opt their sense of touch to taste? a possible new type of vertebrate sensory organ. Amphib. Reptil. 2009, 28, 277–285. [Google Scholar] [CrossRef]
- Leitch, D.B.; Catania, K.C. Structure, innervation and response properties of integumentary sensory organs in crocodilians. J. Exp. Biol. 2012, 215, 4217–4230. [Google Scholar] [CrossRef] [PubMed]
- Fritz, V.; Paul, A.S. The role of behavior in the evolution of spiders, silks, and webs. Annu. Rev. Ecol. Evol. Syst. 2007, 38, 819–846. [Google Scholar]
- Discovery. Spiders ‘Listen’ to Web Tones to Detect Prey. Available online: http://blogs.discovermagazine.com/d-brief/2014/06/04/spiders-listen-prey/ (accessed on 25 September 2018).
- Shin-Estu Sillione. Rubber compounds. Available online: https://www.shinetsusilicone-global.com/products/type/rubb_comp/index.shtml (accessed on 27 October 2018).
- Smooth-On, Inc. Ecoflex™ 00-10. Available online: https://www.smooth-on.com/products/ecoflex-00-10/ (accessed on 25 September 2018).
- NXP. ±1.5g, ±6g Three Axis Low-g Micromachined Accelerometer. Available online: https://www.nxp.com/files-static/sensors/doc/data_sheet/MMA7361L.pdf (accessed on 16 October 2018).


























© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trinh, H.X.; Iwamoto, Y.; Ho, V.A.; Shibuya, K. Localization of Sliding Movements Using Soft Tactile Sensing Systems with Three-axis Accelerometers. Sensors 2019, 19, 2036. https://doi.org/10.3390/s19092036
Trinh HX, Iwamoto Y, Ho VA, Shibuya K. Localization of Sliding Movements Using Soft Tactile Sensing Systems with Three-axis Accelerometers. Sensors. 2019; 19(9):2036. https://doi.org/10.3390/s19092036
Chicago/Turabian StyleTrinh, Hiep Xuan, Yuki Iwamoto, Van Anh Ho, and Koji Shibuya. 2019. "Localization of Sliding Movements Using Soft Tactile Sensing Systems with Three-axis Accelerometers" Sensors 19, no. 9: 2036. https://doi.org/10.3390/s19092036
APA StyleTrinh, H. X., Iwamoto, Y., Ho, V. A., & Shibuya, K. (2019). Localization of Sliding Movements Using Soft Tactile Sensing Systems with Three-axis Accelerometers. Sensors, 19(9), 2036. https://doi.org/10.3390/s19092036