Physically Consistent Whole-Body Kinematics Assessment Based on an RGB-D Sensor. Application to Simple Rehabilitation Exercises

 ,
,  ,
,
Abstract
:1. Introduction
2. Background
2.1. Related Work
2.2. Contribution
- A new CEKF is proposed to obtain physically consistent joint angles in real-time and at low computational cost. The constraints impose fixed segment lengths which do not require a subject- specific calibration and joint angle physiological limits;
- A pragmatic method is proposed to optimize the measurement and process covariance matrices of the CEKF based on the SS data, depending only on the investigated task and not on the subject. Thus, as for the segment lengths, all model and method calibrations can be performed a priori without involving the subjects under study;
- An experimental validation based on a joint angle accuracy analysis (i.e., CEKF vs. MKO) of the whole-body is presented.
3. Materials and Methods
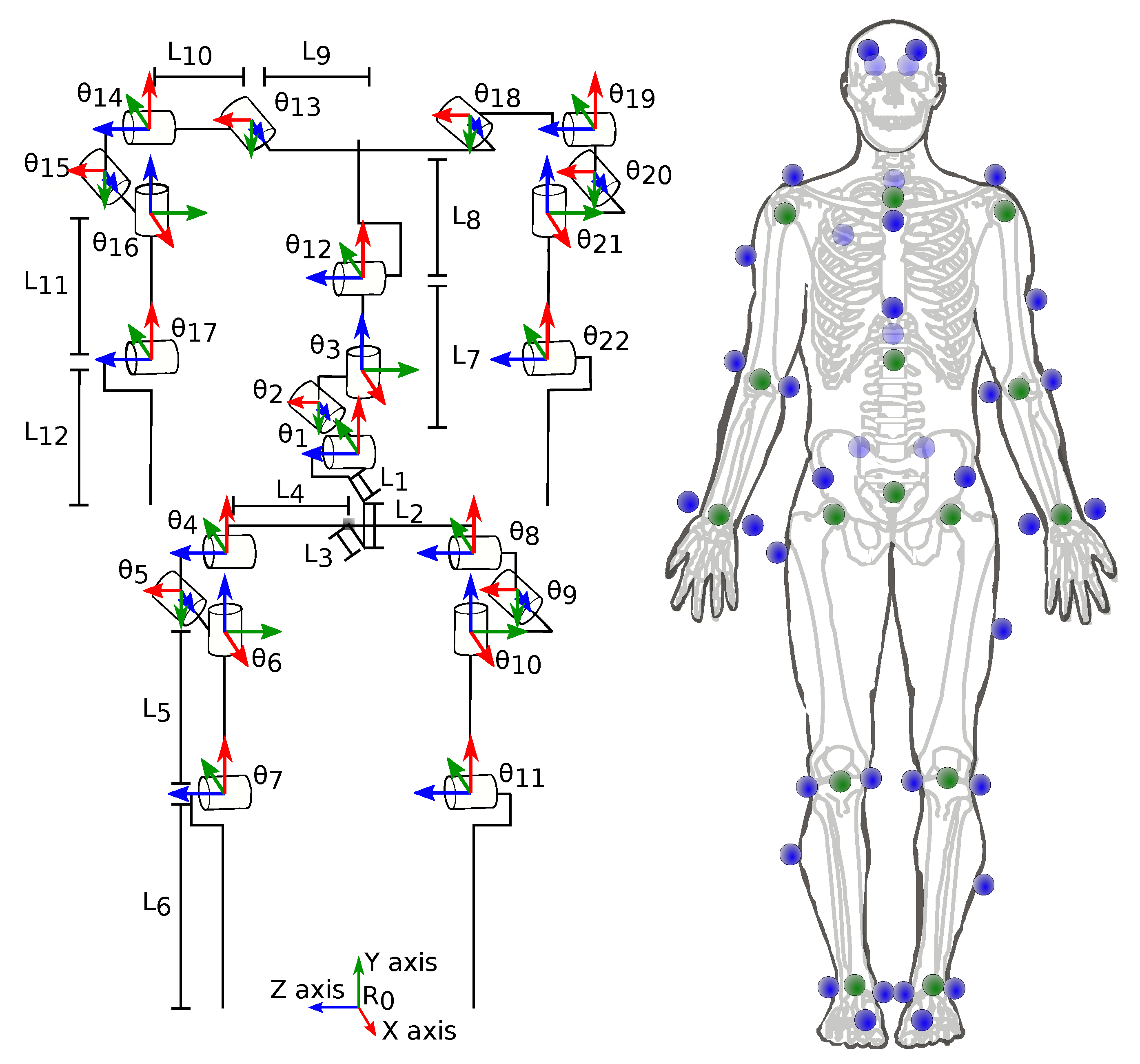
3.1. Mechanical Model
3.2. Constrained Extended Kalman Filter
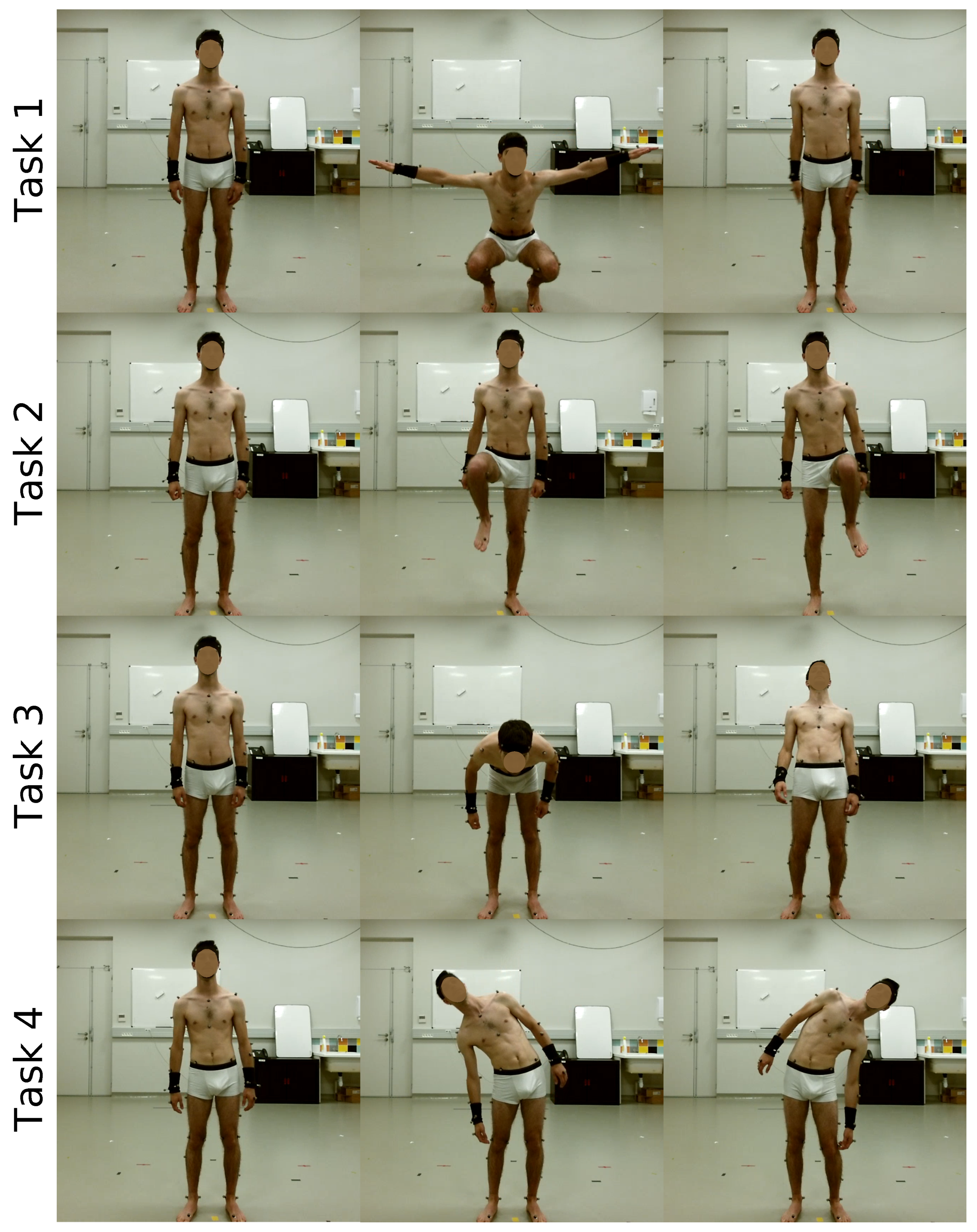
3.3. Participants and Procedures
3.4. Cekf Parameter Adjustment
3.4.1. Data-Driven Tuning of Matrix
3.4.2. Optimal Tuning of Matrix
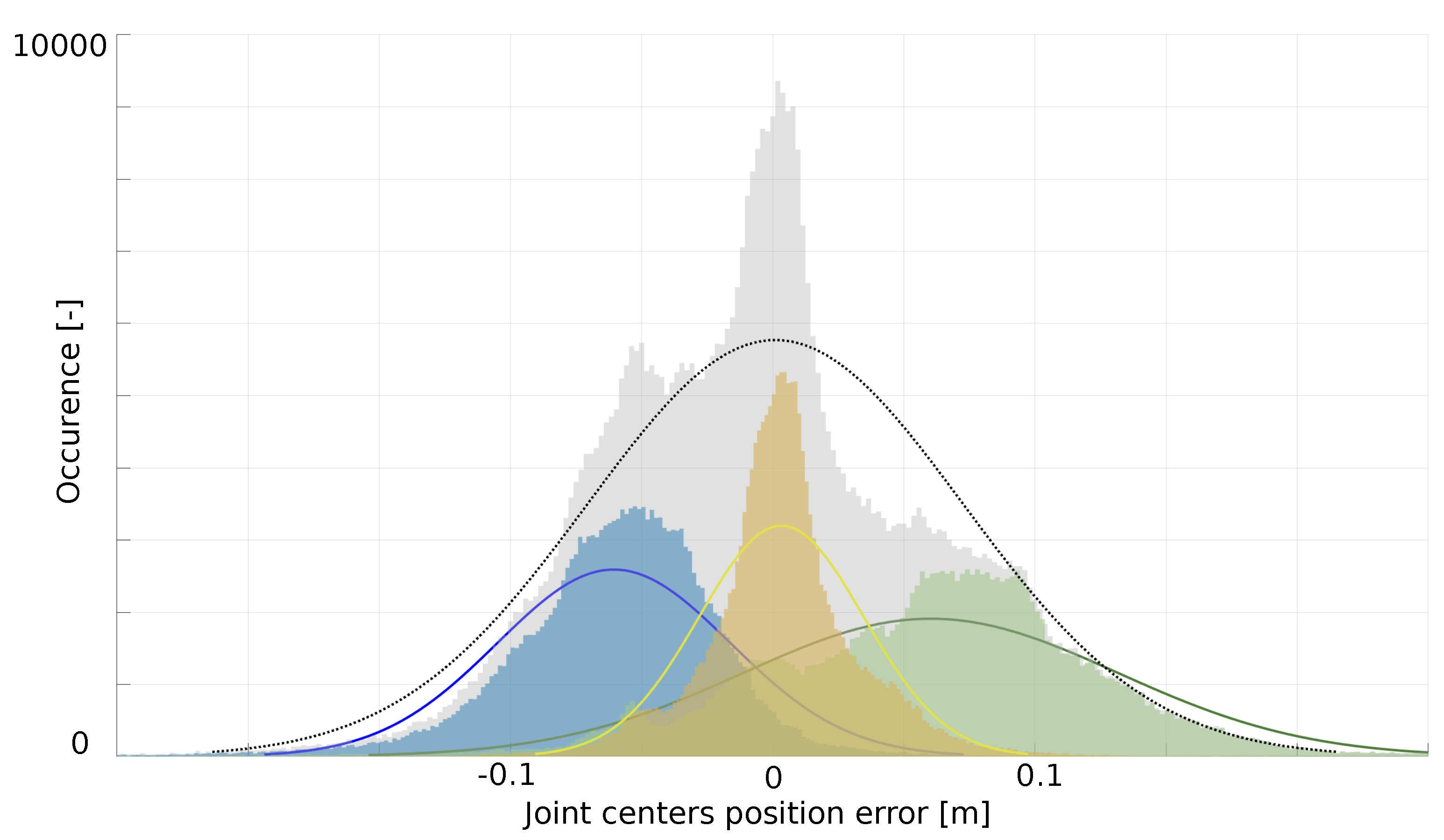
3.5. Performance Analysis
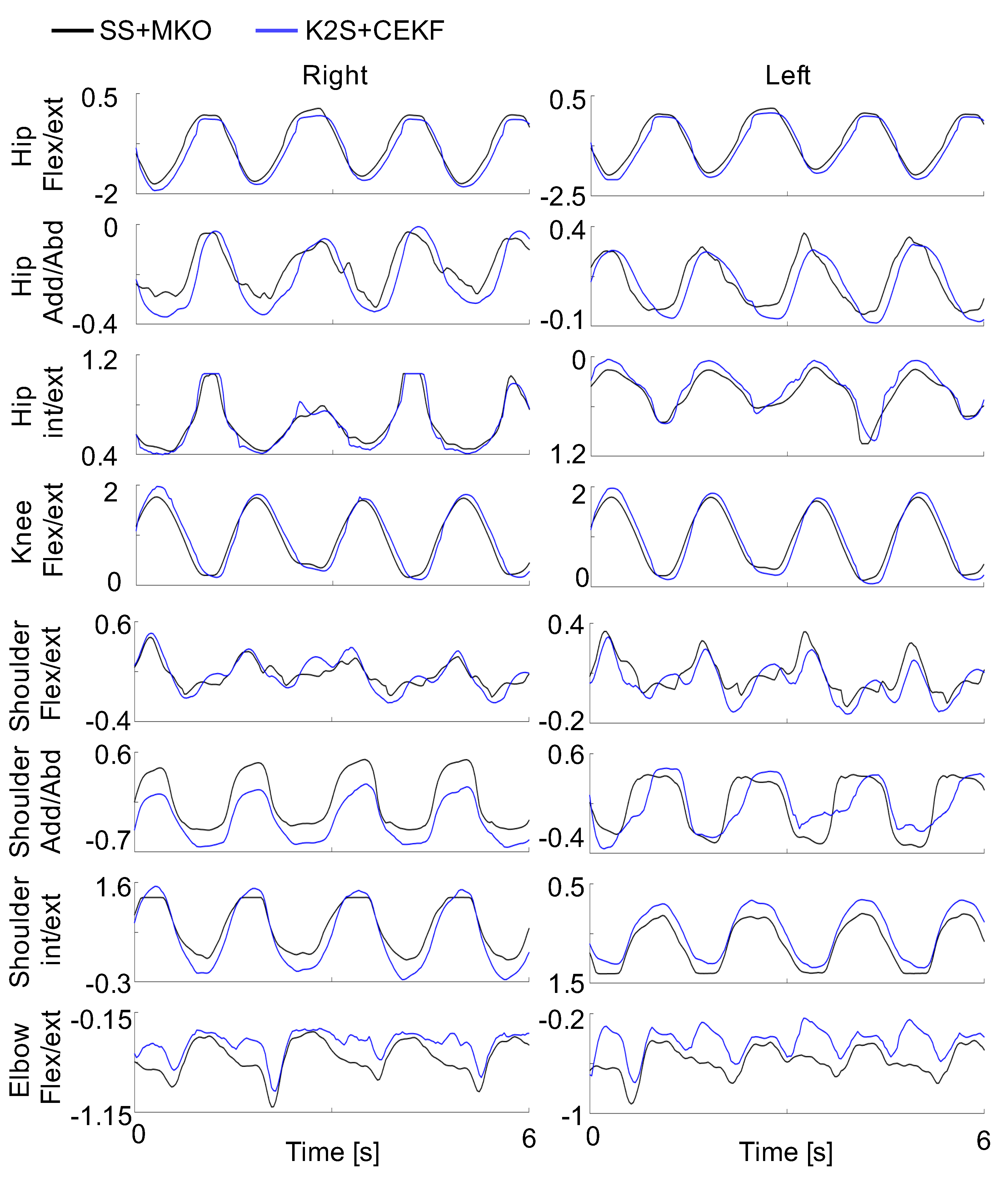
4. Results and Discussion
Matrix Estimation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Brunnekreef, J.J.; van Uden, C.J.; van Moorsel, S.; Kooloos, J.G. Reliability of videotaped observational gait analysis in patients with orthopedic impairments. BMC Musculoskelet. Disord. 2005, 6, 17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lavernia, C.; D’Apuzzo, M.; Rossi, M.D.; Lee, D. Accuracy of Knee Range of Motion Assessment after Total Knee Arthroplasty. J. Arthroplast. 2008, 23, 85–91. [Google Scholar] [CrossRef] [PubMed]
- Begon, M.; Andersen, M.S.; Dumas, R. Multibody Kinematics Optimization for the Estimation of Upper and Lower Limb Human Joint Kinematics: A Systematized Methodological Review. J. Biomech. Eng. 2018, 140, 030801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bonnechère, B.; Jansen, B.; Omelina, L.; Van Sint Jan, S. The use of commercial video games in rehabilitation: A systematic review. Int. J. Rehabil. Res. 2016, 36, 277–290. [Google Scholar] [CrossRef] [PubMed]
- López-Nava, I.H.; Muñoz-Meléndez, A. Wearable Inertial Sensors for Human Motion Analysis: A Review. IEEE Sens. J. 2016, 16, 7821–7834. [Google Scholar] [CrossRef]
- Moeslund, T.B.; Granum, E. A Survey of Computer Vision-Based Human Motion Capture. Comput. Vis. Image Underst. 2001, 81, 231–268. [Google Scholar] [CrossRef]
- Chen, L.; Wei, H.; Ferryman, J. A survey of human motion analysis using depth imagery. Pattern Recognit. Lett. 2013, 34, 1995–2006. [Google Scholar] [CrossRef]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.E.; Sheikh, Y. OpenPose: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields. arXiv 2018, arXiv:1812.08008. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Sedlar, J.; Carpentier, J.; Laptev, I.; Mansard, N.; Sivic, J. Estimating 3D Motion and Forces of Person-Object Interactions From Monocular Video. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 8640–8649. [Google Scholar]
- Da Gama, A.; Fallavollita, P.; Teichrieb, V.; Navab, N. Motor Rehabilitation Using Kinect: A Systematic Review. Games Health J. 2015, 4, 123–135. [Google Scholar] [CrossRef]
- Wang, Q.; Kurillo, G.; Ofli, F.; Bajcsy, R. Evaluation of Pose Tracking Accuracy in the First and Second Generations of Microsoft Kinect. In Proceedings of the International Conference on Healthcare Informatics, Dallas, TX, USA, 21–23 October 2015; pp. 380–389. [Google Scholar] [CrossRef] [Green Version]
- Naeemabadi, M.; Dinesen, B.; Andersen, O.K.; Najafi, S.; Hansen, J. Evaluating Accuracy and Usability of Microsoft Kinect Sensors and Wearable Sensor for Tele Knee Rehabilitation after Knee Operation. Available online: https://www.scitepress.org/papers/2018/65782/65782.pdf (accessed on 8 May 2020).
- Wochatz, M.; Tilgner, N.; Mueller, S.; Rabe, S.; Eichler, S.; John, M.; Völler, H.; Mayer, F. Reliability and validity of the Kinect V2 for the assessment of lower extremity rehabilitation exercises. Gait Posture 2019, 70, 330–335. [Google Scholar] [CrossRef]
- Galna, B.; Barry, G.; Jackson, D.; Mhiripiri, D.; Olivier, P.; Rochester, L. Accuracy of the Microsoft Kinect sensor for measuring movement in people with Parkinson’s disease. Gait Posture 2014, 39, 1062–1068. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Otte, K.; Kayser, B.; Mansow-Model, S.; Verrel, J.; Paul, F.; Brandt, A.U.; Schmitz-Hübsch, T. Accuracy and Reliability of the Kinect Version 2 for Clinical Measurement of Motor Function. PLoS ONE 2016, 11, e0166532. [Google Scholar] [CrossRef] [PubMed]
- Bonnechère, B.; Sholukha, V.; Omelina, L.; Van Sint, S.; Jansen, B. 3D Analysis of Upper Limbs Motion during Rehabilitation Exercises Using the KinectTM Sensor: Development, Laboratory Validation and Clinical Application. Sensors 2018, 18, 2216. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kuster, R.P.; Heinlein, B.; Bauer, C.M.; Graf, E.S. Accuracy of KinectOne to quantify kinematics of the upper body. Gait Posture 2016, 47, 80–85. [Google Scholar] [CrossRef]
- Han, F.; Reily, B.; Hoff, W.; Zhang, H. Space-time representation of people based on 3D skeletal data: A review. Comput. Vis. Image Underst. 2017, 158, 85–105. [Google Scholar] [CrossRef] [Green Version]
- Plantard, P.; Shum, H.P.H.; Multon, F. Filtered pose graph for efficient kinect pose reconstruction. Multimed. Tools Appl. 2017, 76, 4291–4312. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Baek, S.; Bae, B.C. Motion Capture of the Human Body Using Multiple Depth Sensors. ETRI J. 2017, 39, 181–190. [Google Scholar] [CrossRef]
- Skals, S.; Rasmussen, K.P.; Bendtsen, K.M.; Yang, J.; Andersen, M.S. A musculoskeletal model driven by dual Microsoft Kinect Sensor data. Multibody Syst. Dyn. 2017, 41, 297–316. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Jafari, R.; Kehtarnavaz, N. A survey of depth and inertial sensor fusion for human action recognition. Multimed. Tools Appl. 2017, 76, 4405–4425. [Google Scholar] [CrossRef]
- Feng, S.; Murray-Smith, R. Fusing Kinect sensor and inertial sensors with multi-rate Kalman filter. In Proceedings of the IET Conference on Data Fusion and Target Tracking: Algorithms and Applications (DF TT 2014), Liverpool, UK, 30 April 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Du, Y.C.; Shih, C.B.; Fan, S.C.; Lin, H.T.; Chen, P.J. An IMU-compensated skeletal tracking system using Kinect for the upper limb. Microsyst. Technol. 2018, 24, 4317–4327. [Google Scholar] [CrossRef]
- Tripathy, S.R.; Chakravarty, K.; Sinha, A. Constrained Particle Filter for Improving Kinect Based Measurements. In Proceedings of the 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 306–310. [Google Scholar] [CrossRef]
- Shu, J.; Hamano, F.; Angus, J. Application of extended Kalman filter for improving the accuracy and smoothness of Kinect skeleton-joint estimates. J. Eng. Math. 2014, 88, 161–175. [Google Scholar] [CrossRef]
- Khalil, W.; Creusot, D. SYMORO+: A system for the symbolic modelling of robots. Robotica 1997, 15, 153–161. [Google Scholar] [CrossRef] [Green Version]
- Wu, G.; van der Helm, F.C.T.; (DirkJan) Veeger, H.E.J.; Makhsous, M.; Van Roy, P.; Anglin, C.; Nagels, J.; Karduna, A.R.; McQuade, K.; Wang, X.; et al. International Society of Biomechanics, Standardization and Terminology Committee. ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion—Part II: Shoulder, elbow, wrist and hand. J. Biomech. 2005, 38, 981–992. [Google Scholar] [CrossRef] [PubMed]
- Gupta, N.; Hauser, R. Kalman Filtering with Equality and Inequality State Constraints. arXiv 2017, arXiv:0709.2791. Available online: arxiv.org/abs/0709.2791 (accessed on 18 September 2007).
- Yang, L.; Zhang, L.; Dong, H.; Alelaiwi, A.; Saddik, A.E. Evaluating and Improving the Depth Accuracy of Kinect for Windows v2. IEEE Sens. J. 2015, 15, 4275–4285. [Google Scholar] [CrossRef]
- Naeemabadi, M.; Dinesen, B.; Andersen, O.K.; Hansen, J. Influence of a Marker-Based Motion Capture System on the Performance of Microsoft Kinect v2 Skeleton Algorithm. IEEE Sens. J. 2019, 19, 171–179. [Google Scholar] [CrossRef] [Green Version]
- Davis, R.B.; Õunpuu, S.; Tyburski, D.; Gage, J.R. A gait analysis data collection and reduction technique. Hum. Mov. Sci. 1991, 10, 575–587. [Google Scholar] [CrossRef]
- Cerveri, P.; Rabuffetti, M.; Pedotti, A.; Ferrigno, G. Real-time human motion estimation using biomechanical models and non-linear state-space filters. Med. Biol. Eng. Comput. 2003, 41, 109–123. [Google Scholar] [CrossRef]
- De Groote, F.; De Laet, T.; Jonkers, I.; De Schutter, J. Kalman smoothing improves the estimation of joint kinematics and kinetics in marker-based human gait analysis. J. Biomech. 2008, 41, 3390–3398. [Google Scholar] [CrossRef] [PubMed]
- Coleman, T.; Li, Y. An Interior Trust Region Approach for Nonlinear Minimization Subject to Bounds. Siam J. Optim. 1996, 6, 418–445. [Google Scholar] [CrossRef] [Green Version]
- Friston, K.J.; Ashburner, J.T.; Kiebel, S.J.; Nichols, T.E.; Penny, W.D. Statistical Parametric Mapping: The Analysis of Functional Brain Images, 2nd ed.; Academic Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Available online: http://www.spm1d.org/ (accessed on 8 July 2019).
- Donati, M.; Camomilla, V.; Vannozzi, G.; Cappozzo, A. Anatomical frame identification and reconstruction for repeatable lower limb joint kinematics estimates. J. Biomech. 2008. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task 1 | |||||||||
| RMSD () | 11.3 ± 2.6 | 3.0 ± 1.1 | 8.6 ± 3.5 | 6.5 ± 1.1 | 12.2 ± 3.3 | 3.9 ± 2.3 | 13.4 ± 7.0 | 7.2 ± 2.2 | |
| Lower Body | CC | 0.98 ± 0.01 | 0.85 ± 0.06 | 0.93 ± 0.05 | 0.99 ± 0.00 | 0.98 ± 0.01 | 0.85 ± 0.09 | 0.76 ± 0.35 | 0.98 ± 0.01 |
| RMSD | 7.5 ± 3.1 | 25.6 ± 6.4 | 15.3 ± 6.0 | 9.8 ± 2.4 | 8.3 ± 5.2 | 20.0 ± 5.3 | 17.5 ± 4.7 | 10.2 ± 2.1 | |
| Upper Body | CC | 0.78 ± 0.01 | 0.78 ± 0.15 | 0.94 ± 0.05 | 0.66 ± 0.24 | 0.80 ± 0.12 | 0.70 ± 0.18 | 0.93 ± 0.06 | 0.62 ± 0.2 |
| Task 2 | |||||||||
| RMSD | 8.1 ± 3.5 | 4.0 ± 2.0 | 17.9 ± 10.1 | 8.3 ± 5.4 | 9.7 ± 5.4 | 3.7 ± 2.5 | 20.4 ± 12.9 | 8.2 ± 8.1 | |
| Lower Body | CC | 0.98 ± 0.03 | 0.54 ± 0.33 | 0.81 ± 0.19 | 0.98 ± 0.03 | 0.97 ± 0.06 | 0.76 ± 0.16 | 0.69 ± 0.26 | 0.97 ± 0.05 |
| Task 3 | |||||||||
| RMSD | 9.1 ± 1.9 | 4.7 ± 2.6 | 9.7 ± 2.3 | 4.3 ± 2.5 | 6.7 ± 1.9 | ||||
| Lower Body + Trunk | CC | 0.97 ± 0.04 | 0.86 ± 0.15 | 0.97 ± 0.04 | 0.86 ± 0.19 | 0.79 ± 0.31 | |||
| Task 4 | |||||||||
| RMSD | 8.7 ± 3.8 | 5.6 ± 1.6 | 8.9 ± 3.6 | 5.0 ± 1.2 | 5.4 ± 2.5 | ||||
| Lower Body + Trunk | CC | 0.88 ± 0.09 | 0.98 ± 0.01 | 0.85 ± 0.10 | 0.98 ± 0.01 | 0.77 ± 0.32 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Colombel, J.; Bonnet, V.; Daney, D.; Dumas, R.; Seilles, A.; Charpillet, F. Physically Consistent Whole-Body Kinematics Assessment Based on an RGB-D Sensor. Application to Simple Rehabilitation Exercises. Sensors 2020, 20, 2848. https://doi.org/10.3390/s20102848
Colombel J, Bonnet V, Daney D, Dumas R, Seilles A, Charpillet F. Physically Consistent Whole-Body Kinematics Assessment Based on an RGB-D Sensor. Application to Simple Rehabilitation Exercises. Sensors. 2020; 20(10):2848. https://doi.org/10.3390/s20102848
Chicago/Turabian StyleColombel, Jessica, Vincent Bonnet, David Daney, Raphael Dumas, Antoine Seilles, and François Charpillet. 2020. "Physically Consistent Whole-Body Kinematics Assessment Based on an RGB-D Sensor. Application to Simple Rehabilitation Exercises" Sensors 20, no. 10: 2848. https://doi.org/10.3390/s20102848
APA StyleColombel, J., Bonnet, V., Daney, D., Dumas, R., Seilles, A., & Charpillet, F. (2020). Physically Consistent Whole-Body Kinematics Assessment Based on an RGB-D Sensor. Application to Simple Rehabilitation Exercises. Sensors, 20(10), 2848. https://doi.org/10.3390/s20102848