Skip Re-Entry Trajectory Detection and Guidance for Maneuvering Vehicles


Abstract
:1. Introduction
2. Equations and Constraints of Re-Entry Flight
3. Skip Re-Entry Detection Solution
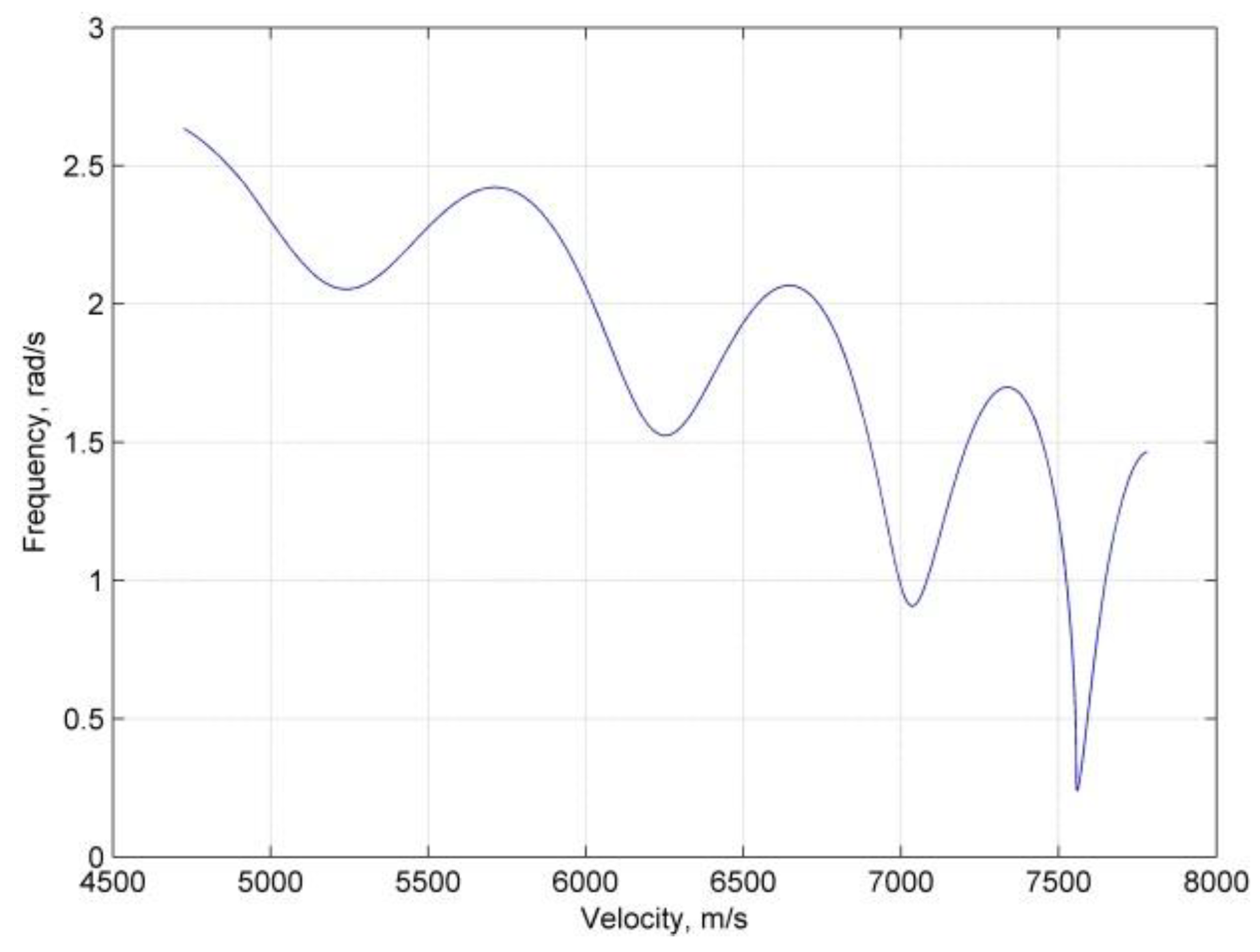
3.1. Analysis on Phugoid Oscillation
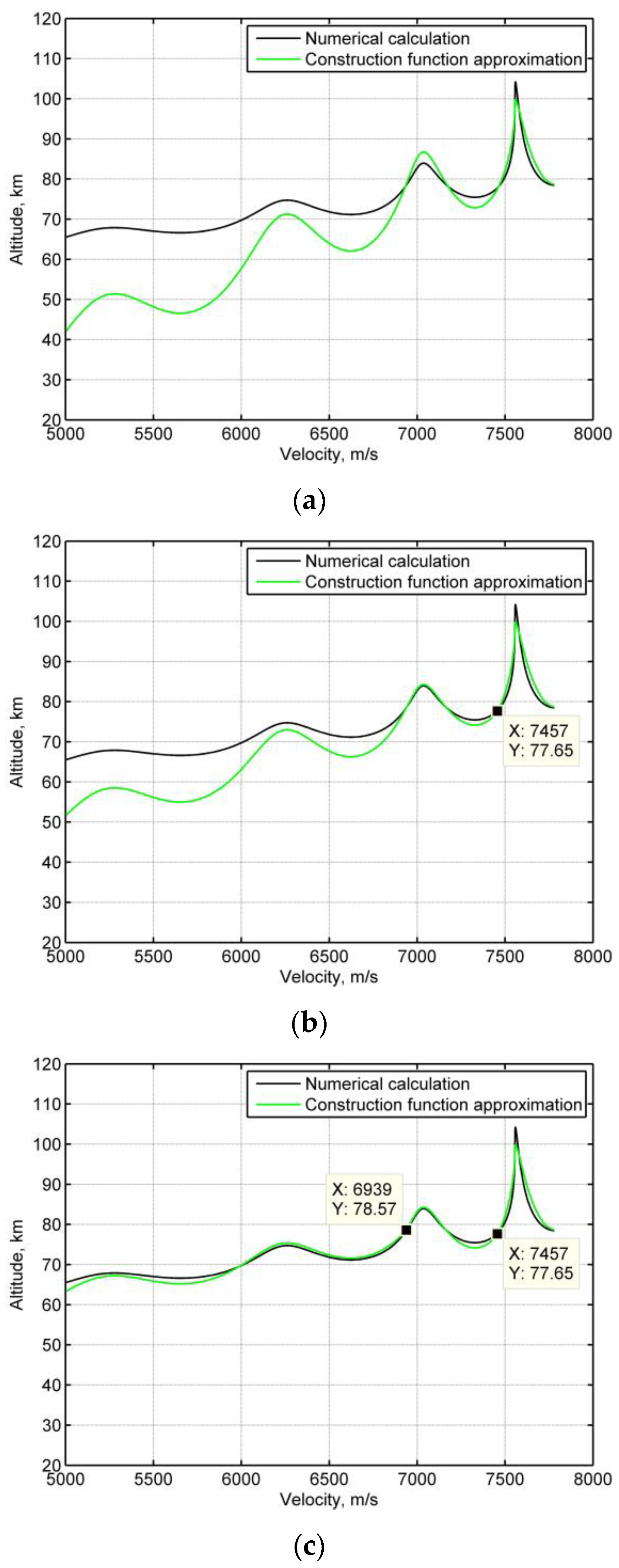
3.2. Skip Detection Based on Estimated Skip Altitude
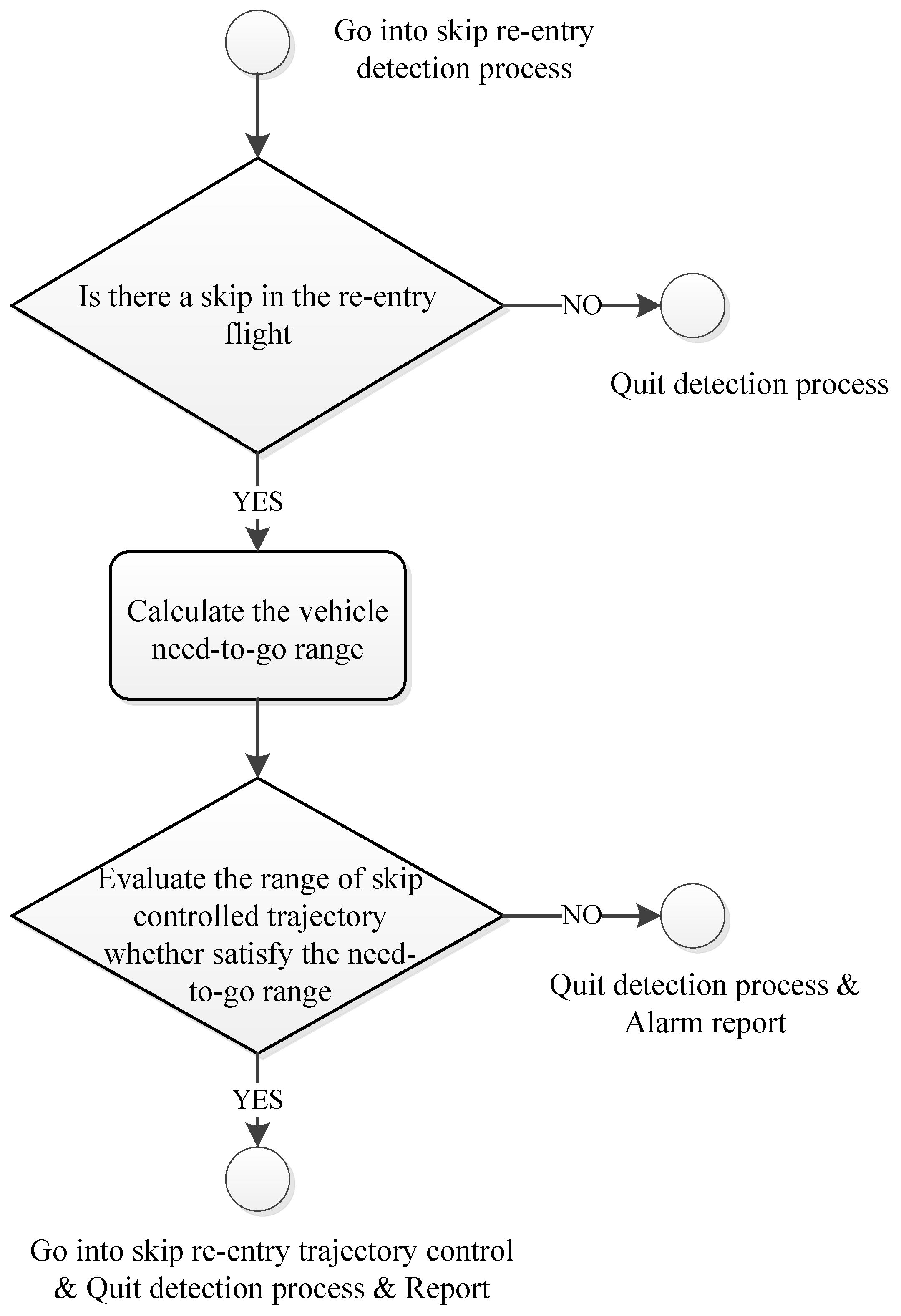
3.3. Skip Re-Entry Detection for Trajectory Control Logic
4. Skip Re-Entry Trajectory Control
- ➣
- Method 1: The reference trajectory-tracking algorithm
- ➣
- Method 2: The control phase transition logic
- ➣
- Method 3: The lateral guidance logic
| Algorithm 1. The motion model-based numerical search algorithm. |
| Input: Current re-entry motion state of the vehicle Output: Control variable:, 1: Calculate the range-to-go 2: Load Equation (1) state and parameters. 3: Load expected range threshold state:. 4: for [(increase 5 degrees per cycle) ] do 5: for () do 6: 3-DOF equations numerical integration output assignment 7: Compare and , call Method 2; 8: if then 9: , , call Method 3; 10: else 11: call Method 1; 12: , , call Method 3; 13: end 14: , input to 3-DOF equations and numerical integration; 15: if then 16: Calculate the current state ; 17: break; 18: end 19: end 20: end 21: According to given and , and database is built, and curve is fitted by the least square method; 22: Input and calculate ; 23: . |
5. Simulations and Results
5.1. Example Vehicle and Preset Parameters
5.2. Skip Re-Entry Detection
5.2.1. Mean Test
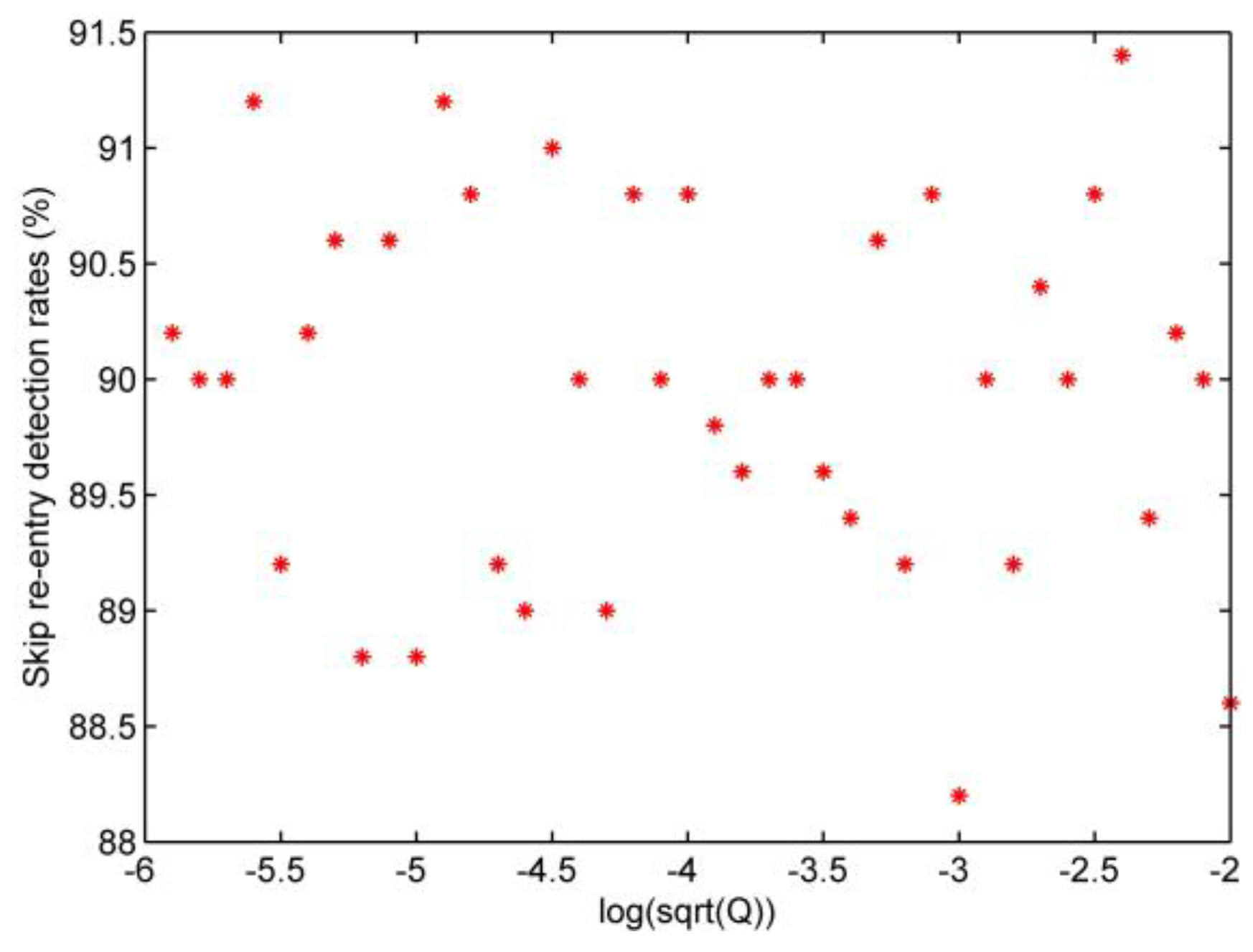
5.2.2. False Alarm Rate and Detection Rate Test
5.3. Skip Re-Entry Trajectory Control Test
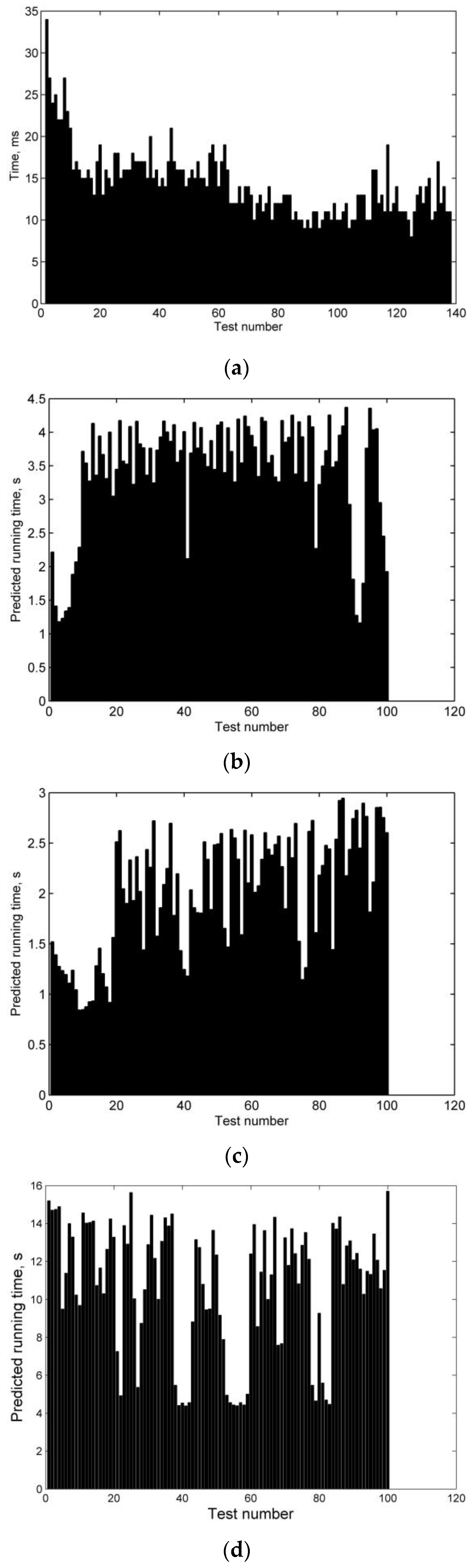
5.3.1. Execution Time Performance Test of the Numerical Search Algorithm
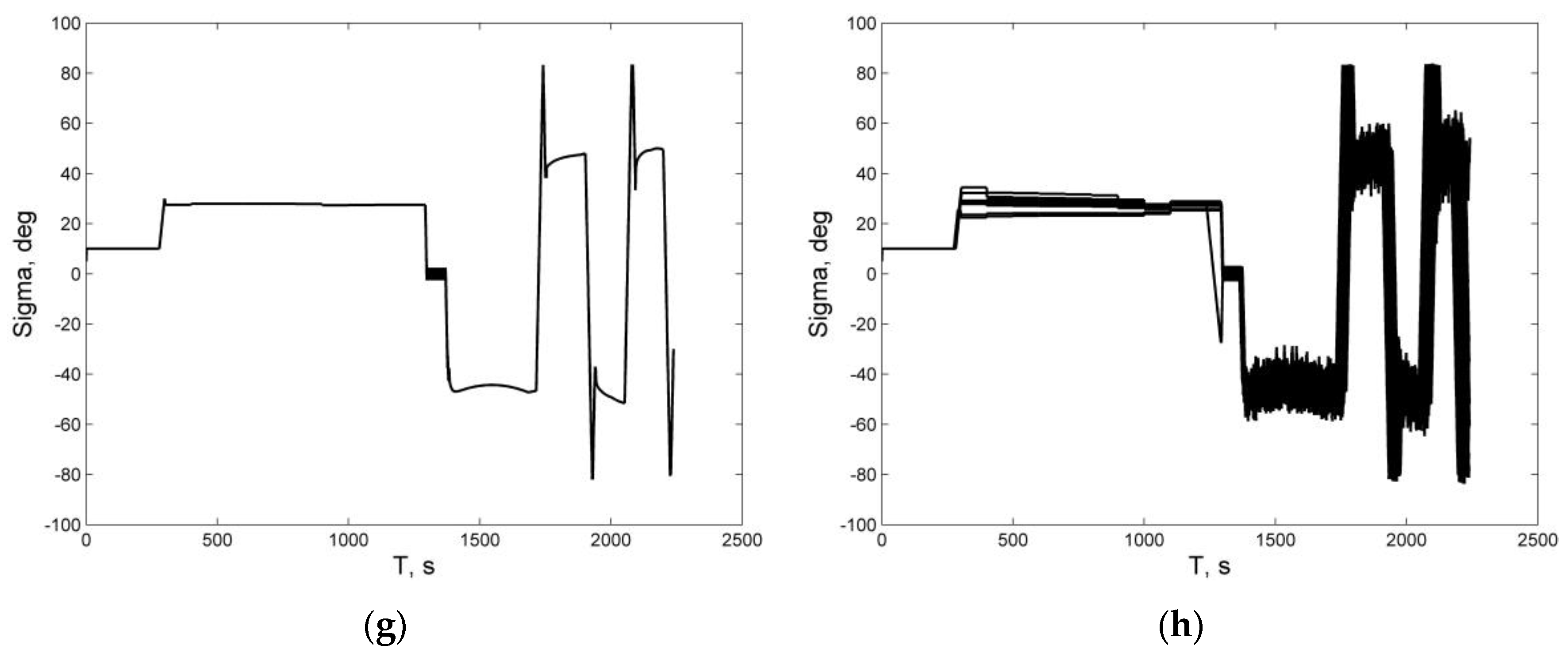
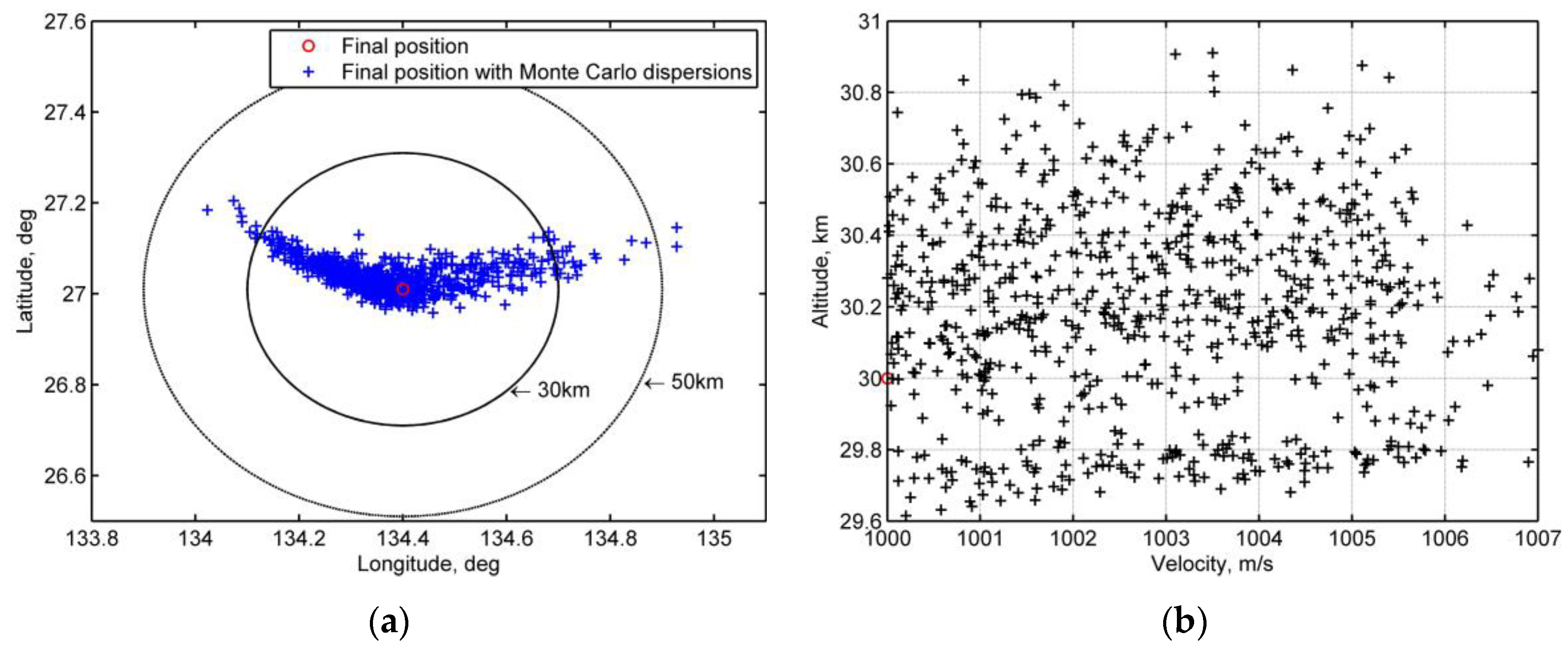
5.3.2. Skip Re-Entry Trajectory Control Test under Monte Carlo Method
5.4. Skip Re-Entry Detection and Trajectory Control Application
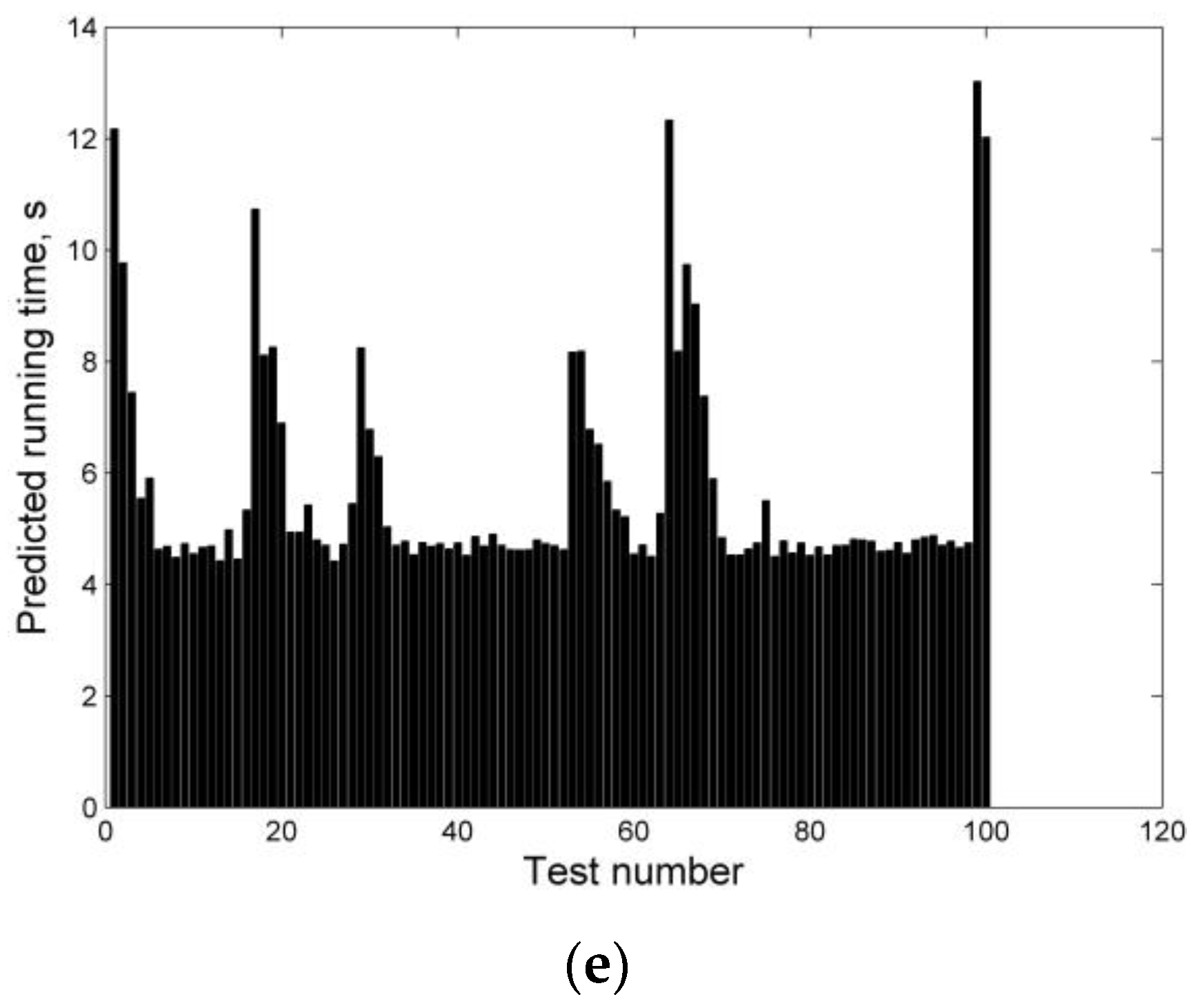
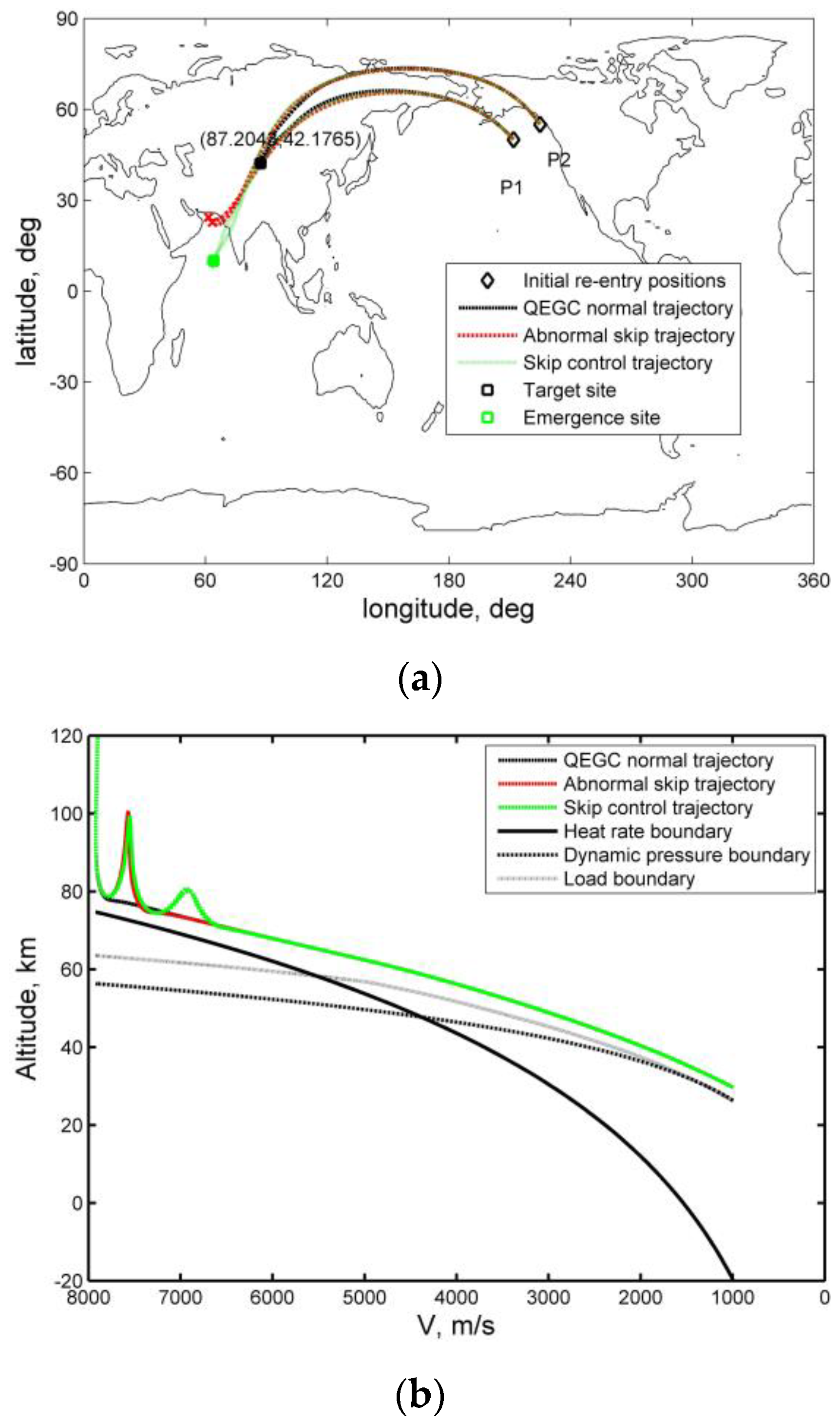
5.4.1. The Proposed Solution in Abnormal Skip Re-Entry Emergency Scenarios
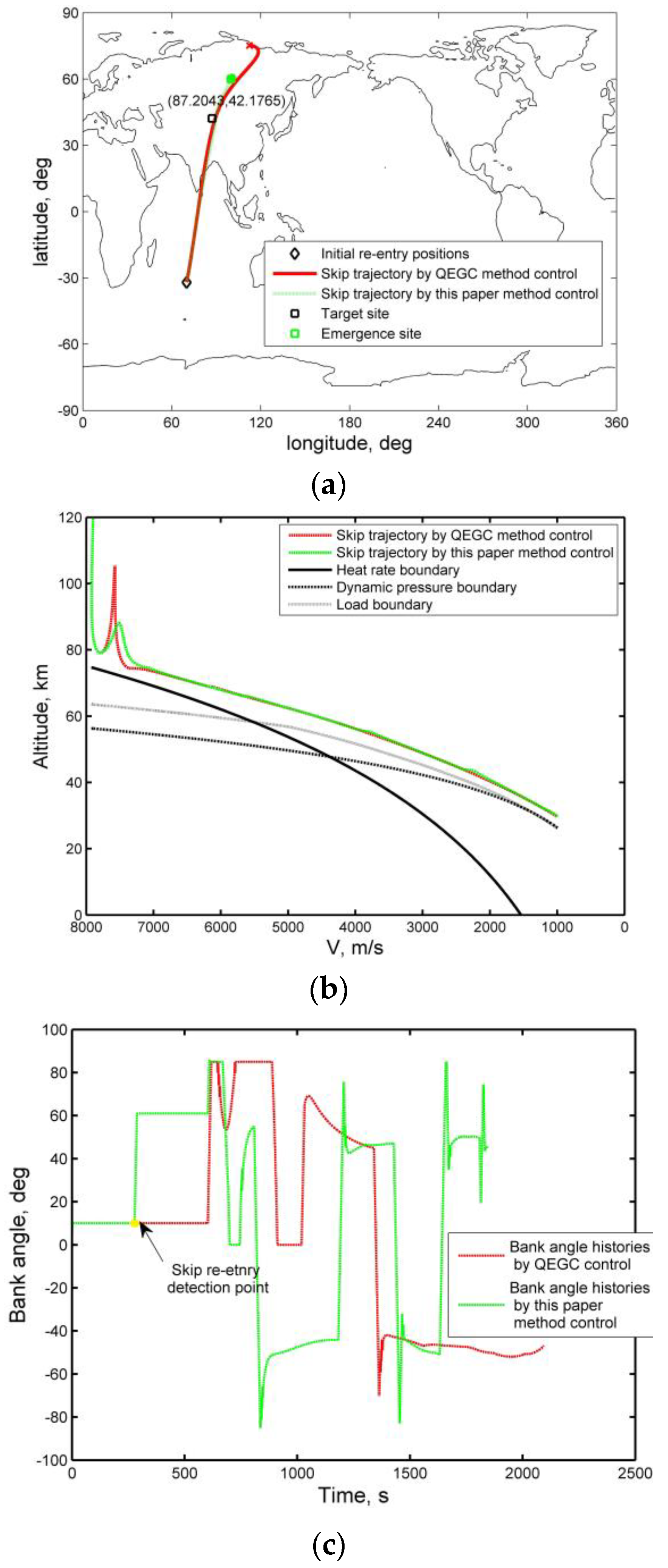
5.4.2. The Application of QEGC Method and the Proposed Solution in Abnormal Skip Re-Entry Scenarios
6. Discussion
7. Conclusions
- (1)
- An approximate analytical relationship is constructed for skip altitude estimation based on the oscillation frequency characteristic of the linearized re-entry motion equation of the vehicle. Based on the above analytical relationship, the skip re-entry detection method can be used as a standby tool of airborne monitoring in the form of software to alert the skipping during the re-entry process or to prepare to call other emergency trajectory control strategies;
- (2)
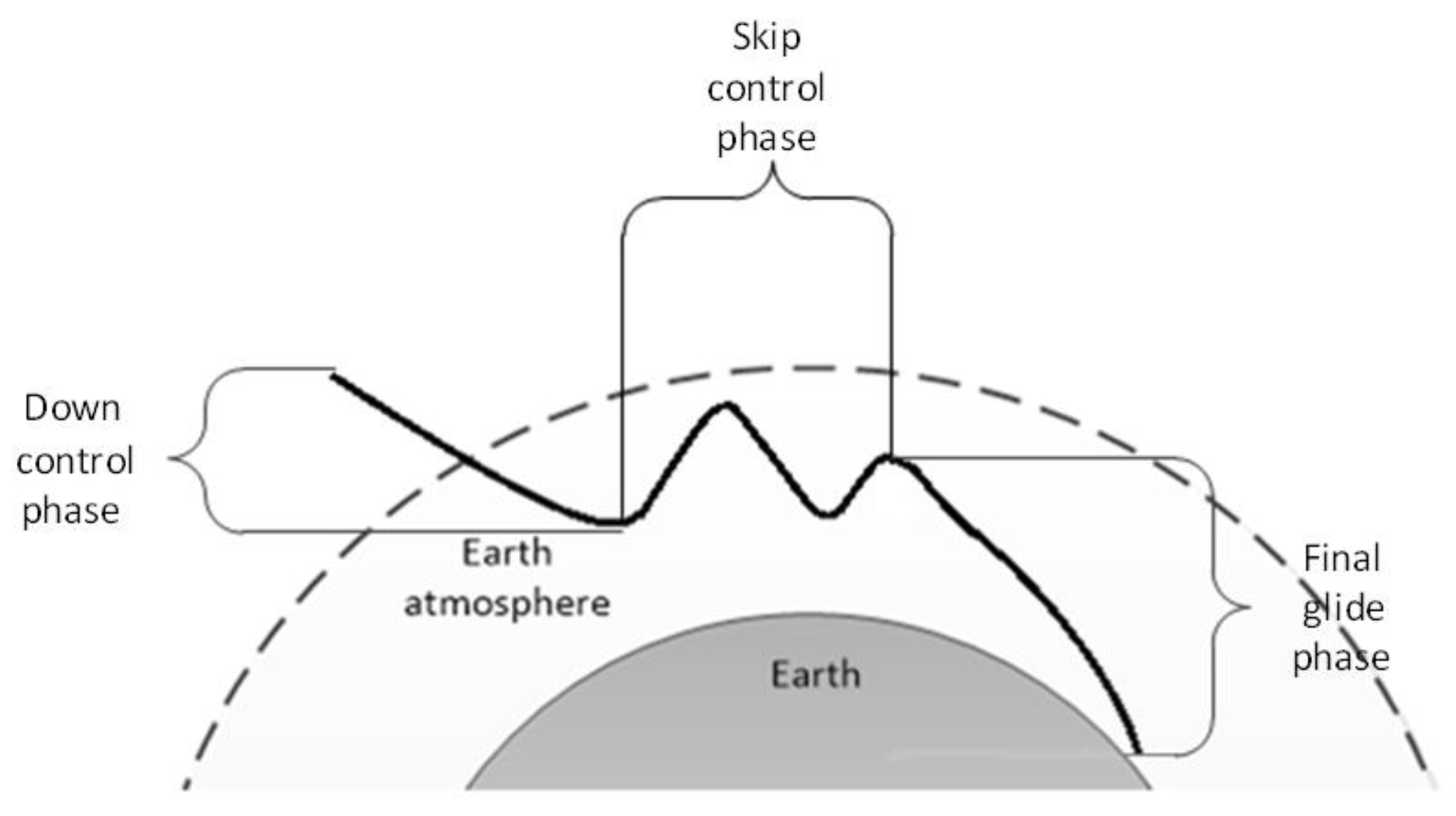
- Based on the pre-planned angle of attack profile, a phase separation of the down control, skip control, and final glide phases is employed in this paper. On this basis, a control phase transition logic-based on the range threshold under the velocity–altitude profile is proposed, which can smoothly connect the skip control phase and final glide phase, and provide support in calling related guidance algorithms at each phase to achieve a single or multiple skip re-entry to improve range capabilities;
- (3)
- Simulations further demonstrate that the proposed solution can achieve an expected detection rate, its running time is reasonable, and the trajectory control can satisfy path constraints and be robust under Monte Carlo dispersions. Finally, it has also been demonstrated that the method can guide the vehicle to an emergency area for recovery when it skips.
Author Contributions
Funding
Conflicts of Interest
References
- Jack, M.; Ehrlich, J. Space Shuttle Application of RLV Technologies. In Proceedings of the Space Program and Technologies Conference, Huntsville, AL, USA, 24–26 September 1996; AIAA: Huntsville, AL, USA, 1996. [Google Scholar]
- John, H. A Plan for Advanced Guidance and Control Technology for 2nd Generation Reusable Launch Vehicles. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002; AIAA: Monterey, CA, USA, 2002. [Google Scholar]
- Harpold, J.C.; Graves, C.A. Shuttle Entry Guidance: Mission Planning and Analysis Division; NASA-TM-79949; Johnson Space Center: Houston, TX, USA, February 1972.
- Roenneke, A.J.; Markl, A. Reentry Control to a Drag vs. Energy Profile. J. Guid. Control Dyn. 1993, 17, 916–920. [Google Scholar] [CrossRef]
- Mease, K.D.; Chen, D.T.; Teufel, P.; Schoenenberger, H. Reduced-order Entry Trajectory Planning for Acceleration Guidance. J. Guid. Control Dyn. 2002, 25, 257–266. [Google Scholar] [CrossRef]
- Guo, M.W.; Wang, D.Y. Guidance Law for Low-lift Skip Reentry Subject to Control Saturation Based on Nonlinear Predictive Control. Aerosp. Sci. Technol. 2014, 37, 48–54. [Google Scholar]
- Bharadwaj, S.; Rao, A.V.; Mease, K.D. Entry Trajectory Tracking Law via Feedback Linearization. J. Guid. Control Dyn. 1998, 21, 726–732. [Google Scholar] [CrossRef]
- Dukeman, G.A. Profile-following Entry Guidance using Linear Quadratic Regulator Theory. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002. [Google Scholar]
- Xie, Y.; Liu, L.H.; Tang, G.J.; Zheng, W. Highly Constrained Entry Trajectory Generation. Acta Astronaut. 2013, 88, 44–60. [Google Scholar] [CrossRef]
- Gao, G.Y.; Gao, Y.M.; Dong, Z.H. Preliminary Study on Visualization of Space Complex Electromagnetic Environment. Mod. Electron. Tech. 2012, 35, 132–139. [Google Scholar]
- Zhu, G.W.; Li, B.Q. Space Environment Effect and Countermeasure Research on Spacecraft. Aerosp. Shanghai 2002, 5, 9–16. [Google Scholar]
- Shen, Z.J.; Lu, P. Onboard Generation of Three-Dimensional Constrained Entry Trajectory. J. Guid. Control Dyn. 2003, 26, 111–121. [Google Scholar] [CrossRef]
- Lu, P. Entry Guidance: A Unified Method. J. Guid. Control Dyn. 2014, 37, 713–728. [Google Scholar] [CrossRef]
- Graves, C.A.; Harpold, J.C. Apollo Experience Report: Mission Planning for Apollo Entry; NASATN-D-6725; Johnson Space Center: Houston, TX, USA, March 1972.
- Hu, H.; Straube, T. Orion GN&C Overview and Architecture. In Proceedings of the AIAA Guidance, Navigation, and Control. Conference, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar] [CrossRef]
- Loh, W.H.T. Dynamics and Thermodynamics of Re-entry. J. Aerosp. Sci. 1960, 27, 748–762. [Google Scholar] [CrossRef]
- Loh, W.H.T. A Second-Order Theory of Entry Mechanics into a Planetary Atmosphere. J. Aerosp. Sci. 1962, 29, 1210–1237. [Google Scholar] [CrossRef]
- Vinh, N.X.; Kim, E.K.; Greenwood, D.T. Second-Order Analytic Solutions for Re-entry Trajectories. In Proceedings of the Flight Simulation and Technologies, Monterey, CA, USA, 9–11 August 1993. [Google Scholar] [CrossRef] [Green Version]
- Kluever, C.A. Entry Guidance Using Analytical Atmospheric Skip Trajectories. J. Guid. Control Dyn. 2008, 31, 1521–1535. [Google Scholar] [CrossRef]
- Eduardo, G.L. Analytic Development of a Reference Trajectory for Skip Entry. J. Guid. Control Dyn. 2011, 34, 311–317. [Google Scholar]
- Bairstow, S.H. Reentry Guidance with Extended Range Capability for Low L/D Spacecraft. Master’s Thesis, Department of Aeronautics and Astronnautics, Massachusetts Institute of Technology, Cambridge, MA, USA, February 2006. [Google Scholar]
- Putnm, Z.R.; Bairstow, S.H.; Braun, R.D.; Barton, G.H. Improving Lunar Return Entry Range Capability Using Enhanced Skip Trajectory Guidance. J. Spacecr. Rocket. 2008, 45, 309–315. [Google Scholar] [CrossRef]
- Brunner, C.W.; Lu, P. Skip Entry Trajectory Planning and Guidance. J. Guid. Control Dyn. 2008, 31, 1210–1219. [Google Scholar] [CrossRef]
- Brunner, C.W.; Lu, P. Comparison of Fully Numerical Predictor–corrector and Apollo Skip Entry Guidance Algorithm. J. Astronaut. Sci. 2012, 59, 517–540. [Google Scholar] [CrossRef]
- Luo, Z.F.; Zhang, H.B.; Tang, G.J. Blend Skip Entry Guidance for Low-Lifting Lunar Return Vehicles. Acta Mech. Sin. 2014, 30, 973–982. [Google Scholar] [CrossRef]
- Luo, Z.F.; Zhang, H.B.; Tang, G.J. Skip Entry Guidance using Numerical Predictor–corrector and Patched Corridor. Acta Astronaut. 2015, 117, 8–18. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, Z.B.; Cheng, Y.; Zhang, Q.Z.; Ni, K. Multi-Constrained Predictor–corrector Reentry Guidance for Hypersonic Vehicles. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 232, 3049–3067. [Google Scholar] [CrossRef]
- Liu, X.F.; Shen, Z.J.; Lu, P. Entry Trajectory Optimization by Second-Order Cone Programming. J. Guid. Control Dyn. 2016, 39, 227–241. [Google Scholar] [CrossRef]
- Wang, Z.B.; Grant, M.J. Autonomous Entry Guidance for Hypersonic Vehicles by Convex Optimization. J. Spacecr. Rocket. 2018, 55, 993–1006. [Google Scholar] [CrossRef]
- James, M.; Stephane, R.; Hubert, F.; Etienne, P. An Analytic Aerocapture Guidance Algorithm for the Mars Sample Return Orbiter. In Proceedings of the Atmospheric Flight Mechanics Conference, Denver, CO, USA, 14–17 August 2000. [Google Scholar] [CrossRef]
- Lu, P.; Cerimele, C.J.; Tigges, M.A.; Matz, D.A. Optimal Aerocapture Guidance. J. Guid. Control Dyn. 2015, 38, 553–565. [Google Scholar] [CrossRef]
- Webb, K.D.; Lu, P.; Dwyer Cianciolo, A.M. Aerocapture Guidance for a Human Mars Mission. In Proceedings of the AIAA Guidance, Navigation, and Control. Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar] [CrossRef]
- Vinh, N.X. Optimal Trajectory in Atmospheric Flight; Elsevier Scientific Pub. Co.: New York, NY, USA, 1981; pp. 58–60. [Google Scholar]
- U.S. Standard Atmosphere; U.S. Government Printing Office: Washington, DC, USA, October 1976.
- Lu, P. Asymptotic Analysis of Quasi-equilibrium Glide in Lifting Entry Flight. J. Guid. Control Dyn. 2006, 29, 662–670. [Google Scholar] [CrossRef]
- Mooij, E. Characteristic Motion of Re-entry Vehicles. In Proceedings of the AIAA Atmospheric Flight Mechanics (AFM) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar] [CrossRef]
- Ferreira, L.D.O. Nonlinear Dynamic and Stability of Hypersonic Reentry Vehicles; University of Michigan: Ann Arbor, MI, USA, 1995. [Google Scholar]
- Etkin, B. Longitudinal Dynamics of a Lifting Vehicle in Orbital Flight. J. Aerosp. Sci. 1961, 28, 779–832. [Google Scholar] [CrossRef]
- Chou, Y.S.; Laitone, E.V. Phugoid Oscillations at Hypersonic Speeds. AIAA J. 1965, 3, 732–735. [Google Scholar] [CrossRef]
- Lu, P.; Xue, S.B. Rapid Generation of Accurate Entry Landing Footprints. J. Guid. Control Dyn. 2010, 33, 756–767. [Google Scholar] [CrossRef]
- Aerodynamic Design Data Book; Volume 1M Orbiter Vehicle STS-1; NASA-CR-160903; NASA: Washington, DC, USA, 1980.
- Zhou, W.; Tan, S.; Chen, H. A Simple Reentry Trajectory Generation and Tracking Scheme for Common Aero Vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control. Conference, Minneapolis, MI, USA, 13–16 August 2012. [Google Scholar] [CrossRef]
- Shen, Z.J.; Lu, P. Dynamic Lateral Entry Guidance Logic. J. Guid. Control Dyn. 2004, 27, 949–959. [Google Scholar] [CrossRef]
- Findlay, J.T.; Kelly, G.M.; Troutman, P.A. Shuttle Derived Atmospheric Density Model; NASA-CR-171824; NASA: Washington, DC, USA, December 1984.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Mission1 | Mission1 | Mission2 | Mission3 |
|---|---|---|---|---|
| Initial altitude of re-entry, km | 120 | 120 | 120 | 120 |
| Initial longitude of re-entry, deg | 5 | 212 | 225 | 70 |
| Initial latitude of re-entry, deg | 5 | 50 | 55 | −32 |
| Initial Earth-relative velocity of re-entry, m/s | 7900 | 7900 | 7900 | 7900 |
| Initial flight path angle of re-entry, deg | −1.5 | −1.5 | −1.5 | −1.5 |
| Longitude of target site, deg | 87.2043 | 87.2043 | 87.2043 | 87.2043 |
| Latitude of target site, deg | 42.1765 | 42.1765 | 42.1765 | 42.1765 |
| Terminal altitude, km | 30 | 30 | 30 | 30 |
| Terminal velocity, m/s | 1000 | 1000 | 1000 | 1000 |
| Longitude of emergency site, deg | 134.4 | 64 | 64 | 100 |
| Latitude of emergency site, deg | 27 | 10 | 10 | 60 |
| Parameters | Distribution | Max |
|---|---|---|
| Re-entry initial longitude, deg | Gaussian | 0.1 |
| Re-entry initial latitude, deg | Gaussian | 0.1 |
| Re-entry initial relative velocity, m/s | Gaussian | 5 |
| Re-entry initial flight path angle, deg | Gaussian | 0.05 |
| Re-entry initial heading angle, deg | Gaussian | 0.5 |
| CL | Gaussian | 20% |
| CD | Gaussian | 20% |
| Atmospheric density | Analytical | 30% |
| Mass, kg | Uniform | ±1% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Zhang, S. Skip Re-Entry Trajectory Detection and Guidance for Maneuvering Vehicles. Sensors 2020, 20, 2976. https://doi.org/10.3390/s20102976
Sun H, Zhang S. Skip Re-Entry Trajectory Detection and Guidance for Maneuvering Vehicles. Sensors. 2020; 20(10):2976. https://doi.org/10.3390/s20102976
Chicago/Turabian StyleSun, Hongqiang, and Shuguang Zhang. 2020. "Skip Re-Entry Trajectory Detection and Guidance for Maneuvering Vehicles" Sensors 20, no. 10: 2976. https://doi.org/10.3390/s20102976
APA StyleSun, H., & Zhang, S. (2020). Skip Re-Entry Trajectory Detection and Guidance for Maneuvering Vehicles. Sensors, 20(10), 2976. https://doi.org/10.3390/s20102976