Estimating Human Wrist Stiffness during a Tooling Task


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Setup, Methods and Robotic Validation
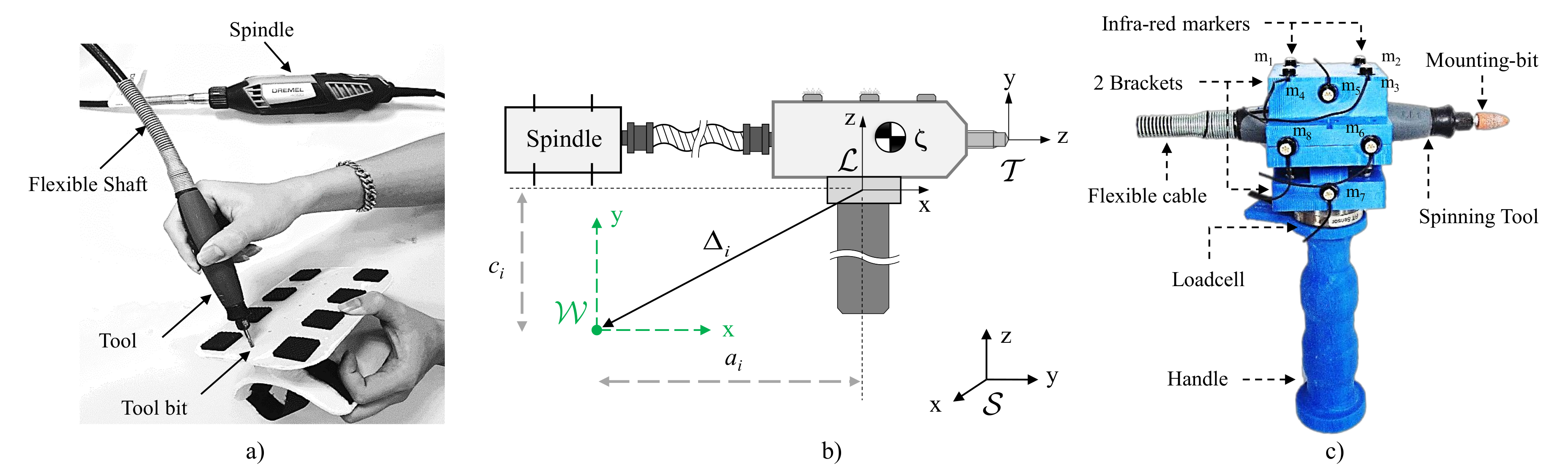
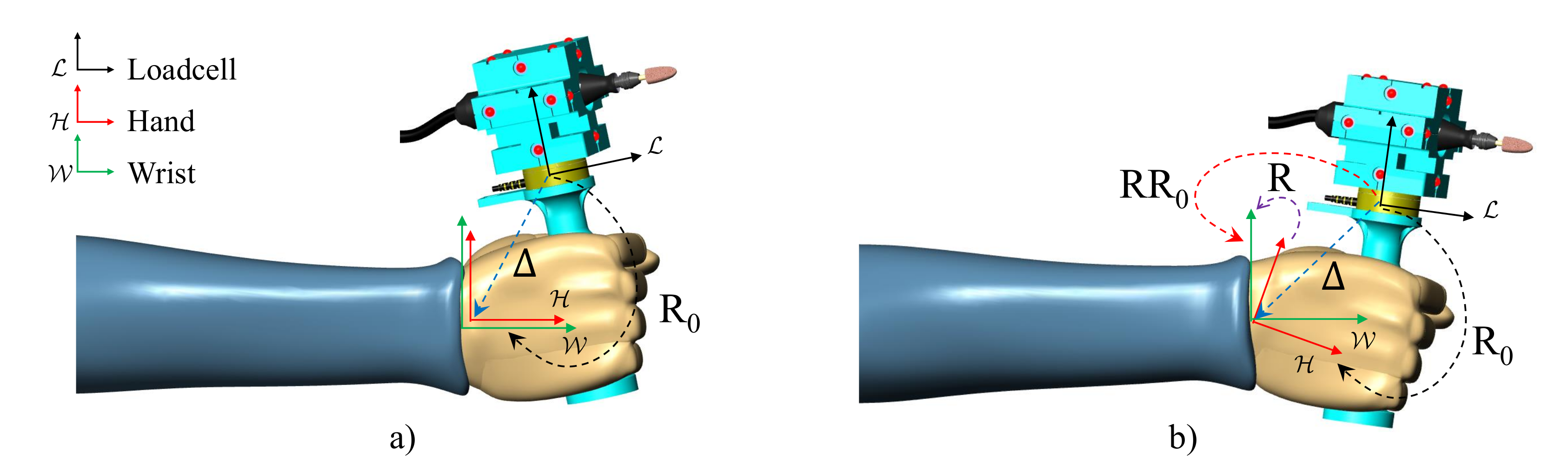
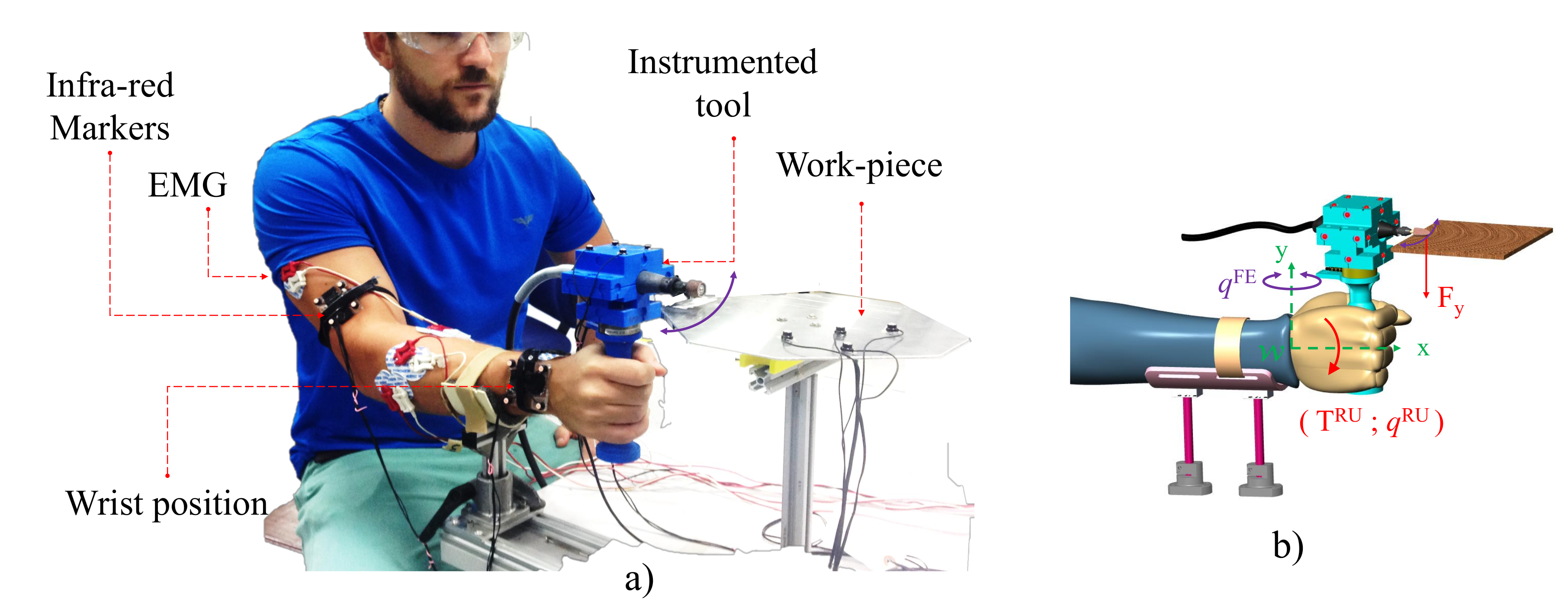
2.1. Instrumented Tool: 3D Kinematics, Force and Torque Estimation
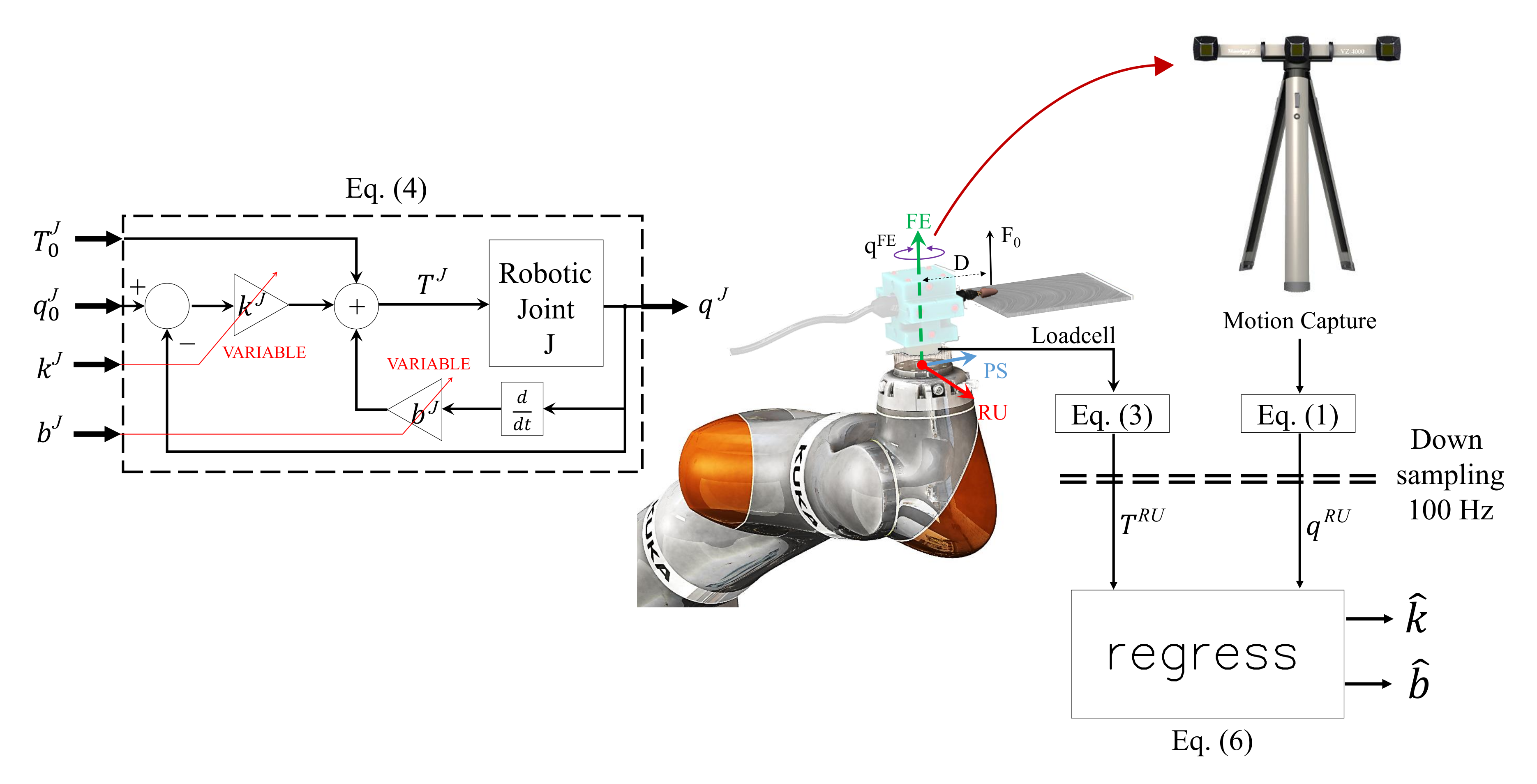
2.2. Compliant Robots: Impedance-Controlled Joints
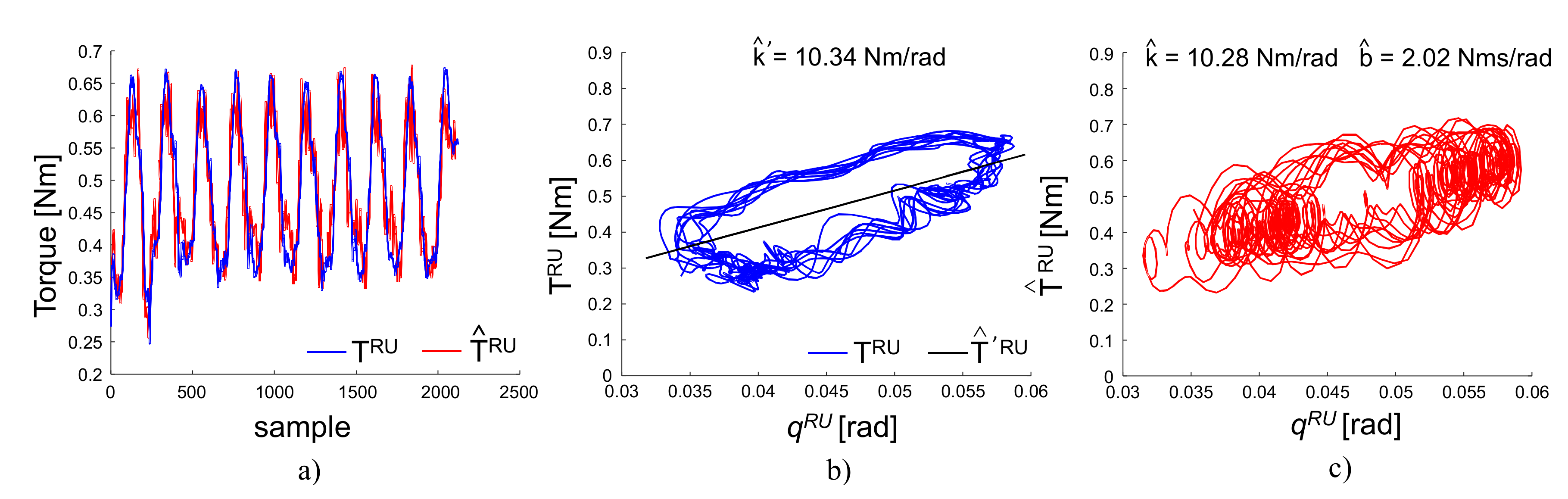
2.3. Robotic Impedance Estimation during Tooling Tasks
3. Estimation of Human Operators’ Joint Stiffness During Tooling Tasks
3.1. Experiments and Setup
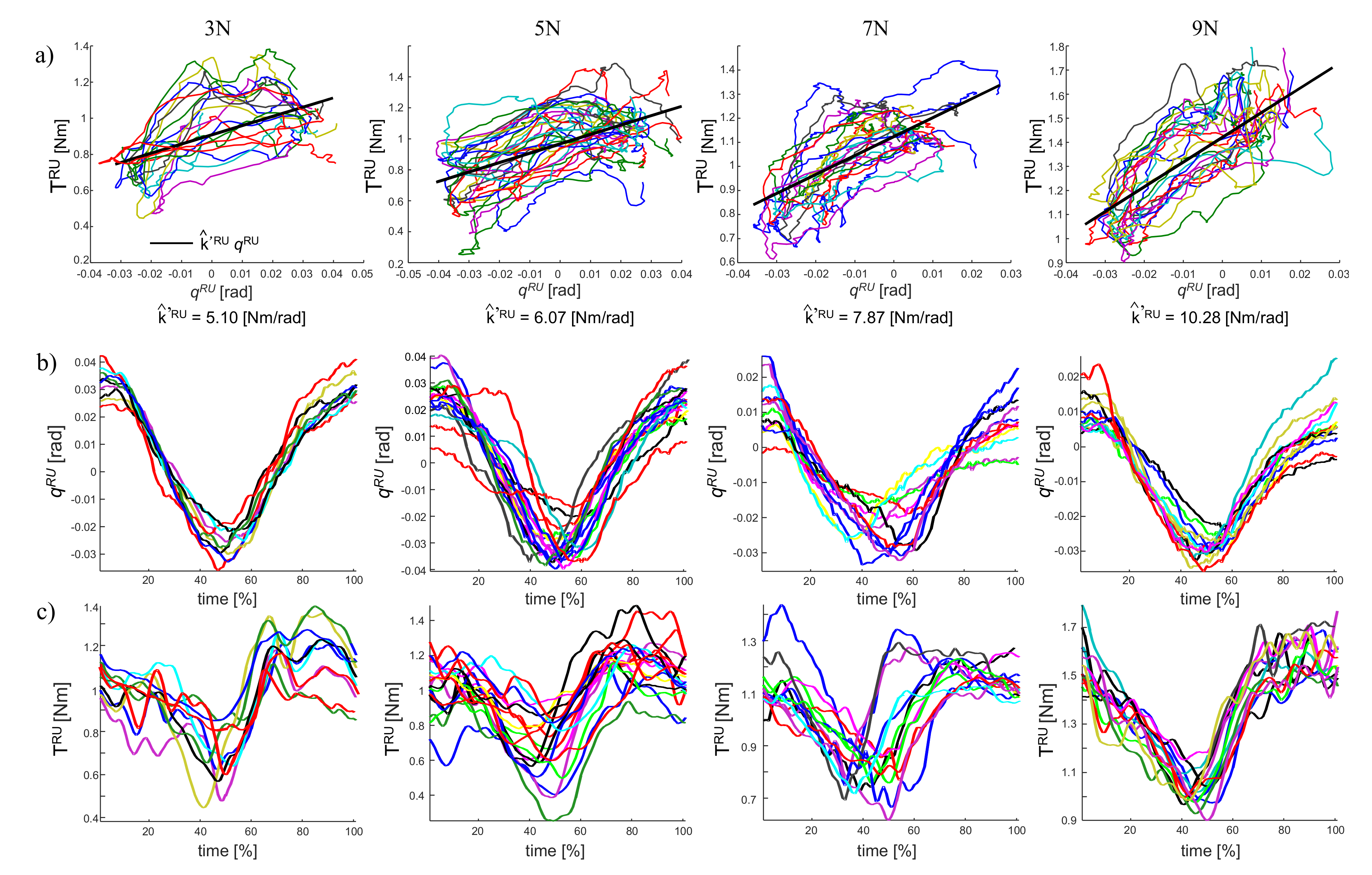
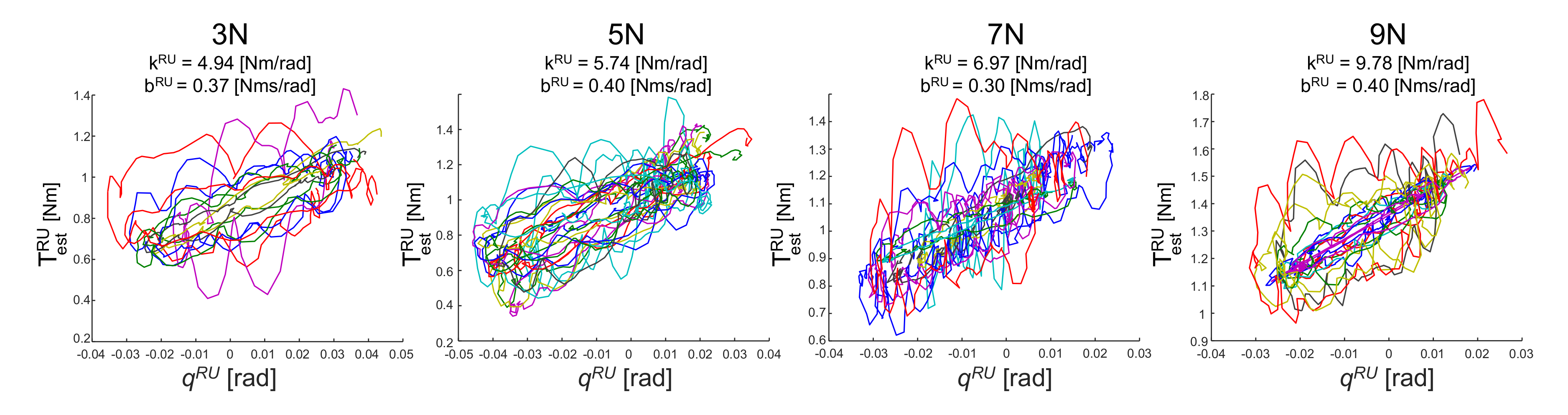
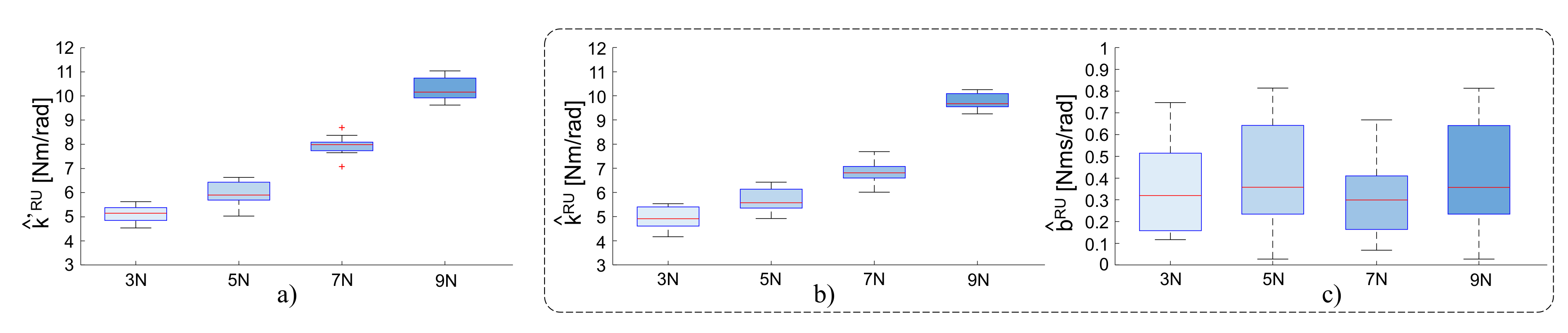
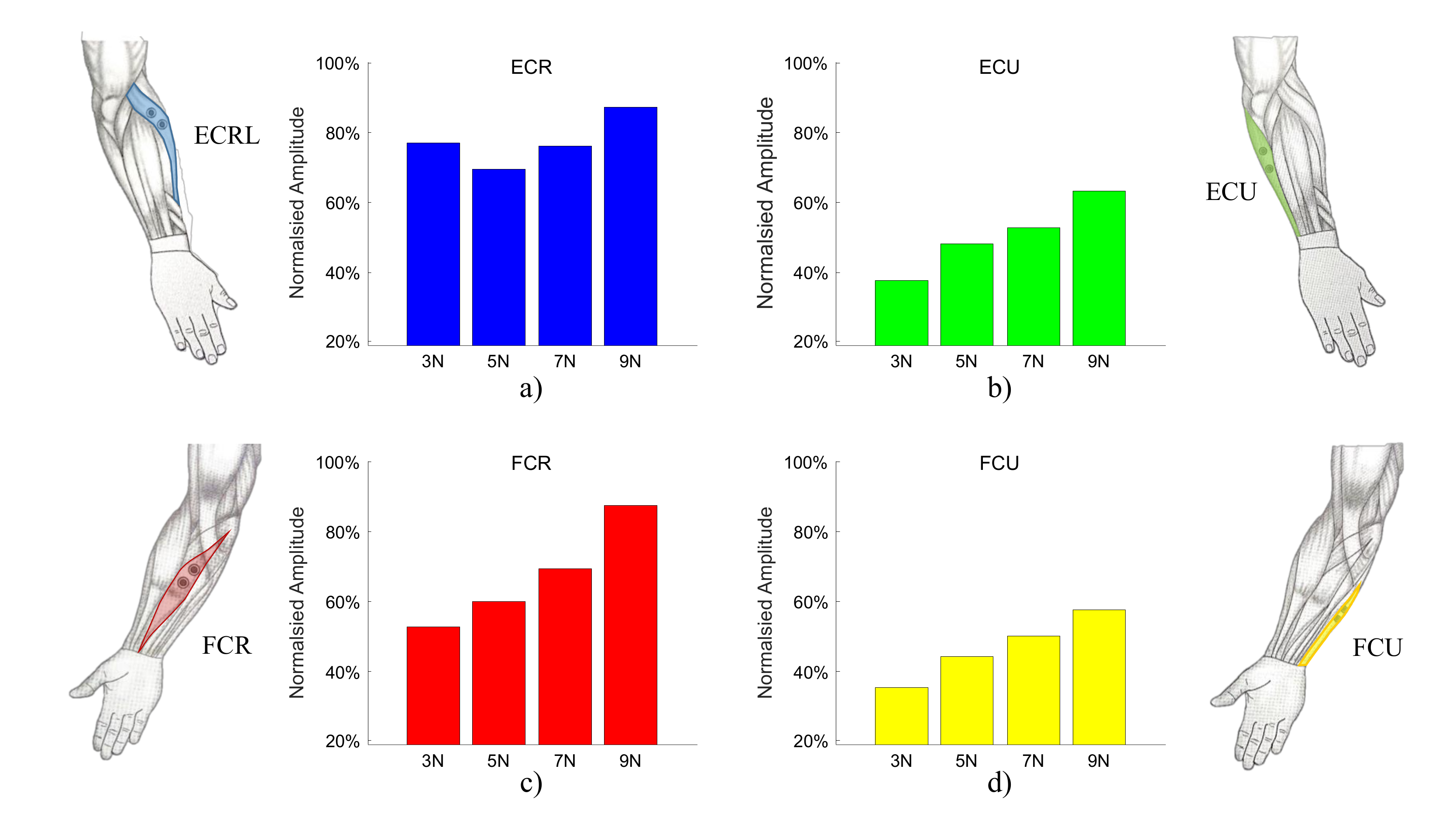
3.2. Impedance and Muscle Effort Dependence on Force
4. Conclusions and Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Shadmehr, R.; Mussa-Ivaldi, F.A. Adaptive representation of dynamics during learning of a motor task. J. Neurosci. 1994, 14, 3208–3224. [Google Scholar] [CrossRef]
- Burdet, E.; Osu, R.; Franklin, D.W.; Milner, T.E.; Kawato, M. The central nervous system stabilizes unstable dynamics by learning optimal impedance. Nature 2001, 414, 446–449. [Google Scholar] [CrossRef] [PubMed]
- Chib, V.S.; Patton, J.L.; Lynch, K.M.; Mussa-Ivaldi, F.A. Haptic identification of surfaces as fields of force. J. Neurophysiol. 2006, 95, 1068–1077. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, C.; Ganesh, G.; Haddadin, S.; Parusel, S.; Albu-Schaeffer, A.; Burdet, E. Human-like adaptation of force and impedance in stable and unstable interactions. IEEE Trans. Robot. 2011, 27, 918–930. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ganesh, G.; Jarrasse, N.; Haddadin, S.; Albu-Schaeer, A.; Burdet, E. Force, impedance, and trajectory learning for contact tooling and haptic identification. IEEE Trans. Robot. 2018, 34, 1170–1182. [Google Scholar] [CrossRef] [Green Version]
- Calinon, S. Robot Programming by Demonstration; EPFL Press: Lausanne, Switzerland, 2009. [Google Scholar]
- Ng, W.X.; Chan, H.K.; Teo, W.K.; Chen, I.-M. Programming a robot for conformance grinding of complex shapes by capturing the tacit knowledge of a skilled operator. IEEE Trans. Autom. Sci. Eng. 2015, 14, 1020–1030. [Google Scholar] [CrossRef]
- Park, K.; Chang, P.H.; Kang, S. In vivo estimation of human forearm and wrist dynamic properties. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 436–446. [Google Scholar] [CrossRef]
- Murray, R.M.; Li, Z.; Sastry, S.S. A Mathematical Introduction to Robotic Manipulation; CRC Press: Boca Raton, FL, USA, 1994. [Google Scholar]
- Hogan, N. Adaptive control of mechanical impedance by coactivation of antagonist muscles. IEEE Trans. Autom. Control. 1984, 29, 681–690. [Google Scholar] [CrossRef] [Green Version]
- Burdet, E.; Tee, K.P.; Mareels, I.; Milner, T.E.; Chew, C.M.; Franklin, D.W.; Osu, R.; Kawato, M. Stability and motor adaptation in human arm movements. Biol. Cybern. 2006, 94, 20–32. [Google Scholar] [CrossRef]
- Casadio, M.; Pressman, A.; Mussa-Ivaldi, F.A. Learning to push and learning to move: The adaptive control of contact forces. Front. Comput. Neurosci. 2015, 9, 118. [Google Scholar] [CrossRef] [Green Version]
- Ajoudani, A.; Tsagarakis, N.G.; Bicchi, A. Tele-impedance: Teleoperation with impedance regulation using a body-machine interface. Int. J. Robot. Res. 2012, 31, 1642–1656. [Google Scholar] [CrossRef]
- Ajoudani, A.; Gabiccini, M.; Tsagarakis, N.G.; Bicchi, A. Human-Like Impedance and Minimum Effort Control for Natural and Efficient Manipulation. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6 May 2013; pp. 4499–4505. [Google Scholar]
- Howard, M.; Braun, D.J.; Vijayakumar, S. Transferring human impedance behavior to heterogeneous variable impedance actuators. IEEE Trans. Robot. 2013, 29, 847–862. [Google Scholar] [CrossRef] [Green Version]
- Ficuciello, F.; Villani, L.; Siciliano, B. Variable impedance control of redundant manipulators for intuitive human–robot physical interaction. IEEE Trans. Robot. 2015, 31, 850–863. [Google Scholar] [CrossRef] [Green Version]
- Nehaniv, C.; Dautenhahn, K. The Correspondence Problem; MIT Press: Cambridge, MA, USA, 2002. [Google Scholar]
- Hogan, N. Mechanical impedance of single-and multi-articular systems. In Multiple Muscle Systems; Springer: Berlin, Germany, 1990; pp. 149–164. [Google Scholar]
- Mussa-Ivaldi, F.A.; Hogan, N.; Bizzi, E. Neural, mechanical, and geometric factors subserving arm posture in humans. J. Neurosci. 1985, 5, 2732–2743. [Google Scholar] [CrossRef] [PubMed]
- Tsuji, T.; Morasso, P.G.; Goto, K.; Ito, K. Human hand impedance characteristics during maintained posture. Biol. Cybern. 1995, 72, 475–485. [Google Scholar] [CrossRef] [PubMed]
- Won, J.; Hogan, N. Stability properties of human reaching movements. Exp. Brain Res. 1995, 107, 125–136. [Google Scholar] [CrossRef]
- Gomi, H.; Kawato, M. Human arm stiffness and equilibrium-point trajectory during multi-joint movement. Biol. Cybern. 1997, 76, 163–171. [Google Scholar] [CrossRef]
- Burdet, E.; Osu, R.; Franklin, D.; Yoshioka, T.; Milner, T.; Kawato, M. A method for measuring endpoint stiffness during multi-joint arm movements. J. Biomech. 2000, 33, 1705–1709. [Google Scholar] [CrossRef]
- Piovesan, D.; Morasso, P.; Giannoni, P.; Casadio, M. Arm stiffness during assisted movement after stroke: The influence of visual feedback and training. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 21, 454–465. [Google Scholar] [CrossRef]
- Hogan, N. The mechanics of multi-joint posture and movement control. Biol. Cybern. 1985, 52, 315–331. [Google Scholar] [CrossRef]
- Loncaric, J. Normal forms of stiffness and compliance matrices. IEEE J. Robot. Autom. 1987, 3, 567–572. [Google Scholar] [CrossRef]
- Zefran, M.; Kumar, V. A geometrical approach to the study of the Cartesian stiffness matrix. J. Mech. Des. 2002, 124, 30–38. [Google Scholar] [CrossRef]
- English, C.E.; Russell, D.L. Representations of multi-joint stiffness for prosthetic limb design. Mech. Mach. Theory 2008, 43, 297–309. [Google Scholar] [CrossRef]
- Campolo, D. Cartesian stiffness for wrist joints: Analysis on the Lie group of 3D rotations and geometric approximation for experimental evaluation. Comput. Methods Biomech. Biomed. Eng. 2013, 16, 975–986. [Google Scholar] [CrossRef]
- Burdet, E.; Franklin, D.W.; Milner, T.E. Human Robotics: Neuromechanics and Motor Control; MIT Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Formica, D.; Charles, S.K.; Zollo, L.; Guglielmelli, E.; Hogan, N.; Krebs, H.I. The passive stiffness of the wrist and forearm. J. Neurophysiol. 2012, 108, 1158–1166. [Google Scholar] [CrossRef] [Green Version]
- Perreault, E.J.; Kirsch, R.F.; Acosta, A.M. Multiple-input, multiple-output system identification for characterization of limb stiffness dynamics. Biol. Cybern. 1999, 80, 327–337. [Google Scholar] [CrossRef]
- Perreault, E.J.; Kirsch, R.F.; Crago, P.E. Effects of voluntary force generation on the elastic components of endpoint stiffness. Exp. Brain Res. 2001, 141, 312–323. [Google Scholar] [CrossRef]
- Ludvig, D.; Perreault, E.J. System identification of physiological systems using short data segments. Trans. Bio-Med Eng. 2012, 59, 3541–3549. [Google Scholar] [CrossRef] [Green Version]
- Höppner, H.; Grebenstein, M.; van der Smagt, P. Two-Dimensional Orthoglide Mechanism for Revealing Areflexive Human Arm Mechanical Properties. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 1178–1185. [Google Scholar]
- Masia, L.; Squeri, V. A modular mechatronic device for arm stiffness estimation in human–robot interaction. IEEE/ASME Trans. Mechatron. 2015, 20, 2053–2066. [Google Scholar] [CrossRef]
- Rafieian, F.; Hazel, B.; Liu, Z. Vibro-impact dynamics of material removal in a robotic grinding process. Int. J. Adv. Manuf. Technol. 2014, 73, 949–972. [Google Scholar] [CrossRef]
- Phan, G.-H.; Tommasino, P.; Hussain, A.; Hansen, C.; Castagne, S.; Campolo, D. Geometry of contact during tooling tasks via dynamic estimation. Int. J. Adv. Manuf. Technol. 2018, 94, 2895–2904. [Google Scholar] [CrossRef]
- Bicchi, A.; Salisbury, J.K.; Brock, D.L. Contact sensing from force measurements. Int. J. Robot. Res. 1993, 12, 249–262. [Google Scholar] [CrossRef] [Green Version]
- Campolo, D.; Widjaja, F.; Esmaeili, M.; Burdet, E. Pointing with the wrist: A postural model for Donders’ law. Exp. Brain Res. 2011, 212, 417–427. [Google Scholar] [CrossRef]
- Ott, C. Cartesian Impedance Control of Redundant and Flexible-Joint Robots; Springer: Berlin, Germany, 2008. [Google Scholar]
- Albu-Schaffer, A.; Eiberger, O.; Grebenstein, M.; Haddadin, S.; Ott, C.; Wimbock, T.; Wolf, S.; Hirzinger, G. Soft robotics. IEEE Robot. Autom. Mag. 2008, 15, 20–30. [Google Scholar] [CrossRef]
- Siciliano, B.; Villani, L. Robot Force Control; Springer Science & Business Media: Berlin, Germany, 2012; Volume 540. [Google Scholar]
- Hoffman, D.S.; Strick, P.L. Step-tracking movements of the wrist. IV. Muscle activity associated with movements in different directions. J. Neurophysiol. 1999, 81, 319–333. [Google Scholar] [CrossRef] [Green Version]
- Roland, T.; Amsuess, S.; Russold, M.F.; Baumgartner, W. Ultra-low-power digital filtering for insulated EMG sensing. Sensors 2019, 19, 959. [Google Scholar] [CrossRef] [Green Version]
- Gomi, H.; Osu, R. Task-dependent viscoelasticity of human multijoint arm and its spatial characteristics for interaction with environments. J. Neurosci. 1998, 18, 8965–8978. [Google Scholar] [CrossRef] [Green Version]










© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phan, G.-H.; Hansen, C.; Tommasino, P.; Budhota, A.; Mohan, D.M.; Hussain, A.; Burdet, E.; Campolo, D. Estimating Human Wrist Stiffness during a Tooling Task. Sensors 2020, 20, 3260. https://doi.org/10.3390/s20113260
Phan G-H, Hansen C, Tommasino P, Budhota A, Mohan DM, Hussain A, Burdet E, Campolo D. Estimating Human Wrist Stiffness during a Tooling Task. Sensors. 2020; 20(11):3260. https://doi.org/10.3390/s20113260
Chicago/Turabian StylePhan, Gia-Hoang, Clint Hansen, Paolo Tommasino, Aamani Budhota, Dhanya Menoth Mohan, Asif Hussain, Etienne Burdet, and Domenico Campolo. 2020. "Estimating Human Wrist Stiffness during a Tooling Task" Sensors 20, no. 11: 3260. https://doi.org/10.3390/s20113260
APA StylePhan, G. -H., Hansen, C., Tommasino, P., Budhota, A., Mohan, D. M., Hussain, A., Burdet, E., & Campolo, D. (2020). Estimating Human Wrist Stiffness during a Tooling Task. Sensors, 20(11), 3260. https://doi.org/10.3390/s20113260