GNSS Multipath Detection Using Continuous Time-Series C/N0



Abstract
:1. Introduction
2. Features of Measured C/N0 in Dense Urban Areas
2.1. Measured C/N0 in Dense Urban Areas
2.2. Estimation of Pseudo-Range Errors
2.3. Relationship Between Pseudo-Range Errors and C/N0
3. Proposed Strong Multipath Detection Using C/N0 Information
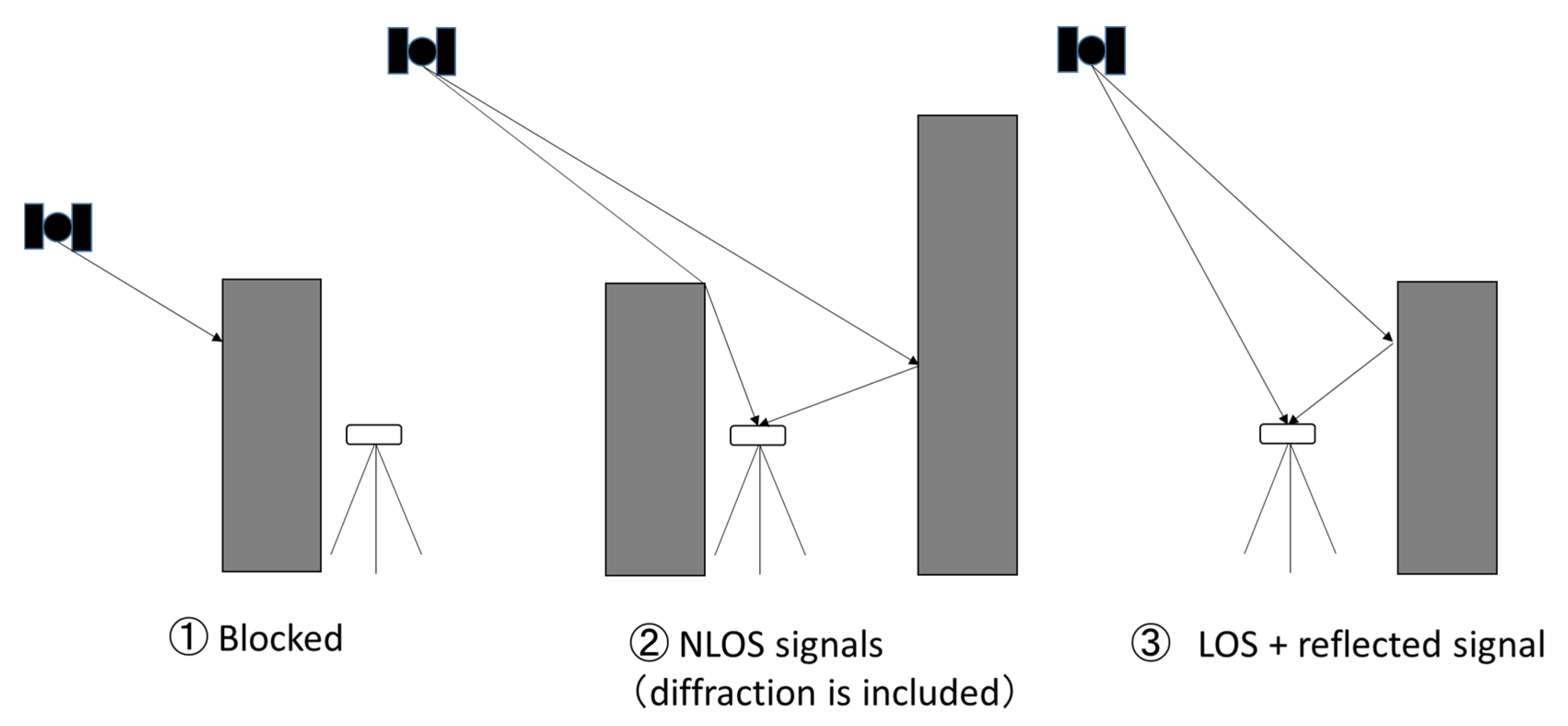
- The C/N0 of satellites affected by strong NLOS signals can easily reach 40 dB-Hz and above. They also fluctuate significantly from below 30 dB-Hz to over 40 dB-Hz. Furthermore, the large pseudo-range errors of these satellites continue for a long time even though large fluctuations can be observed.
- The C/N0 values of satellites that clearly receive LOS signals do not decrease below 30 dB-Hz, and relatively high C/N0 values of more than 40 dB-Hz are maintained. Moreover, they sometimes fluctuate owing to the reception of the reflected signal. However, these pseudo-range errors can be reduced using correlator-based multipath mitigation because they receive LOS signals. The pseudo-range errors are mostly less than 5 m.
3.1. Method to Determine the Threshold and Period
3.2. Flowchart of the Proposed Method
3.3. Other Test for the Generalization of the Data
4. Testing and Results
4.1. Test Results in the First Location
4.2. Test Results in The Second Location
4.3. Test Results in Third Location
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mongrédien, C.; Parkins, A.; Hide, C.; Ström, M.; Ammann, D. Multi-Band Multi-GNSS RTK for Mass-Market Applications. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 580–595. [Google Scholar]
- Softbank Corp. to Launch Positioning Service with Centimeter-Level Accuracy in Japan. Available online: https://www.softbank.jp/en/corp/set/data/news/press/sbkk/2019/20190603_01/pdf/20190603_01.pdf (accessed on 12 June 2020).
- Miya, M.; Fujita, S.; Sato, Y.; Ota, K.; Hirokawa, R.; Takiguchi, J. Centimeter Level Augmentation Service (CLAS) in Japanese Quasi-Zenith Satellite System, its User Interface, Detailed Design, and Plan. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 2864–2869. [Google Scholar]
- Higuchi, M.; Kubo, N. Achievement of Continuous Decimeter-Level Accuracy Using Low-Cost Single-Frequency Receivers in Urban Environments. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 1891–1913. [Google Scholar]
- Paul, D.G.; Mounir, A. Performance assessment of 3D-mapping–aided GNSS part 1: Algorithms, user equipment, and review. Navigation 2019, 66, 341–362. [Google Scholar]
- Suzuki, T.; Kubo, N. N-LOS GNSS Signal Detection Using Fish-Eye Camera for Vehicle Navigation in Urban Environments. In Proceedings of the ION GNSS + 2014, Tampa, FL, USA, 8–12 September 2014; pp. 1897–1906. [Google Scholar]
- Wang, Y.K.; Ma, H.X.; Zhu, L.H.; Tai, Y.P.; Li, X.Z. Orientation-selective elliptic optical vortex array. Appl. Phys. Lett. 2020, 116, 011101. [Google Scholar] [CrossRef]
- Hsu, L. GNSS multipath detection using a machine learning approach. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Kubo, N.; Suzuki, T. Performance Improvement of RTK-GNSS with IMU and Vehicle Speed Sensors. IEICE 2016, E-99A, 217–224. [Google Scholar] [CrossRef]
- Kubo, N.; Suzuki, T.; Yasuda, A.; Shibazaki, R. An Effective Method for Multipath Mitigation under Severe Multipath Environments. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 2187–2194. [Google Scholar]
- Tokura, H.; Kubo, N. Efficient Satellite Selection Method for Instantaneous RTK-GNSS in Challenging Environments. Trans. Jpn. Soc. Aeronaut. Space Sci. 2017, 60, 221–229. [Google Scholar] [CrossRef] [Green Version]
- Hsu, L.; Tokura, H.; Kubo, N.; Gu, Y.; Kamijo, S. Multiple Faulty GNSS Measurement Exclusion Based on Consistency Check in Urban Canyons. IEEE Sens. J. 2017, 17, 1909–1917. [Google Scholar] [CrossRef] [Green Version]
- Van Dierendonck, A.J.; Fenton, P.; Ford, T. Theory and Performance of Narrow Correlator Spacing in a GPS Receiver Navigation. Navigation 1993, 39, 265–283. [Google Scholar] [CrossRef]
- Garin, L.; Van Diggelen, F.; Rousseau, J.M. Strobe & Edge Correlator—Multipath Mitigation for Code. In Proceedings of the ION GPS 1996, Kansas City, MO, USA, 17–20 September 1996; pp. 657–664. [Google Scholar]
- Townsend, B.; Van Nee, D.J.; Fenton, P.; Van Dierenconck, K. Performance Evaluation of the Multipath Estimating Delay Lock Loop. Navigation 1995, 42, 503–514. [Google Scholar] [CrossRef]
- Rei, F.; Nobuaki, K. Prediction of Fixing of RTK-GNSS Positioning in Multipath Environment Using Radiowave Propagation Simulation. Inst. Position. Navigat. Timing Jpn. 2019, 10, 13–22. [Google Scholar]
- Kubo, N. Advantage of Velocity Measurements on Instantaneous RTK Positioning. GPS Solut. 2009, 13, 271–280. [Google Scholar] [CrossRef] [Green Version]
- Takasu, T.; Kubo, N.; Yasuda, A. Development, evaluation and application of RTKLIB: A program library for RTK-GPS. In Proceedings of the GPS/GNSS symposium, Tokyo, Japan, 20–22 November 2007; pp. 213–218. [Google Scholar]
- Groves, P.D.; Jiang, Z.; Rudi, M.; Strode, P. A Portfolio Approach to NLOS and Multipath Mitigation in Dense Urban Areas. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 3231–3247. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SV | Flag | Maximum Error (m) | 90th Percentile of Errors (m) | 10th Percentile of Errors (m) | Percentage of C/N0 < 30 (%) | Percentage of C/N0 > 30 and C/N0 < 40 (%) | Percentage of C/N0 > 40 (%) |
|---|---|---|---|---|---|---|---|
| G01 | LOS | 1.5 | 1.1 | 0.6 | 0 | 0 | 100.0 |
| G03 | NLOS | 233.9 | 150.5 | 65.0 | 16.4 | 74.2 | 4.1 |
| G07 | LOS | 26.9 | 12.4 | 4.7 | 1.6 | 30.6 | 67.8 |
| G08 | NLOS | 103.6 | 61.9 | 35.4 | 7.6 | 60.4 | 28.5 |
| G11 | LOS | 5.2 | 4.1 | 1.1 | 1.0 | 35.4 | 63.6 |
| G22 | NLOS | 155.3 | 99.6 | 56.5 | 2.3 | 31.2 | 64.1 |
| G27 | NLOS | 556.4 | 111.4 | 77.4 | 19.9 | 38.3 | 6.7 |
| G28 | NLOS | 339.6 | 73.8 | 11.4 | 37.7 | 19.7 | 0 |
| G30 | NLOS | 320.8 | 90.5 | 35.5 | 4.5 | 39.3 | 3.3 |
| J01 | NLOS | 279.0 | 175.5 | 116.6 | 31.0 | 53.3 | 0 |
| J02 | LOS | 5.7 | 4.2 | 0.9 | 0 | 12.1 | 87.9 |
| J03 | LOS | 0.1 | 0.1 | 0.1 | 0 | 0 | 100 |
| J07 | LOS | 4.2 | 3.4 | 1.8 | 0 | 100 | 0 |
| E01 | LOS | 7.9 | 5.6 | 0.7 | 0 | 4.1 | 95.9 |
| E13 | NLOS | 198.1 | 121.1 | 39.0 | 68.3 | 30.1 | 0 |
| E21 | NLOS | 210.7 | 115.2 | 47.5 | 13.3 | 79.0 | 6.9 |
| E26 | Partial | 27.7 | 6.0 | 1.4 | 3.7 | 35.3 | 61.0 |
| E31 | NLOS | 305.4 | 30.2 | 3.8 | 21.9 | 43.8 | 27.6 |
| E33 | NLOS | 127.8 | 79.4 | 18.6 | 62.7 | 36.0 | 0 |
| C07 | LOS | 3.8 | 2.7 | 0.7 | 0 | 0 | 100.0 |
| C08 | LOS | 4.9 | 3.5 | 0.6 | 0 | 17.7 | 82.3 |
| C10 | LOS | 11.8 | 4.1 | 0.5 | 4.2 | 38.5 | 43.7 |
| C11 | Partial | 26.5 | 3.9 | 0.4 | 14.3 | 34.4 | 48.4 |
| C13 | LOS | 13.5 | 11.3 | 5.5 | 2.4 | 31.6 | 66.0 |
| C25 | LOS | 6.6 | 4.8 | 0.7 | 0 | 1.1 | 98.9 |
| R02 | NLOS | 631.9 | 154.5 | 75.0 | 12.6 | 45.7 | 36.2 |
| R15 | LOS | 8.2 | 6.4 | 3.2 | 0 | 0.6 | 99.4 |
| R16 | Partial | 113.0 | 55.2 | 1.8 | 2.7 | 9.6 | 62.7 |
| R17 | LOS | 9.8 | 7.3 | 4.3 | 0.2 | 3.7 | 96.1 |
| R18 | Partial | 123.8 | 13.2 | 0.2 | 10.4 | 30.5 | 59.1 |
| R19 | NLOS | 454.4 | 242.6 | 62.5 | 45.4 | 14.0 | 0 |
| SV | 90th Percentile of All Errors (m) | Percentage of C/N0 > 40 (%) | Longest Period (s) | Second Longest Period (s) | Third Longest Period (s) |
|---|---|---|---|---|---|
| G03 | 150.5 | 4.1 | 79 | 67 | 59 |
| G08 | 61.9 | 28.5 | 89 | 64 | 63 |
| G22 | 99.6 | 64.1 | 164 | 140 | 134 |
| G27 | 111.4 | 6.7 | 149 | 127 | 86 |
| G28 | 73.8 | 0 | 12 | 7 | 5 |
| G30 | 90.5 | 3.3 | 108 | 13 | 13 |
| J01 | 175.5 | 0 | 117 | 102 | 81 |
| E13 | 121.1 | 0 | 85 | 63 | 54 |
| E21 | 115.2 | 6.9 | 137 | 103 | 96 |
| E31 | 30.2 | 27.6 | 17 | - | - |
| E33 | 79.4 | 0 | 74 | 12 | 10 |
| R02 | 154.5 | 36.2 | 163 | 130 | 109 |
| R16 | 55.2 | 62.7 | - | - | - |
| R19 | 242.6 | 0 | 42 | 40 | 31 |
| Sensor | Model Name |
|---|---|
| GNSS receiver | u-blox F9P (base/rover) |
| GNSS antenna (rover) | Standard patch antenna (ANN-MB-00-00) |
| GNSS antenna (base) | Trimble Zephyr 2 Geodetic |
| Item | Parameter |
|---|---|
| Mask angle | 15 degrees |
| Maximum HDOP | 10.0 |
| Minimum C/N0 for L1 band | 32 dB-Hz |
| Minimum C/N0 for L2 band | 32 dB-Hz |
| Pseudo-range measurements | Tracked |
| Carrier phase measurements | Tracked |
| Carrier phase measurements (only RTK-GNSS) | Tracked and half-cycle resolved |
| Threshold for residual (least-squares method) | 10.0 m |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kubo, N.; Kobayashi, K.; Furukawa, R. GNSS Multipath Detection Using Continuous Time-Series C/N0. Sensors 2020, 20, 4059. https://doi.org/10.3390/s20144059
Kubo N, Kobayashi K, Furukawa R. GNSS Multipath Detection Using Continuous Time-Series C/N0. Sensors. 2020; 20(14):4059. https://doi.org/10.3390/s20144059
Chicago/Turabian StyleKubo, Nobuaki, Kaito Kobayashi, and Rei Furukawa. 2020. "GNSS Multipath Detection Using Continuous Time-Series C/N0" Sensors 20, no. 14: 4059. https://doi.org/10.3390/s20144059
APA StyleKubo, N., Kobayashi, K., & Furukawa, R. (2020). GNSS Multipath Detection Using Continuous Time-Series C/N0. Sensors, 20(14), 4059. https://doi.org/10.3390/s20144059