1. Introduction
GNSS positioning, with centimeter precision, using precise phase observations requires the inclusion of some unknown integer values, the so-called ambiguities, in satellite observations. Double-difference observations using two observation points and two satellites are used in relative positioning. For such an observation system, certain unknown
-values must be determined. These are constant over time if the observations are continuous and have no data gaps. In addition, if two frequencies are used, e.g., L1-L5, ambiguity needs to be determined for each frequency, i.e.,
and
. The problem of determining integer ambiguities of phase measurements in GPS observations dates back to 1978 [
1,
2]. Ambiguities are different for each pair of satellites and for each frequency, which poses an extremely complex mathematical and physical problem. Many scientists have worked to find the best and the most effective solution to this problem since the development of GPS systems [
3]. In general, when using one or two frequencies, existing calculation methods can be divided into three groups:
The first group of methods is based on linear combinations;
The second group of methods uses the original search functions in 3D coordinate area;
The third group is the most popular and employs the least-squares method.
The greatest step in ambiguity resolution was taken by Hatch–Melbourne–Wubbena [
4,
5,
6] linear combinations, especially by using the so-called wide lane and narrow lane combinations. However, the first approach of ambiguity resolution was based on the use of mathematical functions [
7]. Initially, the use of mathematical functions made it possible to achieve centimeter accuracy for vectors with a length of up to 10 km during static sessions lasting 2–3 h [
8]. Later studies on mathematical functions improved efficiency of this approach [
9,
10,
11]. The second method only uses the fractional part of the carrier phase measurements to minimize the objective function with the use of the least-squares estimation [
12]. The third group is based on the integer least-squares estimation [
13,
14,
15]. Methods of the first and the third group can effectively complement each other, especially in iterative computational strategies based on triple frequencies [
16,
17,
18], in short baseline single-epoch solutions [
19,
20], and in longer baseline solutions [
21].
Most ambiguity solutions start with the determination of estimated coordinates in the global XYZ system in order to determine the approximate ambiguity values, followed by a second and a third stage: estimation and validation. The second stage (estimation) is specific to various methods, as it indicates the most probable sets of ambiguities and is different in each of the ambiguity determination methods. The developed precise and fast method of ambiguity resolution (PREFMAR) uses mathematical functions to choose sets of ambiguities for GNSS observations transmitted on at least two frequencies. Therefore, each frequency combination has its own special properties and different efficiency in the reliable determination of unknown
-values. This research presents a method for determining the most probable ambiguities for GNSS signals transmitted on two frequencies: L1/E1 = 1575.42 MHz and L5/E5a = 1176.45 MHz. Signals of such frequencies are transmitted by GPS satellites, designated as L1 and L5, and GALILEO satellites, designated as E1 and E5a. Therefore, the L1/E1-L5/E5a frequency combination allows the integration of GPS and GALILEO for precise and reliable GNSS positioning [
22,
23,
24].The first part of this contribution presents the mathematical background of the new method of ambiguity estimation based on new functions:
and
. The second part of the work provides a detailed numerical example of ambiguity estimation (
) based on real double-difference L1-L5 GPS data.
2. Observation of Double-Difference Equations for GPS Observations on L1 and L5 Frequencies and Their Intercorrelation
For GPS observations transmitted on two frequencies (L1 and L5), we can write the following observation equations for double-difference phase observations (
) and code observations (
) for a given measurement epoch (
):
where
are observations of double-difference (DD) phase measurements for L1 and L5 frequencies (in cycles),
are observations of DD in code measurements (m),
,
are errors of phase DD observations,
0.190293672798365 (m), and
(m).
There are three unknowns in the above equations: the value of
and the sought integral values
and
. By separately examining the frequencies L1 and L5 (1-2) and (3-4), we can calculate the ambiguities
and
for a single measurement epoch, which are known in the literature as the so-called geometry-free (GF) integer solutions [
25]:
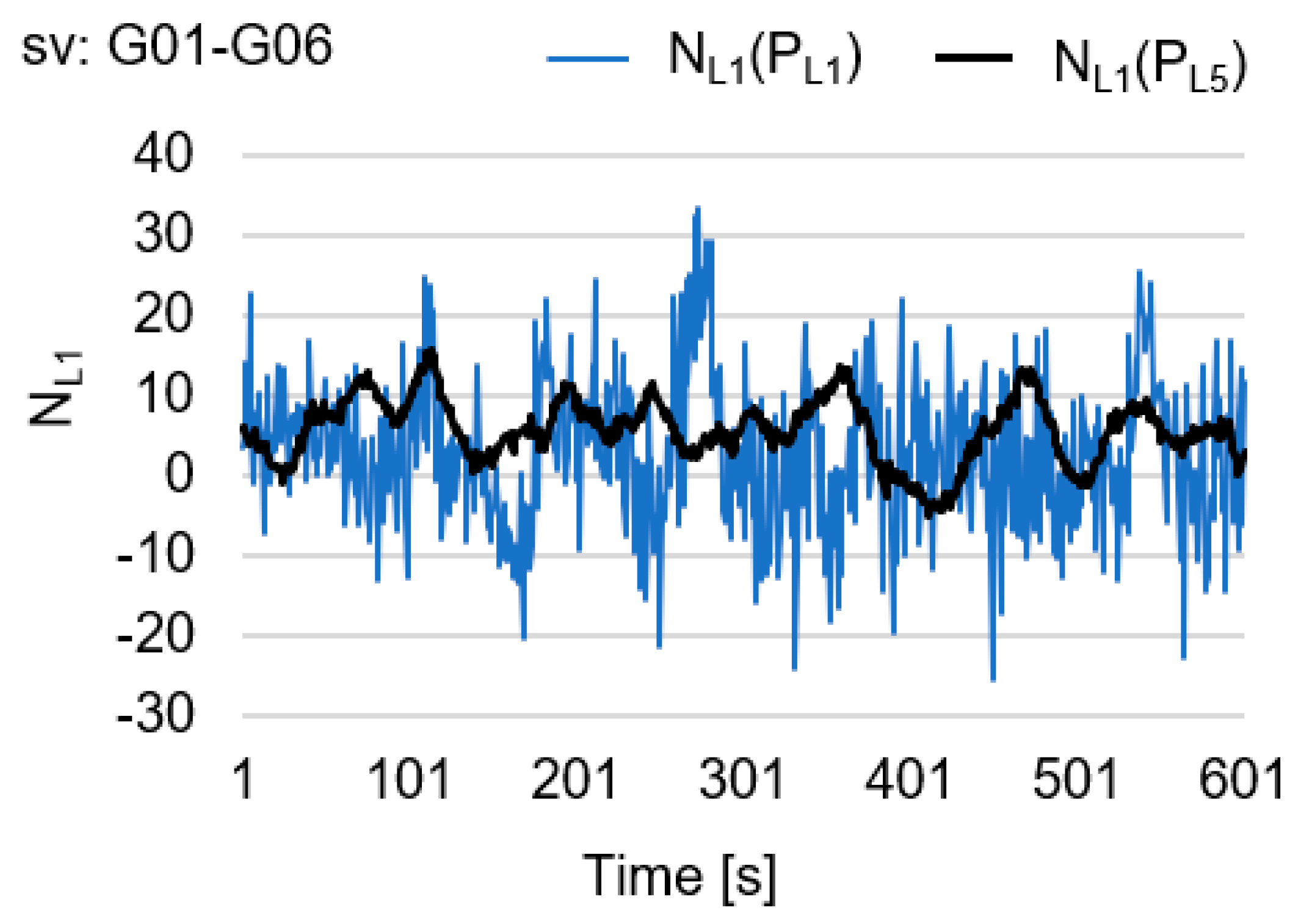
Due to the transmission of signals at two frequencies at the same time, code and phase observations are strongly correlated. Similarly, as in Equation (6), Equation (5) may only be dependent on code measurements at frequency L5, as follows:
Instead of value
,
could be used, but practice shows that code observations
are much more accurate than
observations (see
Figure 1). Code observations
are also much more accurate than
in smartphones [
26]. The values of GF ambiguity for
using code
(based on Equation (5)) and
(based on Equation (7)) have been presented in
Figure 1. The time series of single-epoch DD geometry-free float solutions presented in
Figure 1 have been calculated using real GPS observations, made with Javad GNSS receivers, for a 10-min session with a measurement interval of 1 s.
.
GPS observations, expressed in formulas (6) and (7), are strongly correlated as they depend on the same code observation [
27], e.g., observation
. According to Teunissen’s research, strong correlation can also be obtained when the code
is replaced by a code
or by
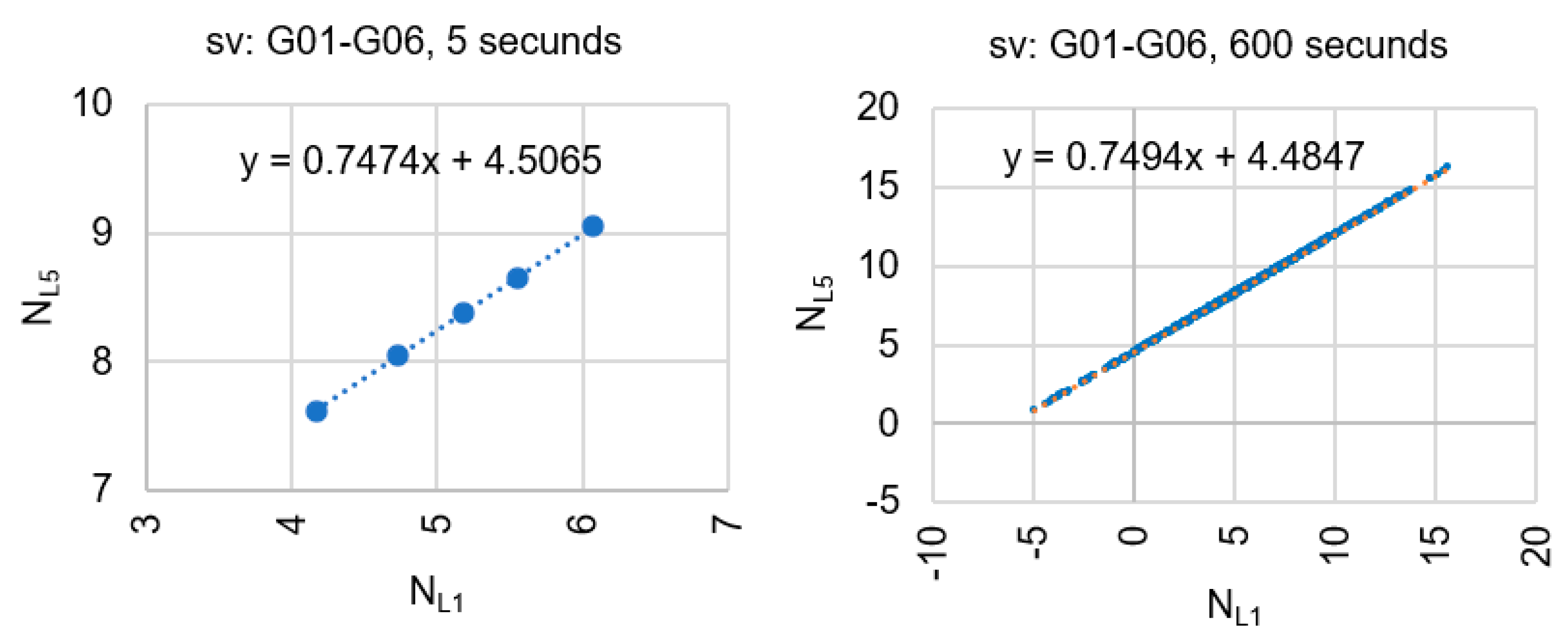
. An example of correlated ambiguities for a pair of satellites (G01-G06) and observation
is shown in
Figure 2, both for sessions with a length of five measurement epochs and for sessions of 600 observation epochs.
Figure 2 shows correlated ambiguities
and
, using only the
code. Please note that the float ambiguities are arranged precisely along a straight line, both for 5-s and 10-min sessions.
3. Ambiguity Regression Line Equations
If the correlated float ambiguities are arranged along a straight line, the regression equation for the ambiguity
in relation to ambiguity
in the ambiguity system
may be written as
or
where
As ambiguities in the form of real numbers (
) are located along a straight line expressed by (9), the value of
can be calculated based on approximate float values (
):
Thus, taking (11) into account, Equation (8) can be written as follows:
If both integer
) and float
) ambiguities lie on the same straight line, the
can also be written as
Thus, Equations (12) and (13) represent regression line equations for both real ambiguities (13) and the integer ambiguities (12) and are dependent on approximate values of and .
4. Ambiguity Functions for L1-L5 GPS Data
Let us, therefore, define a certain function,
, as follows:
Equation (14), with Equation (13) taken into account, for the system
can be written as follows:
where
and
represent a float solution or are calculated as follows:
Similarly, for system
and function
we obtain
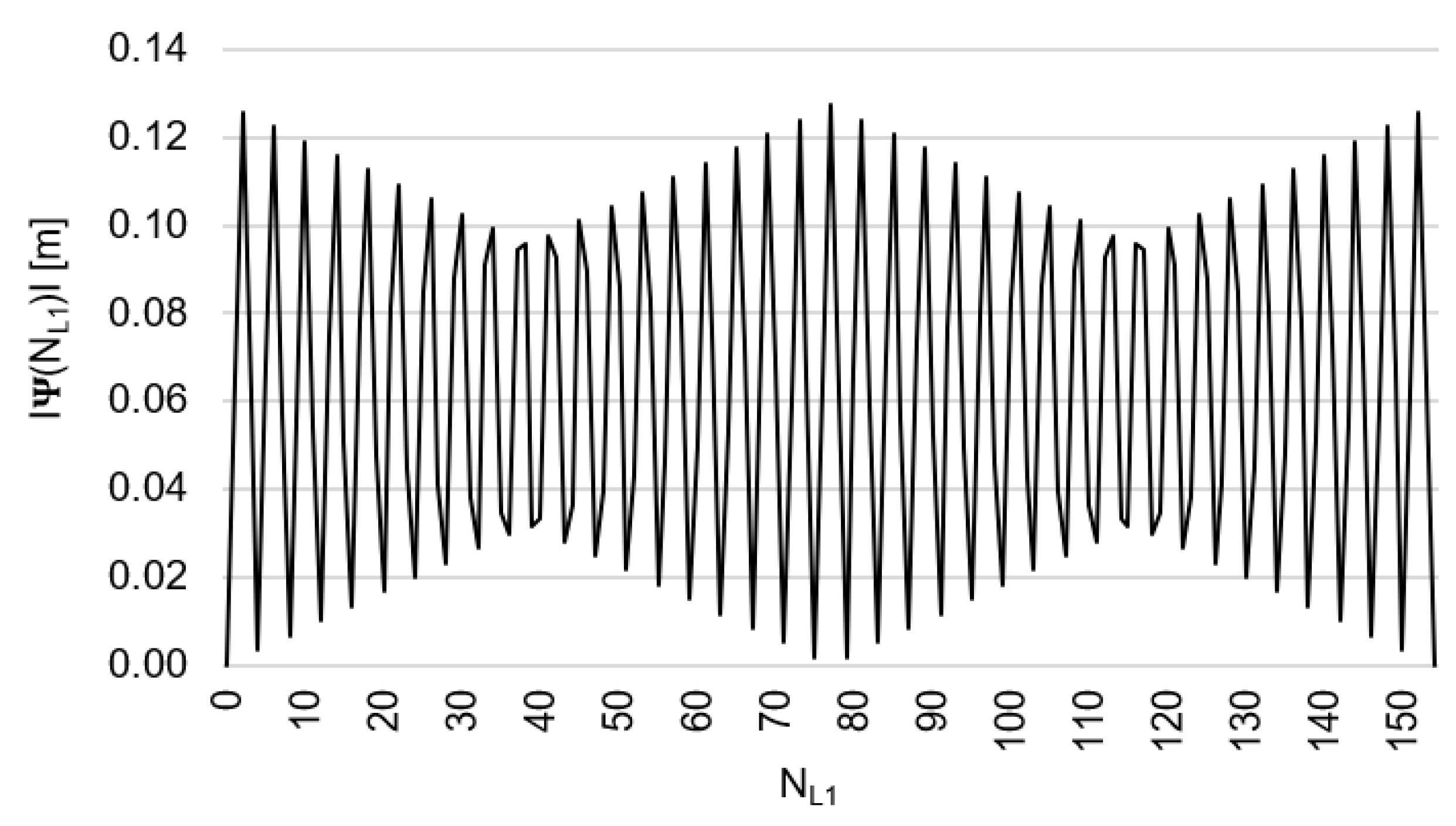
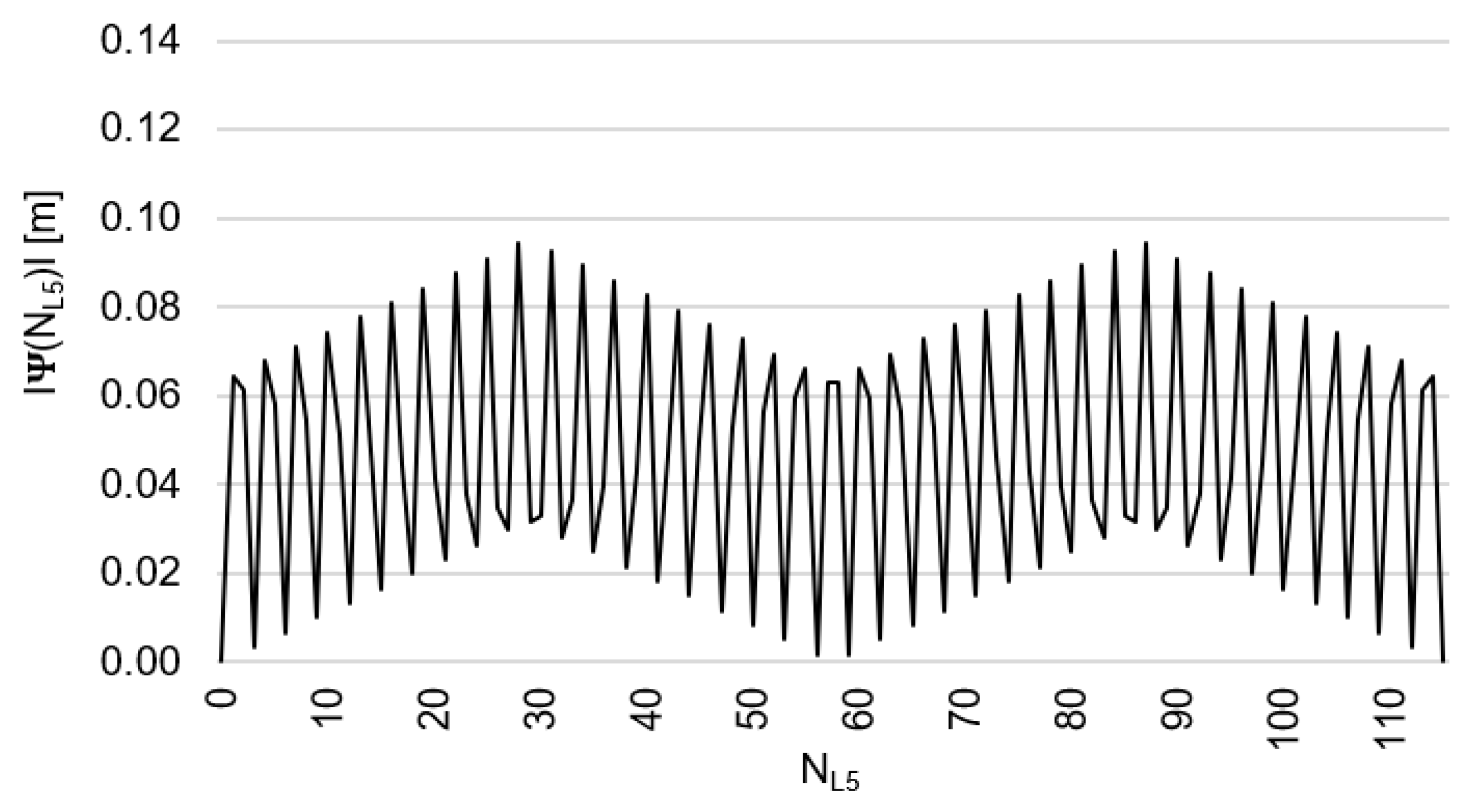
Behaviors of the functions
and
have been presented in
Figure 3 and
Figure 4, where their minima, and thus their periodic character (repeatability), can be clearly seen. The horizontal axes represent integer candidates, but the vertical ones represent values of the ambiguity functions.
Based on an analysis of values of the function
, in the (
0.127;
0.126 m), interval, it can be observed that the values of the function
for
and
frequencies of GPS observations repeat precisely every 154
cycles. Values of the function
are in the interval (
0.094;
0.094 m) and repeat precisely every 115
cycles. The functions
and
have the same wavelength (
29.3052256109482 m) and frequency (
10.23 MHz) and are equivalent in the process of determining ambiguities
and
, for values
where
represents both relative errors in phase observations, i.e.,
and the value
meets the relation expressed by Equation (14), i.e.,
Selection of the most likely sets of ambiguities () in the PREFMAR depends on approximate values of the float solution () and relative error values in L1 and L2 carrier phase observations.
5. Ambiguity Search Space in the PREFMAR
Generally, we can assume that the sought integer ambiguities
and
lie exactly on the regression line, which additionally needs to pass through an unknown and sought point with coordinates
and
. Unfortunately, this is only when (I)
and
and therefore when the errors in phase observations are equal to zero, or (II) when the relative errors in phase observations are equal to zero, i.e.,
. The first situation corresponds to ideal phase observations, whereas the second one is in the situation when
. Detailed analysis of the functions
and
shows that the minima of the functions
and
indicate the sought ambiguity values
and
), but only if the errors in phase observations are equal to or close to zero. However, the question that remains is how big the errors in DD phase observations can be for the ambiguities to be determined by the minima of these functions. In the case of phase measurements L1-L5, this depends on the smallest value of the function
or
, and these are the values
and
, which we calculate as
The formula (22), therefore, defines the smallest unit of function in the system and the smallest unit of function in the system. Thus, if the relative errors in DD phase observations are less than half of this unit (22), i.e., less than 0.0008 m, then the minima of the functions and determine, on the horizontal axis, the sought ambiguities, with using the minimum of the function and using the minimum of the function. In both cases, approximate values and must be at a distance of less than 14.653 m from the true values sought ( and ).
If, however, the absolute values or are different from zero and larger than 0.0008 m, then ambiguity values will be located at different points than the minima of the and functions, and their selection will strongly depend on the real values and on the approximate and values.
When analyzing the graph of the function in the system and the graph of the function in the system , we should start the search for the first pair of ambiguities [, ] in the area of errors of code measurements below float [, ], i.e., and for relative errors of phase observations ; we perform the search for the second pair [, ] in the area , i.e., ; while the third pair [, ] of ambiguities must be at a distance of from the value and .
Let us, therefore, assume that the values of the function
lie within the range ±32 mm, then the function
behaves as shown in
Figure 5. Similarly, for the function
, we assume a range of values of ±32 mm (
Figure 6). Please note that for relative errors in DD phase observations with values up to
3 cm, the ambiguity
changes exactly by four cycles, whereas ambiguity
changes by three cycles. For comparison, the search areas for
and
which lie within ±62 mm have been presented in
Figure 7 and
Figure 8.
For relative errors of carrier phases (20) in the range
, these will be the following proposals for
(
Figure 5) and for
(
Figure 6):
Figure 7 and
Figure 8 show a template of possible ambiguities for relative errors in DD phase observations up to
62 mm, which seems to be sufficient from a practical point of view even for baselines of several kilometers or much more and for noisy GPS/GALILEO data in mobile phones.
6. Calculation Scheme for N Measurement Epochs Using the PREFMAR
For continuous GNSS observations, and using more than one measurement epoch, general formulas for the PREFMAR are used, which can be summarized in the following main points:
Calculation of correlated approximate values of and .
Determination of float value based on the global solution
and
, or using only DD observations for any pair of satellites (for n epochs), i.e.,
Regression line estimation.
Determination of search functions
(m) or
(m).
Selection of the most likely sets of ambiguities, depending on approximate values (,) and using function or function .
For short baselines, and assuming that
, the four most likely sets of ambiguities (
) will be at a distance of up to 1.55 m from the float value and will be selected as follows:
However, if we assume that the relative errors , then solutions I and II remain the same as for , whereas solutions III and IV are at a distance of 3 and 4 from the float value, respectively. Limiting the search range to 4 requires an accuracy of the float position of about 0.76 m if the search range is set for . However, given the number of satellites currently available, obtaining an accuracy of the float solution better than 0.76 m should not be a problem, which allows a quick indication of the most likely ambiguities for validation, even for GNSS measurements under difficult observational conditions or for mobile phones. However, based on preliminary tests, for high-quality GNSS receivers, the search area of ambiguity resolution and for relative errors should be sufficient for short baseline RTK positioning.
7. Numerical Example Using the PREFMAR and Float Solution
The formulas presented for the developed method were applied to real GPS data, for a very short baseline, based on DD observations for the G01–G06 satellite pair, using five observation epochs. The DD observations for these satellites are shown in
Table 1.
Sets of the most probable ambiguities (
,
) can be determined both with the use of function
and function
. Let us thus present the necessary calculations in the form of
Table 2 for the function
and using 5 DD observations for which the float values are respectively equal to
and
. Then, for subsequent integer values
, located around the float solution
, within the range of, e.g.,
8
cycles (i.e., at a distance of 1.5 m) from approximate values of
5.141, we calculate elements of the column
using the formula
and the values of the
function are calculated with the formula
Similarly, for the function
, the calculations are shown in
Table 3. The values of the function
are calculated from the following formula:
Identical sets of the most probable ambiguities have been obtained based on
Table 2 and
Table 3, which proves the reliability of the mathematical functions
and
used in the PREFMAR. The lowest values of the search functions were obtained for [
; the second proposal was [
, and the third proposal was [
. Similar results are obtained using the data from
Table 1, for any of the individual DD epochs. The information contained in
Table 2 and
Table 3 can also be presented in graphical form, as shown in
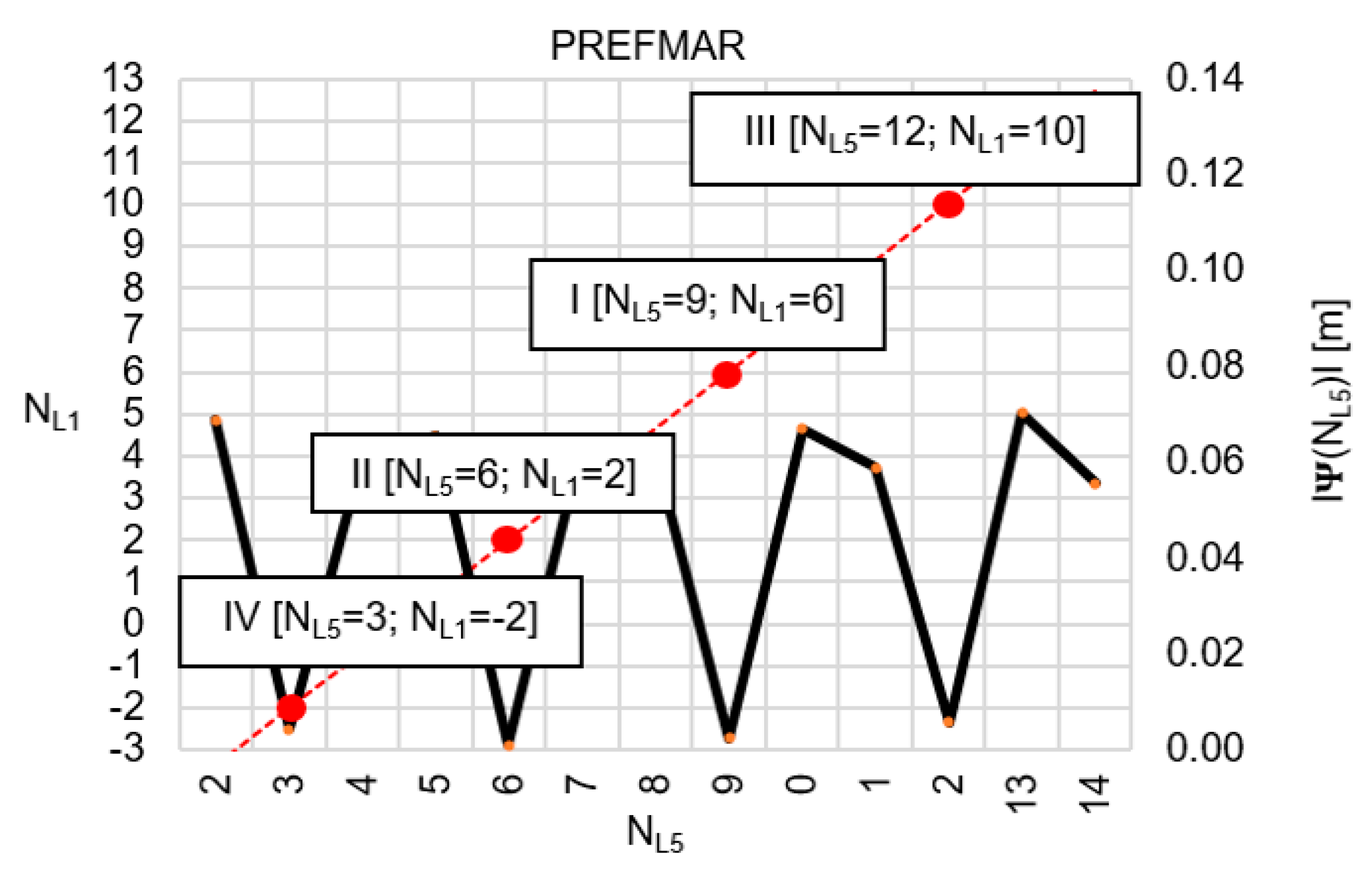
Figure 9 and
Figure 10.
However, as already mentioned before, taking into account the accuracy of the code measurements, the most probable pair of ambiguities must be selected in a distance from a float solution below (i.e., ); the search for the second pair is performed in the area from float solution (i.e., ), while the third pair of ambiguities must be at a distance (i.e., ). However, for the relative errors up to ±62 mm, the first four most probable pair of ambiguities will be as follows: ], ], ], and ].
8. Discussion
Generally, the search area in the PREFMAR is represented by a parallelogram. The orientation of this parallelogram in a given system of ambiguities is only dependent on the frequency of the GNSS signals transmitted. For system
, the short sides of this parallelogram are parallel to the vertical lines of the system
, i.e., to the
axis (
Figure 9). The longer side of this parallelogram is slanted with respect to the
axis under an angle of
o, and the geometrical center of the search area is located at point
,
Similarly, for the system
(
Figure 10),
o.
Please note that the presented functions fulfil the relation
because the values of the functions represent relative errors of phase observations between L1-L5, which can be additionally written in a simplified manner:
The formulas presented above also allow indicating integer ambiguities by substituting appropriate sets of ambiguities
and
, near the float ambiguity, e.g., for the case presented above using 5 DD epochs, we have
42.689 and
36.388 thus for [
; based on formulas (36) and (37) we obtain:
which is equivalent to the values of the functions
and
obtained based on formulas (16) and (19) and presented in
Table 2 and
Table 3, respectively.
Presented equations of ambiguity functions can be used for different double or triple frequencies; however, they have specific properties in every case. Therefore, we are going to present the most popular combinations of GNSS frequencies in the near future to show the power of the PREFMAR.
It should be emphasized that the PREFMAR gives results based on GNSS measurements from only two available GNSS satellites (see
Section 7); therefore, we can use this method effectively in challenging observational satellite conditions.
Furthermore, to obtain the most accurate float solutions, we can effectively use the Kalman filter in differential [
28] or relative code GNSS positioning.
9. Summary and Conclusions
This research presents a precise and fast method of ambiguity resolution (PREFMAR) for indicating the most probable ambiguities for GNSS observations transmitted on two frequencies, i.e., L1/E1 = 1575.42 MHz and L5/E5a = 1176.45 MHz. Signals with such frequencies are transmitted by satellites of the American GPS system and the European GALILEO system. Therefore, the combination of these frequencies allows the precise integration of the various GNSS positioning systems. The described method is used to determine ambiguities using only one observation epoch immediately. This PREFMAR is intended for both short and long baselines. Its efficiency mostly depends on the values of relative errors in DD phase observations and on the precision of code measurements. Ambiguity is chosen based on mathematical functions or , using a correlation between the value of a precisely defined ambiguity and dependent only on the frequency of satellite signals. The PREFMAR allows the ambiguities for single measurement epochs to be determined without using the VC matrix from the float solution and also allows the most probable ambiguities to be indicated even for individual DD observations. The presented mathematical functions can also be used for precise and immediate re-initialization of the ambiguities. Additionally, the contribution presents interpretations of the derived functions and in relation to the relative errors in phase observations. As a result, a simplified calculation method is included for values of the functions , which are equivalent to the mathematically detailed versions, but only in the range for function and in the range for function .












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}