Chimney Detection Based on Faster R-CNN and Spatial Analysis Methods in High Resolution Remote Sensing Images


Abstract
:1. Introduction
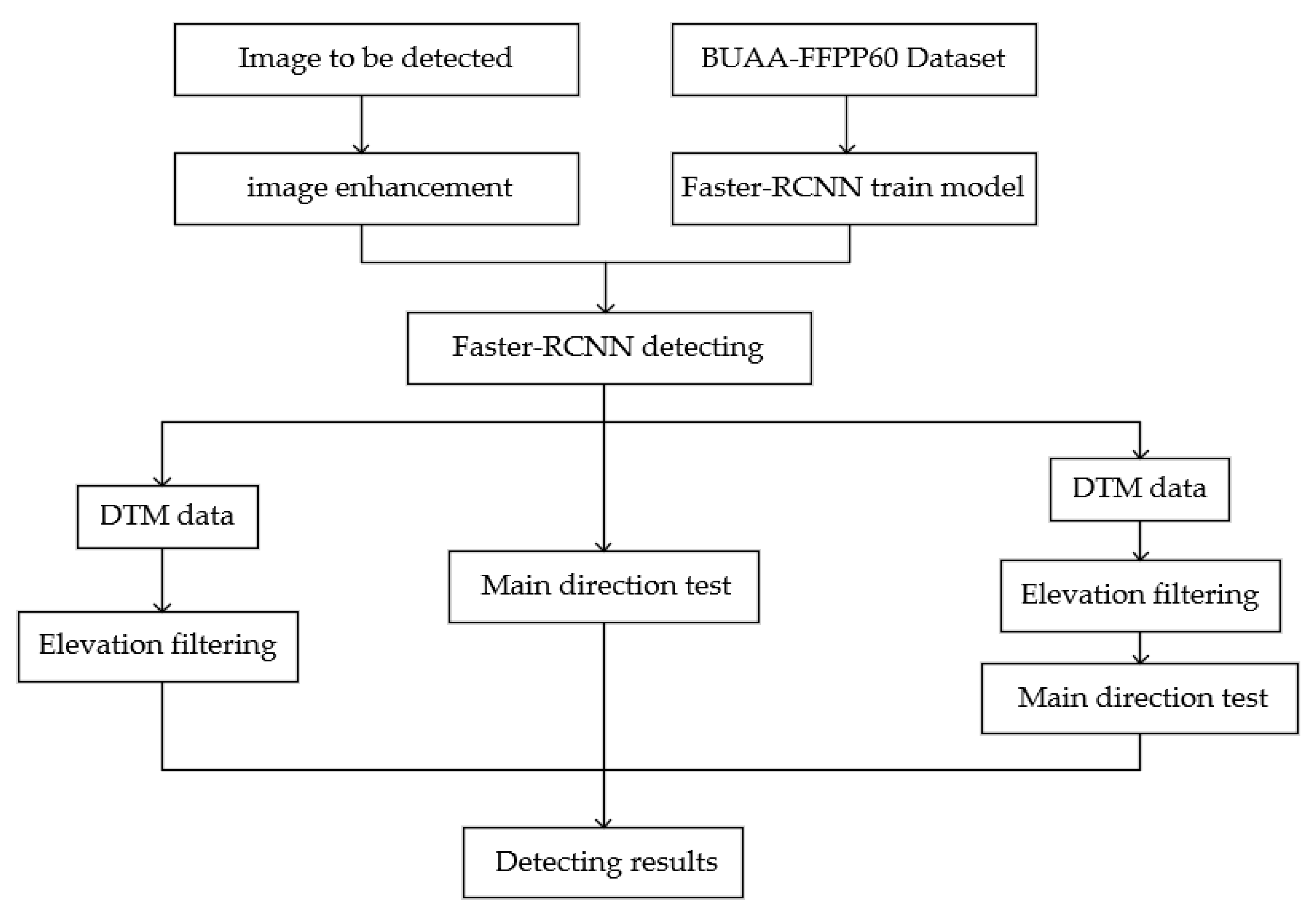
2. Methodology
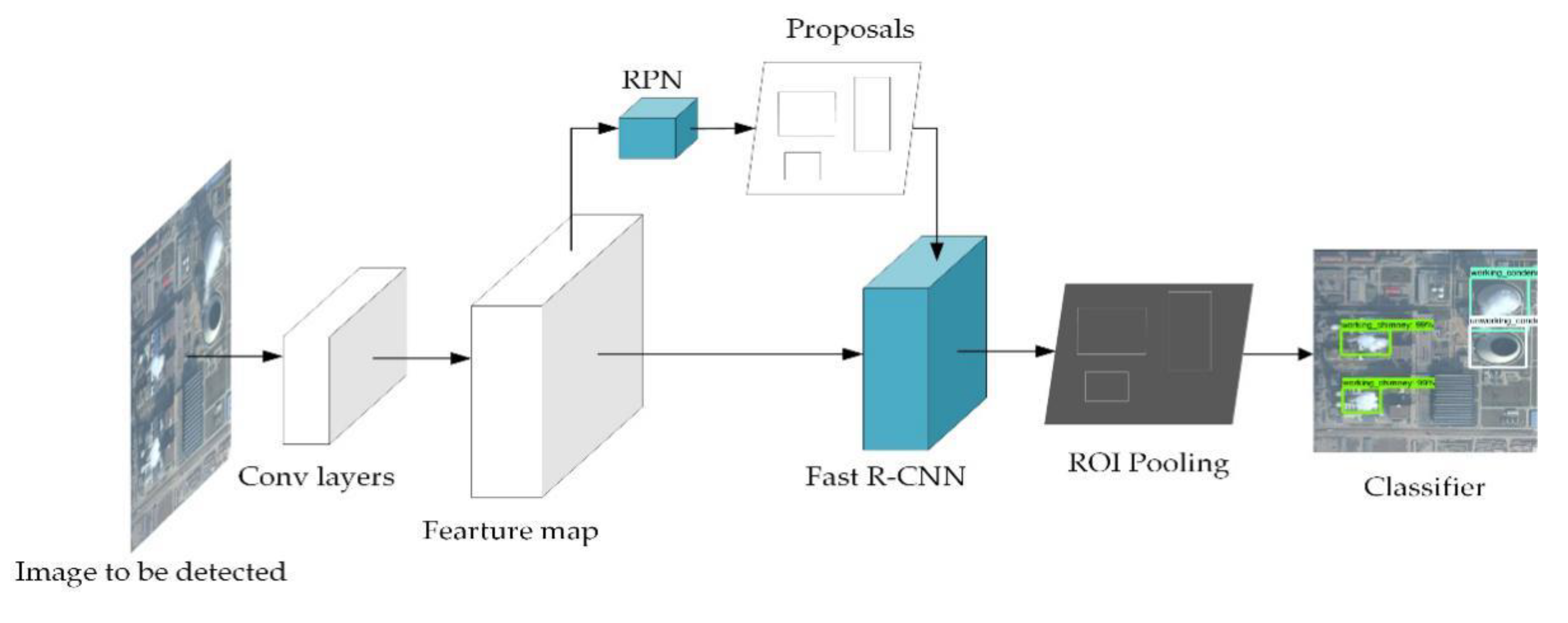
2.1. Faster R-CNN for Target Detection
2.2. The Elevation Filtering Using Local DTM
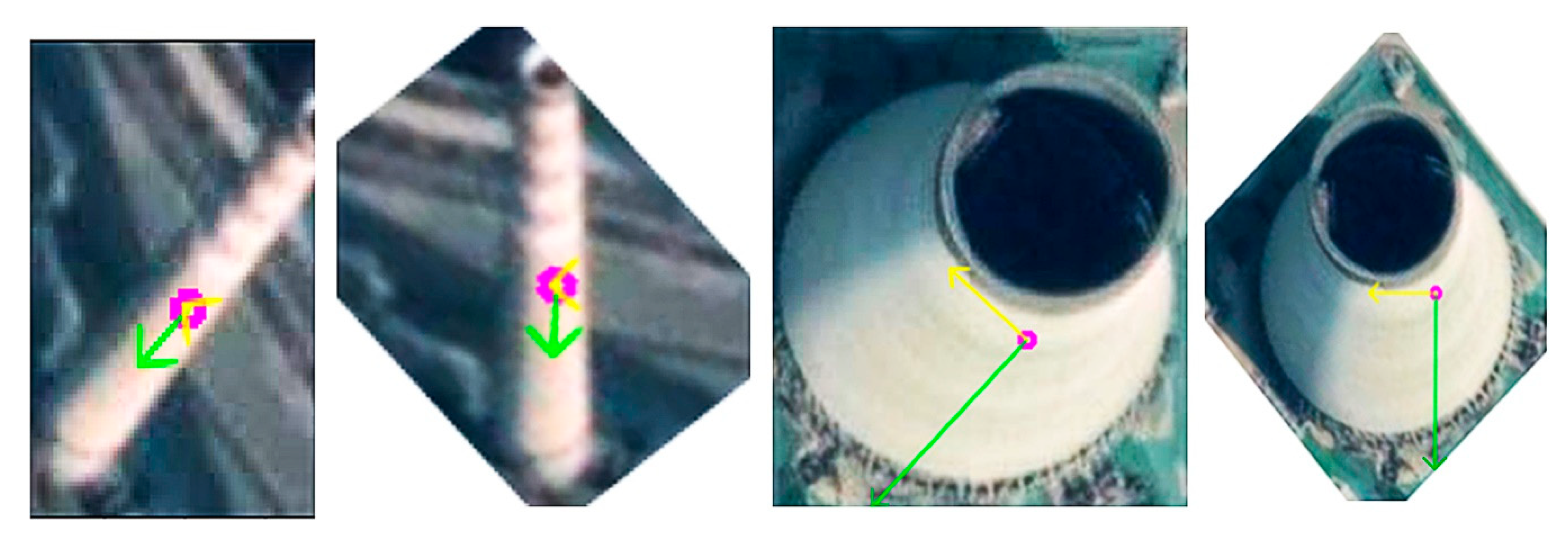
2.3. Main Direction Test
- (1)
- Gaussian filtering the image slice to remove noise interference;
- (2)
- converting the image slice into a grayscale image;
- (3)
- binarizing and extracting the position coordinates of non-zero pixels to construct a position matrix, and then calculating its covariance matrix;
- (4)
- calculating the eigenvector corresponding to the max eigenvalue of covariance matrix;
- (5)
- calculating the main direction angle of each slice according to the eigenvector.
3. Results
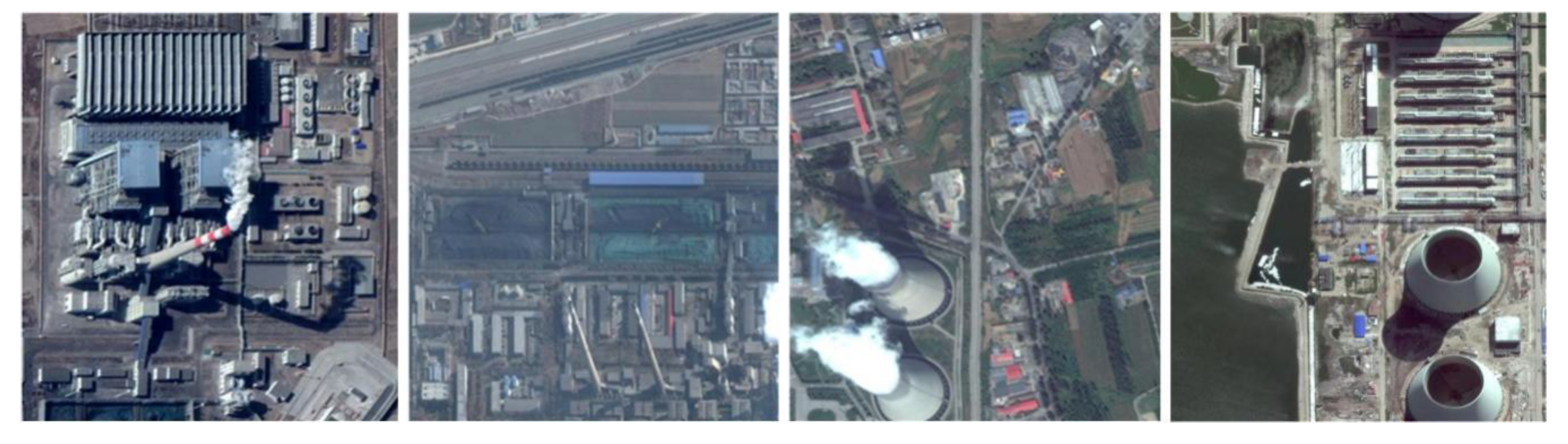
3.1. Dataset, Experimental Area, and Data
3.2. Experimental Results and Analysis
3.2.1. Accuracy of Faster R-CNN Trained Model
3.2.2. The Results from Faster R-CNN
3.2.3. The Results from Faster R-CNN, Elevation Filtering, and Main Direction Test
3.2.4. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ojala, T.; Pietikainen, M.; Maenpaa, T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Moranduzzo, T.; Melgani, F. A SIFT-SVM method for detecting cars in UAV images. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 6868–6871. [Google Scholar]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar] [CrossRef] [Green Version]
- Cheng, G.; Han, J. A survey on object detection in optical remote sensing images. ISPRS J. Photogramm. Remote Sens. 2016, 117, 11–28. [Google Scholar] [CrossRef] [Green Version]
- Sermanet, P.; Chintala, S.; LeCun, Y. Convolutional neural networks applied to house numbers digit classification. In Proceedings of the 21st International Conference on Pattern Recognition (ICPR2012), Tsukuba, Japan, 11–15 November 2012; pp. 3288–3291. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, Quebec, Canada, 7–12 December 2015; pp. 91–99. [Google Scholar]
- Wu, H.; Zhang, H.; Zhang, J.; Xu, F. Fast aircraft detection in satellite images based on convolutional neural networks. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 4210–4214. [Google Scholar]
- Zhang, F.; Du, B.; Zhang, L.; Xu, M. Weakly Supervised Learning Based on Coupled Convolutional Neural Networks for Aircraft Detection. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 5553–5563. [Google Scholar] [CrossRef]
- Wang, W.; Nie, T.; Fu, T.; Ren, J.; Jin, L. A novel method of aircraft detection based on high-resolution panchromatic optical remote sensing images. Sensors 2017, 17, 1047. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zou, Z.; Shi, Z. Ship Detection in Spaceborne Optical Image With SVD Networks. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 5832–5845. [Google Scholar] [CrossRef]
- Yao, Y.; Jiang, Z.; Zhang, H.; Zhao, D.; Cai, B. Ship detection in optical remote sensing images based on deep convolutional neural networks. J. Appl. Remote. Sens. 2017, 11, 042611. [Google Scholar] [CrossRef]
- Yang, X.; Sun, H.; Fu, K.; Yang, J.; Sun, X.; Yan, M.; Guo, Z. Automatic ship detection in remote sensing images from google earth of complex scenes based on multiscale rotation dense feature pyramid networks. Remote Sens. 2018, 10, 132. [Google Scholar] [CrossRef] [Green Version]
- Zhu, C.; Liu, B.; Zhou, Y.; Yu, Q.; Liu, X.; Yu, W. Framework design and implementation for oil tank detection in optical satellite imagery. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 6016–6019. [Google Scholar]
- Zhang, L.; Shi, Z.; Wu, J. A Hierarchical Oil Tank Detector With Deep Surrounding Features for High-Resolution Optical Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2015, 8, 4895–4909. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, D.; Shi, Z.; Jiang, Z. Unsupervised Saliency Model with Color Markov Chain for Oil Tank Detection. Remote Sens. 2019, 11, 1089. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Jiang, Z.; Zhang, H.; Cai, B.; Meng, G.; Zuo, D. Chimney and condensing tower detection based on faster R-CNN in high resolution remote sensing images. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 3329–3332. [Google Scholar]
- Zhang, H.; Deng, Q. Deep Learning Based Fossil-Fuel Power Plant Monitoring in High Resolution Remote Sensing Images: A Comparative Study. Remote Sens. 2019, 11, 1117. [Google Scholar] [CrossRef] [Green Version]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. In Proceedings of the Advances in Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 379–387. [Google Scholar]
- Dai, J.; Qi, H.; Xiong, Y.; Li, Y.; Zhang, G.; Hu, H.; Wei, Y. Deformable convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 764–773. [Google Scholar]
- Fu, C.-Y.; Liu, W.; Ranga, A.; Tyagi, A.; Berg, A.C. Dssd: Deconvolutional single shot detector. arXiv 2017, arXiv:1701.06659. [Google Scholar]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Deng, Q.; Zhang, H.; Bruzzone, L.; Bovolo, F.; Benediktsson, J.A. Chimney and condensing tower detection based on FPN in high-resolution remote sensing images. In Proceedings of the Image and Signal Processing for Remote Sensing XXV, Strasbourg, France, 9–11 September 2019. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Ministry of Environmental Protection of the People’s Republic of China. GB/T 13271-2014 Emission Standard of Air Pollutants for Boiler; Environmental Science Press: Beijing, China, 2014.
- Tangshan Environment Report; Tangshan Ecological Environment Bureau: Tangshan, China, 2011.
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M. Tensorflow: Large-scale machine learning on heterogeneous distributed systems. arXiv 2016, arXiv:1603.04467. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold | Chimneys | Condensing Tower | False Positive Targets |
|---|---|---|---|
| 0 | 79 | 9 | 178 |
| 16 | 79 | 9 | 81 |
| 18 | 77 | 9 | 63 |
| 20 | 76 | 9 | 25 |
| 22 | 70 | 9 | 21 |
| 24 | 62 | 8 | 18 |
| Working Chimneys | Non-Working Chimneys | Working Condensing Towers | Non-Working Condensing Towers | |
|---|---|---|---|---|
| working chimneys | 17 | 1 | 0 | 0 |
| non-working chimneys | 0 | 62 | 0 | 0 |
| working condensing towers | 0 | 0 | 5 | 0 |
| non-working condensing towers | 0 | 0 | 0 | 4 |
| roads | 4 | 41 | 0 | 0 |
| architectures | 19 | 40 | 5 | 0 |
| tanks | 0 | 0 | 8 | 7 |
| lakes | 0 | 0 | 3 | 31 |
| other objects | 2 | 5 | 7 | 6 |
| false detection rate | 0.5952 | 0.5810 | 0.8214 | 0.9166 |
| Working Chimneys | Non-Working Chimneys | Working Condensing Towers | Non-Working Condensing Towers | |
|---|---|---|---|---|
| Working chimneys | 17 | 1 | 0 | 0 |
| non-working chimneys | 0 | 59 | 0 | 0 |
| working condensing towers | 0 | 0 | 5 | 0 |
| non-working condensing towers | 0 | 0 | 0 | 4 |
| road | 0 | 0 | 0 | 0 |
| architecture | 1 | 3 | 0 | 0 |
| tank | 0 | 0 | 1 | 1 |
| lake | 0 | 0 | 0 | 0 |
| other objects | 0 | 1 | 0 | 0 |
| false detection rate | 0.0555 | 0.0634 | 0.1667 | 0.2 |
| NO. | Faster R-CNN Detection | Combination of Faster R-CNN and Elevation Filtering Detection | Combination of Faster R-CNN and Main Direction Detection | Combination of Faster R-CNN and Elevation Filtering and Main Direction Detection |
|---|---|---|---|---|
| 1 |  |  |  |  |
| 2 |  |  |  |  |
| 3 |  |  |  |  |
| 4 |  |  |  |  |
| 5 |  |  |  |  |
| Target Type | Working Chimneys | Non-Working Chimneys | Working Condensing Towers | Non-Working Condensing Towers |
|---|---|---|---|---|
| N | 22 | 77 | 5 | 4 |
| TP | 17 | 62/59 * | 5 | 4 |
| FP | 25 | 86 | 23 | 44 |
| FN | 5 | 18 | 0 | 0 |
| Recall | 0.7727 | 0.7662 | 1 | 1 |
| Precision | 0.4047 | 0.4048 | 0.2173 | 0.0833 |
| Final Precision | 0.9444 | 0.9365 | 0.833 | 0.8 |
| Final Quality | 0.7391 | 0.7108 | 0.8333 | 0.8 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, C.; Li, G.; Ding, Y.; Yan, F.; Bai, L. Chimney Detection Based on Faster R-CNN and Spatial Analysis Methods in High Resolution Remote Sensing Images. Sensors 2020, 20, 4353. https://doi.org/10.3390/s20164353
Han C, Li G, Ding Y, Yan F, Bai L. Chimney Detection Based on Faster R-CNN and Spatial Analysis Methods in High Resolution Remote Sensing Images. Sensors. 2020; 20(16):4353. https://doi.org/10.3390/s20164353
Chicago/Turabian StyleHan, Chunming, Guangfu Li, Yixing Ding, Fuli Yan, and Linyan Bai. 2020. "Chimney Detection Based on Faster R-CNN and Spatial Analysis Methods in High Resolution Remote Sensing Images" Sensors 20, no. 16: 4353. https://doi.org/10.3390/s20164353
APA StyleHan, C., Li, G., Ding, Y., Yan, F., & Bai, L. (2020). Chimney Detection Based on Faster R-CNN and Spatial Analysis Methods in High Resolution Remote Sensing Images. Sensors, 20(16), 4353. https://doi.org/10.3390/s20164353