Extended Target Marginal Distribution Poisson Multi-Bernoulli Mixture Filter

Abstract
:1. Introduction
2. Background
2.1. Bayesian Model
2.2. PPP Model and Multi-Bernoulli (MB) Process Model
2.3. The Motion Model and Measurement Model
2.4. PMBM Conjugate Prior
3. The GGIW-MD-PMBM Filter
3.1. Prediction
3.1.1. Detected Targets
3.1.2. Undetected Targets
3.2. Update
3.2.1. Detected Targets
3.2.2. Undetected Targets
3.3. Complexity Reduction and Data Association
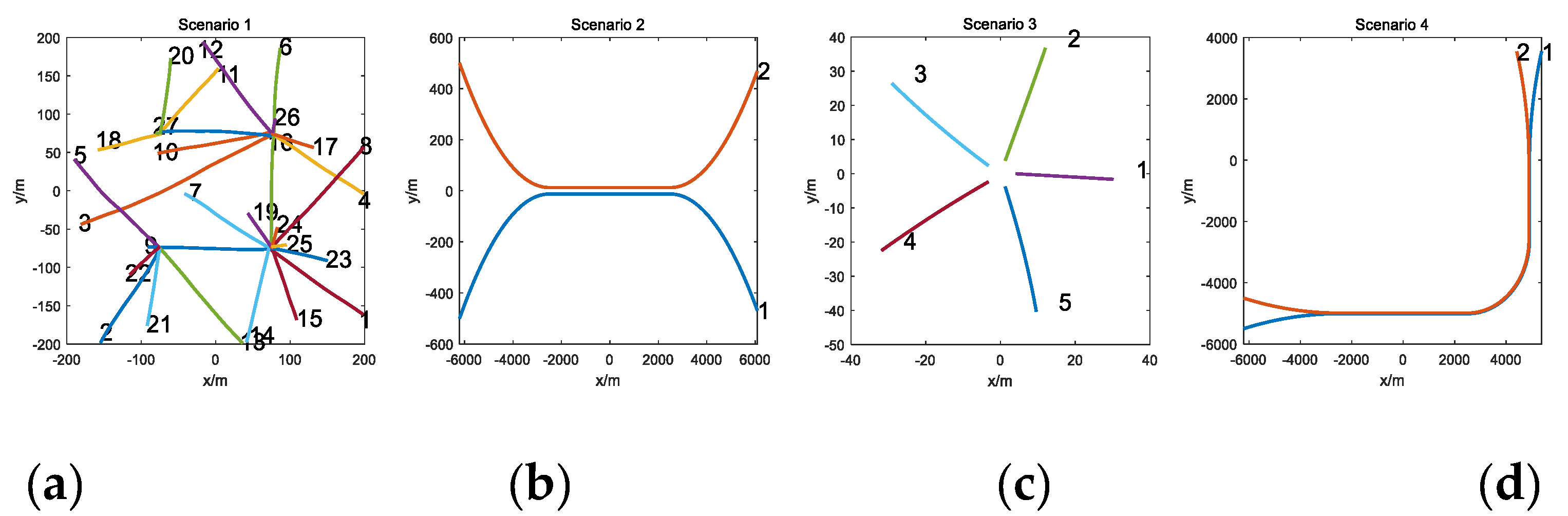
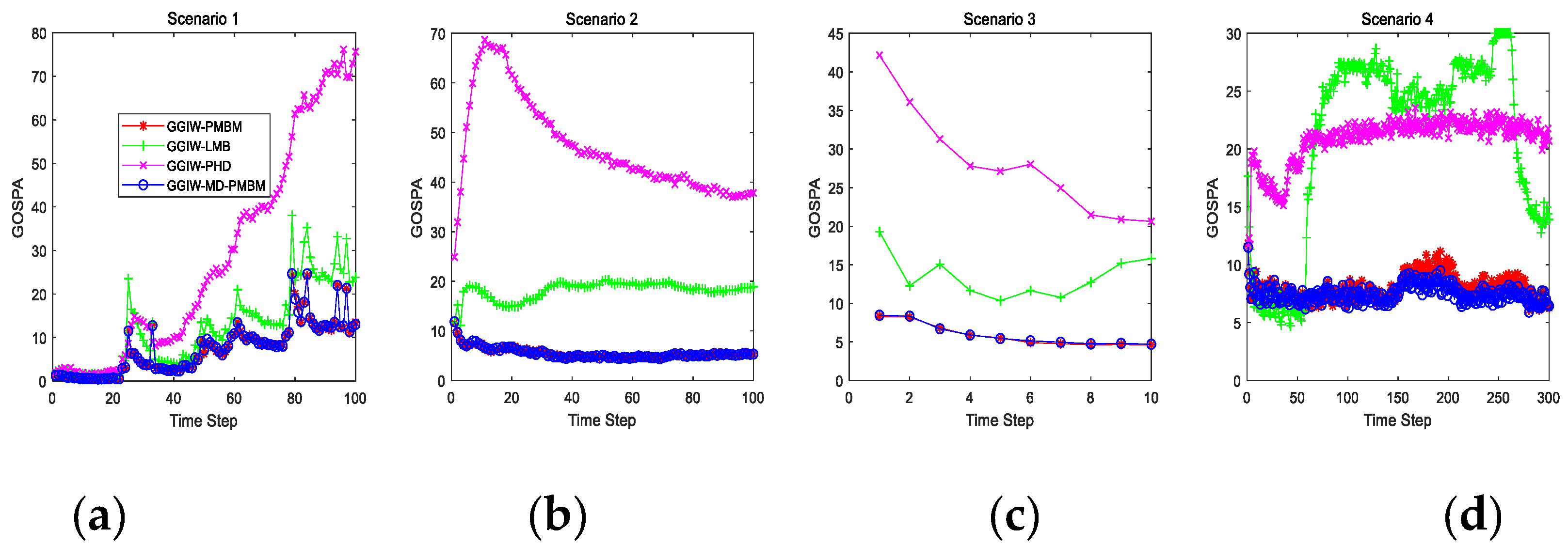
4. Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Vo, B.N.; Mallick, M.; Bar-shalom, Y.; Coraluppi, S.; Osborne, R., III; Mahler, R.; Vo, B.T. Multitarget tracking. Wiley Encycl. Electr. Electron. Eng. 2015. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Granstrom, K.; Baum, M. Extended Object Tracking: Introduction, Overview and Applications. J. Adv. Inf. Fusion 2017, 12, 139–174. [Google Scholar]
- Gilholm, K.; Godsill, S.; Maskell, S.; Salmond, D. Poisson models for extended target and group tracking. In Proceedings of the Signal and Data Processing of Small Targets, San Diego, CA, USA, 31 July–4 August 2005; pp. 230–241. [Google Scholar]
- Granstrom, K.; Salmond, D. Spatial distribution model for tracking extended objects. IEEE Proc. Radarsonar Navig. 2005, 152, 364–371. [Google Scholar]
- Koch, J.W. Bayesian approach to extended object and cluster tracking using random matrices. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1042–1059. [Google Scholar] [CrossRef]
- Feldmann, M.; FraNken, D.; Koch, W. Tracking of Extended Objects and Group Targets Using Random Matrices. IEEE Trans. Signal Process. 2010, 59, 1409–1420. [Google Scholar] [CrossRef]
- Feldmann, M.; Fränken, D. Advances on Tracking of Extended Objects and Group Targets using Random Matrices. In Proceedings of the 2009 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; Volume 59, pp. 1029–1036. [Google Scholar]
- Granstrom, K.; Orguner, U. A phd Filter for Tracking Multiple Extended Targets Using Random Matrices. IEEE Trans. Signal Process. 2012, 60, 5657–5671. [Google Scholar] [CrossRef]
- Orguner, U. A variational measurement update for extended target tracking with random matrices. IEEE Trans. Signal Process. 2012, 60, 3827–3834. [Google Scholar] [CrossRef]
- Granstrom, K.; Orguner, U. A New Prediction Update for Extended Target Tracking with Random Matrices. IEEE Trans. Aerosp. Electron. Syst. 2014, 2, 324–336. [Google Scholar]
- Liu, J.; Guo, G. A Random Matrix Approach for Extended Target Tracking Using Distributed Measurements. IEEE Sens. J. 2019, 99, 1–12. [Google Scholar]
- Lan, J.; Li, X.R. Extended-Object or Group-Target Tracking Using Random Matrix with Nonlinear Measurements. IEEE Trans. Signal Process. 2019, 99, 1–15. [Google Scholar] [CrossRef]
- Wang, L.; Huang, Y.; Zhan, R.; Zhang, J. Joint Tracking and Classification of Extended Targets Using Random Matrix and Bernoulli Filter for Time-Varying Scenarios. IEEE Access 2019, 7, 129584–129603. [Google Scholar] [CrossRef]
- Lu, Z.; Hu, W.; Liu, Y.; Kirubarajan, T. Seamless Group Target Tracking Using Random Finite Sets. Signal Process. 2020, 176, 1–13. [Google Scholar] [CrossRef]
- Gao, L.; Jing, Z.; Li, M.; Pan, H. Bayesian approach to multiple extended targets tracking with random hypersurface models. IET Radar Sonar Navig. 2019, 13, 601–611. [Google Scholar] [CrossRef]
- Wang, X.; Li, H.G.; Kong, Y.B.; Pu, L.; Fan, P.F. SMC-PHD filter for extended target tracking based on star-convex random hypersurface models. Appl. Res. Comput. 2017, 34, 2144–2147. [Google Scholar]
- Liu, Z.P.; Liu, Y.J. Extended Target Tracking Algorithm Based on Star-Convex Random Hypersurface Models. Electron. Opt. Control 2017, 24, 72–76, 82. [Google Scholar]
- Li, Y.W. Extended Target Tracking Algorithm Based on Random Hypersurface Model with Glint Noise. Chem. Eng. Trans. 2017, 59, 685–690. [Google Scholar]
- Baum, M.; Hanebeck, U.D. Random Hypersurface Models for extended object tracking. In Proceedings of the IEEE International Symposium on Signal Processing and Information Technology, Ajman, UAE, 14–17 December 2009; IEEE: Piscataway, NJ, USA, 2010; pp. 178–183. [Google Scholar]
- Baum, M.; Hanebeck, U.D. Extended Object Tracking with Random Hypersurface Models. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 149–159. [Google Scholar] [CrossRef] [Green Version]
- Wahlström, N.; Özkan, E. Extended Target Tracking Using Gaussian Processes. IEEE Trans. Signal Process. 2015, 63, 4165–4178. [Google Scholar] [CrossRef] [Green Version]
- Mahler, R. Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2007; pp. 1–48. [Google Scholar]
- Lian, F.; Han, C.; Liu, W.; Chen, H. Joint spatial registration and multi-target tracking using an extended probability hypothesis density filter. IET Radar Sonar Navig. 2011, 5, 441–448. [Google Scholar] [CrossRef]
- Li, G.; Zhang, H.Q.; Wang, Y. An Efficient Multi-Target Tracking Algorithm Using Gaussian Mixture Probability Hypothesis Density Filter. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Liu, L.; Ji, H.; Zhang, W.; Liao, G. Multi-Sensor Multi-Target Tracking Using Probability Hypothesis Density Filter. IEEE Access 2019, 7, 67745–67760. [Google Scholar] [CrossRef]
- Li, C.; Wang, R.; Hu, Y.; Wang, J. Cardinalised probability hypothesis density tracking algorithm for extended objects with glint noise. IET Sci. Meas. Technol. 2016, 10, 528–536. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. Analytic Implementations of the Cardinalized Probability Hypothesis Density Filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Li, B.; Yi, H.W.; Li, X.H. Innovative unscented transform–based particle cardinalized probability hypothesis density filter for multi-target tracking. Meas. Control Lond. Inst. Meas. Control 2019, 52, 1567–1578. [Google Scholar] [CrossRef]
- Chen, J.G.; Wang, X.H.; Ma, L.L.; Zhang, X.D.; Gong, L.M. Cardinalized Probability Hypothesis Density Smoother Using Piece-wise RTS. Comput. Eng. Appl. 2019, 55, 50–55, 95. [Google Scholar]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Robust Multi-Bernoulli Sensor Selection for Multi-Target Tracking in Sensor Networks. IEEE Signal Process. Lett. 2013, 20, 1167–1170. [Google Scholar] [CrossRef]
- Park, W.J.; Park, C.G. Multi-target Tracking Based on Gaussian Mixture Labeled Multi-Bernoulli Filter with Adaptive Gating. In Proceedings of the 2019 First International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 16–18 January 2019; pp. 226–229. [Google Scholar]
- Cament, L.; Correa, J.; Adams, M.; Pérez, C. The Histogram Poisson, Labeled Multi-Bernoulli Multi-Target Tracking Filter. Signal Process. 2020, 176, 837–851. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, J.; Liang, S. Multi-Objective Optimization Based Multi-Bernoulli Sensor Selection for Multi-Target Tracking. Sensors 2019, 19, 1884–2021. [Google Scholar] [CrossRef] [Green Version]
- Mahler, R. PHD filters for nonstandard targets, I: Extended targets. In Proceedings of the 2009 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 915–921. [Google Scholar]
- Granstrom, K.; Lundquist, C.; Orguner, U. A Gaussian mixture PHD filter for extended target tracking. In Proceedings of the International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2011. [Google Scholar]
- Han, Y.; Zhu, H.; Han, C.Z. A Gaussian-mixture PHD filter based on random hypersurface model for multiple extended targets. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013. [Google Scholar]
- Lundquist, C.; Granstrom, K.; Orguner, U. An extended target CPHD filter and a gamma Gaussian inverse Wishart implementation. J. Sel. Top. Signal Process. 2013, 7, 472–483. [Google Scholar] [CrossRef] [Green Version]
- Orguner, U.; Lundquist, C.; Granstrom, K. Extended target tracking with a cardinalized probability hypothesis density filter. In Proceedings of the 14th International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011. [Google Scholar]
- Granstrom, K.; Fatemi, M.; Svensson, L. Poisson multi-Bernoulli conjugate prior for multiple extended object estimation. IEEE Trans. Aerosp. Electron. Syst. 2018, 3, 30–45. [Google Scholar]
- Granstrom, K.; Fatemi, M.; Svensson, L. Gamma Gaussian inverse-Wishart Poisson multi-Bernoulli filter for extended target tracking. In Proceedings of the 19th International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016. [Google Scholar]
- Beard, M.; Reuter, S.; Granström, K.; Vo, B.T.; Vo, B.N.; Scheel, A. A Generalised Labelled Multi-Bernoulli Filter for Extended Multi-target Tracking. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015. [Google Scholar]
- Beard, M.; Reuter, S.; Granström, K.; Vo, B.T.; Vo, B.N.; Scheel, A. Multiple extended target tracking with labelled random finite sets. IEEE Trans. Signal Process. 2016, 64, 1638–1653. [Google Scholar] [CrossRef] [Green Version]
- Granstrom, K.; Orguner, U. Estimation and maintenance of measurement rates for multiple extended target tracking. In Proceedings of the 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 2170–2176. [Google Scholar]
- Liu, Z.X.; Xie, W.X. Multi-target Bayesian filter for propagating marginal distribution. Signal Process. 2014, 105, 328–337. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Willett, P.K.; Tian, X. Tracking and Data Fusion: A Handbook of Algorithms; YBS Publishing: Storrs, CT, USA, 2011. [Google Scholar]
- Rahmathullah, A.S.; García-Fernández, Á.F.; Svensson, L. Generalized optimal sub-pattern assignment metric. In Proceedings of the 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; pp. 1–8. [Google Scholar]
- Yang, S.S.; Baum, M.; Granstrom, K. Metrics for performance evaluation of elliptic extended object tracking methods. In Proceedings of the International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Baden-Baden, Germany, 19–21 September 2016; pp. 523–528. [Google Scholar]



{kind=link}
{kind=link}
| Scenario | ||||
|---|---|---|---|---|
| Scenario 1 | 0.90 | 0.99 | 60 | {7,8,9} |
| Scenario 2 | 0.98 | 0.99 | 10 | {10,20} |
| Scenario 3 | 0.90 | 0.99 | 20 | 10 |
| Scenario 4 | 0.98 | 0.99 | 10 | {10,20} |
| Scenarios | GGIW-PMBM | GGIW-LMB | GGIW-PHD | GGIW-MD-PMBM | |
|---|---|---|---|---|---|
| Scenario 1 | GO | 732.8 | 1246.7 | 2873.2 | 729 |
| LE | 56.5 | 76.6 | 60.7 | 56.3 | |
| NM | 61.3 | 481.0 | 2311.6 | 60.7 | |
| NF | 141.4 | 96.2 | 108.5 | 137 | |
| CT | 62.5 | 8.0 | 4.2 | 46.2 | |
| Scenario 2 | GO | 550.7 | 1818.2 | 4699.5 | 550.5 |
| LE | 268.0 | 133.9 | 562.3 | 265.1 | |
| NM | 5.6 | 1479.5 | 997.5 | 5.0 | |
| NF | 16.9 | 193.8 | 3083.2 | 10.8 | |
| CT | 18.6 | 7.0 | 0.3 | 11.4 | |
| Scenario 3 | GO | 59.2 | 134.8 | 280.4 | 58.3 |
| LE | 9.3 | 11.5 | 23.1 | 9.5 | |
| NM | 11.2 | 73.8 | 174.7 | 10.6 | |
| NF | 2.1 | 12.1 | 31.8 | 2.5 | |
| CT | 1.2 | 0.4 | 0.1 | 1.1 | |
| Scenario 4 | GO | 2835.6 | 6266.3 | 6257.8 | 2236.7 |
| LE | 1011.2 | 869.3 | 176.8 | 1002.8 | |
| NM | 253.6 | 3770.6 | 5601.2 | 139.4 | |
| NF | 175.0 | 1445.2 | 470.8 | 106.2 | |
| CT | 49.7 | 6.5 | 2.2 | 40.6 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, H.; Xie, W. Extended Target Marginal Distribution Poisson Multi-Bernoulli Mixture Filter. Sensors 2020, 20, 5387. https://doi.org/10.3390/s20185387
Du H, Xie W. Extended Target Marginal Distribution Poisson Multi-Bernoulli Mixture Filter. Sensors. 2020; 20(18):5387. https://doi.org/10.3390/s20185387
Chicago/Turabian StyleDu, Haocui, and Weixin Xie. 2020. "Extended Target Marginal Distribution Poisson Multi-Bernoulli Mixture Filter" Sensors 20, no. 18: 5387. https://doi.org/10.3390/s20185387
APA StyleDu, H., & Xie, W. (2020). Extended Target Marginal Distribution Poisson Multi-Bernoulli Mixture Filter. Sensors, 20(18), 5387. https://doi.org/10.3390/s20185387