Cost-Effective Wearable Indoor Localization and Motion Analysis via the Integration of UWB and IMU


Abstract
:1. Introduction
2. Related Work
2.1. Indoor Localization Techniques: The State-of-the-Art
2.2. Problem Statement
3. UWB-IMU Integrated Indoor Localization System
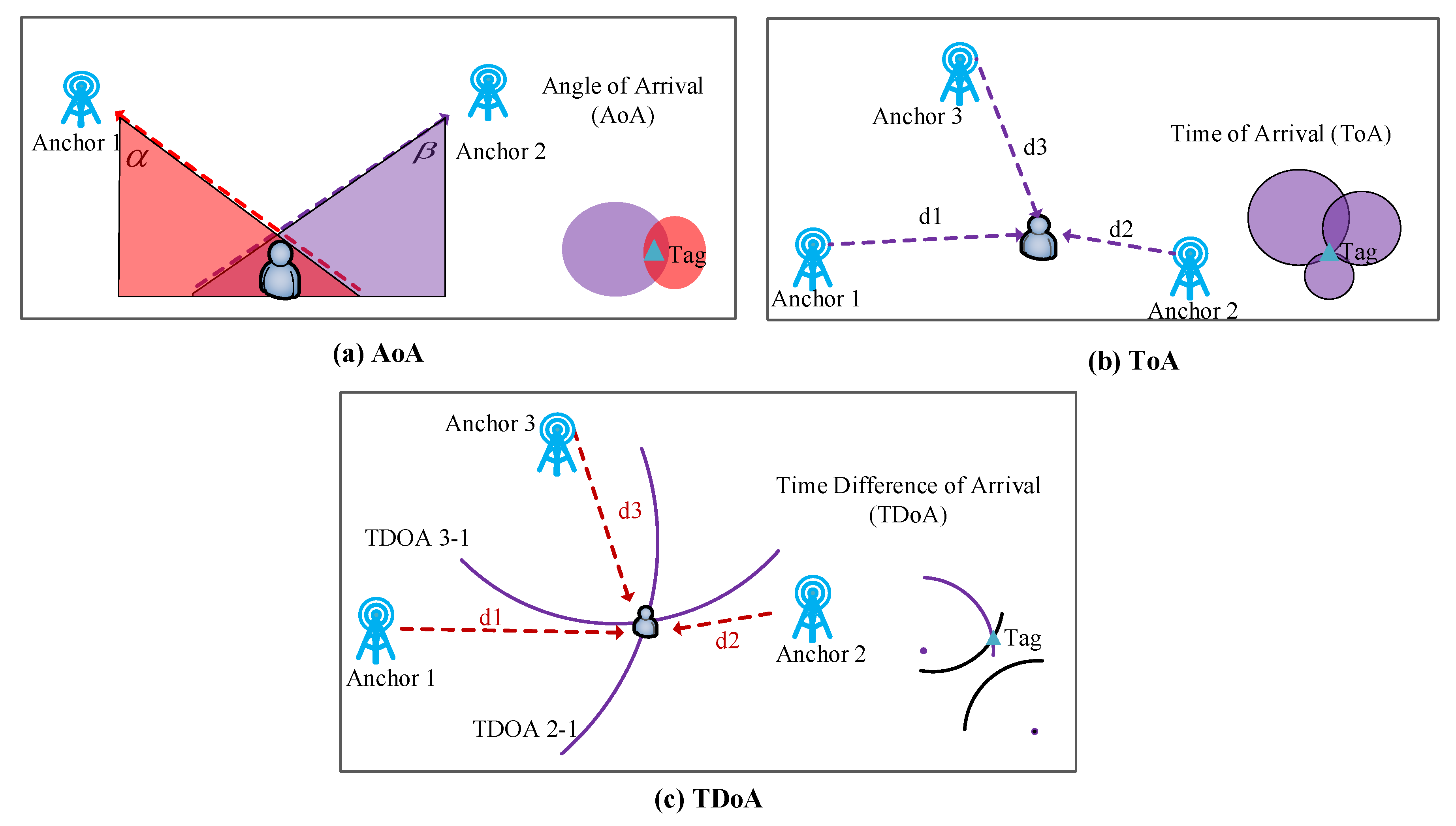
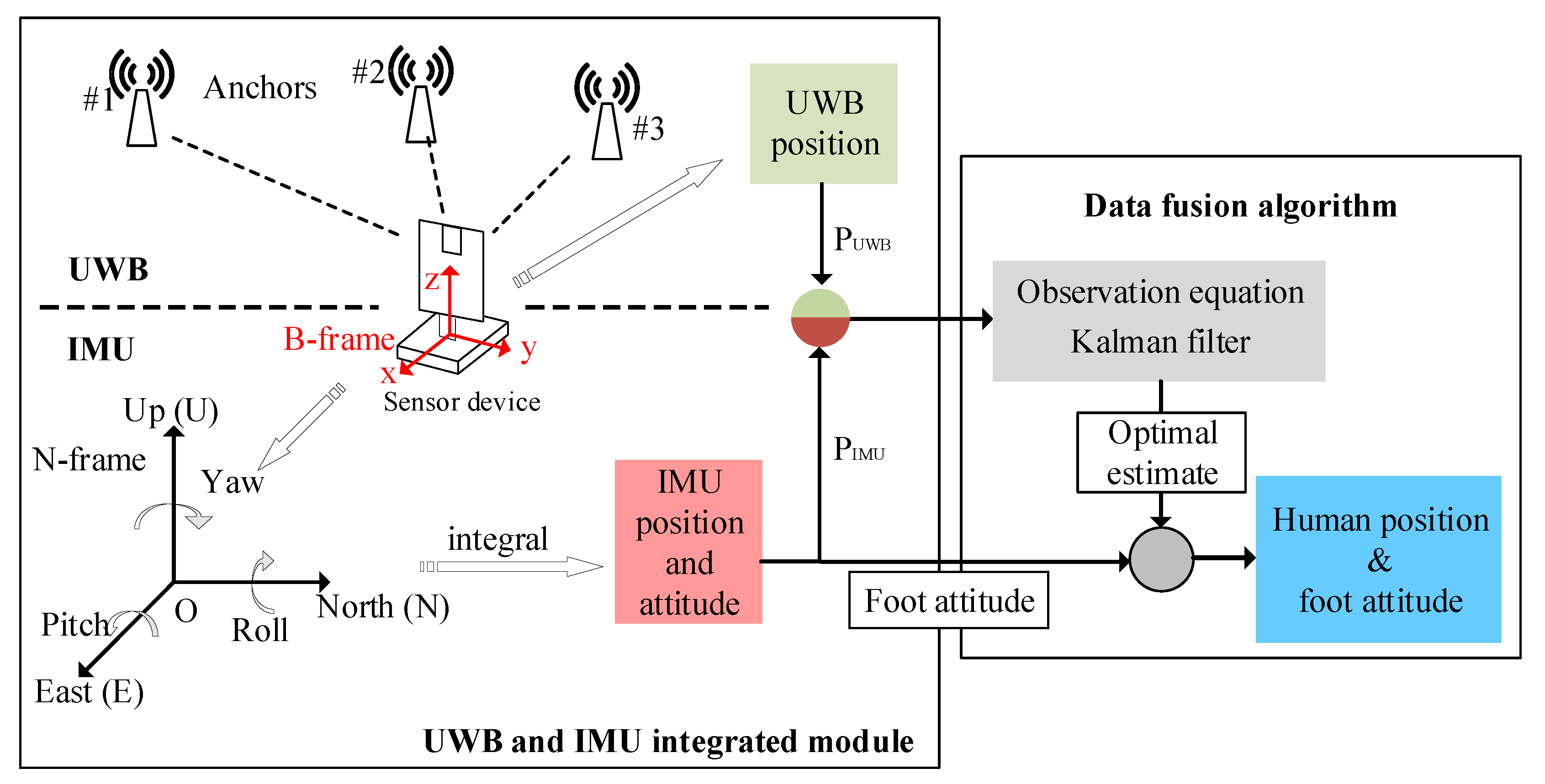
3.1. Fundamentals of UWB and IMU Localization
3.2. The Designed System Based on IMU and UWB Modules
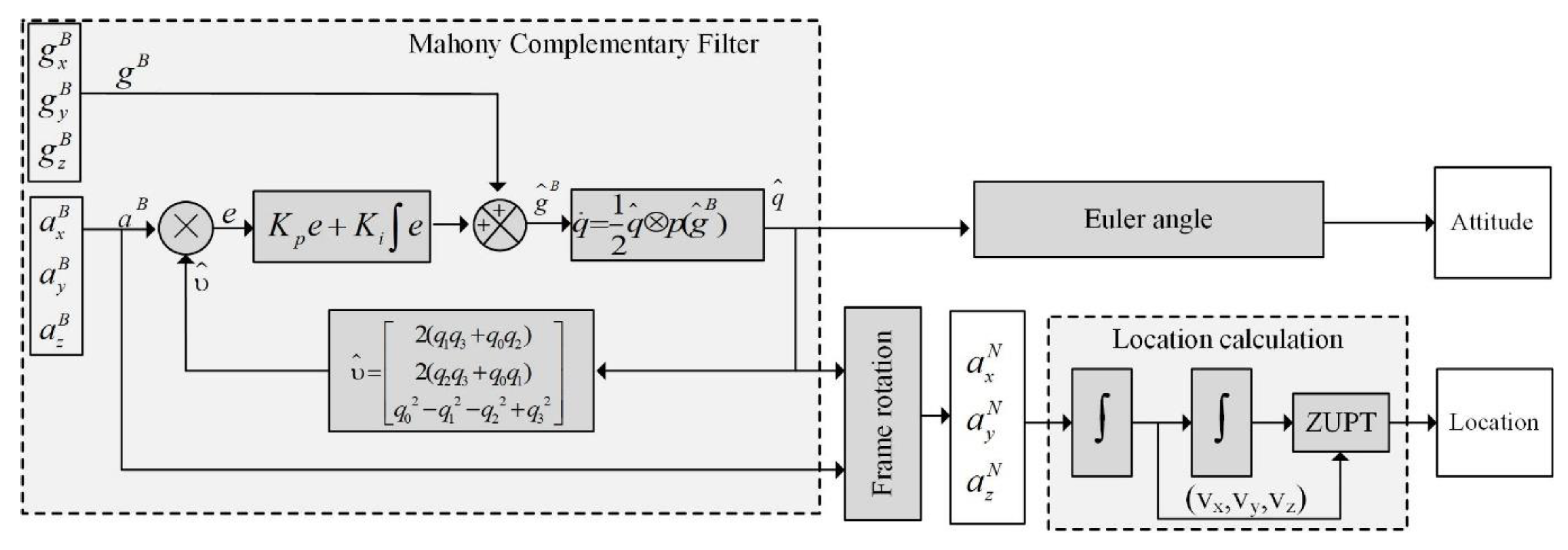
3.2.1. IMU-Based Position Estimation with a Kalman Filter
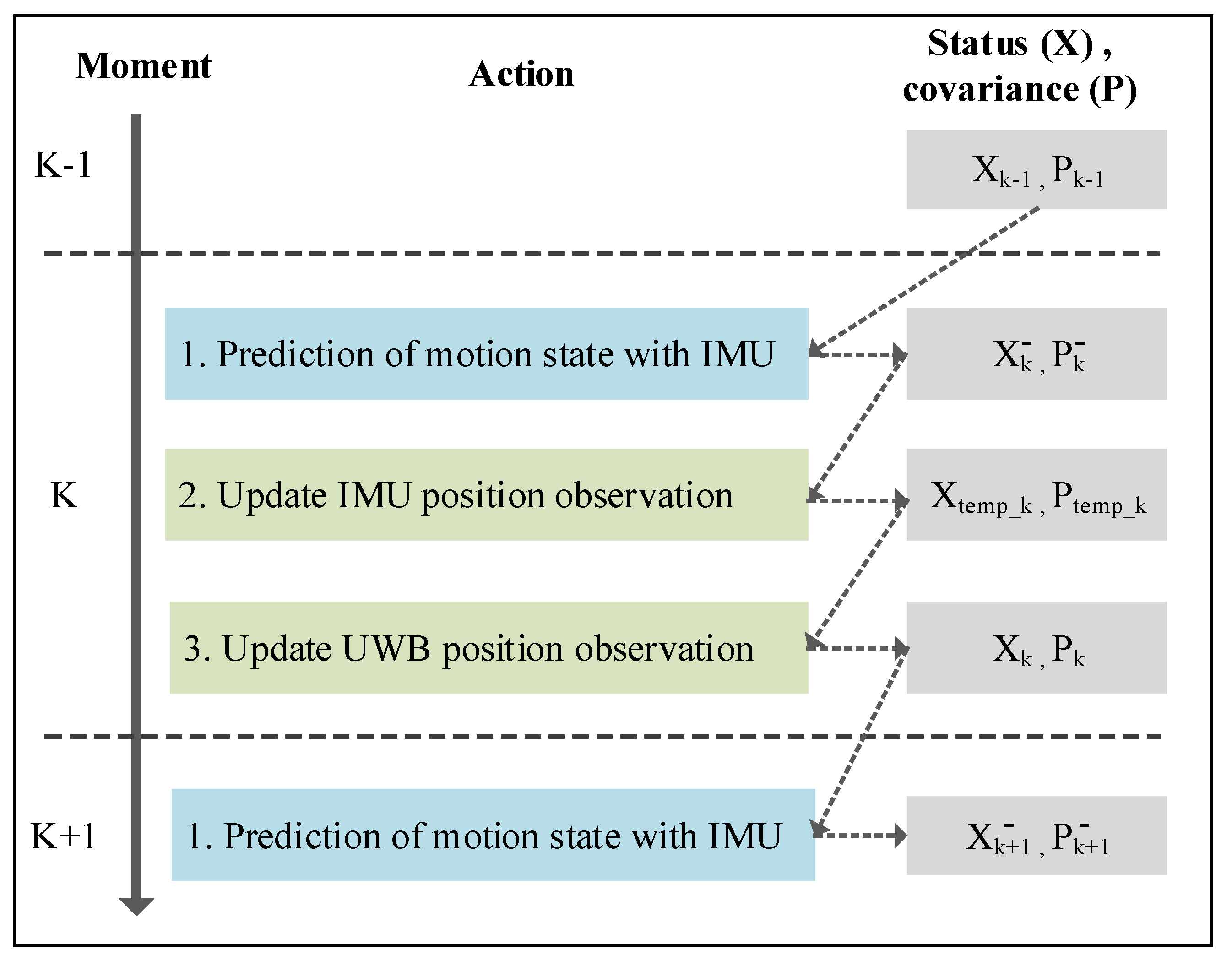
3.2.2. UWB-IMU Data Fusion Model
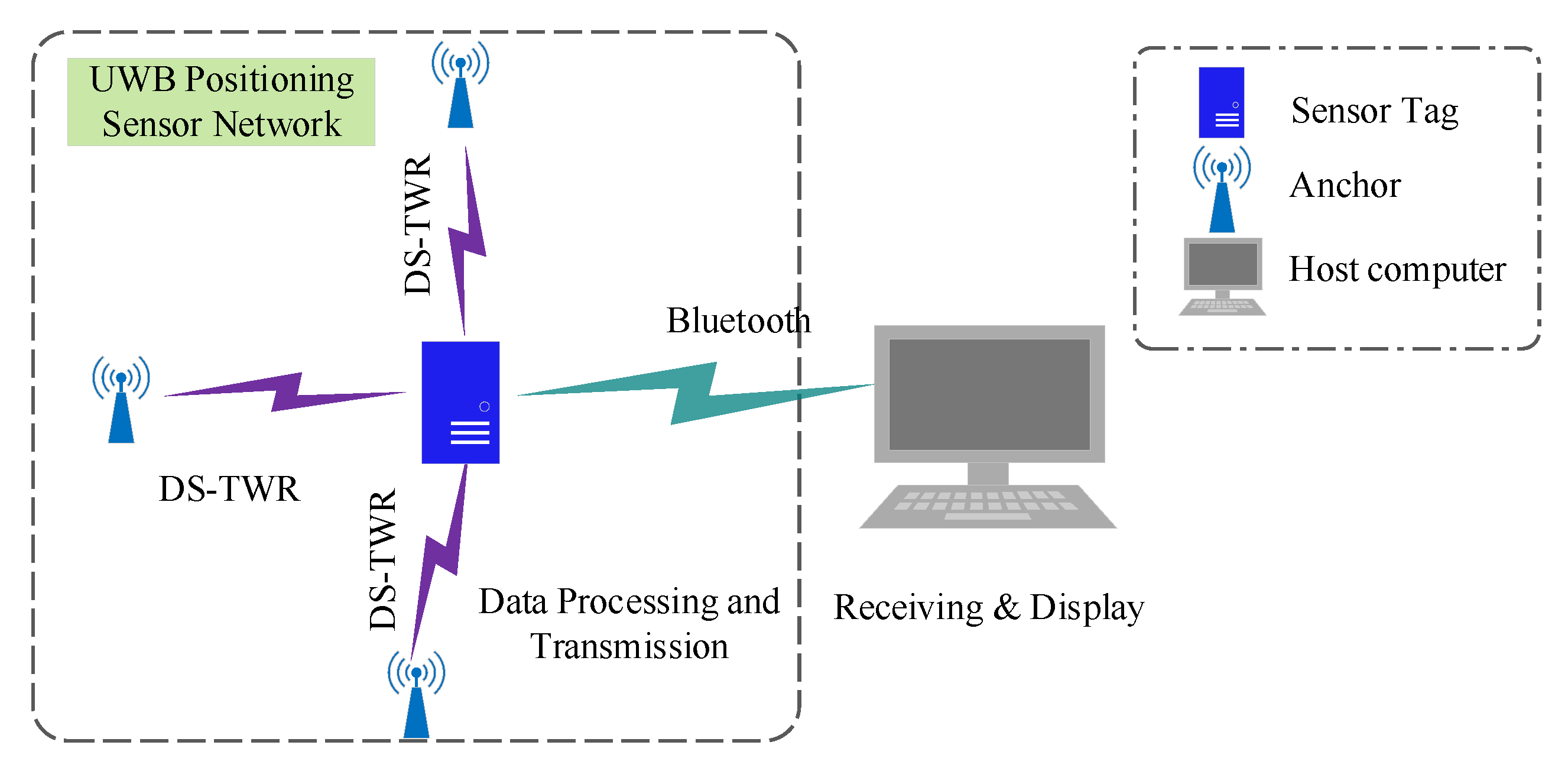
3.3. Hardware Design and Data Synchronization
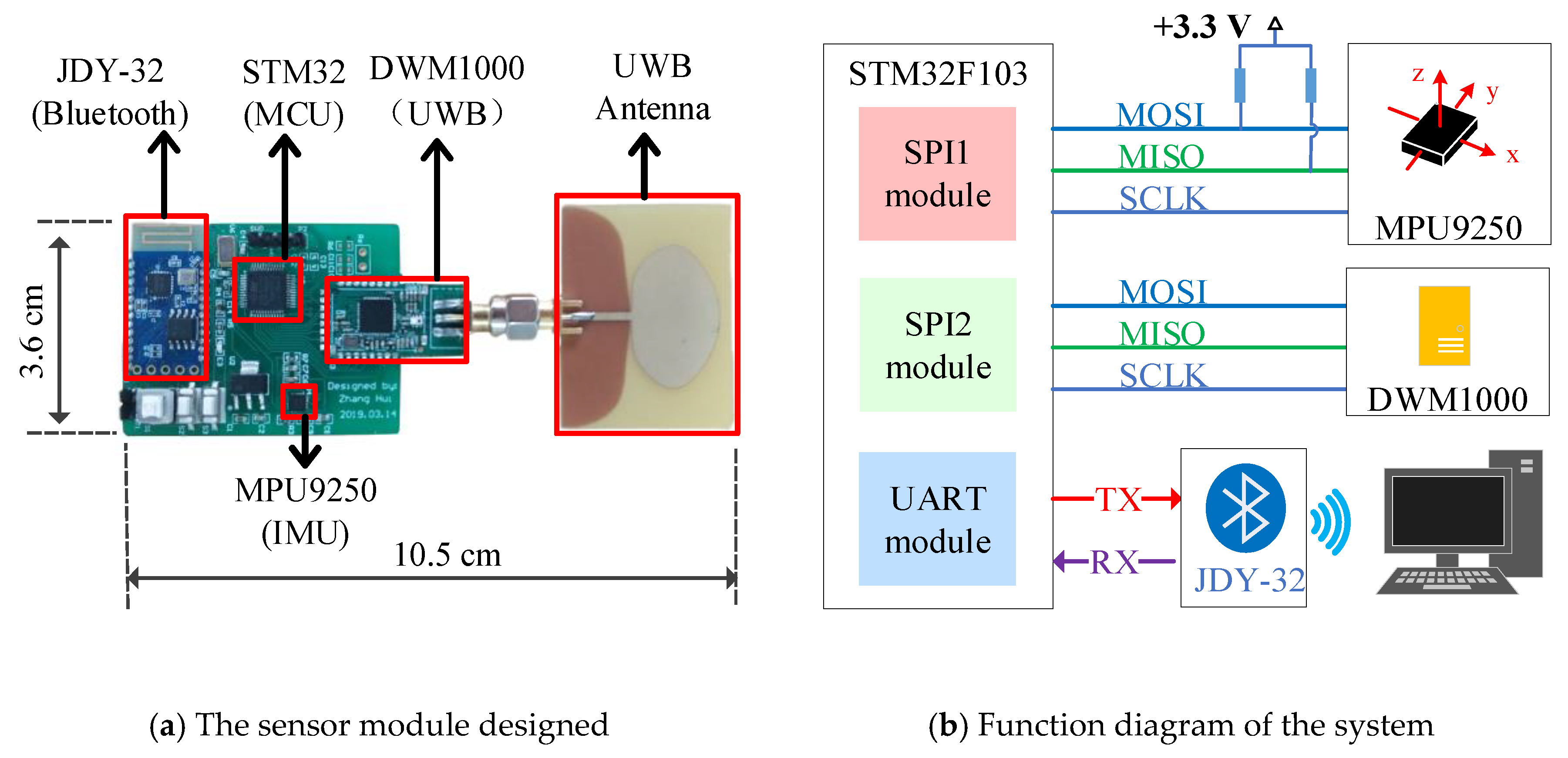
3.3.1. Hardware Design
3.3.2. Synchronized Processing for IMU and UWB Signals
4. Experimental Verification and Results Analysis
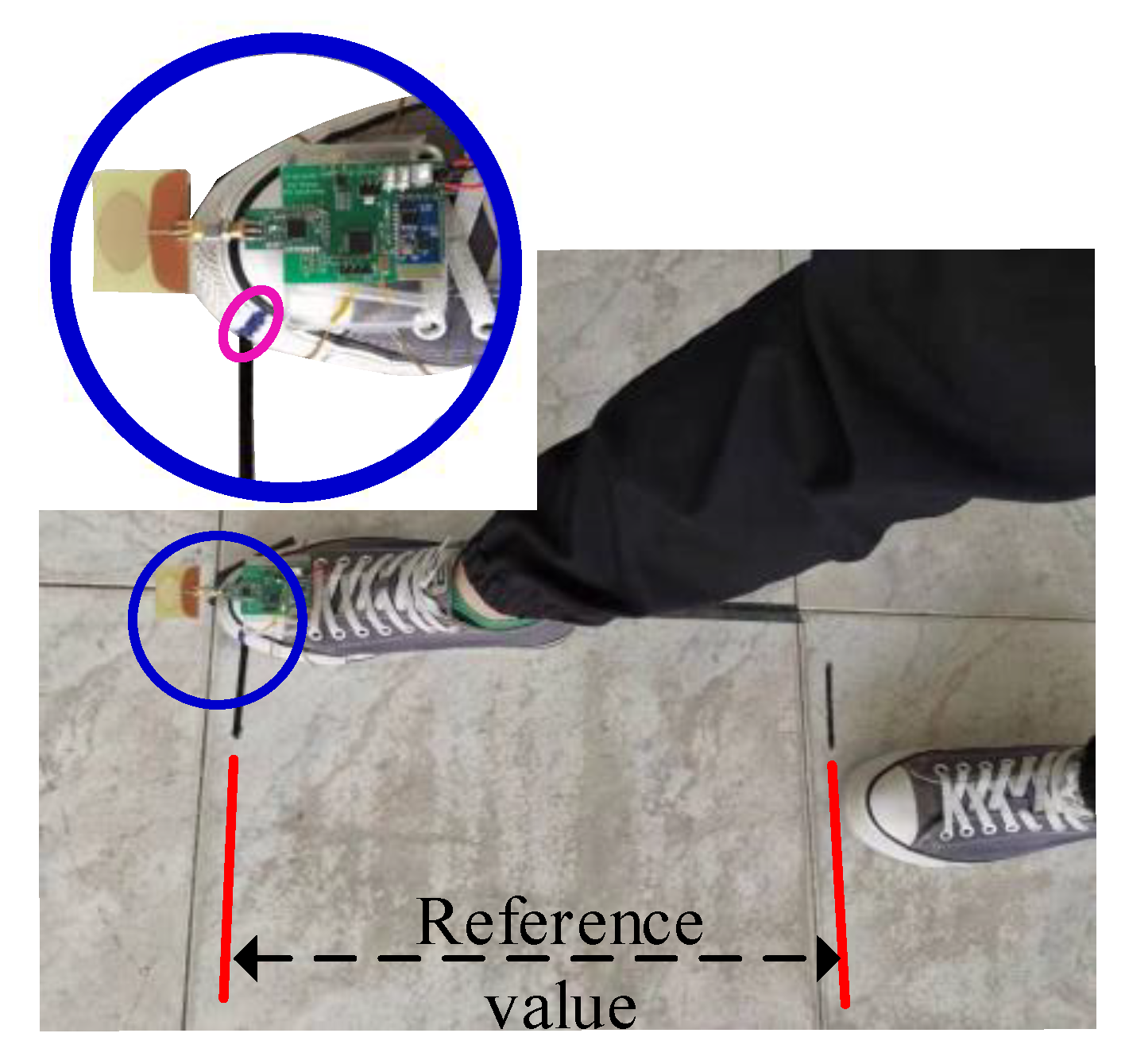
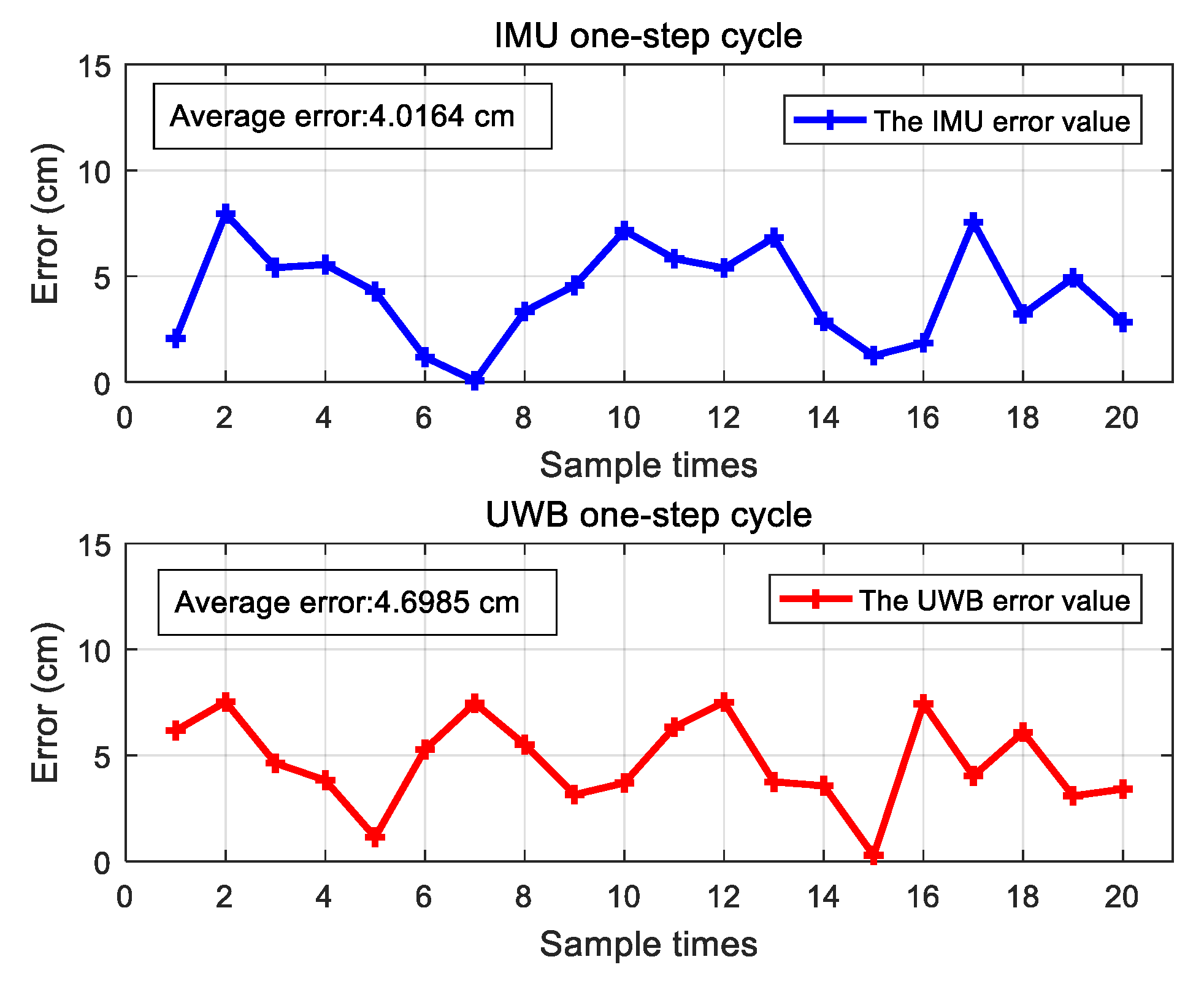
4.1. Measurement of One-Step Walking
4.2. Rectangular and Arbitrary Path Continuous Walking
4.2.1. Experimental Setup
4.2.2. Tests with a Rectangular Path
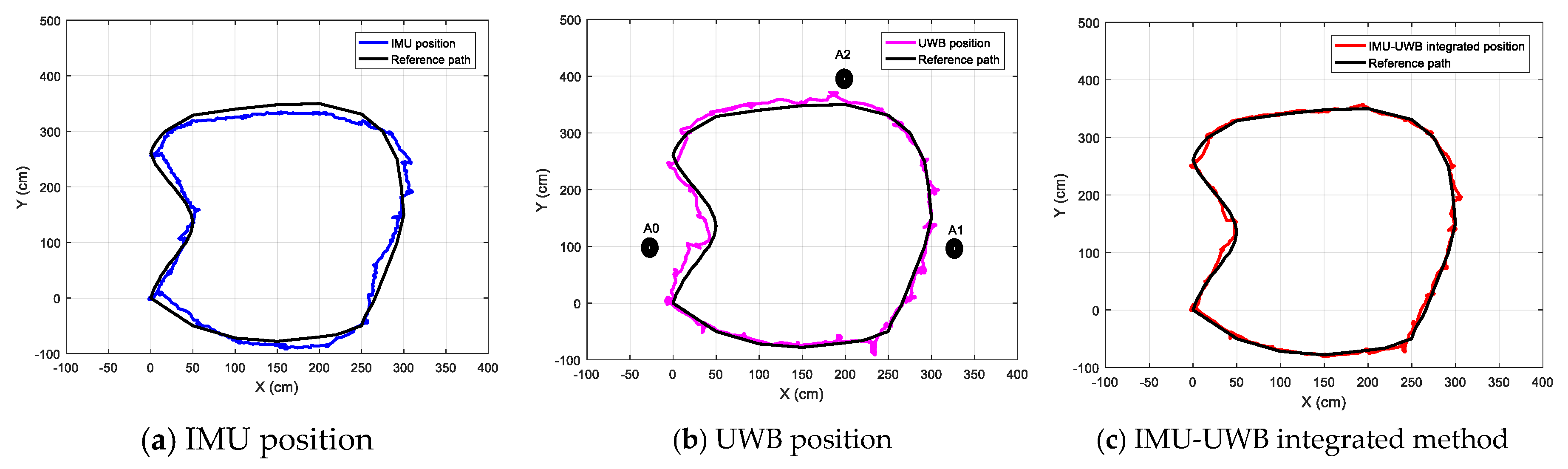
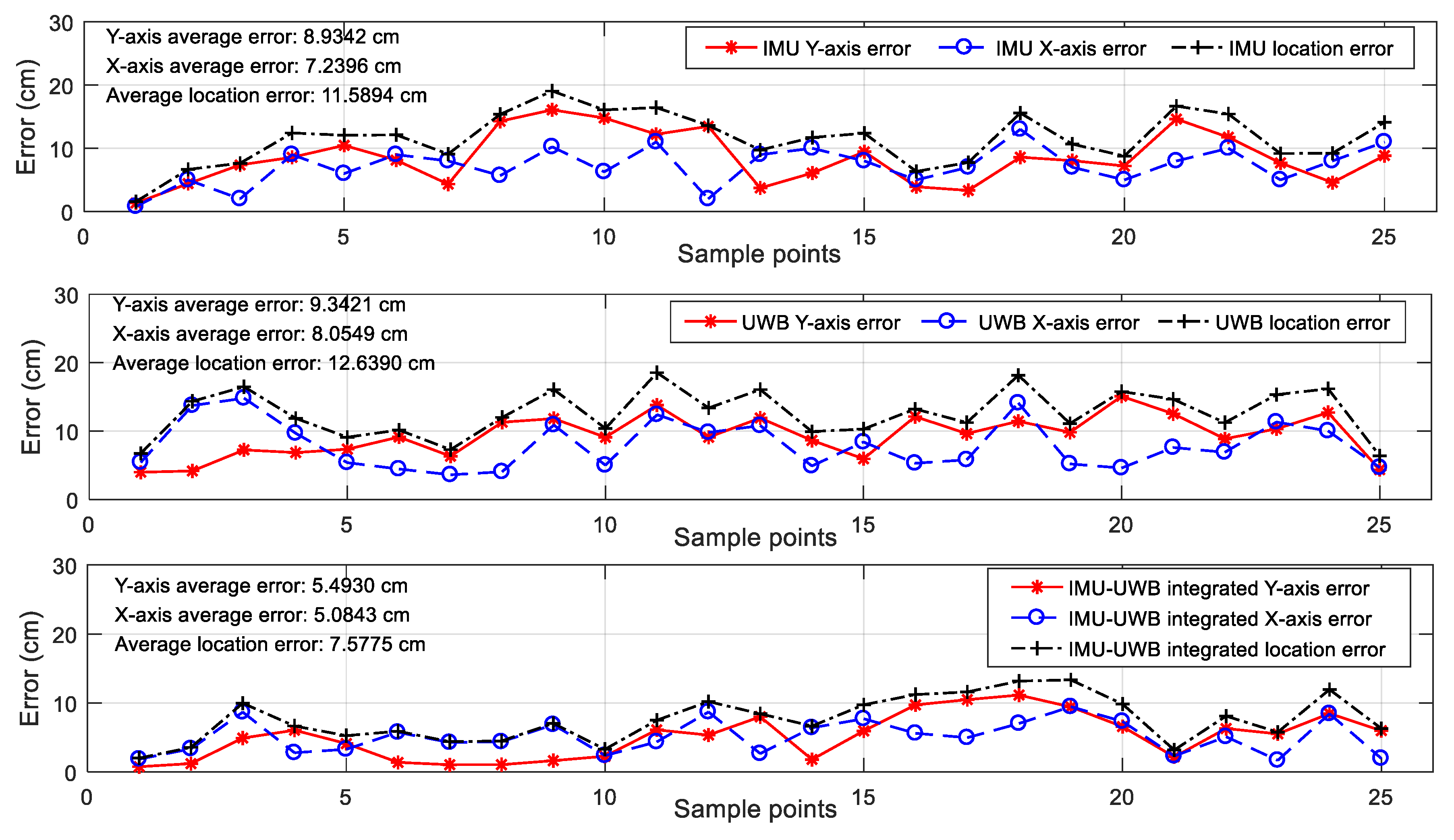
- (1)
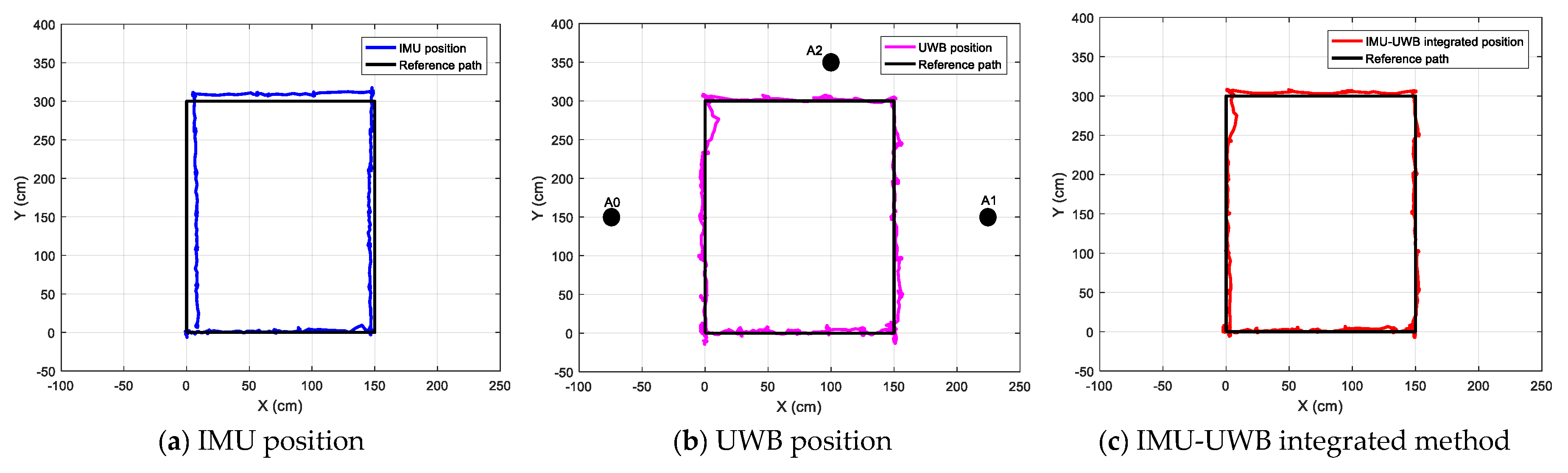
- For the IMU measurement, there was an evident systemic error, as seen by the deviation between the black and blue lines in Figure 13a, which was hard to correct by the module itself. This was because the current location was calculated by integrating the variations of previous moments. However, the location was relatively stable and the error for one single step is not evident.
- (2)
- For the UWB system, it was susceptible to NLoS occlusion of experimenter’s ankles, resulting in a bias error. As shown in Figure 13b, the positioning error caused by NLoS appeared multiple times in the UWB positioning results, and the error in the upper-left corner was significant. Although the localization accuracy was competitive for indoor applications, the results were not stable since the UWB radio was susceptible to ambient interferences.
- (3)
- For the UWB-IMU integrated system, the advantages of the above two systems were combined. The UWB data was used to compensate for the inertial localization, and the inertial data was used to correct the UWB positioning data to make it more stable. The two sets of displacement data were iteratively compensated by the fusion algorithm, and as shown in Figure 13c, the final localization results were more accurate and stable.
4.2.3. Tests with an Arbitrary Path
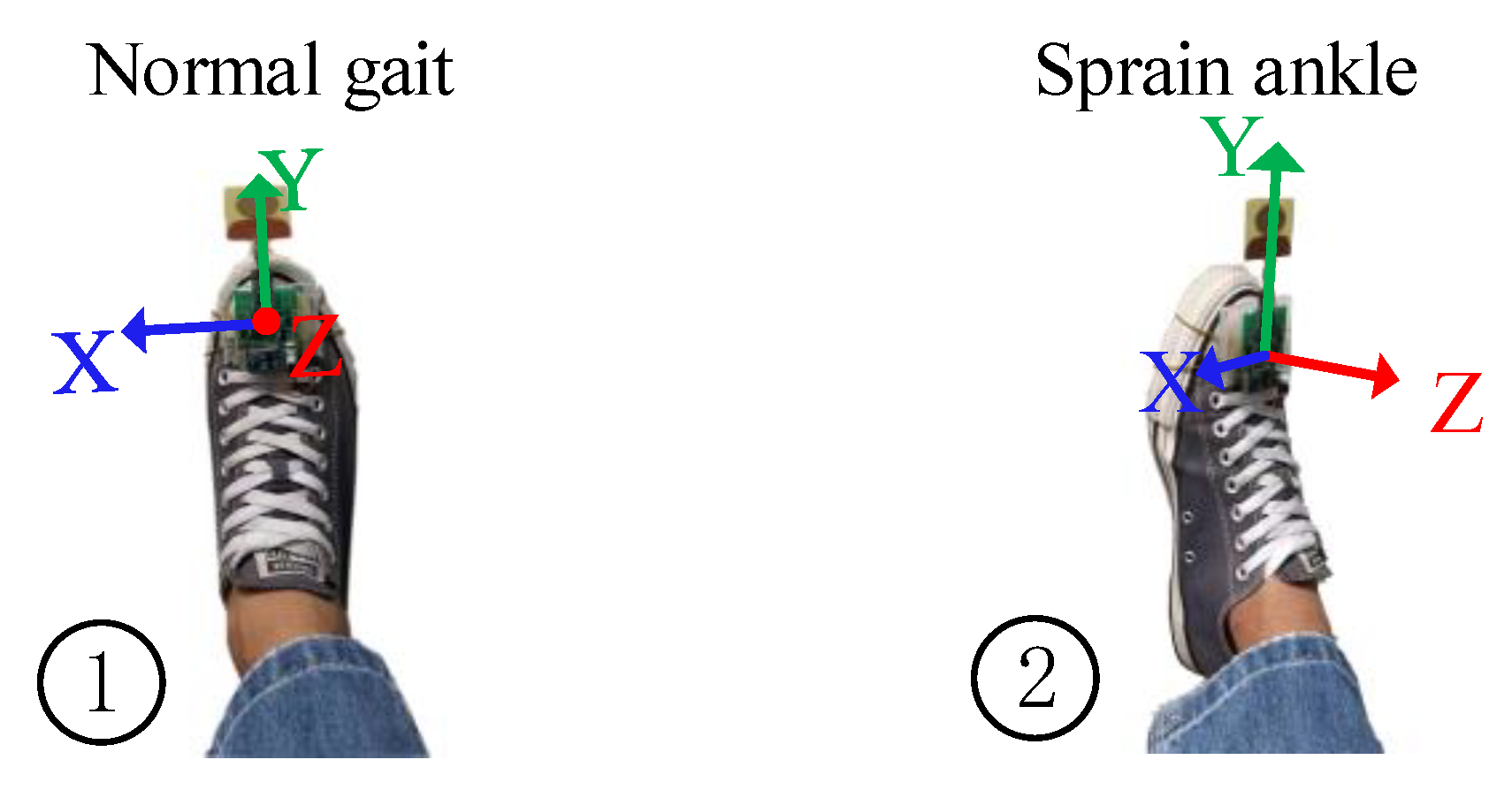
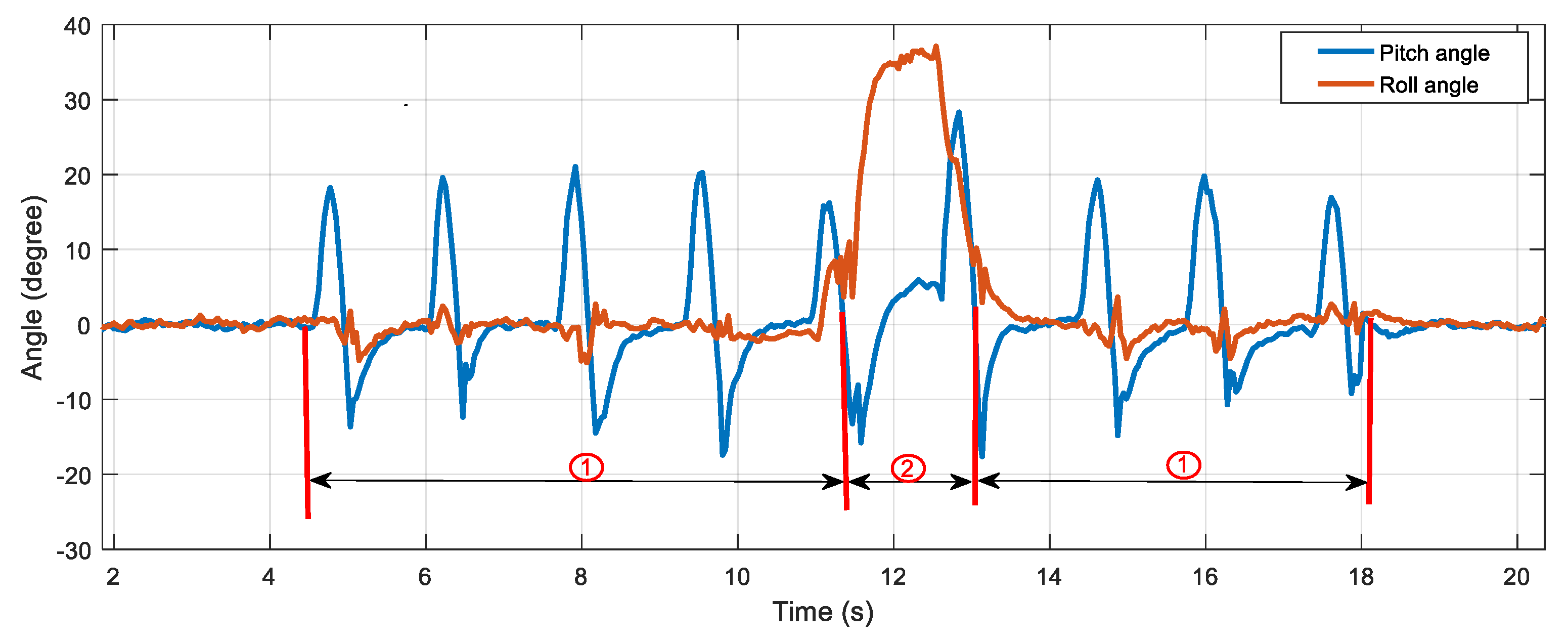
4.3. Real-Time Attitude Measurement for Gait Analysis
5. Discussion
- (1)
- For the IMU measurement, it was evident that the inertial measurement suffered from error accumulation although a ZUPT algorithm was implemented. The accumulated error finally turned to a system error in the inflection points, which decreased the accuracy of the final results. The possible solutions for correcting this system error might be to identify the inflection point and correct the inertial measurement result with a UWB measurement. This method may be able to effectively reduce the IMU accumulation error in the inflection point and promote the accuracy of localization results.
- (2)
- The UWB measurement showed evident random errors, and there was also evident greater measurement errors when there was a NLoS occlusion between the sensor node and the UWB anchors. Being incapable of dealing with this error resulted in a lower localization accuracy. The promising solution to handle this error is to observe the gradient of the UWB location and IMU location and determine the emergence of barriers and correct the error by adjusting the trust weight of the UWB and IMU results.
6. Conclusions and Future Work
6.1. Conclusions
6.2. Future Work
- (1)
- A smart algorithm to automatically identify the NLoS blocking errors and adjust the weight of trust between the UWB results and IMU results to improve the localization accuracy.
- (2)
- The determination of the key turning corners in the motion where the IMU results may introduce errors and use the UWB location to correct the accumulated error of IMU localization results.
- (3)
- Comprehensive evaluation of the designed IMU-UWB system by comparing the estimation with more reliable references using methods such as the Cramer–Rao low bound (CRLB).
- (4)
- Evaluation of the influence caused by indoor environment including human body and furniture, such as the error caused by the random walking pedestrians and their walking speed.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- He, S.; Chan, S.H.G. Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Jo, H.J.; Kim, S. Indoor Smartphone Localization Based on LOS and NLOS Identification. Sensors 2018, 18, 3987. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kwon, Y.; Kwon, K. RSS ranging based indoor localization in ultra low power wireless network. AEU Int. J. Electron. Commun. 2019, 104, 108–118. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Liu, Y. Smartphones Based Crowdsourcing for Indoor Localization. IEEE Trans. Mob. Comput. 2015, 14, 444–457. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, P.; Chen, H.; Zhang, L. Wireless Indoor Localization Using Convolutional Neural Network and Gaussian Process Regression. Sensors 2019, 19, 2508. [Google Scholar] [CrossRef] [Green Version]
- Luo, R.C.; Hsiao, T.J. Dynamic Wireless Indoor Localization Incorporating with an Autonomous Mobile Robot Based on an Adaptive Signal Model Fingerprinting Approach. IEEE Trans. Ind. Electron. 2018, 66, 1940–1951. [Google Scholar] [CrossRef]
- Yang, X.; Zhao, F.; Chen, T. NLOS identification for UWB localization based on import vector machine. AEU Int. J. Electron. Commun. 2018, 87, 128–133. [Google Scholar] [CrossRef]
- Alrajeh, N.A.; Bashir, M.; Shams, B. Localization techniques in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2013, 9, 304628. [Google Scholar] [CrossRef] [Green Version]
- Dardari, D.; Closas, P.; Djuric, P.M. Indoor Tracking: Theory, Methods, and Technologies. IEEE Trans. Veh. Technol. 2015, 64, 1263–1278. [Google Scholar] [CrossRef] [Green Version]
- Robert, M.; Tarek, H.; Jean-Michel, P. Nonlinear complementary filters on the special orthogonal group. IEEE Trans. Autom. Control 2008, 53, 1203–1217. [Google Scholar]
- Wan, E.A.; Van der Merwe, R. The Unscented Kalman Filter for Nonlinear Estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium, Lake Louise, AB, Canada, 4 October 2000. [Google Scholar]
- Wang, Y.; Rajamani, R. Direct cosine matrix estimation with an inertial measurement unit. Mech. Syst. Signal Process. 2018, 109, 268–284. [Google Scholar] [CrossRef]
- Liu, M.; Lai, J.; Li, Z.; Liu, J. An adaptive cubature Kalman filter algorithm for inertial and land-based navigation system. Aerosp. Sci. Technol. 2016, 51, 52–60. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Experimental evaluation of the performance of arrays of MEMS accelerometers. Mech. Syst. Signal Process. 2019, 116, 933–942. [Google Scholar] [CrossRef]
- Sun, F.; Mao, C.; Fan, X.; Li, Y. Accelerometer-based speed-adaptive gait authentication method for wearable IoT devise. IEEE Internet Things J. 2019, 6, 820–830. [Google Scholar] [CrossRef]
- Lin, K.; Chen, M.; Deng, J.; Hassan, M.M.; Fortino, G. Enhanced fingerprinting and trajectory prediction for IoT localization in smart buildings. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1294–1307. [Google Scholar] [CrossRef]
- Pasku, V.; Angelis, A.D.; Angelis, G.D.; Arumugam, D.D.; Dionigi, M.; Carbone, P.; Moschitta, A.; Ricketts, D.S. Magnetic field-based positioning system. IEEE Commun. Surv. Tutor. 2017, 19, 2003–2017. [Google Scholar] [CrossRef]
- Baronti, P.; Barsocchi, P.; Chessa, S.; Mavilia, F.; Palumbo, F. Indoor Bluetooth low energy dataset for localization, tracking, occupancy, and social interaction. Sensors 2018, 18, 4462. [Google Scholar] [CrossRef] [Green Version]
- Luo, C.; Cheng, L.; Chan, M.C.; Gu, Y.; Li, J.; Ming, Z. Pallas: Self-Bootstrapping fine-grained passive indoor localization using WiFi monitors. IEEE Trans. Mob. Comput. 2017, 16, 466–481. [Google Scholar] [CrossRef]
- Minne, K.; Macoir, N.; Rossey, J.; Brande, Q.V.D.; Lemey, S.; Hoebeke, J.; Poorter, E.D. Experimental evaluation of UWB indoor positioning for indoor track cycling. Sensors 2019, 19, 2041. [Google Scholar] [CrossRef] [Green Version]
- Buffi, A.; Michel, A.; Nepa, P.; Tellini, B. RSSI measurements for RFID tag classification in smart storage systems. IEEE Trans. Instrum. Meas. 2018, 67, 894–904. [Google Scholar] [CrossRef]
- Poulose, A.; Eyobu, O.S.; Han, D.S. An indoor position-estimation algorithm using smartphone IMU sensor data. IEEE Access 2019, 7, 11165–11177. [Google Scholar] [CrossRef]
- Zegeye, W.K.; Amsalu, S.B.; Astatke, Y.; Moazzami, F. WiFi RSSI Fingerprinting Indoor Localization for Mobile Devices. In Proceedings of the IEEE 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference, New York, NY, USA, 20–22 October 2016; pp. 1–6. [Google Scholar]
- Shu, Y.; Huang, Y.; Zhang, J.; Coue, P.; Cheng, P.; Chen, J.; Shin, K.G. Gradient-based fingerprinting for indoor localization and tracking. IEEE Trans. Ind. Electron. 2016, 63, 2424–2433. [Google Scholar] [CrossRef]
- Zhou, H.; Jin, M.; Jiang, H.; Xie, L.; Spanos, C.J. WinPS: WiFi-based non-intrusive indoor positioning system with online radio map construction and adaptation. IEEE Trans. Wirel. Commun. 2017, 16, 8118–8130. [Google Scholar] [CrossRef]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of fingerprints for indoor WiFi localization based on Gaussian process regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Chen, C.; Chen, Y.; Han, Y.; Lai, H.-Q.; Liu, K.J.R. Achieving centimetre-accuracy indoor localization on WiFi platforms: A frequency hopping approach. IEEE Internet Things J. 2017, 4, 111–121. [Google Scholar]
- Tao, Y.; Zhao, L. A novel system for WiFi radio map automatic adaptation and indoor positioning. IEEE Trans. Veh. Technol. 2018, 67, 10683–10692. [Google Scholar] [CrossRef]
- Saab, S.S.; Nakad, Z. A standalone RFID indoor positioning system using passive tags. IEEE Trans. Ind. Electron. 2011, 58, 1961–1970. [Google Scholar] [CrossRef]
- Subedi, S.; Pauls, E.; Zhang, Y.D. Accurate localization and tracking of a passive RFID reader based on RSSI measurement. IEEE J. Radio Freq. Identif. 2017, 1, 144–154. [Google Scholar] [CrossRef]
- Wei, D.; Hung, W.; Wu, K.-L. A Real Time RFID Locationing System Using Phased Array Antennas for Warehouse Management. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, Puerto Rico, 26 June–1 July 2016; pp. 1153–1154. [Google Scholar]
- DiGiampaolo, E.; Martinelli, F. A robotic system for localization of passive UHF-RFID tagged objects on shelves. IEEE Sens. J. 2018, 18, 8558–8568. [Google Scholar] [CrossRef]
- Ma, Y.; Tian, C.; Jiang, Y. A multi-tag cooperative localization algorithm based on weighted multidimensional scaling for passive UHF RFID. IEEE Internet Things J. 2019, 6, 6548–6555. [Google Scholar] [CrossRef]
- Wum, H.; Gong, Z.; Yin, Z.; Ding, H. A fast UHF RFID localization method using unwrapped phase-position model. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1698–1707. [Google Scholar]
- Shangguan, L.; Yang, Z.; Liu, A.X.; Zhou, Z.; Liu, Y. STPP: Spatial-temporal phase profiling-based method for relative RFID tag localization. IEEE ACM Trans. Netw. 2017, 25, 596–609. [Google Scholar] [CrossRef]
- Halder, S.; Ghosal, A. A survey on mobility-assisted localization techniques in wireless sensor networks. J. Netw. Comput. Appl. 2016, 60, 82–94. [Google Scholar] [CrossRef]
- Oguntala, G.; Abd-Alhmeed, R.; Jones, S.; Noras, J.; Patwary, M.; Rodriguez, J. Indoor location identification technologies for real-time IoT-based applications: An inclusive survey. Comput. Sci. Rev. 2018, 30, 55–79. [Google Scholar] [CrossRef]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via Ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Proc. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Ridolfi, M.; Vandermeeren, S.; Defraye, J.; Steendam, H.; Gerlo, J.; Clercq, D.D.; Hoebeke, J.; Poorter, E.D. Experimental evaluation of UWB indoor positioning for support postures. Sensors 2018, 18, 168. [Google Scholar] [CrossRef] [Green Version]
- Yang, X. NLOS mitigation for UWB localization based on sparse pseudo-input Gaussian process. IEEE Sens. J. 2018, 18, 4311–4316. [Google Scholar] [CrossRef]
- Xu, Y.; Shmaliy, Y.S.; Ahn, C.K.; Tian, G.; Chen, X. Robust and accurate UWB-based indoor robot localization using integrated EKF/EFIR filtering. IET Radar Sonar Nav. 2018, 12, 750–756. [Google Scholar] [CrossRef]
- Yuan, Q.; Chen, I.M. Localization and velocity tracking of human via 3IMU sensors. Sens. Actuators A Phys. 2014, 212, 25–33. [Google Scholar] [CrossRef]
- Kyritsis, K.; Diou, C.; Delopoulos, A. Modeling wrist micromovements to measure in-meal eating behavior from inertial sensor data. IEEE J. Biomed. Health 2019, 23, 2325–2334. [Google Scholar] [CrossRef] [Green Version]
- Mazomenos, E.B.; Biswas, D.; Cranny, A.; Rajan, A.; Maharatna, K.; Achner, J.; Klemke, J.; Jöbges, M.; Ortmann, S.; Langendörfer, P. Detecting elementary arm movements by tracking upper limb joint angles with MARG sensors. IEEE J. Biomed. Health 2016, 20, 1088–1099. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Höflinger, F.; Reindl, L. Inertial sensor based indoor localization and monitoring system for emergency responders. IEEE Sens. J. 2013, 13, 838–848. [Google Scholar] [CrossRef]
- Zheng, L.; Zhou, W.; Tang, W.; Zheng, X.; Peng, A.; Zheng, H. A 3D indoor positioning system based on low-cost MEMS sensors. Simul. Model. Pract. Theory 2016, 65, 45–56. [Google Scholar] [CrossRef]
- Corrales, J.A.; Candelas, F.; Torres, F. Hybrid Tracking of Human Operators Using IMU/UWB Data Fusion by a Kalman Filter. In Proceedings of the 2008 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI), Amsterdam, The Netherlands, 12–15 March 2008; pp. 193–200. [Google Scholar]
- Wang, Y.; Li, X. The IMU/UWB fusion positioning algorithm based on Particle filter. ISPRS Int. J. Geo Inf. 2017, 6, 235. [Google Scholar] [CrossRef] [Green Version]
- Sasiadek, J.Z.; Hartana, P. GPS/INS sensor fusion for accurate positioning and navigation based on Kalman filtering. IFAC Proc. Vol. 2004, 37, 115–120. [Google Scholar] [CrossRef]
- Murata, M.; Ahmetovic, D.; Sato, D.; Takagi, H.; Kitani, K.M.; Asakawa, C. Smartphone-based localization for blind navigation in building-scale indoor environments. Pervasive Mob. Comput. 2019, 57, 14–32. [Google Scholar] [CrossRef] [Green Version]
- Jiang, C.; Fahad, M.; Guo, Y.; Chen, Y. Robot-assisted smartphone localization for human indoor tracking. Robot Auton. Syst. 2018, 106, 82–94. [Google Scholar] [CrossRef]
- Zhang, P.; Zhao, Q.; Niu, X.; Zhuang, Y.; Liu, J. Collaborative WiFi fingerprinting using sensor-based navigation on smart phones. Sensors 2015, 15, 17534–17557. [Google Scholar] [CrossRef]
- Shi, Q.; Zhao, S.; Cui, X.; Lu, M.; Jia, M. Anchor self-localization algorithm based on UWB ranging and inertial measurement. Tsinghua Sci. Technol. 2019, 24, 728–737. [Google Scholar] [CrossRef]
- Xu, C.; He, J.; Zhang, X.; Yao, C.; Tsetng, P.H. Geometrical kinematic modeling on human motion using method of multi-sensor fusion. Inf. Fusion 2018, 41, 243–254. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.; Khoshelham, K. A robust and adaptive complementary kalman filter based on Mahalanobis distance for Ultra Wideband/Inertial Measurement Unit fusion positioning. Sensors 2018, 18, 3435. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, C.; He, J.; Li, Y.; Zhang, X.; Zhou, X.; Duan, S. Optimal estimation and fundamental limits for target localization using IMU/TOA fusion method. IEEE Access 2019, 7, 28124–28136. [Google Scholar] [CrossRef]
- Zhong, S.; Zhang, K.; Zhu, G.; Liu, S. UWB-Inertial Fusion Location Algorithm Based on Kalman Filtering. In Proceedings of the 15th International Conference on Control, Automation, Robotics and Vision, Singapore, 18–21 November 2018; pp. 574–578. [Google Scholar]
- Lee, J.Y.; Scholtz, R.A. Ranging in a dense multipath environment using an UWB radio link. IEEE J. Sel. Area. Commun. 2002, 20, 1677–1683. [Google Scholar]
- Hakyong, K. Double-sided two-way ranging algorithm to reduce ranging time. IEEE Commun. Lett. 2009, 13, 486–488. [Google Scholar]
- Li, X.; Hua, B.; Shang, Y.; Xiong, Y. A robust localization algorithm in wireless sensor networks. Front. Comput. Sci. China 2008, 2, 438–450. [Google Scholar] [CrossRef]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; The Institution of Electrical Engineers: Hertfordshire, UK, 2004. [Google Scholar]
- Lauro, O.; Johann, B. Non-GPS navigation for security personnel and first responders. J. Navig. 2007, 60, 391–407. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Technology | Accuracy | Pros | Cons |
|---|---|---|---|---|
| WiFi [19] | * RSSI fingerprinting | 1–2 m | Low cost, simple system | Data base required for fingerprinting, low accuracy |
| UWB [20] | † ToA/TDoA/AoA | 0.1–1 m | High accuracy, simple system | Short range problems in NLoS |
| RFID [21] | RSSI | Connectivity range | Low power, low cost | Low accuracy, one tag per location, complex system |
| Inertial measurement [22] | Acceleration, angular velocity, magnetometer | 1–5% of the traveling distance | Compact size, low cost, NLoS # | Position/orientation drift, magnetic disturbance, accumulated error in calculation |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhang, Z.; Gao, N.; Xiao, Y.; Meng, Z.; Li, Z. Cost-Effective Wearable Indoor Localization and Motion Analysis via the Integration of UWB and IMU. Sensors 2020, 20, 344. https://doi.org/10.3390/s20020344
Zhang H, Zhang Z, Gao N, Xiao Y, Meng Z, Li Z. Cost-Effective Wearable Indoor Localization and Motion Analysis via the Integration of UWB and IMU. Sensors. 2020; 20(2):344. https://doi.org/10.3390/s20020344
Chicago/Turabian StyleZhang, Hui, Zonghua Zhang, Nan Gao, Yanjun Xiao, Zhaozong Meng, and Zhen Li. 2020. "Cost-Effective Wearable Indoor Localization and Motion Analysis via the Integration of UWB and IMU" Sensors 20, no. 2: 344. https://doi.org/10.3390/s20020344
APA StyleZhang, H., Zhang, Z., Gao, N., Xiao, Y., Meng, Z., & Li, Z. (2020). Cost-Effective Wearable Indoor Localization and Motion Analysis via the Integration of UWB and IMU. Sensors, 20(2), 344. https://doi.org/10.3390/s20020344